Embed Size (px)
Citation preview

The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
PREPARAÇÃO DE UM BANCO DE HÉLICE PARA CARACTERIZAÇÃO EXPERIMENTAL DO DESEMPENHO DE PEQUENAS HÉLICES
Pedro Marcelo Alves Ferreira Pinto, [email protected]
Giuliano Gardolinski Venson, [email protected]
Departamento de Engenharia Mecânica da Universidade de Taubaté (UNITAU)
Rua Daniel Danelli, s / n - 12060-440, Taubaté-SP, Brasil
Cristiane Aparecida Martins, [email protected]
Departamento de Propulsão, Instituto Tecnológico de Aeronáutica, ITA
Praça Marechal Eduardo Gomes, 50 – 12228-900, São José dos Campos-SP, Brasil
Resumo. Uma das grandes dificuldades para a determinação da hélice ideal para a aplicação em
aeronaves rádio controlada esta associada ao seu desempenho. A escolha ideal do conjunto
moto-propulsor é de grande importância, pois garante uma maior eficiência, melhor qualidade de
voo e menor consumo de combustível. As hélices são diferenciadas pelas características
geométricas definidas pelos seus respectivos fabricantes. As principais características são o
diâmetro, que é definido por duas vezes a distância do centro da hélice até a ponta da pá, e o
passo, que representa o quanto a hélice avança para frente a cada rotação. Entretanto, essas
características são diferentes para cada fabricante, e cada um desenvolve seu projeto através de
otimizações na forma e no perfil aerodinâmico. Este trabalho tem por finalidade descrever toda
caracterização experimental de um banco de hélices para obtenção dos principais parâmetros de
desempenho de uma hélice, como força propulsiva e rotação.
Palavras-chave: Banco de hélice, Hélice, Grupo moto-propulsor, Aeronave rádio-controlada.
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
1. INTRODUÇÃO
Este trabalho descreve os procedimentos de caracterização de um banco de hélices utilizado para
os ensaios experimentais, na condição estática, de quatro diferentes tipos de hélices para
obtenção dos principais parâmetros de desempenho como força propulsiva (tração) e rotação a
fim de avaliar o desempenho característico de cada hélice. Esta caracterização inclui escolha dos
componentes, o desenvolvimento do banco de hélices, o desenvolvimento do sistema de
aquisição de dados, calibração dos sistemas e a realização dos ensaios. Os resultados mostraram
que todo aparato experimental, desenvolvido para o ensaio, foi adequado para o objetivo
proposto.
2. GRUPO MOTO PROPULSOR
O grupo moto-propulsor de aeronaves são dispositivos capazes de gerar empuxo ou tração,
fenômenos aerodinâmicos responsáveis pela movimentação da aeronave em solo ou em voo.
Basicamente são formados por um elemento motor e um elemento propulsivo.
O elemento motor, também chamado núcleo do motor, corresponde a parte do grupo moto-
propulsor responsável pela geração de energia mecânica, utilizada para acionamento do elemento
propulsivo. O elemento propulsivo corresponde a parte do grupo moto-propulsor responsável pela
geração de força propulsiva, obtida através do deslocamento do fluido (ar) na direção oposta
àquela na qual a aeronave é propelida, este pode ser um elemento rotativo tipo hélice.

The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
Figura 1 - Grupo Moto-propulsor à Hélice
3. HÉLICE
As hélices são elementos propulsivos rotativos do grupo moto-propulsor de uma aeronave. Estas
são constituídas de lâminas ou pás, dispostas radialmente e simetricamente em relação ao seu
eixo de rotação, em número de duas (bi-pá), três (tri-pá), quatro (quadri-pá), cinco (penta-pá) ou
mais pás. Cada pá de uma hélice de aeronave é, essencialmente, uma asa rotativa. Como um
resultado de sua construção, as pás da hélice são como aerofólios e produzem forças
aerodinâmicas, que criam o empuxo ou tração, para puxar ou empurrar a aeronave através do ar
podendo ser formadas por uma peça única ou segmentadas em pás independentes.
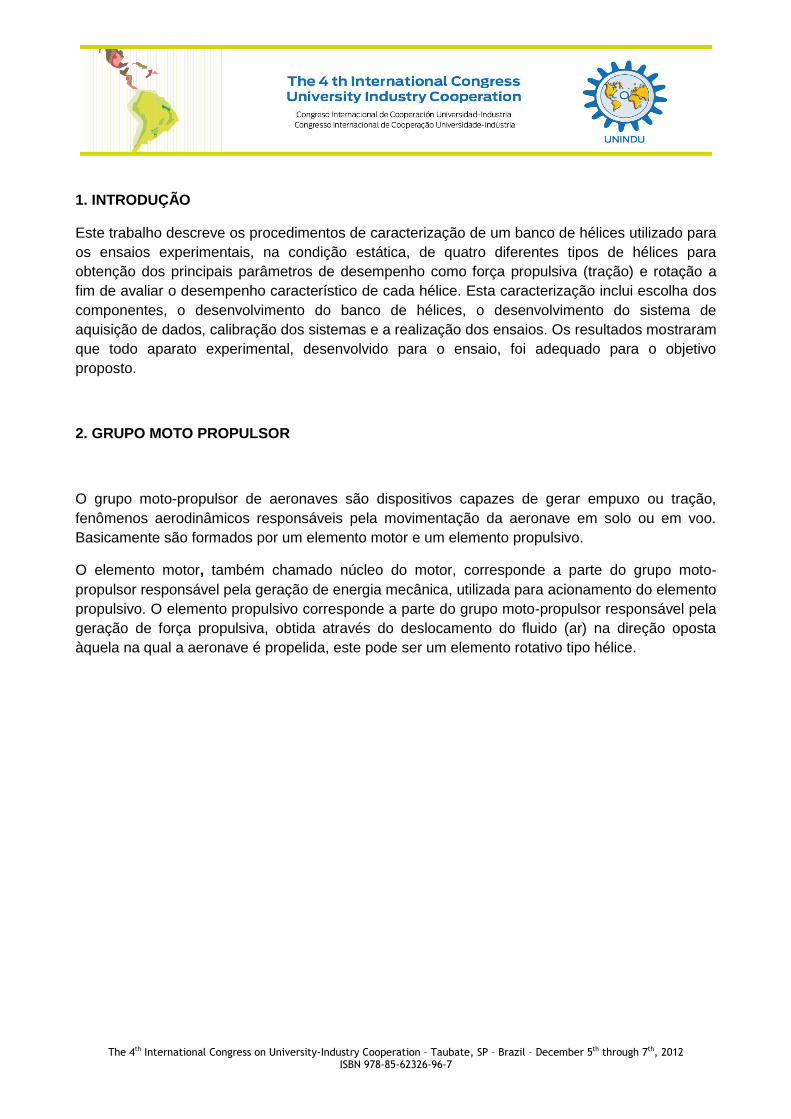
Um hélice é definida por duas dimensões características, o diâmetro e o passo, normalmente
indicados em polegadas. O diâmetro representa a distância entre as pontas das pás para o caso
de uma hélice bi-pá, no caso de hélices mono-pá ou com múltiplas pás, o diâmetro é representado
pela circunferência descrita durante o movimento. O passo representa o avanço (teórico) que a
hélice daria em uma volta. A fig. 2 mostra as principais características geométricas de uma hélice.
Elemento Motor Núcleo motor a hélice
Elemento Propulsivo Hélice
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
Figura 2 - Detalhe da pá de uma Hélice Aeronáutica
4. BANCO DE HÉLICES
Neste capítulo serão abordados os detalhes sobre o desenvolvimento do aparato experimental,
começando pela seleção de componentes, desenvolvimento do banco de hélices,
desenvolvimento do sistema de aquisição de dados calibração dos sistemas para realização dos
ensaios.
4.1 Seleção dos componentes
Para caracterização do desempenho de hélice optou-se pela escolha de um motor elétrico. O
motor elétrico foi escolhido em contrapartida a um motor de combustão interna para permitir
ensaios mais seguros, mais econômicos e em um tempo de preparação menor. Além disso, a
utilização de um motor de corrente contínua permite eliminar as oscilações de rotação inerentes
ao funcionamento de um motor de combustão interna.
O motor elétrico selecionado equivale a um motor de combustão interna a pistão do tipo dois
tempos de 0,61 polegadas cúbicas, com potência nominal de 1,9hp.
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
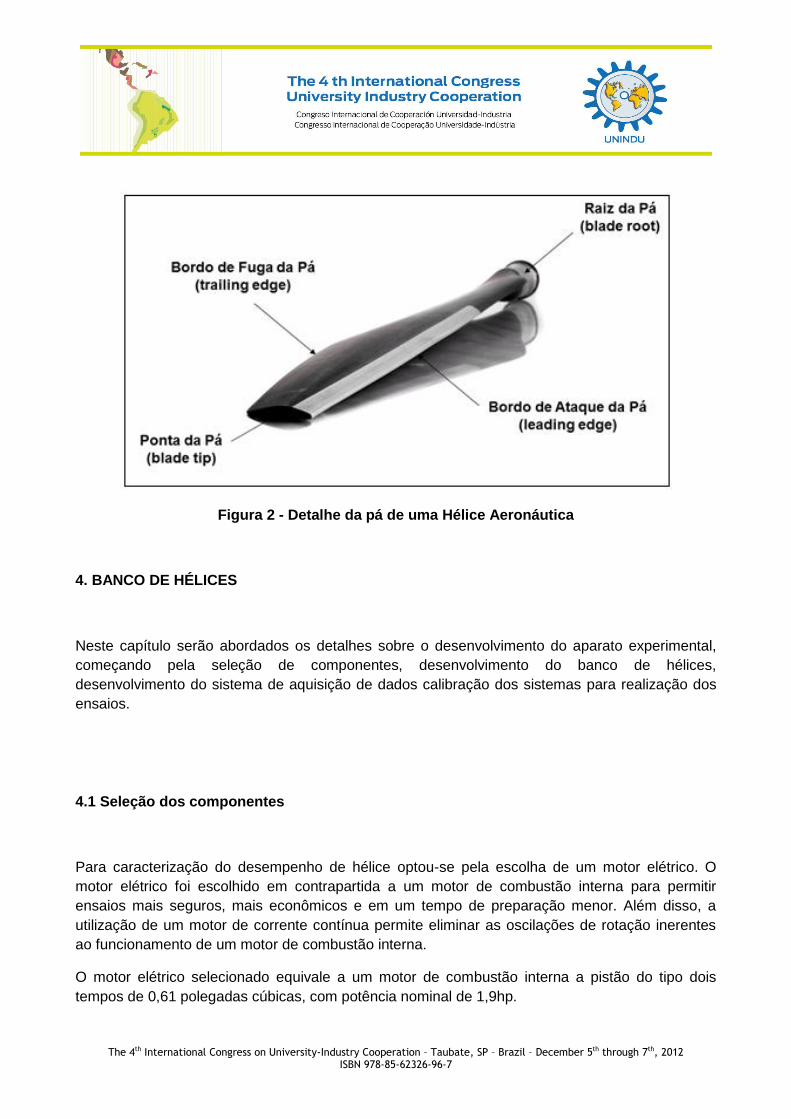
O motor em estudo é o Turningy L5055-700, um motor elétrico trifásico modelo Brushelles
Outrunner de 700rpm/v mostrado n fig.3. A potência e corrente nominal do motor são
respectivamente de 1600W e 60A com um peso de 296g. Esse motor foi selecionado por
apresentar parâmetros equivalentes a de um motor a pistão de 0,61 polegadas cubicas.
Figura 3 - Motor Turningy L5055-700
A bateria utilizada é a Zippy Flightmax 5000mAh 6S1P mostrada na fig.4. Essa bateria de LiPo
composta por Polímeros de Lithium de 6 células e tenção nominal 22,2V (3,7V por célula), possui
capacidade de 5000 miliampére-hora e peso igual a 834g. Essa bateria foi selecionada em função
das características do motor, a mesma apresenta uma capacidade de descarga igual a 40C
constante, ou seja, 200 amperes de corrente por hora.

The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
Figura 4 - Bateria Zippy Flightmax 5000mAh 6S1P
O Speed control selecionado foi o Red Brinck 70A mostrado na fig.5, também escolhido
proporcionalmente ao motor. Este componente de capacidade nominal máxima de 70 amperes é
utilizado para o controle da rotação do motor. O mesmo tem a função de converter o sinal
recebido da bateria na forma de corrente contínua em corrente alternada utilizada pelo motor.
Figura 5 - Speed Control Red Brick 70A

The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
O Watt Meter utilizado é o HK-010, mostrado na fig.6. Este componente será utilizado para o
monitoramento e aquisição de parâmetros em tempo real como corrente (ampere) e tensão (volts)
consumida pelo motor além de fornecer informações indispensáveis sobre a bateria como
autonomia e condições de balanceamento das células. O Watt Metter apresenta capacidade
nominal de voltagem de 0 a 60V, amperagem de 0 a 100A e potência máxima de 6000W com
peso igual a 140g.
Figura 6 - Watt Metter HK-010
Para as medições da tração geradas pelo motor foi utilizado um sistema de medição de forças
baseado numa balança modelo AFA3 de 3 eixos, dispositivo complementar do túnel de vento
subsônico do laboratório de ensaios da Universidade de Taubaté, na qual a conexão do conjunto
é feita através de uma haste com a função de transferir o esforço gerado pelo conjunto moto
propulsor para uma célula de carga. Essa célula, que possui faixa de medição até 10kg, consiste
de um sistema de “strain gages” na forma de ponte de Wheatstone, a qual converte o sinal de
força aplicada à haste em um sinal de tensão. A balança, o túnel de vento e a célula de carga são
mostrados nas fig. 7, 8 e 9.

The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
Figura 7 - Balança Modelo AFA3
Figura 8 - Túnel de Vento Subsônico do Laboratório de Ensaios da Universidade de Taubaté

The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
Figura 9 - Célula de Carga da Tração
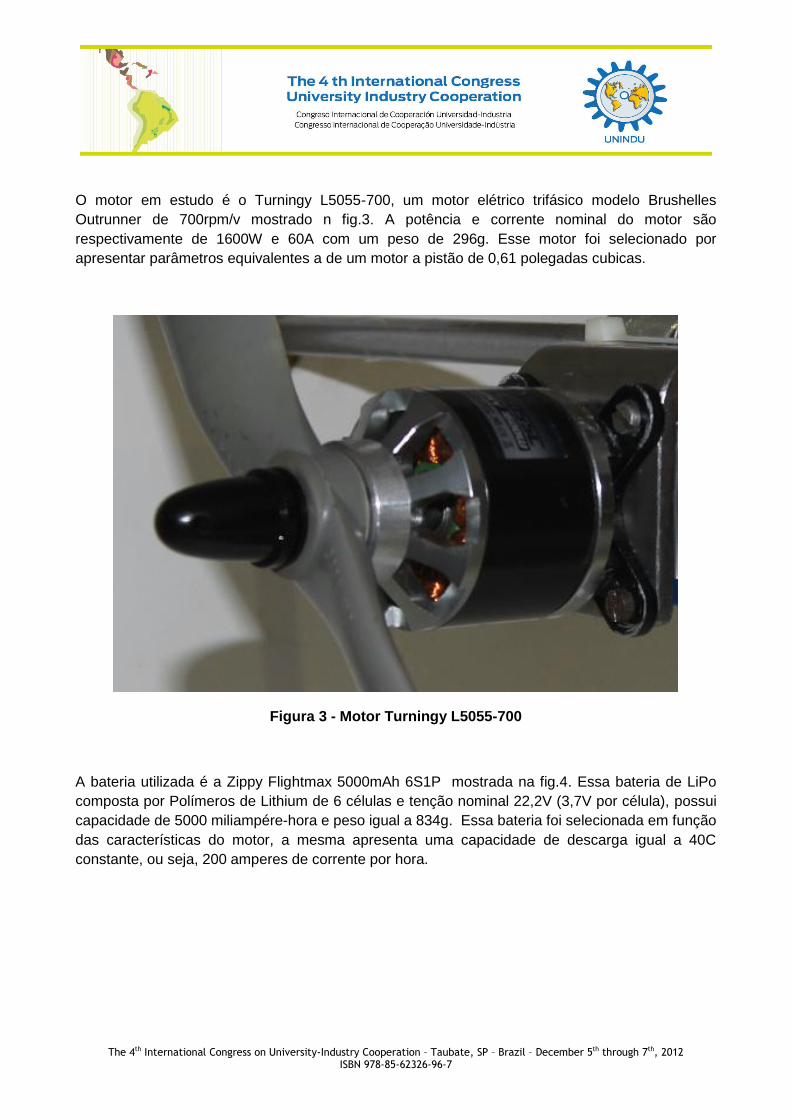
A rotação do motor é obtida através de um sensor ótico posicionado no corpo do motor. O sensor
ótico consiste de um foto-transistor interligado a um emissor de luz infravermelha do tipo LED. Na
superfície do corpo do motor é colocado um material reflexivo, o qual reflete a luz emitida pelo
LED que é captada pelo foto-transistor.
O sistema de condicionamento de sinal do sensor de rotação gera assim um sinal analógico cujo
nível de tensão é proporcional à rotação do motor. O sensor de rotação e seu posicionamento no
corpo do motor são mostrados na fig.10
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
Figura 10 - Sensor de Rotação
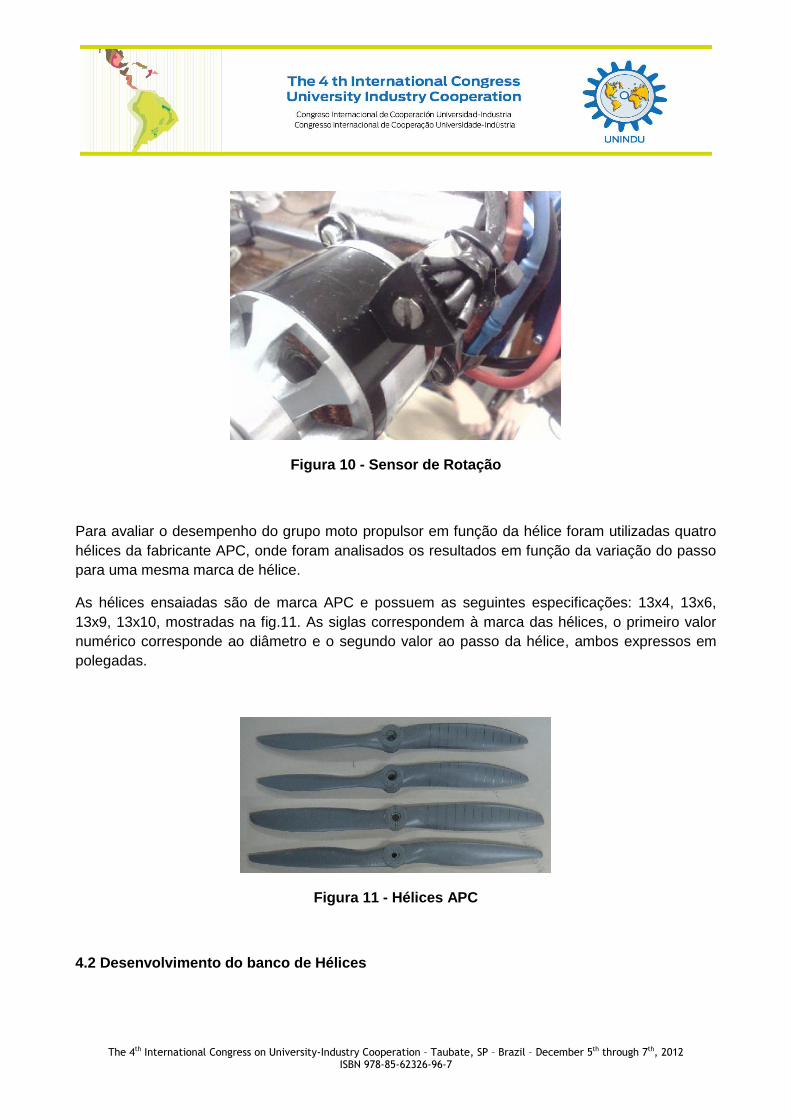
Para avaliar o desempenho do grupo moto propulsor em função da hélice foram utilizadas quatro
hélices da fabricante APC, onde foram analisados os resultados em função da variação do passo
para uma mesma marca de hélice.
As hélices ensaiadas são de marca APC e possuem as seguintes especificações: 13x4, 13x6,
13x9, 13x10, mostradas na fig.11. As siglas correspondem à marca das hélices, o primeiro valor
numérico corresponde ao diâmetro e o segundo valor ao passo da hélice, ambos expressos em
polegadas.
Figura 11 - Hélices APC
4.2 Desenvolvimento do banco de Hélices

The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
O banco de hélice constitui de uma instalação para acomodação total e segura dos componentes
necessários para a realização dos ensaios. A estrutura do banco é composta basicamente de um
chassi, para a acomodação dos componentes, ligado através de uma haste a uma balança que
fará a medição da tração gerada pelo conjunto. O chassi de sustentação do motor agrega ainda
uma bateria, para alimentação do motor, um speed control, utilizado para o controle da rotação do
motor, um sensor de rotação e um watt meter, utilizado para aquisição de alguns parâmetros em
tempo real. O banco de hélice é mostrado na fig.12.
Figura 12 - Banco de Hélices
4.3 Sistema de Aquisição de Dados
O sistema de aquisição de dados foi desenvolvido em uma linguagem de programação gráfica,
LabVIEW, na sua versão 2009. O LabVIEW (acrônimo para Laboratory Virtual Instruments
Engineering Workbench) foi desenvolvido no final da década de 80 pela National Instruments Inc,
para ambientes de janelas (tipo Windows) e faz uso do conceito de Virtual Instrument (VI) uma
realidade prática com o objetivo de utilizar um computador de uso geral para imitar instrumentos
reais com o uso dos seus controles e mostradores particulares. Com esse software, por exemplo,
pode-se encontrar aplicabilidade em sistemas de medição, como monitoramento de processos e
aplicações de controle.
O LabVIEW é uma linguagem de programação gráfica que usa ícones no lugar de linhas de texto
para criar aplicações. Em contraste com as linguagens baseadas em texto, onde as instruções
determinam a execução do programa, o LabVIEW usa uma programação tipo fluxo de dados,
onde este fluxo determina a execução. A interface entre o usuário e o programa é realizada
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
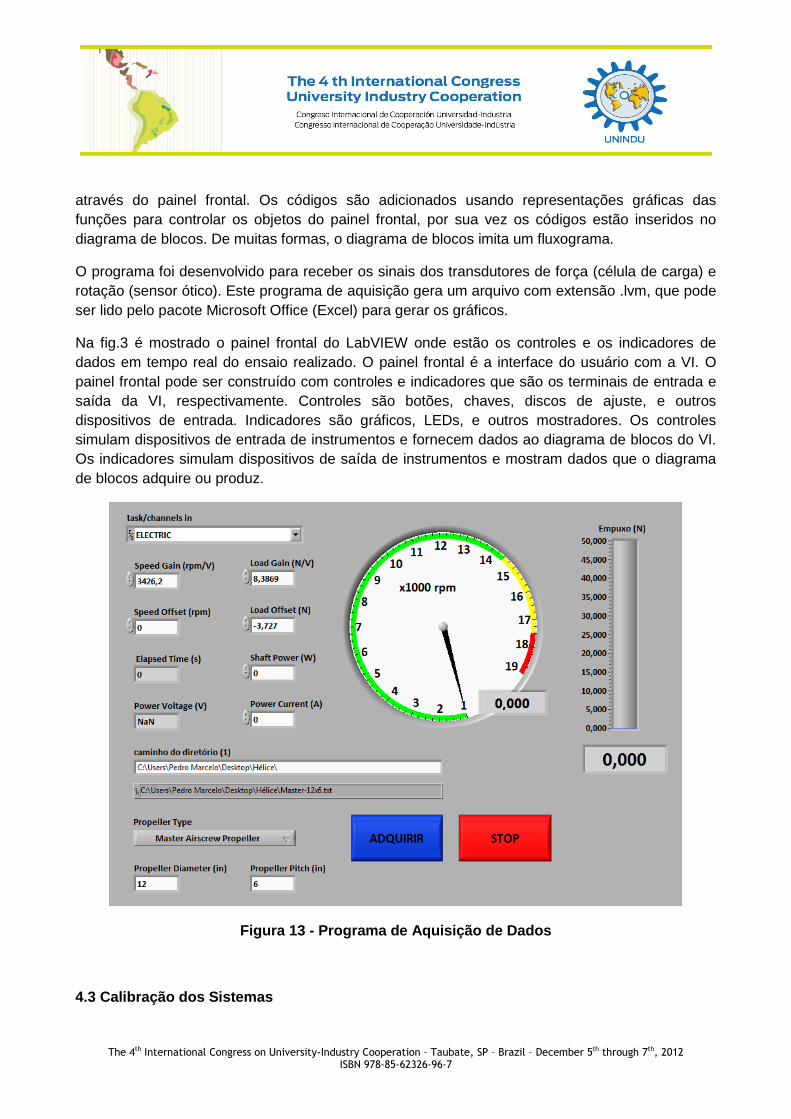
através do painel frontal. Os códigos são adicionados usando representações gráficas das
funções para controlar os objetos do painel frontal, por sua vez os códigos estão inseridos no
diagrama de blocos. De muitas formas, o diagrama de blocos imita um fluxograma.
O programa foi desenvolvido para receber os sinais dos transdutores de força (célula de carga) e
rotação (sensor ótico). Este programa de aquisição gera um arquivo com extensão .lvm, que pode
ser lido pelo pacote Microsoft Office (Excel) para gerar os gráficos.
Na fig.3 é mostrado o painel frontal do LabVIEW onde estão os controles e os indicadores de
dados em tempo real do ensaio realizado. O painel frontal é a interface do usuário com a VI. O
painel frontal pode ser construído com controles e indicadores que são os terminais de entrada e
saída da VI, respectivamente. Controles são botões, chaves, discos de ajuste, e outros
dispositivos de entrada. Indicadores são gráficos, LEDs, e outros mostradores. Os controles
simulam dispositivos de entrada de instrumentos e fornecem dados ao diagrama de blocos do VI.
Os indicadores simulam dispositivos de saída de instrumentos e mostram dados que o diagrama
de blocos adquire ou produz.
Figura 13 - Programa de Aquisição de Dados
4.3 Calibração dos Sistemas
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
Antes dos ensaios do conjunto moto-propulsor, foi realizada a calibração dos transdutores de
força, célula de carga, e rotação, sensor ótico, responsáveis pela medição dos parâmetros a
serem analisados.
Calibração da Célula de Carga. Como as células de carga estão ligadas a um sistema de
condicionamento e amplificação de sinal de ganho variável, torna-se necessário uma calibração
diária para cada rodada de ensaios no motor. Os condicionadores são pré-ajustados para
promoverem um sinal de saída na faixa de tensão adequada ao sistema de aquisição. No caso da
célula de carga da tração a correspondência de pré-ajuste é 0V de tensão para 0kg de carga na
célula e 3.5V para 10kg.
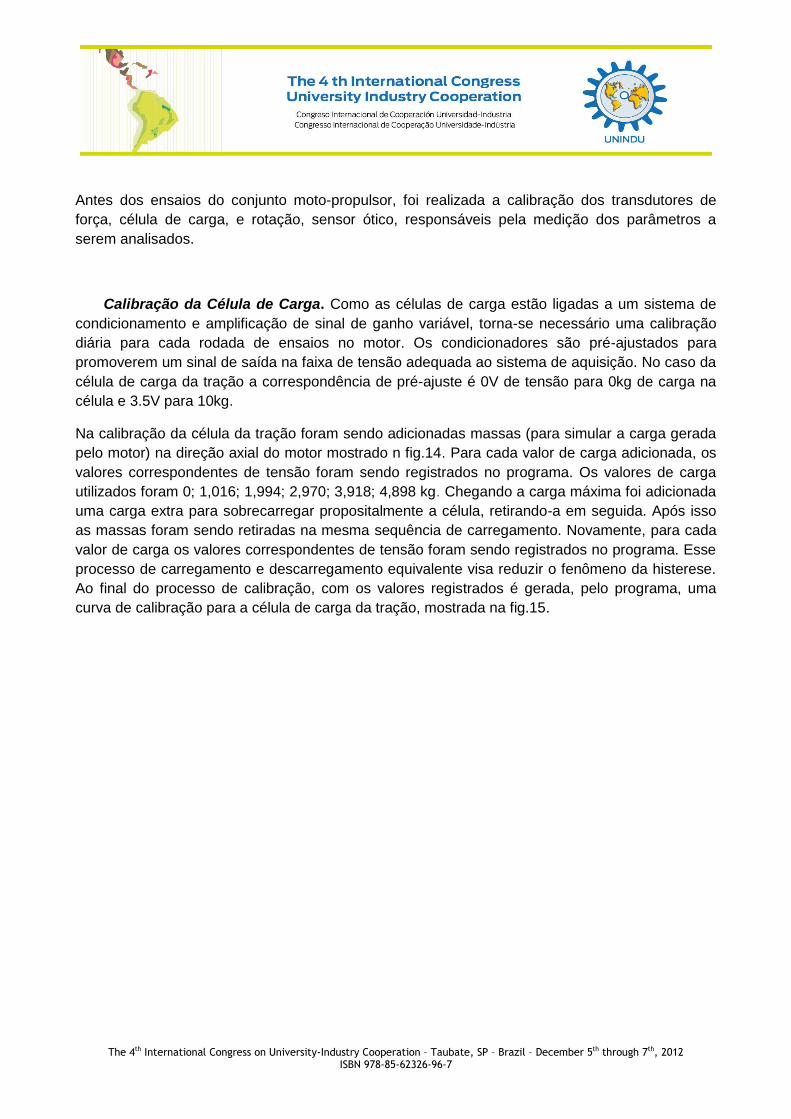
Na calibração da célula da tração foram sendo adicionadas massas (para simular a carga gerada
pelo motor) na direção axial do motor mostrado n fig.14. Para cada valor de carga adicionada, os
valores correspondentes de tensão foram sendo registrados no programa. Os valores de carga
utilizados foram 0; 1,016; 1,994; 2,970; 3,918; 4,898 kg. Chegando a carga máxima foi adicionada
uma carga extra para sobrecarregar propositalmente a célula, retirando-a em seguida. Após isso
as massas foram sendo retiradas na mesma sequência de carregamento. Novamente, para cada
valor de carga os valores correspondentes de tensão foram sendo registrados no programa. Esse
processo de carregamento e descarregamento equivalente visa reduzir o fenômeno da histerese.
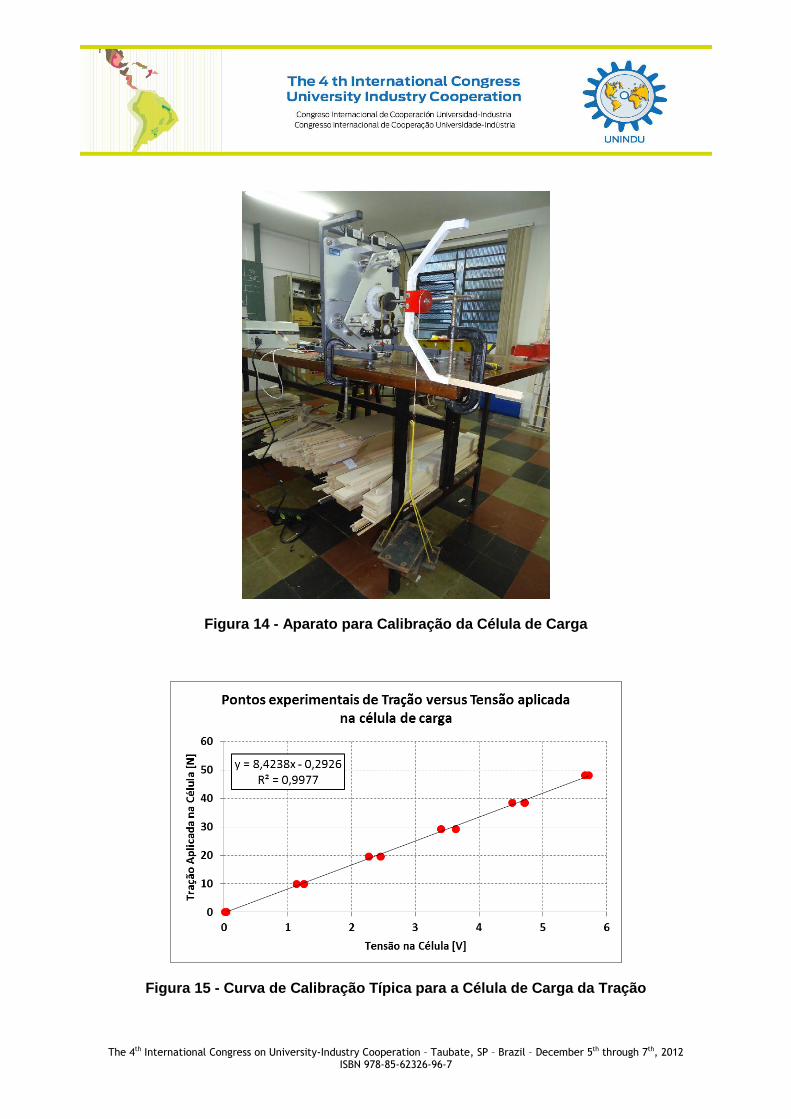
Ao final do processo de calibração, com os valores registrados é gerada, pelo programa, uma
curva de calibração para a célula de carga da tração, mostrada na fig.15.
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
Figura 14 - Aparato para Calibração da Célula de Carga
Figura 15 - Curva de Calibração Típica para a Célula de Carga da Tração
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
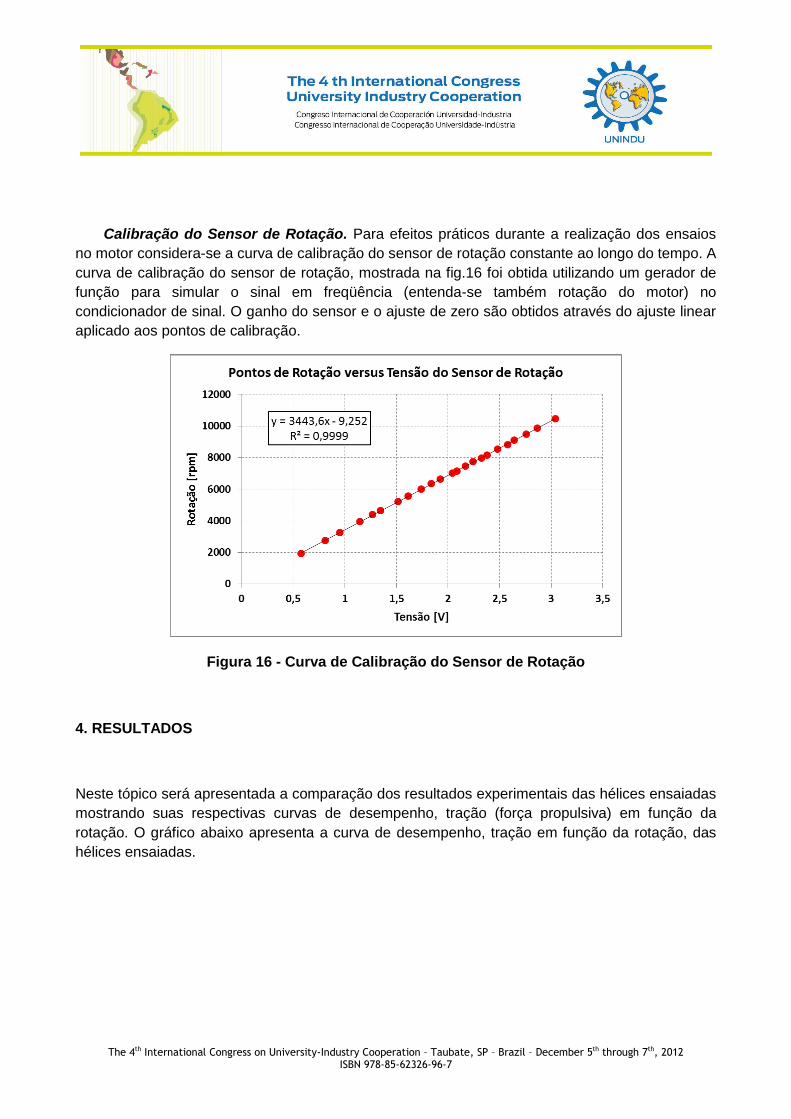
Calibração do Sensor de Rotação. Para efeitos práticos durante a realização dos ensaios
no motor considera-se a curva de calibração do sensor de rotação constante ao longo do tempo. A
curva de calibração do sensor de rotação, mostrada na fig.16 foi obtida utilizando um gerador de
função para simular o sinal em freqüência (entenda-se também rotação do motor) no
condicionador de sinal. O ganho do sensor e o ajuste de zero são obtidos através do ajuste linear
aplicado aos pontos de calibração.
Figura 16 - Curva de Calibração do Sensor de Rotação
4. RESULTADOS
Neste tópico será apresentada a comparação dos resultados experimentais das hélices ensaiadas
mostrando suas respectivas curvas de desempenho, tração (força propulsiva) em função da
rotação. O gráfico abaixo apresenta a curva de desempenho, tração em função da rotação, das
hélices ensaiadas.
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
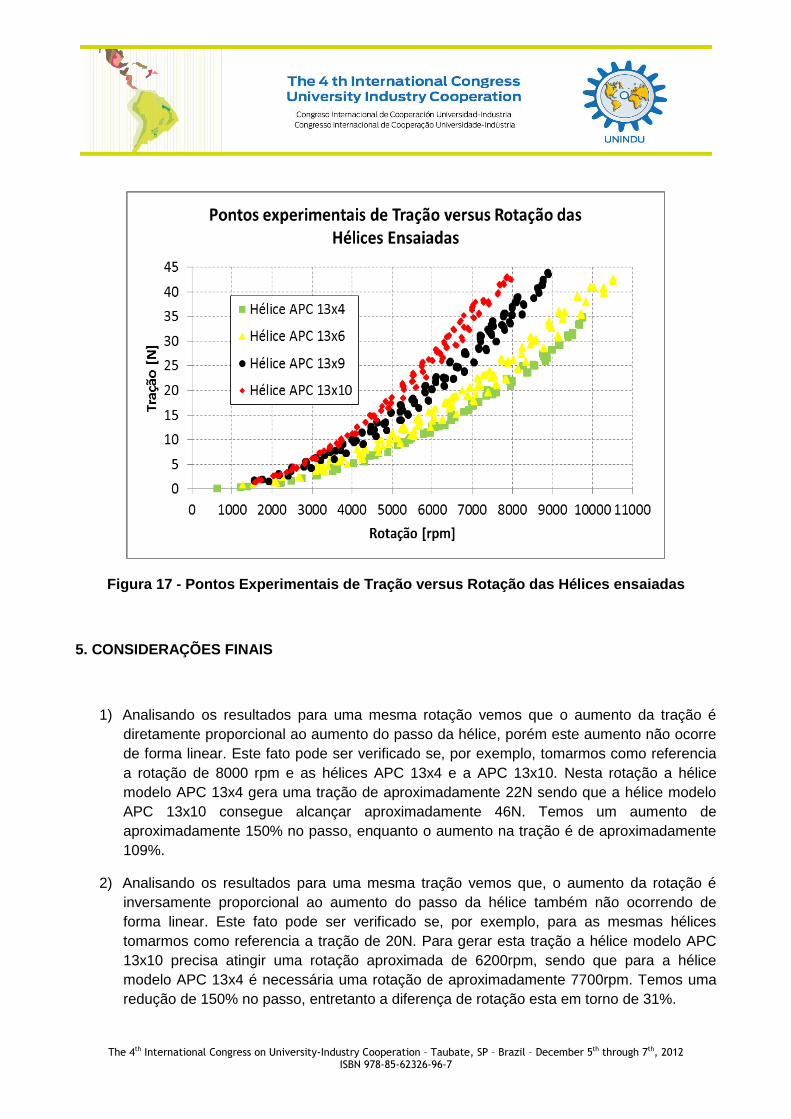
Figura 17 - Pontos Experimentais de Tração versus Rotação das Hélices ensaiadas
5. CONSIDERAÇÕES FINAIS
1) Analisando os resultados para uma mesma rotação vemos que o aumento da tração é
diretamente proporcional ao aumento do passo da hélice, porém este aumento não ocorre
de forma linear. Este fato pode ser verificado se, por exemplo, tomarmos como referencia
a rotação de 8000 rpm e as hélices APC 13x4 e a APC 13x10. Nesta rotação a hélice
modelo APC 13x4 gera uma tração de aproximadamente 22N sendo que a hélice modelo
APC 13x10 consegue alcançar aproximadamente 46N. Temos um aumento de
aproximadamente 150% no passo, enquanto o aumento na tração é de aproximadamente
109%.
2) Analisando os resultados para uma mesma tração vemos que, o aumento da rotação é
inversamente proporcional ao aumento do passo da hélice também não ocorrendo de
forma linear. Este fato pode ser verificado se, por exemplo, para as mesmas hélices
tomarmos como referencia a tração de 20N. Para gerar esta tração a hélice modelo APC
13x10 precisa atingir uma rotação aproximada de 6200rpm, sendo que para a hélice
modelo APC 13x4 é necessária uma rotação de aproximadamente 7700rpm. Temos uma
redução de 150% no passo, entretanto a diferença de rotação esta em torno de 31%.
The 4th International Congress on University-Industry Cooperation – Taubate, SP – Brazil – December 5th through 7th, 2012 ISBN 978-85-62326-96-7
Com os resultados obtidos conclui-se que todo o aparato experimental desenvolvido para o
ensaio (seleção de componentes, desenvolvimento do banco de hélices,
desenvolvimento do sistema de aquisição de dados, calibração dos sistemas e
realização dos ensaios) foi adequado para o objetivo proposto, estando em total condição
operacional.
Agradecimentos
Agradecimentos aos supervisores e estagiários dos laboratórios de Engenharia Aeronáutica e
Usinagem da Universidade de Taubaté.
REFERÊNCIAS
Heywood J. 1988. “Internal Combustion Engine Fundamentals”. New York: Mc Graw-Hill,
1988.
NELSON, W:C. “Airplane propeller principles” 2ª ed., London: Chapman & Hall, LTD, 1944.
National Instruments. “LabVIEW Basics I Course Manual, Course Software Version 6.0”.
2000.





















![Ata do banco de portugal novo banco[5]](https://img.pdfslide.us/doc/110x75/568c559a1a28ab4916c36999/ata-do-banco-de-portugal-novo-banco5.jpg)







