Embed Size (px)
Citation preview

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC
Satellite Design Course Spacecraft Configuration
Structural DesignPreliminary Design Methods
This material was developed by Rodger Farley (NASA GSFC) for
ENAE 691 (Satellite Design)
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC2
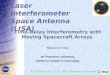
Source of Launch Vehicle Loads

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC3
Typical Loads Time-Line ProfileMax Q
MECOSECO
H2 vehicle to geo-transfer orbit
3rd stage2nd stage
1st stage

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC4
Design Requirements, LoadsMaterial processing, assembling, handlingTestingTransportationLaunch handlingLaunch loads
• Steady state accelerations (max Q, end of burn stages)
• Sinusoidal vibrations, transient (lift off, transonic, MECO, SECO) and steady (resonant burn from solid rocket boosters)
• Acoustic and mechanical random accelerations (lift off, max Q)
• Shock vibrations (payload separation from upper stage adapter)
• Depressurization
Orbit Loads spin-up, de-spin, thermal, deployments, maneuvers

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC5
Configuration Types LEO stellar pointing
Low inclination XTE, HSTHigh inclination WIRE
Articulated solar array Fixed solar array sun-sync orbit
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC6
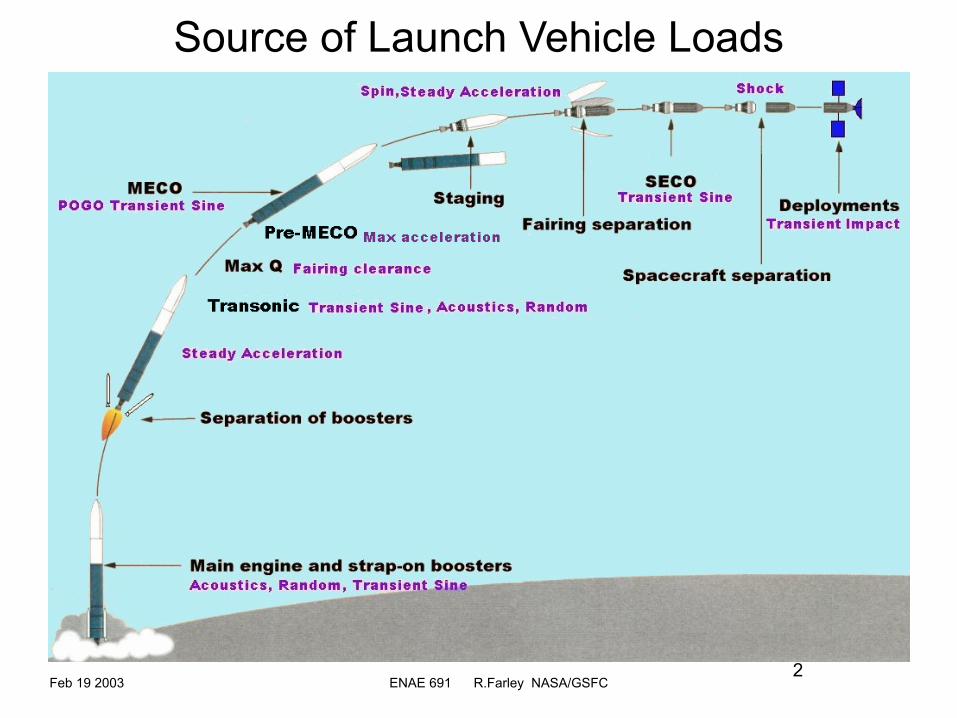
Configuration Types GEO nadir pointing
Articulated s/a spin once per 24 hoursTDRSS A
Intelsat V

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC7
Configuration Types HEO
AXAF-1 CHANDRA required to stare uninterrupted
250m long wire booms, ¼ rpm
IMAGE 2000
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC8
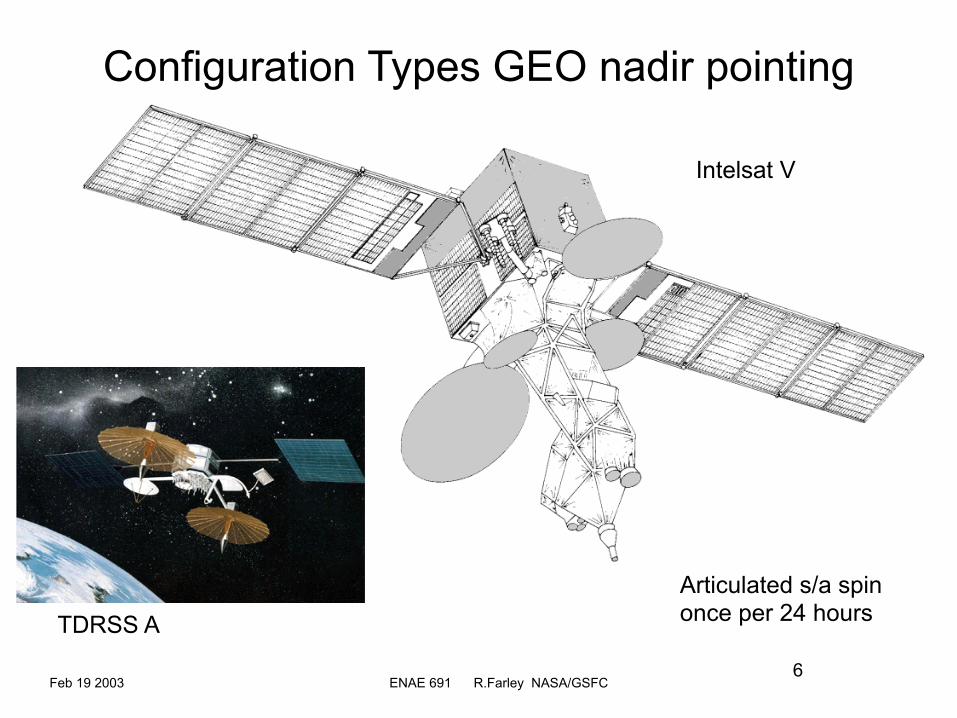
Configuration types misc
MAP at L2Magellan to Venus
Lunar Prospector
Body-mounted s/a
High-gain antenna
Cylindrical, body-mounted solar array
Sun shield

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC9
Structural Configuration Examples• Cylinders and Cones high buckling resistance
• Box structures hanging electronics and equipment
• Triangle structures sometimes needed
• Rings transition structures and interfaces
• Trusses extending a ‘hard point’ (picking up point loads)
• As much as possible, payload connections should be kinematic• Skin Frame, Honeycomb Panels, Machined Panels, Extrusions
NOTE: ALWAYS PROVIDE A STIFF AND DIRECT LOAD PATH! AVOID BENDING!
STRUCTURAL JOINTS ARE BEST IN SHEAR!
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC10
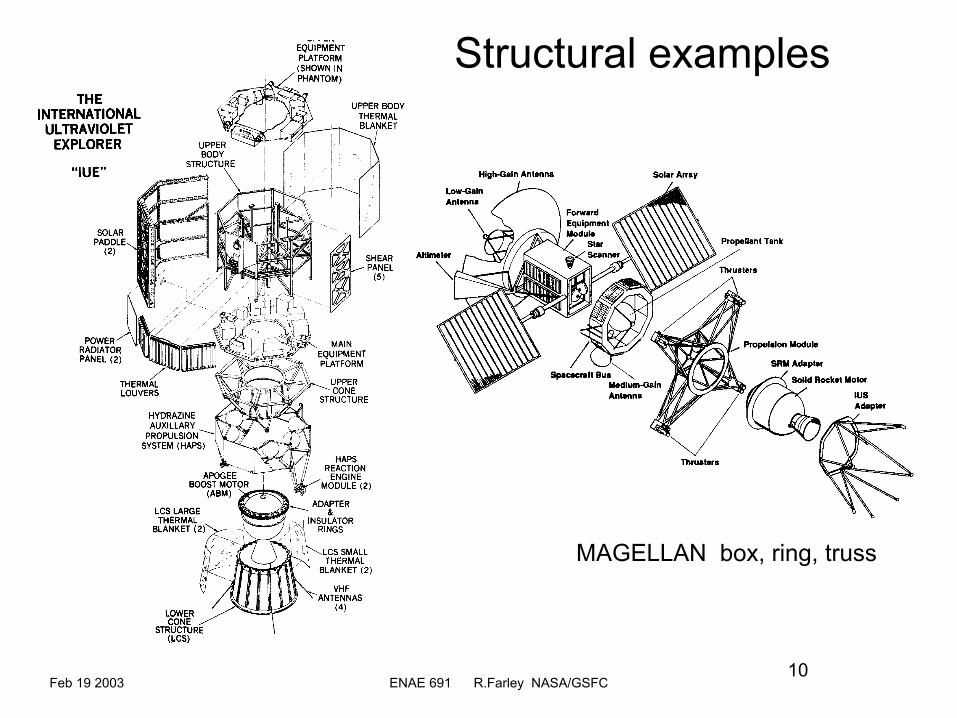
Structural examples
MAGELLAN box, ring, truss
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC11
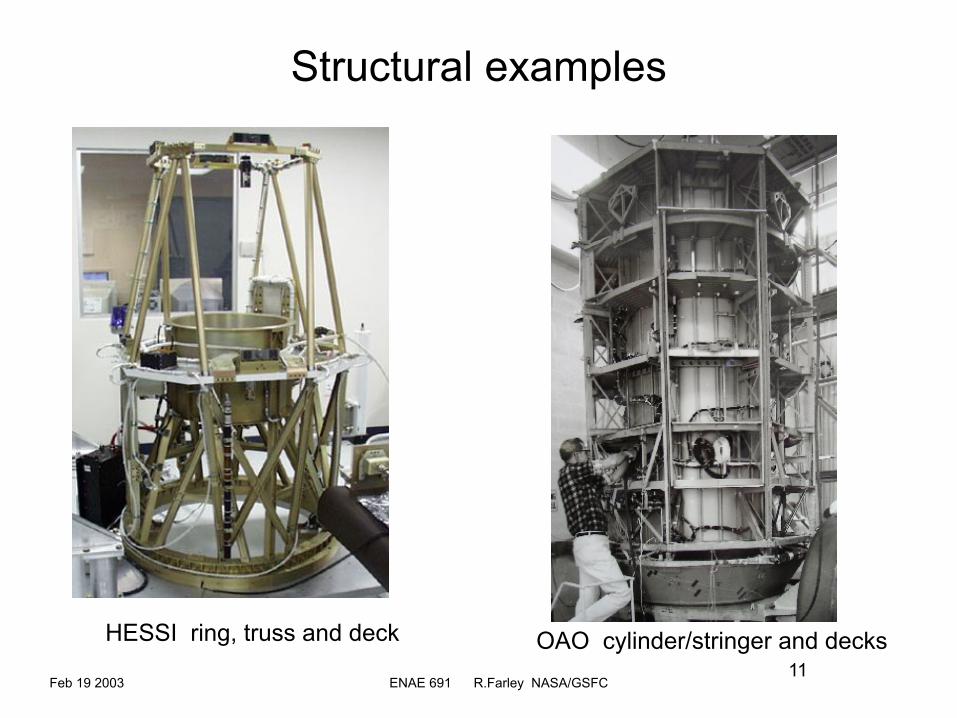
Structural examples
OAO cylinder/stringer and decksHESSI ring, truss and deck

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC12
Structural examples
Reaction wheel ‘pyramid’
Rain Radar
TRMM
Bus structure, cylinder, machined and honeycomb panels
Instrument support truss and panel structure
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC13
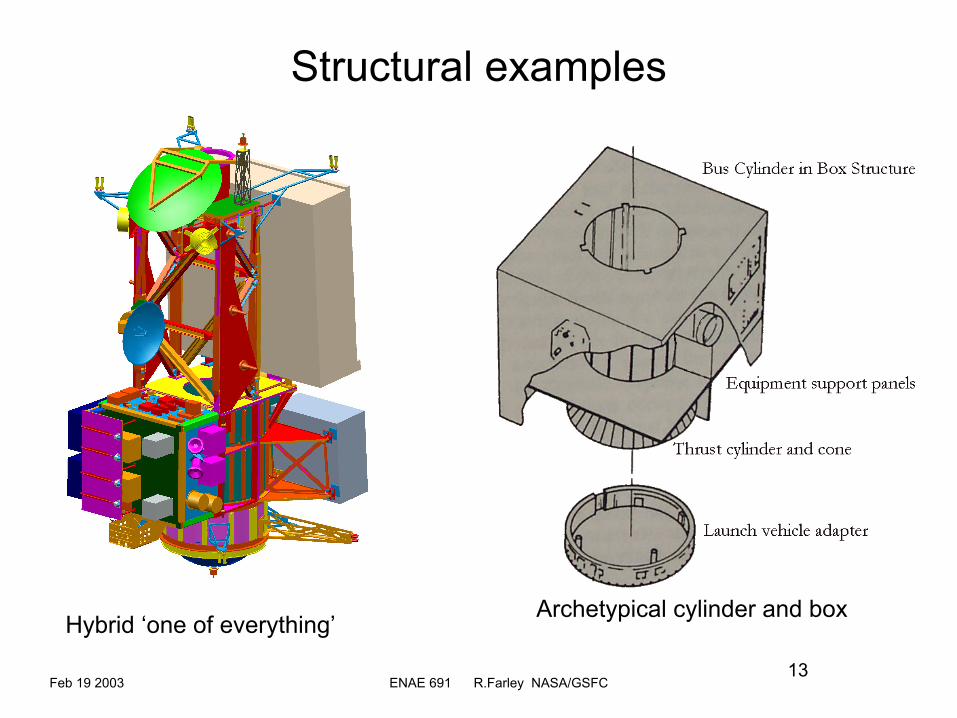
Structural examples
Archetypical cylinder and box Hybrid ‘one of everything’

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC14
Structural examplesEOS aqua, bus
Hard points created at intersections
“Egg crate” composite panel bus structure

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC15
Structural examples
COBE
Delta II version
COBE
STS version
5000 kg !
2171 kg !

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC16
Modular AssemblyInstrument Module –optics, detectorBus Module (house keeping)Propulsion Module
Modules allow separate organizations, procurements, building and testing schedules. It all comes together at observatory integration and test (I&T)
Interface control between modules is very important: structural, electrical, thermal
AXAF

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC17
Anatomy of s/c
Instrument module
Bus module
Propulsion module
Launch Vehicle adapter
Interface structure
Axial viewing, telescope type
Solid kick motor, equatorial mount
Station-keeping hydrazine, polar mountReaction wheels
Deck-mounted or wall-mounted boxes
Kinematic Flexure mounts to remove enforced displacement loads
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC18
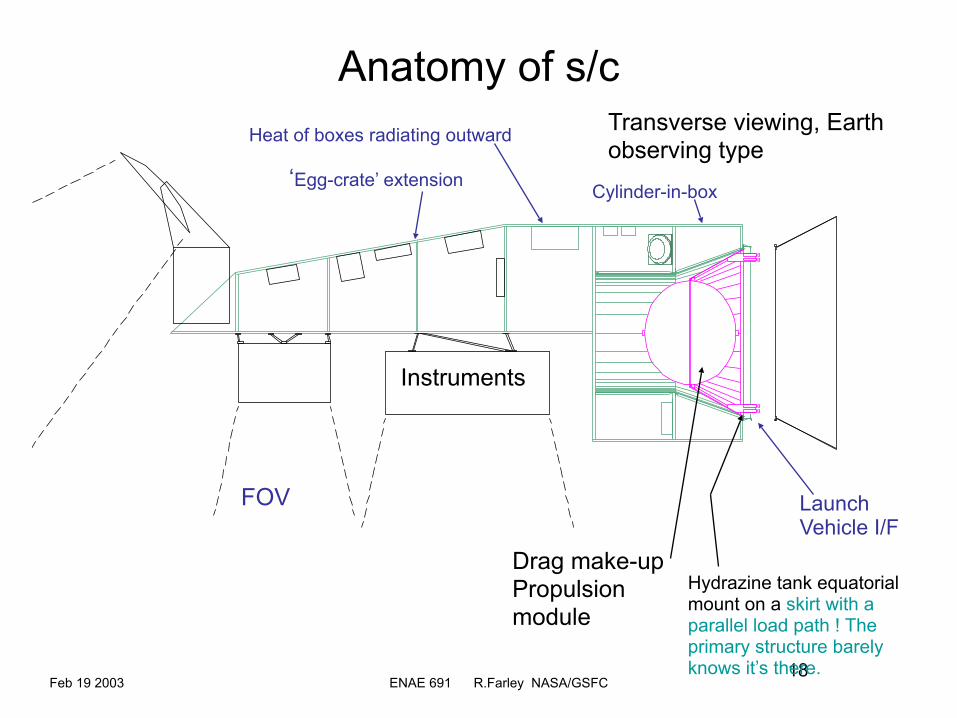
Anatomy of s/cTransverse viewing, Earth observing type
Launch Vehicle I/F
Drag make-up Propulsion module
FOV
Instruments
Cylinder-in-box‘Egg-crate’ extension
Heat of boxes radiating outward
Hydrazine tank equatorial mount on a skirt with a parallel load path ! The primary structure barely knows it’s there.

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC19
Attaching distortion-sensitive components
Ball-in-cone, Ball-in-vee, Ball on flat
Breathes from point ‘3’
2,2,2
Bi-pod legs, tangential flexures
Breathes from center point
Rod flexures arranged in 3,2,1
Breathes from point ‘3’
1,1,1,1,1,1 3
2
1
1
2
3Note: vee points towards cone
3,2,1

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC20
General Arrangement Drawings
• Stowed configuration in Launch Vehicle• Transition orbit configuration• Final on-station deployed configuration• Include Field of View (FOV) for instruments and thermal
radiators, and communication antennas, and attitude control sensors
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC21
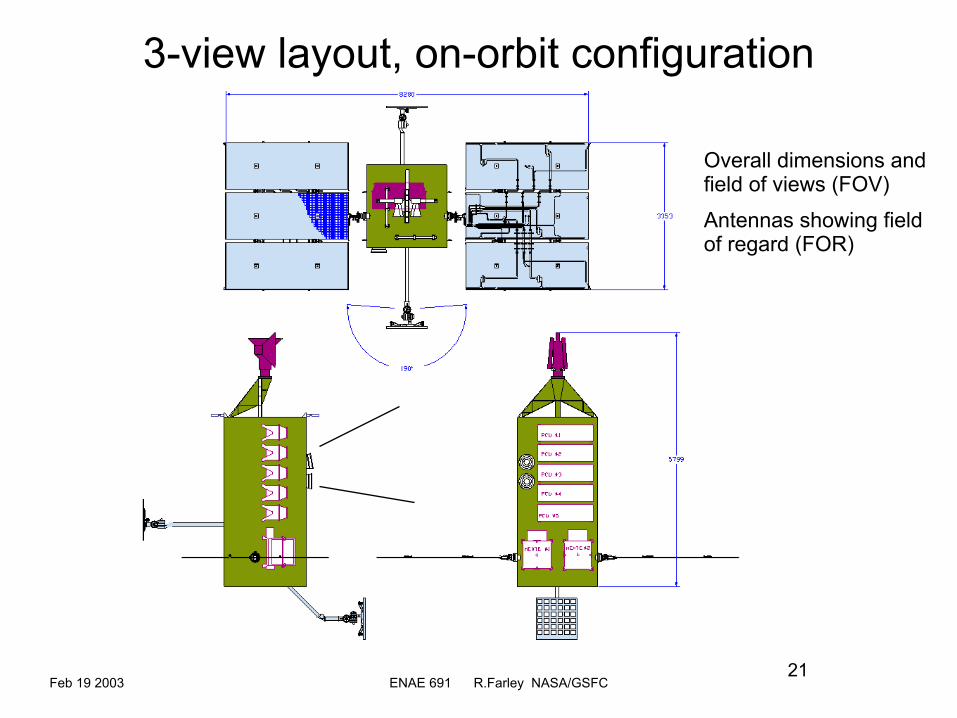
3-view layout, on-orbit configuration
Overall dimensions and field of views (FOV)
Antennas showing field of regard (FOR)

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC22
3-view layout, launch configuration
Make note of protrusions into payload envelope
Omni antennasHigh gain antenna, stowed
Star trackers PAF
Solar array panels array drive
Torquer bars

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC23
Spacecraft Drawing in Launch Vehicle
XTE in Delta II 10’ fairingFairing access port for the batteries
Pre-launch electrical access “red-tag” item
Launch Vehicle electrical interface

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC24
Drawing of deployment phase
EOS aqua
Pantograph deployment mechanism

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC25
Launch Vehicle Interfaces and VolumesPayload Fairings

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC26
Payload Envelope
If frequency requirements are not met, or for protrusions outside the designated envelope, Coupled Loads Analysis (CLA) are required to qualify the design, in cooperation with the LV engineers.
For many vehicles, if the spacecraft meets minimum lateral frequency requirements, then the envelope accounts for payload and fairing dynamic motions.

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC27
Launch Vehicle Payload Adapters
6019 3-point adapter 6915 4-point adapter
“V-band” clamp, or “Marmon” clamp-band
Clamp-band
Shear Lip

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC28
Structural MaterialsMaterial ρ
(kg/m3)E (GPa)
Fty(MPa)
E/ρ Fty/ρ α(µm/m K˚)
κ(W/m K˚)
Aluminum6061-T67075-T651
28002700
6871
276503
2426
98.6186.3
23.623.4
167130
MagnesiumAZ31B 1700 45 220 26 129.4 26 79
Titanium6Al-4V 4400 110 825 25 187.5 9 7.5
BerylliumS 65 AS R 200E
2000-
304-
207345
151-
103.5-
11.5-
170
FerrousINVAR 36AM 350304L annealed
4130 steel
8082770078007833
150200193200
62010341701123
18.5262525
76.7134.321.8143
1.6611.917.212.5
1440-601648
Heat resistantNon-magneticA286Inconel 600Inconel 718
794484148220
200206203
5852061034
252425
73.624.5125.7
16.4-23.0
12-12
Metallic Guide

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC29
Materials Guide Definitionsρ mass density
E Young’s modulus
Fty material allowable yield strength Note: Pa = Pascal = N/m2
E / ρ specific stiffness, the ratio of stiffness to density
Fty / ρ specific strength, the ratio of strength to density
α coefficient of thermal expansion CTE
κ coefficient of thermal conductivity
Material Usage Conclusions: USE ALUMINUM WHEN YOU CAN!!!Aluminum 7075 and Titanium 6Al-4V have the greatest strength to mass ratio
Beryllium has the greatest stiffness to mass ratio and high damping
4130 Steel has the greatest yield strength
INVAR has the lowest coefficient of thermal expansion, but difficult to process
Titanium has the lowest thermal conductivity, good for metallic isolators
(expensive, toxic to machine, brittle)

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC30
Metallic Materials Usage Guide
High strength to weight, good machining, low cost and available
High strength to weight, low CTE, low thermal conductivity, good at high temperatures
High stiffness, strength, low cost, weldable
High stiffness, strength at high temperatures, oxidation resistance and non-magnetic
Very high stiffness to weight, low CTE
Aluminum
Titanium
Steel
Heat-resistant Steel
Beryllium
Poor galling resistance, high CTE
Expensive, difficult to machine
Heavy, magnetic, oxidizes if not stainless steel. Stainless galls easily
Heavy, difficult to machine
Expensive, brittle, toxic to machine
Truss structure, skins, stringers, brackets, face sheets
Attach fittings for composites, thermal isolators, flexures
Fasteners, threaded parts, bearings and gears
Fasteners, high temperature parts
Mirrors, stiffness critical parts
Advantages Disadvantages Applications
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC31
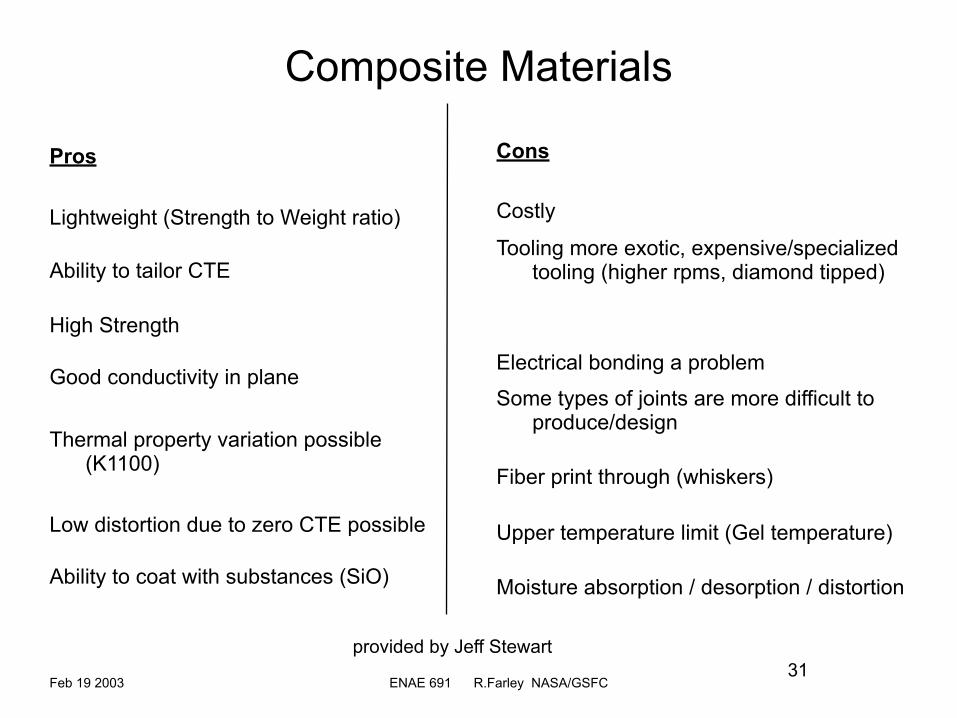
Composite Materials
Pros
Lightweight (Strength to Weight ratio)
Ability to tailor CTE
High Strength
Good conductivity in plane
Thermal property variation possible (K1100)
Low distortion due to zero CTE possible
Ability to coat with substances (SiO)
Cons
Costly
Tooling more exotic, expensive/specialized tooling (higher rpms, diamond tipped)
Electrical bonding a problem
Some types of joints are more difficult to produce/design
Fiber print through (whiskers)
Upper temperature limit (Gel temperature)
Moisture absorption / desorption / distortion
provided by Jeff Stewart

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC32
Composite Material PropertiesGraphite Fiber Reinforced Plastic (GFRP) density ~ 1800 kg/m3
If aluminum foil layers are added to create a quasi-isotropic zero coefficient of thermal expansion (CTE < 0.1 x10-6 per Co) then density ~ 2225 kg/m3
Aluminum foil layers are used to reduce mechanical shrinkage due to de-sorption / outgassing of water from the fibers and matrix (adhesive,ie. epoxy)
NOTE! A single pin hole in the aluminum foil will allow water de-sorption and shrinkage. This strategy is not one to trust…
Cynate esters are less hydroscopic than epoxies
Shrinkage of a graphite-epoxy optical metering structure due to de-sorption may be described as an asymptotic exponential (HST data):
Shrinkage ~ 27 (1 – e - 0.00113D) microns per meter of length, where D is the number of days in orbit.

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC33
Subsystem Mass Estimation TechniquesPreliminary Design Estimates for Instrument Mass
Approximate instrument mass densities, kg / m3
Spectrometers ~ 250
Mass spectrometers ~ 800
Synthetic aperture radar ~ 32
Rain radars ~ 150 thickness / diameter ~ 0.2
Cameras ~ 500
Small instruments ~ 1000
Scaling Laws: If a smaller instrument exists as a model, then if SF is the linear dimension scale factor…
Area proportional to SF2 Mass proportional to SF3
Area inertia proportional to SF4 Mass inertia proportional to SF5
BEWARE THE SQUARE-CUBE LAW! STRESS WILL INCREASE WITH SF!
Frequency proportional to 1/ SF Stress proportional to SF

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC34
Typical List of Boxes, Bus ComponentsACS
Reaction wheels Torquer bars Nutation damper Star trackers Inertial reference unit Earth scanner Digital sun sensor Coarse sun sensor Magnetometer ACE electrical box
Communication
S-band omni antenna S-band transponder X-band omni antenna X-band transmitter Parabolic dish reflector 2-axis gimbal Gimbal electronics Diplexers, RF switches Band reject filters Coaxial cable
Power
Batteries Solar array panels Articulation mechanisms Articulation electronics Array diode box Shunt dissipaters Power Supply Elec. Battery a/c ducting
Mechanical
Primary structure Deployment mechanisms Fittings, brackets, struts, equipment decks, cowling, hardware Payload Adapter Fitting
Propulsion
Propulsion tanks Pressurant tanks Thrusters Pressure sensors Filters Fill / drain valve Isolator valves Tubing
Thermal
Radiators Louvers Heat pipes Blankets Heaters Heat straps Sun shield Cryogenic pumps Cryostats
Electrical
C&DH box Wire harness
Instrument electronics
Instrument harness

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC35
Mass Estimation, mass fractionsSome Typical Mass Fractions for Preliminary Design
Payload Structure Power Electricalharness
ACS Thermal C&DH Comm Propulsion, dry
LEOnadir(GPM)
37 % 24 % 13 %Fixedarrays
7 % 6 % 4 % 1 % 3 % 5 %26 % w/fuel
LEOstellar(COBE)
52 % 14 % 12 %spins at 1 rpm
8 % 8 % 2 % 3 % 1 % 0 %
GEOnadir(DSP 15)
37 % 22 % 20 %spins at6 rpm
7 % 6 % 0.5 % 2 % 2 % 2 %
Mass fractions as percentage of total spacecraft observatory mass, less fuel
COBE with 52% payload fraction is unusually high and not representative
ACS is Attitude Control System, C&DH is Command and Data Handling, Comm is Communication subsystem

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC36
Mass Estimation, RefinementsThe largest contributors to mass are (neglecting the instrument payload)
Structural subsystem (primary, secondary)
Propulsion fuel mass, if required
Power subsystem
The following slides will show the ‘cheat-sheet’ for making preliminary estimates on some of these subsystems
Remember to target a mass margin of ~20% when compared to the throw weight of the launch vehicle and payload adapter capability. There must be room for growth, because evolving from the cartoon to the hardware, it always grows!

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC37
Mass Estimation with Mass RatiosMpayload/MDry ~ 0.4 for a first guess
MDry = Mpayload / (Mpayload/MDry) first cut estimate on total dry mass
Calculate total orbital average power required Poa as function of bus mass and payload requirements
Calculate MPower, and solar array area leading to a calculation on drag area
Calculate MFuel, and MPropDry with original MDry and drag area as guide
New Estimate of total dry mass:
MDry = Mpayload + MPower + MPropDry
+ MDry (MStruc/MDry + MElec/MDry + MCDH/MDry + MACS/MDry + MComm/MDry)
Iterate several times to achieve Total Dry Mass
Taking typical values: MDry = Mpayload + MPower + MPropDry +0.45MDry
MWet = MDry + MFuel Total wet mass, observatory launch mass
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC38
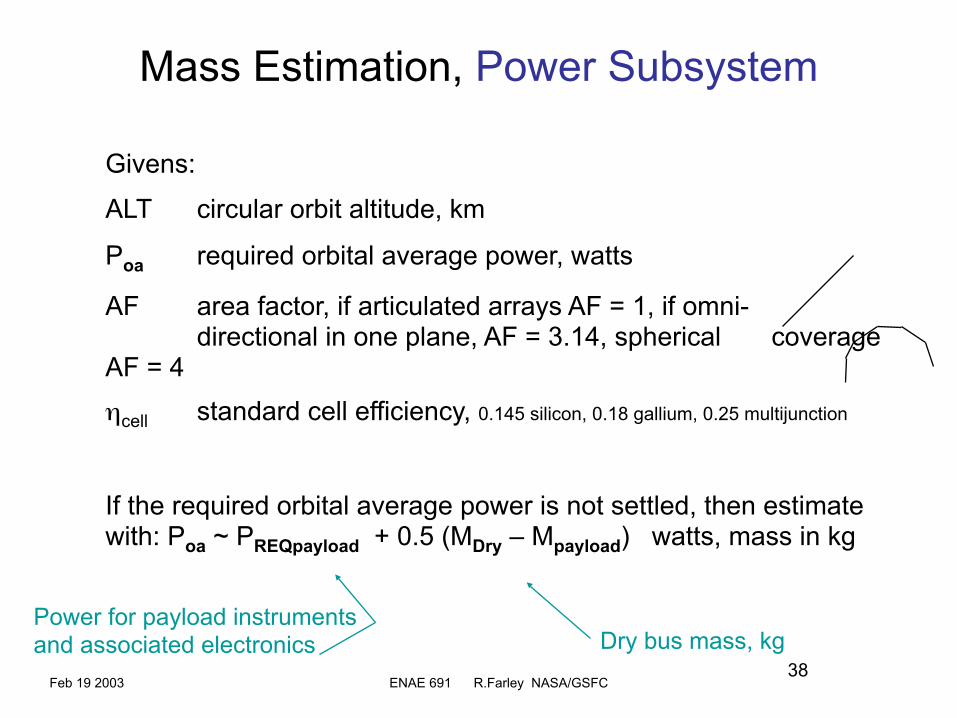
Mass Estimation, Power Subsystem
Givens:
ALT circular orbit altitude, km
Poa required orbital average power, watts
AF area factor, if articulated arrays AF = 1, if omni- directional in one plane, AF = 3.14, spherical coverage AF = 4ηcell standard cell efficiency, 0.145 silicon, 0.18 gallium, 0.25 multijunction
If the required orbital average power is not settled, then estimate with: Poa ~ PREQpayload + 0.5 (MDry – Mpayload) watts, mass in kg
Dry bus mass, kgPower for payload instruments and associated electronics

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC39
Mass Estimation, Power Subsystem
Total solar array panel area considering energy balance going thru eclipse and geometric area factors, m2
Maximum eclipse-to-daylight time ratio, estimate good for 300<ALT<1000
Required solar array projected area normal to sun, m2
Physical panel area, m2

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC40
Mass Estimation, Power SubsystemMass of cells, insulation, wires, terminal boards:
Melec ~ 3.8 x ASA for multi-junction cells kg
Melec ~ 3.4 x ASA for silicon cells kg
Mass of honeycomb substrates:
Msubstrates ~ 2.5 x ASA for aluminum panels kg
Msubstrates ~ 2.0 x ASA for composite panels kg
Mass of solar array panels, electrical and structure:
MPANELS = Melec + Msubstrates kg
Since multi junction cells usually go on composite substrates, and silicon cells went on aluminum substrates, it all comes out in the wash:
MPANELS ~ 5.85 x ASA kg
93% packing efficiency

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC41
Mass Estimation, Power Subsystem
Mbattery = 0.06 Poa Battery mass, kg Ni-Cads
MPSE = 0.04 Poa Power systems electronics, kg
MSAD = 0.33 Mpanels Solar array drives and electronics, kg
MSAdeploy = 0.27 Mpanels Solar array retention and deployment mechanisms, kg
MPower = Mpanels + MSAD + MSAdeploy + Mbattery + MPSE
Total power subsystem mass estimate, kg
(this can vary greatly due to the peak power input and charging profile allowed. ‘High noon’ power input can be enormous sometimes, depending on orbit inclination and drag reduction techniques)
Tracking array

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC42
Mass Estimation, Propulsion Subsystem
Givens:
Isp fuel specific thrust, seconds (227 for hydrazine, 307 bi-prop)ΔV deltaV required for maneuvers during the mission, m/s
TM mission time in orbit, years
YSM years since last solar maximum, 0 to 11 years
AP projected area in the velocity direction, orbital average, m2
ALT circular orbit flight altitude, km
Mdry total spacecraft observatory mass, dry of fuel, kg
Solar array orbital average projected drag area for a tracking solar array that feathers during eclipse

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC43
Mass Estimation, Propulsion Subsystem
If the mission requires altitude control, this is the approximate fuel mass for drag over the mission life
Note: g = 9.81 m/s2
Densitymax = 4.18 x 10-9 x e(-0.0136 ALT)
DF = 1 – 0.9 sin [π x YSM / 11]
Densityatm = DF x Densitymax
Approximate maximum atmospheric density at the altitude ALT (km), kg / m3
good for 300 < ALT < 700 km
Density factor, influenced by the 11 year solar maximum cycle (sin() argument in radians)
Corrected atmospheric density, kg / m3
Circular orbit velocity, m/s
Drag force, Newtons
Fuel mass for drag make-up, kg

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC44
Mass Estimation, Propulsion SubsystemFuel mass for maneuvering
If maneuvers are conducted at the beginning of the mission (attaining proper orbit):
If the fuel is to be saved for a de-orbit maneuver:
Or expressed as a ratio:

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC45
Mass Estimation, Propulsion SubsystemApproximate ΔV to de-orbit to a 50km perigee:
From 400km circular ~ 100 m/s
From 500km circular ~ 130 m/s
From 600km circular ~ 160 m/s
From 700km circular ~ 185 m/s
Remember, the dry mass estimate now includes the mass of the dry prop system components.
This means iterating with a better dry mass estimate for a better fuel calculation.
If the thrusters are too small for one large ΔV de-orbit maneuver, then 2-3 times the calculated fuel maybe required (TRMM experience)
Add 10% for ‘ullage’
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC46
Vibration Primmer
• A vibrating structure can be thought of as the superposition of many ‘mode’ shapes
• Each mode has a particular natural resonant frequency and distortion shape
• If the resonant frequencies are sufficiently separated, then the structural response can be estimated by treating each mode as a single-degree-of-freedom (sdof) system3 usual flavors of vibration:
Harmonic Random Impulsive

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC47
Harmonic (sinusoidal) Vibration, sdof
Hz
0.05 typical
Natural frequency of vibration
Recall:
2 π f = ω ‘Circular frequency’, radians / s

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC48
Harmonic Vibration, sdof con’t
Typical structural values for Q: 10 to 20
For small amplitude (jitter), or cryo temperatures: Q >100
Resonant Load Acceleration = input acceleration x Q
f is the applied input sinusoidal frequency, Hz
fn is the natural resonant frequency
Harmonic output acceleration = Harmonic input acceleration x T
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC49
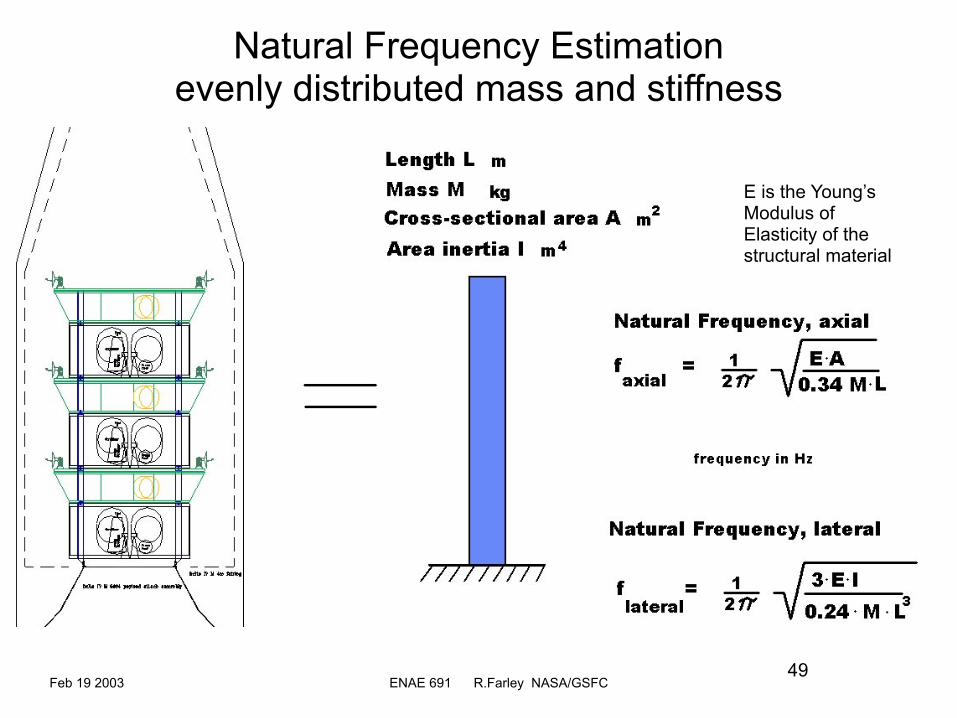
Natural Frequency Estimationevenly distributed mass and stiffness
E is the Young’s Modulus of Elasticity of the structural material

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC50
Natural Frequency Estimationdiscrete and distributed mass and stiffness
E is the Young’s Modulus of Elasticity of the structural material
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC51
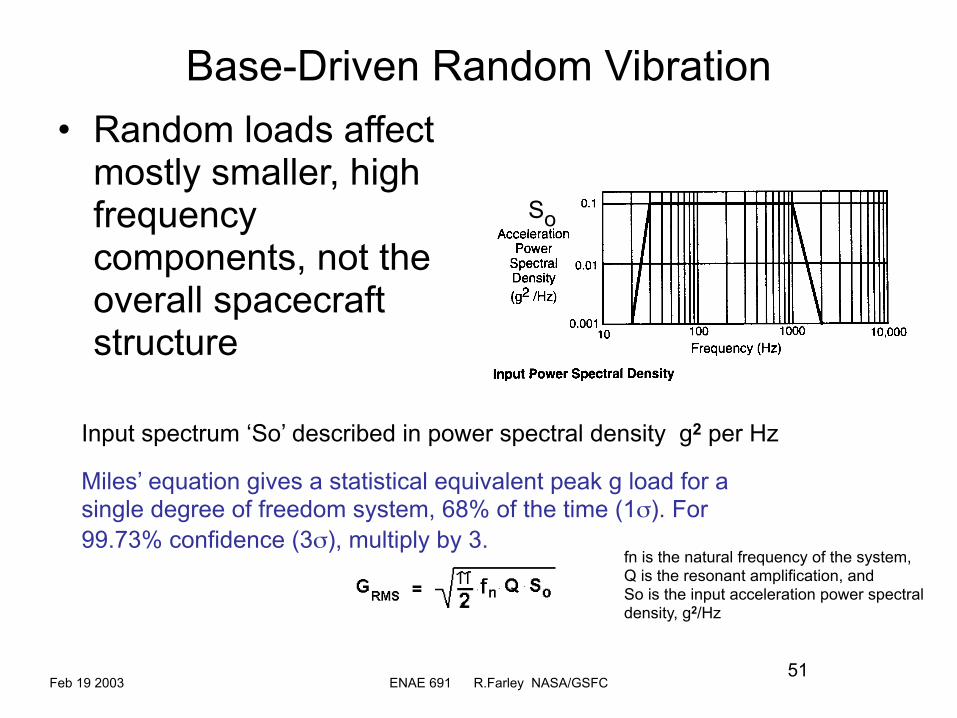
Base-Driven Random Vibration• Random loads affect
mostly smaller, high frequency components, not the overall spacecraft structure
Input spectrum ‘So’ described in power spectral density g2 per Hz
Miles’ equation gives a statistical equivalent peak g load for a single degree of freedom system, 68% of the time (1σ). For 99.73% confidence (3σ), multiply by 3.
fn is the natural frequency of the system, Q is the resonant amplification, and So is the input acceleration power spectral density, g2/Hz
So

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC52
Deployable Boom, equations for impact torque
Maximum Impact torque at lock-in, N-m
Hinge point “o”
Io Rotational mass inertia about point “o”, kg-m2
Dynamic system is critically damped
dθ/dt can just be the velocity at time of impact if not critically damped
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC53
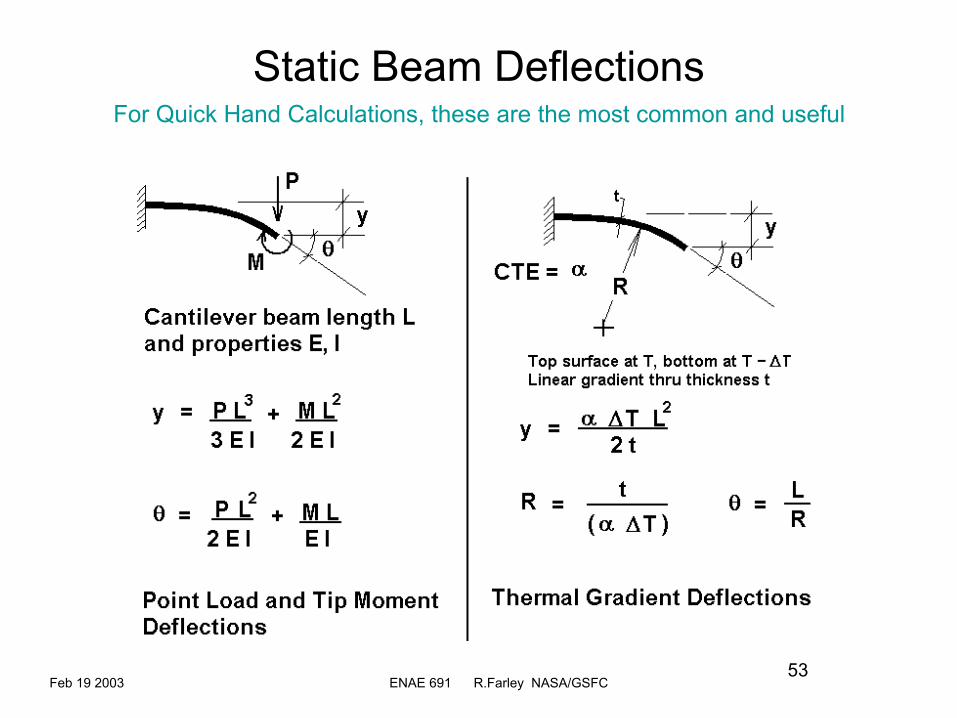
Static Beam DeflectionsFor Quick Hand Calculations, these are the most common and useful

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC54
Developing Limit Loads for Structural Design
• Quasi-Static loads– Linear and rotational accelerations + dynamicDynamic Loads included in Quasi-Static:– Harmonic vibration (sinusoidal)– Random vibration (mostly of acoustic origin)– Vibro-acoustic for light panels
• Shock loads• Thermal loads• Jitter
Don’t forget, there are payload mass vs. c.g. height limitations for the launch vehicle’s payload adapter fitting
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC55
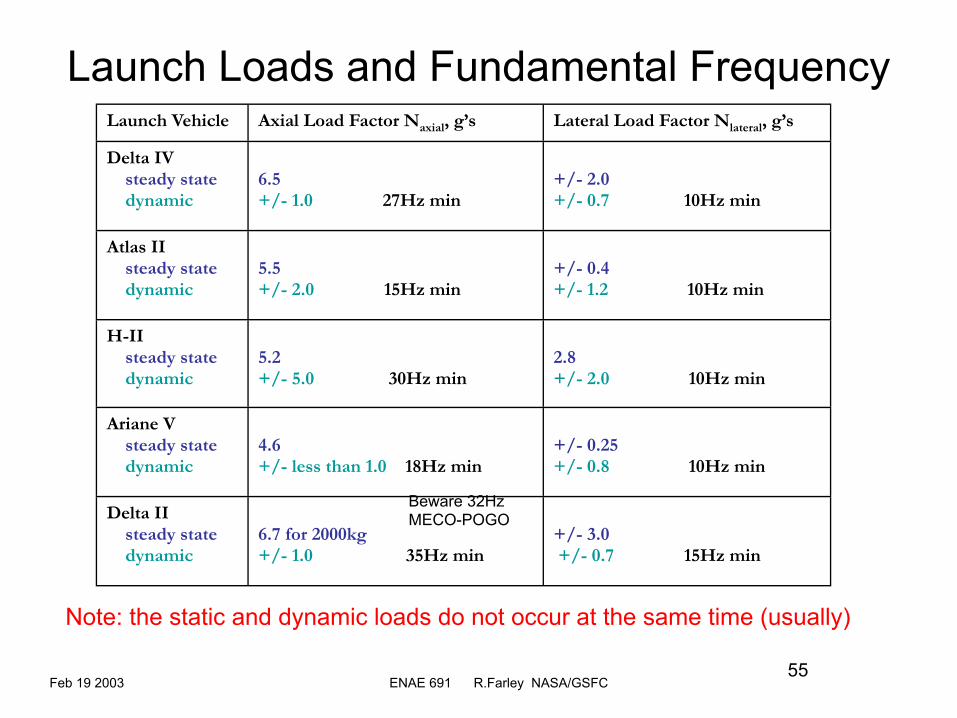
Launch Loads and Fundamental FrequencyLaunch Vehicle Axial Load Factor Naxial, g’s Lateral Load Factor Nlateral, g’s
Delta IV steady state dynamic
6.5+/- 1.0 27Hz min
+/- 2.0+/- 0.7 10Hz min
Atlas II steady state dynamic
5.5+/- 2.0 15Hz min
+/- 0.4+/- 1.2 10Hz min
H-II steady state dynamic
5.2+/- 5.0 30Hz min
2.8+/- 2.0 10Hz min
Ariane V steady state dynamic
4.6+/- less than 1.0 18Hz min
+/- 0.25+/- 0.8 10Hz min
Delta II steady state dynamic
6.7 for 2000kg+/- 1.0 35Hz min
+/- 3.0 +/- 0.7 15Hz min
Note: the static and dynamic loads do not occur at the same time (usually)
Beware 32Hz MECO-POGO
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC56
Rigid-body accelerations
• Linear force F = m x a = m x g x Nfactor
– N is the load factor in g’s– Low frequency sinusoidal below first natural
frequency will produce ‘near-static’ acceleration a = A x (2 π f)2 where f is the driving frequency and A
is the amplitude of sinusoidal motion• Rotational torque Q = I x alpha• Centrifugal force Fc = m x r x Ω2
x = A sin(ωt)
v = Aω cos(ωt)
a = -Aω2 sin(ωt)
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC57
Combining the loads to form ‘quasi-static’ levels
Limit Load = Static + dynamic + resonant + random
Note: The maximum values for each usually occur at different times in the launch environment, luckily.
The primary structure will have a different limit load than attached components.
Solar arrays and other low area-density exposed components will react to vibro-acoustic loads.
(low frequency)
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC58
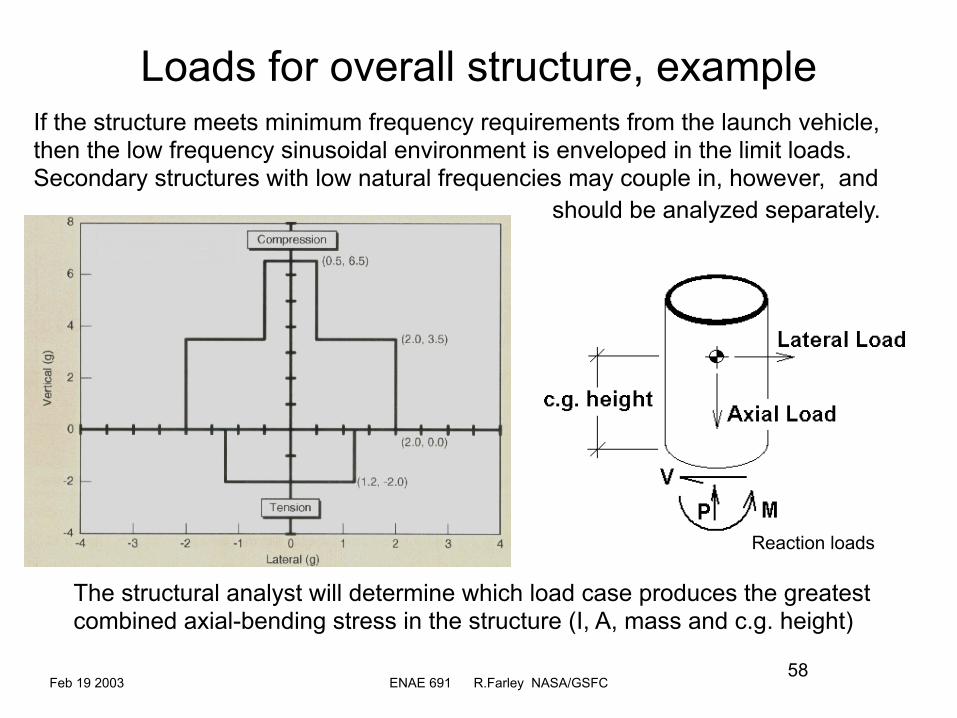
Loads for overall structure, exampleIf the structure meets minimum frequency requirements from the launch vehicle, then the low frequency sinusoidal environment is enveloped in the limit loads. Secondary structures with low natural frequencies may couple in, however, and
The structural analyst will determine which load case produces the greatest combined axial-bending stress in the structure (I, A, mass and c.g. height)
Reaction loads
should be analyzed separately.
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC59
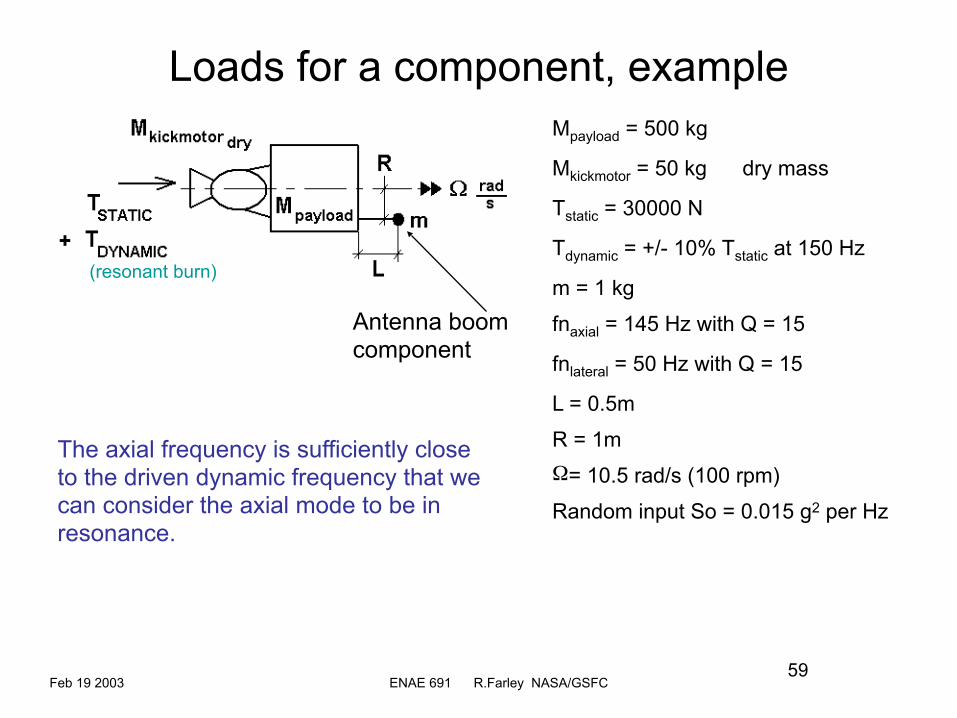
Loads for a component, exampleMpayload = 500 kg
Mkickmotor = 50 kg dry mass
Tstatic = 30000 N
Tdynamic = +/- 10% Tstatic at 150 Hz
m = 1 kg
fnaxial = 145 Hz with Q = 15
fnlateral = 50 Hz with Q = 15
L = 0.5m
R = 1mΩ= 10.5 rad/s (100 rpm)
Random input So = 0.015 g2 per Hz
Antenna boom component
The axial frequency is sufficiently close to the driven dynamic frequency that we can consider the axial mode to be in resonance.
(resonant burn)
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC60
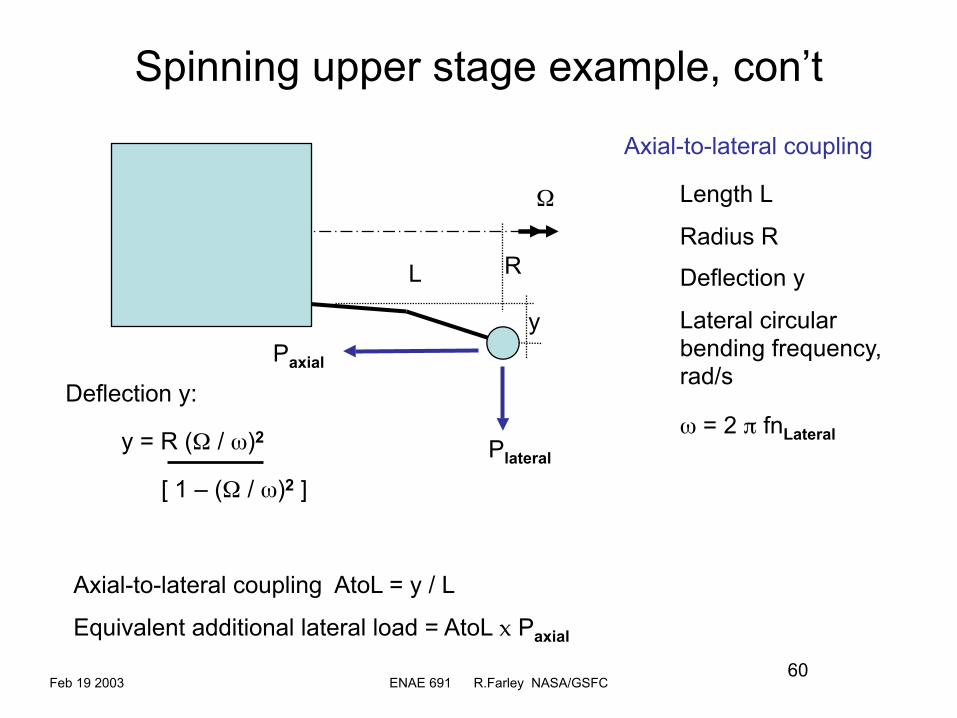
Spinning upper stage example, con’t
y
Axial-to-lateral coupling
Ω
ω = 2 π fnLateral
L R
Length L
Radius R
Deflection y
Lateral circular bending frequency, rad/s
y = R (Ω / ω)2
[ 1 – (Ω / ω)2 ]
Deflection y:
Paxial
Plateral
Axial-to-lateral coupling AtoL = y / L
Equivalent additional lateral load = AtoL x Paxial
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC61
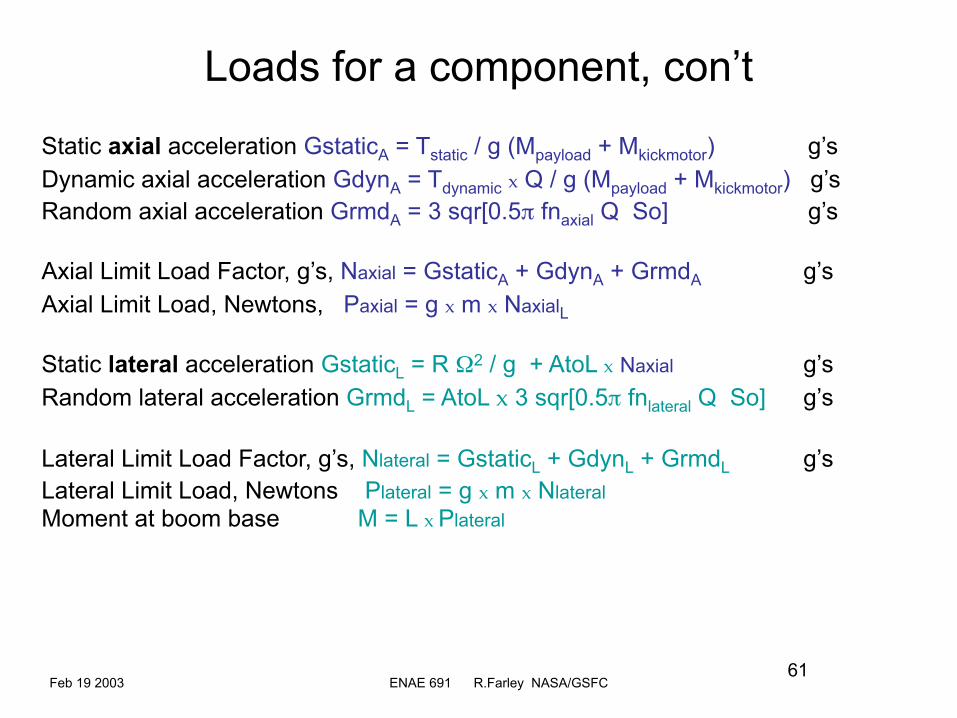
Loads for a component, con’t
Static axial acceleration GstaticA = Tstatic / g (Mpayload + Mkickmotor) g’sDynamic axial acceleration GdynA = Tdynamic x Q / g (Mpayload + Mkickmotor) g’sRandom axial acceleration GrmdA = 3 sqr[0.5π fnaxial Q So] g’s
Axial Limit Load Factor, g’s, Naxial = GstaticA + GdynA + GrmdA g’sAxial Limit Load, Newtons, Paxial = g x m x NaxialL
Static lateral acceleration GstaticL = R Ω2 / g + AtoL x Naxial g’sRandom lateral acceleration GrmdL = AtoL x 3 sqr[0.5π fnlateral Q So] g’s
Lateral Limit Load Factor, g’s, Nlateral = GstaticL + GdynL + GrmdL g’sLateral Limit Load, Newtons Plateral = g x m x NlateralMoment at boom base M = L x Plateral

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC62
Component Loads, Mass-Acceleration Curve
Applicable Launch Vehicles:
STS
Titan
Atlas
Delta
Ariane
H2
Proton
Scout
Simplified design curve for components on ‘appendage-like’ structures under 80 Hz fundamental frequency

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC63
Sizing the Primary Structure rigidity, strength and stability
Factors of safety NASA / INDUSTRY, metallic structures
Factors of safety Verification by Test Verification by Analysis
FS yield 1.25 / 1.10 2.0 / 1.6
FS ultimate 1.4 / 1.25 2.6 / 2.0
Factors of safety for buckling (stability) elements ~ FS buckling = 1.4
(stability very dependent on boundary conditions….so watch out!)
Feb 19 2003 ENAE 691 R.Farley NASA/GSFC64
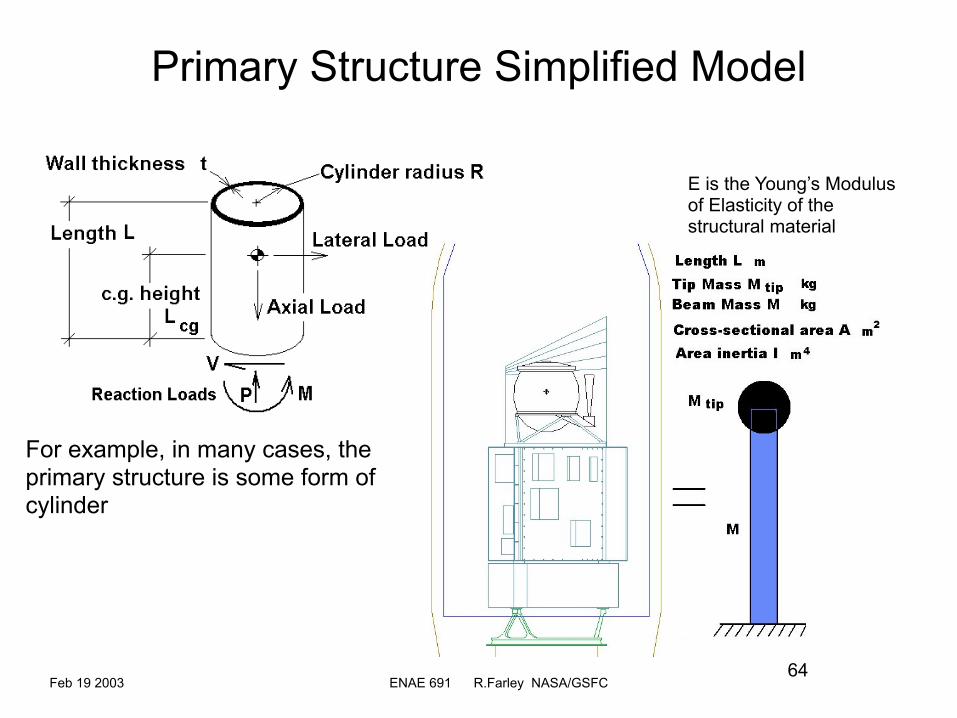
Primary Structure Simplified Model
For example, in many cases, the primary structure is some form of cylinder
E is the Young’s Modulus of Elasticity of the structural material

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC65
Sizing for rigidity (frequency)
Working the equations backwards….
When given frequency requirements from the launch vehicle users guide for 1st major axial frequency and 1st major lateral frequency, faxial, flateral:
Material modulus E times cross sectional area A
Material modulus E times bending inertia I
For a thin-walled cylinder:
I = π R3 t , or t = I / (π R3)
A = 2π R t or t = A / (2π R) Determine the driving requirement resulting in the thickest wall t. Recalculate A and I with the chosen t.
Select material for E, usually aluminum
e.g.: 7075-T6 E = 71 x 109 N/m2
Calculate for a 10% – 15% frequency marginTapering thickness will drop frequency 5% to 12%, but greatly reduce structural mass

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC66
Sizing for Strength
Plateraldes = (M + Mtip) g NlimitL Lateral Design Load
Paxialdes = (M + Mtip) g NlimitA Axial Design Load
Design Loads using limit loads and factors of safety
Recalling from mechanics of materials:
axial stress = P/A, bending stress = Mc/I (in a cylinder, the max shear and max compressive stress occur in different areas and so for preliminary design shear is not considered)
Max stress σmax = Paxialdes / A + (Plateraldes Lcg R) / I
Margin of safety MS = {σallowable / (FS x σmax)} – 1 0 < MS acceptable
For 7075-T6 aluminum, the yield allowable , σallowable = 503 x 106 N/m2
With less stress the higher up, the more tapered the structure can be, saving mass

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC67
Sizing for Structural StabilityDetermine the critical buckling stress for the cylinder
In the general case of a cone:
Allowable Critical Buckling Stress
Compare critical stress to the maximum stress as calculated in the previous slide. Update the max stress if a new thickness is required.
Margin of safety MS = {σCR /(FSbuckling x σmax)} – 1 0 < MS acceptable
Check top and bottom of cone: σmax, I, moment arm will be different Sheet and stringer construction will save ~ 25% mass

Feb 19 2003 ENAE 691 R.Farley NASA/GSFC68
Structural Subsystem MassFor all 3 cases of stiffness, strength, and stability, optimization calls for ‘tapering’ of the structure.
The frequency may drop between 5% to 12% with tapering
But the primary structural mass savings may be 25% to 35% - a good trade
Secondary structure (brackets, truss points, interfaces….) may equal or exceed the primary structure. An efficient structure, assume secondary structure = 1.0 x primary structure. A typical structure, assume 1.5.
So, if the mass calculated for the un-optimized constant-wall thickness cylinder (primary structure) is MCYL, then the typical structure (primary + secondary):
MSTRUCTURE ~ (2.0 to 3.5) x MCYL
This number can vary significantly