Embed Size (px)
Citation preview

TIME AVERAGE
Mean:
Mean-Square:
Variance:

ENSEMBLE AVERAGE
Mean:
Mean-square:
Variance:

ERGODICITYA random process is said to be
ergodic if time averaging is equal to ensemble average.
In a qualitative sense this implies that a single sample time signal of the process contains all possible statistical variations of the process.
Thus, no additional information is to be gained by observing an ensemble of sample signals over the information obtained from a one-sample signal.

Autocorrelation functionThe autocorrelation function for a random process X(t) is defined as
RX(t1,t2) = E[X(t1)X(t2)] where t1 and t2 are arbitrary
sampling times.Clearly it tells how well the process
is correlated with itself at two different times. If the process is stationary, its probability density functions are invariant with time, and the autocorrelation function depends only on the time difference
t2-t1. Thus Rx(Ť) = E[X(t)X(t + Ť)]
(stationary case)

Autocorrelation function is the
ensemble average of the product of X(t1) and X(t2), therefore it is formally written as
However the equation is often not the simplest way of determining Rx because the joint probability density function must be known explicitly in order to evaluate the integral. If the ergodic hypothesis applies, it is often easier to compute Rx as a time average rather than ensemble average. The following example will illustrate this :

Consider a time signal that is generated
according to the following rules (a)The waveform is generated with a
sample and hold arrangement where the hold interval is one second.
(b)The successive amplitudes are independent samples taken from a set of random numbers with uniform distribution from -1 to +1; and
(c)The first switching time after t=0 is a random variable with uniform distribution from 0 to 1
Here the process mean is 0 and its mean square value is 1/3. (obtained from (b))

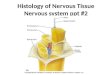
A typical sample signal for this
process is shown in fig. along with the same signal shifted in time an amount Ť.

It is obvious when Ť =0,the integral
is just the mean square value of Xa(t),which is 1/3 in this case. On the other hand, when Ť is unity or larger, there is no overlap of the correlated portions of Xa(t) and Xa(t+Ť), and thus the average of the product is 0. Now, as the shift Ť is reduced from 1 to 0, the overlap of correlated portions increases linearly until the maximum overlap occurs at Ť = 0. This then leads to the autocorrelation function

Note that for stationary ergodic
processes, the direction of time shift Ť is immaterial, and hence the autocorrelation function is symmetric about the origin. Also, note that we arrived at Rx(Ť) without formally finding the joint density function.
Sometimes, the random process under consideration is not ergodic, and it is necessary to distinguish between the usual autocorrelation function and time average version . Thus we define the time autocorrelation function as

To illustrate the difference between
the usual autocorrelation function and the time autocorrelation function, consider the deterministic process X(t) = Asin(wt)
where A is normal random variable with 0 mean and standard deviation σ and w is a known constant . Suppose we obtain a single sample of A and its numerical value is A1. The corresponding sample of X(t) would then be XA(t) = A1sin(wt). Its time autocorrelation would then be

On the other hand, the usual
autocorrelation function calculated as an ensemble average,
Clearly, time averaging does not yield the same result as ensemble averaging, so the process is not ergodic. Furthermore, the autocorrelation function does not reduce to simply a function of t2-t1. Therefore, the process is not stationary.

Cross correlation functionThe cross correlation between the
processes X(t) and Y(t) is defined as
Again, if the processes are stationary, only the time difference between sample points is relevant, so the cross correlation function reduces to
Just as the autocorrelation function tells us something about how a process is correlated with itself, the cross correlation function provides about the mutual correlation between the two process.

Notice that it is important to order the
subscripts properly in writing RXY(t). A skew symmetric relation exists for stationary processes as follows. By definition.
The expectation is invariant under a translation of –Ť. Thus RXY(Ť) is also given by
Now comparing both equations we see that
Thus interchanging the order of the subscripts of the function has the effect of changing the sign of the argument.













![Presentation1.ppt [recovered].ppt 2.pptk.pptl.pptgjgjgh](https://img.pdfslide.us/doc/110x75/58a0f9581a28abbf248b50e3/presentation1ppt-recoveredppt-2pptkpptlpptgjgjgh-58af62bae7537.jpg)