Embed Size (px)
Citation preview
Physics 235
Robotics Workshop
January 2007
Course Instructor: Tom Huber
2
Rules of Lego Sumo Mass of less than 900 grams (about 2 pounds) for the bot At start of the round, must be less than 7.5” across, but can be as tall as desired No projectiles or weapons meant to disable other bots
36” Diameter Sumo Ring
Bot will remain motionless for five seconds at start
Each round lasts 90 seconds or till a bot touches outside +1 point for winning bot, -1 for loser, 0 for tie Restart if bots are hopelessly pushing in circles
3
About The Class Class met five days per week, two hours per day with additional open lab time
First week – building and programming Parallax BOE Bots
Remainder of class, build Sumo Bots Build their structure from Lego bricks Write programs for the ZX24A processor Construct sensors
4
Special Thanks Max Hailperin and Mike Hvidsten
Previous instructors of this course
Office of Dean of Faculty Funding for purchasing the new robotics kits
Don Kinzer, President of Elba Corporation Donating ZBasic ZX24A processors
Scott Hagemeyer (Gustavus Class of 2007) Teaching assistant for this course
All of you for attending!
5
Anatomy of a Lego Bot Processor board with ZBasic ZX24A Processor Ultrasound Sensors (Distance) Infrared Sensors (Distance) Light Sensors (Edge of ring)
6
Comparison with Lego Mindstorms Mindstorms
Three inputs and three outputs Premade sensors (touch, light, rotation, etc.) Graphical programming language
ZBasic ZX24A Processor Sixteen ports – can be inputs or outputs Build your own sensors and wire interface Text-based programming language (Visual Basic)
7
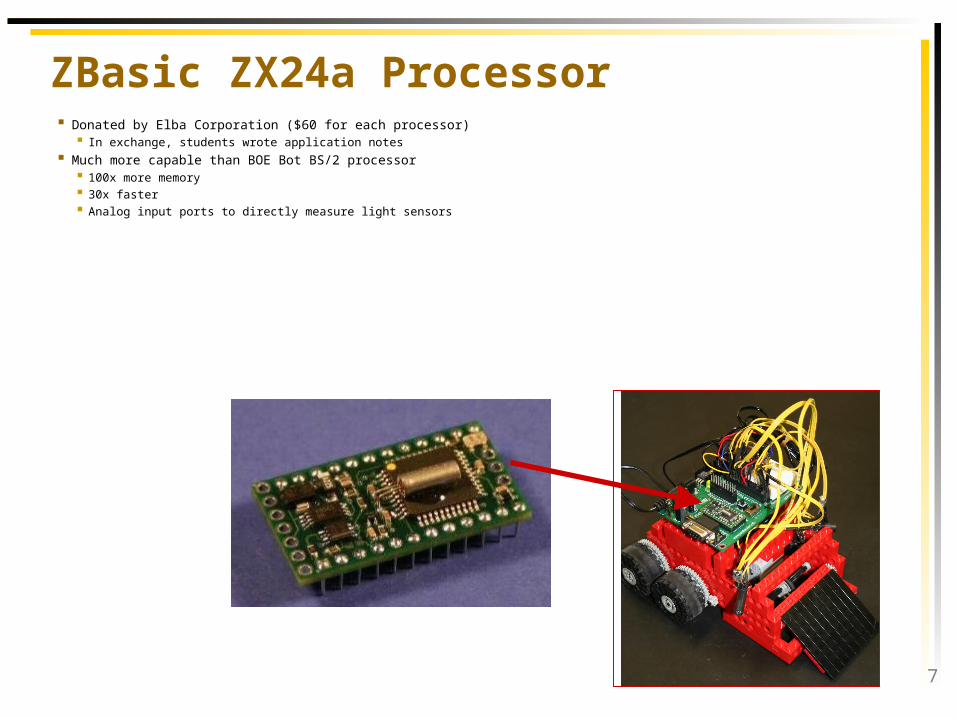
ZBasic ZX24a Processor Donated by Elba Corporation ($60 for each processor)
In exchange, students wrote application notes
Much more capable than BOE Bot BS/2 processor 100x more memory 30x faster Analog input ports to directly measure light sensors
8
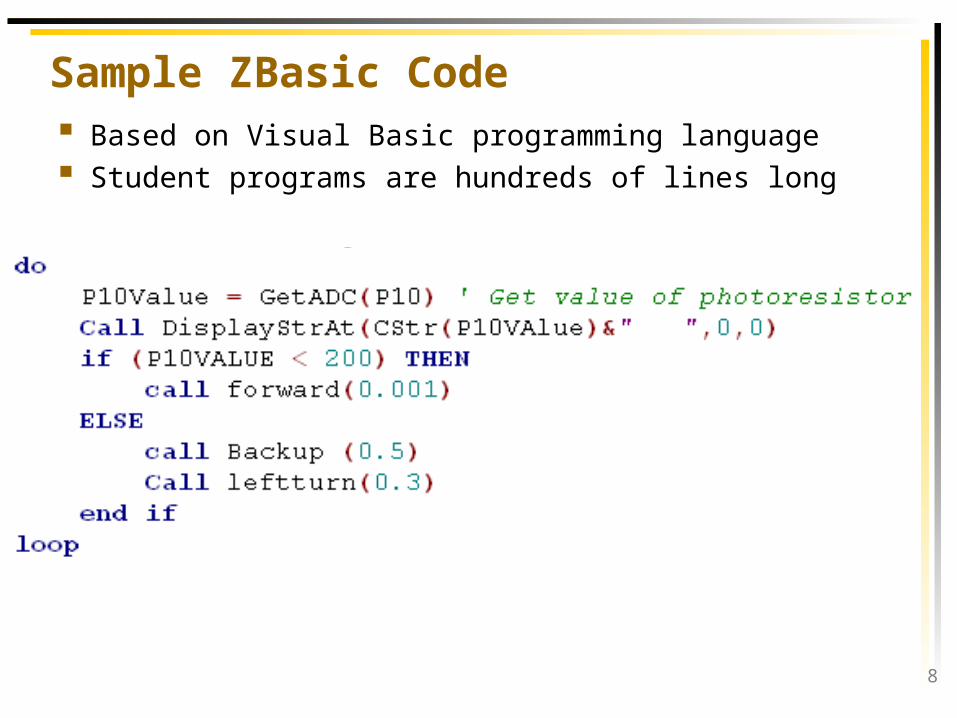
Sample ZBasic Code Based on Visual Basic programming language Student programs are hundreds of lines long
9
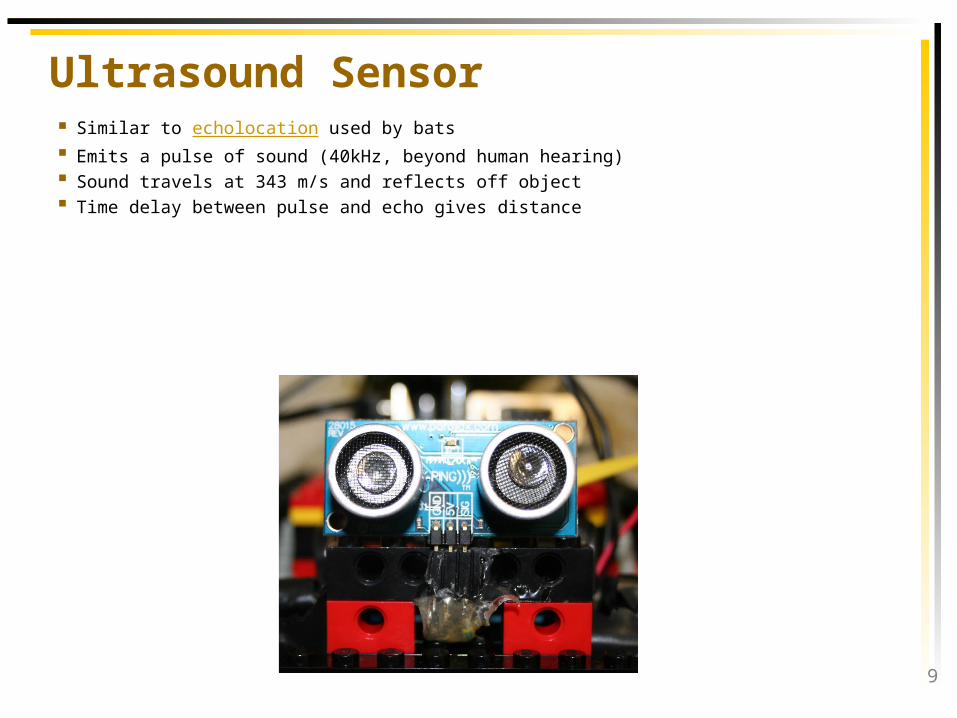
Ultrasound Sensor Similar to echolocation used by bats Emits a pulse of sound (40kHz, beyond human hearing) Sound travels at 343 m/s and reflects off object Time delay between pulse and echo gives distance
10
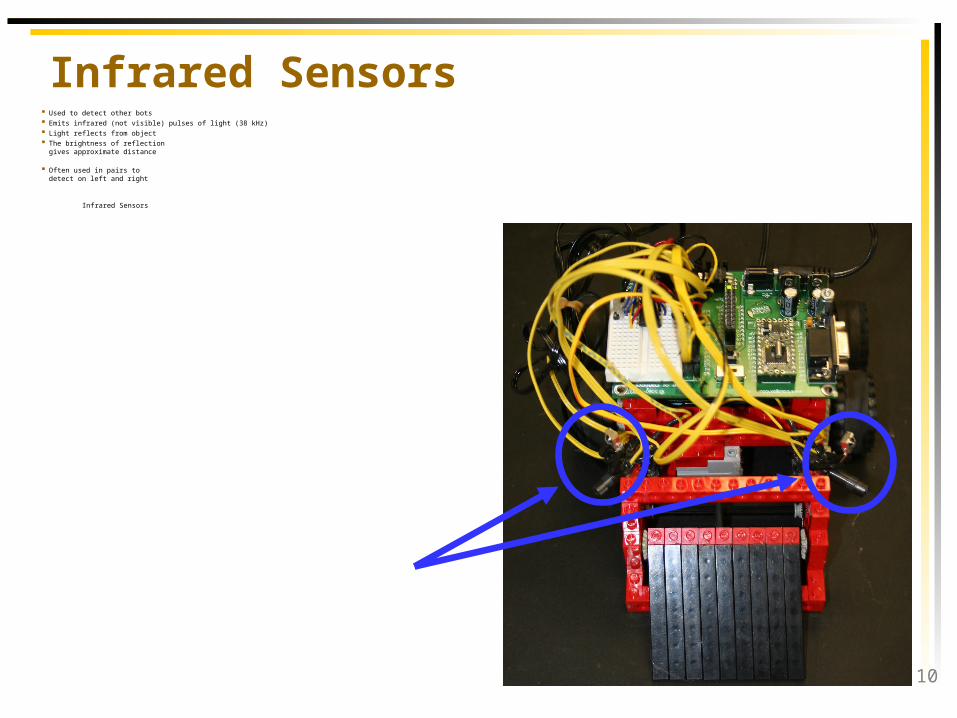
Infrared Sensors Used to detect other bots Emits infrared (not visible) pulses of light (38 kHz) Light reflects from object The brightness of reflection
gives approximate distance
Often used in pairs todetect on left and right
Infrared Sensors
11
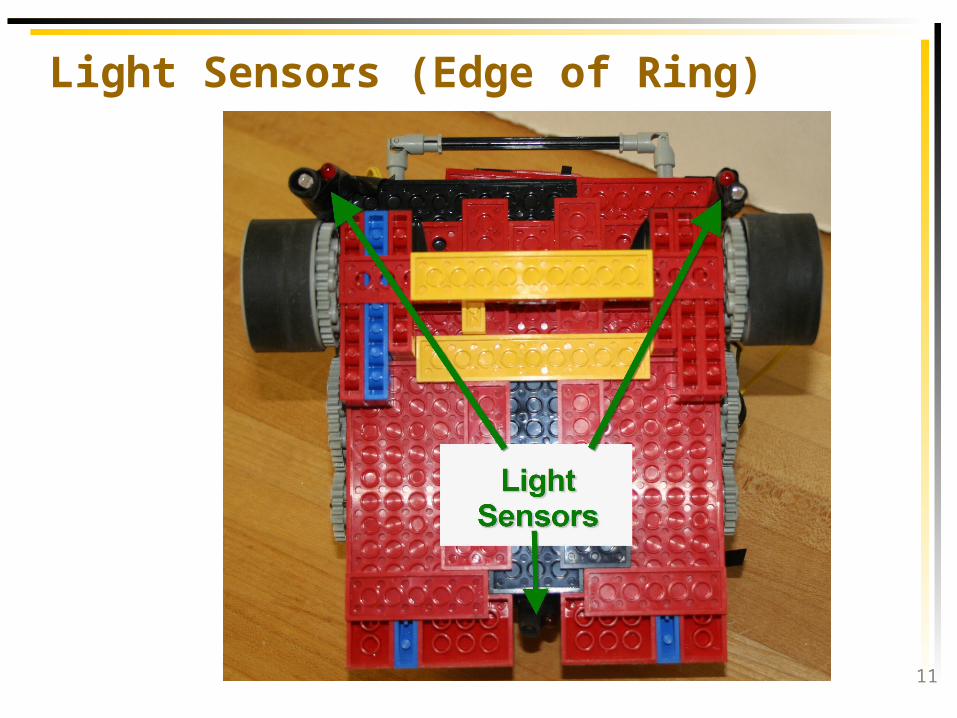
Light Sensors (Edge of Ring)









![SPM - live.parksystems.com · New Journal of Physics 12, 125020 (2010). [4] F. Huber et al., Science 366, 235 (2019). [5] J. Berwanger et al., Phys. Rev. Lett. 124, 096001 (2020)](https://img.pdfslide.us/doc/110x75/5eacf72c2b11175e334a993e/spm-live-new-journal-of-physics-12-125020-2010-4-f-huber-et-al-science.jpg)