Embed Size (px)
Citation preview

463 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Performance Evaluation of a Valveless Micropump Driven by a Ring-Type
Piezoelectric Actuator Tao Zhang Member IEEE and Qing-Ming Wang Member IEEE
AbstractmdashPresented in this paper is the study of the performance evaluation of a valveless micropump driven by a ring-type piezoelectric actuator The application of this micropump is to circulate fuel inside a miniaturized direct methanol fuel cell (DMFC) power system A theoretical model based on the theory of plates and shells is estabshylished to estimate the deflection and the volume change of this micropump without liquid loading Both finite-element method (FEM) and experimental method are applied to verify this model Using this model the optimal design pashyrameters such as the dimensions and the mechanical propshyerties of the micropump can be obtained Furthermore varshyious system parameters that will affect the performance of the micropump system with liquid loading are identified and analyzed experimentally It is expected that this study will provide some vital information for many micropump applications such as fuel delivery in fuel cells ink jet printshyers and biofluidics
I Introduction
The research on micropumps initially emerged at Stanshyford University in 1980 [1] Since then micropumps
have received a lot of attention and have played an imshyportant role in the development of microfluidics systems The applications of micropumps include chemical analysis systems microdosage systems ink jet printers and other microelectromechanical systems (MEMS) that require mishycroliquid handling During the last several decades varishyous designs of micropumps made of different materials and based on different pumping mechanisms have been preshysented An extensive review about different types of microshypumps was presented recently [2] Based on the pumping principle micropump also can be divided into two groups dynamic micropumps and displacement micropumps Disshyplacement micropumps can be further divided into reshyciprocating displacement aperiodic displacement and roshytary displacement micropumps Of all the micropumps reciprocating displacement micropumps that use movable boundary to push the working fluid periodically attract the most research attention In these micropumps the movable boundary is often a deformable platemdashthe pump diaphragmmdashwith fixed edges The pump diaphragm can be made of silicon glass plastic and metal Besides the pump diaphragm other basic components include a pump
Manuscript received March 23 2005 accepted August 16 2005 The authors are with the Department of Mechanical Engishy
neering University of Pittsburgh Pittsburgh PA 15261 (e-mail qmwangengrpittedu)
chamber an actuator mechanism or driver and flow dishyrecting elements (valves nozzlediffuser etc) In operashytion the actuator drives the pump diaphragm to increase and decrease the volume of the pump chamber periodishycally When the pump chamber is in expansion the fluid is drawn in When the pump chamber is in contraction the fluid is forced out The flow-directing elements are careshyfully designed and regulated so that a net flow from inlet to outlet can be obtained during one circle of expansion and contraction The micropump presented in this paper essentially accords with this description
The flow-directing elements are very important for the micropump operation and several different designs have been presented In earlier research passive check valves were often used [3] To eliminate the wear and fatigue of valves and reduce clogging some researchers have started to develop valveless designs The first piezoelectric valveshyless micropump was introduced in 1993 by Stemme and Stemme [4] Nozzlediffuse elements were used to rectify the flow direction in the pump design The opening anshygles of these nozzlediffuser elements were small normally less than 20 and the diffuser direction was the positiveshyflow direction The diameter of the pump chamber was 19 mm and the pumping frequency was of the order of 100 Hz Using water as working fluid the maximum flow rate was 16 mlminute and the maximum pressure head was 2 mH2O Olsson et al [5] continued the research on this micropump They presented a new design with two pump chambers connected in parallel in 1995 [5] and later fabricated it on silicon [6] [7] The performance of differshyent nozzlediffuser elements also was investigated [8] A lumped-mass model for this pump was established using MATLAB (The Mathworks Natick MA) [9] and a CFD model using ANSYSFlotran (ANSYS Inc Canonsburg PA) was applied to analyze the flow directing ability of nozzlediffuser elements [10] All of these works have been summarized in [11]
A different type of nozzlediffuser elements fabricated in silicon using anisotropic wet etching was presented in 1995 [12] [13] The opening angle of this later design was 705 and the positive flow direction was in the converging wall direction The pump diaphragm consisted of a Pyrex glass foil (Corning Inc Corning NY) with a thickness of 120 microm and a piezoelectric PZT disk actuator with a thickness of 200 microm The pump housing and the nozshyzlediffuser elements were fabricated on a silicon wafer A prototype with 7 times 7 mm pump diaphragm reached flow
c0885ndash3010$2000 copy 2006 IEEE
464 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 1 Schematic of the miniaturized DMFC power system using piezoelectric valveless micropump for fuel delivery
rates of 400 microlminute for water at an excitation frequency between 1 kHz and 10 kHz
In addition to nozzlediffuser elements another flowshydirecting element called a valvular conduit also was used in micropumps and it was reported that this design had higher volumetric efficiency than nozzlediffuser elements [14] A linearized dynamic system model was established to help improve the original design and a dramatic improveshyment was obtained [15] Morris and Forster also used the FEM to find the optimal geometric and material parameshyters for the circular piezoelectric micropump actuator [16]
A considerable amount of experimental and modeling research has been focused on the valveless micropump [17]ndash [25] All this research has provided very useful insights about the design and operation of valveless micropumps However due to the complicated phenomena involved with the vibration of pump actuator and the flow of working liqshyuid detailed studies are ongoing It is expected that imshyproved design and new applications will open many techshynological opportunities for micropumps especially those based on piezoelectric actuation mechanism
II Background
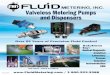
The micropump presented in this paper was originally designed to supply methanol fuel for a compact direct methanol fuel cell (DMFC) power system The cross secshytion of the DMFC power system incorporated with a piezoshyelectric micropump is shown schematically in Fig 1 Note that the figure is not drawn in actual scale This system mainly consists of the following parts fuel cell membrane electrode assembly (MEA) fuel chamber nozzlediffuser micropump and pump chamber and fuel supply manifold All these parts are fabricated in a multilayer structure to obtain a compact system The fuel cell MEA is made of a Nafionreg 117 (DuPont Wilmington DE) membrane layer sandwiched by two electrode layers with catalysts deposited on them And the micropump is fabricated by adhering a thin piezoelectric ring on a metal diaphragm When applying an alternating voltage to the piezoelectric ring the diaphragm is actuated to produce bending deforshymation that causes the volume change of the pump chamshyber By selecting appropriate shape and dimension of the nozzlediffuser between pump chamber and fuel chamber
Fig 2 Schematic of the piezoelectric ring-type bending actuator
the fuel can circulate in the desired direction And the fuel supply from the right chamber can compensate the fuel consumption According to the previous analysis [26] for a 1 W fuel cell assembly with an active electrochemishycal reaction area of 25 cm2 (5 cm times 5 cm) the least fuel flow rate required is about 031 mlminute if using a 1 M methanol water solution as fuel Many research issues for this system exist and the focus of this paper is the microshypump part The results that will be discussed later also can be applied to other systems with such a micropump
III Analytical Discussion
The key element of the valveless micropump is actually a ring-type piezoelectric bending mode actuator which as shown in Fig 2 consists of three layers PZT ring bonding layer and passive plate A theoretical model can be estabshylished to estimate the deflection of this actuator caused by either applying an electric field across the PZT ring or applying a mechanical pressure onto the diaphragm The schematic of the cross section of this pump actuator is shown in Fig 3 Because the whole pump actuator is bonded to the substrate it is assumed that the boundary is fixed However in real applications the bonding process is not perfect and the actual boundary should be between the fixed edge boundary and the simply supported boundshyary
Based on the theory of plates and shells an analytical model has been developed to determine the deflection of a disk-type piezoelectric bending mode actuator for the micropump [25] According to this model the distribution of the deflection along the radius direction can be obtained
w1(r) = [(2) (
2) ( a )]
2M0 b2 minus a a2 minus r + a a2 minus 2b2 ln minus b2
b [ ] 2 Dp (1 + vp) a2 + (1 minus vp) b2 + De (1 + ve) (b2 minus a2)
(0 le r le a) (1) w2(r) =
42M0a r2 minus 2b2 ln minus b2
b 2 Dp [(1 + vp) a2 + (1 minus vp) b2] + De (1 + ve) (b2 minus a2)
(a le r le b) (2)
465 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 3 Cross section of the piezoelectric ring-type bending actuator with clamped outer edge
Fig 4 Comparison of the diaphragm deflections under 100 V and 1 kPa separately
Here M0 is the moment caused by actuation of the PZT and can be calculated using the following equation
minusd31Uhpzt M0 = De
h 2 1 1 + (Dpzt + Dp) (3)
2+
h Epzthpzt Ephp
In (1) (2) (3) a and b represent the radius of the PZT disk and the passive plate respectively Dp vp Ep and hp are the flexural modulus Poissonrsquos ratio Youngrsquos modshyulus and thickness of the passive plate De ve and h are the equivalent flexural modulus the equivalent Poissonrsquos ratio and the total thickness of the two-layer structure Dpzt Epzt hpzt and d31 are the flexural modulus Youngrsquos modulus thickness and piezoelectric charge coefficient of the PZT U is the static voltage applied on the PZT
It should be noted that the actuation of a bimorph actushyator can cause both extension and bending For a bimorph beam if the length of the PZT layer is much larger than its thickness the extension is relatively small and can be neglected [27] In the general cases of bending actuators the thickness of the PZT is always much smaller than its length or radius therefore the extension is neglected In the model presented above and the following theoretical
Fig 5 Photo of the piezoelectric valveless micropump prototype
analysis the coupling to extension is not considered Anshyother simplification is to neglect the bonding layer effects on the actuator performance In a similar research on the circular PZT actuator [24] it is found that increasing the bonding will reduce the deflection but this effect is not significant when the PZTpassive layer thickness ratio is beyond 04 Furthermore as for the ring-type actuator preshysented in this paper the bonding layer thickness is very small Therefore it is reasonable to adopt this simplificashytion
Generally to derive an exact analytical solution for the bending deflection of the micropump diaphragm driven by a bonded ring-type piezoelectric actuator when a voltage is applied the governing equations need to be established and solved for three sections the inner passive section the middle three-layer actuator section (PZT layer bondshying layer and passive layer) and the outer passive secshytion Then the unknown parameters in the equations are determined by boundary conditions and continuity condishytions Thus the derivation can be a quite complex proshycess for such complicated problems numerical methods often are used to obtain the results Here for simplicity some assumptions are made so that an approximate anshyalytical model can be established based on the model of the disk-type bending actuator that is introduced above Assuming the whole system is linear and a thin ring-type piezoelectric actuator is used the bending deflection of the actuation membrane can be obtained approximately by subtracting the deflection of a smaller disk-type bending actuator from that of a larger disk-type bending actuator taking the inner radius of the PZT ring as the radius of the smaller PZT disk and the outer radius of the PZT ring as the radius of the larger PZT disk Therefore the equashytions for the ring-type bending actuator are (4)ndash(6) (see next page) where M0 is determined by (3) Ri and Ro are the inner and outer radius of the PZT ring and Rp is the radius of the passive plate The meanings of other paramshyeters are the same as those introduced in the equations for the disk-type bending actuator
466 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
( ) (2) Ro
M0 R2 minus R2 R2 minus r + R2 R2 minus 2R2 ln minus R2 p o o o o p pRp
w1(r) = [ ] ( )2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2
o p p o ( ) (2) Ri (4)
R2 minus R2 R2 minus r + R2 R2 minus 2R2 ln minus R2M0 p i i i i p pRpminus [ ] ( ) 2 Dp (1 + vp) Ri
2 + (1 minus vp) Rp2 + De (1 + ve) Rp
2 minus Ri 2
(0 le r le Ri)
( ) (2) Ro
M0 Rp 2 minus Ro
2 Ro 2 minus r + Ro
2 Ro 2 minus 2Rp
2 ln minus Rp2
Rpw2(r) = [ ] ( )
2 Dp (1 + vp) Ro 2 + (1 minus vp) Rp
2 + De (1 + ve) Rp 2 minus Ro
2
r (5) M0Ri
2 r2 minus 2Rp 2 ln minus Rp
2
Rpminus [ ] ( ) 2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2
i p p i
(Ri le r le Ra)
r M0R
2 r2 minus 2R2ω minus R2 o p Rp
p
w3(r) = [ ] ( )2 Dp (1 + vp) Ro
2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2 p p o
r (6) M0R
2 r2 minus 2R2 ln minus R2 i p pRpminus [ ] ( )
2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2 i p p i
(Ro le r le Rp)
Also based on the theory of plates and shells the deshyflection induced by mechanical pressure also can be detershymined by using the superposition method Combining the established equations from [28] together the deflections caused by pressure for the three different sections are
(2)
p Ri 2 minus r 5 + vp
R2 2 w4(r) = w5 (Ri) + i minus r64Dp 1 + vp
M1 ( 2)+ R2 minus r i2Dp (1 + vp) (7)
(0 le r le Ri)
(2)
p Ro 2 minus r 5 + ve 2 w5(r) = w6 (Ro) + R2 minus ro64De 1 + ve [ ] (
2)
R2M2 minus R2 (M1 minus M ) R2 minus ro i o+(R2 minus R22 (1 + ve) De )o i
r R2R2 (8) (M2 minus M1 + M ) log o i Rominus
(1 minus ve) De (R2 minus R2)o i
(Ri le r le Ro)
p ( 2)2 w6(r) = R2 minus rp64Dp
r(M minus M2) R2 r2 minus 2R2 log minus R2
o p pRp+ [ ] (9) 2Dp (1 minus vp) R2 + (1 + vp) R2 p o
(Ro le r le Rp)
where p is the mechanical pressure exerted onto the pump diaphragm M and M are two intermediate bending moshyments of which
p ( )M =
16(3 + ve) Ro
2 minus Ri 2 (10)
p [ ]M R2 ) minus R2= (1 + vp (3 + vp) (11)
16 p o
The other two intermediate bending moments M1 and M2 can be obtained by solving the continuity equations listed below ⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨
⎪ ⎪ ⎪ ⎪ ⎪ ⎩
dw4(r) dr
r=Ri
= dw5(r)
dr
r=Ri
dw5(r) dr
r=Ro
= dw6(r)
dr
r=Ro
(12)
Note that the continuity of the deflection is already satshyisfied in (7) (8) and (9)
467 zhang and wang valveless micropump and ring-type piezoelectric actuator
TABLE I Dimensions and Material Properties of Micropump Prototype
Piezoelectric disk Bonding layer Passive plate Parameters (PZT-5H)1 (conductive epoxy)2 (stainless steel)
Inner diameter (mm) 63 63 Outer diameter (mm) 1911 1911 254
Thickness (mm) 032 0056 0254 Youngrsquos modulus (Pa) 62 times 1010 517 times 109 195 times 1011
Poissonrsquos ratio 031 03 03 d31 (mV) minus32 times 10minus10
εT 33 (Fm) 2856 times 10minus8
1The properties data are taken from the data sheet of CTS 3203HD 2The properties data are taken from [24]
If the pressure difference exerted on the pump actuashytor is only in the range of several kilopascals the deflecshytion caused by the pressure difference will be very small Fig 4 shows the comparison between the deflection under 100 V of applied voltage and the deflection under 1 kPa of pressure difference for the ring-type bending actuator The dimensions and material properties of the pump actuator used for this calculation are listed in Table I Under such circumstance the effect of the pressure difference on the volume change can be neglected and an analytical solution can be obtained for the flow rate
After the deflection of the pump actuator is determined the following equation can be used to calculate the total volume change of the pump chamber Rp
∆V = 2π w(r)rdr (13) 0
Note here ⎧ ⎪ ⎨ w1(r) 0 le r le Ri w(r) = w2(r) Ri le r le Ro (14) ⎪ ⎩
w3(r) Ro le r le Rp
Substituting the deflection equations into it the relashytionship between the volume change and the actuation voltage can be obtained It can be shown that the volume change is proportional to the actuation voltage which can be expressed as
∆V = kU U (15)
The proportional coefficient depends on the dimension and the material properties of the pump actuator The equation to calculate this coefficient is not listed here due to its complexity But it can be obtained simply by calcushylating the volume change caused by 1 V of applied voltage When the voltage applied across the PZT layer is fixed a larger kU results in a larger volume change So it can be used as a figure-of-merit in evaluation of the piezoelectric pump performance
To obtain a continuous flow an alternating voltage has to be applied to the pump-bending actuator If the driving frequency is far lower than the resonance frequency of the pump actuator U can be substituted by Um sin(ωt) in the
Fig 6 Comparison of the diaphragm deflections obtained by different methods (U = 100 V)
equations derived previously Um is the amplitude of the sinusoidal voltage applied on the piezoelectric plate and ω is the angular frequency
To estimate the net flow rate of the pump the modelshying of the nozzlediffuser also is necessary As mentioned before these nozzlediffuser elements can direct flow from inlet to outlet They are geometrically designed to have a lower pressure loss in one direction than in the opposite direction for the same flow velocity The characteristic of the nozzlediffuser element can be described as follows
∆p =1 ρv2ξ (16)
2
where ∆p is the pressure loss through the nozzlediffuser element ρ is the density of the fluid v is the velocity of the fluid and ξ is the pressure loss coefficient It also can be expressed in the form of flow rate Q
Q = C ∆p (17)
where C is called conductivity coefficient Two different flow directions correspond to two different C values One is higher than the other The conductivity coefficient in a positive direction is represented by CH and the conducshytivity coefficient in a negative direction is represented by
468 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 7 Relationship between the proportional coefficient kU and the passive plate Youngrsquos modulus Ep
CL Accordingly there also are two different ξ values the pressure loss coefficient in positive direction is represented by ξpositive and the pressure loss coefficient in negative direction is represented by ξnegative
As mentioned before it is assumed that the effect of the pressure difference on the volume change is negligible and thus only the volume change induced by applied voltage is considered Also assume that the pressures outside the inlet and outlet are all equal to the atmospheric pressure Given these assumptions the equations from [21] can be used to obtain the analytical solutions for the flow rate
The average net flow rate then is given by
1 kU Umω CH minus CL kU Umω η 2 minus 1
Q = = 1π CH + CL π η 2 + 1 (18)
where 2
ξnegative CHη = =
ξpositive CL
For the miniaturized DMFC power system using a micropump the power to drive the micropump comes from the total power generated by the fuel cell system itself Therefore it is very important to estimate how much enshyergy the micropump needs to consume Electrically the bending-piezoelectric actuator behaves like a planar capacshyitor The electric capacitance under the given mechanical boundary condition is very complicated In a similar case [29] the capacitance of a circular disk-type PZT actuator with clamped edges has been given by
εT 233πa2
Ce = 1 minus 1 minus hpzt 1 minus v( )2
E )23 s11 sphp2hpzt (hp + hpzt
K2 (19) 31ShB31
Fig 8 Coefficient kU (solid curves from top to bottom RiRo = 01 02 03 and 04) and kU
2 C0 (dashed curves from top to bottom RiRo = 01 02 03 and 04) at different PZTpassive plate radius ratio
where εT E is the 33 is the permittivity of the PZT disk s11 elastic compliance of the PZT disk at constant electric field sp is the elastic compliance of the passive layer K31
is the electromechanical coupling coefficient of the PZT disk and v is the Poissonrsquos ratio In [29] it is assumed that the Poissonrsquos ratio of the PZT disk is the same as that of the passive plate and the effect of the bonding layer on the capacitance is neglected The equations for the other
Etwo parameters are Sh = hpztsp + hps11 and 2 E EB31 = hpzt
4 sp + 4s11sphphpzt 3 + 6s11sphp
2hpzt 2 ( )2E E+ 4s11sph
3 phpzt + h4
p s11
The term outside the parenthesis of (19) is actually the capacitance of piezoelectric layer with free boundary condition It is found that the capacitance with clampedshyboundary condition is about 10 to 30 less than the capacshyitance with free-boundary condition Although the boundshyary condition of the pump actuator in this study is not exactly the same as that of [29] the results of two cases should be close For approximation the capacitance with free-boundary condition is used here because the resultant estimation of the pump power consumption will be larger which should be safer for the system design The capacishytance with free-boundary condition is described as
Permittivity times Area C0 = (20)
Thickness
For the ring-type bending actuator ( )εT R2 minus R2 33π o iC0 = (21)
hpzt
Suppose the applied voltage is sinusoidal that is
U(t) = Um sin(ωt) (22)
The current then is dU(t)
i(t) = C0 (23) dt
469 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 9 Coefficient kU and k2 C0 at different passive plate radius U with fixed PZTpassive plate radius ratio
So the instantaneous power consumption is given by
Welec = i(t)U(t) = 1 ωC0U
2 sin(2ωt) (24) m2
It should be noted that as a capacitor the piezoelectric actuator would store a large portion of the input electrishycal energy therefore only part of the input energy can be converted into output mechanical energy for fuel delivery The stored energy will remain in the driving circuit and will be used in the next driving cycle For the worst case the maximum value of Welec is chosen to estimate the efshyficiency of the whole fuel cell system Combining (18) and (24) by eliminating Um we have
πCo η12 + 1 2
2 max Welec = Q (25)
4k2 f η12 minus 1U
where f is the frequency of the driving voltage As shown in (25) the maximum power consumption is
proportional to the capacitance C0 and the square of the average net flow rate Q It also is inversely proportional to the driving frequency f and the square of kU The effect of the nozzlediffuser element is represented by the coefshyficient η The larger this coefficient is the less the power consumption is Q and f are operational parameters C0
and kU depend on the dimensions and material properties of the pump actuator In the following analysis k2 C0 isU considered as a figure-of-merit that can be used to evaluate the performance of the micropump The larger this paramshyeter is the smaller the power consumed by the micropump will be For the miniaturized DMFC power system driven by the micropump it is also very important to keep this micropump power consumption as small as possible while delivering enough fuel flow rate for fuel cell reaction
IV Optimization of Design Parameters Based on Theoretical Analysis
Both the passive layer and the active layer of the microshypump can be made of various materials Also the thickness
Fig 10 Coefficient kU and k2 C0 at different PZT layer thickness U
and the radius of each layer may be different It is possible to optimize the micropump design based on the theoretishycal analysis Two objectives can be used for optimization One is the average net flow rate If the driving voltage and its frequency are fixed based on (18) a larger kU is preferred so that a larger flow rate can be obtained The other objective is the power consumption It is shown in (25) that given the driving frequency and the flow rate a larger k2 C0 is preferred so that the power required to U drive the micropump is smaller Both factors will be evalshyuated in the following analysis
It is necessary to verify the analytical solutions as many assumptions and simplifications have been made during the derivation Here both numerical and experimental reshysults are used to compare with the theoretical results for the ring-type bending actuator The numerical results are obtained by using the commercial FEM package (ANSYS 61 ANSYS Inc) to calculate a wedge-shaped part of the pump actuator with fixing and symmetric boundary conshyditions A three-dimensional (3-D) tetrahedral structural solid element type Solid-92 is chosen to model the passhysive plate and a 3-D tetrahedral coupled-field solid eleshyment type Solid-98 is chosen to model the PZT layer The bonding layer also is neglected The total number of the elements in this model is 2753 The experimental data are measured from a ring-type bending actuator The photo of the micropump prototype driving by this actuator is shown in Fig 5 The material properties and dimensions of this prototype are listed in Table I The applied voltage is 100 V
The comparison of the deflection data obtained by three different methods is shown in Fig 6 For both numerical results and experimental results the maximum deflection appears at the center of the pump actuator Theoretical results are closer to the experimental results however the maximum deflection does not appear at the center This probably means the linear approximation during the theoshyretical derivation does not fit well with the real case Also note that due to the imperfect clamping at the outer edge of the actuator diaphragm the experimental results do not converge to zero at the boundary There are other possible
470 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 11 Coefficient and 2 kU k C0 at different passivePZT U layer thickness ratio with fixed PZT layer thickness
reasons that result in the discrepancy among the results obtained by three different methods As mentioned before the numerical model is using a 3-D structural solid element so stresses and strains in other directions also are conshysidered The theoretical model is based on pure bending assumption and linearization simplification is used The factors that may affect the experimental results are even more complicated including the fabrication defects residshyual stress materials imperfection etc Still from Fig 6 it is shown that both numerical and theoretical methods can provide fair estimations
Based on the theoretical model Figs 7ndash11 are obtained to illustrate the possible factors that can affect the perforshymance of the micropump
Fig 7 shows how the material property of the passive plate can affect the performance of the ring-type bending actuator Increasing the Youngrsquos modulus of the passive plate will reduce kU Therefore it is preferable to choose a passive plate with smaller Youngrsquos modulus so that a larger flow rate can be obtained In addition because there is no connection between the capacitance and the Youngrsquos modulus the variation trend of k2 C0 should be the same U as that of kU
In Fig 8 the solid curves represent kU (from top to botshytom RiRo = 01 02 03 and 04) and the dot curves repshyresent k2 C0 (from top to bottom RiRo = 01 02 03 U and 04) So it is obvious that increasing the innerouter radius ratio of the PZT ring will reduce both kU and k2 C0 Increasing Ri will reduce the capacitance how-U ever it also will reduce the deflection at the same time As a whole k2 C0 is decreasing when Ri is increasing U Also an optimal PZTpassive plate radius ratio exists for both kU and k2 C0 The optimal ratio for kU (about 08) U is larger than the optimal ratio for k2 C0 (about 07) be-U cause a larger PZT ring radius results in a larger capacshyitance Keeping both the innerouter radius ratio of the PZT ring and the PZTpassive plate radius ratio fixed the curves of both kU and k2 C0 as a function of the U passive plate radius can be obtained As shown in Fig 9
increasing the radius of the passive plate will increase both kU and k2 C0U
The effect of the thicknesses on the performance of the pump actuator is depicted in Figs 10 and 11 The optimal thickness of the PZT ring exists for both kU and k2 C0U Because a smaller PZT ring thickness leads to a larger capacitance the value of the optimal PZT ring thickness for k2 C0 (about 025 mm) is larger than the value of the U optimal thickness for kU (about 01 mm) By keeping the thickness of the PZT ring fixed it also can be found that the optimal PZTpassive plate thickness ratio exists for both kU and k2 C0 Because the thickness of the passive U plate will not affect the capacitance the values of both optimal thickness ratios are the same and about 03 in this case
V Experimental Characterization
As mentioned earlier a micropump prototype driving by the ring-type bending actuator has been fabricated in our lab Not all of the design parameters of the prototype are optimal due to the limitations of the experimental conshyditions and the available materials To fabricate the thin PZT ring first a PZT ring with a thickness of 08 mm is cut from a thicker PZT ring using the dicing saw then this PZT ring is ground to the specific thickness After that the top and bottom surfaces of the PZT ring are coated with a thin gold electrode layer using a sputter-coater device The thin stainless steel disk is bought from McMaster-Carr Supply Company Elmhurst IL The PZT ring is bonded onto the stainless steel disk using epoxy Two very thin bare copper wires are connected to the two electrodes of this ring-type bonding actuator using conductive epoxy The pump housing is made of hard transparent plastic material By bonding the ring-type bending actuator onto the pump housing with epoxy the valveless piezoelectric micropump is finally obtained Fig 12 shows the top and cross section of the pump housing
An MTI 2000 Fotonic Sensor (MTI Instruments Inc Albany NY) is used to measure the deflection of the proshytotype As shown in Fig 13 the relationship between the center deflection of the prototype (without liquid loading) and the applied voltage is almost linear This linear reshylationship also is predicted by the theoretical analysis alshythough a certain difference exists between the values of the experimental results and those of the theoretical results Basically increasing the applied voltage will increase the applied electrical field therefore the deflection and the volume displacement will increase as well However the applied electrical field cannot exceed a certain limit or the PZT material will be depolarized This limit of the PZT-5H used in our prototype is about 8 kVcm and for a PZT ring with a thickness of 03 mm the maximum applied voltage should be about 240 V Higher driving voltage also means a larger power consumption The comparison of the deflection distributions along the radius obtained by difshyferent methods is already shown in Fig 6 In general all
471 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 12 Design graph of the micropump housing
Fig 13 Measured center deflection of the micropump diaphragm under different applied voltage (without liquid loading)
the deflection curves show the similar variation trend and the theoretical result is closer to the experimental result quantitatively
The other important factor that can influence the pershyformance of the pump is the driving frequency For the case without liquid loading two methods are used to meashysure the frequency response of the pump actuator One is to measure the center deflection under different driving frequency and the other is to measure the impedance specshytroscopy of this actuator For comparison the numerical results also are obtained by using the commercial FEM package ANSYS 61 As shown in Fig 14 the first resoshynant frequency appears at several kilohertz in which the deflection reaches the maximum value Both resonant freshyquencies obtained by experimental methods are very close and the numerical one is much higher
Fig 14 Frequency response of the micropump obtained by different methods (without liquid loading)
As shown in Fig 15 for the case with water loading the relationship between the center deflection and the applied voltage is also linear In this measurement the applied voltage is sinusoidal and the driving frequency is 200 Hz When applying a sinusoidal alternating current (AC) voltshyage to the actuator the measured deflection signal is also sinusoidal with the same frequency as the driving voltage And a phase shift is observed between the deflection and the applied voltage that may be partly attributed to the hysteresis In Fig 15 only the amplitude of the deflection is shown The frequency responses of the micropump with water loading also are evaluated by both center deflection and impedance spectroscopy From Fig 16 it is found that the results obtained by both methods are very close and
472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

464 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 1 Schematic of the miniaturized DMFC power system using piezoelectric valveless micropump for fuel delivery
rates of 400 microlminute for water at an excitation frequency between 1 kHz and 10 kHz
In addition to nozzlediffuser elements another flowshydirecting element called a valvular conduit also was used in micropumps and it was reported that this design had higher volumetric efficiency than nozzlediffuser elements [14] A linearized dynamic system model was established to help improve the original design and a dramatic improveshyment was obtained [15] Morris and Forster also used the FEM to find the optimal geometric and material parameshyters for the circular piezoelectric micropump actuator [16]
A considerable amount of experimental and modeling research has been focused on the valveless micropump [17]ndash [25] All this research has provided very useful insights about the design and operation of valveless micropumps However due to the complicated phenomena involved with the vibration of pump actuator and the flow of working liqshyuid detailed studies are ongoing It is expected that imshyproved design and new applications will open many techshynological opportunities for micropumps especially those based on piezoelectric actuation mechanism
II Background
The micropump presented in this paper was originally designed to supply methanol fuel for a compact direct methanol fuel cell (DMFC) power system The cross secshytion of the DMFC power system incorporated with a piezoshyelectric micropump is shown schematically in Fig 1 Note that the figure is not drawn in actual scale This system mainly consists of the following parts fuel cell membrane electrode assembly (MEA) fuel chamber nozzlediffuser micropump and pump chamber and fuel supply manifold All these parts are fabricated in a multilayer structure to obtain a compact system The fuel cell MEA is made of a Nafionreg 117 (DuPont Wilmington DE) membrane layer sandwiched by two electrode layers with catalysts deposited on them And the micropump is fabricated by adhering a thin piezoelectric ring on a metal diaphragm When applying an alternating voltage to the piezoelectric ring the diaphragm is actuated to produce bending deforshymation that causes the volume change of the pump chamshyber By selecting appropriate shape and dimension of the nozzlediffuser between pump chamber and fuel chamber
Fig 2 Schematic of the piezoelectric ring-type bending actuator
the fuel can circulate in the desired direction And the fuel supply from the right chamber can compensate the fuel consumption According to the previous analysis [26] for a 1 W fuel cell assembly with an active electrochemishycal reaction area of 25 cm2 (5 cm times 5 cm) the least fuel flow rate required is about 031 mlminute if using a 1 M methanol water solution as fuel Many research issues for this system exist and the focus of this paper is the microshypump part The results that will be discussed later also can be applied to other systems with such a micropump
III Analytical Discussion
The key element of the valveless micropump is actually a ring-type piezoelectric bending mode actuator which as shown in Fig 2 consists of three layers PZT ring bonding layer and passive plate A theoretical model can be estabshylished to estimate the deflection of this actuator caused by either applying an electric field across the PZT ring or applying a mechanical pressure onto the diaphragm The schematic of the cross section of this pump actuator is shown in Fig 3 Because the whole pump actuator is bonded to the substrate it is assumed that the boundary is fixed However in real applications the bonding process is not perfect and the actual boundary should be between the fixed edge boundary and the simply supported boundshyary
Based on the theory of plates and shells an analytical model has been developed to determine the deflection of a disk-type piezoelectric bending mode actuator for the micropump [25] According to this model the distribution of the deflection along the radius direction can be obtained
w1(r) = [(2) (
2) ( a )]
2M0 b2 minus a a2 minus r + a a2 minus 2b2 ln minus b2
b [ ] 2 Dp (1 + vp) a2 + (1 minus vp) b2 + De (1 + ve) (b2 minus a2)
(0 le r le a) (1) w2(r) =
42M0a r2 minus 2b2 ln minus b2
b 2 Dp [(1 + vp) a2 + (1 minus vp) b2] + De (1 + ve) (b2 minus a2)
(a le r le b) (2)
465 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 3 Cross section of the piezoelectric ring-type bending actuator with clamped outer edge
Fig 4 Comparison of the diaphragm deflections under 100 V and 1 kPa separately
Here M0 is the moment caused by actuation of the PZT and can be calculated using the following equation
minusd31Uhpzt M0 = De
h 2 1 1 + (Dpzt + Dp) (3)
2+
h Epzthpzt Ephp
In (1) (2) (3) a and b represent the radius of the PZT disk and the passive plate respectively Dp vp Ep and hp are the flexural modulus Poissonrsquos ratio Youngrsquos modshyulus and thickness of the passive plate De ve and h are the equivalent flexural modulus the equivalent Poissonrsquos ratio and the total thickness of the two-layer structure Dpzt Epzt hpzt and d31 are the flexural modulus Youngrsquos modulus thickness and piezoelectric charge coefficient of the PZT U is the static voltage applied on the PZT
It should be noted that the actuation of a bimorph actushyator can cause both extension and bending For a bimorph beam if the length of the PZT layer is much larger than its thickness the extension is relatively small and can be neglected [27] In the general cases of bending actuators the thickness of the PZT is always much smaller than its length or radius therefore the extension is neglected In the model presented above and the following theoretical
Fig 5 Photo of the piezoelectric valveless micropump prototype
analysis the coupling to extension is not considered Anshyother simplification is to neglect the bonding layer effects on the actuator performance In a similar research on the circular PZT actuator [24] it is found that increasing the bonding will reduce the deflection but this effect is not significant when the PZTpassive layer thickness ratio is beyond 04 Furthermore as for the ring-type actuator preshysented in this paper the bonding layer thickness is very small Therefore it is reasonable to adopt this simplificashytion
Generally to derive an exact analytical solution for the bending deflection of the micropump diaphragm driven by a bonded ring-type piezoelectric actuator when a voltage is applied the governing equations need to be established and solved for three sections the inner passive section the middle three-layer actuator section (PZT layer bondshying layer and passive layer) and the outer passive secshytion Then the unknown parameters in the equations are determined by boundary conditions and continuity condishytions Thus the derivation can be a quite complex proshycess for such complicated problems numerical methods often are used to obtain the results Here for simplicity some assumptions are made so that an approximate anshyalytical model can be established based on the model of the disk-type bending actuator that is introduced above Assuming the whole system is linear and a thin ring-type piezoelectric actuator is used the bending deflection of the actuation membrane can be obtained approximately by subtracting the deflection of a smaller disk-type bending actuator from that of a larger disk-type bending actuator taking the inner radius of the PZT ring as the radius of the smaller PZT disk and the outer radius of the PZT ring as the radius of the larger PZT disk Therefore the equashytions for the ring-type bending actuator are (4)ndash(6) (see next page) where M0 is determined by (3) Ri and Ro are the inner and outer radius of the PZT ring and Rp is the radius of the passive plate The meanings of other paramshyeters are the same as those introduced in the equations for the disk-type bending actuator
466 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
( ) (2) Ro
M0 R2 minus R2 R2 minus r + R2 R2 minus 2R2 ln minus R2 p o o o o p pRp
w1(r) = [ ] ( )2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2
o p p o ( ) (2) Ri (4)
R2 minus R2 R2 minus r + R2 R2 minus 2R2 ln minus R2M0 p i i i i p pRpminus [ ] ( ) 2 Dp (1 + vp) Ri
2 + (1 minus vp) Rp2 + De (1 + ve) Rp
2 minus Ri 2
(0 le r le Ri)
( ) (2) Ro
M0 Rp 2 minus Ro
2 Ro 2 minus r + Ro
2 Ro 2 minus 2Rp
2 ln minus Rp2
Rpw2(r) = [ ] ( )
2 Dp (1 + vp) Ro 2 + (1 minus vp) Rp
2 + De (1 + ve) Rp 2 minus Ro
2
r (5) M0Ri
2 r2 minus 2Rp 2 ln minus Rp
2
Rpminus [ ] ( ) 2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2
i p p i
(Ri le r le Ra)
r M0R
2 r2 minus 2R2ω minus R2 o p Rp
p
w3(r) = [ ] ( )2 Dp (1 + vp) Ro
2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2 p p o
r (6) M0R
2 r2 minus 2R2 ln minus R2 i p pRpminus [ ] ( )
2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2 i p p i
(Ro le r le Rp)
Also based on the theory of plates and shells the deshyflection induced by mechanical pressure also can be detershymined by using the superposition method Combining the established equations from [28] together the deflections caused by pressure for the three different sections are
(2)
p Ri 2 minus r 5 + vp
R2 2 w4(r) = w5 (Ri) + i minus r64Dp 1 + vp
M1 ( 2)+ R2 minus r i2Dp (1 + vp) (7)
(0 le r le Ri)
(2)
p Ro 2 minus r 5 + ve 2 w5(r) = w6 (Ro) + R2 minus ro64De 1 + ve [ ] (
2)
R2M2 minus R2 (M1 minus M ) R2 minus ro i o+(R2 minus R22 (1 + ve) De )o i
r R2R2 (8) (M2 minus M1 + M ) log o i Rominus
(1 minus ve) De (R2 minus R2)o i
(Ri le r le Ro)
p ( 2)2 w6(r) = R2 minus rp64Dp
r(M minus M2) R2 r2 minus 2R2 log minus R2
o p pRp+ [ ] (9) 2Dp (1 minus vp) R2 + (1 + vp) R2 p o
(Ro le r le Rp)
where p is the mechanical pressure exerted onto the pump diaphragm M and M are two intermediate bending moshyments of which
p ( )M =
16(3 + ve) Ro
2 minus Ri 2 (10)
p [ ]M R2 ) minus R2= (1 + vp (3 + vp) (11)
16 p o
The other two intermediate bending moments M1 and M2 can be obtained by solving the continuity equations listed below ⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨
⎪ ⎪ ⎪ ⎪ ⎪ ⎩
dw4(r) dr
r=Ri
= dw5(r)
dr
r=Ri
dw5(r) dr
r=Ro
= dw6(r)
dr
r=Ro
(12)
Note that the continuity of the deflection is already satshyisfied in (7) (8) and (9)
467 zhang and wang valveless micropump and ring-type piezoelectric actuator
TABLE I Dimensions and Material Properties of Micropump Prototype
Piezoelectric disk Bonding layer Passive plate Parameters (PZT-5H)1 (conductive epoxy)2 (stainless steel)
Inner diameter (mm) 63 63 Outer diameter (mm) 1911 1911 254
Thickness (mm) 032 0056 0254 Youngrsquos modulus (Pa) 62 times 1010 517 times 109 195 times 1011
Poissonrsquos ratio 031 03 03 d31 (mV) minus32 times 10minus10
εT 33 (Fm) 2856 times 10minus8
1The properties data are taken from the data sheet of CTS 3203HD 2The properties data are taken from [24]
If the pressure difference exerted on the pump actuashytor is only in the range of several kilopascals the deflecshytion caused by the pressure difference will be very small Fig 4 shows the comparison between the deflection under 100 V of applied voltage and the deflection under 1 kPa of pressure difference for the ring-type bending actuator The dimensions and material properties of the pump actuator used for this calculation are listed in Table I Under such circumstance the effect of the pressure difference on the volume change can be neglected and an analytical solution can be obtained for the flow rate
After the deflection of the pump actuator is determined the following equation can be used to calculate the total volume change of the pump chamber Rp
∆V = 2π w(r)rdr (13) 0
Note here ⎧ ⎪ ⎨ w1(r) 0 le r le Ri w(r) = w2(r) Ri le r le Ro (14) ⎪ ⎩
w3(r) Ro le r le Rp
Substituting the deflection equations into it the relashytionship between the volume change and the actuation voltage can be obtained It can be shown that the volume change is proportional to the actuation voltage which can be expressed as
∆V = kU U (15)
The proportional coefficient depends on the dimension and the material properties of the pump actuator The equation to calculate this coefficient is not listed here due to its complexity But it can be obtained simply by calcushylating the volume change caused by 1 V of applied voltage When the voltage applied across the PZT layer is fixed a larger kU results in a larger volume change So it can be used as a figure-of-merit in evaluation of the piezoelectric pump performance
To obtain a continuous flow an alternating voltage has to be applied to the pump-bending actuator If the driving frequency is far lower than the resonance frequency of the pump actuator U can be substituted by Um sin(ωt) in the
Fig 6 Comparison of the diaphragm deflections obtained by different methods (U = 100 V)
equations derived previously Um is the amplitude of the sinusoidal voltage applied on the piezoelectric plate and ω is the angular frequency
To estimate the net flow rate of the pump the modelshying of the nozzlediffuser also is necessary As mentioned before these nozzlediffuser elements can direct flow from inlet to outlet They are geometrically designed to have a lower pressure loss in one direction than in the opposite direction for the same flow velocity The characteristic of the nozzlediffuser element can be described as follows
∆p =1 ρv2ξ (16)
2
where ∆p is the pressure loss through the nozzlediffuser element ρ is the density of the fluid v is the velocity of the fluid and ξ is the pressure loss coefficient It also can be expressed in the form of flow rate Q
Q = C ∆p (17)
where C is called conductivity coefficient Two different flow directions correspond to two different C values One is higher than the other The conductivity coefficient in a positive direction is represented by CH and the conducshytivity coefficient in a negative direction is represented by
468 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 7 Relationship between the proportional coefficient kU and the passive plate Youngrsquos modulus Ep
CL Accordingly there also are two different ξ values the pressure loss coefficient in positive direction is represented by ξpositive and the pressure loss coefficient in negative direction is represented by ξnegative
As mentioned before it is assumed that the effect of the pressure difference on the volume change is negligible and thus only the volume change induced by applied voltage is considered Also assume that the pressures outside the inlet and outlet are all equal to the atmospheric pressure Given these assumptions the equations from [21] can be used to obtain the analytical solutions for the flow rate
The average net flow rate then is given by
1 kU Umω CH minus CL kU Umω η 2 minus 1
Q = = 1π CH + CL π η 2 + 1 (18)
where 2
ξnegative CHη = =
ξpositive CL
For the miniaturized DMFC power system using a micropump the power to drive the micropump comes from the total power generated by the fuel cell system itself Therefore it is very important to estimate how much enshyergy the micropump needs to consume Electrically the bending-piezoelectric actuator behaves like a planar capacshyitor The electric capacitance under the given mechanical boundary condition is very complicated In a similar case [29] the capacitance of a circular disk-type PZT actuator with clamped edges has been given by
εT 233πa2
Ce = 1 minus 1 minus hpzt 1 minus v( )2
E )23 s11 sphp2hpzt (hp + hpzt
K2 (19) 31ShB31
Fig 8 Coefficient kU (solid curves from top to bottom RiRo = 01 02 03 and 04) and kU
2 C0 (dashed curves from top to bottom RiRo = 01 02 03 and 04) at different PZTpassive plate radius ratio
where εT E is the 33 is the permittivity of the PZT disk s11 elastic compliance of the PZT disk at constant electric field sp is the elastic compliance of the passive layer K31
is the electromechanical coupling coefficient of the PZT disk and v is the Poissonrsquos ratio In [29] it is assumed that the Poissonrsquos ratio of the PZT disk is the same as that of the passive plate and the effect of the bonding layer on the capacitance is neglected The equations for the other
Etwo parameters are Sh = hpztsp + hps11 and 2 E EB31 = hpzt
4 sp + 4s11sphphpzt 3 + 6s11sphp
2hpzt 2 ( )2E E+ 4s11sph
3 phpzt + h4
p s11
The term outside the parenthesis of (19) is actually the capacitance of piezoelectric layer with free boundary condition It is found that the capacitance with clampedshyboundary condition is about 10 to 30 less than the capacshyitance with free-boundary condition Although the boundshyary condition of the pump actuator in this study is not exactly the same as that of [29] the results of two cases should be close For approximation the capacitance with free-boundary condition is used here because the resultant estimation of the pump power consumption will be larger which should be safer for the system design The capacishytance with free-boundary condition is described as
Permittivity times Area C0 = (20)
Thickness
For the ring-type bending actuator ( )εT R2 minus R2 33π o iC0 = (21)
hpzt
Suppose the applied voltage is sinusoidal that is
U(t) = Um sin(ωt) (22)
The current then is dU(t)
i(t) = C0 (23) dt
469 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 9 Coefficient kU and k2 C0 at different passive plate radius U with fixed PZTpassive plate radius ratio
So the instantaneous power consumption is given by
Welec = i(t)U(t) = 1 ωC0U
2 sin(2ωt) (24) m2
It should be noted that as a capacitor the piezoelectric actuator would store a large portion of the input electrishycal energy therefore only part of the input energy can be converted into output mechanical energy for fuel delivery The stored energy will remain in the driving circuit and will be used in the next driving cycle For the worst case the maximum value of Welec is chosen to estimate the efshyficiency of the whole fuel cell system Combining (18) and (24) by eliminating Um we have
πCo η12 + 1 2
2 max Welec = Q (25)
4k2 f η12 minus 1U
where f is the frequency of the driving voltage As shown in (25) the maximum power consumption is
proportional to the capacitance C0 and the square of the average net flow rate Q It also is inversely proportional to the driving frequency f and the square of kU The effect of the nozzlediffuser element is represented by the coefshyficient η The larger this coefficient is the less the power consumption is Q and f are operational parameters C0
and kU depend on the dimensions and material properties of the pump actuator In the following analysis k2 C0 isU considered as a figure-of-merit that can be used to evaluate the performance of the micropump The larger this paramshyeter is the smaller the power consumed by the micropump will be For the miniaturized DMFC power system driven by the micropump it is also very important to keep this micropump power consumption as small as possible while delivering enough fuel flow rate for fuel cell reaction
IV Optimization of Design Parameters Based on Theoretical Analysis
Both the passive layer and the active layer of the microshypump can be made of various materials Also the thickness
Fig 10 Coefficient kU and k2 C0 at different PZT layer thickness U
and the radius of each layer may be different It is possible to optimize the micropump design based on the theoretishycal analysis Two objectives can be used for optimization One is the average net flow rate If the driving voltage and its frequency are fixed based on (18) a larger kU is preferred so that a larger flow rate can be obtained The other objective is the power consumption It is shown in (25) that given the driving frequency and the flow rate a larger k2 C0 is preferred so that the power required to U drive the micropump is smaller Both factors will be evalshyuated in the following analysis
It is necessary to verify the analytical solutions as many assumptions and simplifications have been made during the derivation Here both numerical and experimental reshysults are used to compare with the theoretical results for the ring-type bending actuator The numerical results are obtained by using the commercial FEM package (ANSYS 61 ANSYS Inc) to calculate a wedge-shaped part of the pump actuator with fixing and symmetric boundary conshyditions A three-dimensional (3-D) tetrahedral structural solid element type Solid-92 is chosen to model the passhysive plate and a 3-D tetrahedral coupled-field solid eleshyment type Solid-98 is chosen to model the PZT layer The bonding layer also is neglected The total number of the elements in this model is 2753 The experimental data are measured from a ring-type bending actuator The photo of the micropump prototype driving by this actuator is shown in Fig 5 The material properties and dimensions of this prototype are listed in Table I The applied voltage is 100 V
The comparison of the deflection data obtained by three different methods is shown in Fig 6 For both numerical results and experimental results the maximum deflection appears at the center of the pump actuator Theoretical results are closer to the experimental results however the maximum deflection does not appear at the center This probably means the linear approximation during the theoshyretical derivation does not fit well with the real case Also note that due to the imperfect clamping at the outer edge of the actuator diaphragm the experimental results do not converge to zero at the boundary There are other possible
470 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 11 Coefficient and 2 kU k C0 at different passivePZT U layer thickness ratio with fixed PZT layer thickness
reasons that result in the discrepancy among the results obtained by three different methods As mentioned before the numerical model is using a 3-D structural solid element so stresses and strains in other directions also are conshysidered The theoretical model is based on pure bending assumption and linearization simplification is used The factors that may affect the experimental results are even more complicated including the fabrication defects residshyual stress materials imperfection etc Still from Fig 6 it is shown that both numerical and theoretical methods can provide fair estimations
Based on the theoretical model Figs 7ndash11 are obtained to illustrate the possible factors that can affect the perforshymance of the micropump
Fig 7 shows how the material property of the passive plate can affect the performance of the ring-type bending actuator Increasing the Youngrsquos modulus of the passive plate will reduce kU Therefore it is preferable to choose a passive plate with smaller Youngrsquos modulus so that a larger flow rate can be obtained In addition because there is no connection between the capacitance and the Youngrsquos modulus the variation trend of k2 C0 should be the same U as that of kU
In Fig 8 the solid curves represent kU (from top to botshytom RiRo = 01 02 03 and 04) and the dot curves repshyresent k2 C0 (from top to bottom RiRo = 01 02 03 U and 04) So it is obvious that increasing the innerouter radius ratio of the PZT ring will reduce both kU and k2 C0 Increasing Ri will reduce the capacitance how-U ever it also will reduce the deflection at the same time As a whole k2 C0 is decreasing when Ri is increasing U Also an optimal PZTpassive plate radius ratio exists for both kU and k2 C0 The optimal ratio for kU (about 08) U is larger than the optimal ratio for k2 C0 (about 07) be-U cause a larger PZT ring radius results in a larger capacshyitance Keeping both the innerouter radius ratio of the PZT ring and the PZTpassive plate radius ratio fixed the curves of both kU and k2 C0 as a function of the U passive plate radius can be obtained As shown in Fig 9
increasing the radius of the passive plate will increase both kU and k2 C0U
The effect of the thicknesses on the performance of the pump actuator is depicted in Figs 10 and 11 The optimal thickness of the PZT ring exists for both kU and k2 C0U Because a smaller PZT ring thickness leads to a larger capacitance the value of the optimal PZT ring thickness for k2 C0 (about 025 mm) is larger than the value of the U optimal thickness for kU (about 01 mm) By keeping the thickness of the PZT ring fixed it also can be found that the optimal PZTpassive plate thickness ratio exists for both kU and k2 C0 Because the thickness of the passive U plate will not affect the capacitance the values of both optimal thickness ratios are the same and about 03 in this case
V Experimental Characterization
As mentioned earlier a micropump prototype driving by the ring-type bending actuator has been fabricated in our lab Not all of the design parameters of the prototype are optimal due to the limitations of the experimental conshyditions and the available materials To fabricate the thin PZT ring first a PZT ring with a thickness of 08 mm is cut from a thicker PZT ring using the dicing saw then this PZT ring is ground to the specific thickness After that the top and bottom surfaces of the PZT ring are coated with a thin gold electrode layer using a sputter-coater device The thin stainless steel disk is bought from McMaster-Carr Supply Company Elmhurst IL The PZT ring is bonded onto the stainless steel disk using epoxy Two very thin bare copper wires are connected to the two electrodes of this ring-type bonding actuator using conductive epoxy The pump housing is made of hard transparent plastic material By bonding the ring-type bending actuator onto the pump housing with epoxy the valveless piezoelectric micropump is finally obtained Fig 12 shows the top and cross section of the pump housing
An MTI 2000 Fotonic Sensor (MTI Instruments Inc Albany NY) is used to measure the deflection of the proshytotype As shown in Fig 13 the relationship between the center deflection of the prototype (without liquid loading) and the applied voltage is almost linear This linear reshylationship also is predicted by the theoretical analysis alshythough a certain difference exists between the values of the experimental results and those of the theoretical results Basically increasing the applied voltage will increase the applied electrical field therefore the deflection and the volume displacement will increase as well However the applied electrical field cannot exceed a certain limit or the PZT material will be depolarized This limit of the PZT-5H used in our prototype is about 8 kVcm and for a PZT ring with a thickness of 03 mm the maximum applied voltage should be about 240 V Higher driving voltage also means a larger power consumption The comparison of the deflection distributions along the radius obtained by difshyferent methods is already shown in Fig 6 In general all
471 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 12 Design graph of the micropump housing
Fig 13 Measured center deflection of the micropump diaphragm under different applied voltage (without liquid loading)
the deflection curves show the similar variation trend and the theoretical result is closer to the experimental result quantitatively
The other important factor that can influence the pershyformance of the pump is the driving frequency For the case without liquid loading two methods are used to meashysure the frequency response of the pump actuator One is to measure the center deflection under different driving frequency and the other is to measure the impedance specshytroscopy of this actuator For comparison the numerical results also are obtained by using the commercial FEM package ANSYS 61 As shown in Fig 14 the first resoshynant frequency appears at several kilohertz in which the deflection reaches the maximum value Both resonant freshyquencies obtained by experimental methods are very close and the numerical one is much higher
Fig 14 Frequency response of the micropump obtained by different methods (without liquid loading)
As shown in Fig 15 for the case with water loading the relationship between the center deflection and the applied voltage is also linear In this measurement the applied voltage is sinusoidal and the driving frequency is 200 Hz When applying a sinusoidal alternating current (AC) voltshyage to the actuator the measured deflection signal is also sinusoidal with the same frequency as the driving voltage And a phase shift is observed between the deflection and the applied voltage that may be partly attributed to the hysteresis In Fig 15 only the amplitude of the deflection is shown The frequency responses of the micropump with water loading also are evaluated by both center deflection and impedance spectroscopy From Fig 16 it is found that the results obtained by both methods are very close and
472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

465 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 3 Cross section of the piezoelectric ring-type bending actuator with clamped outer edge
Fig 4 Comparison of the diaphragm deflections under 100 V and 1 kPa separately
Here M0 is the moment caused by actuation of the PZT and can be calculated using the following equation
minusd31Uhpzt M0 = De
h 2 1 1 + (Dpzt + Dp) (3)
2+
h Epzthpzt Ephp
In (1) (2) (3) a and b represent the radius of the PZT disk and the passive plate respectively Dp vp Ep and hp are the flexural modulus Poissonrsquos ratio Youngrsquos modshyulus and thickness of the passive plate De ve and h are the equivalent flexural modulus the equivalent Poissonrsquos ratio and the total thickness of the two-layer structure Dpzt Epzt hpzt and d31 are the flexural modulus Youngrsquos modulus thickness and piezoelectric charge coefficient of the PZT U is the static voltage applied on the PZT
It should be noted that the actuation of a bimorph actushyator can cause both extension and bending For a bimorph beam if the length of the PZT layer is much larger than its thickness the extension is relatively small and can be neglected [27] In the general cases of bending actuators the thickness of the PZT is always much smaller than its length or radius therefore the extension is neglected In the model presented above and the following theoretical
Fig 5 Photo of the piezoelectric valveless micropump prototype
analysis the coupling to extension is not considered Anshyother simplification is to neglect the bonding layer effects on the actuator performance In a similar research on the circular PZT actuator [24] it is found that increasing the bonding will reduce the deflection but this effect is not significant when the PZTpassive layer thickness ratio is beyond 04 Furthermore as for the ring-type actuator preshysented in this paper the bonding layer thickness is very small Therefore it is reasonable to adopt this simplificashytion
Generally to derive an exact analytical solution for the bending deflection of the micropump diaphragm driven by a bonded ring-type piezoelectric actuator when a voltage is applied the governing equations need to be established and solved for three sections the inner passive section the middle three-layer actuator section (PZT layer bondshying layer and passive layer) and the outer passive secshytion Then the unknown parameters in the equations are determined by boundary conditions and continuity condishytions Thus the derivation can be a quite complex proshycess for such complicated problems numerical methods often are used to obtain the results Here for simplicity some assumptions are made so that an approximate anshyalytical model can be established based on the model of the disk-type bending actuator that is introduced above Assuming the whole system is linear and a thin ring-type piezoelectric actuator is used the bending deflection of the actuation membrane can be obtained approximately by subtracting the deflection of a smaller disk-type bending actuator from that of a larger disk-type bending actuator taking the inner radius of the PZT ring as the radius of the smaller PZT disk and the outer radius of the PZT ring as the radius of the larger PZT disk Therefore the equashytions for the ring-type bending actuator are (4)ndash(6) (see next page) where M0 is determined by (3) Ri and Ro are the inner and outer radius of the PZT ring and Rp is the radius of the passive plate The meanings of other paramshyeters are the same as those introduced in the equations for the disk-type bending actuator
466 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
( ) (2) Ro
M0 R2 minus R2 R2 minus r + R2 R2 minus 2R2 ln minus R2 p o o o o p pRp
w1(r) = [ ] ( )2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2
o p p o ( ) (2) Ri (4)
R2 minus R2 R2 minus r + R2 R2 minus 2R2 ln minus R2M0 p i i i i p pRpminus [ ] ( ) 2 Dp (1 + vp) Ri
2 + (1 minus vp) Rp2 + De (1 + ve) Rp
2 minus Ri 2
(0 le r le Ri)
( ) (2) Ro
M0 Rp 2 minus Ro
2 Ro 2 minus r + Ro
2 Ro 2 minus 2Rp
2 ln minus Rp2
Rpw2(r) = [ ] ( )
2 Dp (1 + vp) Ro 2 + (1 minus vp) Rp
2 + De (1 + ve) Rp 2 minus Ro
2
r (5) M0Ri
2 r2 minus 2Rp 2 ln minus Rp
2
Rpminus [ ] ( ) 2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2
i p p i
(Ri le r le Ra)
r M0R
2 r2 minus 2R2ω minus R2 o p Rp
p
w3(r) = [ ] ( )2 Dp (1 + vp) Ro
2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2 p p o
r (6) M0R
2 r2 minus 2R2 ln minus R2 i p pRpminus [ ] ( )
2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2 i p p i
(Ro le r le Rp)
Also based on the theory of plates and shells the deshyflection induced by mechanical pressure also can be detershymined by using the superposition method Combining the established equations from [28] together the deflections caused by pressure for the three different sections are
(2)
p Ri 2 minus r 5 + vp
R2 2 w4(r) = w5 (Ri) + i minus r64Dp 1 + vp
M1 ( 2)+ R2 minus r i2Dp (1 + vp) (7)
(0 le r le Ri)
(2)
p Ro 2 minus r 5 + ve 2 w5(r) = w6 (Ro) + R2 minus ro64De 1 + ve [ ] (
2)
R2M2 minus R2 (M1 minus M ) R2 minus ro i o+(R2 minus R22 (1 + ve) De )o i
r R2R2 (8) (M2 minus M1 + M ) log o i Rominus
(1 minus ve) De (R2 minus R2)o i
(Ri le r le Ro)
p ( 2)2 w6(r) = R2 minus rp64Dp
r(M minus M2) R2 r2 minus 2R2 log minus R2
o p pRp+ [ ] (9) 2Dp (1 minus vp) R2 + (1 + vp) R2 p o
(Ro le r le Rp)
where p is the mechanical pressure exerted onto the pump diaphragm M and M are two intermediate bending moshyments of which
p ( )M =
16(3 + ve) Ro
2 minus Ri 2 (10)
p [ ]M R2 ) minus R2= (1 + vp (3 + vp) (11)
16 p o
The other two intermediate bending moments M1 and M2 can be obtained by solving the continuity equations listed below ⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨
⎪ ⎪ ⎪ ⎪ ⎪ ⎩
dw4(r) dr
r=Ri
= dw5(r)
dr
r=Ri
dw5(r) dr
r=Ro
= dw6(r)
dr
r=Ro
(12)
Note that the continuity of the deflection is already satshyisfied in (7) (8) and (9)
467 zhang and wang valveless micropump and ring-type piezoelectric actuator
TABLE I Dimensions and Material Properties of Micropump Prototype
Piezoelectric disk Bonding layer Passive plate Parameters (PZT-5H)1 (conductive epoxy)2 (stainless steel)
Inner diameter (mm) 63 63 Outer diameter (mm) 1911 1911 254
Thickness (mm) 032 0056 0254 Youngrsquos modulus (Pa) 62 times 1010 517 times 109 195 times 1011
Poissonrsquos ratio 031 03 03 d31 (mV) minus32 times 10minus10
εT 33 (Fm) 2856 times 10minus8
1The properties data are taken from the data sheet of CTS 3203HD 2The properties data are taken from [24]
If the pressure difference exerted on the pump actuashytor is only in the range of several kilopascals the deflecshytion caused by the pressure difference will be very small Fig 4 shows the comparison between the deflection under 100 V of applied voltage and the deflection under 1 kPa of pressure difference for the ring-type bending actuator The dimensions and material properties of the pump actuator used for this calculation are listed in Table I Under such circumstance the effect of the pressure difference on the volume change can be neglected and an analytical solution can be obtained for the flow rate
After the deflection of the pump actuator is determined the following equation can be used to calculate the total volume change of the pump chamber Rp
∆V = 2π w(r)rdr (13) 0
Note here ⎧ ⎪ ⎨ w1(r) 0 le r le Ri w(r) = w2(r) Ri le r le Ro (14) ⎪ ⎩
w3(r) Ro le r le Rp
Substituting the deflection equations into it the relashytionship between the volume change and the actuation voltage can be obtained It can be shown that the volume change is proportional to the actuation voltage which can be expressed as
∆V = kU U (15)
The proportional coefficient depends on the dimension and the material properties of the pump actuator The equation to calculate this coefficient is not listed here due to its complexity But it can be obtained simply by calcushylating the volume change caused by 1 V of applied voltage When the voltage applied across the PZT layer is fixed a larger kU results in a larger volume change So it can be used as a figure-of-merit in evaluation of the piezoelectric pump performance
To obtain a continuous flow an alternating voltage has to be applied to the pump-bending actuator If the driving frequency is far lower than the resonance frequency of the pump actuator U can be substituted by Um sin(ωt) in the
Fig 6 Comparison of the diaphragm deflections obtained by different methods (U = 100 V)
equations derived previously Um is the amplitude of the sinusoidal voltage applied on the piezoelectric plate and ω is the angular frequency
To estimate the net flow rate of the pump the modelshying of the nozzlediffuser also is necessary As mentioned before these nozzlediffuser elements can direct flow from inlet to outlet They are geometrically designed to have a lower pressure loss in one direction than in the opposite direction for the same flow velocity The characteristic of the nozzlediffuser element can be described as follows
∆p =1 ρv2ξ (16)
2
where ∆p is the pressure loss through the nozzlediffuser element ρ is the density of the fluid v is the velocity of the fluid and ξ is the pressure loss coefficient It also can be expressed in the form of flow rate Q
Q = C ∆p (17)
where C is called conductivity coefficient Two different flow directions correspond to two different C values One is higher than the other The conductivity coefficient in a positive direction is represented by CH and the conducshytivity coefficient in a negative direction is represented by
468 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 7 Relationship between the proportional coefficient kU and the passive plate Youngrsquos modulus Ep
CL Accordingly there also are two different ξ values the pressure loss coefficient in positive direction is represented by ξpositive and the pressure loss coefficient in negative direction is represented by ξnegative
As mentioned before it is assumed that the effect of the pressure difference on the volume change is negligible and thus only the volume change induced by applied voltage is considered Also assume that the pressures outside the inlet and outlet are all equal to the atmospheric pressure Given these assumptions the equations from [21] can be used to obtain the analytical solutions for the flow rate
The average net flow rate then is given by
1 kU Umω CH minus CL kU Umω η 2 minus 1
Q = = 1π CH + CL π η 2 + 1 (18)
where 2
ξnegative CHη = =
ξpositive CL
For the miniaturized DMFC power system using a micropump the power to drive the micropump comes from the total power generated by the fuel cell system itself Therefore it is very important to estimate how much enshyergy the micropump needs to consume Electrically the bending-piezoelectric actuator behaves like a planar capacshyitor The electric capacitance under the given mechanical boundary condition is very complicated In a similar case [29] the capacitance of a circular disk-type PZT actuator with clamped edges has been given by
εT 233πa2
Ce = 1 minus 1 minus hpzt 1 minus v( )2
E )23 s11 sphp2hpzt (hp + hpzt
K2 (19) 31ShB31
Fig 8 Coefficient kU (solid curves from top to bottom RiRo = 01 02 03 and 04) and kU
2 C0 (dashed curves from top to bottom RiRo = 01 02 03 and 04) at different PZTpassive plate radius ratio
where εT E is the 33 is the permittivity of the PZT disk s11 elastic compliance of the PZT disk at constant electric field sp is the elastic compliance of the passive layer K31
is the electromechanical coupling coefficient of the PZT disk and v is the Poissonrsquos ratio In [29] it is assumed that the Poissonrsquos ratio of the PZT disk is the same as that of the passive plate and the effect of the bonding layer on the capacitance is neglected The equations for the other
Etwo parameters are Sh = hpztsp + hps11 and 2 E EB31 = hpzt
4 sp + 4s11sphphpzt 3 + 6s11sphp
2hpzt 2 ( )2E E+ 4s11sph
3 phpzt + h4
p s11
The term outside the parenthesis of (19) is actually the capacitance of piezoelectric layer with free boundary condition It is found that the capacitance with clampedshyboundary condition is about 10 to 30 less than the capacshyitance with free-boundary condition Although the boundshyary condition of the pump actuator in this study is not exactly the same as that of [29] the results of two cases should be close For approximation the capacitance with free-boundary condition is used here because the resultant estimation of the pump power consumption will be larger which should be safer for the system design The capacishytance with free-boundary condition is described as
Permittivity times Area C0 = (20)
Thickness
For the ring-type bending actuator ( )εT R2 minus R2 33π o iC0 = (21)
hpzt
Suppose the applied voltage is sinusoidal that is
U(t) = Um sin(ωt) (22)
The current then is dU(t)
i(t) = C0 (23) dt
469 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 9 Coefficient kU and k2 C0 at different passive plate radius U with fixed PZTpassive plate radius ratio
So the instantaneous power consumption is given by
Welec = i(t)U(t) = 1 ωC0U
2 sin(2ωt) (24) m2
It should be noted that as a capacitor the piezoelectric actuator would store a large portion of the input electrishycal energy therefore only part of the input energy can be converted into output mechanical energy for fuel delivery The stored energy will remain in the driving circuit and will be used in the next driving cycle For the worst case the maximum value of Welec is chosen to estimate the efshyficiency of the whole fuel cell system Combining (18) and (24) by eliminating Um we have
πCo η12 + 1 2
2 max Welec = Q (25)
4k2 f η12 minus 1U
where f is the frequency of the driving voltage As shown in (25) the maximum power consumption is
proportional to the capacitance C0 and the square of the average net flow rate Q It also is inversely proportional to the driving frequency f and the square of kU The effect of the nozzlediffuser element is represented by the coefshyficient η The larger this coefficient is the less the power consumption is Q and f are operational parameters C0
and kU depend on the dimensions and material properties of the pump actuator In the following analysis k2 C0 isU considered as a figure-of-merit that can be used to evaluate the performance of the micropump The larger this paramshyeter is the smaller the power consumed by the micropump will be For the miniaturized DMFC power system driven by the micropump it is also very important to keep this micropump power consumption as small as possible while delivering enough fuel flow rate for fuel cell reaction
IV Optimization of Design Parameters Based on Theoretical Analysis
Both the passive layer and the active layer of the microshypump can be made of various materials Also the thickness
Fig 10 Coefficient kU and k2 C0 at different PZT layer thickness U
and the radius of each layer may be different It is possible to optimize the micropump design based on the theoretishycal analysis Two objectives can be used for optimization One is the average net flow rate If the driving voltage and its frequency are fixed based on (18) a larger kU is preferred so that a larger flow rate can be obtained The other objective is the power consumption It is shown in (25) that given the driving frequency and the flow rate a larger k2 C0 is preferred so that the power required to U drive the micropump is smaller Both factors will be evalshyuated in the following analysis
It is necessary to verify the analytical solutions as many assumptions and simplifications have been made during the derivation Here both numerical and experimental reshysults are used to compare with the theoretical results for the ring-type bending actuator The numerical results are obtained by using the commercial FEM package (ANSYS 61 ANSYS Inc) to calculate a wedge-shaped part of the pump actuator with fixing and symmetric boundary conshyditions A three-dimensional (3-D) tetrahedral structural solid element type Solid-92 is chosen to model the passhysive plate and a 3-D tetrahedral coupled-field solid eleshyment type Solid-98 is chosen to model the PZT layer The bonding layer also is neglected The total number of the elements in this model is 2753 The experimental data are measured from a ring-type bending actuator The photo of the micropump prototype driving by this actuator is shown in Fig 5 The material properties and dimensions of this prototype are listed in Table I The applied voltage is 100 V
The comparison of the deflection data obtained by three different methods is shown in Fig 6 For both numerical results and experimental results the maximum deflection appears at the center of the pump actuator Theoretical results are closer to the experimental results however the maximum deflection does not appear at the center This probably means the linear approximation during the theoshyretical derivation does not fit well with the real case Also note that due to the imperfect clamping at the outer edge of the actuator diaphragm the experimental results do not converge to zero at the boundary There are other possible
470 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 11 Coefficient and 2 kU k C0 at different passivePZT U layer thickness ratio with fixed PZT layer thickness
reasons that result in the discrepancy among the results obtained by three different methods As mentioned before the numerical model is using a 3-D structural solid element so stresses and strains in other directions also are conshysidered The theoretical model is based on pure bending assumption and linearization simplification is used The factors that may affect the experimental results are even more complicated including the fabrication defects residshyual stress materials imperfection etc Still from Fig 6 it is shown that both numerical and theoretical methods can provide fair estimations
Based on the theoretical model Figs 7ndash11 are obtained to illustrate the possible factors that can affect the perforshymance of the micropump
Fig 7 shows how the material property of the passive plate can affect the performance of the ring-type bending actuator Increasing the Youngrsquos modulus of the passive plate will reduce kU Therefore it is preferable to choose a passive plate with smaller Youngrsquos modulus so that a larger flow rate can be obtained In addition because there is no connection between the capacitance and the Youngrsquos modulus the variation trend of k2 C0 should be the same U as that of kU
In Fig 8 the solid curves represent kU (from top to botshytom RiRo = 01 02 03 and 04) and the dot curves repshyresent k2 C0 (from top to bottom RiRo = 01 02 03 U and 04) So it is obvious that increasing the innerouter radius ratio of the PZT ring will reduce both kU and k2 C0 Increasing Ri will reduce the capacitance how-U ever it also will reduce the deflection at the same time As a whole k2 C0 is decreasing when Ri is increasing U Also an optimal PZTpassive plate radius ratio exists for both kU and k2 C0 The optimal ratio for kU (about 08) U is larger than the optimal ratio for k2 C0 (about 07) be-U cause a larger PZT ring radius results in a larger capacshyitance Keeping both the innerouter radius ratio of the PZT ring and the PZTpassive plate radius ratio fixed the curves of both kU and k2 C0 as a function of the U passive plate radius can be obtained As shown in Fig 9
increasing the radius of the passive plate will increase both kU and k2 C0U
The effect of the thicknesses on the performance of the pump actuator is depicted in Figs 10 and 11 The optimal thickness of the PZT ring exists for both kU and k2 C0U Because a smaller PZT ring thickness leads to a larger capacitance the value of the optimal PZT ring thickness for k2 C0 (about 025 mm) is larger than the value of the U optimal thickness for kU (about 01 mm) By keeping the thickness of the PZT ring fixed it also can be found that the optimal PZTpassive plate thickness ratio exists for both kU and k2 C0 Because the thickness of the passive U plate will not affect the capacitance the values of both optimal thickness ratios are the same and about 03 in this case
V Experimental Characterization
As mentioned earlier a micropump prototype driving by the ring-type bending actuator has been fabricated in our lab Not all of the design parameters of the prototype are optimal due to the limitations of the experimental conshyditions and the available materials To fabricate the thin PZT ring first a PZT ring with a thickness of 08 mm is cut from a thicker PZT ring using the dicing saw then this PZT ring is ground to the specific thickness After that the top and bottom surfaces of the PZT ring are coated with a thin gold electrode layer using a sputter-coater device The thin stainless steel disk is bought from McMaster-Carr Supply Company Elmhurst IL The PZT ring is bonded onto the stainless steel disk using epoxy Two very thin bare copper wires are connected to the two electrodes of this ring-type bonding actuator using conductive epoxy The pump housing is made of hard transparent plastic material By bonding the ring-type bending actuator onto the pump housing with epoxy the valveless piezoelectric micropump is finally obtained Fig 12 shows the top and cross section of the pump housing
An MTI 2000 Fotonic Sensor (MTI Instruments Inc Albany NY) is used to measure the deflection of the proshytotype As shown in Fig 13 the relationship between the center deflection of the prototype (without liquid loading) and the applied voltage is almost linear This linear reshylationship also is predicted by the theoretical analysis alshythough a certain difference exists between the values of the experimental results and those of the theoretical results Basically increasing the applied voltage will increase the applied electrical field therefore the deflection and the volume displacement will increase as well However the applied electrical field cannot exceed a certain limit or the PZT material will be depolarized This limit of the PZT-5H used in our prototype is about 8 kVcm and for a PZT ring with a thickness of 03 mm the maximum applied voltage should be about 240 V Higher driving voltage also means a larger power consumption The comparison of the deflection distributions along the radius obtained by difshyferent methods is already shown in Fig 6 In general all
471 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 12 Design graph of the micropump housing
Fig 13 Measured center deflection of the micropump diaphragm under different applied voltage (without liquid loading)
the deflection curves show the similar variation trend and the theoretical result is closer to the experimental result quantitatively
The other important factor that can influence the pershyformance of the pump is the driving frequency For the case without liquid loading two methods are used to meashysure the frequency response of the pump actuator One is to measure the center deflection under different driving frequency and the other is to measure the impedance specshytroscopy of this actuator For comparison the numerical results also are obtained by using the commercial FEM package ANSYS 61 As shown in Fig 14 the first resoshynant frequency appears at several kilohertz in which the deflection reaches the maximum value Both resonant freshyquencies obtained by experimental methods are very close and the numerical one is much higher
Fig 14 Frequency response of the micropump obtained by different methods (without liquid loading)
As shown in Fig 15 for the case with water loading the relationship between the center deflection and the applied voltage is also linear In this measurement the applied voltage is sinusoidal and the driving frequency is 200 Hz When applying a sinusoidal alternating current (AC) voltshyage to the actuator the measured deflection signal is also sinusoidal with the same frequency as the driving voltage And a phase shift is observed between the deflection and the applied voltage that may be partly attributed to the hysteresis In Fig 15 only the amplitude of the deflection is shown The frequency responses of the micropump with water loading also are evaluated by both center deflection and impedance spectroscopy From Fig 16 it is found that the results obtained by both methods are very close and
472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

466 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
( ) (2) Ro
M0 R2 minus R2 R2 minus r + R2 R2 minus 2R2 ln minus R2 p o o o o p pRp
w1(r) = [ ] ( )2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2
o p p o ( ) (2) Ri (4)
R2 minus R2 R2 minus r + R2 R2 minus 2R2 ln minus R2M0 p i i i i p pRpminus [ ] ( ) 2 Dp (1 + vp) Ri
2 + (1 minus vp) Rp2 + De (1 + ve) Rp
2 minus Ri 2
(0 le r le Ri)
( ) (2) Ro
M0 Rp 2 minus Ro
2 Ro 2 minus r + Ro
2 Ro 2 minus 2Rp
2 ln minus Rp2
Rpw2(r) = [ ] ( )
2 Dp (1 + vp) Ro 2 + (1 minus vp) Rp
2 + De (1 + ve) Rp 2 minus Ro
2
r (5) M0Ri
2 r2 minus 2Rp 2 ln minus Rp
2
Rpminus [ ] ( ) 2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2
i p p i
(Ri le r le Ra)
r M0R
2 r2 minus 2R2ω minus R2 o p Rp
p
w3(r) = [ ] ( )2 Dp (1 + vp) Ro
2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2 p p o
r (6) M0R
2 r2 minus 2R2 ln minus R2 i p pRpminus [ ] ( )
2 Dp (1 + vp) R2 + (1 minus vp) R2 + De (1 + ve) R2 minus R2 i p p i
(Ro le r le Rp)
Also based on the theory of plates and shells the deshyflection induced by mechanical pressure also can be detershymined by using the superposition method Combining the established equations from [28] together the deflections caused by pressure for the three different sections are
(2)
p Ri 2 minus r 5 + vp
R2 2 w4(r) = w5 (Ri) + i minus r64Dp 1 + vp
M1 ( 2)+ R2 minus r i2Dp (1 + vp) (7)
(0 le r le Ri)
(2)
p Ro 2 minus r 5 + ve 2 w5(r) = w6 (Ro) + R2 minus ro64De 1 + ve [ ] (
2)
R2M2 minus R2 (M1 minus M ) R2 minus ro i o+(R2 minus R22 (1 + ve) De )o i
r R2R2 (8) (M2 minus M1 + M ) log o i Rominus
(1 minus ve) De (R2 minus R2)o i
(Ri le r le Ro)
p ( 2)2 w6(r) = R2 minus rp64Dp
r(M minus M2) R2 r2 minus 2R2 log minus R2
o p pRp+ [ ] (9) 2Dp (1 minus vp) R2 + (1 + vp) R2 p o
(Ro le r le Rp)
where p is the mechanical pressure exerted onto the pump diaphragm M and M are two intermediate bending moshyments of which
p ( )M =
16(3 + ve) Ro
2 minus Ri 2 (10)
p [ ]M R2 ) minus R2= (1 + vp (3 + vp) (11)
16 p o
The other two intermediate bending moments M1 and M2 can be obtained by solving the continuity equations listed below ⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨
⎪ ⎪ ⎪ ⎪ ⎪ ⎩
dw4(r) dr
r=Ri
= dw5(r)
dr
r=Ri
dw5(r) dr
r=Ro
= dw6(r)
dr
r=Ro
(12)
Note that the continuity of the deflection is already satshyisfied in (7) (8) and (9)
467 zhang and wang valveless micropump and ring-type piezoelectric actuator
TABLE I Dimensions and Material Properties of Micropump Prototype
Piezoelectric disk Bonding layer Passive plate Parameters (PZT-5H)1 (conductive epoxy)2 (stainless steel)
Inner diameter (mm) 63 63 Outer diameter (mm) 1911 1911 254
Thickness (mm) 032 0056 0254 Youngrsquos modulus (Pa) 62 times 1010 517 times 109 195 times 1011
Poissonrsquos ratio 031 03 03 d31 (mV) minus32 times 10minus10
εT 33 (Fm) 2856 times 10minus8
1The properties data are taken from the data sheet of CTS 3203HD 2The properties data are taken from [24]
If the pressure difference exerted on the pump actuashytor is only in the range of several kilopascals the deflecshytion caused by the pressure difference will be very small Fig 4 shows the comparison between the deflection under 100 V of applied voltage and the deflection under 1 kPa of pressure difference for the ring-type bending actuator The dimensions and material properties of the pump actuator used for this calculation are listed in Table I Under such circumstance the effect of the pressure difference on the volume change can be neglected and an analytical solution can be obtained for the flow rate
After the deflection of the pump actuator is determined the following equation can be used to calculate the total volume change of the pump chamber Rp
∆V = 2π w(r)rdr (13) 0
Note here ⎧ ⎪ ⎨ w1(r) 0 le r le Ri w(r) = w2(r) Ri le r le Ro (14) ⎪ ⎩
w3(r) Ro le r le Rp
Substituting the deflection equations into it the relashytionship between the volume change and the actuation voltage can be obtained It can be shown that the volume change is proportional to the actuation voltage which can be expressed as
∆V = kU U (15)
The proportional coefficient depends on the dimension and the material properties of the pump actuator The equation to calculate this coefficient is not listed here due to its complexity But it can be obtained simply by calcushylating the volume change caused by 1 V of applied voltage When the voltage applied across the PZT layer is fixed a larger kU results in a larger volume change So it can be used as a figure-of-merit in evaluation of the piezoelectric pump performance
To obtain a continuous flow an alternating voltage has to be applied to the pump-bending actuator If the driving frequency is far lower than the resonance frequency of the pump actuator U can be substituted by Um sin(ωt) in the
Fig 6 Comparison of the diaphragm deflections obtained by different methods (U = 100 V)
equations derived previously Um is the amplitude of the sinusoidal voltage applied on the piezoelectric plate and ω is the angular frequency
To estimate the net flow rate of the pump the modelshying of the nozzlediffuser also is necessary As mentioned before these nozzlediffuser elements can direct flow from inlet to outlet They are geometrically designed to have a lower pressure loss in one direction than in the opposite direction for the same flow velocity The characteristic of the nozzlediffuser element can be described as follows
∆p =1 ρv2ξ (16)
2
where ∆p is the pressure loss through the nozzlediffuser element ρ is the density of the fluid v is the velocity of the fluid and ξ is the pressure loss coefficient It also can be expressed in the form of flow rate Q
Q = C ∆p (17)
where C is called conductivity coefficient Two different flow directions correspond to two different C values One is higher than the other The conductivity coefficient in a positive direction is represented by CH and the conducshytivity coefficient in a negative direction is represented by
468 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 7 Relationship between the proportional coefficient kU and the passive plate Youngrsquos modulus Ep
CL Accordingly there also are two different ξ values the pressure loss coefficient in positive direction is represented by ξpositive and the pressure loss coefficient in negative direction is represented by ξnegative
As mentioned before it is assumed that the effect of the pressure difference on the volume change is negligible and thus only the volume change induced by applied voltage is considered Also assume that the pressures outside the inlet and outlet are all equal to the atmospheric pressure Given these assumptions the equations from [21] can be used to obtain the analytical solutions for the flow rate
The average net flow rate then is given by
1 kU Umω CH minus CL kU Umω η 2 minus 1
Q = = 1π CH + CL π η 2 + 1 (18)
where 2
ξnegative CHη = =
ξpositive CL
For the miniaturized DMFC power system using a micropump the power to drive the micropump comes from the total power generated by the fuel cell system itself Therefore it is very important to estimate how much enshyergy the micropump needs to consume Electrically the bending-piezoelectric actuator behaves like a planar capacshyitor The electric capacitance under the given mechanical boundary condition is very complicated In a similar case [29] the capacitance of a circular disk-type PZT actuator with clamped edges has been given by
εT 233πa2
Ce = 1 minus 1 minus hpzt 1 minus v( )2
E )23 s11 sphp2hpzt (hp + hpzt
K2 (19) 31ShB31
Fig 8 Coefficient kU (solid curves from top to bottom RiRo = 01 02 03 and 04) and kU
2 C0 (dashed curves from top to bottom RiRo = 01 02 03 and 04) at different PZTpassive plate radius ratio
where εT E is the 33 is the permittivity of the PZT disk s11 elastic compliance of the PZT disk at constant electric field sp is the elastic compliance of the passive layer K31
is the electromechanical coupling coefficient of the PZT disk and v is the Poissonrsquos ratio In [29] it is assumed that the Poissonrsquos ratio of the PZT disk is the same as that of the passive plate and the effect of the bonding layer on the capacitance is neglected The equations for the other
Etwo parameters are Sh = hpztsp + hps11 and 2 E EB31 = hpzt
4 sp + 4s11sphphpzt 3 + 6s11sphp
2hpzt 2 ( )2E E+ 4s11sph
3 phpzt + h4
p s11
The term outside the parenthesis of (19) is actually the capacitance of piezoelectric layer with free boundary condition It is found that the capacitance with clampedshyboundary condition is about 10 to 30 less than the capacshyitance with free-boundary condition Although the boundshyary condition of the pump actuator in this study is not exactly the same as that of [29] the results of two cases should be close For approximation the capacitance with free-boundary condition is used here because the resultant estimation of the pump power consumption will be larger which should be safer for the system design The capacishytance with free-boundary condition is described as
Permittivity times Area C0 = (20)
Thickness
For the ring-type bending actuator ( )εT R2 minus R2 33π o iC0 = (21)
hpzt
Suppose the applied voltage is sinusoidal that is
U(t) = Um sin(ωt) (22)
The current then is dU(t)
i(t) = C0 (23) dt
469 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 9 Coefficient kU and k2 C0 at different passive plate radius U with fixed PZTpassive plate radius ratio
So the instantaneous power consumption is given by
Welec = i(t)U(t) = 1 ωC0U
2 sin(2ωt) (24) m2
It should be noted that as a capacitor the piezoelectric actuator would store a large portion of the input electrishycal energy therefore only part of the input energy can be converted into output mechanical energy for fuel delivery The stored energy will remain in the driving circuit and will be used in the next driving cycle For the worst case the maximum value of Welec is chosen to estimate the efshyficiency of the whole fuel cell system Combining (18) and (24) by eliminating Um we have
πCo η12 + 1 2
2 max Welec = Q (25)
4k2 f η12 minus 1U
where f is the frequency of the driving voltage As shown in (25) the maximum power consumption is
proportional to the capacitance C0 and the square of the average net flow rate Q It also is inversely proportional to the driving frequency f and the square of kU The effect of the nozzlediffuser element is represented by the coefshyficient η The larger this coefficient is the less the power consumption is Q and f are operational parameters C0
and kU depend on the dimensions and material properties of the pump actuator In the following analysis k2 C0 isU considered as a figure-of-merit that can be used to evaluate the performance of the micropump The larger this paramshyeter is the smaller the power consumed by the micropump will be For the miniaturized DMFC power system driven by the micropump it is also very important to keep this micropump power consumption as small as possible while delivering enough fuel flow rate for fuel cell reaction
IV Optimization of Design Parameters Based on Theoretical Analysis
Both the passive layer and the active layer of the microshypump can be made of various materials Also the thickness
Fig 10 Coefficient kU and k2 C0 at different PZT layer thickness U
and the radius of each layer may be different It is possible to optimize the micropump design based on the theoretishycal analysis Two objectives can be used for optimization One is the average net flow rate If the driving voltage and its frequency are fixed based on (18) a larger kU is preferred so that a larger flow rate can be obtained The other objective is the power consumption It is shown in (25) that given the driving frequency and the flow rate a larger k2 C0 is preferred so that the power required to U drive the micropump is smaller Both factors will be evalshyuated in the following analysis
It is necessary to verify the analytical solutions as many assumptions and simplifications have been made during the derivation Here both numerical and experimental reshysults are used to compare with the theoretical results for the ring-type bending actuator The numerical results are obtained by using the commercial FEM package (ANSYS 61 ANSYS Inc) to calculate a wedge-shaped part of the pump actuator with fixing and symmetric boundary conshyditions A three-dimensional (3-D) tetrahedral structural solid element type Solid-92 is chosen to model the passhysive plate and a 3-D tetrahedral coupled-field solid eleshyment type Solid-98 is chosen to model the PZT layer The bonding layer also is neglected The total number of the elements in this model is 2753 The experimental data are measured from a ring-type bending actuator The photo of the micropump prototype driving by this actuator is shown in Fig 5 The material properties and dimensions of this prototype are listed in Table I The applied voltage is 100 V
The comparison of the deflection data obtained by three different methods is shown in Fig 6 For both numerical results and experimental results the maximum deflection appears at the center of the pump actuator Theoretical results are closer to the experimental results however the maximum deflection does not appear at the center This probably means the linear approximation during the theoshyretical derivation does not fit well with the real case Also note that due to the imperfect clamping at the outer edge of the actuator diaphragm the experimental results do not converge to zero at the boundary There are other possible
470 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 11 Coefficient and 2 kU k C0 at different passivePZT U layer thickness ratio with fixed PZT layer thickness
reasons that result in the discrepancy among the results obtained by three different methods As mentioned before the numerical model is using a 3-D structural solid element so stresses and strains in other directions also are conshysidered The theoretical model is based on pure bending assumption and linearization simplification is used The factors that may affect the experimental results are even more complicated including the fabrication defects residshyual stress materials imperfection etc Still from Fig 6 it is shown that both numerical and theoretical methods can provide fair estimations
Based on the theoretical model Figs 7ndash11 are obtained to illustrate the possible factors that can affect the perforshymance of the micropump
Fig 7 shows how the material property of the passive plate can affect the performance of the ring-type bending actuator Increasing the Youngrsquos modulus of the passive plate will reduce kU Therefore it is preferable to choose a passive plate with smaller Youngrsquos modulus so that a larger flow rate can be obtained In addition because there is no connection between the capacitance and the Youngrsquos modulus the variation trend of k2 C0 should be the same U as that of kU
In Fig 8 the solid curves represent kU (from top to botshytom RiRo = 01 02 03 and 04) and the dot curves repshyresent k2 C0 (from top to bottom RiRo = 01 02 03 U and 04) So it is obvious that increasing the innerouter radius ratio of the PZT ring will reduce both kU and k2 C0 Increasing Ri will reduce the capacitance how-U ever it also will reduce the deflection at the same time As a whole k2 C0 is decreasing when Ri is increasing U Also an optimal PZTpassive plate radius ratio exists for both kU and k2 C0 The optimal ratio for kU (about 08) U is larger than the optimal ratio for k2 C0 (about 07) be-U cause a larger PZT ring radius results in a larger capacshyitance Keeping both the innerouter radius ratio of the PZT ring and the PZTpassive plate radius ratio fixed the curves of both kU and k2 C0 as a function of the U passive plate radius can be obtained As shown in Fig 9
increasing the radius of the passive plate will increase both kU and k2 C0U
The effect of the thicknesses on the performance of the pump actuator is depicted in Figs 10 and 11 The optimal thickness of the PZT ring exists for both kU and k2 C0U Because a smaller PZT ring thickness leads to a larger capacitance the value of the optimal PZT ring thickness for k2 C0 (about 025 mm) is larger than the value of the U optimal thickness for kU (about 01 mm) By keeping the thickness of the PZT ring fixed it also can be found that the optimal PZTpassive plate thickness ratio exists for both kU and k2 C0 Because the thickness of the passive U plate will not affect the capacitance the values of both optimal thickness ratios are the same and about 03 in this case
V Experimental Characterization
As mentioned earlier a micropump prototype driving by the ring-type bending actuator has been fabricated in our lab Not all of the design parameters of the prototype are optimal due to the limitations of the experimental conshyditions and the available materials To fabricate the thin PZT ring first a PZT ring with a thickness of 08 mm is cut from a thicker PZT ring using the dicing saw then this PZT ring is ground to the specific thickness After that the top and bottom surfaces of the PZT ring are coated with a thin gold electrode layer using a sputter-coater device The thin stainless steel disk is bought from McMaster-Carr Supply Company Elmhurst IL The PZT ring is bonded onto the stainless steel disk using epoxy Two very thin bare copper wires are connected to the two electrodes of this ring-type bonding actuator using conductive epoxy The pump housing is made of hard transparent plastic material By bonding the ring-type bending actuator onto the pump housing with epoxy the valveless piezoelectric micropump is finally obtained Fig 12 shows the top and cross section of the pump housing
An MTI 2000 Fotonic Sensor (MTI Instruments Inc Albany NY) is used to measure the deflection of the proshytotype As shown in Fig 13 the relationship between the center deflection of the prototype (without liquid loading) and the applied voltage is almost linear This linear reshylationship also is predicted by the theoretical analysis alshythough a certain difference exists between the values of the experimental results and those of the theoretical results Basically increasing the applied voltage will increase the applied electrical field therefore the deflection and the volume displacement will increase as well However the applied electrical field cannot exceed a certain limit or the PZT material will be depolarized This limit of the PZT-5H used in our prototype is about 8 kVcm and for a PZT ring with a thickness of 03 mm the maximum applied voltage should be about 240 V Higher driving voltage also means a larger power consumption The comparison of the deflection distributions along the radius obtained by difshyferent methods is already shown in Fig 6 In general all
471 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 12 Design graph of the micropump housing
Fig 13 Measured center deflection of the micropump diaphragm under different applied voltage (without liquid loading)
the deflection curves show the similar variation trend and the theoretical result is closer to the experimental result quantitatively
The other important factor that can influence the pershyformance of the pump is the driving frequency For the case without liquid loading two methods are used to meashysure the frequency response of the pump actuator One is to measure the center deflection under different driving frequency and the other is to measure the impedance specshytroscopy of this actuator For comparison the numerical results also are obtained by using the commercial FEM package ANSYS 61 As shown in Fig 14 the first resoshynant frequency appears at several kilohertz in which the deflection reaches the maximum value Both resonant freshyquencies obtained by experimental methods are very close and the numerical one is much higher
Fig 14 Frequency response of the micropump obtained by different methods (without liquid loading)
As shown in Fig 15 for the case with water loading the relationship between the center deflection and the applied voltage is also linear In this measurement the applied voltage is sinusoidal and the driving frequency is 200 Hz When applying a sinusoidal alternating current (AC) voltshyage to the actuator the measured deflection signal is also sinusoidal with the same frequency as the driving voltage And a phase shift is observed between the deflection and the applied voltage that may be partly attributed to the hysteresis In Fig 15 only the amplitude of the deflection is shown The frequency responses of the micropump with water loading also are evaluated by both center deflection and impedance spectroscopy From Fig 16 it is found that the results obtained by both methods are very close and
472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

467 zhang and wang valveless micropump and ring-type piezoelectric actuator
TABLE I Dimensions and Material Properties of Micropump Prototype
Piezoelectric disk Bonding layer Passive plate Parameters (PZT-5H)1 (conductive epoxy)2 (stainless steel)
Inner diameter (mm) 63 63 Outer diameter (mm) 1911 1911 254
Thickness (mm) 032 0056 0254 Youngrsquos modulus (Pa) 62 times 1010 517 times 109 195 times 1011
Poissonrsquos ratio 031 03 03 d31 (mV) minus32 times 10minus10
εT 33 (Fm) 2856 times 10minus8
1The properties data are taken from the data sheet of CTS 3203HD 2The properties data are taken from [24]
If the pressure difference exerted on the pump actuashytor is only in the range of several kilopascals the deflecshytion caused by the pressure difference will be very small Fig 4 shows the comparison between the deflection under 100 V of applied voltage and the deflection under 1 kPa of pressure difference for the ring-type bending actuator The dimensions and material properties of the pump actuator used for this calculation are listed in Table I Under such circumstance the effect of the pressure difference on the volume change can be neglected and an analytical solution can be obtained for the flow rate
After the deflection of the pump actuator is determined the following equation can be used to calculate the total volume change of the pump chamber Rp
∆V = 2π w(r)rdr (13) 0
Note here ⎧ ⎪ ⎨ w1(r) 0 le r le Ri w(r) = w2(r) Ri le r le Ro (14) ⎪ ⎩
w3(r) Ro le r le Rp
Substituting the deflection equations into it the relashytionship between the volume change and the actuation voltage can be obtained It can be shown that the volume change is proportional to the actuation voltage which can be expressed as
∆V = kU U (15)
The proportional coefficient depends on the dimension and the material properties of the pump actuator The equation to calculate this coefficient is not listed here due to its complexity But it can be obtained simply by calcushylating the volume change caused by 1 V of applied voltage When the voltage applied across the PZT layer is fixed a larger kU results in a larger volume change So it can be used as a figure-of-merit in evaluation of the piezoelectric pump performance
To obtain a continuous flow an alternating voltage has to be applied to the pump-bending actuator If the driving frequency is far lower than the resonance frequency of the pump actuator U can be substituted by Um sin(ωt) in the
Fig 6 Comparison of the diaphragm deflections obtained by different methods (U = 100 V)
equations derived previously Um is the amplitude of the sinusoidal voltage applied on the piezoelectric plate and ω is the angular frequency
To estimate the net flow rate of the pump the modelshying of the nozzlediffuser also is necessary As mentioned before these nozzlediffuser elements can direct flow from inlet to outlet They are geometrically designed to have a lower pressure loss in one direction than in the opposite direction for the same flow velocity The characteristic of the nozzlediffuser element can be described as follows
∆p =1 ρv2ξ (16)
2
where ∆p is the pressure loss through the nozzlediffuser element ρ is the density of the fluid v is the velocity of the fluid and ξ is the pressure loss coefficient It also can be expressed in the form of flow rate Q
Q = C ∆p (17)
where C is called conductivity coefficient Two different flow directions correspond to two different C values One is higher than the other The conductivity coefficient in a positive direction is represented by CH and the conducshytivity coefficient in a negative direction is represented by
468 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 7 Relationship between the proportional coefficient kU and the passive plate Youngrsquos modulus Ep
CL Accordingly there also are two different ξ values the pressure loss coefficient in positive direction is represented by ξpositive and the pressure loss coefficient in negative direction is represented by ξnegative
As mentioned before it is assumed that the effect of the pressure difference on the volume change is negligible and thus only the volume change induced by applied voltage is considered Also assume that the pressures outside the inlet and outlet are all equal to the atmospheric pressure Given these assumptions the equations from [21] can be used to obtain the analytical solutions for the flow rate
The average net flow rate then is given by
1 kU Umω CH minus CL kU Umω η 2 minus 1
Q = = 1π CH + CL π η 2 + 1 (18)
where 2
ξnegative CHη = =
ξpositive CL
For the miniaturized DMFC power system using a micropump the power to drive the micropump comes from the total power generated by the fuel cell system itself Therefore it is very important to estimate how much enshyergy the micropump needs to consume Electrically the bending-piezoelectric actuator behaves like a planar capacshyitor The electric capacitance under the given mechanical boundary condition is very complicated In a similar case [29] the capacitance of a circular disk-type PZT actuator with clamped edges has been given by
εT 233πa2
Ce = 1 minus 1 minus hpzt 1 minus v( )2
E )23 s11 sphp2hpzt (hp + hpzt
K2 (19) 31ShB31
Fig 8 Coefficient kU (solid curves from top to bottom RiRo = 01 02 03 and 04) and kU
2 C0 (dashed curves from top to bottom RiRo = 01 02 03 and 04) at different PZTpassive plate radius ratio
where εT E is the 33 is the permittivity of the PZT disk s11 elastic compliance of the PZT disk at constant electric field sp is the elastic compliance of the passive layer K31
is the electromechanical coupling coefficient of the PZT disk and v is the Poissonrsquos ratio In [29] it is assumed that the Poissonrsquos ratio of the PZT disk is the same as that of the passive plate and the effect of the bonding layer on the capacitance is neglected The equations for the other
Etwo parameters are Sh = hpztsp + hps11 and 2 E EB31 = hpzt
4 sp + 4s11sphphpzt 3 + 6s11sphp
2hpzt 2 ( )2E E+ 4s11sph
3 phpzt + h4
p s11
The term outside the parenthesis of (19) is actually the capacitance of piezoelectric layer with free boundary condition It is found that the capacitance with clampedshyboundary condition is about 10 to 30 less than the capacshyitance with free-boundary condition Although the boundshyary condition of the pump actuator in this study is not exactly the same as that of [29] the results of two cases should be close For approximation the capacitance with free-boundary condition is used here because the resultant estimation of the pump power consumption will be larger which should be safer for the system design The capacishytance with free-boundary condition is described as
Permittivity times Area C0 = (20)
Thickness
For the ring-type bending actuator ( )εT R2 minus R2 33π o iC0 = (21)
hpzt
Suppose the applied voltage is sinusoidal that is
U(t) = Um sin(ωt) (22)
The current then is dU(t)
i(t) = C0 (23) dt
469 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 9 Coefficient kU and k2 C0 at different passive plate radius U with fixed PZTpassive plate radius ratio
So the instantaneous power consumption is given by
Welec = i(t)U(t) = 1 ωC0U
2 sin(2ωt) (24) m2
It should be noted that as a capacitor the piezoelectric actuator would store a large portion of the input electrishycal energy therefore only part of the input energy can be converted into output mechanical energy for fuel delivery The stored energy will remain in the driving circuit and will be used in the next driving cycle For the worst case the maximum value of Welec is chosen to estimate the efshyficiency of the whole fuel cell system Combining (18) and (24) by eliminating Um we have
πCo η12 + 1 2
2 max Welec = Q (25)
4k2 f η12 minus 1U
where f is the frequency of the driving voltage As shown in (25) the maximum power consumption is
proportional to the capacitance C0 and the square of the average net flow rate Q It also is inversely proportional to the driving frequency f and the square of kU The effect of the nozzlediffuser element is represented by the coefshyficient η The larger this coefficient is the less the power consumption is Q and f are operational parameters C0
and kU depend on the dimensions and material properties of the pump actuator In the following analysis k2 C0 isU considered as a figure-of-merit that can be used to evaluate the performance of the micropump The larger this paramshyeter is the smaller the power consumed by the micropump will be For the miniaturized DMFC power system driven by the micropump it is also very important to keep this micropump power consumption as small as possible while delivering enough fuel flow rate for fuel cell reaction
IV Optimization of Design Parameters Based on Theoretical Analysis
Both the passive layer and the active layer of the microshypump can be made of various materials Also the thickness
Fig 10 Coefficient kU and k2 C0 at different PZT layer thickness U
and the radius of each layer may be different It is possible to optimize the micropump design based on the theoretishycal analysis Two objectives can be used for optimization One is the average net flow rate If the driving voltage and its frequency are fixed based on (18) a larger kU is preferred so that a larger flow rate can be obtained The other objective is the power consumption It is shown in (25) that given the driving frequency and the flow rate a larger k2 C0 is preferred so that the power required to U drive the micropump is smaller Both factors will be evalshyuated in the following analysis
It is necessary to verify the analytical solutions as many assumptions and simplifications have been made during the derivation Here both numerical and experimental reshysults are used to compare with the theoretical results for the ring-type bending actuator The numerical results are obtained by using the commercial FEM package (ANSYS 61 ANSYS Inc) to calculate a wedge-shaped part of the pump actuator with fixing and symmetric boundary conshyditions A three-dimensional (3-D) tetrahedral structural solid element type Solid-92 is chosen to model the passhysive plate and a 3-D tetrahedral coupled-field solid eleshyment type Solid-98 is chosen to model the PZT layer The bonding layer also is neglected The total number of the elements in this model is 2753 The experimental data are measured from a ring-type bending actuator The photo of the micropump prototype driving by this actuator is shown in Fig 5 The material properties and dimensions of this prototype are listed in Table I The applied voltage is 100 V
The comparison of the deflection data obtained by three different methods is shown in Fig 6 For both numerical results and experimental results the maximum deflection appears at the center of the pump actuator Theoretical results are closer to the experimental results however the maximum deflection does not appear at the center This probably means the linear approximation during the theoshyretical derivation does not fit well with the real case Also note that due to the imperfect clamping at the outer edge of the actuator diaphragm the experimental results do not converge to zero at the boundary There are other possible
470 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 11 Coefficient and 2 kU k C0 at different passivePZT U layer thickness ratio with fixed PZT layer thickness
reasons that result in the discrepancy among the results obtained by three different methods As mentioned before the numerical model is using a 3-D structural solid element so stresses and strains in other directions also are conshysidered The theoretical model is based on pure bending assumption and linearization simplification is used The factors that may affect the experimental results are even more complicated including the fabrication defects residshyual stress materials imperfection etc Still from Fig 6 it is shown that both numerical and theoretical methods can provide fair estimations
Based on the theoretical model Figs 7ndash11 are obtained to illustrate the possible factors that can affect the perforshymance of the micropump
Fig 7 shows how the material property of the passive plate can affect the performance of the ring-type bending actuator Increasing the Youngrsquos modulus of the passive plate will reduce kU Therefore it is preferable to choose a passive plate with smaller Youngrsquos modulus so that a larger flow rate can be obtained In addition because there is no connection between the capacitance and the Youngrsquos modulus the variation trend of k2 C0 should be the same U as that of kU
In Fig 8 the solid curves represent kU (from top to botshytom RiRo = 01 02 03 and 04) and the dot curves repshyresent k2 C0 (from top to bottom RiRo = 01 02 03 U and 04) So it is obvious that increasing the innerouter radius ratio of the PZT ring will reduce both kU and k2 C0 Increasing Ri will reduce the capacitance how-U ever it also will reduce the deflection at the same time As a whole k2 C0 is decreasing when Ri is increasing U Also an optimal PZTpassive plate radius ratio exists for both kU and k2 C0 The optimal ratio for kU (about 08) U is larger than the optimal ratio for k2 C0 (about 07) be-U cause a larger PZT ring radius results in a larger capacshyitance Keeping both the innerouter radius ratio of the PZT ring and the PZTpassive plate radius ratio fixed the curves of both kU and k2 C0 as a function of the U passive plate radius can be obtained As shown in Fig 9
increasing the radius of the passive plate will increase both kU and k2 C0U
The effect of the thicknesses on the performance of the pump actuator is depicted in Figs 10 and 11 The optimal thickness of the PZT ring exists for both kU and k2 C0U Because a smaller PZT ring thickness leads to a larger capacitance the value of the optimal PZT ring thickness for k2 C0 (about 025 mm) is larger than the value of the U optimal thickness for kU (about 01 mm) By keeping the thickness of the PZT ring fixed it also can be found that the optimal PZTpassive plate thickness ratio exists for both kU and k2 C0 Because the thickness of the passive U plate will not affect the capacitance the values of both optimal thickness ratios are the same and about 03 in this case
V Experimental Characterization
As mentioned earlier a micropump prototype driving by the ring-type bending actuator has been fabricated in our lab Not all of the design parameters of the prototype are optimal due to the limitations of the experimental conshyditions and the available materials To fabricate the thin PZT ring first a PZT ring with a thickness of 08 mm is cut from a thicker PZT ring using the dicing saw then this PZT ring is ground to the specific thickness After that the top and bottom surfaces of the PZT ring are coated with a thin gold electrode layer using a sputter-coater device The thin stainless steel disk is bought from McMaster-Carr Supply Company Elmhurst IL The PZT ring is bonded onto the stainless steel disk using epoxy Two very thin bare copper wires are connected to the two electrodes of this ring-type bonding actuator using conductive epoxy The pump housing is made of hard transparent plastic material By bonding the ring-type bending actuator onto the pump housing with epoxy the valveless piezoelectric micropump is finally obtained Fig 12 shows the top and cross section of the pump housing
An MTI 2000 Fotonic Sensor (MTI Instruments Inc Albany NY) is used to measure the deflection of the proshytotype As shown in Fig 13 the relationship between the center deflection of the prototype (without liquid loading) and the applied voltage is almost linear This linear reshylationship also is predicted by the theoretical analysis alshythough a certain difference exists between the values of the experimental results and those of the theoretical results Basically increasing the applied voltage will increase the applied electrical field therefore the deflection and the volume displacement will increase as well However the applied electrical field cannot exceed a certain limit or the PZT material will be depolarized This limit of the PZT-5H used in our prototype is about 8 kVcm and for a PZT ring with a thickness of 03 mm the maximum applied voltage should be about 240 V Higher driving voltage also means a larger power consumption The comparison of the deflection distributions along the radius obtained by difshyferent methods is already shown in Fig 6 In general all
471 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 12 Design graph of the micropump housing
Fig 13 Measured center deflection of the micropump diaphragm under different applied voltage (without liquid loading)
the deflection curves show the similar variation trend and the theoretical result is closer to the experimental result quantitatively
The other important factor that can influence the pershyformance of the pump is the driving frequency For the case without liquid loading two methods are used to meashysure the frequency response of the pump actuator One is to measure the center deflection under different driving frequency and the other is to measure the impedance specshytroscopy of this actuator For comparison the numerical results also are obtained by using the commercial FEM package ANSYS 61 As shown in Fig 14 the first resoshynant frequency appears at several kilohertz in which the deflection reaches the maximum value Both resonant freshyquencies obtained by experimental methods are very close and the numerical one is much higher
Fig 14 Frequency response of the micropump obtained by different methods (without liquid loading)
As shown in Fig 15 for the case with water loading the relationship between the center deflection and the applied voltage is also linear In this measurement the applied voltage is sinusoidal and the driving frequency is 200 Hz When applying a sinusoidal alternating current (AC) voltshyage to the actuator the measured deflection signal is also sinusoidal with the same frequency as the driving voltage And a phase shift is observed between the deflection and the applied voltage that may be partly attributed to the hysteresis In Fig 15 only the amplitude of the deflection is shown The frequency responses of the micropump with water loading also are evaluated by both center deflection and impedance spectroscopy From Fig 16 it is found that the results obtained by both methods are very close and
472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

468 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 7 Relationship between the proportional coefficient kU and the passive plate Youngrsquos modulus Ep
CL Accordingly there also are two different ξ values the pressure loss coefficient in positive direction is represented by ξpositive and the pressure loss coefficient in negative direction is represented by ξnegative
As mentioned before it is assumed that the effect of the pressure difference on the volume change is negligible and thus only the volume change induced by applied voltage is considered Also assume that the pressures outside the inlet and outlet are all equal to the atmospheric pressure Given these assumptions the equations from [21] can be used to obtain the analytical solutions for the flow rate
The average net flow rate then is given by
1 kU Umω CH minus CL kU Umω η 2 minus 1
Q = = 1π CH + CL π η 2 + 1 (18)
where 2
ξnegative CHη = =
ξpositive CL
For the miniaturized DMFC power system using a micropump the power to drive the micropump comes from the total power generated by the fuel cell system itself Therefore it is very important to estimate how much enshyergy the micropump needs to consume Electrically the bending-piezoelectric actuator behaves like a planar capacshyitor The electric capacitance under the given mechanical boundary condition is very complicated In a similar case [29] the capacitance of a circular disk-type PZT actuator with clamped edges has been given by
εT 233πa2
Ce = 1 minus 1 minus hpzt 1 minus v( )2
E )23 s11 sphp2hpzt (hp + hpzt
K2 (19) 31ShB31
Fig 8 Coefficient kU (solid curves from top to bottom RiRo = 01 02 03 and 04) and kU
2 C0 (dashed curves from top to bottom RiRo = 01 02 03 and 04) at different PZTpassive plate radius ratio
where εT E is the 33 is the permittivity of the PZT disk s11 elastic compliance of the PZT disk at constant electric field sp is the elastic compliance of the passive layer K31
is the electromechanical coupling coefficient of the PZT disk and v is the Poissonrsquos ratio In [29] it is assumed that the Poissonrsquos ratio of the PZT disk is the same as that of the passive plate and the effect of the bonding layer on the capacitance is neglected The equations for the other
Etwo parameters are Sh = hpztsp + hps11 and 2 E EB31 = hpzt
4 sp + 4s11sphphpzt 3 + 6s11sphp
2hpzt 2 ( )2E E+ 4s11sph
3 phpzt + h4
p s11
The term outside the parenthesis of (19) is actually the capacitance of piezoelectric layer with free boundary condition It is found that the capacitance with clampedshyboundary condition is about 10 to 30 less than the capacshyitance with free-boundary condition Although the boundshyary condition of the pump actuator in this study is not exactly the same as that of [29] the results of two cases should be close For approximation the capacitance with free-boundary condition is used here because the resultant estimation of the pump power consumption will be larger which should be safer for the system design The capacishytance with free-boundary condition is described as
Permittivity times Area C0 = (20)
Thickness
For the ring-type bending actuator ( )εT R2 minus R2 33π o iC0 = (21)
hpzt
Suppose the applied voltage is sinusoidal that is
U(t) = Um sin(ωt) (22)
The current then is dU(t)
i(t) = C0 (23) dt
469 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 9 Coefficient kU and k2 C0 at different passive plate radius U with fixed PZTpassive plate radius ratio
So the instantaneous power consumption is given by
Welec = i(t)U(t) = 1 ωC0U
2 sin(2ωt) (24) m2
It should be noted that as a capacitor the piezoelectric actuator would store a large portion of the input electrishycal energy therefore only part of the input energy can be converted into output mechanical energy for fuel delivery The stored energy will remain in the driving circuit and will be used in the next driving cycle For the worst case the maximum value of Welec is chosen to estimate the efshyficiency of the whole fuel cell system Combining (18) and (24) by eliminating Um we have
πCo η12 + 1 2
2 max Welec = Q (25)
4k2 f η12 minus 1U
where f is the frequency of the driving voltage As shown in (25) the maximum power consumption is
proportional to the capacitance C0 and the square of the average net flow rate Q It also is inversely proportional to the driving frequency f and the square of kU The effect of the nozzlediffuser element is represented by the coefshyficient η The larger this coefficient is the less the power consumption is Q and f are operational parameters C0
and kU depend on the dimensions and material properties of the pump actuator In the following analysis k2 C0 isU considered as a figure-of-merit that can be used to evaluate the performance of the micropump The larger this paramshyeter is the smaller the power consumed by the micropump will be For the miniaturized DMFC power system driven by the micropump it is also very important to keep this micropump power consumption as small as possible while delivering enough fuel flow rate for fuel cell reaction
IV Optimization of Design Parameters Based on Theoretical Analysis
Both the passive layer and the active layer of the microshypump can be made of various materials Also the thickness
Fig 10 Coefficient kU and k2 C0 at different PZT layer thickness U
and the radius of each layer may be different It is possible to optimize the micropump design based on the theoretishycal analysis Two objectives can be used for optimization One is the average net flow rate If the driving voltage and its frequency are fixed based on (18) a larger kU is preferred so that a larger flow rate can be obtained The other objective is the power consumption It is shown in (25) that given the driving frequency and the flow rate a larger k2 C0 is preferred so that the power required to U drive the micropump is smaller Both factors will be evalshyuated in the following analysis
It is necessary to verify the analytical solutions as many assumptions and simplifications have been made during the derivation Here both numerical and experimental reshysults are used to compare with the theoretical results for the ring-type bending actuator The numerical results are obtained by using the commercial FEM package (ANSYS 61 ANSYS Inc) to calculate a wedge-shaped part of the pump actuator with fixing and symmetric boundary conshyditions A three-dimensional (3-D) tetrahedral structural solid element type Solid-92 is chosen to model the passhysive plate and a 3-D tetrahedral coupled-field solid eleshyment type Solid-98 is chosen to model the PZT layer The bonding layer also is neglected The total number of the elements in this model is 2753 The experimental data are measured from a ring-type bending actuator The photo of the micropump prototype driving by this actuator is shown in Fig 5 The material properties and dimensions of this prototype are listed in Table I The applied voltage is 100 V
The comparison of the deflection data obtained by three different methods is shown in Fig 6 For both numerical results and experimental results the maximum deflection appears at the center of the pump actuator Theoretical results are closer to the experimental results however the maximum deflection does not appear at the center This probably means the linear approximation during the theoshyretical derivation does not fit well with the real case Also note that due to the imperfect clamping at the outer edge of the actuator diaphragm the experimental results do not converge to zero at the boundary There are other possible
470 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 11 Coefficient and 2 kU k C0 at different passivePZT U layer thickness ratio with fixed PZT layer thickness
reasons that result in the discrepancy among the results obtained by three different methods As mentioned before the numerical model is using a 3-D structural solid element so stresses and strains in other directions also are conshysidered The theoretical model is based on pure bending assumption and linearization simplification is used The factors that may affect the experimental results are even more complicated including the fabrication defects residshyual stress materials imperfection etc Still from Fig 6 it is shown that both numerical and theoretical methods can provide fair estimations
Based on the theoretical model Figs 7ndash11 are obtained to illustrate the possible factors that can affect the perforshymance of the micropump
Fig 7 shows how the material property of the passive plate can affect the performance of the ring-type bending actuator Increasing the Youngrsquos modulus of the passive plate will reduce kU Therefore it is preferable to choose a passive plate with smaller Youngrsquos modulus so that a larger flow rate can be obtained In addition because there is no connection between the capacitance and the Youngrsquos modulus the variation trend of k2 C0 should be the same U as that of kU
In Fig 8 the solid curves represent kU (from top to botshytom RiRo = 01 02 03 and 04) and the dot curves repshyresent k2 C0 (from top to bottom RiRo = 01 02 03 U and 04) So it is obvious that increasing the innerouter radius ratio of the PZT ring will reduce both kU and k2 C0 Increasing Ri will reduce the capacitance how-U ever it also will reduce the deflection at the same time As a whole k2 C0 is decreasing when Ri is increasing U Also an optimal PZTpassive plate radius ratio exists for both kU and k2 C0 The optimal ratio for kU (about 08) U is larger than the optimal ratio for k2 C0 (about 07) be-U cause a larger PZT ring radius results in a larger capacshyitance Keeping both the innerouter radius ratio of the PZT ring and the PZTpassive plate radius ratio fixed the curves of both kU and k2 C0 as a function of the U passive plate radius can be obtained As shown in Fig 9
increasing the radius of the passive plate will increase both kU and k2 C0U
The effect of the thicknesses on the performance of the pump actuator is depicted in Figs 10 and 11 The optimal thickness of the PZT ring exists for both kU and k2 C0U Because a smaller PZT ring thickness leads to a larger capacitance the value of the optimal PZT ring thickness for k2 C0 (about 025 mm) is larger than the value of the U optimal thickness for kU (about 01 mm) By keeping the thickness of the PZT ring fixed it also can be found that the optimal PZTpassive plate thickness ratio exists for both kU and k2 C0 Because the thickness of the passive U plate will not affect the capacitance the values of both optimal thickness ratios are the same and about 03 in this case
V Experimental Characterization
As mentioned earlier a micropump prototype driving by the ring-type bending actuator has been fabricated in our lab Not all of the design parameters of the prototype are optimal due to the limitations of the experimental conshyditions and the available materials To fabricate the thin PZT ring first a PZT ring with a thickness of 08 mm is cut from a thicker PZT ring using the dicing saw then this PZT ring is ground to the specific thickness After that the top and bottom surfaces of the PZT ring are coated with a thin gold electrode layer using a sputter-coater device The thin stainless steel disk is bought from McMaster-Carr Supply Company Elmhurst IL The PZT ring is bonded onto the stainless steel disk using epoxy Two very thin bare copper wires are connected to the two electrodes of this ring-type bonding actuator using conductive epoxy The pump housing is made of hard transparent plastic material By bonding the ring-type bending actuator onto the pump housing with epoxy the valveless piezoelectric micropump is finally obtained Fig 12 shows the top and cross section of the pump housing
An MTI 2000 Fotonic Sensor (MTI Instruments Inc Albany NY) is used to measure the deflection of the proshytotype As shown in Fig 13 the relationship between the center deflection of the prototype (without liquid loading) and the applied voltage is almost linear This linear reshylationship also is predicted by the theoretical analysis alshythough a certain difference exists between the values of the experimental results and those of the theoretical results Basically increasing the applied voltage will increase the applied electrical field therefore the deflection and the volume displacement will increase as well However the applied electrical field cannot exceed a certain limit or the PZT material will be depolarized This limit of the PZT-5H used in our prototype is about 8 kVcm and for a PZT ring with a thickness of 03 mm the maximum applied voltage should be about 240 V Higher driving voltage also means a larger power consumption The comparison of the deflection distributions along the radius obtained by difshyferent methods is already shown in Fig 6 In general all
471 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 12 Design graph of the micropump housing
Fig 13 Measured center deflection of the micropump diaphragm under different applied voltage (without liquid loading)
the deflection curves show the similar variation trend and the theoretical result is closer to the experimental result quantitatively
The other important factor that can influence the pershyformance of the pump is the driving frequency For the case without liquid loading two methods are used to meashysure the frequency response of the pump actuator One is to measure the center deflection under different driving frequency and the other is to measure the impedance specshytroscopy of this actuator For comparison the numerical results also are obtained by using the commercial FEM package ANSYS 61 As shown in Fig 14 the first resoshynant frequency appears at several kilohertz in which the deflection reaches the maximum value Both resonant freshyquencies obtained by experimental methods are very close and the numerical one is much higher
Fig 14 Frequency response of the micropump obtained by different methods (without liquid loading)
As shown in Fig 15 for the case with water loading the relationship between the center deflection and the applied voltage is also linear In this measurement the applied voltage is sinusoidal and the driving frequency is 200 Hz When applying a sinusoidal alternating current (AC) voltshyage to the actuator the measured deflection signal is also sinusoidal with the same frequency as the driving voltage And a phase shift is observed between the deflection and the applied voltage that may be partly attributed to the hysteresis In Fig 15 only the amplitude of the deflection is shown The frequency responses of the micropump with water loading also are evaluated by both center deflection and impedance spectroscopy From Fig 16 it is found that the results obtained by both methods are very close and
472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

469 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 9 Coefficient kU and k2 C0 at different passive plate radius U with fixed PZTpassive plate radius ratio
So the instantaneous power consumption is given by
Welec = i(t)U(t) = 1 ωC0U
2 sin(2ωt) (24) m2
It should be noted that as a capacitor the piezoelectric actuator would store a large portion of the input electrishycal energy therefore only part of the input energy can be converted into output mechanical energy for fuel delivery The stored energy will remain in the driving circuit and will be used in the next driving cycle For the worst case the maximum value of Welec is chosen to estimate the efshyficiency of the whole fuel cell system Combining (18) and (24) by eliminating Um we have
πCo η12 + 1 2
2 max Welec = Q (25)
4k2 f η12 minus 1U
where f is the frequency of the driving voltage As shown in (25) the maximum power consumption is
proportional to the capacitance C0 and the square of the average net flow rate Q It also is inversely proportional to the driving frequency f and the square of kU The effect of the nozzlediffuser element is represented by the coefshyficient η The larger this coefficient is the less the power consumption is Q and f are operational parameters C0
and kU depend on the dimensions and material properties of the pump actuator In the following analysis k2 C0 isU considered as a figure-of-merit that can be used to evaluate the performance of the micropump The larger this paramshyeter is the smaller the power consumed by the micropump will be For the miniaturized DMFC power system driven by the micropump it is also very important to keep this micropump power consumption as small as possible while delivering enough fuel flow rate for fuel cell reaction
IV Optimization of Design Parameters Based on Theoretical Analysis
Both the passive layer and the active layer of the microshypump can be made of various materials Also the thickness
Fig 10 Coefficient kU and k2 C0 at different PZT layer thickness U
and the radius of each layer may be different It is possible to optimize the micropump design based on the theoretishycal analysis Two objectives can be used for optimization One is the average net flow rate If the driving voltage and its frequency are fixed based on (18) a larger kU is preferred so that a larger flow rate can be obtained The other objective is the power consumption It is shown in (25) that given the driving frequency and the flow rate a larger k2 C0 is preferred so that the power required to U drive the micropump is smaller Both factors will be evalshyuated in the following analysis
It is necessary to verify the analytical solutions as many assumptions and simplifications have been made during the derivation Here both numerical and experimental reshysults are used to compare with the theoretical results for the ring-type bending actuator The numerical results are obtained by using the commercial FEM package (ANSYS 61 ANSYS Inc) to calculate a wedge-shaped part of the pump actuator with fixing and symmetric boundary conshyditions A three-dimensional (3-D) tetrahedral structural solid element type Solid-92 is chosen to model the passhysive plate and a 3-D tetrahedral coupled-field solid eleshyment type Solid-98 is chosen to model the PZT layer The bonding layer also is neglected The total number of the elements in this model is 2753 The experimental data are measured from a ring-type bending actuator The photo of the micropump prototype driving by this actuator is shown in Fig 5 The material properties and dimensions of this prototype are listed in Table I The applied voltage is 100 V
The comparison of the deflection data obtained by three different methods is shown in Fig 6 For both numerical results and experimental results the maximum deflection appears at the center of the pump actuator Theoretical results are closer to the experimental results however the maximum deflection does not appear at the center This probably means the linear approximation during the theoshyretical derivation does not fit well with the real case Also note that due to the imperfect clamping at the outer edge of the actuator diaphragm the experimental results do not converge to zero at the boundary There are other possible
470 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 11 Coefficient and 2 kU k C0 at different passivePZT U layer thickness ratio with fixed PZT layer thickness
reasons that result in the discrepancy among the results obtained by three different methods As mentioned before the numerical model is using a 3-D structural solid element so stresses and strains in other directions also are conshysidered The theoretical model is based on pure bending assumption and linearization simplification is used The factors that may affect the experimental results are even more complicated including the fabrication defects residshyual stress materials imperfection etc Still from Fig 6 it is shown that both numerical and theoretical methods can provide fair estimations
Based on the theoretical model Figs 7ndash11 are obtained to illustrate the possible factors that can affect the perforshymance of the micropump
Fig 7 shows how the material property of the passive plate can affect the performance of the ring-type bending actuator Increasing the Youngrsquos modulus of the passive plate will reduce kU Therefore it is preferable to choose a passive plate with smaller Youngrsquos modulus so that a larger flow rate can be obtained In addition because there is no connection between the capacitance and the Youngrsquos modulus the variation trend of k2 C0 should be the same U as that of kU
In Fig 8 the solid curves represent kU (from top to botshytom RiRo = 01 02 03 and 04) and the dot curves repshyresent k2 C0 (from top to bottom RiRo = 01 02 03 U and 04) So it is obvious that increasing the innerouter radius ratio of the PZT ring will reduce both kU and k2 C0 Increasing Ri will reduce the capacitance how-U ever it also will reduce the deflection at the same time As a whole k2 C0 is decreasing when Ri is increasing U Also an optimal PZTpassive plate radius ratio exists for both kU and k2 C0 The optimal ratio for kU (about 08) U is larger than the optimal ratio for k2 C0 (about 07) be-U cause a larger PZT ring radius results in a larger capacshyitance Keeping both the innerouter radius ratio of the PZT ring and the PZTpassive plate radius ratio fixed the curves of both kU and k2 C0 as a function of the U passive plate radius can be obtained As shown in Fig 9
increasing the radius of the passive plate will increase both kU and k2 C0U
The effect of the thicknesses on the performance of the pump actuator is depicted in Figs 10 and 11 The optimal thickness of the PZT ring exists for both kU and k2 C0U Because a smaller PZT ring thickness leads to a larger capacitance the value of the optimal PZT ring thickness for k2 C0 (about 025 mm) is larger than the value of the U optimal thickness for kU (about 01 mm) By keeping the thickness of the PZT ring fixed it also can be found that the optimal PZTpassive plate thickness ratio exists for both kU and k2 C0 Because the thickness of the passive U plate will not affect the capacitance the values of both optimal thickness ratios are the same and about 03 in this case
V Experimental Characterization
As mentioned earlier a micropump prototype driving by the ring-type bending actuator has been fabricated in our lab Not all of the design parameters of the prototype are optimal due to the limitations of the experimental conshyditions and the available materials To fabricate the thin PZT ring first a PZT ring with a thickness of 08 mm is cut from a thicker PZT ring using the dicing saw then this PZT ring is ground to the specific thickness After that the top and bottom surfaces of the PZT ring are coated with a thin gold electrode layer using a sputter-coater device The thin stainless steel disk is bought from McMaster-Carr Supply Company Elmhurst IL The PZT ring is bonded onto the stainless steel disk using epoxy Two very thin bare copper wires are connected to the two electrodes of this ring-type bonding actuator using conductive epoxy The pump housing is made of hard transparent plastic material By bonding the ring-type bending actuator onto the pump housing with epoxy the valveless piezoelectric micropump is finally obtained Fig 12 shows the top and cross section of the pump housing
An MTI 2000 Fotonic Sensor (MTI Instruments Inc Albany NY) is used to measure the deflection of the proshytotype As shown in Fig 13 the relationship between the center deflection of the prototype (without liquid loading) and the applied voltage is almost linear This linear reshylationship also is predicted by the theoretical analysis alshythough a certain difference exists between the values of the experimental results and those of the theoretical results Basically increasing the applied voltage will increase the applied electrical field therefore the deflection and the volume displacement will increase as well However the applied electrical field cannot exceed a certain limit or the PZT material will be depolarized This limit of the PZT-5H used in our prototype is about 8 kVcm and for a PZT ring with a thickness of 03 mm the maximum applied voltage should be about 240 V Higher driving voltage also means a larger power consumption The comparison of the deflection distributions along the radius obtained by difshyferent methods is already shown in Fig 6 In general all
471 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 12 Design graph of the micropump housing
Fig 13 Measured center deflection of the micropump diaphragm under different applied voltage (without liquid loading)
the deflection curves show the similar variation trend and the theoretical result is closer to the experimental result quantitatively
The other important factor that can influence the pershyformance of the pump is the driving frequency For the case without liquid loading two methods are used to meashysure the frequency response of the pump actuator One is to measure the center deflection under different driving frequency and the other is to measure the impedance specshytroscopy of this actuator For comparison the numerical results also are obtained by using the commercial FEM package ANSYS 61 As shown in Fig 14 the first resoshynant frequency appears at several kilohertz in which the deflection reaches the maximum value Both resonant freshyquencies obtained by experimental methods are very close and the numerical one is much higher
Fig 14 Frequency response of the micropump obtained by different methods (without liquid loading)
As shown in Fig 15 for the case with water loading the relationship between the center deflection and the applied voltage is also linear In this measurement the applied voltage is sinusoidal and the driving frequency is 200 Hz When applying a sinusoidal alternating current (AC) voltshyage to the actuator the measured deflection signal is also sinusoidal with the same frequency as the driving voltage And a phase shift is observed between the deflection and the applied voltage that may be partly attributed to the hysteresis In Fig 15 only the amplitude of the deflection is shown The frequency responses of the micropump with water loading also are evaluated by both center deflection and impedance spectroscopy From Fig 16 it is found that the results obtained by both methods are very close and
472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

470 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 11 Coefficient and 2 kU k C0 at different passivePZT U layer thickness ratio with fixed PZT layer thickness
reasons that result in the discrepancy among the results obtained by three different methods As mentioned before the numerical model is using a 3-D structural solid element so stresses and strains in other directions also are conshysidered The theoretical model is based on pure bending assumption and linearization simplification is used The factors that may affect the experimental results are even more complicated including the fabrication defects residshyual stress materials imperfection etc Still from Fig 6 it is shown that both numerical and theoretical methods can provide fair estimations
Based on the theoretical model Figs 7ndash11 are obtained to illustrate the possible factors that can affect the perforshymance of the micropump
Fig 7 shows how the material property of the passive plate can affect the performance of the ring-type bending actuator Increasing the Youngrsquos modulus of the passive plate will reduce kU Therefore it is preferable to choose a passive plate with smaller Youngrsquos modulus so that a larger flow rate can be obtained In addition because there is no connection between the capacitance and the Youngrsquos modulus the variation trend of k2 C0 should be the same U as that of kU
In Fig 8 the solid curves represent kU (from top to botshytom RiRo = 01 02 03 and 04) and the dot curves repshyresent k2 C0 (from top to bottom RiRo = 01 02 03 U and 04) So it is obvious that increasing the innerouter radius ratio of the PZT ring will reduce both kU and k2 C0 Increasing Ri will reduce the capacitance how-U ever it also will reduce the deflection at the same time As a whole k2 C0 is decreasing when Ri is increasing U Also an optimal PZTpassive plate radius ratio exists for both kU and k2 C0 The optimal ratio for kU (about 08) U is larger than the optimal ratio for k2 C0 (about 07) be-U cause a larger PZT ring radius results in a larger capacshyitance Keeping both the innerouter radius ratio of the PZT ring and the PZTpassive plate radius ratio fixed the curves of both kU and k2 C0 as a function of the U passive plate radius can be obtained As shown in Fig 9
increasing the radius of the passive plate will increase both kU and k2 C0U
The effect of the thicknesses on the performance of the pump actuator is depicted in Figs 10 and 11 The optimal thickness of the PZT ring exists for both kU and k2 C0U Because a smaller PZT ring thickness leads to a larger capacitance the value of the optimal PZT ring thickness for k2 C0 (about 025 mm) is larger than the value of the U optimal thickness for kU (about 01 mm) By keeping the thickness of the PZT ring fixed it also can be found that the optimal PZTpassive plate thickness ratio exists for both kU and k2 C0 Because the thickness of the passive U plate will not affect the capacitance the values of both optimal thickness ratios are the same and about 03 in this case
V Experimental Characterization
As mentioned earlier a micropump prototype driving by the ring-type bending actuator has been fabricated in our lab Not all of the design parameters of the prototype are optimal due to the limitations of the experimental conshyditions and the available materials To fabricate the thin PZT ring first a PZT ring with a thickness of 08 mm is cut from a thicker PZT ring using the dicing saw then this PZT ring is ground to the specific thickness After that the top and bottom surfaces of the PZT ring are coated with a thin gold electrode layer using a sputter-coater device The thin stainless steel disk is bought from McMaster-Carr Supply Company Elmhurst IL The PZT ring is bonded onto the stainless steel disk using epoxy Two very thin bare copper wires are connected to the two electrodes of this ring-type bonding actuator using conductive epoxy The pump housing is made of hard transparent plastic material By bonding the ring-type bending actuator onto the pump housing with epoxy the valveless piezoelectric micropump is finally obtained Fig 12 shows the top and cross section of the pump housing
An MTI 2000 Fotonic Sensor (MTI Instruments Inc Albany NY) is used to measure the deflection of the proshytotype As shown in Fig 13 the relationship between the center deflection of the prototype (without liquid loading) and the applied voltage is almost linear This linear reshylationship also is predicted by the theoretical analysis alshythough a certain difference exists between the values of the experimental results and those of the theoretical results Basically increasing the applied voltage will increase the applied electrical field therefore the deflection and the volume displacement will increase as well However the applied electrical field cannot exceed a certain limit or the PZT material will be depolarized This limit of the PZT-5H used in our prototype is about 8 kVcm and for a PZT ring with a thickness of 03 mm the maximum applied voltage should be about 240 V Higher driving voltage also means a larger power consumption The comparison of the deflection distributions along the radius obtained by difshyferent methods is already shown in Fig 6 In general all
471 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 12 Design graph of the micropump housing
Fig 13 Measured center deflection of the micropump diaphragm under different applied voltage (without liquid loading)
the deflection curves show the similar variation trend and the theoretical result is closer to the experimental result quantitatively
The other important factor that can influence the pershyformance of the pump is the driving frequency For the case without liquid loading two methods are used to meashysure the frequency response of the pump actuator One is to measure the center deflection under different driving frequency and the other is to measure the impedance specshytroscopy of this actuator For comparison the numerical results also are obtained by using the commercial FEM package ANSYS 61 As shown in Fig 14 the first resoshynant frequency appears at several kilohertz in which the deflection reaches the maximum value Both resonant freshyquencies obtained by experimental methods are very close and the numerical one is much higher
Fig 14 Frequency response of the micropump obtained by different methods (without liquid loading)
As shown in Fig 15 for the case with water loading the relationship between the center deflection and the applied voltage is also linear In this measurement the applied voltage is sinusoidal and the driving frequency is 200 Hz When applying a sinusoidal alternating current (AC) voltshyage to the actuator the measured deflection signal is also sinusoidal with the same frequency as the driving voltage And a phase shift is observed between the deflection and the applied voltage that may be partly attributed to the hysteresis In Fig 15 only the amplitude of the deflection is shown The frequency responses of the micropump with water loading also are evaluated by both center deflection and impedance spectroscopy From Fig 16 it is found that the results obtained by both methods are very close and
472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

471 zhang and wang valveless micropump and ring-type piezoelectric actuator
Fig 12 Design graph of the micropump housing
Fig 13 Measured center deflection of the micropump diaphragm under different applied voltage (without liquid loading)
the deflection curves show the similar variation trend and the theoretical result is closer to the experimental result quantitatively
The other important factor that can influence the pershyformance of the pump is the driving frequency For the case without liquid loading two methods are used to meashysure the frequency response of the pump actuator One is to measure the center deflection under different driving frequency and the other is to measure the impedance specshytroscopy of this actuator For comparison the numerical results also are obtained by using the commercial FEM package ANSYS 61 As shown in Fig 14 the first resoshynant frequency appears at several kilohertz in which the deflection reaches the maximum value Both resonant freshyquencies obtained by experimental methods are very close and the numerical one is much higher
Fig 14 Frequency response of the micropump obtained by different methods (without liquid loading)
As shown in Fig 15 for the case with water loading the relationship between the center deflection and the applied voltage is also linear In this measurement the applied voltage is sinusoidal and the driving frequency is 200 Hz When applying a sinusoidal alternating current (AC) voltshyage to the actuator the measured deflection signal is also sinusoidal with the same frequency as the driving voltage And a phase shift is observed between the deflection and the applied voltage that may be partly attributed to the hysteresis In Fig 15 only the amplitude of the deflection is shown The frequency responses of the micropump with water loading also are evaluated by both center deflection and impedance spectroscopy From Fig 16 it is found that the results obtained by both methods are very close and
472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

472 ieee transactions on ultrasonics ferroelectrics and frequency control vol 53 no 2 february 2006
Fig 15 Measured center deflection of the micropump diaphragm under different applied voltage (with liquid loading)
Fig 16 Frequency response of the micropump obtained by different methods (with liquid loading)
the resonance frequency is about 200 Hz which is far less than the case without water loading
To measure the water flow rate two water containers are connected to the inlet and outlet of the micropump separately By measuring the movement of the water surshyface in the containers with respect to time the average flow rate and the corresponding pressure head can be obshytained The results are shown in Fig 17 The larger flow rate corresponds to the lower pressure head Using this micropump a flow rate of 5 mlminute at 1 kPa can be delivered when applying a 100 V voltage with a driving freshyquency of 200 Hz and 200 Hz is the resonance frequency of the micropump with water loading and the performance is the best under this driving frequency The maximum value of the measured capacitance is about 822 nF and it can
Fig 17 Measured flow rate versus pressure head (pumping fluid is water)
be estimated that the power consumption should be about 50 mW This flow rate is adequate to support the operation of a 1 W fuel cell assembly and the power consumption of the micropump occupies only a small portion of the total power generated by the fuel cell [26] In the actual opershyation of the fuel cell integrated with micropump a direct current (DC)-AC conversion system is required to drive the micropump And it may be more convenient to use a square wave AC instead of sine AC
VI Conclusions
As a fluid delivery method a valveless micropump drivshying by a ring-type piezoelectric-bending actuator is deshyveloped A theoretical model is established to estimate the deflection volume change flow rate and power conshysumption of the micropump The validity of the theoretishycal model is verified by both numerical and experimental methods An important use of this model is to optimize the micropump design parameters including material propershyties and structure dimensions It can be found that increasshying the Youngrsquos modulus of the PZT disk or decreasing the Youngrsquos modulus of the passive plate will be favorable for both flow rate and power consumption A larger diameter PZT layer also is preferred As for the thickness of the PZT layer PZTpassive plate thickness ratio and PZTpassive plate radius ratio optimal values exist Furthermore a micropump prototype is fabricated and tested A linear reshylationship can be observed between the deflection and the applied voltage for both the case without liquid loading and the case with liquid loading The resonant frequency is in the range of several kilohertz without liquid loading and is about 200 Hz with liquid loading A flow rate of 5 mlminute at 1 kPa can be reached when the pumping fluid is water In the future the designs with optimal pashyrameters will be fabricated so that the performance can be
473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society

473 zhang and wang valveless micropump and ring-type piezoelectric actuator
improved Also required is the modeling work to predict the more complicated behavior of the micropump operashytion with liquid loading
References
[1] P Gravesen J Brandebjerg and O S Jensen ldquoMicrofluidicsmdash A reviewrdquo J Micromech Microeng vol 4 pp 168ndash182 1993
[2] D J Laser and J G Santiago ldquoA review of micropumpsrdquo J Micromech Microeng vol 14 pp R35ndashR64 2004
[3] H T G Van Lintel F C M van den Pol and S Bouwstra ldquoA piezoelectric micropump based on micromachining in silishyconrdquo Sens Actuators vol 15 pp 153ndash167 1988
[4] E Stemme and G Stemme ldquoA valveless diffusernozzle-based fluid pumprdquo Sens Actuators A vol 39 pp 159ndash167 1993
[5] A Olsson G Stemme and E Stemme ldquoA valveless planar fluid pump with two pump chambersrdquo Sens Actuators A vol 46-47 pp 549ndash556 1995
[6] A Olsson P Enoksson G Stemme and E Stemme ldquoA valveshyless planar pump isotropically etched in siliconrdquo J Micromech Microeng vol 6 pp 87ndash91 1996
[7] A Olsson P Enoksson G Stemme and E Stemme ldquoMicroshymachined flat-walled valveless diffuser pumpsrdquo J Microelecshytromech Syst vol 6 no 2 pp 161ndash166 1997
[8] A Olsson G Stemme and E Stemme ldquoDiffuser-element design investigation for valveless pumpsrdquo Sens Actuators A vol 57 pp 137ndash143 1996
[9] A Olsson G Stemme and E Stemme ldquoA numerical deshysign study of the valveless diffuser pump using a lumped-mass modelrdquo J Micromech Microeng vol 9 pp 34ndash44 1999
[10] A Olsson G Stemme and E Stemme ldquoNumerical and exshyperimental studies of flat-walled diffuser elements for valveless micropumprdquo Sens Actuators A vol 84 pp 165ndash175 2000
[11] A Olsson ldquoValve-less diffuser micropumpsrdquo PhD dissertation Royal Institute of Technology Stockholm Sweden 1998
[12] T Gerlach M Schuenemann and H Wurmus ldquoA new microshypump principle of the reciprocating type using pyramidic micro flow channels as passive valvesrdquo J Micromech Microeng vol 5 pp 199ndash201 1995
[13] T Gerlach and H Wurmus ldquoWorking principle and performance of the dynamic micropumprdquo Sens Actuators A vol 50 pp 135ndash140 1995
[14] F K Forster R L Bardell M A Afromowitz N R Sharma and A Blanchard ldquoDesign fabrication and testing of fixed-valve micro-pumpsrdquo in Proc ASME Fluids Eng Division 1995 pp 39ndash44
[15] R L Bardell N R Sharma F K Forster M A Afroshymowitz and R J Penney Designing high-performance microshypumps based on no-moving-parts valves ASME Dynamic Sysshytems and Control Division (DSC) Microelectromechanical Sysshytems (MEMS) vol 62 1997 pp 47ndash53
[16] C J Morris and F K Forster ldquoOptimization of a circular piezoshyelectric bimorph for a micropump driverrdquo J Micromech Microshyeng vol 10 pp 459ndash465 2000
[17] M Koch A G R Evans and A Brunnschweiler ldquoThe dynamic micropump driven with a screen printed PZT actuatorrdquo J Mishycromech Microeng vol 8 pp 119ndash122 1998
[18] N-T Nguyen and X Huang ldquoMiniature valveless pumps based on printed circuit board techniquerdquo Sens Actuators A vol 88 pp 104ndash111 2001
[19] N-T Nguyen and X Huang ldquoNumerical simulation of pulseshywidth-modulated micropumps with diffusernozzle elementsrdquo in Proc Int Conf Modeling Simulation of Microsyst 2000 pp 636ndash639
[20] N-T Nguyen and T-Q Truong ldquoA fully polymeric micropump with piezoelectric actuatorrdquo Sens Actuators B vol 97 pp 137ndash 143 2004
[21] A Ullmann ldquoThe piezoelectric valveless pump-performance enshyhancement analysisrdquo Sens Actuators A vol 69 pp 97ndash105 1998
[22] A Ullmann and I Fono ldquoThe piezoelectric valveless pumpshyimproved dynamic modelrdquo J Microelectromech Syst vol 11 no 6 pp 655ndash664 2002
[23] O T Nedelcu and V Moagar-Poladian ldquoModeling of the piezoshyelectric micropump for improving the working parametersrdquo in
Technical Proc Int Conf Modeling Simulation Microsyst 1999 pp 659ndash662
[24] S Li and S Chen ldquoAnalytical analysis of a circular PZT actuashytor for valveless micropumpsrdquo Sens Actuators A vol 104 pp 151ndash161 2003
[25] M Bu T Melvin G Ensell J S Wilkinson and A G R Evans ldquoDesign and theoretical evaluation of a novel microfluidic device to be used for PCRrdquo J Micromech Microeng vol 13 pp S125ndashS130 2003
[26] T Zhang and Q-M Wang ldquoValveless piezoelectric micropump for fuel delivery in direct methanol fuel cell (DMFC) devicesrdquo J Power Sources vol 140 pp 72ndash80 2005
[27] M R Steel F Harrison and P G Harper ldquoThe piezoelectric bishymorph An experimental and theoretical study of its quasistatic responserdquo J Phys D Appl Phys vol 11 pp 979ndash989 1978
[28] S Timoshenko and S Woinowsky-Krieger Theory of Plates and Shells 2nd ed New York McGraw-Hill 1959
[29] S Kim W W Clark and Q-M Wang ldquoPiezoelectric energy harvesting using a diaphragm structurerdquo Proc SPIE vol 5055 pp 307ndash318 2003
Tao Zhang (Srsquo97ndashMrsquo99) is currently a postshydoctoral fellow in the Department of Surgery at the University of Maryland Baltimore Maryland He received his BS and MS deshygrees in Thermal Engineering from Tsinghua University Beijing China in 1997 and 2000 respectively and PhD degree in Mechanishycal Engineering from the University of Pittsshyburgh Pennsylvania in 2005 Tao Zhangrsquos doctoral research is focused on miniaturized polymer electrolyte membrane (PEM) fuel cells and direct methanol fuel cells (DMFC)
for portable electronics application His research interests include miniaturized power devices micro fluidics piezoelectric microsenshysor and microactuator computational fluid dynamics (CFD) and biomedical devices His recent research focuses on artificial pumpshylung devices cardiac assist devices functional Biosensors and cell mechanics He is a member of IEEE and American Society of Meshychanical Engineering (ASME)
Qing-Ming Wang (Mrsquo00) is an assistant professor in the Department of Mechanical Engineering the University of Pittsburgh Pennsylvania He received the BS and MS degrees in Materials Science and Engineering from Tsinghua University Beijing China in 1987 and 1989 respectively and the PhD deshygree in Materials from the Pennsylvania State University in 1998
Prior to joining the University of Pittsshyburgh Dr Wang was an RampD engineer and materials scientist in Lexmark International
Inc Lexington Kentucky where he worked on piezoelectric and electrostatic microactuators for inkjet printhead development From 1990 to 1992 he worked as a development engineer in a technolshyogy company in Beijing where he participated in the research and development of electronic materials and piezoelectric devices From 1992 to 1994 he was a research assistant in the New Mexico Instishytute of Mining and Technology working on nickel-zinc ferrite and ferritepolymer composites for EMI filter application From 1994 to 1998 he was a graduate assistant in the Materials Research Laborashytory of the Pennsylvania State University working toward his PhD degree in the areas of piezoelectric ceramic actuators for low freshyquency active noise cancellation and vibration damping and thin film materials for microactuator and microsensor applications
Dr Wangrsquos primary research interests are in microelectromechanshyical systems (MEMS) and microfabrication smart materials and piezoelectricelectrostrictive ceramics thin films and composites for electromechanical transducer actuator and sensor applications
He is a member of IEEE IEEE-UFFC the Materials Research Society (MRS) ASME and the American Ceramic Society


![Copyright · Jamil, Mohammad, Qatar University, Qatar ... Iman Shahosseini, ... et al. developed a valveless micropump [3], in which](https://img.pdfslide.us/doc/110x75/5b697af67f8b9adc178e71f3/-jamil-mohammad-qatar-university-qatar-iman-shahosseini-et-al-developed.jpg)