Embed Size (px)
Citation preview

p. 1DSP-II
Digital Signal Processing
FIR Filter Design
Marc Moonen
Dept. E.E./ESAT, K.U.Leuven
FIR Filter Design
• Review of discrete-time systems LTI systems, impulse response, transfer function, ...
• FIR filters
Direct form, Lattice, Linear-phase filters
• FIR design by optimization
Weighted least-squares design
Minimax design
• FIR design using `windows’• Equiripple design• Software (Matlab,…)

Review of discrete-time systems 1/10
Linear time-invariant (LTI) systems
• Linear :
input u1[k] -> output y1[k]
input u2[k] -> output y2[k]
hence input a.u1[k]+b.u2[k]-> a.y1[k]+b.y2[k]
• Time-invariant (shift-invariant)
input u[k] -> output y[k]
hence input u[k-T] -> output y[k-T]
u[k] y[k]

Review of discrete-time systems 2/10
Linear time-invariant (LTI) systems
• Causal systems:
for all input u[k]=0, k<0 -> output y[k]=0, k<0
• Impulse response :
input 1,0,0,0,... -> output h[0],h[1],h[2],h[3],...
input u[0],u[1],u[2],u[3] -> output y[0],y[1],y[2],y[3],...
= `convolution’
u[k] y[k]
][*][][].[][ khkuikhiukyi

Review of discrete-time systems 3/10
• Impulse response/convolution:
][*][][].[][ khkuikhiukyi
]3[
]2[
]1[
]0[
.
]2[000
]1[]2[00
]0[]1[]2[0
0]0[]1[]2[
00]0[]1[
000]0[
]5[
]4[
]3[
]2[
]1[
]0[
u
u
u
u
h
hh
hhh
hhh
hh
h
y
y
y
y
y
y
u[0],u[1],u[2],u[3],0,0…. y[0],y[1],...
h[0],h[1],h[2],0,0,...
`Toeplitz’ matrix

Review of discrete-time systems 4/10
• Z-Transform:
i
izihzH ].[)(
]3[
]2[
]1[
]0[
.
]2[000
]1[]2[00
]0[]1[]2[0
0]0[]1[]2[
00]0[]1[
000]0[
.1
]5[
]4[
]3[
]2[
]1[
]0[
.1
3211).()(
5432154321
u
u
u
u
h
hh
hhh
hhh
hh
h
zzzzz
y
y
y
y
y
y
zzzzz
zzzzHzY
i
iziyzY ].[)( i
iziuzU ].[)(
)().()( zUzHzY

Review of discrete-time systems 5/10
Z-Transform :• input-output relation • `shorthand’ notation
(for convolution operation/Toeplitz-vector product)
• stability
bounded input u[k] -> bounded output y[k]
--iff
--iff poles of H(z) inside the unit circle
(for causal,rational systems)
)().()( zUzHzY
k
kh ][
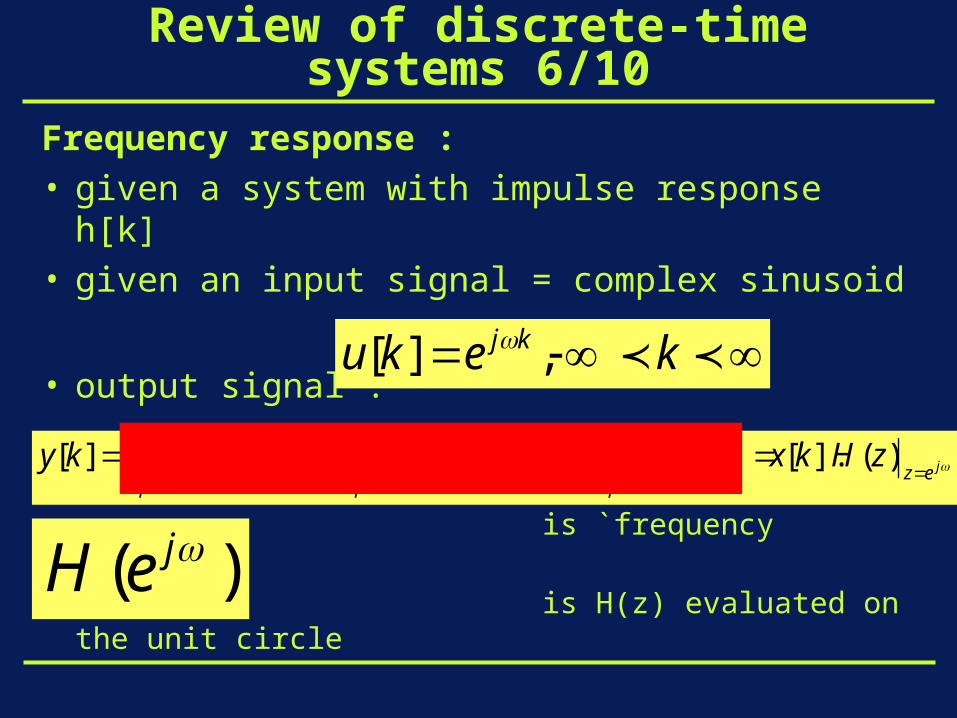
Review of discrete-time systems 6/10
Frequency response :• given a system with impulse response h[k] • given an input signal = complex sinusoid
• output signal :
is `frequency response’
is H(z) evaluated on the unit circle
keku kj ,][
jezi
ijkj
i
ikj
i
zHkxeiheeihikxihky
)(].[].[].[][].[][ )(
)( jeH

Review of discrete-time systems 7/10
Frequency response :• for a real impulse response h[k]
Magnitude response is even function
Phase response is odd function• example :
)( jeH
)( jeH
-4 -2 0 2 40
0.5
1
-4 -2 0 2 4-5
0
5
Nyquist frequency
,...1,1,1,1,1..., kje
Review of discrete-time systems 8/10
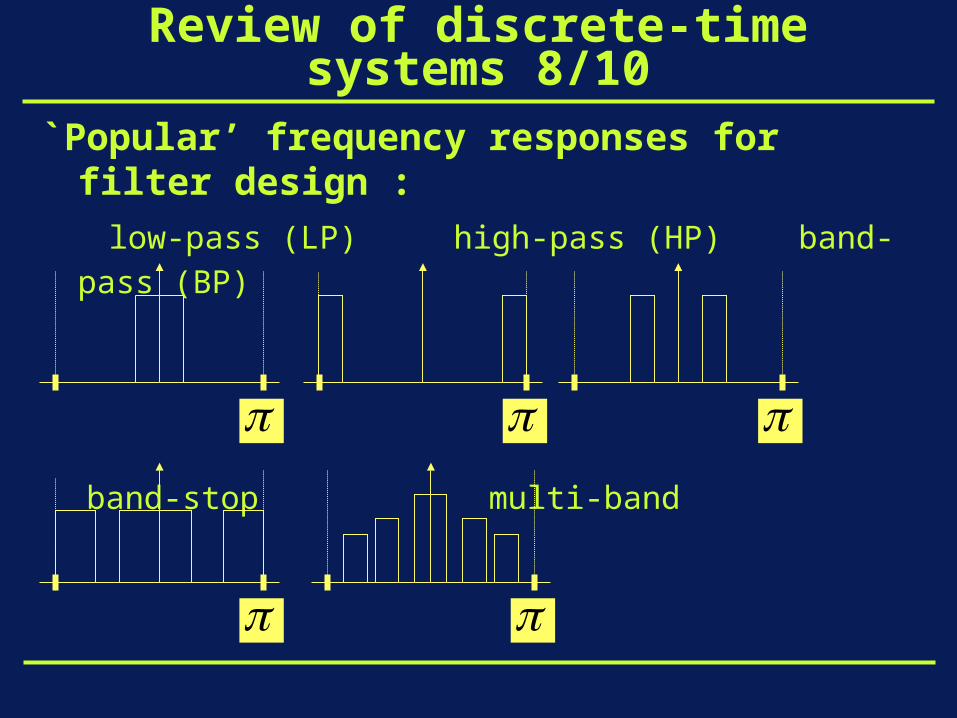
`Popular’ frequency responses for filter design :
low-pass (LP) high-pass (HP) band-pass (BP)
band-stop multi-band

Review of discrete-time systems 9/10
Rational transfer functions (`IIR filters’):•
• N poles (zeros of A(z)) , N zeros (zeros of B(z))• corresponds to difference equation
NN
NN
zaza
zbzbb
zA
zBzH
...1
...
)(
)()(
11
110
][....]1[.][.][....]1[.][ 101 NkubkubkubNkyakyaky NN
][....]1[.][....]1[.][.][ 110 NkyakyaNkubkubkubky NN

Review of discrete-time systems 10/10
`FIR filters’ (finite impulse response):•
• `Moving average filters’ (MA)• N poles at the origin z=0 (hence guaranteed stability) • N zeros (zeros of B(z)), `all zero’ filters• corresponds to difference equation
• impulse response
NN zbzbbzBzH ...)()( 1
10
][....]1[.][.][ 10 Nkubkubkubky N
,...0]1[,][,...,]1[,]0[ 10 NhbNhbhbh N
Review of discrete-time systems
`FIR filter’ (finite impulse response) design
• this lecture +++ : phase control (linear phase)
guaranteed stability
design flexibility
minor coefficient sensitivity/quantization/round-off problems,….
- - - : long filters, hence expensive
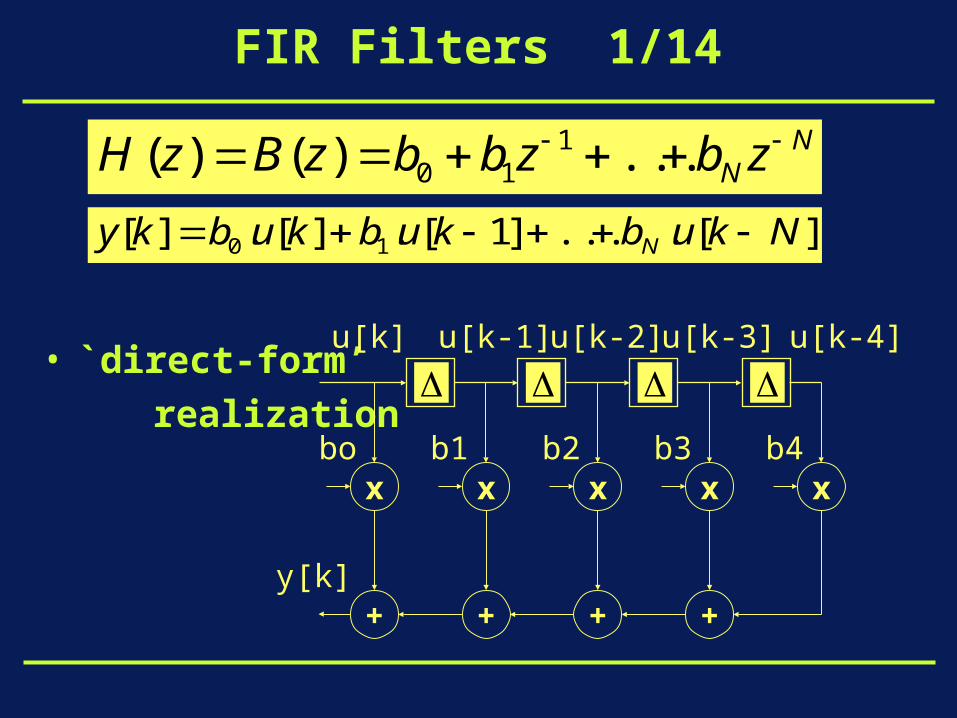
FIR Filters 1/14
• `direct-form’
realization
u[k]
u[k-4]u[k-3]u[k-2]u[k-1]
xbo
+
xb4
xb3
+
xb2
+
xb1
+y[k]
NN zbzbbzBzH ...)()( 1
10
][....]1[.][.][ 10 Nkubkubkubky N
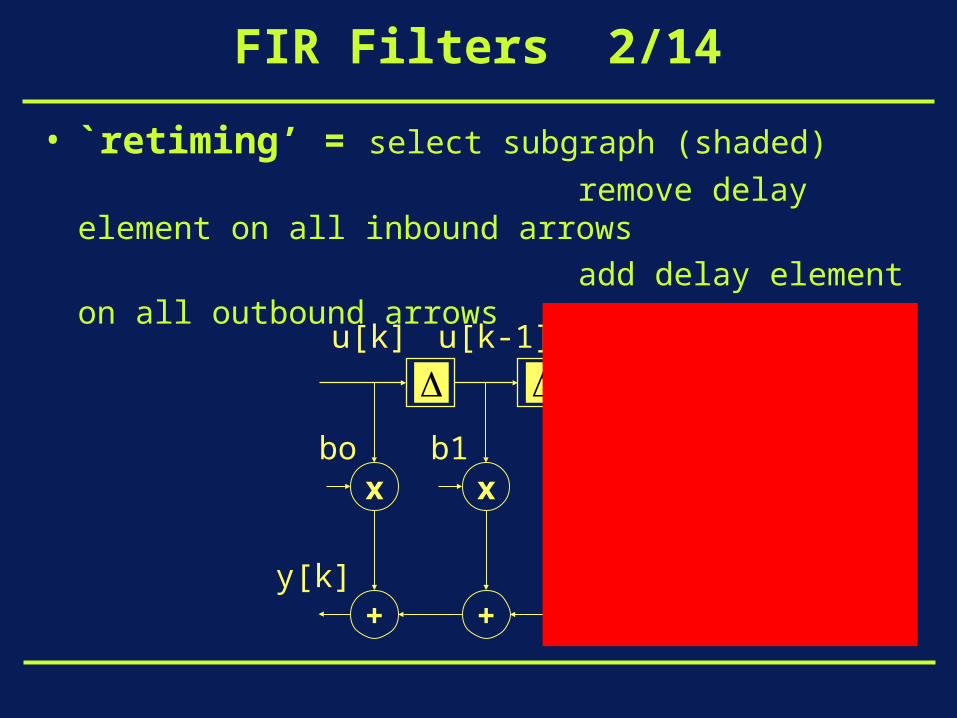
FIR Filters 2/14
• `retiming’ = select subgraph (shaded)
remove delay element on all inbound arrows
add delay element on all outbound arrows
u[k]
u[k-4]u[k-3]u[k-2]u[k-1]
xbo
+
xb4
xb3
+
xb2
+
xb1
+y[k]

FIR Filters 3/14
• `retiming’ : results in...
u[k]
u[k-1]
xbo
+
xb1
+y[k]
u[k-3]u[k-2]
xb4
xb3
+
xb2
+

FIR Filters 4/14
• `retiming’ : repeated application results in...
`Transposed direct-form’ realization
u[k]
xbo
+y[k]
xb1
+
xb2
+
xb3
+
xb4

FIR Filters 5/14
• `Lattice form’ : derived from combined realization with
reversed coefficient vector results in
- same magnitude response
- different phase response
][....]1[.][.][ 10 Nkubkubkubky N
][....]1[.][.][ 01 Nkubkubkubky NN

FIR Filters 6/14
• `Lattice form’ : derivation (I)
u[k] u[k-1]
u[k-2]
xb1
+
xb2
+
x
+
x
+
b3
u[k-3]
xb3
+
b2 x
+
xbo
+
y[k]
b4x
+y[k]
u[k-4]
xb4
b1 x bo

FIR Filters 7/14
• `Lattice form’ : derivation (II), this is equivalent to...
(=simple proof)
u[k] u[k-1]
u[k-2]
xb’1
+
xb’2
+
x
+
x
+
b’3
u[k-3]
xb’3
+
b’2 x
+
xb’o
+
y[k] 0x
+y[k]
u[k-4]
x0
b’1 x b’o+
+
x
xko
...,...,...,,, '3
'2
'10
'0
0
40 bbbbb
b
bk
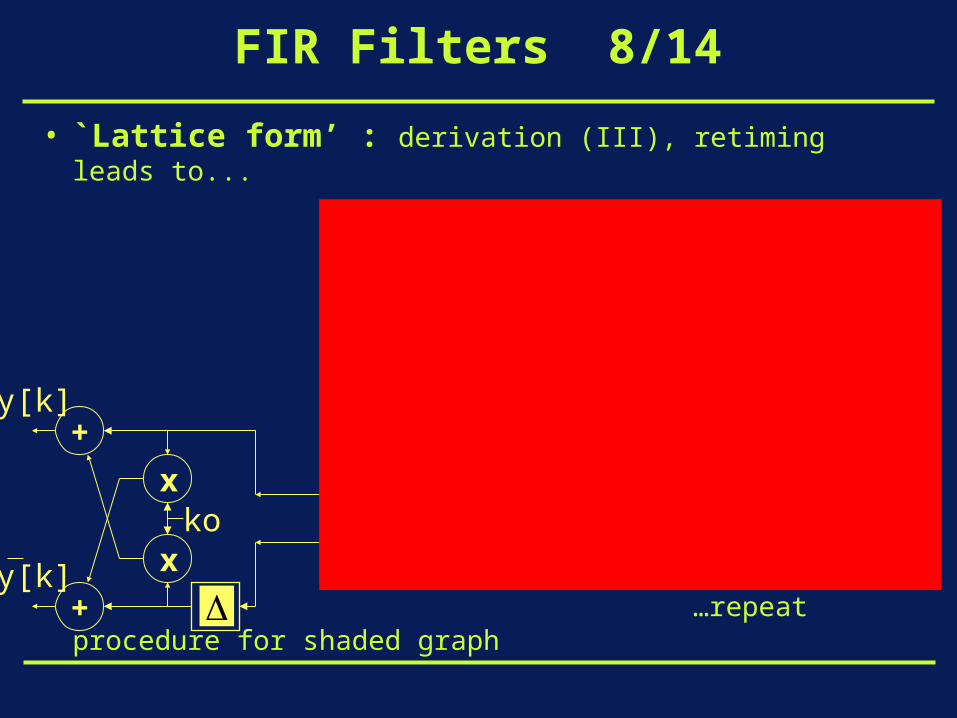
FIR Filters 8/14
• `Lattice form’ : derivation (III), retiming leads to...
…repeat procedure for shaded graph
u[k] u[k-3]
u[k-2]
xb’o
+
xb’1
+
x
+
x
+
b’3
u[k-2]
xb’2
+
b’2 x
+
b’3
y[k]
y[k]
xb’1 x b’o
+
+
x
xko

FIR Filters 9/14
• `Lattice form’ : derivation (IV), end result is...
u[k]
y[k]
y[k]
+
+
x
xko
+
+
x
xk1
+
+
x
xk2
+
+
x
xk3
xk4

FIR Filters 10/14
`Lattice form’ : • ki’s are `reflection coefficients’
• procedure for computing ki’s from bi’s corresponds to `Schur-Cohn’ stability test (control theory):
all zeros of B(z) are stable (i.e. lie inside unit circle)
iff all reflection coefficients statisfy |ki|<1 (i=1,…,N-1)
(ps: procedure breaks down if |ki|=1 is encountered)

FIR Filters 11/14
Linear-phase FIR filters• Non-causal zero-phase filters :
example: symmetric impulse response
h[-L],….h[-1],h[0],h[1],...,h[L]
h[k]=h[-k], k=1..L
frequency response is
- real-valued (=zero-phase) transfer function
- causal implementation by introducing (group) delay
L
k
L
Lk
kjj kkaekheH0
. ).cos(].[...].[)(
kL

FIR Filters 12/14
Linear-phase FIR filters• Causal linear-phase filters :
example: symmetric impulse response & N even
h[0],h[1],….,h[N]
N=2L (even)
h[k]=h[N-k], k=0..L
frequency response is
- causal implementation of zero-phase filter, by
introducing (group) delay
L
k
LjN
k
kjj kkaeekheH00
. ).cos(].[....].[)(
kN
Lj
ez
L ezj
0

FIR Filters 13/14
Linear-phase FIR filters
Type-1 Type-2 Type-2 Type-4
N=2L=even N=2L+1=odd N=2L=even N=2L+1=odd
symmetric anti-symmetric symmetric anti-symmetric
h[k]=h[N-k] h[k]=-h[N-k] h[k]=h[N-k] h[k]=-h[N-k]
zero at zero at zero at
LP/HP/BP LP/BP HP
L
k
Nj kkae0
2/ ).cos(].[.
L
k
Nj kkae0
2/ ).cos(].[).2
cos(
L
k
Nj kkaej0
2/ ).cos(].[).2
sin(.
1
0
2/ ).cos(].[).sin(L
k
Nj kkae
,0 0

FIR Filters 14/14
Linear-phase FIR filters• efficient direct-form realization.
example:
bo
y[k]
u[k]
+
+ ++ +
++
x xb4
xb3
xb2
xb1
++

Filter Design by Optimization
(I) Weighted Least Squares Design :• select one of the basic forms that yield linear phase
e.g. Type-1
• specify desired frequency response (LP,HP,BP,…)
e.g.: LP
• optimization criterion is
where is a weighting function
)(.).cos(].[.)( 2/
0
2/ AekkaeeH NjL
k
Njj
)(.)( 2/ d
Njd AeH
dAAWdHeHWaaF ddj
L
22
0 )()()()()()(),...,(
0)( W
edge) stopband ( ,0)(
edge) passband ( ,1)(
S
P
Sd
Pd
A
A

Filter Design by Optimization
• …this is equivalent to
i.e. convex `Quadratic Optimization’ problem• this is often supplemented with additional constraints...
constant
)cos(...)cos(1)(
)().().(
)().().(
...
.2..),...,(
0
0
10
0
Lc
dcAWb
dccWQ
aaax
bxxQxaaF
T
d
T
LT
TTL

Filter Design by Optimization
Example: Low-pass (LP) design
optimization criterion is
an additional constraint may be imposed to control the pass-band ripple …
… as well as the stop-band ripple
bxxQxdAdAaaF TTL
S
P
.2..)(.1)(),...,( 2
0
2
0
edge) (stopband ,0)(
edge) (passband ,1)(
Sd
Pd
A
A
ripple) passband is ( ,1)( PP PA
ripple) stopband is ( ,)( SS SA

PS: Filter Specification
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
Passband Ripple
Stopband Ripple
Passband Cutoff -> <- Stopband Cutoff
S
P SP1

Filter Design using `Windows’
Example : Low-pass filter design• ideal low-pass filter is
• hence ideal time-domain impulse response is
• truncate hd[k] to N+1 samples :
• add (group) delay to turn into causal filter
0
1)(
C
CdH
k
kdeeHkh
c
cjdd
kj
)sin(....).(
2
1][
otherwise 0
2/2/ ][][
NkNkhkh d

Filter Design using `Windows’
Example : Low-pass filter design (continued)• it can be shown that this corresponds to the solution of weighted least-
squares optimization with the given Hd, and weighting function for all freqs.
• truncation corresponds to applying a `rectangular window’ :
• +++: simple procedure (also for HP,BP,…)• - - - : truncation in the time-domain results in `Gibbs effect’ in the
frequency domain, i.e. large ripple in pass-band and stop-band, which cannot be reduced by increasing the filter order N.
][].[][ kwkhkh d
otherwise 0
1][
2/2/ NkNkw
1)( W

Filter Design using `Windows’
Remedy : apply windows other than rectangular window:• time-domain multiplication with a window function w[k] corresponds to
frequency domain convolution with W(z) :
• candidate windows : Han, Hamming, Blackman, Kaiser,…. (see textbooks, see DSP-I)
• window choice/design = trade-off between side-lobe levels (define peak pass-/stop-band ripple) and width main-lobe (defines transition bandwidth)
][].[][ kwkhkh d
)(*)()( zWzHzH d

Design Procedure• To fully design and implement a filter five steps are required:
(1) Filter specification.
(2) Coefficient calculation.
(3) Structure selection.
(4) Simulation (optional).
(5) Implementation.

Filter Specification - Step 1
(a)
1
f(norm)fc : cut-off frequency
pass-band stop-band
pass-band stop-bandtransition band
1
s
pass-bandripple
stop-bandripple
fpb : pass-band frequency
fsb : stop-band frequency
f(norm)
(b)
p1
s
p0
-3
p1
fs/2
fc : cut-off frequency
fs/2
|H(f)|(dB)
|H(f)|(linear)
|H(f)|

Coefficient Calculation - Step 2• There are several different methods available, the most popular are:
– Window method.– Frequency sampling.– Parks-McClellan.
• We will just consider the window method.

Window Method
• First stage of this method is to calculate the coefficients of the ideal filter.• This is calculated as follows:
0nfor
0nfor
2
sin2
12
1
2
1
c
c
cc
nj
njd
fn
nf
de
deHnh
c
c
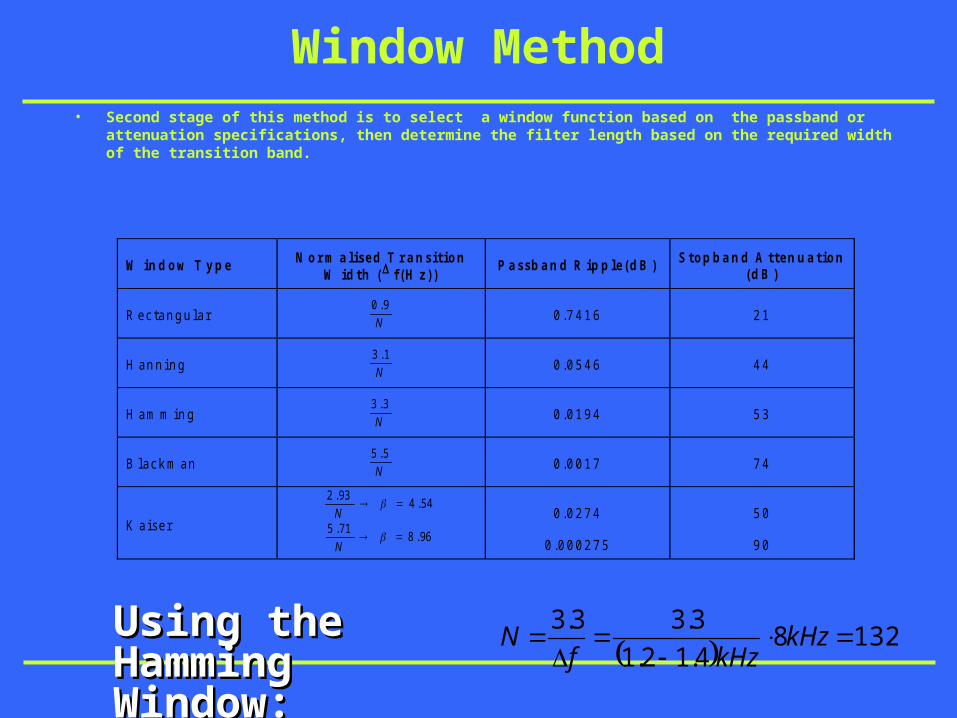
Window Method• Second stage of this method is to select a window function based on the passband or attenuation
specifications, then determine the filter length based on the required width of the transition band.
W i n d o w T y p e N o r m a l i s e d T r a n s i t i o nW i d t h ( f ( H z ) )
P a s s b a n d R i p p l e ( d B ) S t o p b a n d A t t e n u a t i o n( d B )
R e c t a n g u l a rN
9.00 . 7 4 1 6 2 1
H a n n i n gN
1.30 . 0 5 4 6 4 4
H a m m i n gN
3.30 . 0 1 9 4 5 3
B l a c k m a nN
5.50 . 0 0 1 7 7 4
K a i s e r
54.493.2
N
96.871.5
N
0 . 0 2 7 4
0 . 0 0 0 2 7 5
5 0
9 0
13284.12.1
3.33.3
kHz
kHzfNUsing the Hamming Using the Hamming
Window:Window:

Window Method
• The third stage is to calculate the set of truncated or windowed impulse response coefficients, h[n]:
nWnhnh d even Nfor
odd Nfor
22
2
1
2
1
Nn
N
Nn
N
133
2cos46.054.0
2
cos46.054.0
n
N
nnW
forfor
Where:Where:6666 nforfor

Window Method
• Matlab code for calculating coefficients:close all;clear all;
fc = 8000/44100; % cut-off frequencyN = 133; % number of tapsn = -((N-1)/2):((N-1)/2);n = n+(n==0)*eps; % avoiding division by zero
[h] = sin(n*2*pi*fc)./(n*pi); % generate sequence of ideal coefficients[w] = 0.54 + 0.46*cos(2*pi*n/N); % generate window functiond = h.*w; % window the ideal coefficients
[g,f] = freqz(d,1,512,44100); % transform into frequency domain for plotting
figure(1)plot(f,20*log10(abs(g))); % plot transfer functionaxis([0 2*10^4 -70 10]);
figure(2);stem(d); % plot coefficient valuesxlabel('Coefficient number');ylabel ('Value');title('Truncated Impulse Response');
figure(3)freqz(d,1,512,44100); % use freqz to plot magnitude and phase responseaxis([0 2*10^4 -70 10]);

Window Method
0 0.5 1 1.5 2
x 104
-6000
-4000
-2000
0
Frequency (Hz)
Pha
se (
degr
ees)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
-60
-40
-20
0
Frequency (Hz)
Mag
nitu
de (
dB)
0 20 40 60 80 100 120 140-0.1
0
0.1
0.2
0.3
0.4
Coefficient number
Val
ue
Truncated Impulse Response

Equiripple Design
• Starting point is minimax criterion, e.g.
• Based on theory of Chebyshev approximation and the `alternation theorem’, which (roughly) states that the optimal ai’s are such that the `max’ (maximum weighted approximation error) is obtained at L+2 extremal frequencies…
…that hence will exhibit the same maximum ripple (`equiripple’)• Iterative procedure for computing extremal frequencies, etc. (Remez
exchange algorithm, Parks-McClellan algorithm) • Very flexible, etc., available in many software packages• Details omitted here (see textbooks)
)(maxmin)()().(maxmin),...,( 0,...,0,...,0 00 EAAWaaF
LL aadaaL
2,..,1for )()(max0 LiEE i

Software
• FIR Filter design abundantly available in commercial software
• Matlab:
b=fir1(n,Wn,type,window), windowed linear-phase FIR design, n is filter order, Wn defines band-edges, type is `high’,`stop’,…
b=fir2(n,f,m,window), windowed FIR design based on inverse fourier transform with frequency points f and corresponding magnitude response m
b=remez(n,f,m), equiripple linear-phase FIR design with Parks-McClellan (Remez exchange) algorithm