Embed Size (px)
Citation preview

A Secure Cooperative Approach for
Nonline-of-Sight Location Verification
in VANET
Osama Abumansoor and Azzedine BoukercheDepartment of Information Technology and Engineering, University of Ottawa
IEEE Transactions on Vehicular Technology, TVT 2012
Wireless & Mobile Network Laboratory (WMNL.) Department of Computer Science and Information Engineering, Tamkang University
Page: 2WMNL
Outline
Introduction
Multi-Hop Location Verification Protocol (MHLVP)
Performance Evaluation
Conclusion
Page: 3WMNL
• Vehicular networks (VANETs) are experiencing rapid growth and evolution under the increasing demand of vehicular traffic management, driving safety, and comfort of drivers.
Introduction

Page: 4WMNL
Introduction
• Many of these applications require knowledge of neighboring vehicles’ location specifications.

Page: 5WMNL
Introduction
• Improving and maintaining drivers’ neighborhood awareness are important in VANETs.
Page: 6WMNL
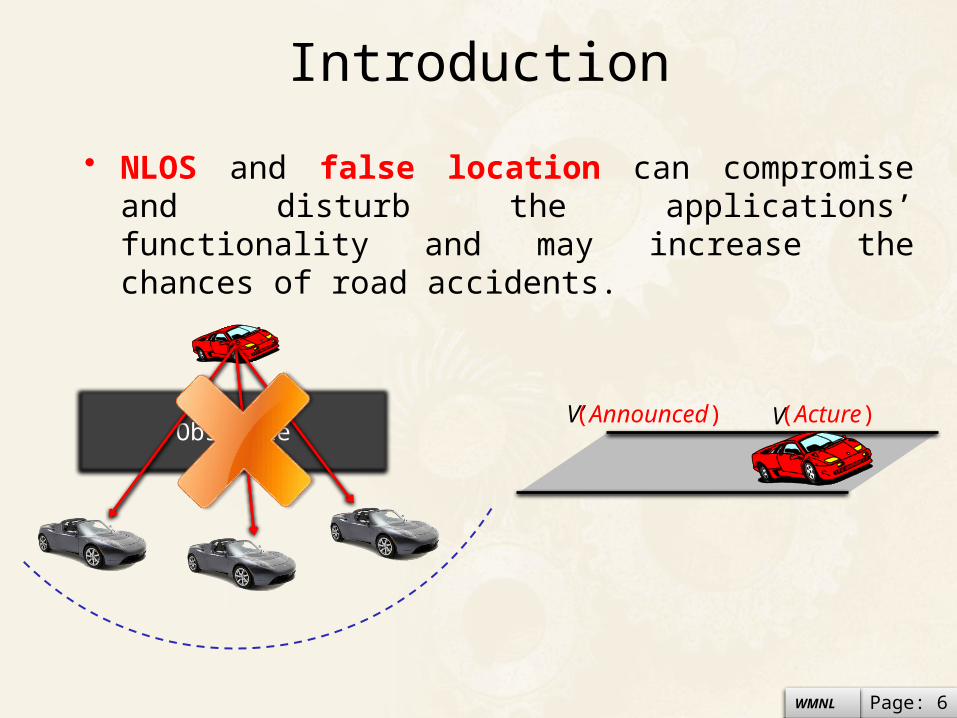
Introduction
• NLOS and false location can compromise and disturb the applications’ functionality and may increase the chances of road accidents.
V (Acture)V’(Announced)Obstacle

Page: 7WMNL
Introduction
• NLOS and false location can compromise and disturb the applications’ functionality and may increase the chances of road accidents.
!
!
Page: 8WMNL
Goal
• Proposes a novel location verification protocol among cooperative neighboring vehicles for VANETs
– Verifies a vehicle’s announced location.
– Overcome an NLOS condition.
– Increase the vehicles’ rate of neighborhood awareness
– Providing reliable position information for upper level applications.

Page: 9WMNL
Multi-Hop Location Verification Protocol
(MHLVP)
Page: 10WMNL
Network Assumption
• Each vehicle is equipped with
– GPS
– Communication device
– Capability for measuring the RSS
Page: 11WMNL
MHLVP Protocol - Basic Idea
Location Verification
NLOS Condition False location

Page: 12WMNL
MHLVP Protocol - Basic Idea
Location Verification
NLOS Condition False location
A
B
(XA,YA)
(Acture)
dAB(RSS)dAB(Coordinate)
B’ (XB,YB)(Announced)
dAB(RSS)dAB(Coordinate)

Page: 13WMNL
dAB(RSS)dAB(Coordinate) dAB(RSS)dAB(Coordinate)
C(XC,YC)
MHLVP Protocol - Basic Idea
Location Verification
NLOS Condition False location
A
B
(XA,YA)
(Acture)
dAB(RSS)dAB(Coordinate)
B’ (XB,YB)(Announced)
Obstacle
A (XA,YA)
B (XB,YB)dBC(RSS)
dAC(RSS)
θ
dAB(RSS)
Page: 14WMNL
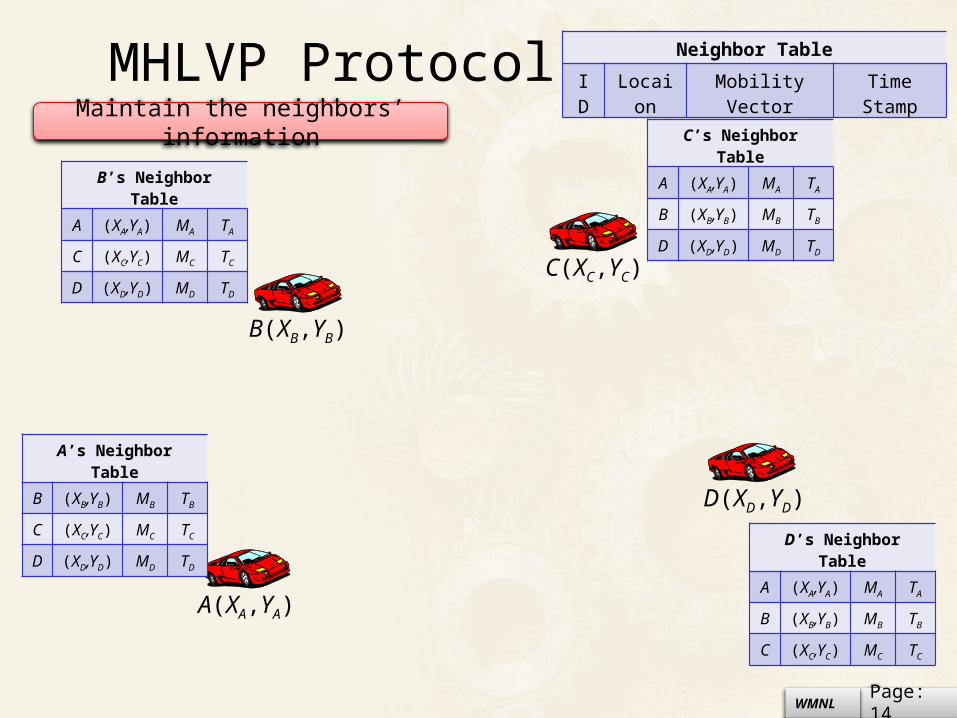
MHLVP Protocol
A(XA,YA)
B(XB,YB)
C(XC,YC)
D(XD,YD)
Neighbor Table
ID Locaion Mobility Vector Time Stamp
A’s Neighbor Table
B (XB,YB) MB TB
C (XC,YC) MC TC
D (XD,YD) MD TD
B’s Neighbor Table
A (XA,YA) MA TA
C (XC,YC) MC TC
D (XD,YD) MD TD
C’s Neighbor Table
A (XA,YA) MA TA
B (XB,YB) MB TB
D (XD,YD) MD TD
D’s Neighbor Table
A (XA,YA) MA TA
B (XB,YB) MB TB
C (XC,YC) MC TC
Maintain the neighbors’ information

Page: 15WMNL
MHLVP Protocol
A(XA,YA)
B(XB,YB)
C(XC,YC)
D(XD,YD)
Neighbor Table
ID Locaion Mobility Vector Time Stamp
A’s Neighbor Table
B (XB,YB) MB TB
C (XC,YC) MC TC
D (XD,YD) MD TD
B’s Neighbor Table
A (XA,YA) MA TA
C (XC,YC) MC TC
D (XD,YD) MD TD
C’s Neighbor Table
A (XA,YA) MA TA
B (XB,YB) MB TB
D (XD,YD) MD TD
D’s Neighbor Table
A (XA,YA) MA TA
B (XB,YB) MB TB
C (XC,YC) MC TC
Location Verification
dAB(RSS)
dAB(Coordinate)
dAD(RSS)dAD(Coordinate)
22ADAD YYXX
YESUpdate the information
NODiscard the information

Page: 16WMNL
MHLVP Protocol
A(XA,YA)
D(XD,YD)
A’s Neighbor Table
B (XB,YB) MB TB
C (XC,YC) MC TC
D (XD,YD) MD TD
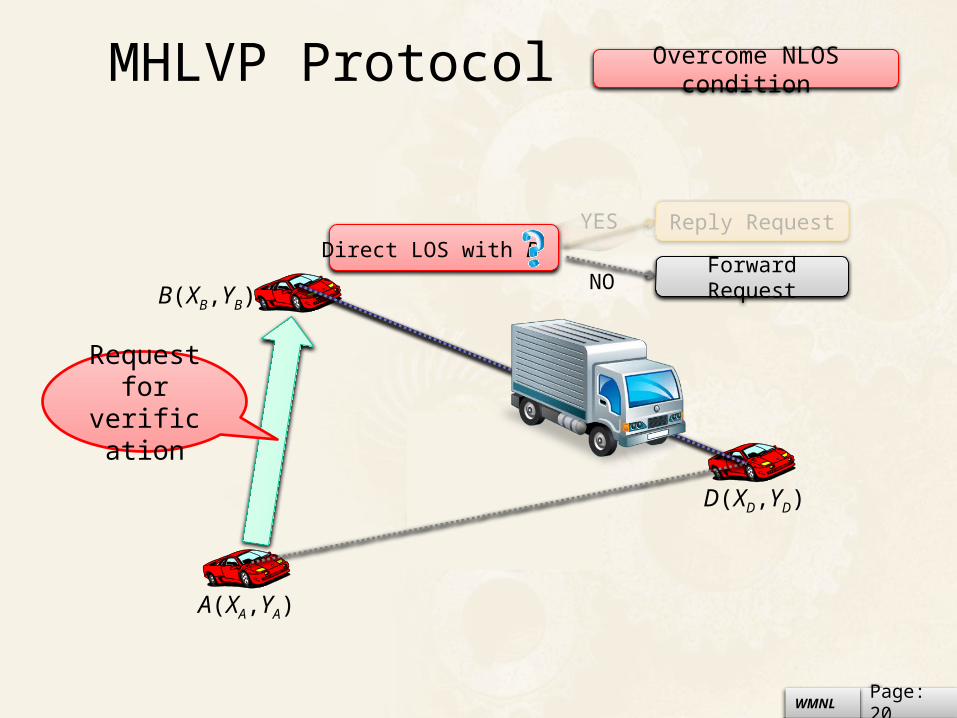
Overcome NLOS condition
A’s Neighbor Table
B (XB,YB) MB TB
C (XC,YC) MC TC
D (XD,YD) MD TD!
Request for verification
!!
B(XB,YB)
C(XC,YC)

Page: 17WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
YES Reply Request
NO Forward RequestDirect LOS with D

Page: 18WMNL
MHLVP Protocol
A(XA,YA)
D(XD,YD)
C(XC,YC)
dBD(RSS)
Overcome NLOS condition
{dBD(RSS), D(XD,YD)}
B(XB,YB)

Page: 19WMNL
MHLVP Protocol
A(XA,YA)
D(XD,YD)
B(XB,YB)
dBD(RSS)
Overcome NLOS condition
dAB(RSS)
C(XC,YC)
θ
)(arcos BDBA
cos222BDABBDABAD ddddd
dAD(RSS)
dAD(RSS)dAD(Coordinate)
YESUpdate the information
NOIgnore and delete the record
Page: 20WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
YES Reply Request
NO Forward RequestDirect LOS with D
Request for verification

Page: 21WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
Request for verification !

Page: 22WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
{dCD(RSS), D(XD
,YD)}
Direct LOS with D

Page: 23WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
dBD(RSS)
θBCD
dCD(RSS)
dBC(RSS)
dBD(RSS)dBD(Coordinate)

Page: 24WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
dBD(RSS)
{dBD(RSS), D(XD,YD)}
Page: 25WMNL
C(XC,YC)
B(XB,YB)
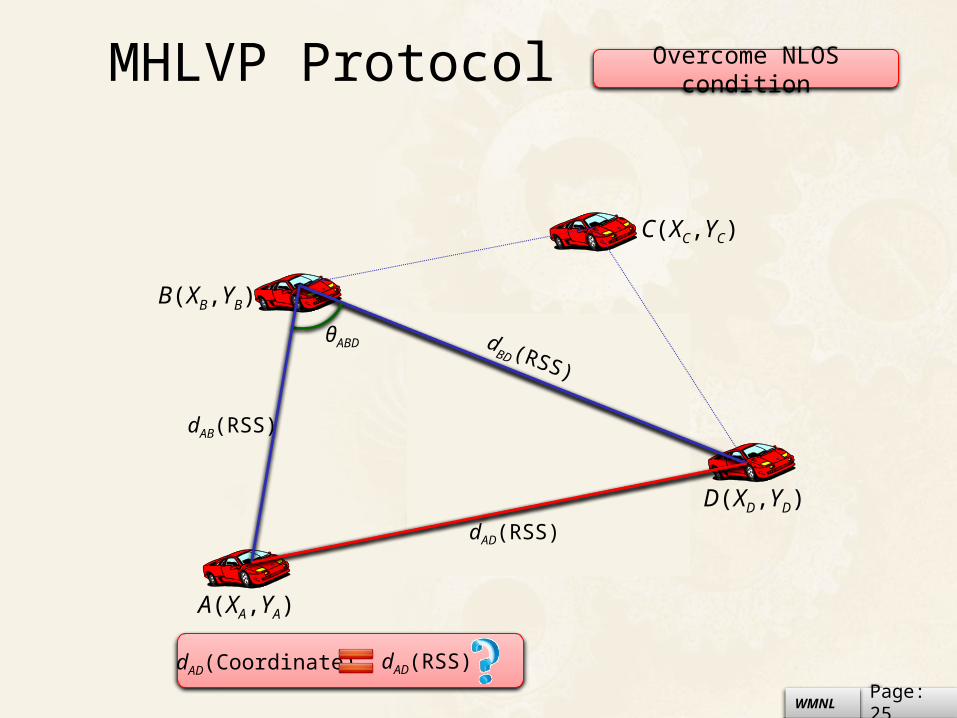
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
dBD(RSS)
θABD
dAB(RSS)
dAD(RSS)
dAD(RSS)dAD(Coordinate)
Page: 26WMNL
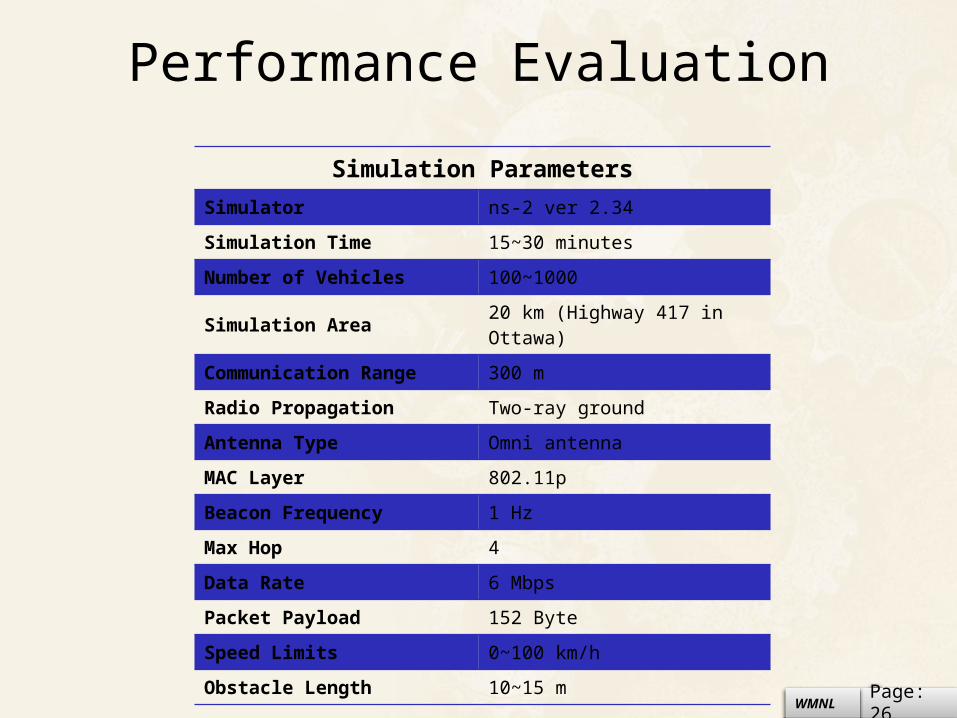
Performance Evaluation
Simulation ParametersSimulator ns-2 ver 2.34
Simulation Time 15~30 minutes
Number of Vehicles 100~1000
Simulation Area 20 km (Highway 417 in Ottawa)
Communication Range 300 m
Radio Propagation Two-ray ground
Antenna Type Omni antenna
MAC Layer 802.11p
Beacon Frequency 1 Hz
Max Hop 4
Data Rate 6 Mbps
Packet Payload 152 Byte
Speed Limits 0~100 km/h
Obstacle Length 10~15 m
Page: 27WMNL
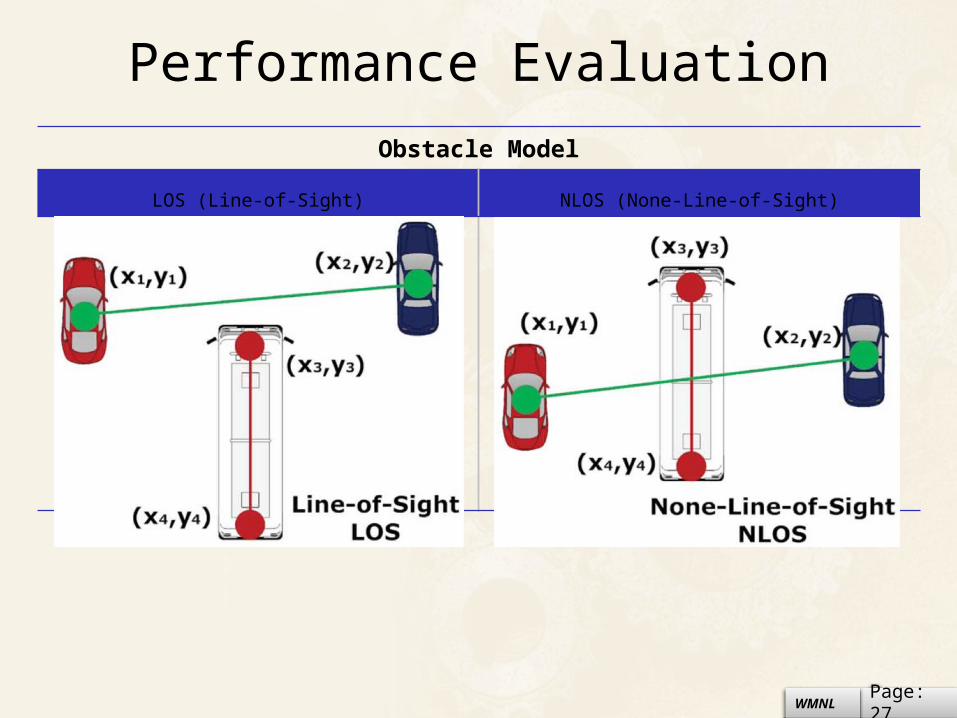
Performance EvaluationObstacle Model
LOS (Line-of-Sight) NLOS (None-Line-of-Sight)

Page: 28WMNL
Performance EvaluationNeighborhood Awareness and Location Verification
200 Vehicles with 25% obstacle Different vehicle densities with 25% obstacle

Page: 29WMNL
Performance EvaluationChannel Capacity Utilization
6 Mb/s、 packet size 152Bytes、 with 25% obstacle
Page: 30WMNL
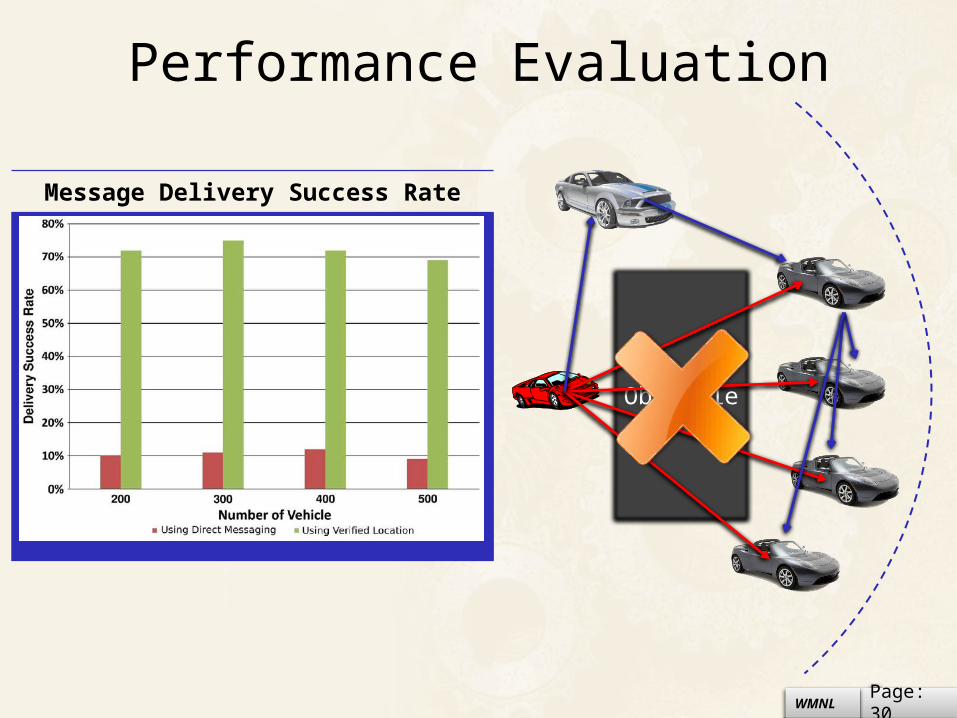
Performance Evaluation
Message Delivery Success Rate
Obstacle
Page: 31WMNL
Conclusion
• This paper proposes a novel location verification protocol among cooperative neighboring vehicles for VANETs
– Verifies a vehicle’s announced location.
– Overcome an NLOS condition.
– Increase the vehicles’ rate of neighborhood awareness
– Improve the message delivery success rate
– Providing reliable position information for upper level applications.

Page: 32WMNL
Thanks~~~Thanks~~~Thanks~~~