Embed Size (px)
Citation preview

Proceedings of FUELCELL2006The 4th International Conference on FUEL CELL SCIENCE, ENGINEERING and TECHNOLOGY
June 19-21, 2006, Irvine, CA, USA
FUELCELL2006-97161
OPTIMAL DESIGN OF HYBRID FUEL CELL VEHICLES
Jeongwoo Han ∗, Michael Kokkolaras, Panos Papalambros{jwhan,mk,pyp }@umich.edu
Department of Mechanical Engineering, University of MichiganG.G. Brown Bldg., Ann Arbor, Michigan 48109
ABSTRACTFuel cells are being considered increasingly as a viable al-
ternative energy source for automobiles because of their cleanand efficient power generation. Numerous technological con-cepts have been developed and compared in terms of safety, ro-bust operation, fuel economy, and vehicle performance. How-ever, several issues still exist and must be addressed to improvethe viability of this emerging technology. Despite the relativelylarge number of models and prototypes, a model-based vehicledesign capability with sufficient fidelity and efficiency is not yetavailable in the literature. In this article we present an analy-sis and design optimization model for fuel cell vehicles that canbe applied to both hybrid and non-hybrid vehicles by integrat-ing a fuel cell vehicle simulator with a physics-based fuel cellmodel. The integration is achieved via quasi-steady fuel cell per-formance maps, and provides the ability to modify the charac-teristics of fuel cell systems with sufficient accuracy (less than5% error) and efficiency (98% computational time reduction onaverage). Thus, a vehicle can be optimized subject to constraintsthat include various performance metrics and design specifica-tions so that the overall efficiency of the hybrid fuel cell vehiclecan be improved by 14% without violating any constraints. Theobtained optimal fuel cell system is also compared to other, notvehicle-related, fuel cell systems optimized for maximum powerdensity or maximum efficiency. A tradeoff between power den-sity and efficiency can be observed depending on the size of com-pressors. Typically, a larger compressor results in higher fuel cellpower density at the cost of fuel cell efficiency because it oper-ates in a wider current region. When optimizing the fuel cell
∗Corresponding author, Phone/Fax: (734) 647-8402/8403
system for maximum power density, we observe that the opti-mal compressor operates efficiently. When optimizing the fuelcell system to be used as a power source in a vehicle, the opti-mal compressor is smaller and less efficient than the one of thefuel cell system optimized for maximum power density. In spiteof this compressor inefficiency, the fuel cell system is 9% moreefficient on average. In addition, vehicle performance can be im-proved significantly because the fuel cell system is designed bothfor maximum power density and efficiency. For a more com-prehensive understanding of the overall design tradeoffs, severalconstraints dealing with cost, weight, and packaging issues mustbe considered.
1 IntroductionCurrently, PEM fuel cells are agreed upon as the most suit-
able technology for vehicular applications because of their mo-bility and high power density [1]. Nevertheless, several issuesstill exist that must be addressed in order to assess and improveviability of fuel cell vehicles, including high vs. low pressurefuel cell vehicles and hybrid vs. non-hybrid fuel cell vehicles.Several fuel cell vehicle concepts and fuel cell system designshave been proposed and studied in terms of safety, robust opera-tion, fuel economy, and vehicle performance. To the best of ourknowledge, despite the relatively large number of models andprototypes, an integrated model-based vehicle design methodol-ogy with sufficient fidelity and efficiency is not yet available inthe literature.
In order to analyze the behavior of fuel cell vehicles, mod-els must be developed for subsystems, such as fuel cell, bat-
1 Copyright c© 2006 by ASME

tery, and motor. The essence of fuel cell system modeling is themembrane-electrode assembly (MEA) model, which describesmathematically the entire physical environment of the electro-chemical reactions; the transport phenomena of gases (hydrogen,oxygen, vapor, etc.), water, protons, and current; and the rela-tionships among fuel cell voltage, current, temperature, material(electrode, catalyst and membrane) properties, and transport pa-rameters. MEA modeling has been accomplished by analyzingphysical effects of reactant gases [2, 3], performing experimentson actual stacks [4], or integrating the physical and experimentalmodels [5]. Many publications on MEA models have concen-trated on analyzing the water transport as well as the gas diffu-sion [6–8]. Heat transfer and thermodynamics were included topredict the temperature and humidity profiles in both transientand steady-state conditions [9, 10]. Computational fluid dynam-ics have been used extensively to analyze air and water transportbehavior of fuel cell systems [11]. Unlike the relatively wideavailability of MEA models, only a few publications are avail-able on fuel cell system modeling. Pukrushpan et al. [12] ap-plied reactant flow dynamics in order to estimate the net poweroutput as a function of reactant partial pressures and the powerlosses in flow devices. Using MEA and fuel cell system mod-els, optimization studies have been conducted to minimize theweighted sum of the inverse of functional performance and prod-uct cost [13] and to maximize power density by adjusting properoperating conditions [14]. However, objectives in these papersdo not reflect the requirements of the “supersystems” in whichthe designed fuel cell is used. Usually, requirements cannot beexpressed using a single attribute; a combination of several per-formance and cost metrics is required. For example, design ob-jectives of a fuel cell system to be used as a power source in avehicle, include maximum power, power density, product cost,and reliability, and are possibly conflicting with design objec-tives of other vehicle systems. In this paper, the fuel cell systemis designed to be suitable for a certain type of vehicle by solvingan integrated vehicle and fuel cell design problem.
The considered fuel cell system and fuel cell vehicle modelsare presented in Section 2. The process of integrating these mod-els is also introduced. In order to ensure fidelity and demonstrateefficiency, the vehicle simulation results obtained quasi-steadyand full dynamic fuel cell models are compared. In Section 3,the design optimization problem is solved using derivative-freeoptimization algorithms. Concluding remarks are provided inSection 4.
2 Fuel Cell Hybrid Vehicle ModelIn addition to the fuel cell model mentioned in the previous
section, several vehicle simulation models have been developedusing simple fuel cell performance maps obtained from experi-ments. Each model has a different purpose and perspective, andso each model has several limitations for optimization studies.
For example, most of the control-oriented fuel cell system mod-els require computations that are prohibitively expensive for op-timization purposes. On the other hand, many vehicle simulationmodels cannot handle significant changes in the design of fuelcell system components because of the low fidelity and limita-tions of the models. Therefore, the purpose of the model used inthis paper is to capture the effects of variations in design accu-rately with an efficiency that enables optimization studies.
2.1 Quasi-static Fuel Cell System ModelThe quasi-static fuel cell system model is based on the tran-
sient fuel cell model developed by Pukrushpan et al. [12]. Thismodel generates a static performance map that represents themaximum power for a certain range of fuel consumption withgiven control constraints.
35
humidifier
wate
r in
jecte
d
compressor
cooler
HydrogenTank
Pressure
Adjusted
Humidity
Adjusted
Temperature
Adjusted
Figure 3.3: Reactant supply subsystems
In this study, we assume that the properties of the inlet reactant flow except for the
partial pressures can be perfectly controlled to make the problem simple. Additionally, the
pressure of the anode, pan is also assumed to be instantly regulated as a function of pca.
With those assumptions, the voltage output, expressed in equation 3.20, can be reduced to
a function of current density and the oxygen partial pressure as
vfc = vfc(pO2,ca, i) (3.21)
where pO2,ca is the partial pressure of oxygen. Since the oxygen partial pressure, in turn,
is controlled by the output pressure of the compressor, the performance of the fuel cell is
governed by the compressor input, which is determined as a function of the stack current
by a feedforward control (Figure 3.4). Thus, the designed power output of the fuel cell can
be obtained by applying a proper feed-forward control on vcm [25].
Since there are many sources of disturbance due to the transient irregularity of flows
and environmental variation, a feedback controller is typically used to operate the fuel cell
more consistently. Because this study, however, is interest in the optimization based on the
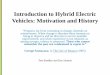
Figure 1. Reactant supply subsystems (modified from [12])
The power output from a fuel cell systemPnetcan be deter-mined as the difference between the power generated from a fuelcell stackPfc and the power consumed by auxiliary componentsPcon:
Pnet= Pfc−Pcon= nfcIfcvfc−Pcon, (1)
wherenfc is the number of cells,Ifc is stack current, andvfc iscell voltage. If the composition and structure of the cells is de-termined, the cell voltage is a function of stack current densityand reactant flow properties, including partial pressures, humid-ity, and temperature. The properties are governed by reactantsuppliers consisting of four flow systems: (i) hydrogen supplysystem, (ii) air supply system, (iii) cooling system, and (iv) hu-midifying system (Figure 1). This study focuses on high pressurefuel cell systems with a compressor because most of the proto-types are developed using high pressure fuel cells due to theirhigher power density.
2 Copyright c© 2006 by ASME

We assume that the properties of the inlet reactant flow, ex-cept for the partial pressures, can be controlled perfectly withouttransient irregularity. Additionally, the pressure at the anode isalso assumed to be regulated instantly as a function of cathodepressure. Ambient air is assumed to be constant. The assumedproperties are given in Table 1. Under these assumptions, the
Table 1. Thermodynamical parameters used in the model
Parameter Value
Ambient TemperatureTamb(Kelvin) 298
Stack TemperatureTst (Kelvin) 353
Ambient pressurepamb(bar) 1
Ambient Relative Humidity 0.5
Relative Humidity of Cathode Inlet Flow 0.8
Anode Relative Humidity 1
cell voltage can be reduced to a function of current density andoxygen partial pressurepO2,ca:
vfc = vfc(pO2,ca, Ifc) = E−vact−vohm−vconc, (2)
whereE is the fuel cell open circuit voltage, andvact, vohm, andvconcare overvoltages due to the activation loss, ohmic loss, andconcentration loss, respectively. The detailed explanations andformulas are presented in [12]. The overvoltage due to the fuelcrossover and internal currents is neglected because the loss isrelatively small in PEM fuel cells. Since the oxygen partial pres-sure is controlled by the output pressure of the compressor, theperformance of the fuel cell is governed by the compressor input,which is determined as a function of the stack current by feed-forward control. Thus, the designed power output of the fuel cellcan be obtained by applying a proper feed-forward control on thecompressor command voltage,vcm [12]. In this study, the feed-forward controller is designed to meet the target values of oxygenexcess ratioλ(Ifc). Thus, the stack power can be simplified as afunction of stack current and oxygen excess ratio.
Given ambient air properties, air pressure and mass flow rateof the compressor outlet can be calculated from the mass con-servation principle and thermodynamic and psychrometric gasproperties under a quasi-static assumption. Figure 2 illustratesreactant flows under steady-state conditions. As the stack cur-rent Ifc is drawn from the fuel cell, the rates of hydrogen andoxygen consumed in the reaction can be calculated as
WH2,rea= MH2
nfcIfc2F
(3)
Compressor Cooler
Humidifier
Cathode
AnodeMem-brane
Return Manifold
WO2,in
WN2,in
Wvap,in
Wvap,inj
WO2,out
WN2,out
Wvap,out
Wvap,gen
Wvap,an
Wvap,mem
Wvap,sat
WO2,rea
WH2,an
WH2,rea
Hydrogen TankCathode Side Anode Side
Figure 2. Diagram of reactant flows in a PEM fuel cell
WO2,rea= MO2
nfcIfc4F
, (4)
whereWH2,reaandWO2,rea, MH2andMO2
, andF are the ratesof reacted hydrogen and oxygen, the molar masses of hydrogenand oxygen, and the Faraday constant (= 96485C/mol), respec-tively. At steady state, since the oxygen is directly supplied fromthe ambient and transient manifold filling effect is ignored, therate of oxygen supplied to the cathode equals the rate of oxygenfrom the ambient. Therefore, the total mass flow rate of the inletair can be represented as a function of stack current and oxygenexcess ratio:
Win = WO2,in +WN2+Wvap,in (5)
WO2,in = λWO2,rea (6)
WN2=
(1−MFO2)MN2
MFO2·MO2
WO2,in (7)
Wvap,in =MvapMair
pvap,ambpair,amb
(WO2,in +WN2), (8)
whereWO2,in, WN2, andWvap,inare the inlet mass flow rates of
oxygen, nitrogen, and vapor to the cathode side,MN2, Mvap, and
Mair are the molar masses of nitrogen, vapor, and dry air,MFO2is the oxygen mass fraction in dry air (= 0.21), andpvap,amband pair,amb the partial pressures of vapor and dry air in theambient, respectively. The flow rates of the other flows can beobtained similarly.
Once the mass flow rate of each reactant gas is obtained, thepressure of each component can be calculated readily by bal-ancing them. Taking into account the pressure drops in flowchannels, the required pressure raise of the compressor can beexpressed as a function of the inlet air flow rate
pcp = pcp(Win) = pcp(Ifc,λ). (9)
3 Copyright c© 2006 by ASME

In order to control the properties of reactant gases, auxil-iary components consume significant amount of energy. Sincethe compressor consumes more than 80% of all auxiliary energyconsumption in high pressure PEM fuel cells, other energy lossesare commonly neglected when calculating system net power loss.Assuming a constant mechanical static motor efficiency of 0.9,the compressor power consumption is
Pcon = CpWinTamb
0.9ηcp
(pcp
pamb
) γ−1γ−1
, (10)
whereCp andγ are specific heat capacity (1004J/(kg·K)) andratio of specific heats (1.4) of air, respectively,Win is the massflow rate of system inlet flow,ηcp is compressor efficiency, andpcp and pamb are the pressures of the compressor outlet flowand the ambient, respectively. The compressor is assumed to bestatic, driven by a static motor. Thus, a static compressor mapis used to determine the efficiency corresponding to the requiredpressure ratio and the air mass flow rate.
The performance of various compressors needs to be inves-tigated. Because of lack of data, the compressor in this studyis scaled geometrically from the Allied signal compressor givenin [15]. Using the similarity principle, the map of a geometri-cally scaled compressor can be found readily since there is nodifference between the flow characteristics of the original andthe scaled compressor at a given point in the map. The flow andpower is predicted to vary with pump size as
η′cp = ηcp(Win,pcp
pamb) (11)
W′in = α2
cpWin (12)
P′con = α2cpP′con, (13)
whereαcp is the geometric scaling factor, defined asαcp = D′D ,
Win andPconare the inlet mass flow rate and power consumptionof the unscaled compressors, andW′
in andP′conare the inlet massflow rate and power consumption of a newly scaled compressors,respectively. The pressure ratio is invariant.
Using the above relations, the power consumed by the com-pressor motor and the net power output from the fuel cell systemcan be expressed as a function of stack current and oxygen excessratio.
2.2 Fuel Cell Vehicle ModelThe Fuel Cell Vehicle model for OPTimization (FCVOPT)
is a version of the Vehicle Engine SIMulation (VESIM) model,developed at the University of Michigan [16], with battery, mo-tor, and controller modules from ADVISOR, developed at Na-
tional Renewable Energy Laboratory [17]. The VESIM and AD-VISOR models have been validated and proven to be powerfultools to study different vehicle aspects. Since both of them areMATLAB/SIMULINK-based models, they provide ease of re-configuration and subsystem coupling.
The model used here represents the powertrain system ofFC hybrid vehicles, consisting of seven main modules: fuel cellstack, batteries, electrical motor, driver, vehicle controller, drive-train, and vehicle dynamics (Figure 3). The engine model in
DrvingCycle
Vehicle Dynamics
Fuel Cell
Battery
Electric Motor/Generator
T motor
w_wheel
T_shaft
w_shaft
DRIVETRAIN
vehicle speed
speed set
accel
decel
FC PowerLimit
Batt. PowerLimit
Battery Power
req. Power by Motor/ gen. Power by Reg. Brake
Fuel Cell Power
Motor Command
Figure 3. Simulink model of hybrid electric fuel cell vehicles with a re-
generative brake module
VESIM is replaced by a newly developed FC system module thatis simplified as a first-order system with the performance map inorder to make computation affordable. The performance map isgenerated by the high-fidelity FC model, described in the pre-vious section. The motor/generator used in this study is selectedfrom the library of motors published in ADVISOR (MC-AC187).In this motor/generator we assume that the motor/generator lossduring braking equals the loss during acceleration. The batteryand fuel cell control rules are selected from ADVISOR. Since theregenerative braking is employed to enhance the fuel economy,the battery is charged by the generator during braking. The massof the vehiclemveh is affected by any changes in these compo-nents according to
mveh= mbody+nfc ·Afc ·ρfc +mcp·α3cp+maux
+mbatt·nbatt·αbatt +mmot·αmot,(14)
wheremveh, mbody, mcp, maux, mbatt, andmmot are the massof whole vehicle, vehicle body, initial (unscaled) compressor,fuel cell auxiliary components, battery, and motor, respectively,Afc andρfc are the cell density and area of fuel cells,nbatt isthe number of battery modules, andαbattandαmot are the scalefactor of the battery capacity and motor torque, respectively. Ta-ble 2 lists all model parameters and their values.
4 Copyright c© 2006 by ASME

Table 2. Vehicle parameters used in the model
Parameter Value
Drag Coefficient 0.7
Vehicle Frontal Area 3.58m2
Vehicle Auxiliary Power Load (Fxed) 1kW
Vehicle Body Mass (VESIM Initial),mbody 4272kg
Fuel Cell Density,ρfc 3.77kg/(m2· cell)
Fuel Cell Area,Afc 0.038m2
Compressor Initial Mass,mcp 15kg
Fuel Cell Auxiliary Mass,maux 55kg
Battery Mass,mbatt 11kg /module
Motor Initial Mass,mmot 91kg
Lower Limit of SOC 0.8
Upper Limit of SOC 0.7
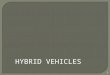
2.3 Integration of Fuel Cell SimulationOne of the objectives of this study is to develop a high-
fidelity fuel cell model that is capable of predicting the effectsof design changes in fuel cell systems, and to integrate it witha vehicle simulator for design optimization of fuel cell vehicles.¿From the quasi-static FC model, developed in Section 2.1, a FCperformance map is generated for a given FC design and passedto the FCVOPT model to estimate hydrogen consumption. Theoptimizer determines whether the design is optimal or not basedon given criteria. In order to enhance computational efficiency,ten previous designs for fuel cells are stored, and if the same fuelcell design is requested, the corresponding map is reused (Figure4).
The performance map indicates the hydrogen consumptionor energy consumption to produce maximum power at a givenstack current. For a given stack current, the hydrogen consump-tion is determined by Equation (3). Therefore, the maximum ef-ficiency can be obtained when the maximum power is achievedby providing the optimal compressor command. In other words,at a given stack current, maximum power or maximum efficiencycan be achieved by adjusting the oxygen excess ratio. Therefore,a nested optimization is used to find optimal oxygen excess ratiosfor a given fuel cell design.
The compressor, used in the FC model, is associated withtwo constraints: upper and lower bounds for mass flow rate. Themass flow rate can not be larger than the specified maximum flowrate. In this study, we assume that the maximum flow rate is alsoscaled using Equation (12). On the other hand, for centrifugaland axial compressors, a minimum amount of mass flow rate isrequired at any given pressure ratio. Otherwise, because of an
Steady State Fuel Cell Model
: Simulate the fuel cell reactant system
FCVOPT: Simulate the designed vehicle for fuel economy
and acceleration performance
Optimal !(Ist)?
Optimum?
Fuel CellVariables Changed?
61
!"#
$%!&'()&*+,-./(0
$%!&'()&*
-./(0
Optimum?
FCVOPT: Simulate the design
vehicle for fuel economy and acceleration
performance
Fuel CellPerformance Model
: Optimize the Fuel Cell Reactant Control
Fuel Cell Variables Changed?
!"#
$%!&'()&*+,-./(0
$%!&'()&*
-./(0
Old Map
New Map
Yes
Yes
No
No
Figure 3.10: Process Integration
max Pnet = Pst ! Pcp
subject to fuel cell modeling equations
Win " Wmin( pca
pamb)
(3.79)
where theWmin is the minimum mass flow rate determined by the surge control line. The
optimizer continues to determine the optimal oxygen excess ratio, !, for possible stack
currents until the power output reaches the maximum.
61
!"#
$%!&'()&*+,-./(0
$%!&'()&*
-./(0
Optimum?
FCVOPT: Simulate the design
vehicle for fuel economy and acceleration
performance
Fuel CellPerformance Model
: Optimize the Fuel Cell Reactant Control
Fuel Cell Variables Changed?
!"#
$%!&'()&*+,-./(0
$%!&'()&*
-./(0
Old Map
New Map
Yes
Yes
No
No
Figure 3.10: Process Integration
max Pnet = Pst ! Pcp
subject to fuel cell modeling equations
Win " Wmin( pca
pamb)
(3.79)
where theWmin is the minimum mass flow rate determined by the surge control line. The
optimizer continues to determine the optimal oxygen excess ratio, !, for possible stack
currents until the power output reaches the maximum.
New Map
Old Map
Yes
No
Yes
Yes
No
No
Inner Loop
Figure 4. Process integration
increased pressure across the compressor, a temporary reversalflow occurs and the compressor becomes unstable. This unsta-ble phenomenon is called compressor surge. Compressor surge,or compressor stall, can lead to loss of power and serious com-pressor damage [18]. In a compressor map, a surge line connectsthe minimum flow rate points for the entire operating pressurerange. If a compressor operates above the surge line, the com-pressor will surge. Thus, it is standard to employ a surge controlline positioned to the right of the surge line and set the operat-ing point below the control line (Figure 5). Since the maximumefficiency occurs near the surge line, a bigger margin betweenthe surge line and the control line leads to a reduction of poweroutput. In addition, several sophisticated anti-surge controllers,or surge avoidance controllers, can extend the stable region ofcompressors. The controllers, however, also have their own lim-itations due to the control logic and controlling resources. Thus,the control line needs to be set properly in order to prevent per-formance reduction and excessive controller commands. In thisstudy, the control line is set to be close to the surge line.
The inner-loop problem, including the compressor con-straints, can be formulated as
max Pnet= Pst−Pconwith respect toλ(Ifc)subject to fuel cell modeling equations
Win ≥ α2cpWmin( pca
pamb)
Win ≤ α2cpWmax,
(15)
5 Copyright c© 2006 by ASME

Flow(kg/sec)
Pre
ssure
Ratio
78
78
76
76
72
7264
56
48 40
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.091
1.5
2
2.5
3
3.5
Surge Region
surgeline
controlline
Figure 5. Surge and control lines on a compressor map
whereWmin is the minimum mass flow rate determined by thesurge control line andWmax is the maximum mass flow rateof the unscaled compressor. Note that the vehicle (outer-loop)design optimization problem is presented in Section 3.1. Theoptimizer continues to determine the optimal oxygen excess ra-tio λ for possible stack currents until the power output reachesthe maximum. For this nested (inner-loop) optimization, the Se-quential Quadratic Programming (SQP) algorithm, a popular andeffective gradient-based algorithm, is used because of its compu-tational efficiency.
2.4 Fuel Cell VESim Simulation with Dynamic andStatic FC models
In order to validate the fidelity of the quasi-steady fuel cellmodel, two vehicle models, one with a quasi-steady model andone with a full dynamic model, are compared in terms of fueleconomy and tracking performance for several testing cycles.For a full dynamic model, the model developed for the FORDP2000 fuel cell [12] is scaled to make the fuel cell generate thesame amount of power as the quasi-steady model.
Figure 6 shows the simulated vehicle speeds of both mod-els for the EPA Urban Dynamometer Driving Schedule (EPAUDDS). Based on the simulation, agreement is satisfactory. Ta-ble 3 shows the differences in fuel consumption between the twomodels depending on the driving cycle. The maximum dif-ference is smaller than 5%. Typically, the simulation using thequasi-static model is two orders of magnitude faster than the sim-ulation using the full dynamic model. Therefore, it can be con-cluded that the quasi-static model is appropriate for investigatingoverall vehicle performance.
The quasi-static model, however, cannot detect several tran-sient problems, including oxygen starvation and surge. Based
0 200 400 600 800 1000 1200 14000
10
20
30
40
50
60
Velo
city(
mph
)
Time(sec)
with Quasi−steady FC Modelwith Full Dynamic FC Model
Figure 6. Comparison of results of fuel cell vehicle simulator with a full
dynamic fuel cell model and a quasi-steady fuel cell model
Table 3. Comparison between full dynamic model and quasi-steady
model in terms of fuel economy and simulation time
Driving Cycle Full Dynamics Quasi-steadyError
Time Reduction
EPA HWFETfuel economy 16.26mpg 16.73mpg -2.9%
sim. time 500 sec 12 sec 97.6%
EPAUDDSfuel economy 15.81mpg 15.07mpg +4.7%
sim.time 2310 sec 35 sec 98.5 %
US06fuel economy 10.26 mpg 10.46 mpg -1.9 %
sim.time 260 sec 5.3 sec 98.0%
on the simulation results, oxygen starvation problem is not aserious issue because of the power demand limiter in the fuelcell controller. Since oxygen starvation occurs when a sharp in-crease in the power demand happens, the power demand limiterreduces the possibility of oxygen starvation (Figure 7(a)). Fig-ure 7(b) shows the transient response on the compressor map.The compressor surges excessively when the power demand de-creases sharply. Therefore, an additional controller that detectsand prevents surge is required when short-time stability is impor-tant. Since this paper focuses on the overall vehicle performanceduring a relatively long cycle, transient stability is assumed to besatisfied.
3 System Design Optimization and Parametric StudyThe FC vehicle model with battery hybridization and regen-
erative braking is optimized with respect to design variables in-cluding six component size variables and two fuel cell controllimits. Design variables and their bounds are listed in Table 4.One of the most significant benefits of hybrid electric vehicles is
6 Copyright c© 2006 by ASME

64
0 200 400 600 800 1000 1200 14001
1.5
2
2.5
3
3.5
4
time(sec)
Oxyg
en
Exce
ss R
atio
Figure 3.12: Oxygen excess ratio during the cycle
Surging
Region
0 0.01 0.02 0.03 0.04 0.05 0.061
1.2
1.4
1.6
1.8
2
2.2
2.4
Flow(kg/s)
Pre
ssure
Ratio
NominalOperation
TransientVariation
Figure 3.13: Transient response on the compressor map
64
0 200 400 600 800 1000 1200 14001
1.5
2
2.5
3
3.5
4
time(sec)
Oxygen E
xcess R
atio
Figure 3.12: Oxygen excess ratio during the cycle
Surging
Region
0 0.01 0.02 0.03 0.04 0.05 0.061
1.2
1.4
1.6
1.8
2
2.2
2.4
Flow(kg/s)
Pre
ssu
re R
atio
NominalOperation
TransientVariation
Figure 3.13: Transient response on the compressor map
(a) (b)
64
0 200 400 600 800 1000 1200 14001
1.5
2
2.5
3
3.5
4
time(sec)
Oxyg
en
Exce
ss R
atio
Figure 3.12: Oxygen excess ratio during the cycle
Surging
Region
0 0.01 0.02 0.03 0.04 0.05 0.061
1.2
1.4
1.6
1.8
2
2.2
2.4
Flow(kg/s)
Pre
ssure
Ratio
NominalOperation
TransientVariation
Figure 3.13: Transient response on the compressor map
64
0 200 400 600 800 1000 1200 14001
1.5
2
2.5
3
3.5
4
time(sec)
Oxygen E
xcess R
atio
Figure 3.12: Oxygen excess ratio during the cycle
Surging
Region
0 0.01 0.02 0.03 0.04 0.05 0.061
1.2
1.4
1.6
1.8
2
2.2
2.4
Flow(kg/s)
Pre
ssu
re R
atio
NominalOperation
TransientVariation
Figure 3.13: Transient response on the compressor map
(a) (b)
Figure 7. Oxygen excess ratio during the cycle and transient response
on the compressor map
the presence of a regenerative brake, which can transform decel-erating torque into electricity and charge the batteries. Utilizingpower that would be otherwise wasted, a regenerative brake im-proves the efficiency of hybrid vehicles significantly.
3.1 Problem FormulationThe vehicle design optimization problem is formulated as
maximize f (x) = (fuel economy)subject tog1 ≡ (max velocity)≥ 80mph
g2 ≡ (0-60 mph time)≤ 23secg3 ≡ (30-50 mph time)≤ 11secg4 ≡ max{|vveh(t)−vcyc(t)|} ≤ 2mphg5 ≡ |SOCfinal−SOCinitial | ≤ 0.5%
(16)
Since fuel economy is relative to the used driving cycle, EPAUDDS, an urban driving cycle, is chosen in this study to assess
Table 4. Design variables and their lower and upper bounds of optimiza-
tion for hybrid electric FCVs with a regenerative brake
Design Variables Lower Upper
x1: number of cells,nfc 800 2000
x2: compressor scale,αcp 0.5 1.7
x3: motor torque scale,αmot 0.5 1.5
x4: number of battery modules,nbatt 1 60
x5: battery capacity scale,αbatt 0.5 2.5
x6: lower limit of FC power command 0.01 0.4
x7: upper limit of FC power command 0.6 0.99
x8: final gear ratio 1 5
regenerative braking benefits. Acceleration criteria (g1 - g3) aredefined to be the same as those of the baseline diesel vehicle(HMMWV 4.5L International). Maximum discrepancy betweendriving cycle-prescribed speedvcyc(t) and actual vehicle speed,vveh(t) is limited to less than 2 mph in order to ensure track-ing performance during both acceleration and deceleration (g4).The difference between final and initial battery SOC (g5) is alsorestrained to less than 0.5% in order to reduce the effect of theinitial SOC on fuel economy.
3.2 Optimization AlgorithmsBased on a design-of-experiments study, the objective and
constraint functions are found to exhibit considerable numer-ical noise. Noisy responses pose difficulties and challengesto gradient-based optimization algorithms. Therefore, twoderivative-free optimization codes are used in this study for theouter optimization loop: DIRECT (DIvided RECTangles), andNOMADm.
The DIRECT algorithm was developed by Donald Jones[19]. The code in this study is a Matlab implementation of DI-RECT, written by Kenneth Holmstrom for a previously publicdomain optimization toolbox called TOMLAB [20]. An advan-tage of DIRECT is that it does not require any parameter tun-ing. The most significant disadvantage of DIRECT is the lackof a convergence criterion. The algorithm iterates until the user-specified maximum number of function evaluations or iterationsis exceeded. There is a rule of thumb that requires at least 200dfunction evaluations, whered is the number of variables, but thisrule is subject to the curse of dimensionality. DIRECT is nei-ther effective nor efficient when the number of variables is largerthan, say, 10.
NOMADm is the Matlab implementation of the GeneralizedPattern Search (GPS) and Mesh Adaptive Direct Search (MADS)
7 Copyright c© 2006 by ASME

Table 5. Optimization Results
Initial Design DIRECT NOMADmNOMADm
w/o Reg. Brk.
x1 1400 1823 1936 1969
x2 1.1 1.36 1.27 1.27
x3 1 0.83 0.83 0.88
x4 12 30 26 24
x5 1 0.86 1 1
x6 0.1 0.27 0.13 0.05
x7 0.95 0.98 0.79 0.74
x8 3 2.53 2.875 2.875
g1 -0.03 -0.09 -0.07 -0.00
g2 0.17 -0.15 -0.13 -0.15
g3 -0.02 -0.01 -0.00 -0.09
g4 -0.46 -0.57 -0.57 -0.67
g5 9.76 -0.46 -0.06 -0.43
f 21.9 24.9 24.8 21.0
Number of Func. Eval. 1800 491 452
family of derivative-free algorithms for mixed variable program-ming [21]. This family of algorithms have proven convergenceproperties [22, 23]. The NOMADm package offers a variety ofoptions to choose from (including the flexibility of performinga user-defined search and the ability of using derivatives even ifthey are only partially available) to increase the effectiveness ofthe algorithm for a given problem. However, it does not requireexpertise, and the default options can be used with high rate ofsuccess for most problems. Convergence is based on final meshsize. In our experience, NOMADm will find at least as goodsolutions as DIRECT in far fewer function evaluations for mostproblems.
3.3 ResultsThe results are presented in Table 5. It can be seen that the
overall efficiency of the hybrid fuel cell vehicle can be improvedby 14% after optimizing component sizes and control parame-ters. Even though the power management is based on simplerule-based control, the improvement is remarkable. Additionally,the same vehicle is optimized without accounting for regenera-tive braking to verify associated benefits. As expected, a regen-erative brake can improve fuel economy by 18%. Interestingly,there are no significant differences between the optimal vehicledesigns with and without the regenerative brake. On the otherhands, control limitations are affected a lot. For the vehicle witha regenerative brake, the optimizer tends to reduce the operatingrange of the fuel cell. Since the regenerative brake frequentlycharges the batteries, the latter take more power load than bat-teries in a vehicle without a regenerative brake, especially forlow power load cycles, where battery efficiency is considerablyhigher than fuel cell efficiency. Thus, by increasing the lower
limit of the FC power command, the optimizer can improve effi-ciency. This power-splitting trend can be seen clearly in Figure 8.During the cycle, the fuel cell turns off frequently, and the depen-
0 200 400 600 800 1000 1200 14000
50
100
150
Fue
l C
ell
Pow
er
(kW
)
0 200 400 600 800 1000 1200 1400!50
0
50
100
Battery
Po
we
r (k
W)
Time (sec)
0 200 400 600 800 1000 1200 14000
50
100
150
Fue
l C
ell
Po
wer
(kW
)
0 200 400 600 800 1000 1200 1400!100
!50
0
50
100
Ba
ttery
Po
we
r (k
W)
Time (sec)
a) Power drawn from fuel cell and battery in vehicles with regenerative braking
b) Power drawn from fuel cell and battery in vehicles without regenerative braking
Figure 8. Simulation of a hybrid electric fuel cell vehicle model
with/without regenerative braking
dency on batteries is greater. Moreover, the fuel cell power loadbecomes more stable because the batteries buffer the high fre-quency power demand even though the dynamic stability of fuelcell systems is not taken into account in this problem formula-tion. This smooth power load is even more desirable for fuel cellsystem control because it reduces the probability of compressorsurge and oxygen starvation.
Note that the number of cells is large. If we assume that theaverage thickness of each cell is about 1 mm, the length of thefuel cell stack will be more than 1.8 m, which is longer than the
8 Copyright c© 2006 by ASME

width of a small vehicle. The large number of cells is due to thelow power density, which is because the fuel cell voltage modelis based on the FORD P2000 prototype that was manufacturedin 1999. The fuel cell stack in this prototype has 381 cells andgenerates 50 kW, equivalent to 131 W/cell. During the last fiveyears, a tremendous amount of research has been conducted onfuel cell technology, and several new membrane and cell designshave improved the power output per cell significantly. A recentlyreported fuel cell stack can generate 66.5 kW with 450 cells (148W/cell) [24].
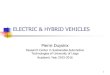
Table 6. Comparison of compressor scales for fuel cell systems that are
optimized for vehicle objectives, maximum power density, and maximum
efficiency (number of cells = 1936)Optimized for Vehicle Max. Power Density Max. Effi.
Compressor Scale 1.27 2.25 0.99
Power Densitya (kW/kg) 0.49 1.03 0.33
Max. Effi. 55% 46% 59%
Ave. Effi. 66% 57% 72%
a Power density is calculated as the maximum power divided by the mass ofthe fuel cell stack and compressor, excluding other auxiliary units.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.091
1.5
2
2.5
3
3.5
Flow(kg/sec)
Pres
sure
Rat
io
Vehicle OptimumMax Power DensityMax Efficiency
Figure 9. Operating points of the fuel cell systems of Table 6
In addition to the old membrane model, the relatively smallcompressor size also decreases power density. Table 6 includescompressor scales for fuel cell systems that are optimized forvehicle objective, maximum power density, and maximum effi-ciency. A tradeoff between power density and efficiency can beobserved depending on compressor size. Looking at the operat-ing points on the compressor maps in Figure 9, the compressorof the fuell cell system optimized for maximum power density
0 0.2 0.4 0.6 0.8 1 1.20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Current Density (A/cm2)
Syste
m E
ffic
iency (
%)
Vehicle Optimum
Max Power Density
Max Efficiency
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Power Ratio (P(Ist
)/Pmax
)
Syste
m E
ffic
ien
cy (
%)
Vehicle Optimum
Max Power Density
Max Efficiency
b) x axis: current densitya) x axis: P(Ist)/Pmax
Figure 10. Efficiency versus power ratio and stack current of the fuel cell
systems of Table 6
operates most efficiently. In spite of the compressor inefficiency,a smaller compressor makes a fuel cell system more efficient be-cause it consumes less power and supplies a smaller mass flowof air that restrict the operation of fuel cell system within only asmaller current density region where the efficiency of fuel cells issignificantly higher (Figure 10). Since the objective of the vehi-cle is equivalent to the overall efficiency, the fuel cell system alsotends to be more efficient, which in turn requires a smaller com-pressor and a large number of cells. The compressor, however,cannot be smaller than the optimal values because the accelera-tion and maximum velocity constraints require the fuel cell sys-tem to have sufficient amount of power. Since the vehicle modelin this paper represents heavy-duty small trucks weighing morethan 4000 kg, the vehicle performance is less sensitive to the in-creased fuel cell system mass compared to passenger car cases.Therefore, at the optimal design, the fuel cell system becomesmore similar to one optimized for maximum efficiency. It is ex-pected that if cost, weight, and packaging constraints are takeninto account, the optimizer will yield a smaller number of cellsand a larger compressor size so that fuel cell power density isincreased.
4 ConclusionA fuel cell vehicle simulation model was developed to
achieve sufficient fidelity and efficiency for design optimization.The model integrates two submodels: a fuel cell system perfor-mance model and a fuel cell vehicle model. In the fuel cell sys-tem performance model, the stoichiometry is optimized to pro-duce the maximum power at given currents for each fuel cellsystem design. By integrating the two models, the efficiency ofthe new model was improved significantly (average 98% reduc-tion in simulation time) without sacrificing accuracy (less than5% error).
The fuel cell vehicle model was used to maximize fuel econ-omy with respect to six component size variables and two controllimits. Two derivative-free optimization algorithms, DIRECTand NOMADm, were used. Fuel economy was improved by14% by balancing the power loads on fuel cell stack and battery
9 Copyright c© 2006 by ASME

modules and the tradeoff between power density and efficiencyof the fuel cell system. Regenerative braking was found to besignificantly beneficial even though it has almost no impact ondesign. Since the vehicle in this paper is less sensitive to compo-nent mass changes, several constraints dealing with cost, weight,and packaging must be considered for a more comprehensive un-derstanding of the overall design tradeoffs.
ACKNOWLEDGMENTThis work was partially supported by a Korea Science and
Engineering Foundation Fellowship, and by the Automotive Re-search Center, a US Army Center of Excellence at the Universityof Michigan. Any opinions expressed in this publication are onlythose of the authors.
REFERENCES[1] J. Larminie and A. Dicks.Fuel Cell System Explained. John
Wiley & Sons Ltd., New York, 2nd edition, 2002.[2] D. Bernardi and M. Verbrugge. Mathematical model of
a gas diffusion electrode bonded to a polymer electrolyte.AIChE Journal, 37(8):1151–1163, 1991.
[3] A. Rowe and X. Li. Mathematical modeling of proton ex-change membrane fuel cells.Journal of Power Sources,102(1-2):82–96, 2001.
[4] T.E. Springer, M.S. Wilson, and S. Gottesfeld. Modelingand experimental diagnostics in polymer electrolyte fuelcells. Journal of Electrochemical Society, 140(12):3513–3526, 1993.
[5] J.C. Amphlett, R.M. Baumert, R.F. Mann, B.A. Peppley,and P.R. Roberge. Performance modeling of the ballardmark IV solid polymer electrolyte fuel cell.Journal ofElectrochemical Society, 142(1):1–8, 1995.
[6] J. Baschuk and X. Li. Modelling of polymer electrolytemembrane fuel cells with variable degrees of water flood-ing. Journal of Power Sources, 86:181–196, 2000.
[7] H. Bussel, F. Koene, and R. Mallant. Dynamic modelof solid polymer fuel cell water management.Journal ofPower Sources, 71:218–222, 1998.
[8] P. Berg, K. Promislow, J. Pierre, and J. Stumper. Watermanagement in pem fuel cells.Journal of ElectrochemicalSociety, 151(3):A341–A353, 2004.
[9] J.C. Amphlett, R.F. Mann, B.A. Peppley, P.R. Roberge,and A. Rodrigues. Model predicting transient responsesof proton exchange membrane fuel cells.Journal of PowerSources, 61:183–188, 1996.
[10] M. Wohr, K. Bolwin, W. Schnurnberger, M. Fischer,W. Neubrand, and G. Eigenberger. Dynamic modelling andsimulation of a polymer membrane fuel cell including masstraksport limitation.International Journal of Hydroyen En-ergy, 23(3):213–218, 1998.
[11] Z.H. Wang, C.Y. Wang, and K.S. Chen. Two-phase flowand transport in the air cathode of proton exchange mem-brane fuel cells.Journal of Power Sources, 94:40–50, 2001.
[12] Jay T. Pukrushpan, Anna G. Stefanopoulou, and Huei Peng.Control of Fuel Cell Power Systems: Principles, Modeling,Analysis and Feedback Design. Springer, 2004.
[13] D. Xue and Z. Dong. Optimal fuel cell system designconsidering functional performance and production costs.Journal of Power Sources, 76(1):69–80, 1998.
[14] A. Mawardi, F. Yang, and R. Pitchumani. Optimization ofthe operating parameters of a proton exchange membranefuel cell for maximum power density.Journal of Fuel CellScience and Technology, 2(2):121–135, 2005.
[15] J. Cunningham, M. Hoffman, R. Moore, and D. Friedman.Requirements for a flexible and realistic air supply modelfor incorporation into a fuel cell vehicle (fcv) system sim-ulation.Future Transportation Technology Conference andExposition, Costa Mesa, California, August 17-19 1999.1999-01-2912.
[16] D. Assanis, Z. Filipi, S. Gravante, D. Grohnke, L. Louca,G. Rideout, J. Stein, and Y. Wang. Validation and use ofsimulink integrated, high fidelity, engine-in-vehicle simu-lation of the international class VI truck.SAE Paper, 2000-01-0288.
[17] T. Markel, A. Brooker, T. Hendrickes, V. Johnson, K. Kelly,B. Kramer, M. O’Keefe, S. Sprik, and K. Wipke.ADVI-SOR: a system analysis tool for advanced vehicle modeling,2002.
[18] K. Murphy, P. Kalata, R. Fischl, and D. Marchio. On mod-eling surge avoidance controllers (sac) in compressors: De-sign procedure.Proceedings of the American Control Con-ference, Seatle, Washington, June 1995. TP2-3:50.
[19] D. Jones. Direct. InEncyclopedia of Optimization. KluwerAcademic Publishers, 1999.
[20] K. Holmstrom. gclsolve.m: A standalone version of direct,software documentation, revision 2.00. HKH MatrisAnalysAB, Sweden, 1989.
[21] M. Abramson. NOMADm version 3.31 and user’s guide.http://en.afit.edu/ENC/Faculty/MAbramson/NOMADm.html,accessed on April 2005.
[22] C. Audet and J.E. Dennis Jr. Mesh adaptive direct searchalgorithms for constrained optimization.SIAM Journal onOptimization. To appear.
[23] M.A. Abramson, C. Audet, and J.E. Dennis Jr. Generalizedpattern searches with derivative information.MathematicalProgramming, 100(1):3 – 25, 2004.
[24] J. Cunningham, R. Moore, and S. Ramaswamy. A com-parison of energy use for a direct-hydrogen hybrid versusa direct-hydrogen load-following fuel cell vehicle.SAEWorld Congress, Detroit, Michigan, March 3-6 2003. Paperno. 2003-01-0416.
10 Copyright c© 2006 by ASME