Embed Size (px)
Citation preview

ON ARCHITECTURE AND FORMALISMS FOR COMPUTER-ASSISTEDIMPROVISATION
Fivos Maniatakos * ** Gerard Assayag * Frederic Bevilacqua ** Carlos Agon** Music Representation group (RepMus)
** Real-Time Musical Interactions team (IMTR)IRCAM, UMR-STMS 9912
ABSTRACT
Modeling of musical style and stylistic re-injection strate-gies based on the recombination of learned material havealready been elaborated in music machine improvisationsystems. Case studies have shown that content-dependantregeneration strategies have great potential for a broad andinnovative sound rendering. We are interested in the studyof the principles under which stylistic reinjection could besufficiently controlled, in other words, a framework thatwould permit the person behind the computer to guide themachine improvisation process under a certain logic. Inthis paper we analyze this three party interaction schemeamong the isntrument player, the computer and the com-puter user. We propose a modular architecture for Com-puter Assisted Improvisation (CAO). We express stylisticreinjection and music sequence scheduling concepts undera formalism based on graph theory. With the help of theseformalisms we then study a number problems concerningtemporal and qualitative control of pattern generation bystylistic re-injection.
1. INTRODUCTION
New computer technologies and enhanced computation ca-pabilities have brought a new era in real-time computermusic systems. It is interesting to see how artificial in-telligence (AI) technology has interacted with such sys-tems, from the early beginning until now, and the effectthat these enhancements have had when setting the ex-pectations for the future. In the 2002’s review paper [1],computer music systems are organized in three major cate-gories: (1) Compositional, (2) Improvisational and (3) Per-formance systems. Concerning the limits between what wecall computer improvisation and computer performance,the authors of [1] state the following:
“... Although it is true that the most fundamental char-acteristic of improvisation is the spontaneous, real-time,creation of a melody, it is also true that interactivity was notintended in these approaches, but nevertheless, they couldgenerate very interesting improvisations.”
Copyright: c©2010 Maniatakos et al. This is an open-access article distributed
under the terms of the Creative Commons Attribution License 3.0 Unported, which
permits unrestricted use, distribution, and reproduction in any medium, provided
the original author and source are credited.
According to [1], first improvisation systems did notaddress directly interactivity issues. Algorithmic compo-sition of melodies, adapatation in harmonic background,stochastic processes, genetic co-evolution, dynamic sys-tems, chaotic algorithms, machine learning and natural lan-guage processing techniques constitute a part of approachesthat one can find in literature about machine improvisation.However, most of these machine improvisation systems,even with interesting sound results either in a pre-definedmusic style or in the form of free-style computer synthesis,did not address directly the part of interaction with human.
During the last years, achievements in Artificial Intelli-gence and new computer technologies have brought a newera in real-time computer improvisation music systems.Since real-time systems for music have provided the frame-work to host improvisation systems, new possibilities haveemerged concerning expressiveness of computer improvi-sation, real-time control of improvisation parameters andinteraction with human. These have resulted to novel im-provisation systems that establish a more sophisticated com-munication between the machine and the instrument player.Some systems have gone even further in terms of interac-tivity by envisaging a small participation role for the com-puter user.
However, as for the interaction design of many of thesesystems, the role of the computer user in the overall in-teraction scheme often seems to be neglected, sometimeseven ignored. What is the real degree of communicationthat machines achieve to establish with the instrument play-ers in a real-world improvisation environment? Is the studyof bipartite communication between instrument player -computer sufficient enough to model real-world compleximprovisation schemes? More importantly, do modern com-puter improvisation system really manage to exploit thepotential of this new form of interactivity, that is, betweenthe computer and its user? And what would be the theo-retical framework for such an approach that would permita double form of interactivity between (1) computer andinstrument player (2) computer and its user?
In our research we are concerned with the aspects of en-hanced interactivity that can exist in the instrument instru-ment player - computer - user music improvisation frame-work. We are interested particularly on the computer - usercommunication channel and on the definition of a theoret-ical as well as of a the computational framework that canpermit such a type of interaction to take place in real-time.Such a framework differs from the conventional approach

of other frameworks for machine improvisation in that thecomputer user takes an active role in the improvisation pro-cess. We call the context we study Computer Assisted Im-provisation (CAI), due to the shift of the subject role fromthe computer to the computer user.
Later in this report, we propose a model for three-partyinteraction in collective improvisation and present an ar-chitecture for Computer Assisted Improvisation. We thenintroduce a formalism based on graph theory in order toexpress concepts within computer assisted improvisation.This formalism succeeds in expressing unsupervised, content-dependant learning methods as well as the concept of “stylis-tic re-injection for the pattern regeneration, furthered en-riched with new features for user control and expressivity.Through a bottom-up approach we analyze real-world se-quence scheduling problems within CAI and study theirresolvability in terms of space and time complexity. Inthis scope we present a number of real world music im-provisation problems and show how these problems can beexpressed and studied in terms of graph theory. Finally wegive notions about our implementation framework GrAIPE(Graph assisted Interactive Performance Environment) inthe real-time system Max-MSP, as well as about future re-search plans.
2. BACKGROUND
One of the first models for machine improvisation appearedin 1992 under the name Flavors Band [4]. Flavors Banda procedural language for specifying jazz and procedu-ral music styles. Despite the off-line character of the ap-proach, due to which one could easily classify the sys-tem to the computer-assisted composition domain, the ad-vanced options for musical content variation and phrasegeneration combined with musically interesting results in-spired later systems of machine improvisation. In the com-puter assisted improvisation context, the interaction paradigmproposed by Flavors Band could be regarded as a contribu-tion of major importance, due to the fact that it assignsthe computer user with the role of the musician who takeshigh-level offline improvisation decisions according to ma-chine’s proposals. Adopting a different philosophy as forthe approach, GenJam [6] introduced the use of geneticalgorithms for machine improvisation, thus being the ‘fa-ther’ of a whole family of improvisation systems in thecadre of evolutionary computer music. Such systems makeuse of evolutionary algorithms in order to create new solos,melodies and chord successions. It was also one of the firstsystems for music companion during performance. Evolu-tionary algorithms in non supervised methods were intro-duced by Papadopoulos and Wiggins in 1998 [9]. Morerecent learning methods include reccurent neural networks[5], reinforcement learning [11], or other learning tech-niques such as ATNs (Augmented Transition Networks)[7] and Variable order Markov Chains [12].
Thom with her BAND-OUT-OF-A-BOX(BOB) system[2] addresses the problem of real-time interactive impro-visation between BOB and a human player. Sever yearslater, the LAM (Live Algorithms for Music) Network’smanifesto underlines the importance of interactivity, un-
der the term autonomy which should substitute the one ofautomation. In [14] the LAM manifesto authors describethe Swarm Music/Granulator systems, which implements amodel of interactivity derived from the organization of so-cial insects. They give the term ‘reflex systems’ to systemswhere ‘incoming sound or data is analysed by software anda resultant reaction (e.g. a new sound event) is determinedby pre-arranged processes.’ They further claim that thiskind of interaction is ‘weakly interactive because there isonly an illusion of integrated performer-machine interac-tion, feigned by the designer’. With their work, inspired bythe animal interaction paradigm, they make an interestingapproach to what has prevailed to mean ‘human - computerinteraction’ and bring out the weak point inside real-timemusic systems’ design. However, even if they provide thecomputer user with a supervising role for the improvisationof the computer, they don’t give more evidence about howa three party interaction among real musician - machine -computer user could take place. Merely due to the fact thatthey consider their machine autonomous. But if the hu-man factor is important for a performance, this should refernot only to the instrument player but to the person behindthe computer as well. At this point, it seems necessary tostudy thoroughly the emerging three party interaction con-text where each of the participants has an independent andat the same time collaborative role.
Computer - computer user interaction is studied insteadin the framework of live electronics and live coding, un-der the ‘laptop-as-instrument’ paradigm. In [15], the au-thor describes this new form expression in computer mu-sic and the challenges of coding music on the fly withinsome established language for computer music or withina custom script language. The most widespread are prob-ably the aforementioned SuperCollider [19], a Smalltalkderived language with C-like syntax, and most recentlyChucK, a concurrent threading language specifically de-vised to enable on-the-fly programming [20]. Live cod-ing is a completely new discipline of study, not only formusic but also for computer science, phsycology and Hu-man Computer Interaction as well. Thus, it seems -for themoment- that live coding is constrained by the expressivitylimitations of the existing computer languages, and that itfinds it difficult to generalize to a more complicated inter-action paradigm which could also involve musicians withphysical instruments.
2.1 OMax and stylistic reinjection
An interaction paradigm which is of major interest for ourresearch is this of the stylistic reinjection, employed bythe OMax system [3]. OMax is a real-time improvisa-tion system which use on the fly stylistic learning meth-ods in order to capture the playing style of the instrumentplayer. Omax is an unsupervised, context-dependant per-forming environment, the last stating that it does not havepre-accuired knowledge but builds its knowledge networkon the fly according to the special features of the player’sperformance. The capacity of OMax to adapt easily to dif-ferent music styles without any preparation, together withits ability to treat audio directly as an input through the

employment of efficient pitch tracking algorithms, makeOMax a very attractive environment for computer impro-visation.
It is worth pointing out that style capturing is made withthe help of the Factor Oracle Incremental Algorithm, in-truduced by Allauzen and al. in [13], which repeatedlyadds knowledge in an automaton called Factor Oracle (FO).Concerning the generation process, this is based on FO andis extensively described in [3]. With the help of forest ofSuffix Link Trees (SLTs) it is possible to estimate a Re-ward Function in order to find interconnections betweenrepeated patterns, which is the key for the pattern gener-ation. Through this method, one can construct a modelthat continuously navigates within an FO. By balancinglinear navigation with pivots and adding a little of non-determinism to the Selection Function decisions, the sys-tem can navigate for ever by smoothly recombining exist-ing patterns. Due to the short-term memory effect, this re-combination is humanly perceived as a generation, which,more importantly, preserves the stylistic properties of theoriginal sequence. The creators of the system call thismethod stylistic reinjection: this method relies on recol-lecting information from the past and re-injecting it to thefuture under a form which is consistent to the style of theoriginal performance. Based on this principle and employ-ing further heuristic and signal processing techniques torefine accordingly selections and sound rendering, OMaxsucceeds musically in a collective, real-world improvisa-tion context.
Finally, OMax provides a role for the computer user aswell. During a performance, user can change on the fly anumber improvisation parameters, such as the proportionbetween linear navigation and pivot transitions, the qual-ity of transitions according to common context and rhythmsimilarity, define the area of improvisation and cancel im-mediately the system’s event scheduling tasks in order toaccess directly a particular event of the performance andreinitiate all navigation strategies.
2.2 The Continuator
An other system worth mentioning is The Continuator [12].Based on variable-order Markov models, the system’s pur-pose was to fill the gap between interactive music systemsand music imitation systems. The system, handling exceptfor pitch also polyphony and rhythm, provides content-dependent pattern generation in real-time. Tests with jazzplayers, as well with amateurs and children showed that itwas a system of major importance for the instrument player- computer interaction scheme.
3. MOTIVATION
In this point, it is interesting to have a look over interactionaspects between the musician and the machine. Maintain-ing style properties assures that similar type of informationtravels in both directions throughout the musician - ma-chine communication channel, which is a very importantprerequisite for interaction. Moreover, diversity in musi-cal language between machines and physical instrument
playing, is one of the main problems encountered by evo-lutionary improvisation systems. OMax deals well withthis inconvenience, in the sense that the patterns being re-generated and the articulation within time is based on themusic material played the performer. However, when forinteraction one should study not only information streamsbut also design of modules responsible for the Interpreta-tion of received information [14]. In the case of the in-strument player, human improvisors can interpret informa-tion according to their skills developed by practicing withthe instrument, previous improvisational encounters andstylistic influences. These skills allow -or not- reacting tosurprise events, for instance a sudden change of context.Concerning the machine, OMax disposes an interpretationscheme that stores information in the form FO represen-tation. The question that arises concerns the capability ofthis scheme to handle surprise. This question can be gener-alized as follows: Can stylistic reinjection approach adaptits pre-declared generation strategies to short-time memoryevents? The last implies the need for an specifically con-figured autonomous agent capable of detecting short-timememory features of a collective improvisation, understand-ing their musical nuance and transmitting information tothe central module of strategy generation.
Concerning stylistic reinjection, this approach currentlypermits a several amount of control of the overall process.We described in previous section the computer user’s rolein the OMax improvisation scenario. However, It seemsintriguing to investigate further the role the computer usercan have in such a scenario. For instance, wouldn’t itbe interesting if the computer user could decide himselfthe basic features of a pattern? Or if he could schedulea smooth passage in order that the computer arrives in aspecific sound event within a certain time or exactly at atime?
We believe that the study of three-party interaction amongcan be beneficial for machine improvisation. In particular,we are interested in the ‘forgotten’ part of computer - com-puter user interaction, for which we are looking forward toestablishing a continuous dialog interaction scheme. Ourapproach is inspired from the importance of the human fac-tor in a collective performance between humans and ma-chines, where humans are either implicitly (musicians) orexplicitly (computer users) interacting with the machines.Though this three party interaction scheme, computer useris regarded as an equal participant to improvisation.
With respect to existing systems, our interest is to en-hance the role of the computer user from the one of su-pervisor to the one of performer. In this scope, insteadof controlling only low level parameters of computer ’simprovisation, the user is set responsible of providing thecomputer with musical, expressive information concerningthe structure and evolution of the improvisation. Inversely,the computer has a double role: first, the one of an aug-mented instrument, which understands the language of theperformer and can regenerate patterns in a low level and ar-ticulate phrases coherent to user’s expressive instructions,and second, the one of an independent improvisor, able torespond reflexively to specific changes of music context orto conduct an improvisation process with respect to a pre-

specified plan.Our work consists of setting the computational frame-
work that would permit such operations to take place. Thisincludes:1) the study of the interaction scheme, 2) the ar-chitecture for such an interaction scheme 3) an universalrepresentation of information among the different partici-pants and 4) a formalism to express and study specific mu-sical problems, their complexity, and algorithms for theirsolution.
4. ARCHITECTURE
In this section we analyze three-party interaction in CAIand propose a computational architecture for this interac-tion scheme.
4.1 Three party interaction scheme
In figure 1, one can see the basic concepts of three party in-teraction in CAI. The participants in this scheme are three:the musician, the machine (computer) and the performer.Communication among the three is achieved either directly,such as the one between the performer and the computer, orindirectly through the common improvisation sound field.The term sound field stands for the mixed sound prod-uct of of all improvisers together. During an improvisa-tion session, both the musician and the performer receivea continuous stream of musical information, consisting ofa melange of sounds coming from all sources and thrownin the shared sound field canvas. They manage to interpretincoming information through human perception mecha-nisms. This interpretation includes the separation of thesound streams and the construction of an abstract internalrepresentation inside the human brain about the low andhigh level parameters of each musical flux as well as thedynamic features of the collective improvisation. Duringsession, the musician is in a constant loop with the ma-chine. He listens to its progressions and responds accord-ingly. The short-time memory human mechanisms pro-vides her/him with the capacity to continuously adapt tothe improvisation decisions of the machine and the evolu-tion of the musical event as a group, as well as with theability to react to a sudden change of context.
On the same time, the machine is listening to the mu-sician and constructs a representation about what he hasplayed. This is one of the standard principles for humanmachine improvisation. Furthermore, machine potentiallyadapts to a mid-term memory properties of musician’s play-ing, thus reinjecting stylistically coherent patterns. Duringall these partial interaction schemes, the performer behindthe computer, as a human participant, is also capable of re-ceiving and analyzing mixed-source musical information,separating sources and observing the overall evolution.
The novelty of our architecture relies mainly on the con-cept behind performer - machine’s communication. In-stead of restricting the performer’s role to a set of deci-sions to take, our approach aims to subject the performerin a permanent dialog with the computer. In other words,instead of taking decisions, the performer ‘discusses’ hisintentions with the computer. First, he expresses his inten-tions to the system under the form of musical constraints.
These constraints concern time, dynamics, articulation andother musical parameters and are set either statically or dy-namically. As a response, the computer proposes certainsolutions to the user, often after accomplishing complexcalculi. The last evaluates the computer’s response and ei-ther makes a decision or launches a new query to the ma-chine. Then the machine has either to execute performer’sdecision or to respond to the new query. This procedureruns permanently and controls the improvisation. An otherimportant concept in our architecture concerns the com-puter’s understanding of the common improvisation soundfield. This necessity arises from the fact that despite forcomputer’s ability to ‘learn’, in a certain degree, the stylis-tic features of the musician’s playing, the last does notstand for the understanding of the overall improvisation.Thus, There has to be instead a dedicate mechanism thatassures interaction between the machine and the collectivemusic improvisation. Moreover, such a mechanism can bebeneficial for the performer - machine interaction as well,as it can make the computer more ‘intelligent’ in his dialogwith the performer.
4.2 General architecture for Computer AssistedImprovisation
However, for the conception of an architecture for CAIthat permits three party interaction, there are a couple ofimportant issues to take into account. First, the fact thatthe proposed interaction scheme is gravely constrained intime, due to the fact that all dialogs and decisions are to betaken in real time ( though in the soft sense). Second, thecomputer should be clever enough to provide high-level,expressive information to the performer about the improvi-sation, as well as high level decision making tools.
The internal architecture for the computer system is shownin figure 2. This architecture consist mainly of six moduleswhich can act either concurrently or sequentially. On thefar left we consider the musician, who feeds informationto two modules: the pre-processing module and the short-term memory module. The pre-processing module is re-sponsible for the symbolic encoding of audio informationand stylistic learning. On the far right part of the figure wesee the renderer, the unit that sends audio information tothe collective sound field.
The short-memory processing module serves the under-standing of the short-term memory features of collectiveimprovisation. In order to reconstruct internally a com-plete image for the improvisation’s momentum, this mod-ules gathers information both from the representation mod-ule and the scheduler; the first in order to know what is be-ing played by the musician and the second for monitoringcomputer’s playing in short-term. It is possible that in thefuture it will be needed that the short-term memory pro-cessing module will also include an independent audio andpitch tracking pre-processor in order to reduce the portionof time required for the detection of surprise events.
In the low-center part of figure 2 one can find the in-teraction core module. This core consists of a part that isresponsible for interfacing with the performer and a solverthat responds to his questions. The performer lances queries
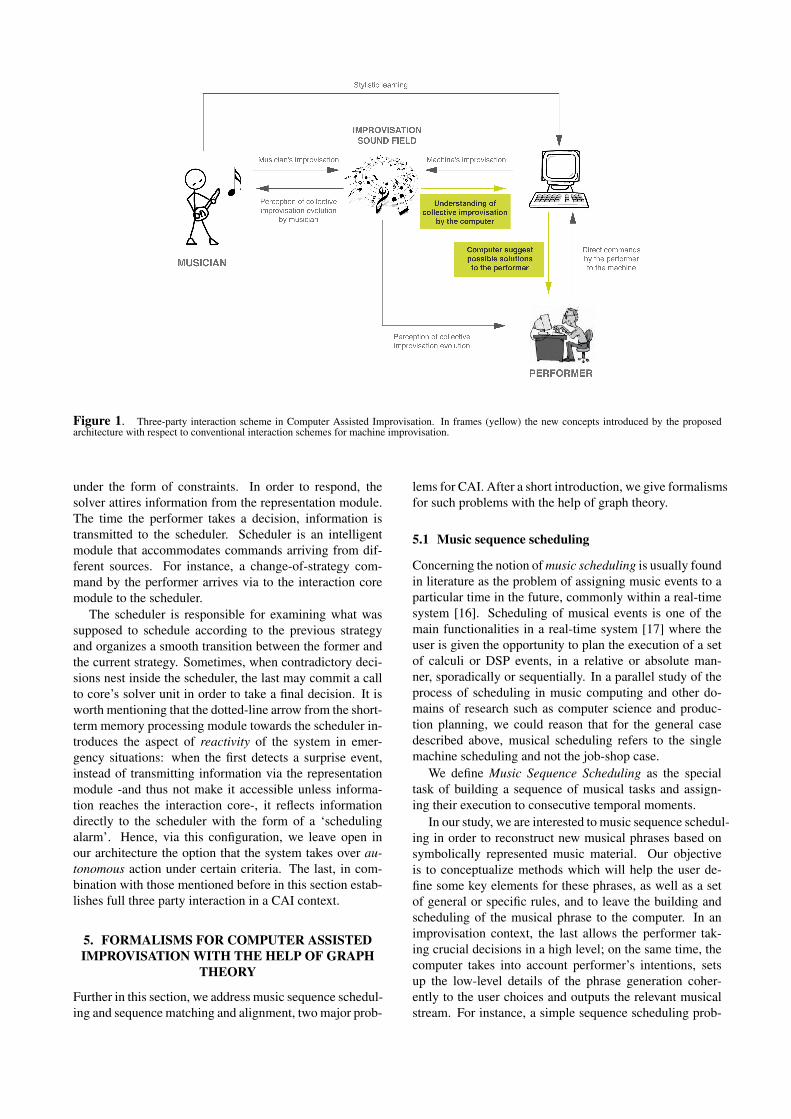
Figure 1. Three-party interaction scheme in Computer Assisted Improvisation. In frames (yellow) the new concepts introduced by the proposedarchitecture with respect to conventional interaction schemes for machine improvisation.
under the form of constraints. In order to respond, thesolver attires information from the representation module.The time the performer takes a decision, information istransmitted to the scheduler. Scheduler is an intelligentmodule that accommodates commands arriving from dif-ferent sources. For instance, a change-of-strategy com-mand by the performer arrives via to the interaction coremodule to the scheduler.
The scheduler is responsible for examining what wassupposed to schedule according to the previous strategyand organizes a smooth transition between the former andthe current strategy. Sometimes, when contradictory deci-sions nest inside the scheduler, the last may commit a callto core’s solver unit in order to take a final decision. It isworth mentioning that the dotted-line arrow from the short-term memory processing module towards the scheduler in-troduces the aspect of reactivity of the system in emer-gency situations: when the first detects a surprise event,instead of transmitting information via the representationmodule -and thus not make it accessible unless informa-tion reaches the interaction core-, it reflects informationdirectly to the scheduler with the form of a ‘schedulingalarm’. Hence, via this configuration, we leave open inour architecture the option that the system takes over au-tonomous action under certain criteria. The last, in com-bination with those mentioned before in this section estab-lishes full three party interaction in a CAI context.
5. FORMALISMS FOR COMPUTER ASSISTEDIMPROVISATION WITH THE HELP OF GRAPH
THEORY
Further in this section, we address music sequence schedul-ing and sequence matching and alignment, two major prob-
lems for CAI. After a short introduction, we give formalismsfor such problems with the help of graph theory.
5.1 Music sequence scheduling
Concerning the notion of music scheduling is usually foundin literature as the problem of assigning music events to aparticular time in the future, commonly within a real-timesystem [16]. Scheduling of musical events is one of themain functionalities in a real-time system [17] where theuser is given the opportunity to plan the execution of a setof calculi or DSP events, in a relative or absolute man-ner, sporadically or sequentially. In a parallel study of theprocess of scheduling in music computing and other do-mains of research such as computer science and produc-tion planning, we could reason that for the general casedescribed above, musical scheduling refers to the singlemachine scheduling and not the job-shop case.
We define Music Sequence Scheduling as the specialtask of building a sequence of musical tasks and assign-ing their execution to consecutive temporal moments.
In our study, we are interested to music sequence schedul-ing in order to reconstruct new musical phrases based onsymbolically represented music material. Our objectiveis to conceptualize methods which will help the user de-fine some key elements for these phrases, as well as a setof general or specific rules, and to leave the building andscheduling of the musical phrase to the computer. In animprovisation context, the last allows the performer tak-ing crucial decisions in a high level; on the same time, thecomputer takes into account performer’s intentions, setsup the low-level details of the phrase generation coher-ently to the user choices and outputs the relevant musicalstream. For instance, a simple sequence scheduling prob-
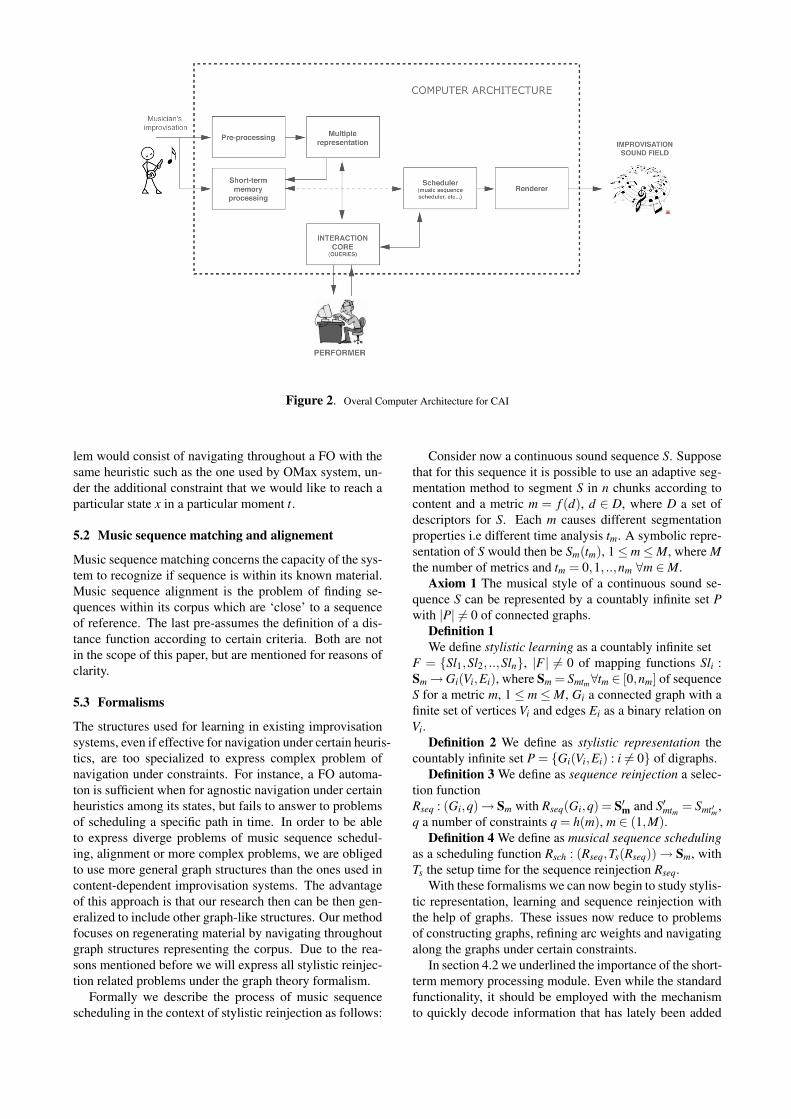
Figure 2. Overal Computer Architecture for CAI
lem would consist of navigating throughout a FO with thesame heuristic such as the one used by OMax system, un-der the additional constraint that we would like to reach aparticular state x in a particular moment t.
5.2 Music sequence matching and alignement
Music sequence matching concerns the capacity of the sys-tem to recognize if sequence is within its known material.Music sequence alignment is the problem of finding se-quences within its corpus which are ‘close’ to a sequenceof reference. The last pre-assumes the definition of a dis-tance function according to certain criteria. Both are notin the scope of this paper, but are mentioned for reasons ofclarity.
5.3 Formalisms
The structures used for learning in existing improvisationsystems, even if effective for navigation under certain heuris-tics, are too specialized to express complex problem ofnavigation under constraints. For instance, a FO automa-ton is sufficient when for agnostic navigation under certainheuristics among its states, but fails to answer to problemsof scheduling a specific path in time. In order to be ableto express diverge problems of music sequence schedul-ing, alignment or more complex problems, we are obligedto use more general graph structures than the ones used incontent-dependent improvisation systems. The advantageof this approach is that our research then can be then gen-eralized to include other graph-like structures. Our methodfocuses on regenerating material by navigating throughoutgraph structures representing the corpus. Due to the rea-sons mentioned before we will express all stylistic reinjec-tion related problems under the graph theory formalism.
Formally we describe the process of music sequencescheduling in the context of stylistic reinjection as follows:
Consider now a continuous sound sequence S. Supposethat for this sequence it is possible to use an adaptive seg-mentation method to segment S in n chunks according tocontent and a metric m = f (d), d ∈ D, where D a set ofdescriptors for S. Each m causes different segmentationproperties i.e different time analysis tm. A symbolic repre-sentation of S would then be Sm(tm), 1≤m≤M, where Mthe number of metrics and tm = 0,1, ..,nm ∀m ∈M.
Axiom 1 The musical style of a continuous sound se-quence S can be represented by a countably infinite set Pwith |P| 6= 0 of connected graphs.
Definition 1We define stylistic learning as a countably infinite set
F = {Sl1,Sl2, ..,Sln}, |F | 6= 0 of mapping functions Sli :Sm→Gi(Vi,Ei), where Sm = Smtm∀tm ∈ [0,nm] of sequenceS for a metric m, 1≤ m≤M, Gi a connected graph with afinite set of vertices Vi and edges Ei as a binary relation onVi.
Definition 2 We define as stylistic representation thecountably infinite set P = {Gi(Vi,Ei) : i 6= 0} of digraphs.
Definition 3 We define as sequence reinjection a selec-tion functionRseq : (Gi,q)→ Sm with Rseq(Gi,q) = S′m and S′mtm = Smt ′m ,q a number of constraints q = h(m), m ∈ (1,M).
Definition 4 We define as musical sequence schedulingas a scheduling function Rsch : (Rseq,Ts(Rseq))→ Sm, withTs the setup time for the sequence reinjection Rseq.
With these formalisms we can now begin to study stylis-tic representation, learning and sequence reinjection withthe help of graphs. These issues now reduce to problemsof constructing graphs, refining arc weights and navigatingalong the graphs under certain constraints.
In section 4.2 we underlined the importance of the short-term memory processing module. Even while the standardfunctionality, it should be employed with the mechanismto quickly decode information that has lately been added

to the representation, make comparisons with earlier addedperformance events and find similarities.
Definition 5 We define Music Sequence Matching (MSM)as a matching function M : (Sm,S′m)→ [0,1] , where Sm,S′m symbolic representations of sequences S and S′ for thesame metric m.
Definition 6 We define Music Sequence Alignment (MSA)the alignment function A : (Sm,S′m,q)→ R where
A(Sm,S′m,q) = min{∑q
cqxq}, (1)
Sm,S′m symbolic representations of sequences S and S′ re-spectively for the same metric m, q a number of string op-erations, cq ∈R a coefficient for an operation q and xq ∈ Zthe number of occurrences of operation q.
With the help of the previous definitions we are readyto cope with specific musical problems.
6. A SIMPLE PROBLEM ON STYLISTICREINJECTION IN CAI
ProblemLet a musical sequence S symbolically represented as
Sn, n ∈ [0,N], and s, t ∈ [0,N] a starting and target pointsomewhere within this sequence. Starting from point s,navigate the quickest possible until the target t, while re-specting sequence’s stylistic properties.
Definition 7 With the help of axiom 1 and definitions1, 2, we apply stylistic learning and create a stylistic rep-resentation digraph G(V,E) for Sn with set of vertices V ={0,1, ..N} and E the set of edges of G.
We define as Music Transition Graph (MTG) the di-graph G with the additional following properties:
1. G is connected with no self loops and |V |−1≤ |E| ≤(|V |−1)2 + |V |−1
2. every ei, j ∈ E represents a possible transition fromvertex i to j during navigation with cost functionwτ(i, j)
3. for every i∈ [0,N−1] there is at least one edge leav-ing vertex i ei,i+1.
4. let d(i) the duration of a musical event Si ∈ S, d0 = 0.The cost function of an edge ei, j ∈ E is defined as:
• wτ(i, j) = d( j), if j = i+1, ∀i, j ∈ (0,N)
• wτ(i, j) = 0, if j 6= i+1, ∀i, j ∈ [0,N]
• wτ(0,1) = 0.
Solution to problemLet a path p =< i0, i1, .., ik > in a graph G′ and the
weight of path p the sum of the weights of its constituentedges:
w(p) =k
∑j=1
w(i j−1, i j). (2)
We define the shortest-path weight from s to t by:
0 A_10 D_8B_21.5 A_4
0
A_6
0
C_3 1 B_7
0
4 D_5 2
0
0
3 4 1
Figure 3. A Music Transition Graph for melody ABCADABD. Arcweights correspond to the note duration of the source. Bidirectional arcsabove and below nodes connect patterns with common context.
δ (s, t) = min{w(p) : s p t}. (3)
Let a MTG G to stylistically represent the sequence Sn.This graph is connected, with no self loops and no negativeweights. Given that, from definition 7, wτ(i, j) is strictlyby the duration d(i, j) of graph events, our problem con-sists of finding a MTG’s shortest path problem. The so-lution for the MTG shortest path exists and can be foundin polynomial time. One of the most known solutions tothis problem can be found with the help of Dijkstra’s al-gorithm, with complexity O(logV ). Dijkstra’s algorithmdoes not solve the single pair shortest-path problem dire-cly, it solves instead the single-source shortest path prob-lem, however no algorithms for the single pair shortest pathproblem are known that run asymptotically faster than thebest single-source algorithms in the worst case.
Corollary from solutionGiven a music sequence, the MTG representation per-
mits solving the problem of accessing from a musical events a musical event t within a music sequence S in the lesspossible time. Thus, by recombining musical events withinS, we can reproduce a novel sequence from s to t. On thesame time, this sequence respects the network of the MTGgraph, hence the stylistic properties of the original musicsequence.
Application 1Suppose a music melody S{A,B,C,A,D,A,B,D}, with
durations dS{1.5,1,4,2,3,4,1,2.5}.We construct a MTG G(V,E) with edges e(i, j) ∈ E
with for e(i, j) : j 6= i+1 the arc connect common contextaccording to the metric m = PITCH (figure 3).
Suppose that our problem is to find the quickest possi-ble transition from vertex s = 2 (note B ) to vertex t = 8(note D). To solve our problem, we can apply Dijkstra’salgorithm.
We apply the algorithm for our sequence S and state D.When the algorithm terminates we have the shortest pathsfor all graph vertices. We can resume that for our problemthe solution is the path p =< B2,B7,D8 >. For the navi-gation along a path, we ignore one of two interconnectedcomponents. Hence, the final path is p′ =< B2,D8 >.
We presented the formalisms and the solution to thesimplest sequence scheduling problem. In our research,we focus on a number of problems that we are treatingwith the same methodology. These problems are combi-nation of problems in sequence scheduling and sequencealignment domain. A list of the more important ones thatwe are dealing with is as follows:

1)Find the shortest path in time from a state s to a statet (examined).
2) The same with problem 1 with the constraint on thelength of common context during recombinations.
3) Find the shortest path in time from a state s to a givensequence .
4) Find the continuation relatively to given sequence(Continuator).
5)The same with problem 1 with the additional con-straint on the total number of recombinations.
6)Find a path from a state s to a state t with a givenduration t, with t1 ≤ t ≤ t2.
7)Find a path from a state s to a state t with a given du-ration t, with t1 ≤ t ≤ t2 and with the additional constrainton the total number of recombinations (problem 5 + 6)
7. GRAIPE FOR COMPUTER ASSISTEDIMPROVISATION
Our algorithms and architecture, are integrated in an underdevelopment software under the name GrAIPE. GrAIPEstands for Graph Assisted Interactive Performance Envi-ronment. It is an ensemble of modular objects for max-mspimplementing the architecture presented in section 4.2. Con-cerning GrAIPE’s design and implementation, our basicpriorities are intelligent interfacing to the performer andefficient well-implemented algorithms for concurrency, in-teraction and the system’s core main functions. Whetherthe software is under development, an instantiation of GrAILhas already taken place under the name PolyMax for ma-chine improvisation, simulating with success 10 concur-rent omax-like improvisers.
8. CONCLUSIONS - FUTURE RESEARCH
In this report we tried to set the basis for a novel, three-party interaction scheme and proposed a corresponding ar-chitecture for Computer Assisted Improvisation. Employ-ing the approach of stylistic learning and stylistic interac-tion, we operated to formalize this interaction scheme un-der formalisms inspired from graph theory. We then dis-cussed a simple music sequence scheduling problem.
Graph approach to CAI appears to be promising formodeling three-party interaction in a real-time non super-vised improvisation environment that includes a ‘silicon’participant. Not only does it permit a formalization of CAIproblems in relation with space and time complexity, butit also approaches timing and capacity issues with widelyaccepted time-space units (for instance, milliseconds) thatcan make explicit the connection of our theoretical resultswith real-time system own formalism. This can be provedextremely practical for the future when integrating our the-oretical results to real-time environment, in contrast withother formalisms such as in [18] that despite of penetrat-ing complex interactivity issues, their temporal analysis inabstract time units makes this connection more implicit.Furthermore, graph formalization allows transversal bibli-ography research in all domains where graphs have beenemployed (production scheduling, routing and QoS etc.),and thus permit the generalization of music problems to
universal problems and their confrontation with algorithmsthat have been studied in this vast both theoretic and ap-plicative domain of graph theory.
In the recent future we are focusing on presenting for-mal solutions for the problems list in the previous section.Of particular interest are approximate solutions to prob-lems 5, 6, 7, which are NP-hard for the general case.
Concerning development, GrAIPE has still a lot wayto run until it fits with the requirements set in section 4.2.Even though already with a scheduler, a basic visualizationmodule and a scripting module, these modules are beingre-designed to adapt to the new research challenges. Othermodules are a constraint-based user interface and its com-munication with a solver which is under development.
9. REFERENCES
[1] De Mantaras, R., Arcos, J., ”AI and Music. From Composition to ExpressivePerformance” , AI Magazine, Vol. 23 No.3, 2002.
[2] Thom, B., “Articial Intelligence and Real-Time Interactive Improvisation”, Pro-ceedings from the AAAI-2000 Music and AI Workshop, AAAI Press, 2000.
[3] Assayag, G. , Bloch, G., “Navigating the Oracle: a Heuristic Approach”, Proc.ICMC’07, The In. Comp. Music Association, Copenhagen 2007.
[4] Fry, C., “FLAVORS BAND: A language for Specifying Musical Style”, Ma-chine Models of Music, p. 427-451, Cambridge, MIT Press, 1993.
[5] Franklin, J. A. Multi-Phase Learning for Jazz Improvisation and Interaction.Paper presented at the Eighth Biennial Symposium on Art and Technology, 13March, New London, Connecticut, 2001.
[6] Biles, A. GENJAM: A Genetic Algorithm for Generating Jazz Solos. In Pro-ceedings of the 1994 International Computer Music Conference, 131137. SanFrancisco, Calif.: International Computer Music Association, J. A. 1994.
[7] Miranda, E., “Brain-Computer music interface for composition and perfor-mance”, in International Journal on Disability and Human Development,5(2):119-125, 2006.
[8] Graves, S.,“A Review of Production Scheduling”, Operations Research, Vol.29, No. 4, Operations Management (Jul. - Aug., 1981), pp. 646-675, 1981.
[9] Papadopoulos, G., and Wiggins, G. 1998. “A Genetic Algorithm for the Gener-ation of Jazz Melodies”. Paper presented at the Finnish Conference on ArtificialIntelligence (SteP98), 79 September, Jyvaskyla, Finland, 1998.
[10] Giffler, B., Thompson, L., “Algorithms for Solving Production-SchedulingProblems”, Operations Research, Vol. 8, No. 4, pp. 487-503, 1960.
[11] M., Cont, A., Dubnov, S.,Assayag, G., “Anticipatory Model of Musical StyleImitation Using Collaborative and Competitive Reinforcement Learning”, Lec-ture Notes in Computer Science,2007.
[12] Pachet,F., “The continuator: Musical interaction with style”. In proceedings ofInternational Computer music Conference, Gotheborg (Sweden), ICMA,2002.
[13] Allauzen C., Crochemore M., Raffinot M., “Factor oracle: a new structure forpattern matching, Proceedings of SOFSEM’99, Theory and Practice of Infor-matics, J. Pavelka, G. Tel and M. Bartosek ed., Milovy, Lecture Notes in Com-puter Science 1725, pp 291-306, Berlin, 1999.
[14] Blackwell, T., Young, M. ”Self-Organised Music”. In Organised Sound 9(2):123136, 2004.
[15] Collins, N., McLean, A., Rohrhuber, J., Ward, A., “Live coding in laptop per-formance”, Organized Sound, 8:3:321-330, 2003.
[16] Dannenberg, R., “Real-TIme Scheduling And Computer Accompaniment Cur-rent Directions in Computer Music Research”, Cambridge, MA: MIT Press,1989.
[17] Puckette, M., “Combining Event and Signal Processing in the MAX GraphicalProgramming Environment”, Computer Music Journal, Vol. 15, No. 3, pp. 68-77, MIT Press, 1991.
[18] Rueda, C., Valencia, F., “A Temporal concurrent constraint calculus as an audiprocessing framework”, Sound and Music Computing Conference, 2005.
[19] http://www.audiosynth.com/
[20] http://chuck.cs.princeton.edu/





























