Embed Size (px)
Citation preview

1October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Undulator Alignment Concept &Conventional Alignment
Catherine LeCocq, SLAC October 21, 2005
Undulator Alignment Concept &Conventional Alignment
Catherine LeCocq, SLAC October 21, 2005
Undulator Alignment Concept Conventional Alignment Steps
Instrument and Tooling Network Design
Alignment after Installation
Undulator Alignment Concept Conventional Alignment Steps
Instrument and Tooling Network Design
Alignment after Installation

2October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Fiducialize all possible components(Yurii, Zack, Eric)
Assemble and pre-align all relevant components on a girder(Robert)
Build a tunnel network
Set all girders in the tunnel
Map all components to verify ab-initio alignment for BBA
Launch monitoring systems(Franz, Georg)
Perform BBA(Paul)
( ) … Presenter
Fiducialize all possible components(Yurii, Zack, Eric)
Assemble and pre-align all relevant components on a girder(Robert)
Build a tunnel network
Set all girders in the tunnel
Map all components to verify ab-initio alignment for BBA
Launch monitoring systems(Franz, Georg)
Perform BBA(Paul)
( ) … Presenter
Current Undulator Alignment Concept

3October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Gather all fiducial data and perform tunnel network design
Install tunnel monuments (floor and wall)
Survey tunnel network
Mark floor for anchors
Align “floor plates”
Re-survey tunnel network
Align “girder stands” (with CAM movers pre-set)
Survey girders (fully loaded and pre-aligned)
Gather all fiducial data and perform tunnel network design
Install tunnel monuments (floor and wall)
Survey tunnel network
Mark floor for anchors
Align “floor plates”
Re-survey tunnel network
Align “girder stands” (with CAM movers pre-set)
Survey girders (fully loaded and pre-aligned)
Conventional Alignment Steps

4October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Instruments and Tooling (1)

5October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Laser TrackersFARO SI
Precise LevelsTrimble (Zeiss) DiNi12
Leica DNA03
Total StationsLeica TC2002
Others FARO Platinum Arms (4ft and 8ft)
Optical Tooling (K&E and Brunson Jig Transits, K&E levels)
Portable Water Level (in development)
SLAC Calibration Laboratories:Sector 10: Horizontal and Vertical Comparators
Heavy Fab: K&E Optical Comparator
Laser TrackersFARO SI
Precise LevelsTrimble (Zeiss) DiNi12
Leica DNA03
Total StationsLeica TC2002
Others FARO Platinum Arms (4ft and 8ft)
Optical Tooling (K&E and Brunson Jig Transits, K&E levels)
Portable Water Level (in development)
SLAC Calibration Laboratories:Sector 10: Horizontal and Vertical Comparators
Heavy Fab: K&E Optical Comparator
Instruments and Tooling (2)

6October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Parametric Model:
Stochastic Model:
Least Squares Solution:
Free Net Solution:
Recent Example of Network Design:
Parametric Model:
Stochastic Model:
Least Squares Solution:
Free Net Solution:
Recent Example of Network Design:
Network Design
http://www-group.slac.stanford.edu/met/Align/TechAnalysis/2004/GLAST-Network.pdfhttp://www-group.slac.stanford.edu/met/Align/TechAnalysis/2004/GLAST-Network.pdf
)(xfl
lC12
0 lCP
wv
lxfw )( 00ˆ xx llv ˆ
lxx
f
,0
wt 1 tN 1ˆ
QQxt
lv QQ 1
0tG
00
w
kG
GN t
t

7October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Warning: This simulated network is based on very crude undulator dimensions. It is made to present typical laser tracker-precise leveling network capabilities.
Further studies should involve in particular real undulator hall drawing and in-situ instrument analysis.
Simulation facts:Tunnel dimensions: 130 m long, 5 m wide and 2 m high
Quad spacing based on current LCLS deck, positioned arbitrarily in the tunnel (1/3 of the width)
Floor is 1.0 m below beamline, wall monuments are 0.75 m above beamline, laser tracker set-ups are 0.4 m and 0.6 m above beamline.
Observation a-priori standard deviations:
Distances 30 µm
Horizontal angles 30 µm / D
Vertical angles 50 µm / D
Height differences 50 µm
Free network approach
Warning: This simulated network is based on very crude undulator dimensions. It is made to present typical laser tracker-precise leveling network capabilities.
Further studies should involve in particular real undulator hall drawing and in-situ instrument analysis.
Simulation facts:Tunnel dimensions: 130 m long, 5 m wide and 2 m high
Quad spacing based on current LCLS deck, positioned arbitrarily in the tunnel (1/3 of the width)
Floor is 1.0 m below beamline, wall monuments are 0.75 m above beamline, laser tracker set-ups are 0.4 m and 0.6 m above beamline.
Observation a-priori standard deviations:
Distances 30 µm
Horizontal angles 30 µm / D
Vertical angles 50 µm / D
Height differences 50 µm
Free network approach
Undulator Hall Network

8October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
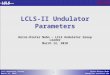
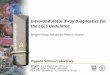
Undulator Hall Network Simulation
W23 sz = 22 μm sx = 47 μm sy =46 μm

9October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
number of laser tracker set-ups: 17
number of points: 49 (16 floor, 33 wall)
number of triplets:173
number of height differences: 81
number of coordinate unknowns: 198
number of nuisance parameters: 51
number of datum parameters: 4
number of laser tracker set-ups: 17
number of points: 49 (16 floor, 33 wall)
number of triplets:173
number of height differences: 81
number of coordinate unknowns: 198
number of nuisance parameters: 51
number of datum parameters: 4
Network Simulation Facts

10October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Example of Single Total Station Set-up
Single TC2002 Set-up sD = 100 μm sh = 50 μm/D sv = 50 μm/D
“Plate15” sz = 83 μm sx = 108 μm sy = 72 μm

11October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Definition given in LCLS TN-03-08 Definition given in LCLS TN-03-08
Undulator Coordinate System
x,y,z SLAC linac
SLAC-SLC system
x’,y’,z’ LCLS Undulator

12October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
Gather records for last mapping survey and wait for BBA to put all quads in line.
Align the “loose end” of each girder with respect to the next quadrupole.
Solve the last girder loose end.
Gather records for last mapping survey and wait for BBA to put all quads in line.
Align the “loose end” of each girder with respect to the next quadrupole.
Solve the last girder loose end.
Alignment after Installation

13October 20-21, 2005Internal LCLS Undulator Alignment and Motion Review
Catherine LeCocq, [email protected]@slac.stanford.edu
End of Presentation
In conclusion, the current undulator alignment concept is solidifying.
The conventional alignment part is well integrated and relies on previous experience.