Embed Size (px)
Citation preview

Numerical and Analytical Modeling of Aligned Short Fiber Compositesincluding Imperfect Interfaces
J.A. Nairn∗ and M. Shir Mohammadi
Wood Science and Engineering, Oregon State University, Corvallis, OR 97330, USA
Abstract
Finite element calculations were used to bound the modulus of aligned, short-fiber composites with
randomly arranged fibers, including high fiber to matrix modulus ratios and high fiber aspect ratios. The
bounds were narrow for low modulus ratio, but far apart for high ratio. These numerical experiments
were used to evaluate prior numerical and analytical methods for modeling short-fiber composites.
Prior numerical methods based on periodic boundary conditions were revealed as acceptable for low
modulus ratio, but degenerate to lower bound modulus at high ratio. Numerical experiments were also
compared to an Eshelby analysis and to an new, enhanced shear lag model. Both models could predict
modulus for low modulus ratio, but also degenerated to lower bound modulus at high ratio. The new
shear lag model accounts for stress transfer on fiber ends and includes imperfect interface effects; it
was confirmed as accurate by comparison to finite element calculations.
Key words: Short-fiber composites, Elastic properties, Finite element analysis, Interface
1. Introduction
In mean-field modeling of short-fiber composite materials, a composite unit cell is subjected to
mean stress or strain and the effective stiffness or compliance tensors are found by averaging strains
and stresses throughout the composite [1]. This averaging is done over all unit cell orientations using
a fiber orientation distribution function. The unit cell for this analysis is a short fiber composite with
all fibers aligned in the same direction. Thus, the fundamental problem for analysis of short-fiber
composites is to determine mechanical properties of an aligned, short-fiber composite.
One might think this problem is solved by methods such as Eshelby [2], Mori-Tanaka [3], modern
∗Corresponding author, [email protected]
Preprint submitted to Elsevier May 22, 2015

shear-lag models [4–7], or numerical methods [8–15], but some gaps appear. First, most prior numer-
ical studies have been limited to modest fiber/matrix modulus ratios of R = E f /Em < 30 and relatively
short fiber aspect ratios, ρ = l f /d f < 30 [8, 9, 11, 13–15]. Gusev and Lusti [10, 12] looked at higher
aspect ratios, but only for a narrow selection of R and fiber volume fraction, Vf . As a consequence, the
validation of analytical models by these numerical studies [9] only validates them for the corresponding
small range of properties.
A recent trend in composites research, especially in nanocomposites, is to reinforce soft polymers
(e.g., elastomers with R > 104) and isolate nano-fibers with aspect ratios higher then 30 [16–19];
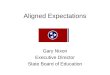
the results of such work has been a challenge to model. Figure 1 show some experimental results
for reinforcement of an elastomer with nano-cellulose fibers [16] and compares them to an existing
analytical model (labeled “Mori-Tanaka” [3]) and an existing numerical method based on large periodic
representative volume elements (RVEs) with randomly placed fibers (labeled “Periodic RVE (FEA)”
using approach of Gusev [8]). These experimental results are two to three orders of magnitude higher
then existing models. The question arises — are these high reinforcements the discovery of a new nano-
phenomenon that cannot be modeled with continuum mechanics or do continuum methods just need to
be revised for high R? To explore this question, we developed a new numerical method to derive upper
and lower bounds to the modulus. The sample calculation of bounds in Fig. 1 (see dashed lines) shows
that experimental results fall within continuum mechanics bounds and that prior modeling methods all
degenerate to lower bound results. In other words, the methods described here have new potential to
guide expectations of properties for composites with high R.
To study composite modeling methods at high R and aspect ratio as well has how they relate to
conventional methods at low R and aspect ratio, we ran numerical calculations for a very wide range
of R (from 10 to 105) and aspect ratios (from 5 to 100). The calculations in this part of the study
were based on novel methods that allowed us to numerically determine upper and lower bounds to the
fiber-direction modulus. The shear number of calculations along with the size of mesh (particularly at
high aspect ratio) precluded mesh refinement of numerical results. A powerful feature of the bounding
method, however, is that it allows one to get definitive bounds even without mesh convergence. These
numerical results provided input for considering four questions:
What is correct modulus? One of the best ways to judge the accuracy of modeling methods is to compare
them to numerical results [9], but what numerical method gives the correct modulus? Here we derived
numerical bounds using Monte Carlo methods with randomly placed and well-dispersed, aligned fibers.
2

Vf
E c (M
Pa)
0.00 0.02 0.04 0.06 0.08 0.10 10-1
100
101
102
103
Mori-Tanaka
Periodic RVE (FEA)
Experiments
FEA Lower Bound
FEA Upper Bound
Figure 1: The symbols are experimental results from Ref. [16] with R = 9.5× 105, which are compared to existing modelingmethods (Mori-Tanaka and Periodic RVE (FEA)) and to upper and lower bounds described in this paper (dashed lines). Theexperiments are quasi-2D with fibers claimed to be randomly aligned in the plane of a film. The models are 2D calculationsfor aligned fibers. The comparison with experiments is only qualitative, but if experiments had aligned fibers, they would movetoward the upper bound and still demonstrate that prior models are near the lower bound and far below experiments.
We used bounding methods to define limits on the modulus for R up to 105 and ρ up to 100. The
separation of the bounds shows that the calculated modulus depends on boundary conditions, especially
for large R.
How do periodic RVE calculations compare to numerical bounds? Most numerical models use periodic
RVEs and assume analysis results with periodic boundary conditions are equivalent to bulk composite
properties. To test this hypothesis, we compared the new numerical bounds to both small periodic RVEs
(using either cylindrical (rectangles in 2D) or elliptical fibers) and large RVEs with random fibers. All
periodic RVE methods work well for low R, but degenerate to lower bound results at high R.
Can an analytical model sufficiently capture the results of periodic RVE composites? Given the capabilities
(and limitations) of periodic RVE analysis, an analytical model that agrees with those numerical results
would have those same capabilities (and limitations). We developed an improved shear-lag model for
short composite fibers that explicitly includes stress transfer on the fiber ends and imperfect interfaces.
The new model, along with an Eshelby [2] analysis, were compared to numerical results on the same
geometries. These analytical methods can reproduce numerical methods based on periodic conditions,
which means they give good prediction for low R, but degenerate to lower bound results for high R.
Can an analytical model account for 3D fibers and for imperfect interfaces? The first three questions
used 2D calculations and assumed perfect fiber/matrix interfaces. Real composites are 3D and may
have imperfect interfaces. We lastly considered 3D single fiber RVE results by comparing axisymmetric
3

numerical calculations with imperfect interfaces to the new shear lag analysis with concentric cylinders
that also includes imperfect interface effects. The new model accurately reproduces all numerical results
including the role of imperfect interfaces.
2. Methods
All finite element calculations (FEA) were linear elastic, static, and two dimensional. Most simula-
tions were plain strain analyses although some 3D results were generated using axisymmetric simula-
tions. All calculations were done using the open source code NairnFEA [20] with 8-node quadrilateral
elements. Issues involving convergence are discussed in section 3. By using script control, we au-
tomated the thousands of FEA calculations needed to get sufficient results for answering the posed
questions. The FEA calculations were run on either desktop computers or Linux nodes in a cluster. The
main requirement for the largest calculations was to have sufficient memory (more than 5 GB).
3. Results and Discussion
3.1. What is the Correct Modulus?
To run numerical experiments for the “correct” modulus of aligned short fiber composites, we ran
FEA calculations on representative composites with randomly placed fibers. The fibers were all aligned
in one direction, placed using a random sequential adsorption (RSA) method [11], and well dispersed
(separated by at least one element in the mesh). The numerical experiments were done for fiber to
matrix modulus ratios of R = 10, 100, 1000, 104, and 105, for fiber aspect ratios of ρ = 5, 10, 20, 40,
70, and 100, and for fiber volume fractions of Vf = 0.01, 0.02, 0.05, 0.1, 0.15, 0.2, and 0.25. Monte
Carlo methods were used to account for the random structures. For each combination of R, ρ, and
Vf , we ran FEA calculations for 20 random structures and averaged the results for mean and standard
deviation of the modulus. For most property settings, the 20 replicates gave sufficiently narrow errors
bars on the results. The total number of FEA calculations required to map the parameter space exceeded
15,000.
The first issue was the mesh. To deal with randomly placed fibers with randomly situated stress
concentrations, the modeling used a regular mesh. A quick calculation showed that a 3D mesh for
the largest aspect ratio would have over a billion degrees of freedom, which is infeasible for the 15,000
calculations we needed to run. 3D calculations by Gusev [8] required 30 processor-hours per calculation
and that was for spherical inclusions (ρ = 1) which can use much smaller RVEs then needed here. We
4

therefore switched to 2D, plain-strain FEA (which still can be used to evaluate other methods provided
comparisons are made to 2D versions of those methods). Even in 2D, the mesh could not be highly
refined. We used the crudest mesh possible where the element size was equal to the fiber diameter.
Thus each fiber had one element across its width and the well-dispersed fibers were separated by
at least one fiber diameter (i.e., one mesh element). With this mesh, the largest calculation had about
200,000 degrees of freedom and could be completed in a 5-30 minutes (depending on computer speed).
Because we were limited to a crude mesh, we could not refine the mesh for convergence. To
allow definitive results with such a mesh, we adopted a bounding method. In composite variational
mechanics, upper and lower bound results are found by the solving the two problems in Fig. 2 [1, 21–
23]. First, the composite is subjected to constant tractions, T , over the entire surface of
T = σ0 · n̂ (1)
where σ is the uniform applied stress and n̂ is surface normal. For stress corresponding to axial loading
in the fiber direction (see Fig. 2A), the complementary energy, as approximated by FEA strain energy
(ΓF EA), must be greater than or equal to the exact complementary energy, Γ, leading to
ΓF EA ≥ Γ =σ2
0V
2E(r)y y
or E(r)y y ≥σ2
0V
2ΓF EA= ELB (2)
where V is specimen volume and E(r)y y is the effective, plain strain modulus in the y direction. In other
words, an FEA calculation of ΓF EA provides a lower bound to the axial modulus (ELB).
Second, the composite is subjected to a uniform strain field, which corresponds to fixed displacement
(in both directions), u, over the entire surface of
u = ε0 · x (3)
where ε0 is the applied strain and x is position on the surface. For such fixed-strain conditions (see
Fig. 2B), the FEA strain energy (UF EA) is a rigorous upper bound to the exact strain energy, U , leading
to
UF EA ≥ U =1
2ε0 ·Cε0V (4)
where C is the effective stiffness tensor. Numerical calculation of axial modulus when using fixed-strain
boundary conditions requires three separate FEA calculations:
1. Use εx = ε0, εy = 0, and γx y = 0. An FEA calculation gives C11 ≤ 2U11/(ε20V ) (where U11 is the
strain energy from that FEA analysis).
5

σ0 Fixed ~u
Fixed ~ux
y
A B
σ0
Figure 2: Schematic view of finite element model used for stress and fixed-strain boundary conditions. A. Stress boundaryconditions apply uniform stress in the y direction on the top and bottom edges and no stress on the side edge. A minimal numberof displacement conditions are used to prevent rigid body rotation. B. Fixed-strain boundary conditions apply fixed displacementsin both the x and y directions on all edges to match the imposed strains.
2. Use εx = 0, εy = ε0, and γx y = 0. An FEA calculation gives C22 ≤ 2U22/(ε20V ).
3. Use εx = ε0, εy = ε0, and γx y = 0. An FEA calculation gives C11 + C22 + 2C12 ≤ 2U12/(ε20V ).
A reduced plain-strain axial modulus can be found from these three results using
E(r)y y ≤2
ε20V
�
U22 −(U12 − U11 − U22)2
4U11
�
= EUB (5)
The plain strain properties are defined from the reduced compliance tensor, S(r), which is the inverse
of the stiffness tensor found by 2D FEA:
C11 C12 0
C12 C22 0
0 0 C66
−1
= S(r) =
1/E(r)x x −ν (r)x y /E(r)x x 0
−νx y/E(r)x x 1/E(r)y y 0
0 0 1/G(r)x y
(6)
A side benefit of the three upper bound calculations is that they can also determine E(r)x x and ν (r)x y . One
more calculation with εx = εy = 0, and γx y = γ0 can add the fourth (and final) in-plane property, G(r)x y .
The results here focus on E(r)y y although some comments on other properties are at the end.
6

Formally, neither the lower bound in Eq. (2) nor the upper bound in Eq. (5) are rigorous bounds.
A rigorous lower bound requires complementary energy. Here we assumed strain energy found under
stress boundary conditions is a good approximation to complementary energy. Although fixed-strain
conditions give rigorous upper bounds to the elements of C, Eq. (5) combines those bounds to find a
modulus that may not be a rigorous upper bound to axial modulus. Because the second term in Eq. (5)
is generally small (<2% of U22, especially at higher R and Vf ), E(r)y y is effectively a rigorous upper bound
property. We therefore took these two results as defining bounds for the composite modulus.
The next issue was the size required for the BVE. It should be large enough that results are unaffected
by its size, but small enough to keep calculation times reasonable. Figure 3A plots ELB for fixed traction
(solid curves) and upper bound C11 for fixed strain (dashed curves) as a function of the length of the
BVE relative to the fiber length (L/L f ) for fixed width of 20 times the fiber diameter (d f ). These results
are for fiber volume fraction Vf = 10%, modulus ratio R = 105 (more details on fiber properties are
given below), and two fiber aspect ratios (ρ = 10 and 100); they include the extreme cases with the
largest value of R = 105 and largest ρ = 100. Figure 3B shows analogous results as function of width
of the BVE relative to fiber diameter (W/d f ) for fixed length of 10L f and a different R = 102. For RVE
with short L, it is likely for fibers to span the entire length of the RVE resulting in an artificially high
modulus that approaches the continuous fiber composite. As L increased, the modulus decreased and
plateaued above L/L f in the range of 5 to 10. Similarly, the magnitude of the error bars decreased up
to about L/L f = 10. All subsequent simulations used L/L f = 10. For short width BVE, the modulus
bounds were widely separated, but moved closer as W increased. They plateaued at about W/d f = 40.
Width effects at higher R= 105 showed a small amount of continued decrease in the upper bound result
for W/d f > 40. The decrease, however, was relatively small. Because using larger W made simulations
impractical, all subsequent simulations used W/d f = 40. Note that this BVE size is larger than some
published RVE results. For example, Gusev and Lusti [10, 12] used L/L f ∼ 3 and W/d f ∼ 12. We
expect that the nature of fixed strain boundary conditions, as opposed to periodic boundary conditions
used in other FEA methods, is the cause of the need for BVEs to be larger than other RVEs.
Remark 1: Traditional RVE methods (e.g., [10–15]) use periodic boundary conditions where dis-
placements normal to an edge are constant (such that plane sections remain plane) while tangential
displacements are a degree of freedom [9]. These prior boundary conditions are neither fixed strain nor
fixed traction. While they may converge to a result, they provide no information on where they fall rel-
ative to upper and lower bounds (i.e., how those boundary conditions affect the converged result). The
7

L/Lf
E yy (L
B) a
nd C
11 (U
B) (M
Pa)
0 2 4 6 8 10 12 14 16 18 20 100
101
102
103
104
R = 105, Vf = 0.1
ρ = 100
ρ = 10
ρ = 100
ρ = 10
A
W/df
E yy (L
B) a
nd C
11 (U
B) (M
Pa)
0 10 20 30 40 50 60 0
2000
4000
6000
8000
10000
12000
ρ = 100
ρ = 10
R = 102, Vf = 0.1B
Figure 3: A. The lower bound axial composite modulus Ey y (LB) and upper bound C11 as a function of RVE length (L/L f ) forfixed width of 20d f and for two fiber aspect ratios. B. The lower bound axial composite modulus Ey y (LB) and upper bound C11as a function of RVE width (W/d f ) for fixed length of 10L f and for two fiber aspect ratios. Both plots used fiber volume fractionVf = 0.1.
boundary conditions used here to get bounds are different. The sample calculations in Fig. 1 suggest
that traditional methods degenerate to lower bound results, while the bounding method has the poten-
tial to bracket experimental results. To distinguish the fixed strain or traction boundary conditions used
here from traditional RVE methods, the new method will be called a BVE method for bounded volume
element.
Remark 2: Although a BVE model can formally describe a periodic structure, it seems unrealistic to
assume fixed strain on the edge of a full-scale composite would translate to fixed strains on represen-
tative subelements of the composite. Instead, the BVE method is best imagined as external boundary
conditions on a full-scale composite (albeit, a small one). When imagining a full-scale composite, it
could be inconsistent to require the BVE to be geometrically periodic (as commonly done for RVEs of
traditional methods [10]). Nevertheless, we compared geometrically non-periodic BVE calculations to
some periodic ones and the differences were negligible for the size BVEs used.
Using the above method and BVE size, we ran all combinations of R, ρ, and Vf ; some selected
results are discussed here (other results are in subsequent sections). All simulations used an isotropic,
elastic, high-modulus fiber with reduced plain strain modulus E(r)f = 100,000 MPa and Poisson’s ratio
ν(r)f = 0.33 (the unreduced properties were E f = 93,843 MPa and ν f = 0.2481). The plane strain
matrix modulus varied as Em = E f /R and its Poisson’s ratio was the same as the fiber’s. Figure 4A shows
axial modulus for R= 100 for three selected aspect ratios. The dashed curves are the lower bound and
8

Vf
Axia
l Mod
ulus
(MPa
)
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0
2000
4000
6000
8000
10000
12000
14000
16000
18000
ρ = 100
ρ = 40
ρ = 10
A
R = 100
Vf
Axia
l Mod
ulus
(MPa
)
0.00 0.05 0.10 0.15 0.20 0.25 0.30 100
101
102
103
104
R= 105
ρ = 100
ρ = 40
ρ = 10
Figure 4: Axial composite modulus for R= 100 (A) and R= 105 (B) for three aspect ratios as a function of fiber volume fraction.The symbols are Monte Carlo BVE results with error bars indicating their standard deviations. The dashed and solid curvesconnecting the symbols indicate lower and upper bounds, respectively. Note that (A) uses a linear scale while (B) uses a log scaleto better visualize all results.
the solid curves are the upper bound. As expected, the modulus increased as volume fraction increased,
but the increase is non-linear. The initial slope is low indicating low volume fraction does a relatively
poor job of providing modulus. The slope gradually increased indicating increased fiber effectiveness
at higher volume fraction. The error bars are rather small — in most cases smaller than the size of
symbols used in the plots. Figure 4B shows the same results for R = 105 (on a log scale). Unlike the
R = 100 results, these results have lower bound modulus that is three orders of magnitude below the
upper bound. Furthermore, the upper bound results have higher error bars; the coefficient of variation
was over 100% at low Vf , but decreased to a range of 40% to 20% for Vf from 0.15 to 0.25.
Differences between upper and lower bounds in analytical modeling are well known to increase as R
gets larger [1]. But those differences are attributed to approximations in the modeling while numerical
results are commonly assumed to hone in on the correct answer and therefore upper and lower bounds
should be the same. The question remains — are the differences between upper and lower bounds
because the FEA is not converged or something else? To answer this question, we refined the mesh. We
could most refine the mesh for the shortest fiber with ρ = 5. Figure 5 gives modulus as a function of
mesh element size for R= 100 and for R= 105 when ρ = 5 and Vf = 0.25. As the mesh was refined, the
upper bound dropped, while the lower bound was nearly constant. We estimated converged results by
extrapolating to zero element size and a discrepancy that was outside errors bars (as calculated by least
squares fits with error estimations) remained between upper and lower bound results. In other words,
part (probably most) of the difference between stress and strain boundary conditions is that even exact
9

Element Size/Fiber Diameter
Axia
l Mod
ulus
-0.1 -0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 2000
2500
3000
3500
4000
R = 100
A
Element Size/Fiber Diameter
Axia
l Mod
ulus
-0.1 -0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 -200
0
200
400
600
800
1000
1200
1400
R = 105
B
Figure 5: Axial composite modulus for ρ = 5 and Vf = 0.25 and R = 100 (A) or R = 105 (B) as a function of element size. Thelines extrapolate to zero element size or a mesh with an infinite number of elements. The symbols are Monte Carlo BVE resultswith error bars indicating their standard deviations.
solutions for upper and lower bounds differ. This observation is an effect of the heterogenous BVE. For
homogeneous materials, the two boundary conditions used here would give exactly the same results;
for heterogeneous materials, however, the effective modulus depends on the boundary conditions. As
a consequence, one cannot define the “correct” composite modulus without specifying the boundary
conditions as well. The challenge is to determine which results most accurately describe the full-scale
composite. This boundary condition effect is a function of R. For R< 100, which comprises the range of
most conventional composites, the boundary condition effect is relatively small (<20%). But for high
R, the effect becomes very large (1 to 3 orders of magnitude).
Lastly, we emphasize the BVE bounds are just that — bounds to axial modulus — and should not
be construed as a “solution” for modeling composites with high R. Indeed, Fig. 5 shows that the upper
bound decreases (by a factor of 2) for a refined mesh when ρ = 5 (we do not know how much it
would decrease for large ρ). Similarly, Fig. 3 shows the upper bound might decrease further if the BVE
was made much wider. Nevertheless, the bounds presented here remain as valid bounds to composite
properties, even if they are not the best bounds that could ever be obtained. If experimental results
are discovered that exceed these upper bounds, those results potentially indicate a new reinforcement
mechanism that needs further study. On the other hand, any experiments bracketed by these bounds
may be conventional reinforcement that can be explained by continuum mechanics.
10

A B
1
2 1 2
C
Figure 6: A. A periodic structure with parallel fibers. B. A periodic structure with staggered fibers. C. A geometrically periodicstructure with many randomly placed fibers. The dashed lines in A and B outline two possible unit cells for analysis. Each ofthese has two planes of symmetry allowing the numerical calculations to be done on one quadrant of the cell.
3.2. How do periodic RVE calculations compare to numerical bounds?
Most numerical models analyze composite unit cells containing from one or two fibers [9] to many
fibers [8]. Figures 6A and B show the two simplest, 2D, periodic structures with parallel or staggered
fibers and with dashed lines indicating the smallest repeating unit cells. The parallel structure can be
modeled with a single fiber unit cell while the staggered structure requires a unit cell with two complete
fibers (each of these can model one quadrant of the unit cell by symmetry). Figure 6C shows a geo-
metrically periodic structure with many fibers subjected to periodic displacement boundary conditions.
Models that use any of the unit cells in Figure 6 assume the results reflect the full composite. This
section compares results from these periodic structures to the numerical bounds from BVE experiments.
Figure 7 shows the meshes used to model the parallel structure with either rectangular or elliptical
fibers (elliptical fiber models were done for comparison to elliptical-fiber-based Eshelby [2] method in
the next section). An unknown parameter for an encapsulated fiber is how much matrix is above the
fiber and how much is on the sides? We choose this parameter by setting the distance from the fiber
end to the top of the mesh, ∆, to equal the distance from the side of the fiber to the edge of the mesh.
Under this assumption, the rectangular fiber volume fraction is:
Vf =r f L f t
rm Lm t=
ρr2f
(r f +∆)(ρr f +∆)(7)
where t is the 2D thickness. This quadratic equation is easily solved to find ∆ for input modeling
parameters ρ, r f , and Vf . For comparing rectangular to elliptical fibers, we kept aspect ratio (ρ =
11

0 0rf rm rmb
�
�
�
�
0 0
Lf
2
Lm
2
Lm
2
a
I
II
I
II
0
⇢V1
Vf
⇢V1
Vf
⇣
A B
Figure 7: The finite element meshes along with definition of geometric parameters for single-fiber, unit cell models for the parallelstructure with either rectangular or elliptical fibers. For clarity, the boundary conditions were omitted and the mesh is showncoarser than the actual mesh used for converged calculations.
L f /(2r f ) = a/b) and fiber area (which is also Vf in 2D) constant resulting in
2L f r f = 4ρr2f = πρb2 = πab or b =
2r fpπ
and a =2ρr fpπ
(8)
where a and b are the major and minor axes of the ellipse. The distance from the top and side of the
ellipse to the edge is now found by solving the quadratic equation for ∆ defined from
Vf =πabt
2rm Lm t=
πρb2
4(b+∆)(ρb+∆)(9)
The meshes for the two fiber unit cells (i.e., staggered structure) were similar, but considered only rect-
angular fibers. The meshes for the many-fiber periodic structure were regular grids with one element
across the fiber width (i.e., same as in BVE calculations) and rectangular fibers only. We did periodic
FEA calculations for selected combinations of R, ρ, and Vf used in the BVE modeling. Unlike the BVE
modeling, we were able to refine the one- and two-fiber unit cell meshes and reach convergence by sub-
dividing the elements in Fig. 7 until results became constant (the converged meshes had six elements
across the fiber diameter).
First, we analyzed each periodic structure using periodic boundary conditions (e.g., the displace-
ment boundary condition in Fig. 6C) and found modulus from three calculations (analogous to BVE
12

Vf
E (M
Pa)
0.00 0.05 0.10 0.15 0.20 0.25 100
101
102
103
104
105
R = 10
R = 100
R = 104
A
ρ = 20
Vf
E (M
Pa)
0.00 0.05 0.10 0.15 0.20 0.25 100
101
102
103
104
105
R = 104
R = 10
R = 100
R = 1000
R = 105
ρ = 20, Lower BoundB
Figure 8: Axial composite modulus for ρ = 20 as a function of fiber volume fraction for R from 10 to 105. A. Compares results ofperiodic unit cells to BVE bounds. B. Compares fixed traction analysis of the parallel structure to lower bound BVE results. Thedashed and solid curves are elliptical and rectangular fibers, respectively. The dashed-dotted lines in A are for numerical analysisof a staggered structure. The filled triangular symbols (with error bars) in A are for Monte Carlo analysis of many-fiber unit cellswith periodic boundary conditions. The open symbols (with error bars) are upper bound (squares) and lower bound (circles)BVE results.
method using Eq. (5)). Figure 8A compares these periodic FEA results to BVE bounds. The solid and
dashed lines are for parallel structures with rectangular and elliptical fibers, respectively (the dashed
elliptical results are mostly obscured by rectangular fiber results). The dash-dot lines are for the stag-
gered structure. The dotted lines with filled triangular symbols are Monte-Carlo FEA of many-fiber unit
cells. The open symbols are the BVE bounds. For R= 10 or 100, the BVE bounds are fairly close and all
periodic FEA results were within those bounds. In other words, all methods gave good results. For R
greater than 1000, however, the BVE bounds diverge, such as R = 104 in Fig. 8A, and all periodic FEA
methods track the lower bounds results. The staggered structure (dash-dot lines) was slightly stiffer (as
expected) than the parallel structure, but the many-fiber, periodic FEA reverses that trend by reverting
to be closer to the lower bound result.
We considered two causes for periodic FEA being lower bound results and far from upper bound
results for high R. First, the parallel and staggered unit cells were converged results while the BVE re-
sults bounds were non-converged results. But, this difference cannot explain the observations, because
upper bound BVE results do no converge to lower bound results with a more refined mesh. For example
the results in Fig. 5B show that BVE results for R = 105 and ρ = 5 for Vf = 0.25 extrapolated to zero
element size give upper and lower bound moduli of 492± 202 MPa and 2.15± 0.05 MPa, respectively.
In contrast, the results for parallel structure with periodic boundary conditions gave E(r)y y = 2.9 MPa,
13

which is two orders of magnitude below the upper bound and very close to the lower bound.
Second, we considered the boundary conditions. An alternate approach to periodic boundary con-
ditions is to apply the fixed-strain boundary conditions used for the BVE. This effect clearly can explain
the differences. When fixed-strain boundary conditions are applied to the many-fiber unit cell, it is
converted essentially into the BVE method and matches the upper bound results. The only difference
is the geometrically periodic structure, which as mentioned above has negligible affect on BVE results.
The fixed-strain method, however, does not work well for parallel and staggered structures because the
final result depends on the choice of unit cell (e.g., quadrants of unit cells 1 or 2 in Fig. 6A and B).
This dependence is caused by variable amount of fiber material contacting the fixed-strain boundary
conditions. In other words, the BVE method only works for large unit cells (see Fig. 3). A potential
concern on all upper bound results is that they are influenced too much by fibers contacting the bound-
ary conditions. It would be a simple matter to artificially force all fibers sufficiently far from the mesh
edges. This approach, however, would effectively create a parallel structure that would degenerate to
the lower bound results and therefore be far below experimental results. The better solution is to verify
the volume element in BVE calculations is sufficiently large and this size requirement may be much
higher then the size needed when using periodic RVEs with periodic boundary conditions.
Lastly, we comment on rectangular vs. elliptical fibers for the parallel structure. The modulus with
a rectangular fiber was always very close to the modulus with an elliptical fiber (as seen by solid and
dashed lines in Fig. 8). Looking closer, the elliptical fiber was always slightly stiffer than a rectangular
fiber, with the exception of R ≤ 10 and ρ < 50. Steif and Hoyson [24] previously looked at cylindrical
vs. ellipsoidal fibers and saw larger differences, but they did different calculations. All their results were
for the limit of low Vf and they used different cylinder-ellipse analogies. Their calculations matched
either minor or major axis of the ellipse to the corresponding axis of the cylinder and then either kept
ρ or Vf constant. We claim our analogy with both ρ and Vf constant is more appropriate, although it
non-intuitively leads to both the major and minor axes of the ellipse being larger than the fiber length
and diameter, respectively. Although rectangular and elliptical fibers gave nearly the same modulus,
they gave different fiber stress states. As known from Eshelby, the stress in an elliptical fiber is constant
[2]. In contrast, a rectangular fiber shows classic stress transfer with low stress on the ends building
to higher stress in the middle. These differences apparently do not affect modulus calculations, but
they would be expected to affect models of composite properties that depend on fiber stress, such as
modeling of stress transfer or interfacial failure.
14

3.3. Can an analytical model sufficiently capture the results of small periodic RVE composites?
Most analytical models consider a parallel structure with the single fiber geometry in Fig. 7 subjected
to constant axial stress in the y direction. Figure 8B shows numerical calculations for the single-fiber
unit cell and compares to BVE lower bounds. The numerical calculations used constant traction in the
y direction rather then periodic displacement (i.e., the same boundary conditions used in analytical
modeling). The numerical results were found to match lower bound results for all values of Vf , ρ,
and R that were studied. Furthermore the modulus for rectangular and elliptical fibers were nearly
identical (the solid and dashed lines in Fig. 8B overlap). The next task was to see if analytical modeling
reproduces numerical RVE results and thereby inherits agreements with lower bound BVE results, but
also disagreements with upper bound BVE results for high R.
We first considered an Eshelby analysis [2], but all prior Eshelby models are for 3D composites
with ellipsoidal fibers [1, 25] where we need a 2D analysis to compare to 2D FEA. Fortunately, the 2D,
plane-strain results can be derived as outlined in the Appendix. Although an Eshelby analysis is for low
Vf , that limit can be removed by a Mori-Tanaka [3] extension. Tucker and Liang [9] point out that a
Mori-Tanaka [3] extension can be derived from an Eshelby analysis [2] by replacing the Eshelby tensor,
S, with an effective tensor, S∗, defined by:
S∗ = (1− Vf )S (10)
In addition to an Eshelby/Mori-Tanaka model (E/MT), we also compared to shear-lag methods. The
common shear-lag solution in the literature [4, 5] and in textbooks [26, 27] considers two concentric
cylinders (or two parallel layers when in 2D) with zero stress on the fiber ends. We tried this model
(using optimal shear-lag parameters [4–7]) and it was inaccurate. For a better analysis, we derived a
new shear lag model for a single fiber encapsulated in matrix (i.e., the geometry in Fig. 7A). In addition,
the new analysis accounts for stress transfer on the fiber ends and imperfect interfaces between the
fiber and the matrix [7, 28]. This model, denoted as a shear-lag capped model (SLC), is derived next
followed by comparison of E/MT and SLC to numerical calculations on the same structure and boundary
conditions.
The SLC model is based on recently optimized shear lag methods that alter (and improve) the shear
lag parameter [4–6] and explicitly account for imperfect interfaces [7]. The model is split into two
regions (see Fig. 7A) and the y axis is converted to a dimensionless coordinate using ζ = y/r f ; the
fiber top is at ζ= ρ and the matrix top is at ζ= ρV1/Vf where V1 is fiber volume fraction within region
15

II:
V1 =r f L f t
rm L f t=
r f
r f +∆
where ∆ is found by Eq. (7). Region I is divided into two perfectly-bonded matrix layers aligned with
the fiber — a “core” layer from x = 0 to r f and an “outer” layer from x = r f to rm (note that V1 is also
core layer volume fraction in region I). The general shear lag solution [5–7] for average axial stress in
the core region is:
σc(ζ)�
= σ0 + C1eβ1ζ + C2e−β1ζ
where σ0 is the total applied stress and β1 is the shear lag parameter [4, 5] in region I for layers with
identical properties and a perfect interface:
β21 =
3GmV1
EmV2
Here V2 = 1− V1 is the matrix volume fraction in region II (and outer layer volume fraction in region
I) and Em and Gm are matrix tensile and shear moduli. Assuming uniform stress σ0 along the edge at
ζ = ρV1/Vf , using force balance, and redefining C1, the average axial stresses in the region I layers
simplify to:
σc(ζ)�
= σ0 + C1 sinh
�
β1
�
ζ−ρV1
Vf
��
σo(ζ)�
= σ0 −C1V1
V2sinh
�
β1
�
ζ−ρV1
Vf
��
In region II, the average axial stresses in the fiber and matrix are [5–7]:
¬
σ f (ζ)¶
= σ∞ + C3 cosh(β2ζ) and
σm(ζ)�
=σ0 − V1
�
σ∞ + C3 cosh(β2ζ)�
V2
where σ∞ is the far-field fiber stress (i.e., stress at the middle of a long fiber) and β2 is the shear lag
parameter in region II [7]:
β22 =
E2V1
E f EmV2
V1
3G f+ V2
3Gm+ V1
r f Dt
where E2 = E f V1+ EmV2 is rule of mixtures axial modulus of region II, E f and G f are tensile and shear
moduli of the fiber, and Dt is an imperfect interface term. The imperfect interface is modeled by al-
lowing interfacial displacement discontinuities that are proportional to the traction in the displacement
direction [28]. For region II, the axial displacement jump at x = r f is [w] = τ(r f )/Dt , where τ(r f ) is
16

the interfacial shear stress. When Dt =∞, the displacement jump is zero and the interface is perfect;
when Dt = 0, τ(r f ) is zero and the interface is debonded; all other Dt values model an imperfect
interface.
The two unknown constants, C1 and C3, can be eliminated by continuity conditions between the
fiber end and the core layer in region I:
¬
σ f (ρ)¶
=
σc(ρ)�
and [w(ρ)] =
¬
σ f (ρ)¶
Dn(11)
The first is stress continuity. The second is a new imperfect interface relation on the fiber ends where
the jump in axial displacement between the fiber and the core layer is determined by Dn, which is an
imperfect interface parameter analogous to Dt but for normal displacements [28]. The displacement
jump needed for this condition is calculated from
[w(ρ)] = ∆
wm�
+∆
wo�
−∆
wc�
−∆¬
w f
¶
where ∆⟨wi⟩ is the displacement difference between the top and bottom of region i. Using 1D Hooke’s
laws:
∆
wm�
= r f
∫ ρ
0
�
σm(ζ)�
Em+αm∆T
�
dζ ∆¬
w f
¶
= r f
∫ ρ
0
¬
σ f (ζ)¶
E f+α f∆T
!
dζ
∆
wc�
= r f
∫
ρV1Vf
ρ
�
σc(ζ)�
Em+αm∆T
�
dζ ∆
wo�
= r f
∫
ρV1Vf
ρ
�
σo(ζ)�
Em+αm∆T
�
dζ
where αm and α f are the thermal expansion coefficients of the matrix and fiber and ∆T is the temper-
ature difference. Substituting the stresses, using
σ∞ =E f
E2σ0 +α2∆T and α2 =
α f E f V1 +αmEmV2
E2
where α2 is the weighted rule-of-mixtures thermal expansion coefficient of region II, and integrating
(in Mathematica, Wolfram Research) gives
[w(ρ)] =r f ρ
EmV2
�
2C1
sinh2(β∗1ρ)
β1ρ− C3
E2
E f
sinh(β2ρ)β2ρ
�
where
β∗1 =(V1 − Vf )β1
2Vf
17

Solving Eq. (11) for C1 and C3 gives:
C1 =
σ0
2
�
EmV2β1
r f Dn+ E2β1
E f β2
�
1− σ∞σ0
�
tanh(β2ρ)�
csch(β∗1ρ)
sinh(β∗1ρ) +�
EmV2β1
r f Dn+ E2β1
E f β2tanh(β2ρ)
�
cosh(β∗1ρ)
C3 =σ∞
��
σ0
σ∞− 1�
sinh(β∗1ρ)−EmV2β1
r f Dncosh(β∗1ρ)
�
sech(β2ρ)
sinh(β∗1ρ) +�
EmV2β1
r f Dn+ E2β1
E f β2tanh(β2ρ)
�
cosh(β∗1ρ)
This stress state was compared to FEA average stresses and the results were good for a wide range of
properties. Although this analysis assumed an isotropic fiber, it works for anisotropic fibers by replacing
E f , G f , and α f with the corresponding axial properties of an anisotropic fiber.
Finally, the modulus is found by integrating displacements in the outer matrix layers. By this process,
the incremental length and effective modulus are:
∆L(σ0,∆T ) = ∆
wm�
+∆
wo�
and1
E∗=
2∆L(σ0, 0)σ0 Lm
Substituting stresses, C1, and C3 followed by much simplification (in Mathematica, Wolfram Research),
the modulus can be cast as:
E2
E∗= 1+
� E f
Em− 1�
(V1 − Vf ) +E f Vf
EmVmΛ(ρ)
where
Λ(ρ) =Vm
V2
E2
E f
tanh(β∗1ρ)β1ρ
+�
1+�
1− E2
E f
�2tanh(β∗1ρ)β1η
�
tanh(β2ρ)β2ρ
1+ tanh(β∗1ρ)β1η
+ E2
ηE f
tanh(β2ρ)β2
and η = EmV2/(r f Dn). In the limit of no region I (V1 → Vf ) and debonded fiber end (Dn → 0 and
η→∞ to get zero stress on the fiber end), the stresses and modulus reduce to the standard shear lag
result for two layers:
C3 =−σ∞sech(β2ρ) andE2
E∗= 1+
E f Vf
EmVm
tanh(β2ρ)β2ρ
(12)
The results here extend this old result to an encapsulated fiber including both fiber end stress transfer
and an imperfect interface on fiber ends and sides.
Figure 9 compares E/MT and SLC models to numerical single-fiber unit cell (SFUC) models with
traction loading and to lower bound BVE results for R = 100 or R = 104 and for ρ = 5, 20, and 70. For
both R = 100 and R = 104, both the SLC and E/MT models agreed well with both the SFUC and lower
18

Vf
E LB (M
Pa)
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0
2000
4000
6000
8000
10000
12000
14000
ρ = 70
ρ = 20
ρ = 5
R = 100SLC
SFUC
E/MT
A
BVE
Vf
E LB (M
Pa)
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0
20
40
60
80
100
120
140
160
180
200
R = 104
SLC
SFUC
ρ = 70
E/MT
ρ = 20
ρ = 5
BVE
B
Figure 9: Axial composite modulus for R = 100 (A) and R = 104 (B) as a function of fiber volume fraction for three fiber aspectratios. The dashed and solid curves are analytical models based on the new shear lag method (SLC) and an Eshelby/Mori-Tanakaapproach (E/MT), respectively. The dotted curves are numerical results with traction boundary conditions for a single-fiber unitcell (SFUC). The symbols are lower bound, Monte Carlo BVE results with error bars indicating their standard deviations.
bound BVE. In summary, both the SLC and E/MT models accurately predict lower bound modulus for
an aligned, short fiber composite for all tested values of R and ρ. They track the lower bound because
the models are based on an assumption of uniform far-field stress. Because upper and lower bound
results are fairly close for R ≤ 100, the SLC and E/MT models are also close to upper bound results
within this range. But, for R > 100, these models should be recognized as providing pessimistic, lower
bound modulus predictions.
There is a long history of refining analytical models for short fiber composites based on analysis of
the single-fiber geometry [9]. Because the SLC and E/MT models agree with refined numerical models
for lower bound modulus, this half of the problem is “solved,” leaving little room for seeking improved
lower bound models. The development of better analytical models for upper bound modulus (e.g., using
displacement boundary conditions) is tempting, but we claim is doomed to limited success. The best
such analytical modeling could achieve would be to agree with numerical RVE results with periodic
boundary conditions. Section 3.2 shows those results also give lower bound results for R > 100. In
summary, future analytical modeling should focus on finding an upper bound modulus using non-unit-
cell methods.
3.4. Can an analytical model account for 3D fibers and for imperfect interfaces?
Because analytical models agree with most lower bound BVE results and with upper bound BVE
results for R ≤ 100, we hypothesize that 3D analytical modeling would agree similarly with 3D BVE
19

modeling, even though the 3D BVE modeling is not available. This section compares 3D analytical
modeling (an axisymmetric analysis), to numerical, axisymmetric, single-fiber unit cell results (which
is the only unit cell amenable to axisymmetric analysis). In addition, this section investigates imperfect
interface effects [7, 28]. Unfortunately, an Eshelby analysis [2] cannot be extended to modeling of
imperfect interfaces. An Eshelby analysis works by exploiting the observation that elliptical fibers have
constant stress; this property allows replacement methods to find modulus [1, 25]. When the interfaces
are imperfect [28], however, the stresses in an elliptical fiber are no longer constant (as confirmed by
FEA modeling), which means an Eshelby approach no longer works. In contrast, the SLC model derived
above includes imperfect interfaces. This section therefore compares an axisymmetric SLC model to
converged, axisymmetric FEA calculations with imperfect interface elements [29] to verify if the SLC
model works in 3D and if it correctly models imperfect interfaces.
The SLC analysis in the previous section was for the 2D problem. It can easily be extended to an
axisymmetric analysis for an end-capped fiber cylinder simply by redefining volume fractions, ∆, and
the shear lag parameters β1 and β2. The fiber volume fraction within region II becomes
V1 =πr2
f L f
πr2m L f
=ρr2
f
(r f +∆)2
where ∆ is found by solving the following cubic equation
Vf =πr2
f L f
πr2m Lm
=ρr3
f
(r f +∆)2(ρr f +∆)
The shear lag parameters become [7]:
β21 =−
4GmV2
Em(V2 + ln V1)and β2
2 =
4E2
E f Em
V2
2G f− 1
Gm
�
V2
2+ 1+ ln V1
V2
�
+ 2V2
r f Dt
After these changes, all other equations in the SLC model are the same.
Figure 10 compares SLC models to FEA analysis of an axisymmetric model using periodic displace-
ment or traction boundary conditions as a function of interface parameter for three different aspect
ratios, two R values, and all for Vf = 0.15. In these calculations, the two interface parameters were
made equal Dn = Dt and high values on the right correspond to the perfect interface limit. The SLC
model accurately reproduces the numerical results and therefore provides a useful model for studying
both 3D (cylindrical fibers) and imperfect interface effects. The SLC model falls between numerical re-
sults with displacement and traction boundary conditions and is closer to the traction results. This trend
20

Dt = Dn (MPa/mm)
E (M
Pa)
10-2 10-1 10-0 101 102 103 104 105 106 107 108 109 1010 0
2000
4000
6000
8000
10000
12000
14000
16000
ρ = 70
ρ = 20
ρ = 5
R = 100, Vf = 0.15AE/MT
SLC
FEA Disp
FEA Traction
Dt = Dn (MPa/mm)
E (M
Pa)
10-410-310-210-110-0 101 102 103 104 105 106 107 108 1091010
10-1
100
101
102
ρ = 70
ρ = 5
ρ = 20
R = 105, Vf = 0.15B E/MT
FEA Traction
SLCFEA Disp
Figure 10: Axial composite modulus for Vf = 0.15 as a function of fiber/matrix imperfect interface parameter and for three fiberaspect ratios. The open and solid symbols are upper and lower bound, axisymmetric, numerical calculations, respectively. Thesolid curves are axisymmetric version of the new shear lag solution. The dashed lines on the right are 3D Eshelby/Mori-Tanakaapproach results for a perfect interface. Note that the R= 105 plot uses a log axis.
is likely because the SLC model is based on traction boundary conditions. Because an Eshelby analysis
[2] cannot account for imperfect interfaces, it is plotted on the right as short, dashed horizontal lines
representing the 3D (ellipsoidal fibers), perfect-interface, E/MT result [1, 2, 25]. Contrary to the Russel
[25] approach of approximating the Eshelby tensor for high aspect ratio fibers, these calculations used
the exact Eshelby tensor for ellipsoidal inclusions given in Ref. [2]. The Eshelby analysis is inconsistent.
It is below numerical results for ρ = 5, but moves above it as ρ increases.
3.5. Other Properties
For mean field modeling of random or partially ordered composites, one needs all mechanical prop-
erties of the unit cell with random, aligned fibers. Most work focuses on analysis for E(r)y y because it is
the property that is most affected by fiber aspect ratio, ρ. Christensen [1] shows that for an Eshelby [2]
analysis, the shear modulus is independent of ρ and therefore equal to the shear modulus of a continu-
ous fiber composite. Similarly, the transverse modulus, E(r)x x , and Poisson’s ratio, νy x , may only weakly
be affected by ρ. In other words, once E(r)y y is found, the remaining properties are assumed to follow
by simpler methods. We checked this conventional wisdom with the numerical BVE results. Figure 11
plots E(r)x x , G(r)x y , and ν (r)y x as a function of ρ for two R values and all for Vf = 0.2. For R = 100, all these
properties are nearly independent of ρ and thus are equal to results for continuous fiber composites. In
contrast, for R = 105, E(r)x x and G(r)x y decrease. This behavior will need to be included when doing mean
field modeling of such composites.
21

Fiber Aspect Ratio
E xx a
nd G
xy (M
Pa) a
nd ν
yx
0 10 20 30 40 50 60 70 80 90 100 10-2
10-1
10-0
101
102
103
104
R = 100
R = 100
R = 105
R = 105
Exx Gxy
νyx
Vf = 0.20
Figure 11: Plots of E(r)x x , G(r)x y , and ν (r)y x as a function of fiber aspect ratio for two R values and all for Vf = 0.2. The dashed lines
are for R= 100 and the solid lines are for R= 105.
4. Conclusions
This paper tackled seemingly basic questions whose answers, in our opinion, provide insights for
evaluating past and future literature on short fiber composites. The novel results were to develop
a method for bounding the mechanical properties and use that approach to study a regime that is
not commonly examined (namely large R and large ρ). The numerical experiments showed that for
R < 100, the bounds are rather close and other numerical and analytical models fall within those
bounds and therefore must be close to the correct answer. For R> 100, however, the numerical bounds
diverge and both analytical methods and prior numerical methods based on periodic displacement
boundary conditions degenerate to lower bound results. We do not claim the numerical upper bounds
are predicting the modulus of real materials — they are upper bound results and because of the crude
mesh are not the best upper bounds possible. But, all efforts to seek refined upper bounds suggest that
at large R even improved upper bounds are two or more orders of magnitude higher than results found
by prior methods. Given that some experimental results on reinforcement of elastomers [16, 18] exceed
predictions by analytical or prior numerical models, but do not exceed upper bound BVE results, the
two options are that current modeling methods are inadequate or that we must abandon continuum
mechanics. The upper bound results here demonstrate the answer might be the former.
Analytical models typically treat a single fiber. The Eshelby/ Mori-Tanaka approach [2, 3] and the
new shear lag method presented here, agreed well with lower bound, numerical, single-fiber models,
but gave no information about upper bound modulus for high R. The new shear lag method adds
22

modeling for imperfect interfaces. It is not worth the effort to seek “improved” analytical models
because there is little room to improve agreement with numerical modeling on the same structure.
The more interesting problem is how to avoid degenerating to a lower bound results. The next tasks
for short fiber composite modeling should be to develop a new approach to analytical modeling that
can predict upper bound moduli for all values of R and to extend that modeling to composites with
non-aligned fibers by averaging over a fiber distribution function [1].
Acknowledgements
This work was support, in part, by the National Science Foundation grant CMMI 1161305 and by
the USDA Forest Products Lab under 11-JV-11111129-137. We thank an anonymous reviewer for many
insights that lead to significant revisions and hopefully an improved presentation.
Appendix
A 2D, plane-strain Eshelby analysis [2] can be derived by following Christensen [1], which is based
on Russel [25]. We begin by specifying ε11 = ε0, ε22 = εr , and ε33 = 0, where the fiber is the 1 direction
and the 3 direction is the thickness direction with zero strain for a plane-strain analysis. Modifying
Russel [25] with a plane-strain constitutive law and requiring only the stress in the 2 direction to be
zero, the effective fiber direction modulus and Poisson’s ratio become:
E∗11 = E(r)m
�
1− Vf (A1111 − A1122ν∗12)�
and ν∗12 =ν (r)m − Vf
�
A2211 + ν (r)m A1111�
1− Vf�
A2222 + ν(r)m A1122
�
where Ai jkl are elements of the fourth-rank tensor that relates Eshelby transformation strain to applied
strain:
εTi j = Ai jklε
0kl
Continuing along a 2D plane-strain analog of the Russel analysis [25], the Ai jkl terms can be found
from
A1111 =a22 b11 − a12 b12
a11a22 − a12a21A1122 =
a22 b12 − a12 b22
a11a22 − a12a21
A2211 =a11 b12 − a21 b11
a11a22 − a12a21A2222 =
a11 b22 − a21 b12
a11a22 − a12a21
23

where
a11 = ∆λ(S1111 + S2211) + 2∆GS1111 +λm + 2Gm
a12 = ∆λ(S1122 + S2222) + 2∆GS1122 +λm
a21 = ∆λ(S1111 + S2211) + 2∆GS2211 +λm
a22 = ∆λ(S1122 + S2222) + 2∆GS2222 +λm + 2Gm
b11 = b22 =−∆λ− 2∆G =−(λ f −λm)− 2(G f − Gm)
b12 = b21 =−∆λ=−(λ f −λm)
and Si jkl are elements of the 2D, plain-strain Eshelby tensor. The terms λ f and λm are the Lamé
parameters for the fiber and matrix. For results, Russel [25] substituted the 3D Eshelby tensor [2] (as
approximated for large aspect ratio [1, 25]) and took limiting results for small Vf . Here we need the
2D plane-strain Eshelby tensor [2] evaluated exactly to handle small aspect ratios and we used the full
modulus and Poisson’s ratio expressions instead of their low Vf limits. Fortunately, Eshelby [2] provides
explicit 2D plane-strain results for the case with elliptical axes a > b (ρ = a/b) and c =∞:
S1111 =1
2(1− νm)
�
1+ 2ρ
(ρ+ 1)2+
1− 2νm
ρ+ 1
�
S1122 =1
2(1− νm)
�
1
(ρ+ 1)2−
1− 2νm
ρ+ 1
�
S2211 =1
2(1− νm)
�
ρ2
(ρ+ 1)2−(1− 2νm)ρρ+ 1
�
S2222 =1
2(1− νm)
�
ρ(ρ+ 2)(ρ+ 1)2
+(1− 2νm)ρρ+ 1
�
Here νm is the unreduced matrix Poisson’s ratio and it is related to the plane-strain Poisson’s ratio by
νm = ν (r)m /(1+ ν(r)m ).
References
[1] R. M. Christenson, Mechanics of Composite Materials, John Wiley & Sons, New York, 1979.
[2] J. D. Eshelby, The determination of the elastic field of an ellipsoidal inclusion and related prob-
lems, Proc. R. Soc. Lond. A 241 (1957) 376–396.
[3] T. Mori, K. Tanaka, Average stress in matrix and average elastic energy of materials with misfitting
inclusions, Acta Metallurgica 21 (1973) 571–574.
24

[4] L. N. McCartney, Analytical models of stress transfer in unidirectional composites and cross-ply
laminates, and their application to the prediction of matrix/transverse cracking, in: J. N. Reddy,
K. L. Reifsnider (Eds.), Proc. IUTAM Symposium, Blacksburg, VA, 1991, 1992, pp. 251–282.
[5] J. A. Nairn, On the use of shear-lag methods for analysis of stress transfer in unidirectional com-
posites, Mech. of Materials 26 (1997) 63–80.
[6] J. A. Nairn, D.-A. Mendels, On the use of planar shear-lag methods for stress-transfer analysis of
multilayered composites, Mechanics of Materials 33 (2001) 335–362.
[7] J. A. Nairn, Generalized shear-lag analysis including imperfect interfaces, Advanced Composite
Letters 13 (2004) 263–274.
[8] A. A. Gusev, Representative volume element size for elastic composites: A numerical
study, Journal of the Mechanics and Physics of Solids 45 (9) (1997) 1449 – 1459.
doi:http://dx.doi.org/10.1016/S0022-5096(97)00016-1.
URL http://www.sciencedirect.com/science/article/pii/S0022509697000161
[9] C. L. Tucker, E. Liang, Stiffness predictions for unidirectional short-fiber composites: Review and
evaluation, Composite Science and Technology 59 (1999) 655–671.
[10] A. A. Gusev, Numerical identification of the potential of whisker- and platelet-filled poly-
mers, Macromolecules 34 (9) (2001) 3081–3093. arXiv:http://dx.doi.org/10.1021/ma001979b,
doi:10.1021/ma001979b.
URL http://dx.doi.org/10.1021/ma001979b
[11] H. Bohm, A. Eckschlager, W. Han, Multi-inclusion unit cell models for metal matrix composites
with randomly oriented discontinuous reinforcements, Computational Materials Science 25 (1–2)
(2002) 42 – 53. doi:http://dx.doi.org/10.1016/S0927-0256(02)00248-3.
URL http://www.sciencedirect.com/science/article/pii/S0927025602002483
[12] H. R. Lusti, A. A. Gusev, Finite element predictions for the thermoelastic properties of nanotube re-
inforced polymers, Modelling and Simulation in Materials Science and Engineering 12 (3) (2004)
S107.
URL http://stacks.iop.org/0965-0393/12/i=3/a=S05
25

[13] Y. Hua, L. Gu, Prediction of the thermomechanical behavior of particle-reinforced
metal matrix composites, Composites Part B: Engineering 45 (1) (2013) 1464 – 1470.
doi:http://dx.doi.org/10.1016/j.compositesb.2012.09.056.
URL http://www.sciencedirect.com/science/article/pii/S1359836812006063
[14] B. Mortazavi, M. Baniassadi, J. Bardon, S. Ahzi, Modeling of two-phase random composite mate-
rials by finite element, mori–tanaka and strong contrast methods, Composites Part B: Engineering
45 (1) (2013) 1117 – 1125. doi:http://dx.doi.org/10.1016/j.compositesb.2012.05.015.
URL http://www.sciencedirect.com/science/article/pii/S1359836812003411
[15] E. Ghossein, M. Lévesque, A comprehensive validation of analytical homogenization models: The
case of ellipsoidal particles reinforced composites, Mechanics of Materials 75 (2014) 135–150.
[16] V. Favier, S. C. S. G. R. Canova, J.-Y. Cavaille, Mechanical percolation in cellu-
lose whisker nanocomposites, Polymer Engineering and Science 37 (1997) 1732–1739.
doi:10.1002/pen.11821.
URL http://dx.doi.org/10.1002/pen.11821
[17] M. D. Frogley, D. Ravich, H. Wagner, Mechanical properties of carbon nanoparticle-reinforced elas-
tomers, Composites Science and Technology 63 (11) (2003) 1647 – 1654, modeling and Charac-
terization of Nanostructured Materials. doi:http://dx.doi.org/10.1016/S0266-3538(03)00066-6.
URL http://www.sciencedirect.com/science/article/pii/S0266353803000666
[18] J. R. Capadona, K. Shanmuganathan, D. J. Tyler, S. J. Rowan, C. Weder, Stimuli-Responsive
Polymer Nanocomposites Inspired by the Sea Cucumber Dermis, Science 319 (5868)
(2008) 1370–1374. arXiv:http://www.sciencemag.org/cgi/reprint/319/5868/1370.pdf,
doi:10.1126/science.1153307.
URL http://www.sciencemag.org/cgi/content/abstract/319/5868/1370
[19] F. Deng, M. Ito, T. Noguchi, L. Wang, H. Ueki, K.-i. Niihara, Y. A. Kim, M. Endo, Q.-S. Zheng,
Elucidation of the reinforcing mechanism in carbon nanotube/rubber nanocomposites, ACS
Nano 5 (5) (2011) 3858–3866, pMID: 21476510. arXiv:http://dx.doi.org/10.1021/nn200201u,
doi:10.1021/nn200201u.
URL http://dx.doi.org/10.1021/nn200201u
26

[20] J. A. Nairn, Material point method (NairnMPM) and finite element analysis (NairnFEA) open-
source software, http://code.google.com/p/nairn-mpm-fea/ (2014) [cited 1 Nov 2014].
URL http://code.google.com/p/nairn-mpm-fea/
[21] Z. Hashin, S. Shtrikman, On some variational principles in anisotropic and nonhomogeneous
elasticity, J. Mech. Phys. Solids 10 (1962) 335–342.
[22] Z. Hashin, Elasticity of random media, Transactions of the Society of Rheology 9 (1) (1965)
381–406.
[23] Z. Hashin, Mechanics of Composite Materials, Pergamon Press, 1969, Ch. Theory of Composite
Materials, pp. 201–242.
[24] P. S. Steif, S. F. Hoyson, An energy method for calculating the stiffness of aligned short-fiber
composites, Mechanics of Materials 6 (1987) 197–210.
[25] W. B. Russel, On the effective moduli of composite materials: Effect of fiber length and geometry
at dilute concentrations, Z. Angew. Math. Phys. 24 (1973) 581–600.
[26] M. R. Piggott, Load Bearing Fiber Composites, Pergamon Press, Oxford, UK, 1980.
[27] D. Hull, T. W. Clyne, An Introduction to Composite Materials, 2nd Edition, Cambridge University
Press, 1996.
[28] Z. Hashin, Thermoelastic properties of particulate composites with imperfect interface, Journal of
the Mechanics and Physics of Solids 39 (6) (1991) 745–762.
[29] J. A. Nairn, Numerical implementation of imperfect interfaces, Computational Materials Science
40 (2007) 525–536.
27