Embed Size (px)
Citation preview

Nicholson’s Blowflies Revisited:
A Fuzzy Modeling Approach∗
Iosef Rashkovsky and Michael Margaliot†
School of Electrical Engineering
Tel Aviv University, Israel
4th April 2006
Abstract
We apply fuzzy modeling to derive a mathematical model for abiological phenomenon: the regulation of population size in the Aus-tralian sheep-blowfly Lucilia cuprina. This behavior was described byseveral ethologists and fuzzy modeling allows us to transform theirverbal descriptions into a well-defined mathematical model. The be-havior of the resulting mathematical model, as studied using bothsimulations and rigorous analysis, is congruent with the behavior actu-ally observed in nature. We believe that the fuzzy modeling approachdemonstrated here may supply a suitable framework for biomimicry,that is, the design of artificial systems based on mimicking naturalbehavior.
keywords: Linguistic modeling, differential equations with time-delay, peri-odic behavior, switched systems with time delay, population dynamics, emer-gent behavior.
∗An abridged version of this paper was accepted for presentation at the IEEE WorldCongress on Computational Intelligence (WCCI2006).
†Corresponding author: Dr. Michael Margaliot, School of Electrical Engineering–Systems, Tel Aviv University, Tel Aviv 69978, Israel. Tel: +972-3-6407768; Fax: +972-3-6407095; Homepage: www.eng.tau.ac.il/∼michaelm; Email: [email protected]
1

1 Introduction
In many of the “soft sciences” (e.g., psychology, sociology, ethology) scientistsprovided verbal descriptions and explanations of various phenomena based onfield observations. Obtaining a suitable mathematical model, describing theobserved system or behavior, can greatly enhance our ability to understandand study it in a scientific manner. Indeed, mathematical models are veryuseful in summarizing and interpreting empirical data. Furthermore, oncederived, such models allow us to analyze the system both qualitatively andquantitatively using mathematical tools.
Tron and Margaliot [19, 20] advocated fuzzy logic theory as the most suit-able tool for transforming verbal descriptions of various observed phenomenainto suitable mathematical models. This approach is congruent with the no-tion that the real power of fuzzy logic is in its ability to handle and manip-ulate linguistic information based on perceptions (see, e.g., [7, 12, 13, 22]).Indeed, fuzzy modeling is routinely used to transform the knowledge of anexpert, be it a physician or a process operator, into a computer algorithm.Yet, not enough attention has been paid to its possible use as a tool to assisthuman observers in transforming their verbal descriptions into mathematicalmodels.
The fuzzy modeling approach is based on transforming the verbal descrip-tion into a set of If-Then rules stated using natural language. Inferencingthis rule-base yields a well-defined mathematical model. This approach hasseveral advantages. The fuzzy rule-base represents the real system in a formthat corresponds closely to the way humans perceive it. Thus, the model isunderstandable, even by non-professionals, and each parameter has a readilyperceivable meaning. The model is flexible and can be easily altered to in-corporate new phenomena. The information is kept in three different forms:the original verbal description, the fuzzy rule-base, and the mathematicalmodel. The interplay between these representations provides a synergisticview of the system. For example, suppose that simulations of the mathemat-ical model indicate that its behavior is different than that of the real system.By analyzing the simulations, it is sometimes possible to find which fuzzyrule must be altered and how. Since the rules are stated in natural language,any change in the rules can be interpreted in terms of a change of the originalverbal description. Thus, the modeling process can also be used to prove orrefute the modeler’s ideas as to how the natural system behaves and why.
Several factors make the fuzzy approach particularly suitable for devel-
2

oping models of animal behavior. First, ethologists usually provide detailedverbal descriptions of the phenomena they are studying. Some of these de-scriptions can be easily converted into fuzzy rules. For example, Fraenkel andGunn describe the behavior of a cockroach, that becomes stationary when alarge part of its body surface is in contact with a solid object, as: “A highdegree of contact causes low activity . . . ” [8, pp. 23]. Second, mathematicalmodels of animal behavior may also have interesting engineering applications.In fact, the development of artificial products or machines that mimic biolog-ical phenomena, sometimes referred to as biomimcry, is recently attractingconsiderable interest (see, e.g., [1, 14, 5]). The basic idea is that duringtheir course of evolution living systems developed sophisticated mechanismsfor solving various challenges. Designers of artificial products, that mustfunction in the real world, are often required to address similar problems.Thus, information extracted from biological behavior may inspire suitableartificial designs. For example, animals must develop efficient mechanismsfor orienting themselves in space. Similar problems arise in robotics, as plan-ning and realizing oriented movements is of crucial importance in designingautonomous robots.
An important component in biomimicry is the ability to perform reverseengineering of an animal’s functioning and then implement this behaviorin an artificial system. We believe that the fuzzy modeling approach maybe very suitable for addressing biomimicry in a systematic manner. Namely,start with a verbal description of an animal’s behavior (e.g., foraging in ants)and, using fuzzy logic theory, obtain a mathematical model of this behaviorwhich can be implemented in artificial systems (e.g., autonomous robots).
In this paper, we use the fuzzy modeling approach to derive a mathemati-cal model for a phenomenon of animal behavior: the regulation of populationsize in the blowfly Lucilia cuprina. The mechanisms involved in the regula-tion process were described and explained in the classical works of Nichol-son [16, 17]. The behavior of the resulting mathematical model, as studiedusing both simulations and rigorous analysis, is congruent with the behavioractually observed in nature.
The remainder of this paper is organized as follows. Section 2 reviews theverbal descriptions and explanations given by Nicholson. Section 3 appliesfuzzy modeling to transform these descriptions into a mathematical model.Section 4 analyzes the mathematical model. Sections 5 describes the resultsof simulations and compares these to the behavior actually observed in na-ture. Section 6 discusses the quantitative aspects of the model. The final
3

section concludes.
2 The self-adjustment of population in the
Lucilia cuprina
Population dynamics plays a fundamental role in the animal kingdom. So-phisticated feedback mechanisms regulate the size of the population, adjust-ing it to the constantly changing internal and external factors.
In a classic study, Nicholson [17] analyzed the regulation of population sizein laboratory colonies of the Australian sheep-blowfly Lucilia cuprina. Heintroduced a small number of flies into a cage and, from then on, maintainedpredetermined conditions leaving the population to its own device.
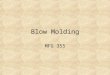
Although the environment remained invariable, the population size showedlarge-amplitude quasi-periodic oscillations [4] (see Fig. 1). One of the cul-tures was maintained for a period of two years and the oscillations continuedfor this entire period of time.
Many different interacting factors regulate the population’s size and leadto this nontrivial behavior. The first of these is competition between theindividual members of the population for the fixed amount of food. If thepopulation size is small, then the competition is not severe and interbreedingleads to an increase in the population size. However, at a certain point thefood supply is no longer sufficient to maintain the population. This leads toincreased mortality and decreased natality. The population size decreases,and the competition is relaxed again, thus completing a cycle.
The regulating mechanisms are further complicated because of the var-ious stages in the blowfly’s life cycle: (1) adults interbreed and lay eggs;(2) immature larva hatch from the egg; (3) the larva turn into pupa; and(4) the pupa transforms into adult.
Nicholson’s experiments are interesting for several reasons. First, it issurprising that fixed conditions, in a controlled environment, lead to suchextreme oscillations in the population size. Second, from a dynamic systemspoint of view, the quasi-periodic behavior is not trivial and raises interestingquestions. For example, is the behavior chaotic [10] or, alternatively, theresult of a periodic process “probed” by stochastic factors?1 Third, Nichol-
1For more on the the interplay between deterministic and stochastic forces in populationdynamics, see [3].
4

0 50 100 150 200 250 300 3500
1000
2000
3000
4000
5000
6000
7000
8000
9000
day
Figure 1: Fluctuations in laboratory populations of Lucillia cuprina.
son was able to separate the food supply of the adult flies and the larvae.This allowed him to experiment different types of competition. For example,by supplying a surplus quantity of food for the adult flies and limiting thelarval food, it is possible to isolate the effect of larval competition. Finally,the mechanisms that regulate the population usually operate at the level ofindividual animals. For example, if a larva does not receive sufficient food,then it will not pupate. Yet, the combined effect is an emergent behavior reg-ulating the total population size. This was already noted by Nicholson [17,p. 154]: “...each of these groups has characteristics which are more than thesum of those of the constituent individuals.”
Population dynamics is a very rich field. Methods for analyzing popula-tion processes can be roughly divide into two groups. The first group includesmethods based on applying statistical tools to analyze the time-series. Thesecond group includes methods that develop a mathematical model for the
5

observed phenomena. For more information on these topics, see [11, 3] andthe many references therein. In the next section, we use fuzzy modeling todevelop a mathematical model for the behavior described by Nicholson.
3 Mathematical modeling
The fuzzy modeling approach [19] transforms verbal descriptions into math-ematical models using several stages. First, the variables in the model aredetermined. For example, in a description of a moving animal, the animal’slocation is a variable in R
3. Second, the verbal information is stated as fuzzyrules relating the variables. These rules include fuzzy terms that must bedefined mathematically using suitable membership functions. Finally, infer-encing the rules leads to a well-defined mathematical model.
Here we use a slightly different approach. Following the seminal paper [9],we begin by writing down a balance equation for the population of sexuallymature adults at time t which we denote by x(t). The rate of change in x(t)is the difference between the rate of recruitment to the adult population r(t),and the total adult death rate d(t):
x(t) = r(t) − d(t). (1)
The death rate is modeled by the linear function
d(t) = δx(t), (2)
where δ > 0 is the per capita death rate.Thus, we assume that the functional form of the model is known, ex-
cept for the function r(t) [21]. We use fuzzy modeling to determine thefunction r(t), and thus complete the mathematical model.
3.1 Fuzzy modeling
3.1.1 The fuzzy rules
Our rules are based on the following description [17, p.156]:
“When the numbers of adults were high such vast numbers of eggswere laid that all of the food provided was consumed while the lar-vae were still too small to pupate; consequently no adult offspring
6

resulted from eggs laid during such periods. The adult numberstherefore dwindled progressively, until a point was reached atwhich the intensity of larval competition became so reduced thatsome of the larvae attained a sufficient size to pupate. These gaverise to egg-lying adults after a developmental period of about twoweeks.”
Let T denote the development time, that is, the time needed for a laid eggto turn into a sexually mature adult. According to the verbal description,if the number of adult flies at time t − T is high, then the recruitment rateat time t will be zero. On the other hand, if the number of adult flies attime t − T is low, then the recruitment rate at time t will be positive. Westate this as two fuzzy rules:
• If x(t − T ) is high then r(t) = 0
• If x(t − T ) is low then r(t) = b
where b > 0.Note that we make no distinction between adult competition and larval
competition. We assume that both forms of competition lead to the sameresult: a diminishing recruitment rate. Yet, this seems to be in agreementwith Nicholson’s observations [17, p. 157]: “In cultures governed by lar-val competition only, a large number of flies laid so many eggs that larvalover-crowding prevented any offspring from reaching maturity. In culturesgoverned by adult competition only, adult over-crowding prevented any eggsbeing produced.”
3.1.2 Defining the fuzzy terms
The next step is to define the fuzzy terms in the rules using suitable mem-bership functions. We use
µhigh(z) = ∆(z; ch, wh), µlow(z) = ∆(z; cl, wl),
where wh, wl > 0, 0 < cl < ch, and
∆(z; c, w) :=
0 if z ≤ c − w
(z − c + w)/w if c − w < z ≤ c
(−z + c + w)/w if c < z ≤ c + w
0 if c + w < z
7

c + wcz
c − w
1
∆(z; c, w)
Figure 2: The function ∆(z; c, w).
(see Fig. 2).We can now inference the fuzzy rules to obtain a mathematical formula
for r(t).
3.1.3 Fuzzy inferencing
We use simple additive inferencing (see, e.g., [2]). This yields:
r(t) = bµlow(x(t − T )). (3)
It follows from this equation that the parameter b is the maximal repro-duction rate that the population, as a whole, can achieve. Substituting (2)and (3) in (1) yields the complete model:
x(t) = b∆(x(t − T ); cl, wl) − δx(t). (4)
It is important to note that this model, or any first-order model for thatmatter, is an oversimplified representation of the real dynamics. A moreaccurate model must take into account many additional factors. First, thefour distinct life stages of the flies. Second, the fact that the developmenttime T may depend on various external factors and also vary between dif-ferent flies. Third, a crowded environment cannot be characterized by thesingle function x(t). A crowded environment is actually a dynamic situationexperienced differently by the members of the population. The larvae thatdevelop most rapidly and emerge first are likely to experience a very differ-ent environment than those that emerge later (see the very lucid paper [15]).Summarizing, we cannot expect that this model, for any function r, willreproduce the real data precisely, and we must pose a more modest aim.
8

Namely, a model that accounts for some of the salient features apparent inthe real data.
In the next two sections, we study the behavior of (4) using both rigorousanalysis and simulations.
4 Analysis
Denoting y(t) := x(t)/b yields
y(t) = ∆ (by(t − T ); cl, wl) − δy(t)
= ∆ (y(t − T ); c, w) − δy(t), (5)
where c := cl/b and w := wl/b. It follows from standard arguments [6,Chapter VI] that (5) admits a unique solution y(t), t ≥ 0, for any initialcondition
y(t) = ϕ(t), t ∈ [−T, 0],
where ϕ is a continuous function.Substituting (3) in (5) yields
y(t) =
−δy(t) if y(t − T ) ≤ c − w1
w(y(t − T ) − c + w) − δy(t) if c − w < y(t − T ) ≤ c
1
w(−y(t − T ) + c + w) − δy(t) if c < y(t − T ) ≤ c + w
−δy(t) if c + w < y(t − T ).
(6)
Note that this is a switched system where both the dynamics and the switching-law include time-delay.
4.1 Local behavior
The equilibrium solutions of (5) are y(t) ≡ ye where ye satisfies
∆(ye; c, w) = δye.
The number and location of solutions depend on the relation between theparameters. We will assume that cl − wl > 0 (see Fig. 2) so c > w. In thiscase,
• if δ > 1/c then (5) has a single equilibrium y(t) ≡ 0;
9

• if δ = 1/c then (5) has two equilibrium solutions y(t) ≡ 0 and y(t) ≡ c;
• if δ < 1/c then (5) has three equilibrium solutions y(t) ≡ y0 := 0,y(t) ≡ y1 := c−w
1−δwand y(t) ≡ y2 := c+w
1+δw.
In the first case, the death rate is so high that the population dwindles untilit reaches complete extinction. The second case is “non generic”, as theparameters must satisfy an equality relation. Thus, we assume from here onthat δ < 1/c. In this case, we also have δ < 1/w, so y0 < y1 < y2.
Proposition 1 Suppose that c > w and that δ < 1/c. Then, y(t) ≡ 0 is
locally asymptotically stable and y(t) ≡ y1 and y(t) ≡ y2 are unstable.
Proof. See the Appendix.The stability of y0 implies of course that if the initial population is too
small, then it will diminish completely. The fact that y1 and y2 are unstablesuggests that for other initial conditions, we may expect nontrivial behavior.
4.2 Global behavior
We begin by showing that the population size is always bounded. It followsfrom (5) that
−δy(t) ≤ y(t) ≤ 1 − δy(t), ∀t.
This immediately yields the following result.
Proposition 2 Suppose that y(0) > 0. Then,
0 < y(t) ≤ y(0) + 1/δ, ∀t ≥ 0. (7)
In other words, the population size always remains bounded above and below.Note that this agrees with the behavior observed in nature [17, p. 156]: “Thedensity-governed system of reaction just described held the population in astate of stability, in the sense that it prevented both indefinite increase andindefinite decrease in numbers.”
The next result shows that, under suitable conditions, the solution y(t)is periodic. For z ∈ R and times t1 < t2, we use the notation y[t1, t2) > z asa shorthand for “y(t) > z for all t ∈ [t1, t2)”.
10

T τ4 T + τ3T + τ2 T + τ4 T + τ5τ1 τ2 T + τ1τ3
t
c + w
c
c − w
ητ50
I1 I2 I3 I4 I5 I6 I7
y(t)
Figure 3: A schematic view of one cycle of the periodic function y(t).
Theorem 1 Suppose that there exists a time τ such that y[τ −T, τ) > c+wand y(τ) = c + w. Suppose also that the following conditions hold
lnc + w
c − w< δT (8)
c lnc + w
c< w(1 − wδ − cδ) (9)
δw(c + w) exp(δT ) < c lnc2
c2 − w2(10)
exp(−δT ) +1
δwln
c2
c2 − w2<
1
δ(c + w)exp(δT ). (11)
Then the solution y(t), t ≥ τ , of (5) is a periodic function.
The proof, given in the Appendix, shows that each period has the schematicform shown in Fig. 3 (where, without loss of generality, τ is assumed to bezero). In particular, there are two maxima per cycle. Note that Fig. 3 also
11

implies that y(t) repeatedly crosses the values of the equilibrium solutions y1
and y2 since c − w < y1 < y2 < c + w. This is in agreement with Nichol-son’s observations [17, p. 156]: “. . . but, because there was a lag of about twoweeks between the initiation of corrective reaction and its operation uponthe population, the population change inducing the reaction continued with-out change in direction for this period, so causing excessive reaction and analternating over- and under-shooting of the equilibrium position.”
The periodic behavior implies, of course, that the moving time averageof y(t) converges to a constant. Again, this agrees with Nicholson’s obser-vations [17, p. 156]: “In each of the numerous experimental cultures of L.
cuprina which have now been studied, it was found that, although therewas commonly a great difference between mortality and natality during anygiven day, these two factors became equal in intensity over periods of sev-eral months. Thus, in spite of the usual great disparity between mortalityand natality at any given time in L. cuprina cultures held under constantconditions, the innate tendency of the insects to multiply was found to becounteracted exactly by density induced reaction.”
5 Simulations
Our simulations were motivated by one of the experiments performed byNicholson [16, 17]. To isolate the effect of larval competition, Nicholsonprovided surplus food for the adult flies while limiting the food supply forthe larvae. In one of his experiments, Nicholson examined two cultures withidentical conditions except that the daily quota of meat for the larvae was50g in one culture and 25g in the second.
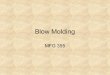
In order to simulate this scenario, we need to relate the daily quota ofmeat to the parameters in our model. If the quota of meat increases, then thecompetition is relaxed and more eggs will eventually turn into adults. Thismeans that the value of the parameter b increases. Also, the recruitment ratewill be greater than zero for a larger range of egg numbers. This suggeststhat the definition of the term low must include a larger set of values. Thus,we simulated (4) with the parameters
b = 20m, cl = 8m, wl = 6m, δ = 0.15, and T = 14.8,
where m represents the daily quota of meat. The initial condition was x(t) =20m for t ∈ [−T, 0].
12

0 20 40 60 80 100 1200
500
1000
1500
2000
2500
3000
day
Figure 4: The function x(t) for m = 50 (solid line) and m = 25 (dashed line).
Fig. 4 depicts x(t) as a function of time for two values of m. It may beseen that the quantitative behavior in both cases is similar. Increasing mleads to a scaling up of x(t). This is congruent with the the results observedby Nicholson [17, p. 157]: “...the average numerical level of a populationcontrolled by food supply varies directly with the quantity of this supply ...the violence and other characteristics of the oscillation are unaltered by thedifference in the rate of food supply.”
6 Quantitative behavior
Although we mainly considered qualitative behavior, our results seem toprovide a reasonable quantitative agreement with the results measured byNicholson. Life history data shows that the time needed for eggs to developinto sexually mature eggs is T = 14.8± 0.4 days [9]. Gurney et al. [9] found
13

that in Nicholson’s data:
2.5 <Tcycle
T< 2.7, 29 <
xmax
xmin
< 53,
where Tcycle is the period of one cycle and xmax (xmin) is the largest (smallest)number of adult flies during the cycle.
In the simulations described above, we used T = 14.8. Analyzing theresults for x(t) yields
Tcycle
T= 2.55,
xmax
xmin
= 37.9,
and these values agree with the actual measurements.
7 Discussion
In many of the “soft sciences” (e.g., psychology, sociology, ethology) scientistsprovided verbal descriptions and explanations of various phenomena based onfield observations. Obtaining a suitable mathematical model, describing theobserved system or behavior, can greatly enhance our ability to understandand study it in a scientific manner. In many case, researchers provided verbaldescriptions and explanations of the observed phenomena. Fuzzy modelingseems to be the most suitable tool for transforming this verbal informationinto analytical models.
We demonstrated this by using fuzzy modeling to develop a mathemati-cal model for the mechanisms that regulate population size as described byNicholson. The resulting model is simple enough to allow a rather completeanalysis. It also provides a reasonable qualitative and quantitative agreementwith the actual results measured by Nicholson. In particular, the model pro-duces the characteristic “double-humped peak” and the periodic behavior.
Our model suggests that the quasi-periodic behavior is produced by aself-sustaining limit cycle perturbed by stochastic factors. The underlyingperiodic behavior is caused by delayed density dependence. This agrees withthe analysis of Gurney et al. [9] who also concluded that the fluctuationsobserved by Nicholson, in the adult food-limited case, are of the limit cycletype.
Recently, considerable research interest is devoted to the design of ar-tificial systems inspired by the behavior of living systems. An important
14

component in this field is the ability to perform reverse engineering of theliving system’s functioning and then implement this behavior in an artificialsystem. We believe that the fuzzy modeling approach may be very suitablefor addressing this problem in a systematic manner. Namely, start with averbal description of an animal’s behavior (e.g., foraging in ants) and, usingfuzzy logic theory, obtain a mathematical model of this behavior which canbe immediately implemented in artificial systems (e.g., autonomous robots).
Appendix: Proofs
Proof of Proposition 1
To analyze the behavior near y(t) = y0, t ∈ [−T, 0], consider a function ϕ(t)such that 0 ≤ ϕ(t) ≤ c − w for all t ∈ [−T, 0]. Then (6) yields y(t) =exp(−δt)y(0), t ∈ [0, T ]. Hence, y[0, T ] ≤ c − w and (6) implies that y(t) =exp(−δt)y(T ), t ∈ [T, 2T ]. Continuing in this fashion yields limt→∞
y(t) = 0.Hence, y0 is locally asymptotically stable.
We now consider the local behavior in the vicinity of y1. Denoting z(t) :=y(t) − y1 yields
z(t) =
−δ(z(t) + y1) if z(t − T ) ≤ c − w − y1
1
wz(t − T ) − δz(t) if c − w − y1 < z(t − T ) ≤ c − y1
− 1
wz(t − T ) − δz(t) + 2 1−δc
1−δwif c − y1 < z(t − T ) ≤ c + w − y1
−δ(z(t) + y1) if c + w − y1 < z(t − T ).
(12)Consider the initial condition y(t) = ϕ(t), t ∈ [−T, 0] with |ϕ(t)− y1| ≤ ε
so |z(t)| ≤ ε for t ∈ [−T, 0]. For ε > 0 sufficiently small (12) yields z(t) =1
wz(t−T )−δz(t). Since δw < 1, standard arguments [18, Proposition 4] imply
that 0 is an unstable equilibrium of z(t), so y1 is an unstable equilibriumof (5). A similar analysis in the vicinity of y2 completes the proof.
Proof of Theorem 1
We will use the following result.
Proposition 3 Consider the delay differential equation
y(t) = c0 + c1y(t) + c2y(t − T ), t ≥ t0,
15

with c1 6= 0 and the initial condition
y(t − T ) = a + exp(c1t)
k∑
i=0
biti, t ∈ [t0, t0 + T ].
Then,
y(t) = exp(c1(t − t0))y(t0) +c0 + c2a
c1
(exp(c1(t − t0)) − 1)
+ c2 exp(c1t)k+1∑
i=1
bi−1
i(ti − ti0)
for all t ≥ t0.Proof. By direct calculation.
Without loss of generality, we assume that τ = 0. We divide the timeaxis into consecutive intervals I1, I2, . . . , and analyze the solution y(t) onevery interval (see Fig. 3). We denote the restriction of y(t) on interval Ii
by yi(t).Interval 1: I1 = [0, T ].Here, y(t−T ) ≥ c+w for all t ∈ I1, so (6) yields y(t) = −δy(t). The solutionalong this interval is then
y1(t) = exp(−δt)(c + w). (13)
It follows that for τ1 := 1
δln c+w
cand τ2 := 1
δln c+w
c−w, we have y1(τ1) = c
and y1(τ2) = c − w. It is easy to verify that (8) implies that τ2 < T .Interval 2: I2 = [T, T + τ1].Here, c < y(t − T ) < c + w for all t ∈ I2, so (6) yields
y(t) = c0 + c1y(t) + c2y(t − T ), (14)
with c0 = (c + w)/w, c1 = −δ, and c2 = −1/w. It follows from (13) that
y(t − T ) = exp(−δt)b0,
with b0 = exp(δT )(c + w). Applying Proposition 3 with t0 = T and k = 0yields
y2(t) =c + w
w
(
w exp(−δt) +1
δ+
(
T − t −1
δ
)
exp(−δ(t − T ))
)
. (15)
16

Substituting t = T + τ1 and using the definition of τ1 yields
y2(T + τ1) = c exp(−δT ) +1
δ−
c
wδln
c + w
c. (16)
It is easy to verify that (9) implies that y2(T + τ1) > c + w.We now examine y2(t). It follows from (15) that
y2(t) = exp(−δt)Q(t), (17)
where Q(t) is a linear polynomial. Using (13) and (14) yields
y(T ) =c + w
w− δy(T ) −
1
wy(0)
= −δy(T )
< 0. (18)
Similarly, (14) and the definition of τ1 yield
y(T + τ1) =c + w
w− δy(T + τ1) −
1
wy(τ1)
= 1 − δy(T + τ1)
> 0. (19)
It now follows from (17), (18), and (19) that there exists tm ∈ I2 suchthat y2(t) < 0 for all t ∈ [T, tm), y2(tm) = 0, and y2(t) > 0 for all t ∈(tm, T + τ1]. Hence, y2 attains a unique minimum at t = tm and is monoton-ically increasing for t > tm. Hence, there exist τ3, τ4, τ5, with T < τ3 < τ4 <τ5 < T + τ1, such that y2(τ3) = c − w, y2(τ4) = c, and y2(τ5) = c + w.Interval 3: I3 = [T + τ1, T + τ2].Here, c − w < y(t − T ) < c for all t ∈ I3, so (6) yields
y(t) = c0 + c1y(t) + c2y(t − T ),
with c0 = (w − c)/w, c1 = −δ, and c2 = 1/w. It follows from (13) that
y(t − T ) = exp(−δt)b0,
17

with b0 = exp(δT )(c+w). Applying Proposition 3 with t0 = T +τ1 and k = 0yields
y3(t) = exp(−δ(t − T − τ1))y2(T + τ1) +c − w
wδ(exp(−δ(t − T − τ1)) − 1)
+c + w
wexp(−δ(t − T ))(t − T − τ1)
=c + w
wexp(−δ(t − T ))
(
w exp(−δT ) −2
δln
c + w
c+
1
δ+ t − T
)
+w − c
wδ, (20)
where the second equation follows from the definition of τ1 and (16). Dif-ferentiating this expression, and using the definition of τ1 and (16), we findthat y3(t) attains a unique maximum at time tm := T−w exp(−δT )+ 2
δln c+w
c.
It is easy to verify that tm < T + τ2. The maximal value is
y3(tm) =1
wδ(c + w)
(
w2 − c2 + c2 exp(δw exp(−δT )))
.
Eq. (20) and the definition of τ2 yield
y3(T + τ2) =c − w
w
(
w exp(−δT ) +1
δln
c2
c2 − w2
)
. (21)
Interval 4: I4 = [T + τ2, T + τ3].Here, y(t−T ) < c−w for all t ∈ I4, so (6) yields y(t) = −δy(t). The solutionalong this interval is then
y4(t) = exp(−δ(t − T − τ2))y3(T + τ2)
= exp(−δ(t − T ))c + w
c − wy3(T + τ2), (22)
where the second equation follows from the definition of τ2. Hence,
y4(T + τ3) = exp(−δτ3)c + w
c − wy3(T + τ2),
and substituting (21) yields
y4(T + τ3) = exp(−δτ3)c + w
w
(
w exp(−δT ) +1
δln
c2
c2 − w2
)
. (23)
18

Using the fact that τ3 < T + τ1 and (10) yields
y4(T + τ3) > c + w. (24)
Interval 5: I5 = [T + τ3, T + τ4].Here, c − w < y(t − T ) < c for all t ∈ I5, so (6) yields
y(t) = c0 + c1y(t) + c2y(t − T ), (25)
with c0 = (w − c)/w, c1 = −δ, and c2 = 1/w. We know that t − T ≥ τ3 andtherefore y(t − T ) ≥ c − w. It follows that
y(t) ≥w − c
w− δy(t) +
1
w(c − w) = −δy(t)
and therefore
y(t) ≥ exp(−δ(t − T − τ3))y(T + τ3). (26)
In particular, using (23) yields
y(T + τ4) ≥ exp(−δ(τ4 − τ3)) exp(−δτ3)c + w
w
(
w exp(−δT ) +1
δln
c2
c2 − w2
)
= exp(−δτ4)(c + w)
(
exp(−δT ) +1
δwln
c2
c2 − w2
)
.
Using the fact that τ4 ≤ T + τ1 yields
y(T + τ4) ≥ exp(−δ(T + τ1))(c + w)
(
exp(−δT ) +1
δwln
c2
c2 − w2
)
= exp(−δT )c
(
exp(−δT ) +1
δwln
c2
c2 − w2
)
,
and (10) implies that
y(T + τ4) > c exp(−2δT ) + c + w.
Hence,
y5(t) > c + w, for all t ∈ I5. (27)
19

We now derive an upper bound for y5(t). Since t − T ≤ τ4, y(t − T ) ≤ cand this yields
y(t) ≤w − c
w− δy(t) +
1
wc
= 1 − δy(t),
soy5(t) ≤ 1/δ + exp(−δ(t − T − τ3))(y(T + τ3) − 1/δ).
Using (23) and (11), we find that
y5(t) < 1/δ. (28)
We now analyze y5(t). It follows from (15) that
y(t−T ) =c + w
w
(
w exp(−δ(t − T )) +1
δ+
(
2T − t −1
δ
)
exp(−δ(t − 2T ))
)
,
and using (25) and Proposition 3 yields
y5(t) = r + exp(−δt)P (t),
where r is a constant, and P (t) is a quadratic polynomial. Hence,
y5(t) = exp(−δt)Q(t), (29)
where Q(t) is a quadratic polynomial.Using (25) and the definition of τ3 yields
y(T + τ3) < 0. (30)
Similarly, using (25), (28) and the definition of τ4 yields
y(T + τ4) = 1 − δy(T + τ4) > 0. (31)
It now follows from (29), (30) and (31) that there exists tm ∈ I5 suchthat y5(t) < 0 for all t ∈ [T + τ3, tm), y5(tm) = 0, and y5(t) > 0 forall t ∈ (tm, T + τ4]. Hence, y5(t) attains a unique minimum at time tm.Interval 6: I6 = [T + τ4, T + τ5].Here, c < y[t − T, t] < c + w so (6) yields
y(t) = c0 + c1y(t) + c2y(t − T ),
20

with c0 = (c+w)/w, c1 = −δ, and c2 = −1/w. We know that τ4 ≤ t−T ≤ τ5
and therefore c ≤ y(t − T ) ≤ c + w. It follows that
y(t) ≥c + w
w− δy(t) −
1
w(c + w)
= −δy(t),
so
y(t) ≥ exp(−δ(t − T − τ4))y(T + τ4).
In particular, using (26) yields
y(t) ≥ exp(−δ(t − T − τ4)) exp(−δ(τ4 − τ3))y(T + τ3)
≥ exp(−δ(t − T ))(c + w)
(
exp(−δT ) +1
δwln
c2
c2 − w2
)
,
and using the fact that t − T ≤ τ5 implies that
y(t) ≥ exp(−δτ5)(c + w)
(
exp(−δT ) +1
δwln
c2
c2 − w2
)
.
By definition, τ5 ≤ T + τ1 and therefore, as in the analysis in interval I5, wefind that
y6(t) > c + w, for all t ∈ I6. (32)
Arguing as in the analysis in interval I5, we find that there exists tm ∈ I6
such that y6(t) > 0 for all t ∈ [T + τ4, tm), y6(tm) = 0, and y6(t) < 0 forall t ∈ (tm, T + τ5]. Hence, y6(t) attains a unique maximum at t = tm.Interval 7: I7 = [T + τ5, 2T + τ5].Using (24), (27) and (32) yields y[t − T, t] ≥ c + w so
y7(t) = exp(−δ(t − T − τ5))y6(T + τ5). (33)
Thus, y7(t) is a strictly decreasing function. Note that (32) yields y6(T+τ5) >c + w. We now consider two possible cases.
Case 1: Suppose that there exists η ∈ I7 such that y7(η) = c + w. Inthis case, y[η − T, η) > c + w, so y(t) = y(t + η) for all t ∈ [0, T ]. Hence, thesolution from here on is periodic with period η.
21

Case 2: Suppose that there is no η ∈ I7 such that y7(η) = c + w. In thiscase, y(t) > c+w for all t ∈ I7. Defining I8 := [2T + τ5, 3T + τ5], we see that
y8(t) = exp(−δ(t − 2T − τ5))y7(2T + τ5),
so y(t) continues to decrease. If there is a point η ∈ I8 such that y8(η) = c+wthen, as in Case 1, we get that y(t) is periodic from here on. Otherwise, y(t)will continue to decrease exponentially in the next interval, and so on. Even-tually, there must be a time η such that y(η) = c + w and the solution willbe periodic from this point on.
References
[1] Y. Bar-Cohen and C. Breazeal, Eds., Biologically Inspired Intelligent Robots.SPIE Press, 2003.
[2] J. M. Benitez, J. L. Castro, and I. Requena, “Are artificial neural networksblack boxes?” IEEE Trans. Neural Networks, vol. 8, pp. 1156–1164, 1997.
[3] O. N. Bjornstad and B. T. Grenfell, “Noisy clockwork: time series analysis ofpopulation fluctuations in animals,” Science, vol. 293, pp. 638–643, 2001.
[4] D. R. Brillinger, J. Guckenheimer, P. Guttorp, and G. Oster, “Empirical mod-elling of population time series data: The case of age and density dependentvital rates,” Lectures on Mathematics in the Life Sciences, vol. 13, pp. 65–90,1980.
[5] C. Chang and P. Gaudiano, “Biomimetic robotics,” Robotics and Autonomous
Systems, vol. 30, no. 1, pp. 1–2, 2000.
[6] R. D. Driver, Ordinary and Delay Differential Equations, ser. Applied Math-ematical Sciences. Springer-Verlag, 1977, vol. 20.
[7] D. Dubois, H. T. Nguyen, H. Prade, and M. Sugeno, “Introduction: thereal contribution of fuzzy systems,” in Fuzzy Systems: Modeling and Control,H. T. Nguyen and M. Sugeno, Eds. Kluwer, 1998, pp. 1–17.
[8] G. S. Fraenkel and D. L. Gunn, The Orientation of Animals: Kineses, Taxes,
and Compass Reactions. Dover Publications, 1961.
[9] W. S. C. Gurney, S. P. Blythe, and R. M. Nisbet, “Nicholson’s blowfliesrevisited,” Nature, vol. 287, pp. 17–21, 1980.
22

[10] A. Hastings, C. L. Hom, S. Ellner, P. Turchin, and H. C. J. Godfray, “Chaosin ecology: is mother nature a strange attractor?” Annual Review of Ecology
and Systematics, vol. 24, pp. 1–33, 1993.
[11] B. E. Kendall, C. J. Briggs, W. W. Murdoch, P. Turchin, S. P. Ellner, E. Mc-Cauley, R. M. Nisbet, and S. N. Wood, “Why do populations cycle? a syn-thesis of statistical and mechanistic modeling approaches,” Ecology, vol. 80,pp. 1789–1805, 1999.
[12] M. Margaliot and G. Langholz, “Fuzzy Lyapunov based approach to the de-sign of fuzzy controllers,” Fuzzy Sets Systems, vol. 106, no. 1, pp. 49–59,1999.
[13] ——, New Approaches to Fuzzy Modeling and Control - Design and Analysis.World Scientific, 2000.
[14] C. Mattheck, Design in Nature: Learning from Trees. Springer-Verlag, 1998.
[15] L. D. Mueller, “Theoretical and empirical examination of density-dependentselection,” Annu. Rev. Ecol. Syst., vol. 28, pp. 269–288, 1997.
[16] A. J. Nicholson, “An outline of the dynamics of animal populations,” Aust.
J. Zool., vol. 2, pp. 9–65, 1954.
[17] ——, “The self-adjustment of populations to change,” Cold Spring Harbor
Symposium on Quantitative Biology, vol. 22, pp. 153–173, 1957.
[18] S.-I. Niculescu, E. I. Verriest, L. Dugard, and J.-M. Dion, “Stability androbust stability of time-delay systems: a guided tour,” in Stability and Con-
trol of Time-Delay Systems, ser. Lecture Notes in Control and InformationSciences, L. Dugard and E. I. Verriest, Eds. Springer, 1998, vol. 228, pp.1–71.
[19] E. Tron and M. Margaliot, “Mathematical modeling of observed natural be-havior: a fuzzy logic approach,” Fuzzy Sets Systems, vol. 146, pp. 437–450,2004.
[20] ——, “How does the Dendrocoleum lacteum orient to light? a fuzzy modelingapproach,” Fuzzy Sets Systems, vol. 155, pp. 236–251, 2005.
[21] S. N. Wood, “Partially specified ecological models,” Ecological Monographs,vol. 71, pp. 1–25, 2001.
[22] L. A. Zadeh, “Fuzzy logic = computing with words,” IEEE Trans. Fuzzy
Systems, vol. 4, no. 2, pp. 103–111, 1996.
23