-
CBMM Memo No. 058 April 29, 2019
Why and When Can Deep – but Not Shallow – Networks Avoid
theCurse of Dimensionality: a Review
by
Tomaso Poggio1 Hrushikesh Mhaskar2 Lorenzo Rosasco1 Brando
Miranda1 Qianli Liao1
1Center for Brains, Minds, and Machines, McGovern Institute for
Brain Research,Massachusetts Institute of Technology, Cambridge,
MA, 02139.
2Department of Mathematics, California Institute of Technology,
Pasadena, CA 91125;Institute of Mathematical Sciences, Claremont
Graduate University, Claremont, CA 91711
Abstract: The paper reviews and extends an emerging body of
theoretical results on deep learning including the conditions under
whichit can be exponentially better than shallow learning. A class
of deep convolutional networks represent an important special case
of theseconditions, though weight sharing is not the main reason
for their exponential advantage. Implications of a few key theorems
are discussed,together with new results, open problems and
conjectures.
This work was supported by the Center for Brains, Minds and
Machines (CBMM), fundedby NSF STC award CCF - 1231216. H.M. is
supported in part by ARO Grant W911NF-15-1-0385.
1
arX
iv:1
611.
0074
0v2
[cs
.LG
] 2
2 N
ov 2
016
-
Why and When Can Deep – but Not Shallow – Networks Avoid
theCurse of Dimensionality: a Review
Tomaso Poggio1 Hrushikesh Mhaskar2 Lorenzo Rosasco1 Brando
Miranda1 Qianli Liao11Center for Brains, Minds, and Machines,
McGovern Institute for Brain Research, Massachusetts Institute of
Technology, Cambridge, MA, 02139.
2Department of Mathematics, California Institute of Technology,
Pasadena, CA 91125; Institute of Mathematical Sciences, Claremont
Graduate University, Claremont, CA 91711
Abstract: The paper reviews and extends an emerging body of
theoretical results on deep learning including the conditions under
which it can be exponentially betterthan shallow learning. A class
of deep convolutional networks represent an important special case
of these conditions, though weight sharing is not the main reason
fortheir exponential advantage. Implications of a few key theorems
are discussed, together with new results, open problems and
conjectures.
Keywords: Deep and Shallow Networks, Convolutional Neural
Networks, Function Approximation, Deep Learning
1 A theory of deep learning
1.1 Introduction
There are at three main sets of theory questions about Deep
NeuralNetworks. The first set of questions is about the power of
the archi-tecture – which classes of functions can it approximate
and learnwell? The second set of questions is about the learning
process: whyis SGD (Stochastic Gradient Descent) so unreasonably
efficient, atleast in appearance? The third, more important
question is aboutgeneralization. Overparametrization may explain
why minima areeasy to find during training but then why does
overfitting seems tobe less of a problem than for classical shallow
networks? Is this be-cause deep networks are very efficient
algorithms for HierarchicalVector Quantization?
In this paper we focus especially on the first set of
ques-tions, summarizing several theorems that have appeared on-line
in 2015[Anselmi et al., 2015b, Poggio et al., 2015c, Poggio et al.,
2015a], and in2016[Mhaskar et al., 2016, Mhaskar and Poggio,
2016]). We then describe addi-tional results as well as a few
conjectures and open questions. Themain message is that deep
networks have the theoretical guarantee,which shallow networks do
not have, that they can avoid the curseof dimensionality for an
important class of problems, correspond-ing to compositional
functions, that is functions of functions. Anespecially interesting
subset of such compositional functions are hi-erarchically local
compositional functions where all the constituentfunctions are
local in the sense of bounded small dimensionality.The deep
networks that can approximate them without the curse
ofdimensionality are of the deep convolutional type (though
weightsharing is not necessary).
Implications of the theorems likely to be relevant in practice
are:
1. Cerrtain deep convolutional architectures have a
theoreticalguarantee that they can be much better than one layer
archi-tectures such as kernel machines;
2. the problems for which certain deep networks are guaran-teed
to avoid the curse of dimensionality correspond to input-output
mappings that are compositional. The most interestingset of
problems consists of compositional functions composedof a hierarchy
of constituent functions that are local: an exam-ple is f(x1, · · ·
, x8) = h3(h21(h11(x1, x2), h12(x3, x4)),h22(h13(x5, x6), h14(x7,
x8))). The compositional functionf requires only “local”
computations (here with just dimen-sion 2) in each of its
constituent functions h;
3. the key aspect of convolutional networks that can give theman
exponential advantage is not weight sharing but locality ateach
level of the hierarchy.
2 Previous theoretical work
Deep Learning references start with Hinton’s backpropagationand
with Lecun’s convolutional networks (see for a nice review[LeCun et
al., 2015]). Of course, multilayer convolutional networks havebeen
around at least as far back as the optical processing era ofthe
70s. The Neocognitron[Fukushima, 1980] was a convolutional neu-ral
network that was trained to recognize characters. The prop-erty of
compositionality was a main motivation for hierarchi-cal models of
visual cortex such as HMAX which can be re-garded as a pyramid of
AND and OR layers[Riesenhuber and Poggio, 1999],that is a sequence
of conjunctions and disjunctions. Several pa-pers in the ’80s
focused on the approximation power and learn-ing properties of
one-hidden layer networks (called shallow net-works here). Very
little appeared on multilayer networks, (but see[Mhaskar, 1993a,
Chui et al., 1994, Chui et al., 1996]), mainly because one
hiddenlayer nets performed empirically as well as deeper networks.
Onthe theory side, a review by Pinkus in 1999[Pinkus, 1999]
concludesthat “...there seems to be reason to conjecture that the
two hiddenlayer model may be significantly more promising than the
singlehidden layer model...”. A version of the questions about the
im-portance of hierarchies was asked in [Poggio and Smale, 2003] as
follows:“A comparison with real brains offers another, and probably
re-lated, challenge to learning theory. The “learning algorithms”
wehave described in this paper correspond to one-layer
architectures.Are hierarchical architectures with more layers
justifiable in termsof learning theory? It seems that the learning
theory of the typewe have outlined does not offer any general
argument in favorof hierarchical learning machines for regression
or classification.This is somewhat of a puzzle since the
organization of cortex –for instance visual cortex – is strongly
hierarchical. At the sametime, hierarchical learning systems show
superior performance inseveral engineering applications.” Because
of the great empiricalsuccess of deep learning over the last three
years, several papersaddressing the question of why hierarchies
have appeared. Sum-Product networks, which are equivalent to
polynomial networks(see [B. Moore and Poggio, 1998, Livni et al.,
2013]), are a simple case of a hi-erarchy that was
analyzed[Delalleau and Bengio, 2011] but did not
provideparticularly useful insights. Montufar and Bengio[Montufar
et al., 2014]showed that the number of linear regions that can be
synthesizedby a deep network with ReLU nonlinearities is much
larger thanby a shallow network. However, they did not study the
conditionsunder which this property yields better learning
performance. Infact we will show later that the power of a deep
network cannotbe exploited in general but for certain specific
classes of functions.Relevant to the present review is the work on
hierarchical quadraticnetworks[Livni et al., 2013], together with
function approximationresults[Mhaskar, 1993b, Pinkus, 1999]. Also
relevant is the conjecture byShashua (see [Cohen et al., 2015]) on
a connection between deep learn-ing networks and the hierarchical
Tucker representations of ten-sors. In fact, our theorems describe
formally the class of functions
-
for which the conjecture holds. This paper describes and
extendsresults presented in[Anselmi et al., 2014, Anselmi et al.,
2015a, Poggio et al., 2015b]
and in[Liao and Poggio, 2016, Mhaskar et al., 2016] which derive
new upperbounds for the approximation by deep networks of certain
impor-tant classes of functions which avoid the curse of
dimensionality.The upper bound for the approximation by shallow
networks of gen-eral functions was well known to be exponential. It
seems naturalto assume that, since there is no general way for
shallow networksto exploit a compositional prior, lower bounds for
the approxima-tion by shallow networks of compositional functions
should alsobe exponential. In fact, examples of specific functions
that cannotbe represented efficiently by shallow networks have been
givenvery recently by [Telgarsky, 2015] and [Safran and Shamir,
2016]. We providein theorem 5 another example of a class of
compositional functionsfor which there is a gap between shallow and
deep networks.
3 Function approximation by deep networks
In this section, we state theorems about the approximation
proper-ties of shallow and deep networks.
3.1 Degree of approximation
The general paradigm is as follows. We are interested in
determin-ing how complex a network ought to be to theoretically
guaranteeapproximation of an unknown target function f up to a
given accu-racy � > 0. To measure the accuracy, we need a norm ‖
· ‖ on somenormed linear space X. As we will see the norm used in
the resultsof this paper is the sup norm in keeping with the
standard choicein approximation theory. Notice, however, that from
the point ofview of machine learning, the relevant norm is the L2
norm. In thissense, several of our results are stronger than
needed. On the otherhand, our main results on compositionality
require the sup normin order to be independent from the unknown
distribution of theinputa data. This is important for machine
learning.
Let VN be the be set of all networks of a given kind with
complexityN which we take here to be the total number of units in
the network(e.g., all shallow networks with N units in the hidden
layer). Itis assumed that the class of networks with a higher
complexityinclude those with a lower complexity; i.e., VN ⊆ VN+1.
Thedegree of approximation is defined by
dist(f, VN ) = infP∈VN
‖f − P‖. (1)
For example, if dist(f, VN ) = O(N−γ) for some γ > 0, thena
network with complexity N = O(�−
1γ ) will be sufficient to
guarantee an approximation with accuracy at least �. Since f
isunknown, in order to obtain theoretically proved upper bounds,
weneed to make some assumptions on the class of functions fromwhich
the unknown target function is chosen. This a priori infor-mation
is codified by the statement that f ∈W for some subspaceW ⊆ X. This
subspace is usually a smoothness class characterizedby a smoothness
parameter m. Here it will be generalized to asmoothness and
compositional class, characterized by the parame-ters m and d (d =
2 in the example of Figure 1; in general is thesize of the kernel
in a convolutional network).
3.2 Shallow and deep networks
This section characterizes conditions under which deep
networksare “better” than shallow network in approximating
functions. Thuswe compare shallow (one-hidden layer) networks with
deep net-works as shown in Figure 1. Both types of networks use the
same
small set of operations – dot products, linear combinations, a
fixednonlinear function of one variable, possibly convolution and
pool-ing. Each node in the networks we consider usually corresponds
toa node in the graph of the function to be approximated, as shown
inthe Figure. In particular each node in the network contains a
certainnumber of units. A unit is a neuron which computes
(〈x,w〉+ b)+, (2)
where w is the vector of weights on the vector input x. Both t
andthe real number b are parameters tuned by learning. We assume
herethat each node in the networks computes the linear combination
ofr such units
r∑i=1
ci(〈x, ti〉+ bi)+ (3)
Notice that for our main example of a deep network
correspondingto a binary tree graph, the resulting architecture is
an idealizedversion of the plethora of deep convolutional neural
networks de-scribed in the literature. In particular, it has only
one output at thetop unlike most of the deep architectures with
many channels andmany top-level outputs. Correspondingly, each node
computes asingle value instead of multiple channels, using the
combinationof several units (see Equation 3). Our approach and
basic resultsapply rather directly to more complex networks (see
third note insection 7). A careful analysis and comparison with
simulations willbe described in future work.
The logic of our theorems is as follows.
• Both shallow (a) and deep (b) networks are universal, that
isthey can approximate arbitrarily well any continuous functionof n
variables on a compact domain. The result for shallownetworks is
classical. Since shallow networks can be viewedas a special case of
deep networks, it clear that for any contin-uous function of n
variables, there exists also a deep networkthat approximates the
function arbitrarily well on a compactdomain.
• We consider a special class of functions of n variables on
acompact domain that are a hierarchical compositions of
localfunctions such as
f(x1, · · · , x8) = h3(h21(h11(x1, x2), h12(x3, x4)),h22(h13(x5,
x6), h14(x7, x8))) (4)
The structure of the function in equation 4 is represented by
agraph of the binary tree type. This is the simplest example
ofcompositional functions, reflecting dimensionality d = 2 forthe
constituent functions h. In general, d is arbitrary but fixedand
independent of the dimensionality n of the compositionalfunction f
. In our results we will often think of n increasingwhile d is
fixed. In section 4 we will consider the more generalcompositional
case.
• The approximation of functions with a compositional struc-ture
– can be achieved with the same degree of accuracy bydeep and
shallow networks but that the number of parametersare much smaller
for the deep networks than for the shallownetwork with equivalent
approximation accuracy. It is intu-itive that a hierarchical
network matching the structure of acompositional function should be
“better” at approximatingit than a generic shallow network but
universality of shallownetworks asks for non-obvious
characterization of “better”.Our result makes clear that the
intuition is indeed correct.
-
x1 x2 x3 x4 x5 x6 x7 x8
a b c
….∑
x1 x2 x3 x4 x5 x6 x7 x8
….….
…....... ... ...
∑
...
...
...
∑
x1 x2 x3 x4 x5 x6 x7 x8x1 x2 x3 x4 x5 x6 x7 x8
x1 x2 x3 x4 x5 x6 x7 x8 x1 x2 x3 x4 x5 x6 x7 x8
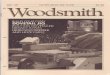
Figure 1 The top graphs are associated to functions; each of the
bottom diagrams depicts the network approximating the function
above. In a) a shallow universalnetwork in 8 variables and N units
approximates a generic function of 8 variables f(x1, · · · , x8).
Inset b) shows a binary tree hierarchical network at the bottomin n
= 8 variables, which approximates well functions of the form f(x1,
· · · , x8) = h3(h21(h11(x1, x2), h12(x3, x4)), h22(h13(x5, x6),
h14(x7, x8))) asrepresented by the binary graph above. In the
approximating network each of the n− 1 nodes in the graph of the
function corresponds to a set of Q = N
n−1 ReLU
units computing the ridge function∑Qi=1 ai(〈vi,x〉+ ti)+, with
vi,x ∈ R2, ai, ti ∈ R. Each term in the ridge function corresponds
to a unit in the node (this is
somewhat different from todays deep networks, see text and note
in 7). In a binary tree with n inputs, there are log2n levels and a
total of n− 1 nodes. Similar tothe shallow network, a hierarchical
network is universal, that is, it can approximate any continuous
function; the text proves that it can approximate a
compositionalfunctions exponentially better than a shallow network.
No invariance – that is weight sharing – is assumed here. Notice
that the key property that makes convolutionaldeep nets
exponentially better than shallow for compositional functions is
the locality of the constituent functions – that is their low
dimensionality. Weight sharingcorresponds to all constituent
functions at one level to be the same (h11 = h12 etc.). Inset c)
shows a different mechanism that can be exploited by the deep
network atthe bottom to reduce the curse of dimensionality in the
compositional function at the top: leveraging different degrees of
smoothness of the constituent functions, seeTheorem 6 in the text.
Notice that in c) the input dimensionality must be≥ 2 in order for
deep nets to have an advantage over shallow nets. The simplest
examples offunctions to be considered for a), b) and c) are
functions that are polynomials with a structure corresponding to
the graph at the top.
-
We assume that the shallow networks do not have any
structuralinformation on the function to be learned (here its
compositionalstructure), because they cannot represent it directly.
In any case,we will describe lower bounds of approximation by
shallow net-works for the class of compositional functions to
formalize thatassumption. Deep networks with standard architectures
on the otherhand do represent compositionality in their
architecture and can beadapted to the details of such prior
information.
We approximate functions of n variables of the form of
Equation(4) with networks in which the activation nonlinearity is a
smoothedversion of the so called ReLU, originally called ramp by
Breimanand given by σ(x) = x+ = max(0, x) . The architecture of
thedeep networks reflects Equation (4) with each node hi being a
ridgefunction, comprising one or more neurons.
Let In = [−1, 1]n, X = C(In) be the space of all
continuousfunctions on In, with ‖f‖ = maxx∈In |f(x)|. Let SN,n
denotethe class of all shallow networks with N units of the
form
x 7→N∑k=1
akσ(〈wk, x〉+ bk),
where wk ∈ Rn, bk, ak ∈ R. The number of trainable
parametershere is (n+2)N ∼ n. Letm ≥ 1 be an integer, andWnm be the
setof all functions of n variables with continuous partial
derivativesof orders up to m
-
� = cN−m/2. Our assumption that f ∈WN,2m implies that each
ofthese constituent functions is Lipschitz continuous. Hence, it is
easyto deduce that, for example, if P , P1, P2 are approximations
to theconstituent functions h, h1, h2, respectively within an
accuracy of�, then since ‖h − P‖ ≤ �, ‖h1 − P1‖ ≤ � and ‖h2 − P2‖ ≤
�,then ‖h(h1, h2) − P (P1, P2)‖ = ‖h(h1, h2) − h(P1, P2) +h(P1, P2)
− P (P1, P2)‖ ≤ ‖h(h1, h2) − h(P1, P2)‖ +‖h(P1, P2)− P (P1, P2)‖ ≤
c� by Minkowski inequality. Thus
‖h(h1, h2)− P (P1, P2)‖ ≤ c�,
for some constant c > 0 independent of the functions
involved.This, together with the fact that there are (n− 1) nodes,
leads to(6). �
Also in this case the proof provides the following corollary
aboutthe subset Tnk of the space P
nk which consists of compositional
polynomials with a binary tree graph and constituent
polynomialfunctions of degree h (in 2 variables)
Corollary 2. Let σ : R → R be infinitely differentiable, and
nota polynomial. Let n = 2l. Then f ∈ Tnk can be realized by adeep
network with a binary tree graph and a total of r units withr = (n−
1)
(2+k2
)≈ (n− 1)k2.
It is important to emphasize that the assumptions on σ in the
the-orems are not satisfied by the ReLU function x 7→ x+, but
theyare satisfied by smoothing the function in an arbitrarily small
inter-val around the origin. This suggests that the result of the
theoremshould be valid also for the non-smooth ReLU. Section 4.1
pro-vides formal results. Stronger results than the theorems of
thissection (see [Mhaskar and Poggio, 2016]) hold for networks
where eachunit evaluates a Gaussian non–linearity; i.e., Gaussian
networks ofthe form
G(x) =
N∑k=1
ak exp(−|x− wk|2), x ∈ Rd (7)
where the approximation is on the entire Euclidean space.
In summary, when the only a priori assumption on the target
func-tion is about the number of derivatives, then to guarantee an
ac-curacy of �, we need a shallow network with O(�−n/m)
trainableparameters. If we assume a hierarchical structure on the
target func-tion as in Theorem 2, then the corresponding deep
network yieldsa guaranteed accuracy of � with O(�−2/m) trainable
parameters.Note that Theorem 2 applies to all f with a
compositional archi-tecture given by a graph which correspond to,
or is a subgraph of,the graph associated with the deep network – in
this case the graphcorresponding to Wn,dm . Theorem 2 lead
naturally to the notion ofeffective dimensionality that we
formalize in the next section
Definition 1. The effective dimension of a class W of
functions(for a given norm) is said to be d if for every � > 0,
any function inW can be recovered within an accuracy of � (as
measured by thenorm) using an appropriate network (either shallow
or deep) with�−d parameters.
Thus, the effective dimension for the class Wnm is n/m, that
ofWn,2m is 2/m.
4 General compositionality results: functionscomposed by a
hierarchy of functions withbounded effective dimensionality
The main class of functions we considered in previous papers
con-sists of functions as in Figure 1 b that we called
compositionalfunctions. The term “compositionality” was used with
the meaningit has in language and vision, where higher level
concepts are com-posed of a small number of lower level ones,
objects are composedof parts, sentences are composed of words and
words are composedof syllables. Notice that this meaning of
compositionality is nar-rower than the mathematical meaning of
composition of functions.The compositional functions we have
described in previous papersmay be more precisely called functions
composed of hierarchicallylocal functions.
Here we generalize formally our previous results to the
broaderclass of compositional functions (beyond the hierarchical
localityof Figure 1b to Figure 1c and Figure 2) by restating
formally a fewcomments of previous papers. Let begin with one of
the previousexamples. Consider
Q(x, y) = (Ax2y2 +Bx2y
+Cxy2 +Dx2 + 2Exy
+Fy2 + 2Gx+ 2Hy + I)210
.
Since Q is nominally a polynomial of coordinatewise degree
211,[Mhaskar, 1996, Lemma 3.2] shows that a shallow network with
211 + 1units is able to approximate Q arbitrarily well on I2.
However,because of the hierarchical structure of Q, [Mhaskar, 1996,
Lemma 3.2]shows also that a hierarchical network with 9 units can
approxi-mate the quadratic expression, and 10 further layers, each
with 3units can approximate the successive powers. Thus, a
hierarchicalnetwork with 11 layers and 39 units can approximate Q
arbitrarilywell. We note that even if Q is nominally of degree 211,
each ofthe monomial coefficients in Q is a function of only 9
variables,A, · · · , I .
A different example is
Q(x, y) = |x2 − y2|. (8)
This is obviously a Lipschitz continuous function of 2
variables.The effective dimension of this class is 2, and hence, a
shallownetwork would require at least c�−2 parameters to
approximate itwithin �. However, the effective dimension of the
class of univariateLipschitz continuous functions is 1. Hence, if
we take into accountthe fact that Q is a composition of a
polynomial of degree 2 in 2variables and the univariate Lipschitz
continuous function t 7→ |t|,then it is easy to see that the same
approximation can be achievedby using a two layered network with
O(�−1) parameters.
To formulate our most general result that includes the
examplesabove as well as the constraint of hierarchical locality,
we firstdefine formally a compositional function in terms of a
directedacyclic graph. Let G be a directed acyclic graph (DAG),
with theset of nodes V . A G–function is defined as follows. Each
of thesource node obtains an input from R. Each in-edge of every
othernode represents an input real variable, and the node itself
representsa function of these input real variables, called a
constituent function.The out-edges fan out the result of this
evaluation. We assume thatthere is only one sink node, whose output
is the G-function. Thus,ignoring the compositionality of this
function, it is a function of nvariables, where n is the number of
source nodes in G.
-
x1 x2 x3 x4 x5 x6 x7 x8
+
x1 x2 x3 x4 x5 x6 x7 x8
+
x1 x2 x3 x4 x5 x6 x7 x8
+
x1 x2 x3 x4 x5 x6 x7 x8
Figure 2 The figure shows the graphs of functions that may have
small effectivedimensionality, depending on the number of units per
node required for goodapproximation.
Theorem 3. Let G be a DAG,n be the number of source nodes,and
for each v ∈ V , let dv be the number of in-edges of v. Letf : Rn
7→ R be a compositional G-function, where each of the con-stitutent
function is in W dvmv . Consider shallow and deep networkswith
infinitely smooth activation function as in Theorem 1. Thendeep
networks – with an associated graph that corresponds to thegraph of
f – avoid the curse of dimensionality in approximating ffor
increasing n, whereas shallow networks cannot directly avoidthe
curse. In particular, the complexity of the best
approximatingshallow network is exponential in n
Ns = O(�−nm ), (9)
where m = minv∈V mv , while the complexity of the deep
networkis
Nd = O(∑v∈V
�−dv/mv ). (10)
Following definition 1 we call dv/mv the effective dimension
offunction v. Then, deep networks can avoid the curse of
dimen-sionality if the constituent functions of a compositional
functionhave a small effective dimension; i.e., have fixed, “small”
dimen-sionality or fixed, “small” “roughness. A different
interpretation ofTheorem 3 is the following.
Proposition 1. If a family of functions f : Rn 7→ R of
smooth-ness m has an effective dimension < n/m, then the
functionsare compositional in a manner consistent with the
estimates inTheorem 3.
Notice that the functions included in this theorem are
functionsthat are either local or the composition of simpler
functions or both.Figure 2 shows some examples in addition to the
examples at thetop of Figure Figure 1.
4.1 Approximation results for shallow and deep net-works with
(non-smooth) ReLUs
The results we described so far use smooth activation functions.
Wealready mentioned why relaxing the smoothness assumption
shouldnot change our results in a fundamental way. While studies on
theproperties of neural networks with smooth activation abound,
theresults on non-smooth activation functions are much more
sparse.Here we briefly recall some of them.
In the case of shallow networks, the condition of a smooth
acti-vation function can be relaxed to prove density (see [Pinkus,
1999],Proposition 3.7):
Proposition 2. Let σ =: R→ R be in C0, and not a polynomial.Then
shallow networks are dense in C0.
In particular, ridge functions using ReLUs of the form∑ri=1
ci(〈wi, x〉+ bi)+, with wi, x ∈ R
2, ci, bi ∈ R are dense inC.
Networks with non-smooth activation functions are expected todo
relatively poorly in approximating smooth functions such
aspolynomials in the sup norm. “Good” degree of approximationrates
(modulo a constant) have been proved in the L2 norm. De-fine B the
unit ball in Rn. Call Cm(Bn) the set of all continuousfunctions
with continuous derivative up to degree m defined onthe unit ball.
We define the Sobolev space Wmp as the comple-tion of Cm(Bn) with
respect to the Sobolev norm p (see for de-tails [Pinkus, 1999] page
168). We define the space Bmp = {f : f ∈Wmp , ‖f‖m,p ≤ 1} and the
approximation errorE(Bm2 ;H;L2) =supf∈Bm2
= E(f ;H;L2) = infg∈H ‖f − g‖L2 . It is shown in[Pinkus, 1999,
Corollary 6.10] that
Proposition 3. ForMr : f(x) =∑ri=1 ci(〈wi, x〉+bi)+ it holds
E(Bm2 ;Mr;L2) ≤ Cr−mn for m = 1, · · · , n+3
2.
These approximation results with respect to the L2 norm cannotbe
applied to derive bounds for compositional networks. Indeed,in the
latter case, as we remarked already, estimates in the uni-form norm
are needed to control the propagation of the errorsfrom one layer
to the next, see Theorem 2. Results in this direc-tion are given in
[Mhaskar, 2004], and more recently in [Bach, 2014] and[Mhaskar and
Poggio, 2016] (see Theorem 3.1). In particular, using a resultin
[Bach, 2014] and following the proof strategy of Theorem 2 it
ispossible to derive the following results on the approximation of
Lip-shitz continuous functions with deep and shallow ReLU
networksthat mimics our Theorem 2:
Theorem 4. Let f be a L-Lipshitz continuous function of n
vari-ables. Then, the complexity of a network which is a linear
combi-nation of ReLU providing an approximation with accuracy at
least� is
Ns = O(( �
L
)−n),
wheres that of a deep compositional architecture is
Nd = O((
n− 1)( �L
)−2).
Our general Theorem 3 can be extended in a similar way. Theorem4
is an example of how the analysis of smooth activation functionscan
be adapted to ReLU. Indeed, it shows how deep compositionalnetworks
with standard ReLUs can avoid the curse of dimension-ality. In the
above results, the regularity of the function class isquantified by
the magnitude of Lipshitz constant. Whether the latteris best
notion of smoothness for ReLU based networks, and if theabove
estimates can be improved, are interesting questions thatwe defer
to a future work. A result that is more intuitive and mayreflect
what networks actually do is described in Appendix 4.3.
Theconstruction described there, however, provides approximation
inthe L2 norm but not in the sup norm though this may not matter
fordigital implementations.
Figures 3, 4, 5, 6 provide a sanity check and empirical support
forour main results and for the claims in the introduction.
4.2 Lower bounds and gaps
So far we have shown that there are deep networks – for instance
ofthe convolutional type – that can avoid the curse of
dimensionalitywhen learning functions blessed with
compositionality. There areno similar guarantee for shallow
networks: in fact for shallownetworks approximating generic
continuous functions the lowerand the upper bound are both
exponential[Pinkus, 1999].
-
Figure 4 An empirical comparison of shallow vs 2-layers binary
tree networks in the approximation of compositional functions. The
loss function is the standardmean square error (MSE). There are
several units per node of the tree. In our setup here the network
with an associated binary tree graph was set up so that each
layerhad the same number of units and shared parameters. The number
of units for the shallow and binary tree neural networks had the
same number of parameters. Onthe left the function is composed of a
single ReLU per node and is approximated by a network using ReLU
activations. On the right the compositional function isf(x1, x2,
x3, x4) = h2(h11(x1, x2), h12(x3, x4)) and is approximated by a
network with a smooth ReLU activation (also called softplus). The
functions h1, h2,h3 are as described in Figure 3. In order to be
close to the function approximation case, a large data set of 60K
training examples was used for both training sets. Weused for SGD
the Adam[Kingma and Ba, 2014] optimizer. In order to get the best
possible solution we ran 200 independent hyper parameter searches
using random search[Bergstra and Bengio, 2012] and reported the one
with the lowest training error. The hyper parameters search was
over the step size, the decay rate, frequency of decay andthe
mini-batch size. The exponential decay hyper parameters for Adam
were fixed to the recommended values according to the original
paper [Kingma and Ba, 2014]. Theimplementations were based on
TensorFlow [Abadi et al., 2015].
Figure 5 Another comparison of shallow vs 2-layers binary tree
networks in the learning of compositional functions. The set up of
the experiment was the same as in theone in figure 4 except that
the compositional function had two ReLU units per node instead of
only one. The right part of the figure shows a cross section of the
functionf(x1, x2, 0.5, 0.25) in a bounded interval x1 ∈ [−1, 1], x2
∈ [−1, 1]. The shape of the function is piece wise linear as it is
always the case for ReLUs networks.
-
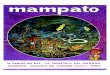
0 10 20 30 40 50 60
Epoch
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
Tra
inin
g e
rro
r o
n C
IFA
R-1
0
ShallowFC, 2 Layers, #Params 1577984
DeepFC, 5 Layers, #Params 2364416
DeepConv, No Sharing, #Params 563888
DeepConv, Sharing, #Params 98480
0 10 20 30 40 50 60
Epoch
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
Va
lida
tio
n e
rro
r o
n C
IFA
R-1
0
ShallowFC, 2 Layers, #Params 1577984
DeepFC, 5 Layers, #Params 2364416
DeepConv, No Sharing, #Params 563888
DeepConv, Sharing, #Params 98480
Figure 6 We show that the main advantage of deep Convolutional
Networks (ConvNets) comes from "hierarchical locality" instead of
weight sharing. We train two5-layer ConvNets with and without
weight sharing on CIFAR-10. ConvNet without weight sharing has
different filter parameters at each spatial location. There are
4convolutional layers (filter size 3x3, stride 2) in each network.
The number of feature maps (i.e., channels) are 16, 32, 64 and 128
respectively. There is an additionalfully-connected layer as a
classifier. The performances of a 2-layer and 5-layer
fully-connected networks are also shown for comparison. Each hidden
layer of thefully-connected network has 512 units. The models are
all trained for 60 epochs with cross-entropy loss and standard
shift and mirror flip data augmentation (duringtraining). The
training errors are higher than those of validation because of data
augmentation. The learning rates are 0.1 for epoch 1 to 40, 0.01
for epoch 41 to 50 and0.001 for rest epochs. The number of
parameters for each model are indicated in the legends. Models with
hierarchical locality significantly outperform shallow
andhierarchical non-local networks.
Figure 3 The figure shows on the top the graph of the function
to be approxi-mated, while the bottom part of the figure shows a
deep neural network with thesame graph structure. The left and
right node inf the first layer has each n unitsgiving a total of 2n
units in the first layer. The second layer has a total of 2nunits.
The first layer has a convolution of size n to mirror the structure
of thefunction to be learned. The compositional function we
approximate has the formf(x1, x2, x3, x4) = h2(h11(x1, x2), h12(x3,
x4)) with h11, h12 and h2as indicated in the figure.
It seems obvious that shallow networks, unlike deep ones,
cannotexploit in their architecture compositional priors
corresponding tocompositional functions. In past papers we listed a
few examples:
• Consider the polynomial
Q(x1, x2, x3, x4) = (Q1(Q2(x1, x2), Q3(x3, x4)))1024,
where Q1, Q2, Q3 are bivariate polynomials of total degree≤ 2.
Nominally, Q is a polynomial of total degree 4096in 4 variables,
and hence, requires
(41004
)≈ (1.17) ∗ 1013
parameters without any prior knowledge of the
compositionalstructure. However, the compositional structure
implies thateach of these coefficients is a function of only 18
parameters.In this case, the representation which makes deep
networksapproximate the function with a smaller number of
parametersthan shallow networks is based on polynomial
approximationof functions of the type g(g(g())).
• As a different example, we consider a function which is
alinear combination of n tensor product Chui–Wang splinewavelets,
where each wavelet is a tensor product cubic spline.It is shown in
[Chui et al., 1994, Chui et al., 1996] that is impossible
toimplement such a function using a shallow neural networkwith a
sigmoidal activation function using O(n) neurons, buta deep network
with the activation function (x+)2 can do so.In this case there is
a formal proof of a gap between deep andshallow networks.
Similarly, Eldan and Shamir (2015) showseparations which are
exponential in the input dimension.
• As we mentioned earlier, Telgarsky proves an exponentialgap
between certain functions produced by deep networksand their
approximation by shallow networks. The theorem[Telgarsky, 2015] can
be summarized as saying that a certain fam-ily of classification
problems with real-valued inputs cannotbe approximated well by
shallow networks with fewer than ex-ponentially many nodes whereas
a deep network achieves zero
-
error. This corresponds to high-frequency, sparse trigonomet-ric
polynomials in our case. His upper bound can be proveddirectly from
our main theorem by considering the real-valuedpolynomials
x1x2...xd defined on the cube (−1, 1)d which isobviously a
compositional function with a binary tree graph.
• We exhibit here another example of a compositional
functionthat can be approximated well by deep networks but not
byshallow networks.Let n ≥ 2 be an integer, B ⊂ Rn be the unit ball
of Rn.We consider the class W of all compositional functions f =f2
◦ f1, where f1 : Rn → R, and
∑|k|≤4 ‖D
kf1‖∞ ≤ 1,f2 : R→ R and ‖D4f2‖∞ ≤ 1. We consider
∆(AN ) := supf∈W
infP∈AN
‖f − P‖∞,B ,
whereAN is either the class SN of all shallow networks withN
units or DN of deep networks with two layers, the firstwith n
inputs, and the next with one input. The both cases,the activation
function is a C∞ function σ : R → R that isnot a polynomial.
Theorem 5. There exist constants c1, c2 > 0 such that forN ≥
c1,
∆(SN ) ≥ c2, (11)In contrast, there exists c3 > 0 such
that
∆(DN ) ≤ c3N−4/n. (12)
The constants c1, c2, c3 may depend upon n.
PROOF. The estimate (12) follows from the estimates alreadygiven
for deep networks. In the remainder of this proof, c willdenote a
generic positive constant depending upon n alone,but its value may
be different at different occurrences. Toprove (11), we use Lemma
3.2 in [Chui et al., 1996]. Let φ be aC∞ function supported on [0,
1], and we consider fN (x) =φ(|4Nx|2). I note that ‖fN‖1 ≥ C, with
C independent ofN . Then it is clear that each fN ∈ W , and ‖fN‖1 ≥
c.Clearly,
∆(SN ) ≥ c infP∈SN
∫B
|fN (x)− P (x)|dx. (13)
We choose P ∗(x) =∑Nk=1 σ(〈w
∗k, x〉+ b∗k) such that
infP∈SN
∫B
|fN (x)−P (x)|dx ≥ (1/2)∫B
|fN (x)−P ∗(x)|dx.
(14)Since fN is supported on {x ∈ Rn : |x| ≤ 4−N}, we mayuse
Lemma 3.2 in [Chui et al., 1996] with g∗k(t) = σ(t + b
∗k) to
conclude that
∫B
|fN (x)− P (x)| dx ≥ infgk∈L1loc, wk∈R
n, ak∈R∫B
|fN (x)−∑
akgk(〈wk, x〉)|dx ≥ c.
Together with (13) and (14), this implies (11).
So plenty of examples of lower bounds exist showing a gap
betweenshallow and deep networks. A particularly interesting case
is theproduct function, that is the monomial f(x1, · · · , xn) = x1
×x2 × · · · × xn which is, from our point of view, the
prototypicalcompositional functions. Keeping in mind the question
of lowerbounds the question here is: what is the minimum integer
r(n) such
that the function f is in the closure of the span of σ(〈wk, x〉+
bk),k = 1, · · · , r(n), and wk, bk ranging over their whole
domains.Such a proof has been published for the case of smooth
ReLUs,using unusual group techniques and is sketched in the
Appendix of[Lin, 2016] yielding:
Proposition 4. For shallow networks approximating the
productmonomial f(x1, · · · , xn) = x1 × x2 × · · · × xn the
minimuminteger r(n) is r(n) = O(2n).
Notice, in support of the claim, that assuming that a shallow
net-work with (non-smooth) ReLUs has a lower bound of r(q) =
O(q)will lead to a contradiction with Hastad theorem by restricting
xifrom xi ∈ (−1, 1) to xi ∈ {−1,+1}. Hastad theorem [Hastad,
1987]establishes the inapproximability of the parity function by
shallowcircuits of non-exponential size. We conjecture that Hastad
theo-rem can be used directly to prove Proposition 4 by expressing
theproduct function in terms of the binary representation of the xi
andthen representing the resulting function in terms of the parity
basis.The upper bound for approximation by deep networks of
ReLUscan be obtained following the arguments of Proposition 7 in
theAppendix.
4.3 Messy graphs and densely connected deep net-works
As mentioned already, the approximating deep network does
notneed to exactly match the architecture of the compositional
functionas long as the graph or tree associated with the function
is containedin the graph associated with the network. This is of
course goodnews: the compositionality prior embedded in the
architecture ofthe network does not to reflect exactly the graph of
a new functionto be learned. We have shown that for a given class
of composi-tional functions characterized by an associated graph
there exista deep network that approximates such a function better
than ashallow network. The same network approximates well
functionscharacterized by subgraphs of the original class.
The proofs of our theorems show that linear combinations of
com-positional functions are universal in the sense that they can
ap-proximate any function and that deep networks with a number
ofunits that increases exponentially with layers can approximate
anyfunction. Notice that deep compositional networks can
interpolateif they are overparametrized with respect to the data,
even if thedata reflect a non-compositional function (see
Proposition 8 in theAppendix).
As an aside, note that the simplest compositional function –
addition– is trivial in the sense that it offers no approximation
advantage todeep networks. The key function is multiplication which
is for usthe prototypical compositional functions. As a
consequence, poly-nomial functions are compositional – they are
linear combinationsof monomials which are compositional.
As we mentioned earlier, networks corresponding to graphs
thatinclude the graph of the function to be learned can exploit
com-positionality. The bounds, however, will depend on the numberof
parameters r in the network used and not the parameters r∗(r∗ <
r) of the optimal deep network with a graph exactly matchedto the
graph of the function to be learned. As an aside, the price tobe
paid in using a non-optimal prior depend on the learning
algo-rithm. For instance, under sparsity constraints it may be
possible topay a smaller price than r (but higher than r∗).
In this sense, some of the densely connected deep networks
usedin practice – which contain sparse graphs that may be relevant
forthe function to be learned and are still “smaller” than the
exponen-tial number of units required to represent a generic
function of n
-
variables – are capable of exploiting some of the
compositionalitystructure.
5 Connections with the theory of Booleanfunctions
The approach followed in our main theorems suggest the
follow-ing considerations (see Appendix 1 for a brief
introduction). Thestructure of a deep network is reflected in
polynomials that are bestapproximated by it – for instance generic
polynomials or sparsepolynomials (in the coefficients) in d
variables of order k. The treestructure of the nodes of a deep
network reflects the structure of aspecific sparse polynomial.
Generic polynomial of degree k in dvariables are difficult to learn
because the number of terms, train-able parameters and associated
VC-dimension are all exponentialin d. On the other hand, functions
approximated well by sparsepolynomials can be learned efficiently
by deep networks with a treestructure that matches the polynomial.
We recall that in a similarway several properties of certain
Boolean functions can be “readout” from the terms of their Fourier
expansion corresponding to“large” coefficients, that is from a
polynomial that approximateswell the function.
Classical results [Hastad, 1987] about the depth-breadth
tradeoff incircuits design show that deep circuits are more
efficient in rep-resenting certain Boolean functions than shallow
circuits. Hastadproved that highly-variable functions (in the sense
of having highfrequencies in their Fourier spectrum), in particular
the parity func-tion cannot even be decently approximated by small
constant depthcircuits (see also [Linial et al., 1993]). A closely
related result follow im-mediately from our main theorem since
functions of real variablesof the form x1x2...xd have the
compositional form of the binarytree (for d even). Restricting the
values of the variables to −1,+1yields an upper bound:
Proposition 5. The family of parity functions x1x2...xd withxi ∈
{−1,+1} and i = 1, · · · , xd can be represented with
expo-nentially fewer units by a deep than a shallow network.
Notice that Hastad’s results on Boolean functions have been
oftenquoted in support of the claim that deep neural networks can
repre-sent functions that shallow networks cannot. For instance
Bengioand LeCun [Bengio and LeCun, 2007] write “We claim that most
functionsthat can be represented compactly by deep architectures
cannot berepresented by a compact shallow architecture”.”.
Finally, we want to mention a few other observations on
Booleanfunctions that shows an interesting connection with our
approach.It is known that within Boolean functions the AC0 class of
poly-nomial size constant depth circuits is characterized by
Fouriertransforms where most of the power spectrum is in the low
ordercoefficients. Such functions can be approximated well by a
poly-nomial of low degree and can be learned well by considering
onlysuch coefficients. There are two algorithms [Mansour, 1994]
that allowlearning of certain Boolean function classes:
1. the low order algorithm that approximates functions by
con-sidering their low order Fourier coefficients and
2. the sparse algorithm which learns a function by
approximat-ing its significant coefficients.
Decision lists and decision trees can be learned by the first
algo-rithm. Functions with small L1 norm can be approximated wellby
the second algorithm. Boolean circuits expressing DNFs can
beapproximated by the first one but even better by the second. In
fact,
in many cases a function can be approximated by a small set
ofcoefficients but these coefficients do not correspond to
low-orderterms. All these cases are consistent with the notes about
sparsefunctions in section 7.
6 Generalization bounds
Our estimate of the number of units and parameters needed for
adeep network to approximate compositional functions with an
error�G allow the use of one of several available bounds for the
general-ization error of the network to derive sample complexity
bounds. Asan example consider theorem 16.2 in [Anthony and
Bartlett, 2002] whichprovides the following sample bound for a
generalization error �Gwith probability at least 1 − δ in a network
in which the W pa-rameters (weights and biases) which are supposed
to minimize theempirical error (the theorem is stated in the
standard ERM setup)are expressed in terms of k bits:
M(�G, δ) ≤2
�2G(kW log 2 + log(
2
δ)) (15)
This suggests the following comparison between shallow and
deepcompositional (here binary tree-like networks). Assume a
networksize that ensure the same approximation error � .
Then in order to achieve the same generalization error �G,
thesample size Mshallow of the shallow network must be much
largerthan the sample size Mdeep of the deep network:
MdeepMshallow
≈ �n. (16)
This implies that for largish n there is a (large) range of
trainingset sizes between Mdeep and Mshallow for which deep
networkswill not overfit (corresponding to small �G) but shallow
networkswill (for dimensionality n ≈ 104 and � ≈ 0.1 Equation 16
yieldsmshallow ≈ 1010
4
mdeep).
A similar comparison is derived if one considers the best
possibleexpected error obtained by a deep and a shallow network.
Suchan error is obtained finding the architecture with the best
trade-offbetween the approximation and the estimation error. The
latter isessentially of the same order as the generalization bound
impliedby inequality (15), and is essentially the same for deep and
shallownetworks, that is
rn√M,
where we denoted by M the number of samples. For shallow
net-works, the number of parameters corresponds to r units of n
di-mensional vectors (plus off-sets), whereas for deep
compositionalnetworks the number of parameters correspond to r
units of 2 di-mensional vectors (plus off-sets) in each of the n −
1 units. Thenumber of units giving the best
approximation/estimation trade-offis
rshallow ≈(√
M
n
) nm+n
and rdeep ≈(√
M) 2m+2
for shallow and deep networks, respectively. The
corresponding(excess) expected errors E are
Edeep ≈(
n√M
) mm+n
-
for shallow networks and
Eshallow ≈ n(
1√M
) mm+2
for deep networks. For the expected error, as for the
generalizationerror, deep networks appear to achieve an exponential
gain. Theabove observations hold under the assumption that the
optimizationprocess during training finds the optimum parameters
values forboth deep and shallow networks. Taking into account
optimization,e.g. by stochastic gradient descent, requires
considering a furthererror term, but we expect that the overall
conclusions about gener-alization properties for deep vs. shallow
networks should still holdtrue.
Notice that independently of considerations of generalization,
deepcompositional networks are expected to be very efficient
memo-ries – in the spirit of hierarchical vector quantization – for
as-sociative memories reflecting compositional rules (see Appendix5
and [Anselmi et al., 2015c]). Notice that the advantage with
respectto shallow networks from the point of view of memory
capacitycan be exponential (as in the example after Equation 16
showingmshallow ≈ 1010
4
mdeep).
6.1 Generalization in multi-class deep networks
Most of the succesfull neural networks exploit composi-tionality
for better generalization in an additional impor-tant way (see
[Lake et al., 2015]). . Suppose that the mappingsto be learned in a
family of classification tasks (for in-stance classification of
different object classes in Ima-genet) may be approximated by
compositional functions suchas f(x1, · · · , xn) = hl · · ·
(h21(h11(x1, x2), h12(x3, x4)),h22(h13(x5, x6), h14(x7, x8) · · ·
)) · · · ), where hl depends on thetask (for instance to which
object class) but all the other constituentfunctions h are common
across the tasks. Under such an assump-tion, multi-task learning,
that is training simultaneously for thedifferent tasks, forces the
deep network to “find” common con-stituent functions. Multi-task
learning has theoretical advantagesthat depends on
compositionality: the sample complexity of theproblem can be
significantly lower (see [Maurer, 2015]). The Maurer’sapproach is
in fact to consider the overall function as the composi-tion of a
preprocessor function common to all task followed by atask-specific
function
7 Notes on a theory of compositional compu-tation
The key property of the theory of compositional functions
sketchedhere is that certain deep networks can learn them avoiding
the curseof dimensionality because of the blessing of
compositionality via asmall effective dimension.
We state here informally several comments and conjectures.
1. General comments
• The estimates on the n–width imply that there is somefunction
in either Wnm (theorem 1) or Wn,2m (theorem2) for which the
approximation cannot be better thanthat suggested by the theorems.
This is of the coursethe guarantee we want.
• Function compositionality can be expressed in termsof DAGs,
with binary trees providing the simplest ex-ample. There is an
analogy with n-dimensional tables
decomposable in hierarchical 2-dimensional tables: thishas in
turn obvious connections with HVQ (Hierarchi-cal Vector
Quantization), discussed in Appendix 5.
• Our results extend beyond binary trees network archi-tectures
to other graph structures. The main issue aboutusing the
theoretical results of this paper and networksused in practice has
to do with the many “channels”used in the latter and with our
assumption that eachnode in the networks computes the linear
combinationof r units (Equation 3). The following obvious
butinteresting extension of Theorem 1 to vector-valuedfunctions
says that the number of hidden units requiredfor a given accuracy
in each component of the func-tion is the same as in the scalar
case (but of course thenumber of weigths is larger):
Corollary 3. Let σ : R → R be infinitely differen-tiable, and
not a polynomial. For a vector-function f :Rn → Rq with components
fi ∈ Wnm, i = 1, · · · , qthe number of hidden units in shallow
networks withn inputs, q outputs that provide accuracy at least �
ineach of the components of f is
N = O(�−n/m) . (17)
The corollary above suggests a simple argument thatgeneralizes
our binary tree results to standard, multi-channel deep
convolutional networks.
• We have used polynomials (but see Appendix 4.3) toprove
results about complexity of approximation in thecase of neural
networks. Neural network learning withSGD may or may not synthesize
polynomial, depend-ing on the activation function and on the
target. Thisis not a problem for theoretically establishing
upperbounds on the degree of convergence because resultsusing the
framework on nonlinear width guarantee the“polynomial” bounds are
optimal.
• Both shallow and deep representations may or maynot reflect
invariance to group transformations of theinputs of the function
([Soatto, 2011, Anselmi et al., 2015a]). In-variance – also called
weight sharing – decreases thecomplexity of the network. Since we
are interestedin the comparison of shallow vs deep architectures,we
have considered the generic case of networks (andfunctions) for
which invariance is not assumed. In fact,the key advantage of deep
vs. shallow network – asshown by the proof of the theorem – is the
associatedhierarchical locality (the constituent functions in
eachnode are local that is have a small dimensionality) andnot
invariance (which designates shared weights thatis nodes at the
same level sharing the same function).One may then ask about the
relation of these resultswith i-theory[Anselmi and Poggio, 2016].
The original core ofi-theory describes how pooling can provide
either shal-low or deep networks with invariance and
selectivityproperties. Invariance of course helps but not
exponen-tially as hierarchical locality does.
• There are several properties that follow from the the-ory here
which are attractive from the point of view ofneuroscience. A main
one is the robustness of the re-sults with respect to the choice of
nonlinearities (linearrectifiers, sigmoids, Gaussians etc.) and
pooling.
• In a machine learning context, minimization over atraining set
of a loss function such as the square lossyields an empirical
approximation of the regressionfunction p(y/x). Our hypothesis of
compositionalitybecomes an hypothesis about the structure of the
condi-tional probability function.
2. Spline approximations and Boolean functions
-
• Consider again the case of section 4 of a multivari-ate
function f : [0, 1]d → R. Suppose to discretize itby a set of
piecewise constant splines and their tensorproducts. Each
coordinate is effectively replaced by nboolean variables.This
results in a d-dimensional tablewith N = nd entries. This in turn
corresponds to aboolean function f : {0, 1}N → R. Here, the
assump-tion of compositionality corresponds to compressibilityof a
d-dimensional table in terms of a hierarchy ofd− 1 2-dimensional
tables. Instead of nd entries thereare (d− 1)n2 entries. It seems
that assumptions of thecompositionality type may be at least as
effective as as-sumptions about function smoothness in countering
thecurse of dimensionality in learning and approximation.
• As Appendix 4.3 shows, every function f can be ap-proximated
by an epsilon-close binary function fB .Binarization of f : Rn → R
is done by using k parti-tions for each variable xi and indicator
functions. Thusf 7→ fB : {0, 1}kn → R and sup|f − fB | ≤ �, with�
depending on k and bounded Df .
• If the function f is compositional the associatedBoolean
functions fB is sparse; the converse is nottrue.
• fB can be written as a polynomial (a Walsh decompo-sition) fB
≈ pB . It is always possible to associate a pbto any f , given
�.
• The binarization argument suggests a direct way toconnect
results on function approximation by neuralnets with older results
on Boolean functions. The latterare special cases of the former
results.
3. Sparsity
• We suggest to define binary sparsity of f , in terms ofthe
sparsity of the boolean function pB ; binary sparsityimplies that
an approximation to f can be learned bynon-exponential deep
networks via binarization.
• Sparsity of Fourier coefficients is a a more general
con-straint for learning than Tikhonov-type smoothing pri-ors. The
latter is usually equivalent to cutting highorder Fourier
coefficients. The two priors can be re-garded as two different
implementations of sparsity,one more general than the other. Both
reduce the num-ber of terms, that is trainable parameters, in the
approx-imating trigonometric polynomial – that is the numberof
Fourier coefficients.
• Sparsity in a specific basis. A set of functions may bedefined
to be sparse in a specific basis when the num-ber of parameters
necessary for its �-approximationincreases less than exponentially
with the dimension-ality. An open question is the appropriate
definitionof sparsity. The notion of sparsity we suggest here isthe
effective r in Equation 27. For a general functionr ≈ kn; we may
define sparse functions those forwhich r
-
Figure 7 A shift-invariant, scalable operator. Processing is
from the bottom(input) to the top (output). Each layer consists of
identical blocks, each block hastwo inputs and one output; each
block is an operatorH2 : R2 7→ R. The step ofcombining two inputs
to a block into one output corresponds to coarse-grainingof a Ising
model.
(notice that the connections in the trees of the figuresmay
reflect linear combinations of the input units).
• Low order may be a key constraint for cortex. If it cap-tures
what is possible in terms of connectivity betweenneurons, it may
determine by itself the hierarchicalarchitecture of cortex which in
turn may impose com-positionality to language and speech.
• The idea of functions that are compositions of “sim-pler”
functions extends in a natural way to recurrentcomputations and
recursive functions. For instanceh(f (t)g((x))) represents t
iterations of the algorithmf (h and g match input and output
dimensions to f ).
8 Why are compositional functions so com-mon or important?
First, let us formalize the requirements on the algorithms of
localcompositionality is to define scalable computations as a
subclass ofnonlinear discrete operators, mapping vectors from Rn
into Rd (forsimplicity we put in the following d = 1). Informally
we call analgorithm Kn : Rn 7→ R scalable if it maintains the same
“form”when the input vectors increase in dimensionality; that is,
the samekind of computation takes place when the size of the input
vectorchanges. This motivates the following construction. Consider
a“layer” operator H2m : R2m 7→ R2m−2 for m ≥ 1 with a
specialstructure that we call “shift invariance”.
Definition 2. For integer m ≥ 2, an operator H2m is
shift-invariant if H2m = H ′m ⊕H ′′m where R2m = Rm⊕Rm, H ′ =H ′′
and H ′ : Rm 7→ Rm−1. An operator K2M : R2M → R iscalled scalable
and shift invariant if K2M = H2 ◦ · · ·H2M whereeach H2k, 1 ≤ k ≤M
, is shift invariant.
We observe that scalable shift-invariant operators K : R2m 7→
Rhave the structure K = H2 ◦ H4 ◦ H6 · · · ◦ H2m, with H4 =H ′2 ⊕H
′2, H6 = H ′′2 ⊕H ′′2 ⊕H ′′2 , etc..
Thus the structure of a shift-invariant, scalable operator
consists ofseveral layers; each layer consists of identical blocks;
each blockis an operator H : R2 7→ R: see Figure 7 . We note also
that analternative weaker constraint on H2m in Definition 2,
instead ofshift invariance, is mirror symmetry, that is H ′′ = R ◦H
′, whereR is a reflection. Obviously, shift-invariant scalable
operator areequivalent to shift-invariant compositional functions.
Obviously thedefinition can be changed in several of its details.
For instance for
two-dimensional images the blocks could be operators H : R5 →R
mapping a neighborhood around each pixel into a real number.
The final step in the argument uses the results of previous
sectionsto claim that a nonlinear node with two inputs and enough
unitscan approximate arbitrarily well each of the H2 blocks. This
leadsto conclude that deep convolutional neural networks are
naturalapproximators of scalable, shift-invariant operators.
Here are Let us provide a couple of very simple examples of
com-positional functions. Addition is compositional but degree of
ap-proximation does not improve by decomposing addition in
differentlayers of network; all linear operators are compositional
with noadvantage for deep networks; multiplication as well as the
ANDoperation (for Boolean variables) is the prototypical
compositionalfunction that provides an advantage to deep
networks.
This line of arguments defines a class of algorithms that is
universaland can be optimal for a large set of problems. It does
not howeverexplain why problems encountered in practice should
match thisclass of algorithms. Though we and others have argued
that theexplanation may be in either the physics or the
neuroscience ofthe brain, these arguments (see Appendix 2) are not
(yet) rigorous.Our conjecture is that compositionality is imposed
by the wiring ofour cortex and is reflected in language. Thus
compositionality ofmany computations on images many reflect the way
we describeand think about them.
Acknowledgment
This work was supported by the Center for Brains, Minds
andMachines (CBMM), funded by NSF STC award CCF – 1231216.HNM was
supported in part by ARO Grant W911NF-15-1-0385.We thank O. Shamir
for useful emails on lower bounds.
References[Abadi et al., 2015] Abadi, M., Agarwal, A., Barham,
P., Brevdo, E., Chen, Z.,
Citro, C., Corrado, G. S., Davis, A., Dean, J., Devin, M.,
Ghemawat, S.,Goodfellow, I., Harp, A., Irving, G., Isard, M., Jia,
Y., Jozefowicz, R., Kaiser,L., Kudlur, M., Levenberg, J., Mané, D.,
Monga, R., Moore, S., Murray,D., Olah, C., Schuster, M., Shlens,
J., Steiner, B., Sutskever, I., Talwar, K.,Tucker, P., Vanhoucke,
V., Vasudevan, V., Viégas, F., Vinyals, O., Warden,P., Wattenberg,
M., Wicke, M., Yu, Y., and Zheng, X. (2015). TensorFlow:Large-scale
machine learning on heterogeneous systems. Software availablefrom
tensorflow.org.
[Anselmi et al., 2014] Anselmi, F., Leibo, J., Rosasco, L.,
Mutch, J., Tacchetti,A., and Poggio, T. (2014). Unsupervised
learning of invariant representationswith low sample complexity:
the magic of sensory cortex or a new frameworkfor machine
learning?. Center for Brains, Minds and Machines (CBMM)Memo No. 1.
arXiv:1311.4158v5.
[Anselmi et al., 2015a] Anselmi, F., Leibo, J. Z., Rosasco, L.,
Mutch, J., Tac-chetti, A., and Poggio, T. (2015a). Unsupervised
learning of invariant repre-sentations. Theoretical Computer
Science.
[Anselmi and Poggio, 2016] Anselmi, F. and Poggio, T. (2016).
Visual Cortexand Deep Networks. MIT Press.
[Anselmi et al., 2015b] Anselmi, F., Rosasco, L., Tan, C., and
Poggio, T.(2015b). Deep convolutional network are hierarchical
kernel machines.Center for Brains, Minds and Machines (CBMM) Memo
No. 35, also inarXiv.
[Anselmi et al., 2015c] Anselmi, F., Rosasco, L., and Tan, C.and
Poggio, T.(2015c). Deep Convolutional Networks are Hierarchical
Kernel Machines.
-
Center for Brains, Minds and Machines (CBMM) Memo No. 35, also
inarXiv.
[Anthony and Bartlett, 2002] Anthony, M. and Bartlett, P.
(2002). Neural Net-work Learning - Theoretical Foundations.
Cambridge University Press.
[B. Moore and Poggio, 1998] B. Moore, B. and Poggio, T. (1998).
Representa-tions properties of multilayer feedforward networks.
Abstracts of the Firstannual INNS meeting, 320:502.
[Bach, 2014] Bach, F. (2014). Breaking the curse of
dimensionality with convexneural networks. arXiv:1412.8690.
[Bengio and LeCun, 2007] Bengio, Y. and LeCun, Y. (2007).
Scaling learningalgorithms towards ai. In Bottou, L., Chapelle, O.,
and DeCoste, D.and We-ston, J., editors, Large-Scale Kernel
Machines. MIT Press.
[Bergstra and Bengio, 2012] Bergstra, J. and Bengio, Y. (2012).
Randomsearch for hyper-parameter optimization. J. Mach. Learn.
Res., 13:281–305.
[Chui et al., 1994] Chui, C., Li, X., and Mhaskar, H. (1994).
Neural networksfor localized approximation. Mathematics of
Computation, 63(208):607–623.
[Chui et al., 1996] Chui, C. K., Li, X., and Mhaskar, H. N.
(1996). Limitationsof the approximation capabilities of neural
networks with one hidden layer.Advances in Computational
Mathematics, 5(1):233–243.
[Cohen et al., 2015] Cohen, N., Sharir, O., and Shashua, A.
(2015). On theexpressive power of deep learning: a tensor analysis.
CoRR, abs/1509.0500.
[Corominas and Balaguer, 1954] Corominas, E. and Balaguer, F. S.
(1954).Condiciones para que una funcion infinitamente derivable sea
un polinomio.Revista matemática hispanoamericana, 14(1):26–43.
[Cramer and Wold, 1936] Cramer, H. and Wold, H. (1936). Some
theorems ondistribution functions. J. London Math. Soc.,
4:290–294.
[Delalleau and Bengio, 2011] Delalleau, O. and Bengio, Y.
(2011). Shallow vs.deep sum-product networks. In Advances in Neural
Information ProcessingSystems 24: 25th Annual Conference on Neural
Information ProcessingSystems 2011. Proceedings of a meeting held
12-14 December 2011, Granada,Spain., pages 666–674.
[DeVore et al., 1989] DeVore, R. A., Howard, R., and Micchelli,
C. A. (1989).Optimal nonlinear approximation. Manuscripta
mathematica, 63(4):469–478.
[Fukushima, 1980] Fukushima, K. (1980). Neocognitron: A
self-organizingneural network for a mechanism of pattern
recognition unaffected by shift inposition. Biological Cybernetics,
36(4):193–202.
[Girosi et al., 1995] Girosi, F., Jones, M., and Poggio, T.
(1995). Regularizationtheory and neural networks architectures.
Neural Computation, 7:219–269.
[Girosi and Poggio, 1989] Girosi, F. and Poggio, T. (1989).
Representationproperties of networks: Kolmogorov’s theorem is
irrelevant. Neural Compu-tation, 1(4):465–469.
[Girosi and Poggio, 1990] Girosi, F. and Poggio, T. (1990).
Networks and thebest approximation property. Biological
Cybernetics, 63:169–176.
[Grasedyck, 2010] Grasedyck, L. (2010). Hierarchical Singular
Value Decom-position of Tensors. SIAM J. Matrix Anal. Appl.,
(31,4):2029–2054.
[Hastad, 1987] Hastad, J. T. (1987). Computational Limitations
for Small DepthCircuits. MIT Press.
[Kingma and Ba, 2014] Kingma, D. P. and Ba, J. (2014). Adam: A
method forstochastic optimization. CoRR, abs/1412.6980.
[Lake et al., 2015] Lake, B. M., Salakhutdinov, R., and
Tenenabum, J. B. (2015).Human-level concept learning through
probabilistic program induction. Sci-ence, 350(6266):1332–1338.
[LeCun et al., 2015] LeCun, Y., Bengio, Y., and G., H. (2015).
Deep learning.Nature, pages 436–444.
[Liao and Poggio, 2016] Liao, Q. and Poggio, T. (2016). Bridging
the gap be-tween residual learning, recurrent neural networks and
visual cortex. Centerfor Brains, Minds and Machines (CBMM) Memo No.
47, also in arXiv.
[Lin, 2016] Lin, H.and Tegmark, M. (2016). Why does deep and
cheap learningwork so well? arXiv:1608.08225, pages 1–14.
[Linial et al., 1993] Linial, N., Y., M., and N., N. (1993).
Constant depth cir-cuits, fourier transform, and learnability.
Journal of the ACM, 40(3):607–620.
[Livni et al., 2013] Livni, R., Shalev-Shwartz, S., and Shamir,
O. (2013).A provably efficient algorithm for training deep
networks. CoRR,abs/1304.7045.
[Mansour, 1994] Mansour, Y. (1994). Learning boolean functions
via thefourier transform. In Roychowdhury, V., Siu, K., and
Orlitsky, A., editors,Theoretical Advances in Neural Computation
and Learning, pages 391–424.Springer US.
[Maurer, 2015] Maurer, A. (2015). Bounds for Linear Multi-Task
Learning.Journal of Machine Learning Research.
[Mhaskar, 1993a] Mhaskar, H. (1993a). Approximation properties
of a multi-layered feedforward artificial neural network. Advances
in ComputationalMathematics, pages 61–80.
[Mhaskar et al., 2016] Mhaskar, H., Liao, Q., and Poggio, T.
(2016). Learningreal and boolean functions: When is deep better
than shallow? Center forBrains, Minds and Machines (CBMM) Memo No.
45, also in arXiv.
[Mhaskar and Poggio, 2016] Mhaskar, H. and Poggio, T. (2016).
Deep versusshallow networks: an approximation theory perspective.
Center for Brains,Minds and Machines (CBMM) Memo No. 54, also in
arXiv.
[Mhaskar, 1993b] Mhaskar, H. N. (1993b). Neural networks for
localizedapproximation of real functions. In Neural Networks for
Processing [1993]III. Proceedings of the 1993 IEEE-SP Workshop,
pages 190–196. IEEE.
[Mhaskar, 1996] Mhaskar, H. N. (1996). Neural networks for
optimal approxi-mation of smooth and analytic functions. Neural
Computation, 8(1):164–177.
[Mhaskar, 2004] Mhaskar, H. N. (2004). On the tractability of
multivariateintegration and approximation by neural networks. J.
Complex., 20(4):561–590.
[Mihalik, 1992] Mihalik, J. (1992). Hierarchical vector
quantization. of imagesin transform domain. ELEKTROTECHN. CA5, 43,
NO. 3. 92,94.
[Minsky and Papert, 1972] Minsky, M. and Papert, S. (1972).
Perceptrons: AnIntroduction to Computational Geometry. The MIT
Press, ISBN 0-262-63022-2, Cambridge MA.
[Montufar et al., 2014] Montufar, G. F.and Pascanu, R., Cho, K.,
and Bengio, Y.(2014). On the number of linear regions of deep
neural networks. Advancesin Neural Information Processing Systems,
27:2924–2932.
[Niyogi and Girosi, 1996] Niyogi, P. and Girosi, F. (1996). On
the relationshipbetween generalization error, hypothesis complexity
and sample complexityin regularization networks. Neural
Computation, 8.4.
[Pinkus, 1999] Pinkus, A. (1999). Approximation theory of the
mlp model inneural networks. Acta Numerica, 8:143–195.
[Poggio, 1975] Poggio, T. (1975). On optimal nonlinear
associative recall.Biological Cybernetics, 19:201–209.
[Poggio et al., 2015a] Poggio, T., Anselmi, F., and Rosasco, L.
(2015a). I-theory on depth vs width: hierarchical function
composition. CBMM memo041.
[Poggio and Girosi, 1989] Poggio, T. and Girosi, F. (1989). A
theory of net-works for approximation and learning. Laboratory,
Massachusetts Instituteof Technology, A.I. memo n1140.
[Poggio and Reichardt, 1980] Poggio, T. and Reichardt, W.
(1980). On the rep-resentation of multi-input systems:
Computational properties of polynomialalgorithms. Biological
Cybernetics, 37, 3, 167-186.
[Poggio et al., 2015b] Poggio, T., Rosaco, L., Shashua, A.,
Cohen, N., andAnselmi, F. (2015b). Notes on hierarchical splines,
dclns and i-theory. CBMMmemo 037.
[Poggio et al., 2015c] Poggio, T., Rosasco, L., Shashua, A.,
Cohen, N., andAnselmi, F. (2015c). Notes on hierarchical splines,
dclns and i-theory. Tech-nical report, MIT Computer Science and
Artificial Intelligence Laboratory.
[Poggio and Smale, 2003] Poggio, T. and Smale, S. (2003). The
mathematicsof learning: Dealing with data. Notices of the American
Mathematical Society(AMS), 50(5):537–544.
[Riesenhuber and Poggio, 1999] Riesenhuber, M. and Poggio, T.
(1999). Hi-erarchical models of object recognition in cortex.
Nature Neuroscience,2(11):1019–1025.
[Ruderman, 1997] Ruderman, D. (1997). Origins of scaling in
natural images.Vision Res., pages 3385 – 3398.
-
[Safran and Shamir, 2016] Safran, I. and Shamir, O. (2016).
Depth sepa-ration in relu networks for approximating smooth
non-linear functions.arXiv:1610.09887v1.
[Shalev-Shwartz and Ben-David, 2014] Shalev-Shwartz, S. and
Ben-David, S.(2014). Understanding Machine Learning: From Theory to
Algorithms.Cambridge eBooks.
[Soatto, 2011] Soatto, S. (2011). Steps Towards a Theory of
Visual Information:Active Perception, Signal-to-Symbol Conversion
and the Interplay BetweenSensing and Control. arXiv:1110.2053,
pages 0–151.
[Telgarsky, 2015] Telgarsky, M. (2015). Representation benefits
of deep feed-forward networks. arXiv preprint arXiv:1509.08101v2
[cs.LG] 29 Sep 2015.
Appendix: definitions andobservations, theorems and
theories
1 Boolean Functions
One of the most important tools for theoretical computer
scientistsfor the study of functions of n Boolean variables, their
related cir-cuit design and several associated learning problems,
is the Fouriertransform over the Abelian group Zn2 . This is known
as Fourieranalysis over the Boolean cube {−1, 1}n. The Fourier
expansion ofa Boolean function f : {−1, 1}n → {−1, 1} or even a
real-valuedBoolean function f : {−1, 1}n → [−1, 1] is its
representation as areal polynomial, which is multilinear because of
the Boolean natureof its variables. Thus for Boolean functions
their Fourier represen-tation is identical to their polynomial
representation. In this paperwe use the two terms interchangeably.
Unlike functions of realvariables, the full finite Fourier
expansion is exact, instead of an ap-proximation. There is no need
to distingush between trigonometricand real polynomials. Most of
the properties of standard harmonicanalysis are otherwise
preserved, including Parseval theorem. Theterms in the expansion
correspond to the various monomials; thelow order ones are parity
functions over small subsets of the vari-ables and correspond to
low degrees and low frequencies in thecase of polynomial and
Fourier approximations, respectively, forfunctions of real
variables.
2 Does Physics or Neuroscience imply compo-sitionality?
It has been often argued that not only text and speech are
compo-sitional but so are images. There are many phenomena in
naturethat have descriptions along a range of rather different
scales. Anextreme case consists of fractals which are infinitely
self-similar,iterated mathematical constructs. As a reminder, a
self-similar ob-ject is similar to a part of itself (i.e. the whole
is similar to oneor more of the parts). Many objects in the real
world are statisti-cally self-similar, showing the same statistical
properties at manyscales: clouds, river networks, snow flakes,
crystals and neuronsbranching. A relevant point is that the
shift-invariant scalability ofimage statistics follows from the
fact that objects contain smallerclusters of similar surfaces in a
selfsimilar fractal way. Ruderman[Ruderman, 1997] analysis shows
that image statistics reflects what hasbeen known as the property
of compositionality of objects andparts: parts are themselves
objects, that is selfsimilar clusters ofsimilar surfaces in the
physical world. Notice however that, fromthe point of view of this
paper, it is misleading to say that an im-age is compositional: in
our terminology a function on an imagemay be compositional but not
its argument. In fact, functions to belearned may or may not be
compositional even if their input is animage since they depend on
the input but also on the task (in thesupervised case of deep
learning networks all weights depend onx and y). Conversely, a
network may be given a function whichcan be written in a
compositional form, independently of the na-ture of the input
vector such as the function “multiplication of allscalar inputs’
components”. Thus a more reasonable statement isthat “many natural
questions on images correspond to algorithmswhich are
compositional”. Why this is the case is an interestingopen
question. An answer inspired by the condition of “locality” ofthe
constituent functions in our theorems and by the empirical suc-cess
of deep convolutional networks has attracted some attention.The
starting observation is that in the natural sciences–
physics,chemistry, biology – many phenomena seem to be described
wellby processes that that take place at a sequence of increasing
scalesand are local at each scale, in the sense that they can be
described
-
well by neighbor-to-neighbor interactions.
Notice that this is a much less stringent requirement than
renor-malizable physical processes [Lin, 2016] where the same
Hamiltonian(apart from a scale factor) is required to describe the
process at eachscale (in our observation above, the renormalized
Hamiltonian onlyneeds to remain local at each renormalization
step)1. As discussedpreviously [Poggio et al., 2015a] hierarchical
locality may be related toproperties of basic physics that imply
local interactions at eachlevel in a sequence of scales, possibly
different at each level. Tocomplete the argument one would have
then to assume that severaldifferent questions on sets of natural
images may share some of theinitial inference steps (first layers
in the associated deep network)and thus share some of features
computed by intermediate layers ofa deep network. In any case, at
least two open questions remain thatrequire formal theoretical
results in order to explain the connectionbetween hierarchical,
local functions and physics:
• can hierarchical locality be derived from the Hamiltonians
ofphysics? In other words, under which conditions does
coarsegraining lead to local Hamiltonians?
• is it possible to formalize how and when the local
hierarchicalstructure of computations on images is related to the
hierarchyof local physical process that describe the physical
worldrepresented in the image?
It seems to us that the above set of arguments is
unsatisfactoryand unlikely to provide the answer. One of the
arguments is thatiterated local functions (from Rn to Rn with n
increasing withoutbound) can be Turing universal and thus can
simulate any physicalphenomenon (as shown by the game Life which is
local and Turinguniversal). Of course, this does not imply that the
simulation willbe efficient but it weakens the physics-based
argument. An alterna-tive hypothesis in fact is that locality
across levels of explanationoriginates from the structure of the
brain – wired, say, similarly toconvolutional deep networks – which
is then forced to use localalgorithms of the type shown in Figure
7. Such local algorithmsallow the organism to survive because
enough of the key problemsencountered during evolution can be
solved well enough by them.So instead of claiming that all
questions on the physical world arelocal because of its physics we
believe that local algorithms aregood enough over the distribution
of evolutionary relevant prob-lems. From this point of view
locality of algorithms follows fromthe need to optimize local
connections and to reuse computationalelements. Despite the high
number of synapses on each neuron itwould be impossible for a
complex cell to pool information acrossall the simple cells needed
to cover an entire image, as needed by asingle hidden layer
network.
3 Splines: some observations
3.1 Additive and Tensor Product Splines
Additive and tensor product splines are two alternatives to
radialkernels for multidimensional function approximation. It is
wellknown that the three techniques follow from classical
Tikhonovregularization and correspond to one-hidden layer networks
witheither the square loss or the SVM loss.
1Tegmark and Lin [Lin, 2016] have also suggested that a sequence
of generative processescan be regarded as a Markov sequence that
can be inverted to provide an inference problemwith a similar
compositional structure. The resulting compositionality they
describe does not,however, correspond to our notion of hierarchical
locality and thus our theorems cannot beused to support their
claims.
We recall the extension of classical splines approximation
tech-niques to multidimensional functions. The setup is due to
Jones etal. (1995) [Girosi et al., 1995].
3.1.1 Tensor product splines
The best-known multivariate extension of one-dimensional
splinesis based on the use of radial kernels such as the Gaussian
or themultiquadric radial basis function. An alternative to
choosing aradial function is a tensor product type of basis
function, that is afunction of the form
K(x) = Πdj=1k(xj)
where xj is the j-th coordinate of the vector x and k(x) is
theinverse Fourier transform associated with a Tikhonov
stabilizer(see [Girosi et al., 1995]).
We notice that the choice of the Gaussian basis function for
k(x)leads to a Gaussian radial approximation scheme with K(x)
=e−‖x‖
2
.
3.1.2 Additive splines
Additive approximation schemes can also be derived in the
frame-work of regularization theory. With additive approximation
wemean an approximation of the form
f(x) =
d∑µ=1
fµ(xµ) (19)
where xµ is the µ-th component of the input vector x and the
fµare one-dimensional functions that will be defined as the
additivecomponents of f (from now on Greek letter indices will be
used inassociation with components of the input vectors). Additive
modelsare well known in statistics (at least since Stone, 1985) and
can beconsidered as a generalization of linear models. They are
appeal-ing because, being essentially a superposition of
one-dimensionalfunctions, they have a low complexity, and they
share with linearmodels the feature that the effects of the
different variables canbe examined separately. The resulting scheme
is very similar toProjection Pursuit Regression. We refer to
[Girosi et al., 1995] for ref-erences and discussion of how such
approximations follow fromregularization.
Girosi et al. [Girosi et al., 1995] derive an approximation
scheme ofthe form (with i corresponding to spline knots – which are
freeparameters found during learning as in free knots splines -
andµ corresponding to new variables as linear combinations of
theoriginal components of x):
f(x) =
d′∑µ=1
n∑i=1
cµiK(〈tµ, x〉−bµ) =
∑µ=1
∑i=1
cµiK(〈tµ, x〉−bµi ) .
(20)
Note that the above can be called spline only with a stretch of
theimagination: not only the wµ but also the tµ depend on the data
ina very nonlinear way. In particular, the tµ may not correspond
atall to actual data point. The approximation could be called
ridgeapproximation and is related to projection pursuit. When the
basis
-
function K is the absolute value that is K(x − y) = |x − y|
thenetwork implements piecewise linear splines.
3.2 Hierarchical Splines
Consider an additive approximation scheme (see subsection)
inwhich a function of d variables is approximated by an
expressionsuch as
f(x) =
d∑i
φi(xi) (21)
where xi is the i-th component of the input vector x and the
φiare one-dimensional spline approximations. For linear
piecewisesplines φi(xi) =
∑j cij |x
i − bji |. Obviously such an approxima-tion is not universal:
for instance it cannot approximate the functionf(x, y) = xy. The
classical way to deal with the problem is touse tensor product
splines. The new alternative that we proposehere is hierarchical
additive splines, which in the case of a 2-layershierarchy has the
form
f(x) =
K∑j
φj(
d∑i
φi(xi)). (22)
and which can be clearly extended to an arbitrary depth. The
intu-ition is that in this way, it is possible to obtain
approximation of afunction of several variables from functions of
one variable becauseinteraction terms such as xy in a polynomial
approximation of afunction f(x, y) can be obtained from terms such
as elog(x)+log(y).
We start with a lemma about the relation between linear
rectifiers,which do not correspond to a kernel, and absolute value,
which is akernel.
Lemma 1 Any given superposition of linear rectifiers∑i c′i(x −
b
′i)+ with c′i, b′i given, can be represented
over a finite interval in terms of the absolute value kernelwith
appropriate weights. Thus there exist ci, bi such that∑i c′i(x−
b
′i)+ =∑i ci|x− b
i|.
The proof follows from the facts that a) the superpositionsof
ramps is a piecewiselinear function, b) piecewise linearfunctions
can be represented in terms of linear splines and c) thekernel
corresponding to linear splines in one dimension is theabsolute
value K(x, y) = |x− y|.
Now consider two layers in a network in which we assume
degen-erate pooling for simplicity of the argument. Because of
Lemma 1,and because weights and biases are arbitrary we assume that
the thenonlinearity in each edge is the absolute value. Under this
assump-tion, unit j in the first layer, before the non linearity,
computes
f j(x) =∑i=1
cji |〈ti, x
〉− bi|, (23)
where x and w are vectors and the ti are real numbers. Then
thesecond layer output can be calculated with the nonlinearity | ·
· · |instead of (·)2.
In the case of a network with two inputs x, y the effective
outputafter pooling at the first layer may be φ(1)(x, y) = t1|x +
b1| +t2|y + b2|, that is the linear combination of two “absolute
value”functions. At the second layer terms like φ(2)(x, y) =
|t1|x+b1|+t2|y + b2| + b3| may appear. The output of a second layer
stillconsists of hyperplanes, since the layer is a kernel machine
with anoutput which is always a piecewise linear spline.
Networks implementing tensor product splines are universal in
thesense that they approximate any continuous function in an
interval,given enough units. Additive splines on linear
combinations of theinput variables of the form in eq. (23) are also
universal (use Theo-rem 3.1 in [Pinkus, 1999]). However additive
splines on the individualvariables are not universal while
hierarchical additive splines are:
Theorem Hierarchical additive splines networks are
universal.
4 On multivariate function approximation
Consider a multivariate function f : [0, 1]d → R discretized
bytensor basis functions:
φ(i1,...,id)(x1, ..., xd) :=
d∏µ=1
φiµ(xµ), (24)
with φiµ : [0, 1]→ R, 1 ≤ iµ ≤ nµ, 1 ≤ µ ≤ d
to provide
f(x1, ..., xd) =
n1∑i1=1
· · ·nd∑id=1
c(i1, ..., id)φ(i1, ..., id)(x1, ..., xd).
(25)
The one-dimensional basis functions could be polynomials
(asabove), indicator functions, polynomials, wavelets, or other
setsof basis functions. The total number N of basis functions
scalesexponentially in d as N =
∏dµ=1 nµ for a fixed smoothness class
m (it scales as dm
).
We can regard neural networks as implementing some form of
thisgeneral approximation scheme. The problem is that the type
ofoperations available in the networks are limited. In particular,
mostof the networks do not include the product operation (apart
from“sum-product” networks also called “algebraic circuits”) which
isneeded for the straightforward implementation of the tensor
prod-uct approximation described above. Equivalent
implementationscan be achieve