-
8/3/2019 NET3001 6 Interrupts
1/44
NET3001
Interrupts
-
8/3/2019 NET3001 6 Interrupts
2/44
Interrupts concepts
Programs runs synchronously CPU: fetch-execute cycle (clocked
operation). Activities performed according to order of instructions
in
program What is an interrupt?
Special event requiring CPU to stop normal programexecution and
perform some service related to that event.
Examples: timer completion, I/O event, timeout, I/O
completion, illegal opcode, arithmetic overflow,
divide-by-0,etc.
Interrupts allow forasynchronous execution of
serviceroutines
Example : Classroom questions.
-
8/3/2019 NET3001 6 Interrupts
3/44
Why are Interrupts Used ?
Coordinate the CPU with activities of I/O devices I/O devices
under control of their own circuitry
Data for I/O not under the control of CPU (fire alarm)
Data transfer require CPU and I/O device to synchronize Device
Response times: at least one order of magnitude
slower than instruction execution
CPU response time: want immediate action, preventingCPU from
being tied up
Remind the CPU to perform routine tasks.
Provide a graceful way to handle software/hardware
errors
-
8/3/2019 NET3001 6 Interrupts
4/44
Originally appeared as synchronization mechanism between CPU-
I/O
End of I/O: device informs data transfer successful.
Timer: a given amount of time elapsed
Parity error in memory (memory checking circuits). Wrong Opcode:
Control Unit detects non existing opcode
Requires a wired connection to the CPU
Hardware Interrupt : signal issued by circuitry (event)
CPU interrupt response: temporarily branches to execute
servicesprovided by Interrupt Service Routine (ISR) (executing
programdelayed for a while).
Hardware event triggers software response (internal CPU
circuitry)
Interrupt Mechanism
CPU Device
-
8/3/2019 NET3001 6 Interrupts
5/44
Real Time Programming
Polling Polling: CPU asks all the devices whether there
is anything to do. sequential programming: next instruction
determined
by control transfer instructions:
/* polling */
while (1) {
if (keyPressed())
doKeyStuff();if (timePassed())
doOtherStuff();
}
-
8/3/2019 NET3001 6 Interrupts
6/44
Real Time ProgrammingInterrupts
Physical events (or time) causes interrupt Interrupted
processing: CPU doesnt know it
was interrupted temporarily suspend current thread of control
runs ISR resumes suspended thread of control
-
8/3/2019 NET3001 6 Interrupts
7/44
-
8/3/2019 NET3001 6 Interrupts
8/44
-
8/3/2019 NET3001 6 Interrupts
9/44
-
8/3/2019 NET3001 6 Interrupts
10/44
-
8/3/2019 NET3001 6 Interrupts
11/44
Interrupt Properties Maskable
Interrupt Maskability Maskable interrupts can be
ignored/postponed
by the CPU
Enabled before interrupting the CPU (setting anassociated enable
flag).
NonMaskable interrupts cannot be ignored bythe CPU
Interrupt requestpending: active but not yetserviced May or may
not be serviced (depending on
whether or not it is enabled)
-
8/3/2019 NET3001 6 Interrupts
12/44
-
8/3/2019 NET3001 6 Interrupts
13/44
-
8/3/2019 NET3001 6 Interrupts
14/44
-
8/3/2019 NET3001 6 Interrupts
15/44
-
8/3/2019 NET3001 6 Interrupts
16/44
STM32 Interrupt ProcessingSequence
When does the MCU recognize interruptrequests? When it reaches a
point where it can remember
the execution of the current instruction Why?
after we return from interrupt, we need tocontinue operating as
if nothing had happened!
-
8/3/2019 NET3001 6 Interrupts
17/44
Interrupt Processing Sequence
On the STM32, the interrupt service cycleincludes:
1. finish the current instruction or take it to the stage where
it can be remembered2. save the critical registers on the stack
PSR, PC, LR, r12, r3, r2, r1, r0
3. put 0xFFFF.FFF9 into LR (r14)4. fetch the appropriate vector
into PC (r15)
-
8/3/2019 NET3001 6 Interrupts
18/44
Interrupt Properties : Priority
What happens if two interrupts occur at thesame time ?
CPU assigns priority to each potential source
First, priority STM32 Priority : Assigned in order of their
position in the vector table Increasing priority at higher
address
Reset : highest priority
Timer : lower priority
-
8/3/2019 NET3001 6 Interrupts
19/44
STM32 Interrupt Vector Table
Address Usage
0x0000 starting value of the stack pointer
0x0004 staring location of the program
0x0008
0x000C..380x003C
0x0040..54
0x0058 EXTI pin 0
0x005C EXTI pin 1 (our keyboard)
0x0060 EXTI pin 20x0064 EXTI pin 3
0x0068 EXTI pin 4
non maskable interrupt
....there are 12 others, spec'd by ARMSysTick interrupt
....various others, spec'd by ST
......and many others
-
8/3/2019 NET3001 6 Interrupts
20/44
Interrupt Vectors in C
/* do nothing functions */
void default_isr (void) { return; }
#define STACK_TOP 0x20002000
extern void _start(void);
/* vector table */
void (*myvectors[])(void) __attribute__ ((section(".vectors")))=
{
(void(*)(void)) STACK_TOP, // stack pointer
_start, // code entry point
default_isr, // handle non-maskable interrupts
default_isr, // handle hard faults0,0,0,0, /* 10...1f */
0,0,0,0, /* 20...2f */
0,0,0,timer_isr, /* 30...3f */
0,0,0,0, /* 40...4f */
0,0,0,key_isr /* 50...5f */
};
-
8/3/2019 NET3001 6 Interrupts
21/44
Interrupt Service Routine
ISR is the term usually used for the subroutinethat handles the
interrupt on the way in, you should disable global interrupts
I recommend dint() on many devices, the local interrupt is
disabled, and
blocks further interrupts ofthis type some time in the routine,
you probably want to clear the
IFLG to allow more interrupts ofthis type I recommend you do
this on the way out this is called acknowledging the interrupt
just before you return, you should enable interrupts eint()
-
8/3/2019 NET3001 6 Interrupts
22/44
Interrupt Properties : Priority
What if an interrupt occurs during the execution of theprevious
ISR?
Answer: interrupt processing sequence
Scenario 1: ISR for a low-priority interrupt is runningwhen a
higher-priority interrupt occurs.
Scenario 2: ISR for a high-priority interrupt is runningwhen a
lower-priority interrupt occurs.
Scenario 3: ISR is running when a reset occurs.
St f I t t
-
8/3/2019 NET3001 6 Interrupts
23/44
Steps of InterruptProgramming
Step 1. Initialize the interrupt vector table (Install the
vector) assembly: use the .vectors section and position the
.word pointer to your ISR C: add the entry to the vector
array
Step 2. Write the interrupt service routine assembly: it's just
a subroutine you mustobey the EABI !! don't use r4....r11
C: it's just a subroutine our compiler makes code that is
EABI
Step 3. Re-enable the interrupt hardware If you disable global
interrupts, make sure to re-enable
global interrupts
-
8/3/2019 NET3001 6 Interrupts
24/44
Simple Keypad Driver
Program displays all keystrokes on the 7 segmentdisplay
Runs forever Interrupt-driven : Port A interrupts signal key
press
char key = 0xFF;
main(){; Init Hardware; Enable interruptseint();for (;;) {while
(key == 0xFF)
{}show7Seg(key);key = 0xFF
}
keyboard_isr(void) {
small delaymeasure voltage
convert to key numberkey = key number
acknowledge irqreturn
}
E l I t t D i
-
8/3/2019 NET3001 6 Interrupts
25/44
Example : Interrupt DrivenKeypad
unsigned char key = 0xFF;
int main(void) {
initHardware(); // power up; enable LEDs
/* set up the keyboard interrupt */
EXTI->IMR |= 2; // enable interrupt from bit 1
EXTI->RTSR |= 2; // interrupt on rising
edgeAFIO->EXTICR[0] |= 0; // select the interrupt from port
A
NVIC->ISER[0] |= (1
-
8/3/2019 NET3001 6 Interrupts
26/44
Example : Interrupt DrivenKeypad ISR
void key_isr(void) {
int r;
// measure the A/D value on keyboard pin
r = measureKey();// convert this to a key value and set the
global
key = convertKeyMeasuretoKey(r);
// force the interrupt flag down,
// to get ready for nextEXTI->PR |= 2;
}
// now you must add this routine to the vector table
Programming Interrupts in C
-
8/3/2019 NET3001 6 Interrupts
27/44
Programming Interrupts in CARM vs others
in ARM/Cortex, the ISR is just another subroutine this works
because of the EABI
void timer_isr(void) {
// do things at interrupt time
// and reset the interrupt request (acknowledge) if req'd
}
in other architectures, the ISR must be declared as aspecial
kind of subroutine with certain properties the address of the ISR
is added to the vector table the ISR ends with an reti
instruction
so you must not call your ISR as a normal subroutine
the ISR preserves all registersinterrupt (TIMERB1_VECTOR)
timerB_isr(void) {
// do things at interrupt time
// and reset the interrupt request
} //
-
8/3/2019 NET3001 6 Interrupts
28/44
ISR
yourInterrupt Service Routine should perform any high speed
operations required otherwise, do as little as possible
finish by resetting the interrupt request on the STM32, some
types of interrupt are automatically
reset, such as SysTick most interrupts require a manual reset
for example, the keyboard (PortA interrupts) must finish
with the lineEXTI->PR |= 2; // reset the PendingRequest, bit
1 this process is often called acknowledging the interrupt
C Example : Interrupt Driven
-
8/3/2019 NET3001 6 Interrupts
29/44
C Example : Interrupt DrivenKeypad
voidK_ISR(void) { // you can use any nameint r;
r = measureKeyboard();
key = convertKeyMeasuretoKey(r);
EXTI->PR |= 2; // acknowledge the interrupt}
C Example : Interrupt Driven
-
8/3/2019 NET3001 6 Interrupts
30/44
C Example : Interrupt DrivenKeypad
/* this version turns interrupts back on immediately */
voidKISR(void) { // you can use any nameint r;
eint(); // turn global interrupts back on// we won't get another
keyboard interrupt, because// the P2IFG bit is still set// we MIGHT
get a timer interrupt, but that's ok
r = measureKeyboard();
key = convertKeyMeasuretoKey(r);
EXTI->PR |= 2; // acknowledge the interrupt
}
Asm Example : Interrupt Driven
-
8/3/2019 NET3001 6 Interrupts
31/44
Asm Example : Interrupt DrivenKeypad
.textkisr: push {lr}
bl measureKeyboard // returns the key value in r0
// this routine sends r0 as its argument and returns r0bl
convertKeyMeasuretoKey
ldr r1,=key // save itstrb r0,[r1]
; clear the interrupt request bit (acknowlege)ldr r1,=EXTIldr
r0,[r1,#PR]
orr r0,r0,#2str r0,[r1,#PR]
pop {pc} // and return from ISR
.section .vectors, a
.org 0x5c
.word kisr
-
8/3/2019 NET3001 6 Interrupts
32/44
Interrupt Latency & Overhead
Latency (Response time) Delay from the time that an interrupt
occurs until it is
serviced.
Overhead Time taken to perform a service, over and above the
service itself. Interrupt overhead.
saving registers, then jump to isr (= 11 cycles)
restore the registers at the end, then jump (11 cycles)
22 cycles = 2.8 sec for a 1MHz clock.
Subroutine overhead for EABI
push registers to save
establish the frame sp->r7
pop the regs on the way out
Interrupts do provide short latency (if enabled) but incur
overhead.
S mmar of Interr pt Coding
-
8/3/2019 NET3001 6 Interrupts
33/44
Summary of Interrupt Coding
in Assembler in main code
enable interrupts EINT
in ISR
write it to conform to EABI ack the interrupt
write the IRQ vector
in C in your main code
enable interrupts eint()
write the ISR
ack the interrupt
add the ISR name to the vector table
in both cases
be quick in the ISR, do your heavy work in the main code
Interrupt-Driven versus Polled
-
8/3/2019 NET3001 6 Interrupts
34/44
Interrupt-Driven versus PolledI/O
PollingPro: shortest CPU latency (response time) if busy-
waitingCon: either CPU cant do other work orthe devices
latency dependent on the amount of other work.
InterruptsPros: - Deterministic latency for a device
- CPU can perform other work when idle
- Software structure remains clean when handling
manyinterrupts
Con: Interrupt Overhead Saving and restoring of CPU status and
other registers.
A l i f I t t D i
-
8/3/2019 NET3001 6 Interrupts
35/44
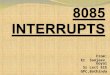
Analysis of Interrupt-DrivenProgram Behaviour
The software is separated into background andforeground threads
of control
CPU Utilization Diagram
time
main init ISR main ISR main ISR
1st Interrupt 2nd Interrupt 3rd Interrupt
What is this value ?Is it deterministic ?At what point in main()
is it interrupting
B h i A l i f
-
8/3/2019 NET3001 6 Interrupts
36/44
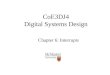
Behaviour Analysis ofInterrupt-Driven Program
Thread Diagrammain ISR Time
char = keystrokeRTI
char = keystrokeRTI
Interrupt
What is this value ?Is it deterministic ?At what point in main()
isit interrupting
Event Driven Thinking : An
-
8/3/2019 NET3001 6 Interrupts
37/44
Event-Driven Thinking : AnInterference Scenario
In the main loop :
Where can interrupts happen ?
Can any data be lost ?
waiting:ldr r1,=key // address of key
ldrb r0,[r1]cmp r0, #0xffbeq waiting
ldr r2,=sevenSegLUTldrb r0,[r2,r0] // convert from key to 7 seg
patternldr r2,=PCOUTstrb r0,[r2]
mov r0,#0xFFstrb r0,[r1] // and write a 0 back into keyment
b #waiting
E ent Dri en Thinking An
-
8/3/2019 NET3001 6 Interrupts
38/44
Event-Driven Thinking : AnInterference Scenario
In the main loop :
Where can interrupts happen ?
Can any data be lost ?
waiting:ldr r1,=keyldrb r0,[r1] // read keycmp r0,#0xFFbeq
waiting
ldr r2,=sevenSegLUTldrb r0,[r2,r0] // convert key value to 7seg
patternldr r2,=PCOUT
strb r0,[r2] // light up the 7 seg LED'smov r0,#0xFFstrb r0,[r1]
// and reset key to 0xFF
b waiting
E t D i Thi ki A
-
8/3/2019 NET3001 6 Interrupts
39/44
Event-Driven Thinking : AnInterference Scenario
Interference : what are the chances of key being
corrupted?
Critical Sections : how can we protect key and preventthe
corruption?
Just an introduction . more to come.
Types of Computer Event Flow
-
8/3/2019 NET3001 6 Interrupts
40/44
Types of Computer Event Flow
Polled, inline code, no O/S like the code we've been
creating
Polled, inline code, with an O/S like the code you wrote in
earlier courses
Interrupt based I/O, no O/S like the code for the next few
assignments
Interrupt based I/O, serviced by the O/S like small operating
systems: OS9
Cooperative multi-tasking like Windows 3/95, original Mac OS
Preemptive multi-tasking
like QNX
Preemptive multi-tasking with virtual memory like Unix, Linux,
WindowsNT/XP, Mac OSX
Simple code flow
-
8/3/2019 NET3001 6 Interrupts
41/44
Simple code flow
Polled, inline code, no O/S written just as a loop of
read/test/decide/act
it's tricky to appear to do 2 or more things at
once it's difficult to modify
Polled, inline code, with an O/S again, a loop, except the
access to I/O is done
by calling back into the O/S for services (viasubroutine
calls)
OS interaction with interrupts
-
8/3/2019 NET3001 6 Interrupts
42/44
OS interaction with interrupts
Interrupt based I/O, no O/S quicker response to events
still need a main task that handles the doing 2 things at once
loop
Interrupt based I/O, serviced by the O/S the O/S deals with
common tasks:
get a key, detect an action
measure the passage of time
measure the battery
read/write to disk/flash you still end up calling the O/S for
services, via subroutines
More sophisticated O/S
-
8/3/2019 NET3001 6 Interrupts
43/44
interaction
Cooperative multi-tasking The situation is turned around: THE
O/S CALLS
YOUR PROGRAM AS A SUBROUTINE! you must write your code as a
subroutine, and it should
act quickly and return ASAP yes, you ARE allowed to call back
into the O/S
this creates deep nests of calling/call-back
the rest of this course deals with cooperative
multitasking
More sophisticated O/Si i
-
8/3/2019 NET3001 6 Interrupts
44/44
interaction
Preemptive multi-tasking You can write your program as if it's
the only one, and
the O/S will switch back and forth between other
programs, making it appear that 2 things arehappening at
once
You can call on the O/S for services, but quite often,the O/S
will wait on your call, for the service tofinish.
not covered in this course