Embed Size (px)
Citation preview

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 1/13

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 2/13
1
1. INTRODUCTION
The problem addressed here is to determine the inclination of a mooring on the seaward side of
the lower fairlead, given the tension recorded at the platform, water depth and immersed weights
of a multiple component line. The motivation for this work lies with the measurement of stabilityin service (MOSIS) of moored platforms (Bradley and MacFarlane 1986a - 1995, MacFarlane
1996). A previous report (Smith and MacFarlane 2000) considered a special case of a three-
component mooring. In particular, the mooring comprised two lines connected by a buoy or
sinker and made tangential contact with the seabed. This report considers an arbitrary number of
components and non-tangential or acute contact with the seabed. The previously developed
method of analysis has so far failed to produce reliable numerical results. However, an
alternative and much simpler method is proposed and this readily extends to an arbitrary numberof components. Examples are provided for a three and nine component configurations.
A three component mooring is shown in Figure 1 – a typical taut deep water mooring made up of
two lines joined at a submerged buoy or sinker. The lower line may connect with an anchor at an
acute angle, in which case, the segment is artificially extended so that the origin of the co-
ordinate axes is more conveniently placed at the point of horizontal inclination. The upper line
connects to a floating platform through a fairlead and winch. The two lines are connected at a
point buoy or sinker. Loads on the mooring are the immersed self weights of the components and
end-point tensions. The lines are considered inextensible. The effects of current flow and time
dependent motions are not considered being averaged and balanced over time.
The first part of the paper reviews the catenary equations in dimensional and dimensionless
forms. The method of solution for the configuration shown in Figure 1 is then developed and a
numerical example is also provided. The analysis is then extended to an arbitrary number of
components without significant change to the methodology. An example is shown for a nine
component mooring, comprising five line segments and four buoys. It should be noted that the
method developed here is for input parameters relevant to the MOSIS assessment of stability and
these may not coincide with those necessary for the design of a mooring system (Niedzwecki and
Casarella 1976, Oppenheim and Wilson 1982).

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 3/13

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 4/13
T T w x T T T w x T h i h i h i h= + − = +cosh( ) , sinh( )α α2 2 1 (8)
i ,
where the subscript i =1,2 for mooring lines on the intervals 0 = s−1 ≤ s < s1 , s1 < s ≤ s2 , and α i , β i ,
and γ i are integration constants to be determined from boundary conditions. The prescribed
parameters for the problem addressed here are H , L1 , L2 , T 2 , w1 and w2 . The tension T h is themain unknown.
3. DIMENSIONLESS EQUATIONS
The prescribed parameters H and T 2 provide for non-dimensionalisation through defining
w w T H W W T T T T F F T i i= = =∗ ∗ ∗2 1 1 2 2, , , = ∗
2
∗
(9)
s s H x x H y y H H H i i i i= = = = =∗ ∗ ∗ ∗, , , ,β β γ γ
in which the superscript ∗ denotes a dimensionless quantity. Note that αi is dimensionless by
definition. Substitution of (9) in (3) to (8) shows that the catenary equations remain valid for the
dimensionless quantities; for example (6) becomes
3
d + βd sinh( ), cosh( ) y x w x T y T w w x T i h i h i i h i i
∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗= + = +α α . (10)
The main advantage of the dimensionless equations is that the unknown T always lies on the
interval
h
∗
0 1< <∗T h . (11)
The dimensionless lengths and tensions become simple proportions of H and T 2 , respectively.
Explicit distinction between the dimensional and dimensionless equations is not necessary as
long as the latter quantities for H ∗ and are understood to be unit values.T 2
∗
4. BOUNDARY CONDITIONS – 1
Origin of the axes
The boundary conditions at the origin of the axes are
s x y dy dx= = = =0 0 0 0, , , , (12)
and this gives for the integration constants
α β γ1 1 1 10 0= = − =, ,T wh . (13)
The integration constants are not directly employed in establishing the equation that governs T h .
Placing the origin at the point of seabed contact introduces less simple relations for the
integration constants and these become employed in establishing the equation that governs T h .
The approach adopted here leads to a simpler derivation.

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 5/13
Point of seabed contact
The position of the seabed contact is not explicitly known with respect to the origin, however, the
length of the lower line above the seabed is incorporated in the boundary conditions through
s L s0 1 1+ = (14)
which implies
T w w x T L T w w x T h h h h1 1 0 1 1 1 1 1 1 1sinh( ) sinh( )+ 1+ + = + +α γ α γ . (15)
Denoting for brevity
S w x T C w x T ij j i h j ij j i h j= + = +sinh( ) cosh( )α αand (16)
in which i = −1, 0, 1, 2 and j = 1, 2, then (15) transforms to
S S w L T h11 01 1 1= + . (17)
A second implicit condition that is employed below is the height of the seabed above the origin y T w w x T
T w C
h h
h
0 1 1 0 1
1 01 1
= 1+ +
= +
cosh( )
.
α β
β
(18)
Connection point
Immediately to the left of the connection point at s = s1 :
4
y T w C dy dx S s T w Sh h1 1 11 1 1 11 1 1 11 1
− − −= + = = +β γ, ( ) , , (19)
where the superscript denotes a negative sided limit. Continuity of distance and displacement
requires
s s y y1 1 1 1
− + − += =, , (20)
where the superscripts denote negative and positive sided limits. The change in slope across
s = s1 is obtained from (3), (4) and noting dy/dx =tanθ :
( )( ) ( ) ( ) ( )dy dx dy dx F s F s T W T h h1 1 1 1 1
+ − + −− = − = . (21)
Applying boundary conditions (20) and (21) gives implicit relations for the integration constants:
S S W T h12 11 1= + , (22)
T w C T w C h h1 11 1 2 12 2+ = +β β
⇒ − = −β β2 1 1 11 2 12T w C T w C h h (23)
and
T w S T w Sh h1 11 1 2 12 2+ = +γ γ
⇒ − = −γ γ2 1 1 11 2 12T w S T w Sh h . (24)
Lower fairlead
The boundary conditions on the seaward side of the lower fairlead are

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 6/13
s s s L y y y H T T = = + = = + =2 1 2 2 0 2, , , (25)
where L2 , H and T 2 have prescribed values. Substitutions for s, y and T from above give
T w S T w S Lh h2 22 2 2 12 2 2+ = + +γ γ
⇒ = +S S w L T h22 12 2 2 (26)
or
T w S T w S Lh h2 22 2 1 11 1 2+ = + +γ γ
⇒ − = − +γ γ2 1 1 11 2 22 2T w S T w S Lh h , (27)
T w C T w C H h h2 22 2 1 01 1+ = + +β β
⇒ − = − +β β2 1 1 01 2 22T w C T w C H h h (28)
and
C T T h22 2= . (29)
Elimination of the integration constants
Elimination of fromγ γ2 − 1
1
(24) and (27) simply gives (26). More importantly, elimination of
fromβ β2 − (23) and (28) gives
T w C T w C T w C T w C H h h h h1 11 2 12 1 01 2 22− = − + . (30)
5. METHOD OF SOLUTION – 1
The boundary conditions are rearranged as nine coupled equations and ordered so that the error is
dependent on only T h. First it is helpful to define
a w w b T w H c w L d W e T t T k k k h= = − = = = =2 1 2 2 1 2 1, , , , , (31)
and noting
2< <T T h .0 (32)
The conditions (17), (22), (26), (29) and (30), and the identity cosh2( )−sinh
2( ) =1, give
(33)C et S C 22 22 22
2 1= =, −
S S c t S S dt S S c t 12 22 2 11 12 01 11 1= − = − = −, , (34)
(35)C S C S C S12 12
2
11 11
2
01 01
21 1 1= + = + = +, ,
a C C C bt ( )01 11 12 0− + − = (36)
where a non-zero result in the last equation denotes the error. A sufficiently small error is
determined from monotone iteration of T h across the interval (32) and a plot of the error against
T h indicates the sensitivity of the solution to small changes of tension. The computational effort
is small specially for the dimensionless formulation where 0 < T h < 1.
5

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 7/13
Grounded Catenary
When the origin of the axes and the point of seabed contact coincide, the lower line is called a
grounded catenary. That is, the line makes tangential contact with the seabed. In this case the
length of the lower line is not usually prescribed. Moreover, L1 cannot exceed the length of a
grounded line. The boundary conditions for the grounded line are slightly simplified where C 01 =
1 and S01 = 0. The equations in the sequence (33) to (36) reduce in number and become
(37)C et S C 22 22 22
2 1= =, −
S S c t S S dt 12 22 2 11 12= − = −, (38)
(39)C S C S12 12
2
11 11
21 1= + = +,
a C C bt ( )1 011 12− + − = . (40)
After solving for T h and S11 , the length of the grounded line
s T w Sh1 1 11= . (41)
6. EXAMPLE – 1
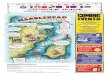
The above method of solution has been coded as a FORTRAN program. The bounding interval of
T h is uniformly divided in 500 steps and the execution time on an Intel 486 33MHz processor is
less than one second. The following input parameters are partly based on data from
Uittenbogaard and Pijfers (1996):(42)w1=100kgf/m, L1=700 m, W 1=10 tef buoy, w2=20 kgf/m, L2=500 m,
H =1000 m, T 2=100 tef
where kgf and tef respectively denote kilogram-force (9.81N) and tonne-force (9810N). A plot
of the iteration is shown in Figure 2 where it is seen that only a single solution exists:
(43)T h / T 2 = 0.40, T 0 / T 2 = 0.45, θ0 = 29 deg, θ2 = 67deg,
s0 / H = 0.22, x0 / H = 0.21, y0 / H = 0.056,
s1 / H = 0.92, ( x1− x0)/ H = 0.42, ( y1− y0)/ H = 0.60,
( x2− x1)/ H = 0.61.
Substitution of these values in the physical boundary conditions, (14) (20), (21) and (25), shows
the numerical error is negligible:
s s L
H
1 0 1 177 10− +
= × −( )
(44)
s s
H
y y
H
dy
dx
dy
dx
W
T h
1 1 17 1 1 16
1 1
1 179 10 9 10 1 10+ −
−+ −
−+ −
−−= ×
−= × ⎛
⎝
⎜⎞
⎠
⎟ − ⎛
⎝
⎜⎞
⎠
⎟ − = ×, , ,(45)
(46)
6

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 8/13
s s L
H
y y H
H
T x T
T
2 1 2 16 2 0 4 2 2
2
171 10 8 10 4 10− +
= ×− +
= ×−
= − ×− −( ),
( ),
( ) − .
A more sophisticated iteration method would reduce the largest error to within the machine
precision, this however, is not usually necessary given the uncertainty of the prescribed
parameters. The integration constants for the upper line are
(47)α 2 = 1.1, β2 / H = −3.9, γ2 / H = −3.2.
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
e r r o r
Th/T2
Figure 2. The error of the reduced boundary conditions versus the horizontal tension.
7. BOUNDARY CONDITIONS – 2
This section extends the boundary conditions developed above to a mooring line comprising
multiple segments with interconnecting buoys or sinkers. The methodology is unchanged and theelimination of the integration constants becomes slightly modified.
Origin of the axes and the point of seabed contact
The boundary conditions at these points remain unchanged and are summarised here. At the
origin of the axes
s x y dy dx= = = =0 0 0 0, , , , (48)
and this gives for the integration constants
7
α β γ1 1 1 10 0= = − =, ,T wh . (49)
The line length from the origin to the point of seabed contact is defined through

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 9/13
s s L1 0 1= + (50)
which gives
S S w L T h11 01 1 1= + (51)
where terms of Sij (and C ij) have been defined in (16).
The height of the seabed above the origin has also been defined as (52)
y T w C h0 1 01 1= + β . (53)
Connection points
The extended case allows for multiple connection points. The conditions at each such point are
similarly defined as above. Immediately to the left of the ith connection point at s = si :
8
y T w C dy dx S s T w Si h i ii i i ii i h i ii i
− − −= + = = +β γ, ( ) , , (54)
where the superscript denotes a negative sided limit. Continuity of distance and displacement
requires
s s y yi i i i
− + − += =, , (55)
where the superscripts denote negative and positive sided limits. The change in slope across s = si
is obtained from (3), (4) and noting dy/dx =tanθ :
( )( ) ( ) ( ) ( )dy dx dy dx F s F s T W T i i i i h i
+ − + −− = − = (56)h .
Applying boundary conditions (55) and (56) gives implicit relations for the integration constants:S S W T i i i i i h, ,+ = +1 , (57)
T w C T w C h i i i i h i i i i, ,+ = ++ + +β β1 1 1
⇒ − = −+ +β βi i h i i i h i i iT w C T w C 1 1, , +1 (58)
and
T w S T w Sh i i i i h i i i i, ,+ = ++ +γ γ1 1
⇒ − = −+ +γ γi i h i i i h i i iT w S T w S1 1, , +1 . (59)
A further condition that generalises the relation for line length in (50), requires
s s Li i i= +−1 . (60)
Substitutions for s gives
T w S T w S Lh i i i h i i i, , i= +−1
⇒ = +−S S w L T i i i i i i h, ,1 . (61)
Lower fairlead
The lower fairlead becomes the I th connection point and the boundary conditions on the seaward
side become

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 10/13
s s s L y y y H T T I I I I I = = + = = + =−1 0, , . (62)
Substitutions for s, y and T from above give
T w S T w S Lh I I I I h I I I I , , I + = + +−γ γ1
⇒ = +−S S w L T I I I I I I h, ,1 , (63)
T w C T w C H h I I I I h, ,+ = + +β β1 0 1 1
⇒ − = − +β β I h h I I I T w C T w C H 1 1 0 1, , (64)
and
C T T I I I h, = (65)
in which T I is the measured or prescribed tension. Note that (63) denotes a particular case of
(61).
Elimination of the integration constants
Elimination of βi follows from (58) and (64). First note that
β β β β β β β β β β
β β
I I I I I
i i
i
I
− = − + − + + − + −
= −
− − −
+=
−
∑
1 1 1 2 3 2 2
1
1
1
L
.
(66)1
Equation (58), (64) and (66) give
T w C T w C H T w C T w C h h I I I h i i i h i i
i
I
1 0 1 1 1
1
1
, , ,− + = − + +
=
−
∑ (67)i,
.
8. METHOD OF SOLUTION – 2
The boundary conditions are rearranged as nine coupled equations and ordered so that the error is
dependent on only T h. First it is helpful to define
a w w b T w H c w L d W e T t T i I i I I i i i i i I h= = − = = = =, , , , , 1
0
(68)
and noting
< <T T h I . (69)
The four conditions (57), (61), (65) and (67), and the identity cosh2( )−sinh
2( ) =1, give
(70)C et S C I I I I I I , , ,,= = 2 1−
S S c t S S d t i I I i i i i i i i i i i− − − − −= − = − = −1 1 1 1 1 1 1, , , ,, , , L, , (71)
(72)C S C Si i i i i i i i− − − − − −= + = +1 1
2
1 1 1 1
21 1, , ,, ,
( )a C a C a C bt i i i i i i
i
I
1 0 1 1 1
1
1
0, , ,− − − =+ +=
−
∑ (73)
9

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 11/13
where a non-zero result in the last equation denotes the error. A sufficiently small error is
determined from monotone iteration of T h across the interval (69) and a plot of the error against
T h indicates the sensitivity of the solution to small changes of tension. The computational effort
is small specially for the dimensionless formulation where 0 < T h < 1.
Grounded Catenary
As discussed above, the prescribed length of the lowest line needs be checked against that of a
grounded catenary. The condition involving L1 is replaced by C 01 = 1 and S01 = 0, which
modifies (71) and (73) so that
S S c t S S d t i I I i i i i i i i i i i− − − − −= − = − = −1 1 1 1 1 1 2, , , ,, , , L, , (74)
and
( )a a C a C bt i i i i i ii
I
1 1 11
1
0− − − =+ +=
−
∑, , .
(75)
9. EXAMPLE – 2
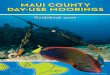
The above method of solution has also been coded as a FORTRAN program. The following input
parameters are partly based the data of the previous example, which has been extended to five
line segments:
(76)w1 = w2 = 100kgf/m, w3 = w4 = 50 kgf/m, w5 = 20 kgf/m,
(77) L1 = L2 = 500m, L3 = L3 = L5 = 300m
(78)W 1 = W 2 = W 3 = 10 tef buoy, W 4 = 5tef buoy,
(79) H =1000 m, T 5=300 tef
where kgf and tef respectively denote kilogram-force (9.81N) and tonne-force (9810N). The
execution time also remains less than one second A plot of the iteration is shown in Figure 3
where it is seen that only a single solution exists. The main part of the solution follows.
(80)
10

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 12/13
T h / T 5 = 0.79, T 0 / T 5 = 0.84, θ0 = 19 deg, θ5 = 38deg.
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
e r r o r
Th/T5
Figure 3. The error of the reduced boundary conditions versus the horizontal tension for five line segments.
10. CONCLUSION
The method of solution developed here is simpler than that presented in a previous report and
readily extends to mooring lines with an arbitrary number of components. The main unknown
parameter is bounded between zero and unit values and is determined by a simple iteration
scheme that uniformly samples the interval. Graphical depiction of the error readily shows if the
solution is non-unique, which is unlikely in most cases.
11. REFERENCES
Bradley, M. S. and MacFarlane, C. J. (1986a) Inclining tests in service. In Stationing and
Stability of Semi-submersibles, editor C. Kuo, Graham & Trotman (Kluwer), London, 83-109.
Bradley, M. S. and MacFarlane, C. J. (1986b) The in-service measurement of hydrostatic
stability. In Proceedings of the Eighteenth Annual Offshore Technology Conference, Houston,
Texas, 4, 491-508.
Bradley, M. S. and MacFarlane, C. J. (1995) Some lessons to be learned from the stability control
of semi-submersibles. In Offshore 95 – Design and Safety Assessment for Floating Installations
– Conference Papers, Institute of Marine Engineers, London.
11

8/6/2019 Multiple Component Moorings
http://slidepdf.com/reader/full/multiple-component-moorings 13/13
12
MacFarlane, C. J. (1996) Discussion of Brown, D. T. and Witz, J. A., Estimation of vessel
stability at sea using roll motion records. Transactions of the Royal Institution of Naval
Architects, 138, 130-145.
Meriam, J. L. (1975) Statics, 2nd edition (SI-Version), John Wiley & Sons, New York.
Niedzwecki, J. W. and Casarella, M. J. (1976) On the design of mooring lines for deep water
applications. Transactions of the ASME – Journal of Engineering for Industry, 98, 514-522.
Oppenheim, B. W. and Wilson, P. A. (1982) Static 2-D solution of a mooring line of arbitrary
composition in the vertical and horizontal operating modes. International Shipbuilding
Progress, 29, 142-153.
Smith, R. J. and MacFarlane, C. J. (2000) Static of a three component mooring line. Ocean
Engineering (accepted).
Symon, K. R. (1971) Mechanics, 3rd edition, Addison-Wesley, Reading, Massachusetts.
Uittenbogaard, R. and Pijfers, J. (1996) Integrated asymmetric mooring and hybrid riser system
for turret moored vessels in deepwater. In Proceedings of the Twenty-eighth Annual Offshore
Technology Conference, Houston, Texas, 3, 67-78.
_____________