Embed Size (px)
Citation preview

MSD1 P16318 Phase IV: Design Review
MSD1 P16318 Phase IV Page 1 of 1 Design Discussion
Discussion Purpose To review the progress that the P16318 team has made to the detailed design.
Discussion Date:
11/17/15
Discussion Location:
Engineering Hall 17-1555
Discussion Time:
11:00 am – 12:30 pm
Discussion Outline
1. Project Design Recap ......................................................................................... 5 minutes
2. Development Test Plans ......................................................................................... 5 minutes
3. Final Test Plan …......................................................................... 5 minutes
4. Circuit Development Analysis ..................................................... 5 minutes
5. Microcontroller Pseudo Code …................................................. 5 minutes
6. Updated Risk Assessment …......................................................................... 5 minutes
7. Updated BOMs ............................................................... 10 minutes
8. Flow Sizing Feasibility ............................................................... 10 minutes
9. Response Time Feasibility ....................................................................................... 10 minutes
10.Modeling Flow (with Dr. Ghosh) …......................................................................... 5 minutes
11.Action Plan for Phase V …..................................................................................... 5 minutes

MSDI P16318 Actuator Response Time Tests 11/15/15
1/3
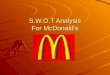
Actuator Response Time Test Date of Test: 11/02/15
Objective:
This test was intended validate the feasibility of our response time engineering requirement. The
requirement is that the valve be able to go from full open to full close in 25ms or less and go from full
closed to full open in 50ms or less.
Summary of Test:
The test set up was very straight forward. In order to validate the response time of the actuator
we gave it a ‘best case scenario’ which involved connecting the actuator to full power (13.5 V) using
our 12V battery with a charger. This would be recorded using a slow motion camera with a stop watch
in the frame. Using this video, we are able to watch and see exactly how long it takes from the time the
actuator starts moving (0 degrees) to full open (75 degrees). Because our range of motion is the middle
55 degrees we can determine the response time by doing this.
Figure 1: Actuator Opening Start

MSDI P16318 Actuator Response Time Tests 11/15/15
2/3
Figure 2: Actuator Opening End.
Figure 3: Actuator Closing Start

MSDI P16318 Actuator Response Time Tests 11/15/15
3/3
Figure 4: Actuator Closing End
Conclusion:
This test was very simple but effective. We found that the actuator, on average took ~50ms to
open and ~30ms to close. In order to get a more exact result we will be repeating the experiment with
the actuator position sensor. This will ensure that we are measuring exactly 55 degrees of travel and
also the exact timing can be pulled from the microcontroller. As a first analysis it is a bit concerning
that we are initially at limit of response time. The system in real life will have some additional friction
and will also need to compensate for the microcontrollers processing time. This will put us above the
required time. We may have to redefine our target values to make this particular actuator work.

P15318 Circuit Board Analysis

Voltage Regulator Circuit
Voltage Regulator
This section of the circuit takes the input voltage from the battery (or other equivalent power source),
and lowers it for use by the Teensy 3.1 microcontroller and sensors. The input and output capacitances
have a smoothing effect on the voltages, while R1 and R2 create the divider that determines the output
voltage level from the equation in the Figure below. Note that RD4_2 and RD4_1 are not part of this
circuit, but instead is part of the sensor array and Op-Amp array, in this case acting as a power source
measurement that the microcontroller can keep track of.
LM317M Datasheet Application Circuit
Note that Vout = 1.25v*(1 + 100k/33.2k) + 0(Negligible) = 5v for our application.

Sensor Array
This section of the circuit is where the various sensors hook into the circuitry. Each sensor will be
outputting some voltage that is run through a voltage divider (divides by ½), and brought to the
MCP6004 Op-Amp array. For the temperature sensor, this division is currently done twice as the sensor
acts like a variable resistor. We are currently in the process of evaluating this sensor at the time of
writing for potential pressure issues, and may be replacing it. There is debate (assuming the sensor is
kept) about the need for a second voltage divider, and the potential loss of accuracy from a double
division.

Op-Amp Array – MCP6004
The MCP6004 chipset contains four operational amplifiers (shown below).
They are configured on our board to act as Voltage Followers (Vout = Vin), which has the beneficial effect
of isolating the output from the signal source. The resistors (RPD1 – RPD5) are loading the output for
use in the Teensy microcontroller.

Teensy 3.1 – Microcontroller
The Teensy 3.1 is the brains of the system. Pins A1 through A4 are taking inputs from the three sensors
as well as tracking the power supplies output. Pins D1 and D2 are outputting to the H-bridge control,
sending PWM signals which will control the direction the actuator is turning. Pin D5 is acting as the
input enable for the H-bridge. Pin D6 is connected to the Disable Input 1 H-Bridge pin.

H-Bridge – MC33931EK
The H-Bridge is responsible for controlling the actuator attached to the Cam that controls the flow
through the device. The cyan connections indicate power directly from the battery (main power
source). This directly powers the actuator. IN1 and IN2 are the inputs from the microcontroller, who
will be setting the output by using PWM signals to set effective voltages across the actuator. Out 1 and
Out 2 represents the outputs to the actuator (VPWR as a square wave that matches IN1 and IN2).

MSDI P16318 Natural Gas Mass Flow Rate Controller:
Revised Flow Modeling for Design
11/16/15

MSDI P16318 Revised Flow Modeling for Design 11/16/15
Flow Model ObjectiveThe flow model is required to determine the minimum opening area of the valve to meet flow specifications over a wide range of operating conditions. It also helps to identify minimum sizes of geometries within the flow path.
Operating Conditions
Max Supply Pressure Maximum fill pressure of on-board natural gas fuel tank; nominal 3600 psig, maximum 4500 psig [1]
Min Supply Pressure Pressure of tanks at “empty”; needs to be discussed with Dr. Press
Regulated Pressure Pressure at which natural gas flow is regulated to, from Dr. Press
Max Atmospheric Pressure Maximum atmospheric pressure recorded [2]
Min Atmospheric Pressure Minimum atmospheric pressure recorded [3]
Max Ambient Temp Maximum temperature in operating range, from Dr. Press
Min Ambient Temp Minimum temperature in operating range, from Dr. Press
Max Required Flow Maximum mass flow rate of controller, from Dr. Press
Flow Model AssumptionsThe flow model makes the following assumptions:
• Natural gas is pure methane
• The flow behaves as an ideal fluid
• The flow is one-dimensional and steady state
• All flow processes are isentropic (neglect heat transfer, flow friction, etc.)
Page: 2/6
Table 1: Ranges of Specified Operating Conditions
Condition SI USMax Supply Pressure: 31000 kPa, g 4500 psigMin Supply Pressure: TBD TBDRegulated Pressure: 400 kPa, g 58 psigMax Atmospheric Pressure: 109 kPa, a 15.8 psiaMin Atmospheric Pressure: 87 kPa, a 12.6 psiaMax Ambient Temp: 85 °C 185 °FMin Ambient Temp: -40 °C -40 °FMax Required Flow: 0.015 kg/s 0.033 lb/s

MSDI P16318 Revised Flow Modeling for Design 11/16/15
Flow Model All equations used in the flow model are from Fox and McDonald's Introduction to Fluid Mechanics [4].
First, the flow is determined to be choked through Equation 1:
Equation 1
where Pcrit is the critical pressure, P0 is the stagnation pressure, and k is the ratio of specific heats. The critical pressure represents the maximum back pressure at the valve opening at which the flow becomessonic. The right hand side of the equation represents the pressure ratio at which flow becomes sonic. Asstagnation pressure increases, higher back pressures can result in sonic flow. If the flow conditions are such that the left hand ratio is less than or equal to the right hand side of the equation when substitutingthe actual back pressure for the critical pressure, then the flow has reached sonic conditions and, hence,is choked; if the flow conditions are such that the left hand ratio is greater than the right hand side, the flow is subsonic and hence not choked. To ensure that the flow remains choked, the conditions which are the least likely to create sonic flow need to be examined—when the critical pressure and ratio of specific heats are maximized and the stagnation pressure is minimized. Since a minimum natural gas tank pressure has yet to be established, it is assumed that the regulated pressure is the lowest stagnationpressure (58 psig). This needs to be an absolute measure for Equation 1 making the lowest stagnation pressure in absolute 70 psia (using the smallest atmospheric pressure). After looking at a range of specific heat values a worst case scenario (though unlikely) would result in the right hand side of Equation 1 being 0.5. With these values now known, the flow can be viewed as choked so long as the pressure at the throat of the valve is below 35 psia. Since the flow is releasing to approximately atmospheric conditions, choked flow is a fairly good assumption for the steady state case.
Now that choked flow has been established, Equation 2 can be used to determine the minimum valve opening area needed to flow the required mass flow rate range:
Equation 2
where At is the opening area, mchk is the choked mass flow rate, P0 is the stagnation pressure, R is the individual gas constant for methane (518.3 J/kg-K), and T0 is the stagnation temperature. This equation shows that larger openings are needed to flow higher mass flow rates, higher tank temperatures, and lower driving pressures, which makes sense. The maximum mass flow rate to be achieved is 0.015
Page: 3/6
Pcrit
P0
=[2
k+1](k /(k−1))
A t=˙mchk
P0 √ RT0
k2
k+1
(k+1)/2(1−k )

MSDI P16318 Revised Flow Modeling for Design 11/16/15
kg/s. The maximum operating temperature is 85°C (358 K). As mentioned above the minimum tank pressure has yet to be determined, so the lowest regulated pressure (70 psia) will have to be used for this calculation. This leaves the ratio of specific heats. This is dependent on the conditions at the valve opening which are unknown. It is unlikely that this ratio will ever be less than 1.1. So this will be used for the calculation. Plugging these values into Equation 2, results in an opening area of 2.054x10-5 m2. If this area were a hole, it would have a 0.2013 in. diameter.
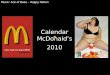
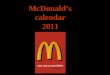
DiscussionThe two unknown variables, “empty” tank pressure and ratio of specific heats, have a large effect on the required opening area to maintain 0.015 kg/s of flow. Figures 1 and 2 below show the variation in opening area (represented as circular hole diameters) with a range of low tank pressures and specific heats, respectively.
Page: 4/6
Figure 1: Required Opening Area with Variation in Stagnation Pressure

MSDI P16318 Revised Flow Modeling for Design 11/16/15
Open ItemsAt what tank pressure should the engine stop receiving the full mass flow rate of fuel?
How can the ratio of specific heats be narrowed down (i.e. how can the thermophysical properties of the flow at the valve opening be approximated better)?
Page: 5/6
Figure 2: Required Opening Area with Variation in Ratio of Specific Heats

MSDI P16318 Revised Flow Modeling for Design 11/16/15
References[1] http://www.afdc.energy.gov/vehicles/natural_gas_filling_tanks.html[2] http://www.wunderground.com/blog/weatherhistorian/world-and-us-anticyclonic-high-
barometric-pressure-records[3] http://www.wunderground.com/blog/weatherhistorian/world-and-us-lowest-barometric-
pressure-records[4] Pritchard, P. and Leylegian, J., 2011, “Fox and McDonald's Introduction to Fluid Mechanics,”
8th Ed., John Wiley & Sons, Inc., US.
Page: 6/6

Specification Test Plans Requirement: Flow accuracy and Repeatability
The device must control the mass flow rate of natural gas accurately. The accuracy will be determined by comparing the actual output of the device against the commanded value as received by the 128 PWM signal. A ±5% difference in actual mass flow rate from commanded flow rate is acceptable; ±1% is the target value; anything better is ideal. The flow must also be repeatable so multiple tests done at the same commanded flow must output the same flow within 5% and ideally 1%.
Materials Needed to test:
Mass flow meter (Press’)
Regulated Input air
Flow meter
Computer for input signal
Location
Thermo Fluids Lab
Test outline
To test this we will input a specified number of flow requirements to the controller. We will manually read the output mass flow from the mass flow meter and will record this data in an excel sheet. Using a correction factor to account for the difference between natural gas and air characteristics we will be able to directly compare the commanded output values to the actual mass flow out and ensure that we are within 1% of our target value. We will repeat a specific commanded flow rate to test repeatability.
To ensure that the flow requirements are still accurate and repeatable through the operational range of input temperatures and pressures, we will take the input signal from our sensors and change it to represent different combinations of flow. From these false inputs we will be able to measure the position of the actuator. From this measurement we can determine that the device has correctly compensated for the inputs.

Requirement: Dynamic Response
The device must react quickly if either the ECU demands wide open or if it requires the device to completely close. These two separate events are the Open Response Time and Close Response Time.
The Open Response Time is the amount of time required for the device to actuate from a closed position to a full open position once it receives a command from the 128PWM signal. 50 ms is both the acceptable and target value; anything faster is ideal.
The Close Response Time is the amount of time required for the device to actuate from a full open position to a closed position once it receives a command from the 128PWM signal. 25 ms is both the acceptable and target value; anything faster is ideal.
Materials Needed to test:
Regulated Input air Flow meter Power Supply Multimeter Oscilloscope Microcontroller Setup; Computer for input signal Function Generator
Location
Thermo Fluids Lab
Test outline
To test the dynamic response of the system we will use the built in position sensor to measure the time from full open to full closed and then from full closed to full open. Using the position sensor and the microcontroller we will be able to collect data and time about the position of the actuator. Once the signal is sent to open the valve we will begin recording clock times and position values. Using this data we can analyze when the flow meter has reached its full open point and the time it took to get there. Similarly to measure the closing time we will have the valve at full open and command full closed. This data will give us the dynamic response time of the system to validate our requirement.

Requirement: Operating Inlet Pressure Range The device receives pressure regulated flow and the output flow must be
insensitive to any expected variations in that inlet pressure. This can be determined by varying the inlet pressure of the device within the expected range of variations from the regulator. The nominal value of the regulated flow is 4 bar,g; the expected variation is ±4%.
Materials Needed to test:
Input air with variable regulator Flow meter Power Supply Multimeter Computer for input signal
Location
Thermo Fluids Lab
Test outline
To test the devices sensitivity to variations in inlet pressure we will need to subject the device to a range of known pressures. Using the pressure regulator on the inlet air source we will dial in small increment psi steps from the minimum value to the maximum. Using the built in pressure transducer we can verify the setting on the pressure regulator. Across all the pressure values the commanded mass flow out should remain the same.. The mass flow out can be measured using the mass flow meter. At each pressure step the measured output flow should be given time to adjust its calculation then be compared to the commanded value.

Requirement: Gas Leak Out of Device
Leak Rate Out of the device is the flow rate of natural gas out of the device, not through the output fitting. This would be leak to atmosphere and is a serious concern when working with a flammable fuel. The acceptable leak rate for this is none.
Materials Needed
Compressed air flow meter tub of water electrical parts disassembled
Test Plan
To test if the GMFRC has any leaks out of the device, ensure actuator is completely closed in rest position and connect 4 bar compressed air to the inlet and fully seal off the outlet fitting, so there is no room for gas to flow. Fill a tank with water and fully submerge the GMFRC under. Turn on the compressed air up to max pressure, 4 bar and observe if any bubbles appear. If there are no bubbles, then the device is leak free. Take seal off the outlet and repeat test.
If there are bubbles, acquire a way to test the ‘rate’ to satisfy ER3.
Requirement: No Gas Leak Through Device Compressed air flow meter tank of water

Location
Thermo Fluids Lab
Test outline
To test the leak through the device the flow meter will be connected to 60 psi compressed air and let settle for 1 minute. With no power to the system the valve should be fully closed. First we will listen for obvious air leaks through the device. We will then hook up the mass flow meter to the outlet of the device and read what, if any, mass flow rate of air is leaking through. This value will be recorded and the experiment will be repeated a number of times to ensure statistical accuracy. The mass flow rate will be converted to SCFM in order to compare to the leak requirement.

Development Test Plans
Requirement: Microcontroller Evaluation Materials Needed
microcontroller micro and mini USB cables to program controller computer with programming software oscilloscope and oscilloscope probes multimeter
Location
Senior Design Bench other labs
Test Plan
Develop code implementing PI control to test the microcontroller. Load/Compile/Program the board to execute code. Run the program and analyze the output readings from controller. Make sure voltage requirements satisfy ER4

Requirement: Sensor Validation
The temperature and pressure sensors currently in the device are necessary for setting the input state in order to provide an accurate output mass flow. These sensors will each need to be validated in order to assure we will be working with correct input data. To validate the temperature sensor we will place it in boiling water to gather a data point at 100C, ice water for C and room temperature with the mass flow meter as room temperature validation. For the pressure sensor we will need to build a sealed pressure chamber with a digital pressure gauge built into it. We will load different pressures and compare the digital sensor to our pressure sensors data sheet. Materials Needed
microcontroller micro and mini USB cables to program controller Electric Hotplate Mass flow meter Digital pressure gauge
Location
Senior Design Bench other labs
Test Plan
Develop code implementing PI control to test the microcontroller. Load/Compile/Program the board to execute code. Run the program and analyze the output readings from controller. Make sure voltage requirements satisfy ER

Requirement: HBridge Validation
The HBridge will be used to provide the correct amount of current to control the actuator.
Materials Needed:
HBridge Function Generator Power Supply (Battery) Oscilloscope and probes actuator
Location
Senior Design Bench
Test Plan
To test the Hbridge in order for it to drive the actuator, the following steps are:
Connect the power supply to the Hbridge Connect the output of the Hbridge to the actuator Connect the function generator to input of the Hbridge Place oscilloscope probe onto output of Hbridge Vary the duty cycle on function generator Observe the waveform on the oscilloscope and motion of the actuator

Requirement: Test Voltage Regulator with Varying Supply Voltages
Validate the voltage regulator to drop down to the desired voltages so the microcontroller and other components do not heat up.
Materials Needed:
Multi Meter Power Supply Voltage Regulator
Location
Senior Design Bench
Test Plan
In order to verify the voltage regulator the following steps are:
Connect the voltage regulator to the power supply To ensure no overheating, use current limiter to 2mA Vary the supply voltage from 8V 13V Record the value of the output of the voltage regulator with multimeter

NNNN NNNNNNNNN NNNNNNNNNNNNNNNN NNNNNNNNNNNN NNNNNNNNNNNNNNNN NNNNNNNN NNNNNNNNNNNNNNNNNN
1 1
1 1 11 1
1 1 1
(1
1
1
1
1
1 1 1
1
1 1
1
1( 1 1
1 (1 1
(1
(1
1
1 11 1 1
1
11 1 1
1
1
1 1 1
1
1 (1 1
11
1 >1 >1
>1
1
1 1
1B
11
111
1 (11
1111
1
1
1 (1
11
1
11
1
1 11
1111
1
11
11
1
>
>
1
11(
11 111
1
11>
11>1
11
1
11
1
1 1
11
> > 1
> 1
!1
1111
111
11
>(
1
1 1
11 11 1
a
11
1
>
1 (1!(!
(1! 1 1 1
1 !1!
11! 1 1 1
1 1!1!
11! 1
1 1(
1
1
NN
NNNNN
NN
NNN
NN
NNNN


















![McDonald's Presentation[1]](https://img.pdfslide.us/doc/110x75/546aeef2af79596c298b4908/mcdonalds-presentation1.jpg)