Embed Size (px)
Citation preview

Modelling extreme rainfalls using a modi®ed random pulseBartlett±Lewis stochastic rainfall model (with uncertainty)
David Cameron a,*, Keith Beven b, Jonathan Tawn c
a Water Resources, The Environment Agency, Tyneside House, Skinnerburn Road, Newcastle Business Park, Newcastle Upon Tyne NE4 7AR, UKb Institute of Environmental and Natural Sciences, Lancaster University, Lancaster LA1 4YQ, UK
c Department of Mathematics and Statistics, Lancaster University, Lancaster LA1 4YF, UK
Abstract
A modi®ed random pulse Bartlett±Lewis stochastic rainfall model is used for extreme rainfall simulation. The model features the
use of a generalised pareto distribution (GPD) to represent the depths of high intensity raincells. A point rainfall record, obtained
from a UK site is used to test the model. Parameter estimation is carried out using a two-stage approach based on the generalised
likelihood uncertainty estimation (GLUE) methodology. This procedure acknowledges the limited sample of the extreme rainfall
data in the observed record in conditioning individual realisations of the random storm model. The extreme rainfall simulations
produced using the model are shown to compare favourably with the site's observed series seasonal maxima. A comparison of the
modelled extreme rainfall amounts, with those obtained from a direct statistical analysis of the data, is also conducted. Ó 2000
Elsevier Science Ltd. All rights reserved.
Keywords: Rainfall; Extreme; Stochastic rainfall modelling; Uncertainty
1. Introduction
The simulation of continuous rainfall time-series iscurrently an important area of hydrological research,particularly within the context of ¯ood estimation. Thisincludes the topics of design storm evaluation and ¯oodfrequency estimation by continuous rainfall-runo�modelling [3,4,7±10,12,23]. In both cases, the quality ofthe resulting estimates is dependent upon the accuratesimulation of the extreme rainfall characteristics of thesite of interest. In addition, in the latter case, the rep-resentation of storm inter-event arrival times is an im-portant control upon the antecedent soil moistureconditions simulated by the rainfall-runo� model. Thetask of continuous rainfall simulation has often beenapproached through the use of a stochastic rainfallmodel (a model which operates through the generationof random rainstorms). One type of stochastic rainfallmodel which is currently popular is the pulse-basedmodel (e.g., the Neyman±Scott model, [14±17,
22,23,25,30,35]; and the Bartlett±Lewis model, e.g.,[24,26±28,30±32,35,36]).
This type of model typically utilises independent, ordependent, variables in order to characterise a randomstorm event in terms of its inter-arrival time and dura-tion. Further statistical distributions are used to rep-resent the attributes of the raincells occurring within therainstorm. The birth and decay of each raincell is ap-proximated as a ``pulse'' (often assumed to be rectan-gular) of individual intensity and duration. The totalstorm intensity at a given timestep is obtained throughthe summation of the intensities of each raincell active atthat timestep.
One of the attractions of pulse-based modelling isthat, through the direct simulation of raincells, the ap-proach is (intuitively) physically reasonable. Indeed,after a pulse-based modelÕs parameters have been opti-mised upon a rainfall data series, that model can oftenadequately reproduce many of the properties of thatdata series (including dry periods). This has been dem-onstrated many times [16,17,24,26,27,32]. However, thecapability of pulse-based models for extreme rainfallsimulation has often been found to be less clear-cut,particularly with respect to the extreme rainfalls of shortduration (e.g., 1 h maxima, [11,17,24,27,36]). These ex-treme rainfall amounts can be extremely important in
www.elsevier.com/locate/advwatres
Advances in Water Resources 24 (2001) 203±211
* Corresponding author. Fax: +44-191-203-4004.
E-mail addresses: [email protected] (D.
Cameron), [email protected] (K. Beven), j.tawn@lancas-
ter.ac.uk (J. Tawn).
0309-1708/00/$ - see front matter Ó 2000 Elsevier Science Ltd. All rights reserved.
PII: S 0 3 0 9 - 1 7 0 8 ( 0 0 ) 0 0 0 4 2 - 7

controlling the ¯ood response of small- to medium-sizecatchments. Consequently, further model developmenthas been conducted in order to tackle this problemthrough the incorporation of di�erent types of raincells[14,16] and/or di�erent representations of raincell in-tensity [17,27].
A key challenge in using these revised models lies inthe estimation of their parameters. For example,parameter estimation may require the subdivision of theavailable observed data series into several di�erent datasets (which are assumed to be representative of the dif-ferent types of raincells or raincell intensities [14]). Thismay be very di�cult to achieve objectively. Indeed, useof the available sample of observed extreme rainfall datawithin the parameter estimation procedure is oftenconducted under the assumption that the sample is anadequate representation of the underlying population ofextreme rainfall events [27]. It is quite likely that thisassumption is incorrect, particularly in data-limited re-gions. Consequently, there may be signi®cant uncer-tainty associated with the parameter values of, and thesimulations obtained from, the model of interest. Thisuncertainty is rarely addressed in this speci®c hydro-logical context.
A recent study by Cameron et al. [11] evaluated threestochastic rainfall models (two pro®le-based models,and Onof and WheaterÕs [27] gamma version of therandom pulse Bartlett±Lewis model, the RPBLGM)using point raingauge data from three independent sitesin the UK. Although providing good simulations of theseasonal extreme rainfall totals of 24 h duration andstandard rainfall statistics at each site, the RPBLGMwas found to underestimate the observed seasonalmaxima of 1 h duration. This problem was related to thein¯exibility of the tail of the gamma distribution used torepresent raincell intensity within the model. This disti-bution has a medium, rather than heavy, tail.
In what follows, we describe a new version of therandom-pulse Bartlett±Lewis model which has beendeveloped for extreme rainfall simulation. Using pointrainfall data from a UK site, we utilise an uncertaintyframework in order to explore parameter estimation forthe component of the model used in extreme rainfallsimulation. This approach acknowledges the limitedrepresentativeness of the observed extreme rainfall datasample. A comparison of the resulting extreme rainfallestimates with those obtained from an analysis of thedata (using standard extreme value methods) is alsoconducted.
2. Rainfall data
Forty-four years (1949±1993) of hourly point rainfalldata were obtained from the Elmdon raingauge(Birmingham, England), and the summer half-year data
(April±September) extracted. In a previous study,Cameron et al. [11] found the reproduction of the shortduration extreme characteristics of this data to be aparticularly di�cult stochastic rainfall modelling chal-lenge. The Elmdon summer data therefore represents areasonable benchmark for evaluating the performanceof the new variant of the Bartlett±Lewis model.
Following many other stochastic rainfall modellingstudies [1,11,27,32,35,36], this paper focuses upon theextreme rainfall totals of 1 h and 24 h duration. Theseasonal maxima (SEAMAX) appropriate to those twodurations were extracted from the observed series rain-fall in a manner consistent with an annual maximummethod of analysis. An examination of the continuoushourly rainfall series also indicated that the 24 h SEA-MAX rainfall totals generally did not occur within thesame 24 h period as the 1 h SEAMAX rainfall amounts.The two SEAMAX rainfall series are therefore largelyindependent. Onof and WheaterÕs [27] random pulseBartlett±Lewis gamma model (RPBLGM) is capable ofadequately reproducing this independence (see [11]).
A siteÕs observed SEAMAX series is only one rep-resentation of a very large number of possibleSEAMAX series of equal record length for that site. It istherefore useful to have an approximate guide to thoseother possible series, particularly when considering theperformance of a stochastic rainfall model. In this study,this guide was obtained through the maximum likeli-hood ®tting of a generalised extreme value (GEV) dis-tribution to the observed SEAMAX series of interest,and the subsequent calculation of pro®le likelihoodcon®dence limits for quantiles (see [11]). The distribu-tion function of the GEV is de®ned as:
F �y� � exp�ÿ�1� s�y ÿ l�=f�ÿ1=s�; �1�where F(y) is a non-exceedance probability, f, s and lthe scale, shape and location parameters and y is a givenSEAMAX rainfall amount. The shape parameter f al-lows for three di�erent shapes of the distribution. On anextreme value probability plot (with the standardExtreme Value I, or Gumbel, reduced variate on thex-axis), for example, a negative value of f will produce aconvex plot, a positive value will yield a concave plot(and indicates a heavy tailed distribution), and a zerovalue produces a linear plot. All of the extreme valueprobability plots displayed in this paper follow thisconvention (return periods, T, in years, are also includedfor convenience).
In many cases of maximum likelihood estimation, if aparameter value (or a quantile of speci®ed return level)is plotted against likelihood, the resulting likelihoodsurface (or pro®le) will be asymmetrical, with a maxi-mum at the maximum likelihood. This information isutilised in the calculation of pro®le likelihood con®dencelimits. In this study, 95% pro®le likelihood con®denceintervals were calculated for the GEV quantiles appro-
204 D. Cameron et al. / Advances in Water Resources 24 (2001) 203±211

priate to the return period levels of the observedSEAMAX rainfall totals of interest. For each of thequantiles, the procedure [2,18] entailed the reparamete-risation and maximisation of the GEV likelihood. Byaccounting for the presence of asymmetry in the likeli-hood surface, this method produces con®dence limitswhich are perhaps more reliable than those which arebased upon the symmetrical con®dence limits centred onthe maximum likelihood estimate of the quantile withtheir width determined by standard error estimates. Itwas assumed that the pro®le likelihood 95% con®dencelimits provided a reasonable guide to the spread of thenumerous possible observed record length SEAMAXrainfall series for the duration that they had beencalculated for.
For the 1 and 24 h durations, it was therefore possibleto assess the performance of the new random pulseBartlett±Lewis model against the observed data (and itscorresponding GEV ®t), and against other possible ob-served series (as represented by the pro®le likelihoodcon®dence limits).
3. The stochastic rainfall model
A new version of the random pulse Bartlett±Lewismodel, which was modi®ed for enhanced extreme rain-fall simulation, was used in this study. This section be-gins with a brief outline of the original random pulseBartlett±Lewis model. The modi®ed model is then de-scribed. The parameter estimation procedures used for®tting the new model are detailed in Section 4.
3.1. The random pulse Bartlett±Lewis model
Full details of the Bartlett±Lewis pulse model areprovided in [19,26,27,30±32], so only a brief summary isgiven here.
The random pulse Bartlett±Lewis model (orRPBLM) describes the random arrival of storms via aPoisson process (governed by the parameter k). Eachstorm origin is followed by a Poisson process of rate jgof cell origins; the process of new cell origins terminatesafter a time that is exponentially distributed withparameter /g. The durations of the raincells are inde-pendent exponentially distributed random variableswith parameter g. For each storm, g is randomly sam-pled from a gamma distribution with the parameters a(shape) and 1/m (scale). The raincell depth is assumed tobe exponentially distributed with the parameter lx.
Onof and Wheater [27] also describe a version of theRPBLM (the RPBLGM) which features gamma (ratherthan exponential) distributed raincell intensities in orderto improve the modelÕs capability for extreme rainfallsimulation. However, recent studies [11,36] have shownthat, at particular sites in Belgium and the UK, the
RPBLGM underestimates the extreme rainfalls of shortduration.
In the case of the Elmdon summer data, Cameronet al. [11] used the RPBLGM to produce multiple,random, simulations of observed series length with anhourly timestep. The model was driven by a singleparameter set (which comprised of seven RPBLGMparameters with values estimated under Onof andWheaterÕs [26,27] procedures). For SEAMAX accumu-lations of 1 and 24 h, the spread of the modelled extremerainfall data was quanti®ed through the calculation of2.5%, median, and 97.5% model simulations directlyfrom each simulated quantile.
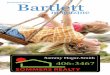
Figs. 1(a) and (b) illustrate the results obtained forthe 1 and 24 h SEAMAX data, respectively. The ob-served series (circles), the GEV ®t and associated pro®lelikelihood 95% con®dence limits (solid lines; Section 2),and the pointwise median (dotted line), 2.5%, and 97.5%(dashed lines) model simulations, are shown. From these®gures, it can clearly be seen that, although theRPBLGM provides good simulations of the 24 h SEA-MAX data, it fails to reproduce the 1 h SEAMAXrainfalls adequately. In other words, the heavy-tailednature of the observed 1 h maxima data cannot be ad-equately reproduced through the multiple, randomcombinations of raincell intensitites of medium-tailedgamma distribution origin. This limitation of theRPBLGM provided the impetus for the further modeldevelopment presented here.
3.2. The random pulse Bartlett±Lewis model with expo-nential and generalised pareto distributed raincell inten-sities
One approach to improving the quality of theRPBLMÕs extreme rainfall simulations is to assume thatthere are two or more classes of raincell (representing,e.g., convective and stratiform rainfall), with each classof raincell possessing its own set of parameters (such asraincell inter-arrival time, duration and depth). Thisapproach has previously been implemented successfullyfor a Neyman±Scott rainfall model [14,16]. However, ifthe only available observed data are, say, a continuoushourly raingauge record (rather than extensive radardata), then there may be problems with respect toparameter estimation under this procedure. In modify-ing the RPBLM, we generalise the distribution of rain-cell intensities from exponential in a di�erent way.
We assume that raincell depth can be of either lowintensity or high intensity. The storm and raincell arrivaland duration processes are modelled in an identicalmanner to the RPBLM. During a model run, the clas-si®cation of a given raincell as being of low or high in-tensity is made via the sampling of an initial depth froman exponential distribution (with parameter lx, Section3.1). If that depth is less than a threshold (u), then the
D. Cameron et al. / Advances in Water Resources 24 (2001) 203±211 205

raincell is of low intensity, its initial depth is retained,and the model proceeds as per the RPBLM. If the depthexceeds u, then the raincell is of high intensity and itsdepth (which is still above u) is resampled from a gen-eralised pareto distribution (GPD). The GPD has thedistribution function:
F �x� � 1ÿ �1� �n�xÿ u�=r��ÿ1=n; n 6� 0;
F �x� � 1ÿ exp �ÿ�xÿ u�=r�; n � 0;�2�
where F(x) is a non-exceedance probability, n a shapeparameter, u (the intensity threshold) a locationparameter, x ) u an exceedance (where x > u), and r is ascale parameter.
The GPD was selected for its ¯exibility. The shapeparameter n allows for three di�erent shapes of thedistribution. On an extreme value probability plot, forexample, a negative value of n will produce a convexplot, a positive value will yield a concave plot, and azero value reduces the GPD to the exponential distri-bution, producing a linear plot. In traditional extremeevent frequency analysis, the GPD can be used tomodel peaks over threshold (POT) data. When coupledwith a Poisson distribution for the number of extremeevents per year, the GPD is equivalent to the use of theGEV to describe annual maxima data (censored at thethreshold, u).
The modi®ed model therefore allows enhanced ex-treme rainfall simulation while keeping the number ofadditional parameters required to a minimum (two:r, n).
4. Parameter estimation
The new Bartlett±Lewis model (here termed theRPBLGPDM) has a total of eight parameters (k, a, m, j,/, lx, r, n). The threshold, u, must also be selected.
Parameter estimation is therefore a challenge. In thispaper, we adopt a two-stage approach to parameterestimation (whereby the Bartlett±Lewis parameters, k, a,m, j, /, lx, are ®tted ®rst, followed by the GPDparameters). In this approach, it is assumed that, sincethe GPD parameters �r; n� are only appropriate to thesimulation of extreme rainfalls, they should only have aminimal impact upon the standard statistics of thesimulated continuous rainfall time-series. It is also as-sumed that the standard statistics of the (relatively large)available observed rainfall data sample (but not theextremes) can be reproduced using a single, acceptable,``regular'' Bartlett±Lewis parameter set (k, a, m, j, /, lx)for continuous rainfall simulation.
4.1. Stage one
The parameters k, a, m, j, /, lx are estimated usingthe iterative moment ®tting procedure of Onof andWheater [26±29]. This procedure requires the use of asmall, representative, set of observed rainfall properties,which are subject to minimal sampling error and cor-relation [32]. Following a period of sensitivity testing,Onof and WheaterÕs [26], R1 set of observed rainfallproperties was selected. This set is de®ned as:
R1 � E Y �1�i
h i; var Y �1�i
h i; cov Y �1�i ; Y �1�i�1
h i;
np�1�; cov Y �6�i ; Y �6�i�1
h i; p�24�
o; �3�
where E is the mean, Y �h�i the ith value in the continuoustime-series of h hourly rainfall depths, var the variance,cov the covariance, and p(h) is the proportion of dry hhour time intervals within the continuous rainfall time-series. A dry interval is de®ned as a period with zerorainfall. Further details of this moment ®tting technique,including those of the objective function, are supplied in[26±28].
Fig. 1. Comparison of the observed and RPBLGM simulated SEAMAX rainfalls for the Elmdon summer season. (a) 1 h duration; (b) 24 h duration.
Circles ± observed SEAMAX rainfalls. Solid line ± observed series GEV distribution and resulting pro®le likelihood 95% con®dence limits. Dotted
line ± median model simulation. Dashed lines ± 2.5% and 97.5% model simulations. (Adapted from [11].)
206 D. Cameron et al. / Advances in Water Resources 24 (2001) 203±211

Table 1 details the parameter set obtained using thisapproach. An examination of the parameter values in-dicates that they are similar to those identi®ed in theearlier studies of Onof and Wheater [26,27] andCameron et al. [11], Tables 2 and 3. Indeed, when theparameter set in Table 1 was used to drive the RPBLM(as a test run) the reproduction of the observed standardrainfall properties was of the same quality as in thoseearlier studies.
4.2. Stage two
Several possible procedures, including Bayesianmethods (through the use of Markov Chain MonteCarlo simulation, e.g., [13,33]), could be used to estimatethe GPD parameters. The approach adopted hereacknowledges the limited representativeness of theobserved series extreme data sample. It also attempts toquantify the uncertainty associated with the GPDparameter estimates and the resulting extreme rainfall
simulations via the generalised likelihood uncertaintyestimation (GLUE) framework of Beven and Binley [6].GLUE is a Bayesian Monte Carlo simulation-basedtechnique, developed as an extension of Spear andHornbergerÕs [34] Generalised Sensitivity Analysis.Freer et al. [21] describe the rationale of the GLUEmethodology within the context of Bayesian statistics.The GLUE approach has previously been applied suc-cessfully in rainfall-runo� and stochastic rainfall mod-elling [5,10,20,21]. This provided the impetus for usingGLUE within this study.
The GLUE methodology rejects the concept of asingle, global optimum parameter set and instead ac-cepts the existence of multiple acceptable (or behav-ioural) parameter sets (the equi®nality concept of Beven[5]). The operation of the GLUE procedure features thegeneration of very many parameter sets from speci®edranges using Monte Carlo simulation. The performanceof individual parameter sets is assessed via likelihoodmeasures which are used to weight the predictions of thedi�erent parameter sets. This includes the rejection ofsome parameter sets as non-behavioural.
The GLUE approach therefore requires the selectionof those parameters which will be generated and evalu-ated, and those which will be held constant (if any).Since the main area of interest in this study is extremerainfall simulation, only the two GPD parameters(r and n) were varied, with the other RPBLGPDMparameters (k, a, m, j, / and lx) and the threshold (u)held constant (note that this approach does not precludethe possibility of a future GLUE analysis of all of theRPBLGPDM parameters).
The values of the parameters k, a, m, j, /, and lx
detailed in Table 1 were used. After an initial period oftesting, a threshold (u) value of 10 mm was set. Thisthreshold results in an average of ®ve exceedances persummer season. It was selected on the basis that itpermitted enhanced extreme rainfall simulation whileminimising the impact of the high intensity raincellsupon the modelled standard rainfall statistics. The fol-lowing procedure was utilised to identify behaviouralparameter sets and simulations.
Five thousand GPD parameter sets (consisting of rand n), were initially generated from independent uni-form distributions over a broad range of parametervalues (with a range of 0.01±15.00 for r and )1.00 to1.00 for n). A single continuous hourly rainfall time-series (of observed record length) was produced for eachparameter set using the full RPBLGPDM. Each of thesesimulations featured the use of the GPD parameter setin combination with the other, ®xed, parameters. Theruns were conducted using a 20 processor parallel LinuxPC cluster at the University of Lancaster, UK. Eachsimulation was then evaluated using two criteria. The®rst assessed the quality of the modelling of the ob-served series 1 h SEAMAX rainfall amounts. The
Table 1
The ®rst six parameters estimated for the RPBLGDPM
Parameter Value
k 0.02
a 3.02
m 0.61
j 0.19
/ 0.04
lx 2.30
Table 2
Bartlett±Lewis parameter values identi®ed by Onof and Wheater [26]a
A M J J A S
k 0.02 0.02 0.02 0.01 0.01 0.02
a 3.85 2.76 2.53 2.29 2.88 2.48
m 1.02 1.17 0.28 0.25 0.69 0.44
j 0.60 0.26 0.29 0.04 0.04 0.42
/ 0.09 0.02 0.04 0.01 0.01 0.07
lx 0.96 2.74 2.28 4.19 3.44 1.73a Only monthly (April (A)±October (O)) parameter values are available
for the summer season from this source.
Table 3
RPBLGM parameter values identi®ed by Cameron et al. [11] for the
Elmdon summer seasona
Parameter Value
k 0.02
a 2.82
m 0.56
j 0.13
/ 0.03
d 0.46
q 1.16a d and q are parameters of the gamma distribution used to represent
raincell intensities (they therefore replace the lx parameter of the
RPBLM).
D. Cameron et al. / Advances in Water Resources 24 (2001) 203±211 207

second was used in order to maintain a consistency withthe assumption that the GPD parameters have a mini-mal impact upon the simulated standard rainfall statis-tics (Section 4). These criteria are described inAppendices A.1 and A.2, respectively.
Following the application of the two criteria, resam-pling of the GPD parameter space was conducted inorder to provide a su�ciently large sample of behav-ioural simulations. As per Cameron et al. [10], a samplesize of 1000 was assumed to be adequate. Likelihoodweighted uncertainty bounds were then calculated fromthe 1000 behavioural simulations for the SEAMAXrainfall totals of 1 and 24 h duration, (Appendix A.3). Onextreme value probability plots, these bounds werecompared with the corresponding observed SEAMAXseries, their GEV ®ts, and the GEVÕs pro®le likelihood95% con®dence limits (which had been calculatedthrough a direct statistical analysis of the data, Section 2).
It is important to recognise that, in the above evalu-ation procedure, the acceptability of a given modelsimulation does not depend solely upon the generatedGPD parameters. The timings, durations, and intensitiesof the raincells which are spawned over the course of thesimulation are also very signi®cant. Taken together withthe GPD parameters, these factors contribute to animportant model realisation e�ect, and it is the modelrealisation as a whole which is evaluated. This e�ect ishandled naturally within the GLUE methodology whichaccepts that there be many models and parameter setsthat are consistent with the set of available observations.
5. Results and discussion
Following the application of the l(q) constraint (Ap-pendix A.1), 1320 simulations (of the initial sample of5000) were retained. Of these, 765 simulations were re-tained on the basis of PAE (Appendix A.2). The systemof evaluation is therefore e�ective in rejecting non-behavioural simulations. Interestingly, when consideredindependently, the parameter ranges of the r and nparameters associated with the 1000 behavioural simu-lations were found to be equally as broad as their initialsampling ranges (Section 4). Indeed, a scatterplot of ragainst n for these behavioural simulations (Fig. 2)indicates that, although there is an important interactionbetween these two parameters, there are acceptableparameter combinations located across a very widerange of the parameter space. Furthermore, an exam-ination of the 1 h SEAMAX L(q) likelihoods (associatedwith the sample of 1000 behavioural simulations; seeAppendix A.3) determined that the ``best'' L(q) valueswere located right across that range. These ®ndingshighlight the importance of the model realisation e�ectin de®ning the acceptability of each model simulation.(Incidentally, because of the realisation e�ect, and
consequently, the broad range of good model ®ts acrossthe behavioural parameter space, it is not possible toproduce useful contour plots of the GPD two-parameterspace.)
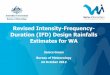
The likelihood weighted RPBLGPDM results for the1 h SEAMAX series (obtained from the 1000 behav-ioural model simulations) are depicted in Fig. 3(a). Theobserved series (circles), the GEV ®t and associatedpro®le likelihood 95% con®dence limits (solid lines), andthe median (dotted line) and 95% (dashed lines) likeli-hood weighted uncertainty bounds, are shown. Thecorresponding 24 h SEAMAX rainfall totals are illus-trated in Fig. 3(b).
Figs. 3(a) and (b) illustrate the RPBLGPDMÕs abilityto reproduce the SEAMAX extremes of the observedrainfall series. These ®gures show a comparison of the95% likelihood weighted uncertainty bounds (calculatedunder the GLUE procedure, Section 4.2 and AppendixA.3) with the GEV pro®le likelihood 95% con®dencelimits. From Fig. 3(a), it can be seen that theRPBLGPDM successfully simulates the observed 1 hSEAMAX series. The 95% uncertainty bounds``bracket'' the observed data, and the median simulationlies close to that data. This result is an improvementupon the previous best-®t performance of the RPBLGMfor the summer season (Fig. 1(a), [11]). (Although itshould be remembered that the RPBLGM results wereobtained using a single parameter set, however, it isunlikely that a GLUE analysis of the RPBLGM would,within the limitations of that modelÕs structure, producesigni®cantly di�erent short duration extreme rainfallsimulations; see [11] for a consideration of di�erentRPBLGM parameterisations.)
Encouragingly, there is also a reasonable agreementbetween the RPBLGPDMÕs 95% uncertainty bounds
0 5 10 15–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
1
gpd scale parameter
gpd
shap
e pa
ram
eter
Fig. 2. Scatterplot of the GPD scale (r) and shape (n) parameters
associated with each of the 1000 behavioural RPBLGPDM simula-
tions. (The likelihoods associated with these simulations are illustrated
in Fig. 3.)
208 D. Cameron et al. / Advances in Water Resources 24 (2001) 203±211

and the pro®le likelihood 95% con®dence limits(although there are some variations at plotting positionsof greater than approximately 2.25, or a return periodlevel of 10 yr). These results indicate that the modelsimulations are consistent with both the observed data,and the other possible 1 h SEAMAX series withobserved record length.
Similar results were also obtained for the 24 h SEA-MAX rainfall totals (Fig. 3(b)). However, at plottingpositions of greater than approximately 1.5 (or a 5 yrreturn period level), the median model simulation and97.5% uncertainty bound indicate higher rainfallamounts than those suggested by the observed series and97.5% con®dence interval. These ®ndings are similar tothose obtained for this site in the earlier RPBLGMstudy of Cameron et al. [11] (see also Fig. 1(b)).
6. Conclusions
This paper has explored the use of a modi®ed versionof the Bartlett±Lewis pulse model for extreme rainfallsimulation for a UK site (44 summer half-year data atElmdon, Birmingham). The greater part of the model isidentical to that of the random pulse Bartlett±Lewismodel (RPBLM) used by Onof and Wheater [26]. Themodi®cation to the model features the use of a gener-alised pareto distribution (GPD) to represent high in-tensity raincell depths. These high intensity raincellsmake a noticeable di�erence to the distribution of 1 hextreme values.
The model is termed the RPBLGPDM and parameterestimation is carried out using a two-stage process. The®rst stage estimates the parameters k, a, m, j, /, and lx
via an iterative moment-®tting procedure (as was the
case for the RPBLM, e.g., [26]). The GPD threshold, u,is then ®xed and the two GPD parameters (r and n)estimated using the generalised likelihood uncertaintyestimation (GLUE) approach of Beven and Binley [6].Following the simulation of numerous continuoushourly rainfall time-series, the GLUE procedure is alsoused to identify behavioural model simulations (whichconsist of acceptable GPD parameter sets operating incombination with favourable random model realisa-tions).
The RPBLGPDMÕs ability to reproduce the observedseries 1 h seasonal maxima (SEAMAX) for the summerseason at Elmdon is superior to the earlier versions ofthe model [11]. The modelÕs reproduction of the 24 hSEAMAX totals is reasonably consistent with that ofearlier versions of the Bartlett±Lewis model (e.g., Onofand WheaterÕs [27] gamma raincell depth version). Thesimulations also compare favourably with a statisticalanalysis of the extreme value data alone.
Acknowledgements
The authors wish to thank the Meteorological O�cefor access to the Elmdon raingauge data. Very gratefulthanks are due to Christian Onof and Howard Wheaterfor access to, and aid with, the exponential and gammaraincell intensity versions of the Bartlett±Lewis model.Stuart Coles is also thanked for comments uponparameter estimation for the gpd raincell intensityversion of the Bartlett±Lewis model. The comments oftwo anonymous referees contributed to the clarity of the®nal manuscript. David Cameron's contribution to thiswork was carried out at Lancaster University under theNERC CASE studentship GT4/97/112/F.
–2 –1 0 1 2 3 4 50
10
20
30
40
50
60
ev1 reduced variate
rain
fall
[mm
]1 2 5 10 25 50 100T [yrs]
–2 –1 0 1 2 3 4 50
20
40
60
80
100
120
140
160
180
200
ev1 reduced variate
rain
fall
[mm
]
1 2 5 10 25 50 100T [yrs]
(a) (b)
Fig. 3. Comparison of the observed and RPBLGPDM simulated SEAMAX rainfalls for the Elmdon summer season. (a) 1 h duration; (b) 24 h
duration. Circles ± observed SEAMAX rainfalls. Solid line ± observed series GEV distribution and resulting pro®le likelihood 95% con®dence limits.
Dotted line ± median model simulation (calculated under the GLUE procedure). Dashed lines ± 95% uncertainty bounds (calculated under the
GLUE procedure).
D. Cameron et al. / Advances in Water Resources 24 (2001) 203±211 209

Appendix A
A.1. Reproduction of 1 h SEAMAX rainfall amounts
The ®t of the simulated 1 h SEAMAX rainfallamounts to those of the observed data was assessedusing a procedure similar to that described in [10]. Thisprocedure assumes that, since the observed 1 h SEA-MAX rainfall amounts are adequately represented by aGEV distribution (Section 2), then a behaviouralRPBLGPDM simulation is one which yields a 1 hSEAMAX GEV ®t which is close to that of the observeddata.
The approach therefore entails the ®tting of a GEVdistribution to the observed SEAMAX data (Section 2)and (independently) to each simulated SEAMAX series.The non-exceedance probabilities of the observed 1 hSEAMAX series (without GEV ®t) are calculated, andthe corresponding rainfall amounts extracted from theobserved series GEV ®t. The evaluation consists of thecalculation of the goodness of ®t of a given simulatedseries GEV ®t to those 44 rainfall quantities. This isconducted using a log likelihood measure (l(q)), as:
l�q� �X44
i�1
ÿ log fs � �ÿ1=ss ÿ 1� � log �1� ss
� �yi ÿ ls�=fs� ÿ �1� ss�yi ÿ ls�=fs�ÿ1=ss; �A:1�where fs, ss and ls are the scale, shape and locationparameters of the GEV distribution ®tted to the simu-lated series, and yi is a SEAMAX amount extractedfrom the GEV distribution ®tted to the observed series.
A simulation is retained as behavioural if:
Dpa6TD; �A:2�where D is the deviance calculated between the maxi-mum value of l(q) in the sample of 5000 parameter sets(l(P)), and the value of l(q) for a given parameter set(pa), as:
Dpa � 2�l�p� ÿ l�q�pa� �A:3�and TD is a threshold deviance of 6.25 obtained fromthe v2 distribution at 3 d.f. (for the GEV) and prob-ability level P� 0.9 (see [10] for a further description ofthis procedure and the choice of thresholds).
A.2. Reproduction of standard rainfall statistics
The simulations which were retained as behaviouralunder the l(q) constraint (Appendix A.1) were alsoevaluated in terms of their ability to reproduce the ob-served series values of E�Y �h�i � and var�Y �h�i � (Section 4.1)at the h hourly timescales of 1 and 24. This was done inorder to maintain a consistency with the assumption
that the GPD parameters have a minimal impact uponthe standard rainfall statistics (Section 4). For eachstatistic, the percentage absolute error (PAE) was cal-culated. It is de®ned as:
PAE � 100 �statsimj ÿ statobs�=statobsj; �A:4�where stat is the statistic of interest, and sim and obs arethe simulated and observed series, respectively.
A simulation was de®ned as behavioural if the PAEwas less than or equal to 10% for each statistic of interest.This acceptance threshold was based upon the range ofstatistics obtained from the production of multipleRPBLM realisations using the parameters in Table 1.The performance of the RPBLGPDM for the Elmdonsummer data is therefore very similar to that of theRPBLM with respect to the standard rainfall statistics.
A.3. Calculation of likelihood weighted uncertainty
bounds
Likelihood weighted uncertainty bounds were calcu-lated from the 1000 behavioural simulations for theSEAMAX rainfall totals of 1 and 24 h duration. In theformer case, the l(q) values calculated during the eval-uation were used. In the latter, further l(q) values werecalculated between the observed 24 h SEAMAX rainfalltotals and those associated with each of the 1000behavioural simulations. In each case, the exponential ofl(q) was taken in order to yield the likelihood measureL(q) (where each likelihood is equivalent to a prob-ability). A standard procedure [10,21] was then used tocalculate the uncertainty bounds independently for eachduration.
This procedure involved the rescaling of the L(q)likelihood weights over all of the behavioural simula-tions in order to produce a cumulative sum of 1.0. A cdfof rainfall estimates was constructed for each SEAMAXamount of the duration of interest using the rescaledweights. Linear interpolation was then used to extractthe rainfall estimate appropriate to cumulative likeli-hoods of 0.025, 0.50, and 0.975. This allowed 95% un-certainty bounds, in addition to a median simulation, tobe derived.
References
[1] Acreman MC. A simple stochastic model of hourly rainfall for
Farnborough, England. Hydrol Sci J 1990;35:119±48.
[2] Azzalini A. Statistical inference: based on the likelihood. London:
Chapman & Hall; 1995.
[3] Beven K. Hillslope runo� processes and ¯ood frequency charac-
teristics. In: Abrahams AD, editor. Hillslope processes. London:
Allen and Unwin; 1986. p. 187±202.
[4] Beven K. Towards the use of catchment geomorphology in ¯ood
frequency predictions. Earth Surf Process Landforms 1987;12:69±
82.
210 D. Cameron et al. / Advances in Water Resources 24 (2001) 203±211

[5] Beven KJ. Prophecy, reality and uncertainty in distributed
hydrological modelling. Adv Water Resources 1993;16:41±51.
[6] Beven KJ, Binley A. The future of distributed models: model
calibration and uncertainty prediction. Hydrol Process
1992;6:279±98.
[7] Blazkova S, Beven KJ. Frequency version of TOPMODEL as a
tool for assessing the impact of climate variability on ¯ow sources
and ¯ood peaks. J Hydrol Hydromech 1995;43:392±411.
[8] Blazkova S, Beven KJ. Flood frequency prediction for data
limited catchments in the Czech Republic using a stochastic
rainfall model and TOPMODEL. J Hydrol 1997;195:256±78.
[9] Blazkova S, Beven KJ. Flood frequency estimation by continuous
simulation for an ungauged catchment (with fuzzy possibility
uncertainty estimates). Water Resources Res, in review [submit-
ted].
[10] Cameron D, Beven K, Tawn J, Blazkova S, Naden P. Flood
frequency estimation for a gauged upland catchment (with
uncertainty). J Hydrol 1999;219:169±87.
[11] Cameron D, Beven K, Tawn J. An evaluation of three stochastic
rainfall models. J Hydrol 2000;228:130±49.
[12] Cameron DS, Beven KJ, Tawn J, Naden P. Flood frequency
estimation by continuous simulation (with likelihood based
uncertainty estimation). Hydrol Earth Syst Sci, in review [sub-
mitted].
[13] Coles SG, Powell EA. Bayesian methods in extreme value
modelling; a review and new developments. J Int Stat Rev
1996;64:119±36.
[14] Cowpertwait PSP. A generalized point process model for rainfall.
Proc Roy Soc London Series A 1994;447:23±37.
[15] Cowpertwait PSP. A generalized spatial-temporal model based on
a clustered point process. Proc Roy Soc London Series A
1995;450:163±75.
[16] Cowpertwait PSP, OÕConnell PE. A regionalised Neyman±Scott
model of rainfall with convective and stratiform cells. Hydrol
Earth Syst Sci 1997;1:71±80.
[17] Cowpertwait PSP, Metcalfe AV, OÕConnell PE, Mawdsley JA.
Stochastic point process modelling of rainfall: 1. Single-site ®tting
and validation. 2. Regionalisation and disaggregation. J Hydrol
1996;175:17±65.
[18] Cox DR, Hinkley DV. Theoretical statistics. London: Chapman
& Hall; 1974.
[19] Cox DR, Isham V. Stochastic models of precipitation. In: Barnett
V, Turkman KF, editors. Statistics for the enviroment 2: water
related issues. Chichester, UK: Wiley; 1994. p. 3±18.
[20] Franks SW, Gineste P, Beven KJ, Merot P. On constraining the
predictions of a distributed model: the incorporation of fuzzy
estimates of saturated areas into the calibration process. Water
Resources Res 1998;34:787±98.
[21] Freer J, Beven K, Ambroise B. Bayesian uncertainty in runo�
prediction and the value of data: an application of the GLUE
approach. Water Resources Res 1996;32:2163±73.
[22] Gupta VK, Waymire EC. A stochastic kinematic study of
subsynoptic space±time rainfall. Water Resources Res
1979;15:637±44.
[23] Hashemi AM, O'Connell PE, Franchini M, Cowpertwait PSP. A
simulation analysis of the factors controlling the shapes of ¯ood
frequency curves. In: Wheater H, Kirby C, editors. Proceedings of
the British Hydrological Society International Conference on
Hydrology in a Changing Environment, vol. 3, July 1998; Exeter.
p. 39±49.
[24] Khaliq MN, Cunnane C. Modelling point rainfall occurrences
with the modi®ed Bartlett±Lewis rectangular pulses model.
J Hydrol 1996;180:109±38.
[25] Kilsby CG, Fallows CS, O'Connell PE. Generating rainfall
scenarios for hydrological impact modelling. In: Wheater H,
Kirby C, editors. Proceedings of the British Hydrological Society
International Conference on Hydrology in a Changing Environ-
ment, vol. 1, July 1998; Exeter. p. 33±42.
[26] Onof C, Wheater HS. Modelling of British rainfall using a
random parameter Bartlett±Lewis rectangular pulse model.
J Hydrol 1993;149:67±95.
[27] Onof C, Wheater HS. Improvements to the modelling of British
rainfall using a modi®ed random parameter Bartlett±Lewis
rectangular pulse model. J Hydrol 1994a;157:177±95.
[28] Onof C, Wheater HS. Improved ®tting of the Bartlett±Lewis
rectangular pulse model for hourly rainfall. Hydrol Sci J
1994b;39:663±80.
[29] Onof C, Wheater HS, Isham V. Note on the analytical expression
of the inter-event time characteristics for Bartlett±Lewis type
rainfall models. J Hydrol 1994c;157:197±210.
[30] Rodriguez-Iturbe I, Cox, DR, Isham V. Some models for rainfall
based on stochastic point processes. Proc Roy Soc London A
1987a;410:269±88.
[31] Rodriguez-Iturbe I, Febres de Power B, Valdes JB. Rectangular
pulses point process models for rainfall: analysis of empirical data.
J Geophys Res 1987b;92D8:9645±56.
[32] Rodriguez-Iturbe I, Cox DR, Isham V. A point process model for
rainfall: further developments. Proc Roy Soc London A
1988;417:283±98.
[33] Smith AF, Roberts GO. Bayesian computation via the Gibbs
sampler and related Markov Chain Monte Carlo methods. J Roy
Stat Soc, Series B 1993;55:3±23.
[34] Velghe T, Troch PA, De Troch FP, Van de Velde J. Evaluation of
cluster-based rectangular pulse point process models for rainfall.
Water Resources Res 1994;30:2487±857.
[35] Spear RC, Hornberger GM. Eutrophication in Peel Inlet, II,
Identi®cation of critical uncertainties via generalised sensitivity
analysis. Water Resources Res 1980;14:43±9.
[36] Verhoest N, Troch PA, De Troch FP. On the applicability of
Bartlett±Lewis rectangular pulses models in the modelling of
design storms at a point. J Hydrol 1997;202:108±20.
D. Cameron et al. / Advances in Water Resources 24 (2001) 203±211 211