Embed Size (px)
Citation preview

Available online at www.sciencedirect.com
Mathematics and Computers in Simulation 82 (2011) 318–331
Original article
Modelling and qualitative analysis of a predator–prey system withstate-dependent impulsive effects�
Yuan Tian a,∗, Kaibiao Sun b, Lansun Chen c
a School of Information Engineering, Dalian University, Dalian 116622, People’s Republic of Chinab School of Control Science and Engineering, Dalian University of Technology, Dalian 116024, People’s Republic of China
c School of Mathematical Science, Dalian University of Technology, Dalian 116024, People’s Republic of China
Received 1 January 2010; received in revised form 15 April 2011; accepted 26 August 2011Available online 3 September 2011
Abstract
In this work, according to integrated pest management principles, a class of predator–prey system with state-dependent impulsiveeffects is put forward. In this model, the control strategies by releasing natural enemies and spraying pesticide at different thresholdsare considered. The sufficient conditions for the existence and stability of the semi-trivial periodic solution and the positive order-1periodic solution are given by the Poincaré map and the properties of the Lambert W function. In addition, to verify the feasibilityof our main results, the numerical simulations are carried out.© 2011 IMACS. Published by Elsevier B.V. All rights reserved.
Keywords: Impulsive differential equations; Periodic solution; Predator–prey system; Stability; State-dependent
1. Introduction
In the recent decades, considerable work on the permanence, the extinction and the global asymptotic stability ofepidemic models and Lotka–Volterra type systems have been studied extensively, for example [3–5,8,9,13,17,21–23].In population dynamics, the effect of pest control has become an increasingly complex issue. In pest management,insecticides are useful because they quickly kill a significant proportion of an insect population and they sometimesprovide the only feasible method for preventing economic loss. However, there are many deleterious effects associatedwith the use of chemicals that need to be reduced or eliminated. Another important method for pest control is biologicalcontrol, which is a manipulation of existing natural enemies to increase their effectiveness. This can be achieved bymass production and periodic release of natural enemies of the pest, and by genetic enhancement of the enemies toincrease their effectiveness at control. However, researches on augmentation as a biological control method have shown
that some practices are cost-effective and others are not. Integrated pest management (involves combining biological,mechanical, and chemical tactics) has been proved to be more effective than the classic methods (such as biologicalcontrol or chemical control) both experimentally (e.g. [16,19,20]) and theoretically (e.g., [1,23]).� This paper is supported in part by the National Natural Science Foundation of China (Grant Nos.: 11101066, 61074044 and 90818025) and theFundamental Research Funds for the Central Universities.
∗ Corresponding author: Tel. +86 411 84706402.E-mail address: [email protected] (Y. Tian).
0378-4754/$36.00 © 2011 IMACS. Published by Elsevier B.V. All rights reserved.doi:10.1016/j.matcom.2011.08.003

eMrLsttTpe
Hpittsoahcd
ppsp
2
i
Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331 319
Many dynamical systems have an impulsive dynamical behavior due to abrupt changes at certain instants during thevolution process. The mathematical description of these phenomena leads to impulsive differential equations [12].any papers have introduced impulsive differential equations in their dynamics and have obtained some interesting
esults, for example, Tang and Chen [14], Tang and Cheke [15], Tang et al. [16], Jiang and Lu [6,7] introduced theotka–Voterra model with state dependent impulsion and analyzed the existence and stability of a positive period-1olution. However, these models only consider the impulsive effects (poisoning the prey and releasing the predator) athe same threshold at the same time. They ignored the side effects of pesticide on natural enemies, and they assumedhe time of spraying pesticide and the releasing of natural enemies is at the same. Recently, Nie et al. [10,11] andian et al. [18] proposed a predator–prey state-dependent impulsive model by releasing natural enemies and sprayingesticide at different thresholds, and analyzed the existence and stability of the periodic solution. The model in Niet al. [11] can be written as⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
dx(t)
dt= x(t)[a − by(t)]
dy(t)
dt= y(t)
[λbx(t)
1 + bhx(t)− d
]⎫⎪⎪⎬⎪⎪⎭ x /= h1, x /= h2
�x = 0
�y(t) = τ
}x = h1
�x = −px(t)
�y(t) = −qy(t)
}x = h2
(1.1)
owever, it can be seen from model (1.1) and the analysis of Examples (see Appendix A) that when the amount of therey reaches the threshold h1, it will be kept at that level, and the amount of the predator will tend to infinite by thempulsive effect. In fact, this phenomenons is unreasonable in realistic predator–prey system. The level h1 is the firsthreshold, when the amount of the prey reaches the level, the first control measure, i.e., biological control is taken. Inhis case fixed amount of the predator is released into the system and the amount of prey is unchanged. But this controltrategy cannot be taken unrestrictedly. When the amount of predator in the system is larger than a level, i.e., the amountf predator is sufficient to keep the balance of zoology, the biological control strategy should be canceled, the predatornd the prey will propagate according to the order of nature until the amount of prey reaches the second threshold2. Motivated by providing a reasonable model taking into account the biological and chemical control strategy, weonstruct a predator–prey state-dependent impulsive system by releasing natural enemies and spraying pesticide atifferent thresholds.
This paper is organized as follows. In Section 2, a predator–prey model with state-dependent impulsive effects isut forward. One Poincaré map and some basic definitions are given. In Section 3, a general criterion for a positiveeriodic solution of the proposed system is constructed. In Section 4, the sufficient conditions for the existence andtability of positive periodic solutions of proposed system are given. In the last section, two specific examples areresented to illustrate the main results.
. Model formulation and preliminaries
According to biological and chemical control strategy for pests, the Lotka–Volterra predator–prey state-dependentmpulsive system from releasing natural enemies and spraying pesticide at different thresholds can be written as⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
dx(t)
dt= x(t)[a − by(t)]
dy(t)
dt= y(t)
[λbx(t)
1 + bhx(t)− d
]⎫⎬⎭ x /= h1, x /= h2
x = h1, y � σy∗
�x = 0}
∗ (2.1)
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩�y(t) = τx = h1, y < σy
�x = −px(t)
�y(t) = −qy(t)
}x = h2

320 Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331
where x and y represent the population densities at time t; a, b, λ, h and d are positive constants with λ > dh, τ ≥ 0,p, q ∈ (0, 1), 0 < (1 − p)h2 < h1 < h2, y∗ = a/b, σ ∈ [0, + ∞]. When the amount of the prey reaches the threshold h1 attime th1 and the amount of the predator is less than σ times of y∗, controlling measures are taken (releasing naturalenemies, that is the predator) until the amount of the predator larger than σ times of y∗. Further, when the amount ofthe prey reaches the threshold h2 at time th2 , spraying pesticide and the amount of prey and predator abruptly turns to(1 − p)xth2
and (1 − q)y(th2 ), respectively.By the biological background of system (2.1), we only consider the dynamic behavior of system (2.1) in the region
Ω := {(x, y)|x � 0, y � 0}. In particularly, when σ is big enough (i.e., σ→ ∞), then the system (2.1) turns to the system(1.1) in [11], i.e.,
Set R = (− ∞ , + ∞). Let S ⊆ R2 be an arbitrary set and P ∈ R2 be an arbitrary point. Then the distance between thepoint P and the set S is denoted by
d(P, S) = infP0∈S
|P − P0|.
Let z(t) = (x(t), y(t)) be any solution of system (2.1) and the positive orbit through the point z0 ∈ R2+ = {(x, y) : x �0, y � 0} for t � t0 is defined as
O+(z0, t0) = {z ∈ R2+, t � t0, z(t0) = z0}.
To discuss the dynamics of system (2.1), we define three cross-sections to the vector field of (2.1) by∑
1 = {(x,y) : x = (1 − p)h2, y � 0},
∑2 = {(x, y) : x = h1, y � 0} and
∑3 = {(x, y) : x = h2, y � 0}. Suppose that the trajectory
O+(Gn, tn) starts from the point Gn(h2, yn) on∑
3, then it jumps to the point En+1((1 − p)h2, (1 − q)yn) on∑
1 due tothe impulsive effects �x = (1 − p)x and �y = (1 − q)y, and then reaches the point Fn+1(h1, yn+1) on the section
∑2. If
yn+1 < σy∗, then the state is changed from Bn to B+n (h1, yn+1 + τ) on
∑2 due to impulsive effects �x = 0 and �y = τ.
Else, the state retains at Bn. Further, the trajectory reaches the point Gn+1(h2, yn+1) on∑
3, where yn+1 is decided bythe parameters q, τ and yn. Therefore, we defined the Poincaré map of
∑3 as follows
yn+1 = P(q, τ, σ, yn). (2.2)
Definition 1 (Orbital stability). z∗(t) is said to be orbitally stable if, given ε > 0, there exists δ = δ(ε) > 0 such that, forany other solution z(t) of system (2.1) satisfying |z∗(t) − z(t)| < δ, then d(z(t), O+(z0, t0)) < ε for t > t0.
Definition 2 (Asymptotic orbital stability). z∗(t) is said to be asymptotically orbitally stable if it is orbitally stable andfor any other solution z(t) of system (2.1), there exists a constant η > 0 such that if |z∗(t0) − z(t0)| < η, then lim t→∞d(z(t),O+(z0, t0)) = 0.
Definition 3 (Definition 1 in [11]). A trajectory O+(z0, t0) of system (2.1) is said to be order-k periodic if there existpositive integer k � 1 such that k is the smallest integer for yk = y0.
Definition 4 (Definition 3 in [11] (Corless et al. [2])). Lambert W function W is defined as multiple valued inversefunction of f : y → yey = x. Then we have W(x)eW(x) = x, and its derivative satisfies:
x(1 + W(x))W ′(x) = W(x)
when x /= 0 and x /= − 1/e. W(x) has two branches when x > − 1/e, here we define W0(x) as principal branch satisfyingW0(x) ≥ − 1 and another branch as W−1(x) satisfying W−1(x) ≤ − 1.
3. Existence and stability of positive periodic solution with τ = 0
Before presenting the main results, we first introduce several notations which will be used in the followings. Let∗
H > h1 be the root of the following equation(1 + bhx
1 + bhh1
)λ=
(x
h1
)dh,

a
T
L
P
I
Ti
t
L
T
T
hτ
P
Tw
P
Ta
Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331 321
nd denote
L1 = λ
hln
(1 + bhh1
1 + (1 − p)bhh2
)− d ln
(h1
(1 − p)h2
),
L2 = λ
hln
(1 + bhh2
1 + bhh1
)− d ln
(h2
h1
),
L3 = λ
hln
(1 + bhh2
1 + b(1 − p)hh2
)− d ln
(1
1 − p
).
(3.1)
hen we have the following lemma.
emma 1. For any 0 < (1 − p)h2 < h1 < min {h2, d/(λb − bdh)} and h2 < H∗, we have L1 < 0, L2 < 0 and L3 < 0.
roof. Let
f (x) = λ
hln
(1 + bhx
1 + bhh1
)− d ln
(x
h1
), x ∈ (0, ∞).
t is easy to see that f(h1) = f(H∗) = 0. To take the first derivative of f, we have
f ′(x) = (λb − bdh)x − d
x(1 + bhx).
hen f ′ (x) < 0 for x ∈ (0, d/(λb − bdh) and f ′ (x) > 0 for x ∈ (d/(λb − bdh), ∞). Hence we have f((1 − p)h2) > f(h1) = 0,.e., L1 < 0 and f(h2) < f(H∗) = 0, i.e., L2 < 0. In addition, we have L3 = L1 + L2 < 0. �
It can be easily shown that for any two points (x1, y1) and (x2, y2) on a trajectory of the continuous system of (2.1),here is
a ln
(y2
y1
)− b(y2 − y1) = λ
hln
(1 + bhx2
1 + bhx1
)− d ln
(x2
x1
). (3.2)
et T = − ln (1 − p)/a. For (k − 1)T < t ≤ kT(k = 1, 2, · · ·), denote{ξ(t) = (1 − p)h2 exp(a(t − (k − 1)T )),
η(t) = 0.(3.3)
hen we have
heorem 1. Suppose that the following condition
0 < μ = (1 − q)(1 − p)da
(1 + bhh2
1 + (1 − p)bhh2
)λ/ah< 1 (3.4)
olds. Then, the solution (ξ(t), η(t)) determined by Eq. (3.3) is a stable semi-trivial periodic solution of system with = 0.
roof. The proof can be found in [11], we therefore omit it here. �
heorem 2. For any p, q ∈ (0, 1) and h2 � d/(λb − bdh), system (2.1) does not have positive order-1 periodic solutionhen τ = 0.
roof. The proof is similar to that in Example 3, we therefore omit it here. �
heorem 3. For any p, q ∈ (0, 1) and h2 > d/(λb − bdh), if the following equation has a positive root between 0 and
/bu = −abW0
(−b(1 − q)u
aexp
(L3 − b(1 − q)u
a
)),

322 Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331
then system (2.1) has a positive order-1 periodic solution (ξ(t), η(t)), which is local orbitally asymptotically stable andenjoys the asymptotic phase property if∣∣∣∣ W0(Z)
1 + W0(Z)
a/b − (1 − q)η0
η0
∣∣∣∣ < 1,
where
Z = −b(1 − q)η0
aexp
(L3 − b(1 − q)η0
a
).
Proof. Suppose that p, q ∈ (0, 1) and h2 > d/(λb − bdh). For any point Bk(h2, yk) on∑
3 and 0 < yk < a/b, the trajectoryof system (2.1) starting from the point Bk intersects
∑1 and
∑3 at the points Ak+1((1 − p)h2, (1 − q)yk) and Bk+1(h2,
yk+1), respectively. From Eq. (3.2), the relation between Ak+1 and Bk+1 is
a ln
(yk+1
(1 − q)yk
)− b(yk+1 − (1 − q)yk) = λ
hln
(1 + bhh2
1 + bh(1 − p)h2
)− d ln
(1
1 − p
)or
−byk+1
aexp
(−byk+1
a
)= −b(1 − q)yk
aexp
(L3 − b(1 − q)yk
a
).
Since L3 < 0 and 0 < yk, yk+1 < a/b, we only need to consider the branch W0(z) of the Lambert W function. Thus, weobtain that
yk+1 = −abW0
(−b(1 − q)yk
aexp
(L3 − b(1 − q)yk
a
)):=P(q, yk). (3.5)
If the equation u = P(q, u) has a positive root η0 between 0 and a/b, i.e., η0 = P(q, η0), then the trajectory staring fromthe point A((1 − p)h2, (1 − q)η0) will intersect
∑3 at the point B(h2, η0) and then turn to the point A again due to
impulsive effects �x = (1 − p)x and �y = (1 − q)y. Therefore, system (2.1) has a positive order-1 periodic solution.By Eq. (3.5), for the periodic solution (ξ(t), η(t)) we have
η0 = P(q, η0) = −abW0
(−b(1 − q)η0
aexp
(L3 − b(1 − q)η0
a
)).
Denote
Z = −b(1 − q)η0
aexp
(L3 − b(1 − q)η0
a
).
Then we have
∂P(q, τ, σ, η0)
∂η0= − W0(Z)
1 + W0(Z)
a/b − (1 − q)η0
η0.
If ∣∣∣∣ W0(Z)
1 + W0(Z)
a/b − (1 − q)η0
η0
∣∣∣∣ < 1
holds, then there exist δ > 0, such that for any |yk − η0| < δ, we have | ∂ P(q, τ, σ, yk)/∂ yk| < 1. Thus, the solution (ξ(t),η(t)) is local orbitally asymptotically stable and which has asymptotic phase property. This completes the proof ofTheorem 3. �
4. Existence and stability of positive periodic solutions
In this subsection, the sufficient conditions for the existence and stability of positive periodic solutions are analyzed.

T
h
a
Pp
w
Bo
T
wah∑S
w
Bt
Ltdp
Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331 323
heorem 4. For any p ∈ (0, 1), h2 � min {H∗, d/((1 − p)(λb − bdh))} and (1 − p)h2 < h1 ≤ d/(λb − bdh), if
0 < τ ≤ −1
2
a
bW0
(− exp
(L1 − a
a
))=: τ0, 0 < σ ≤ bτ
aand q ≥ 1 − κ1/κ2
old, where
κ1 = −abW0
(−bσy
∗
aexp
(−L1 − bσy∗
a
))
κ2 = −abW0
(−b(σy∗ + τ)
aexp
(L2 − b(σy∗ + τ)
a
))
nd L1, L2 are defined in Eq. (3.1), then system (2.1) has a positive order-1 periodic solution.
roof. Let the trajectory O+(E, t0) of system (2.1) start from the initial point E((1 − p)h2, b/a) intersects∑
2 at theoint F (h1, y). Then, by Eq. (3.2), we can determine y from the following relation
a ln
(by
a
)− b
(y − a
b
)= λ
hln
(1 + bhh1
1 + (1 − p)bhh2
)− d ln
(h1
(1 − p)h2
),
hich can be rewritten as
−bya
exp
(−bya
)= − exp
(L1 − a
a
).
y Lemma 1 that L1 < 0, i.e., − exp (L1/a − 1) > − 1/e. Since −by/a > −1, we only need to consider the branch W0(z)f the Lambert W function. That is, we obtain that
y = −abW0
(− exp
(L1 − a
a
)). (4.1)
hus, for any (1 − p)h2 < h1 ≤ d/(λb − bdh) and
0 < τ ≤ −1
2
a
bW0
(− exp
(L1 − a
a
))=: τ0 and 0 < σ ≤ bτ
a,
e have σy∗ + τ = σa/b + τ < y, which implies that the trajectory O+1 (E, t0) of system (2.1) starting from E((1 − p)h2,
/b) passes through the point F (h1, y) and intersect∑
3 before reaching the line y = a/b at the point K(H∗, a/b) due to2 ≤ H∗, i.e., the trajectory O+(S, t0) staring from the point S((1 − p)h2, y) (y ∈ (0, b1/a12)) on
∑1 will intersect with
2 and∑
3 infinite times due to the impulsive effects.Suppose the trajectory O+(S1, t0) of system (2.1) starts from the initial point S1(h1, σy∗) intersects
∑3 at the point
2(h2, τ∗). Then, by Eq. (3.2), we can determine τ∗ from the following equation
a ln
(τ∗
σy∗
)− b(τ∗ − σy∗) = λ
hln
(1 + bhh2
1 + bhh1
)− d ln
(h2
h1
),
hich can be rewritten as
−bτ∗
aexp
(−bτ
∗
a
)= −bσy
∗
aexp
(L2 − bσy∗
a
).
y Lemma 1 that L2 < 0, i.e., −bσy∗/a exp (L2/a − bσy∗/a) > − 1/e. So, we only need to consider the branch W0(z) ofhe Lambert W function. That is, we obtain that
τ∗ = −abW0
(−bσy
∗
aexp
(L2 − bσy∗
a
)).
∑ ∗ +
et the point A1((1 − p)h2, α1) on 1, where 0 < α1 < (1 − q)τ is sufficient small. Suppose that the trajectory O (A1,0) of system (2.1) first interacts∑2 at the point B1(h1, β1) at the time t = t1, and then jumps to the point B+
1 (h1, β1 + τ)ue to the impulsive �x = 0, �y = τ. Since β1 + α > σy∗, then the trajectory O+(B+
1 , t1) intersects the section∑
3 at theoint C1(h2, γ1) at the time t = t2. Due to the impulsive effect �x = (1 − p)x and �y = (1 − q)y, the state jumps from

324 Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331
C1 to the point A2((1 − p)h2, α2) on∑
1, where α2 = (1 − q)γ1. Further, the trajectory O+(A2, t2) intersects∑
2 at thepoint B2(h1, β2) when t = t3, and then jumps to B+
2 (h1, β2 + τ). Further the trajectory O+(B+2 , t3) intersects the section∑
3 at the point C2(h2, γ2). By α1 < (1 − q)τ∗, β1 + τ > τ ≥ σy∗ and the geometrical construction of the phase space ofthe continuous system of (2.1), we obtain that the point A2 is above the point A1. Therefore, the point C2 is above thepoint C1. Hence, from Eq. (2.2) we have γ2 = P(q, α, γ1) and
γ1 − P(q, τ, σ, γ1) = γ1 − γ2 < 0. (4.2)
On the other hand, for any 0 < α < α0, the trajectory O+(E, t0) starts from the initial point E1((1 − p)h2, a/b) intersects∑2 at the point F (h1, y). Since y > σy∗, then the trajectory passes through F and intersects
∑3 at the point G(h2,
λ1) when t = t′. And then the state jumps from G to E1((1 − p)h2, (1 − q)λ1) on∑
1. Further, the trajectory O+(E1, t ′)intersects
∑2 at the point F1(h1, ϑ) when t = t′′. If ϑ ≥ τy∗, then ϑ < y, the trajectory passes through F1 and reaches∑
3 at the point G1(h2, λ2), where λ2 < λ1. Else ϑ < τy∗, then the state turns from F1(h1, ϑ) to F+1 (h1, ϑ + τ). Then the
trajectory O+(F+1 , t′′) intersects
∑3 at the point G1(h2, λ2), where λ2 < λ1 due to ϑ + τ < σy∗ + τ < y. Therefore,
from (2.2) we have
λ1 − P(q, τ, σ, λ1) = λ1 − λ2 > 0. (4.3)
In view of Eq. (4.2) and Eq. (4.3), it follows that the Poincaré map (2.2) has a fixed point, that is the system (2.1)has a positive periodic solution. Since q > 1 − κ1/κ2 holds, then we conclude that the periodic solution is order-1, thiscompletes the proof of Theorem 4. �
Theorem 5. Suppose that the conditions in Theorem 4 hold. Let (ξ(t), η(t)) be the order-1 periodic solution determinedin Theorem 4, which is starting from the initial point ((1 − p)h2, (1 − q)η0). If∣∣∣∣ W0(Z1)
1 + W0(Z1)
W0(Z2)
1 + W0(Z2)
[a/b − (ω(η0) + τ)][a/b − (1 − q)η0]
(ω(η0) + τ)η0
∣∣∣∣ < 1
holds, where η0 satisfies that
η0 = −abW0
(−b(ω(η0) + τ)
aexp
(L2 − b(ω(η0) + τ)
a
)),
ω(η0) = −abW0
(−b(1 − q)η0
aexp
(L1 − b(1 − q)η0
a
)),
and Z1, Z2 satisfy that
Z1 = −b(ω(η0) + τ)
aexp
(L2 − b(ω(η0) + τ)
a
)
Z2 = −b(1 − q)η0
aexp
(L1 − b(1 − q)η0
a
),
then (ξ(t), η(t)) is a local orbitally asymptotically stable and enjoys the asymptotic phase property; If∣∣∣∣ W0(Z)
1 + W0(Z)
a/b − (1 − q)η0
η0
∣∣∣∣ < 1
holds, where η0 satisfies that
η0 = −abW0
(−b(1 − q)η0
aexp
(L3 − b(1 − q)η0
a
)),
then (ξ(t), η(t)) is a local orbitally asymptotically stable and enjoys the asymptotic phase property.
Proof. Suppose that p, q ∈ (0, 1), h2 � d/(λb − bdh), 0 < τ < τ0 and 0 < σ < bτ/a. Then, according to Theorem 4, system
(2.1) has a order-1 periodic solution (ξ(t), η(t)). Next, we begin the analysis of the stability of the periodic solution(ξ(t), η(t)).Firstly, we discuss the case h2 � d/(λb − bdh). Then the order-1 periodic solution (ξ(t), η(t)) starting fromP0((1 − p)h2, (1 − q)η0) intersects
∑2 at P1(h1, η1), where η1 < σy∗, then the state jumps to P+
1 (h1, η1 + τ), further

teiy
o
So
N
o
S
F
T
w
D
N(
Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331 325
he trajectory intersects∑
3 at the point P2(h2, η0) and jumps to P0((1 − p)h2, (1 − q)η0) again due to the impulsiveffects. For any point Gk(h2, yk) on
∑3 and 0 < yk < a/b, the trajectory of system (2.1) starting from the point Gk
ntersects∑
1,∑
2 and∑
3 at the points Ek+1((1 − p)h2, (1 − q)yk), Fk+1(h1, y ′k+1), F+
k+1(h1, y′k+1 + τ) and Gk+1(h2,k+1), respectively. Then we have 0 < yk+1 = P(q, τ, σ, yk) < a/b. From Eq. (3.2), the relation between Ek+1 and Fk+1 is
a ln
(y′k+1
(1 − q)yk
)− b(y′k+1 − (1 − q)yk) = λ
hln
(1 + bhh1
1 + bh(1 − p)h2
)− d ln
(h1
(1 − p)h2
)r
−by′k+1
aexp
(−by′k+1
a
)= −b(1 − q)yk
aexp
(L1 − b(1 − q)yk
a
).
ince L1 < 0 and 0 < yk, y ′k+1 < a/b, we only need to consider the branch W0(z) of the Lambert W function. Thus, we
btain that
y′k+1 = −abW0
(−b(1 − q)yk
aexp
(L1 − b(1 − q)yk
a
)):=ω(yk) (4.4)
ext, we calculate the relation between the point F+k+1 and Gk+1. From Eq. (3.2), it follows that
a ln
(yk+1
y′k+1 + τ
)− b(yk+1 − (y′k+1 + τ)) = λ
hln
(1 + bhh2
1 + bhh1
)− d ln
(h2
h1
)r
−byk+1
aexp
(−byk+1
a
)= −b(1 − q)(y′k+1 + τ)
aexp
(L2 − b(1 − q)(y′k+1 + τ)
a
).
imilarly, we obtain that
yk+1 = −abW0
(−b(ω(yk) + τ)
aexp
(L2 − b(ω(yk) + τ)
a
)):=P(q, τ, σ, yk). (4.5)
or the order-1 periodic solution (ϕ(t), ψ(t)) starting from ((1 − p)h2, (1 − q)η0), η0 satisfies the following equation
η0 = P(q, τ, σ, η0) = −abW0
(−b(ω(η0) + τ)
aexp
(L2 − b(ω(η0) + τ)
a
)). (4.6)
ake the first derivative of the Poincaré map, i.e., Eq. (4.5) with respect to yk that
∂P(q, τ, σ, yk)
yk= aW0(Z1)
bZ1(1 + W0(Z1))
aW0(Z2)
bZ2(1 + W0(Z2))
∂Z1
∂ω(yk)
∂Z2
∂yk,
here
Z1(q, τ, yk) = −b(ω(yk) + τ)
aexp
(L2 − b(ω(yk) + τ)
a
),
Z2(q, τ, yk) = −b(1 − q)yka
exp
(L1 − b(1 − q)yk
a
).
enote
Z1 = −b(ω(η0) + τ)
aexp
(L2 − b(ω(η0) + τ)
a
),
Z2 = −b(1 − q)η0
aexp
(L1 − b(1 − q)η0
a
).
ote that (φ(t), ϕ(t)) is a positive order-1 periodic solution of system (2.1) which starts from the point ((1 − p)h2,
1 − q)η0), so η0 is a fixed point of P(q, τ, σ, yk). Therefore, we have∂P(q, τ, σ, η0)
∂η0= W0(Z1)
1 + W0(Z1)
W0(Z2)
1 + W0(Z2)
[a/b − (ω(η0) + τ)][a/b − (1 − q)η0]
(ω(η0) + τ)η0

326 Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331
where a/b > ω(η0) + τ > η0 > (1 − q)η0 > 0. If∣∣∣∣ W0(Z1)
1 + W0(Z1)
W0(Z2)
1 + W0(Z2)
[a/b − (ω(η0) + τ)][a/b − (1 − q)η0]
(ω(η0) + τ)η0
∣∣∣∣ < 1
holds, then there exist δ > 0, such that for any |yk − η0| < δ, we have | ∂ P(q, τ, σ, yk)/∂ yk| < 1. Thus, the solution (ξ(t),η(t)) is local orbitally asymptotically stable and which has asymptotic phase property.
Secondly, we discuss the case d/(λb − bdh) < h2 ≤ min {H∗, d/((1 − p)(λb − bdh))}. If η0 satisfies that
η0 = −abW0
(−b(ω(η0) + τ)
aexp
(L2 − b(ω(η0) + τ)
a
)),
ω(η0) = −abW0
(−b(1 − q)η0
aexp
(L1 − b(1 − q)η0
a
)),
then similar to the discussion in the former case, if∣∣∣∣ W0(Z1)
1 + W0(Z1)
W0(Z2)
1 + W0(Z2)
[a/b − (ω(η0) + τ)][a/b − (1 − q)η0]
(ω(η0) + τ)η0
∣∣∣∣ < 1
holds, where Z1, Z2 satisfy that
Z1 = −b(ω(η0) + τ)
aexp
(L2 − b(ω(η0) + τ)
a
)
Z2 = −b(1 − q)η0
aexp
(L1 − b(1 − q)η0
a
),
then (ξ(t), η(t)) is a local orbitally asymptotically stable and enjoys the asymptotic phase property; Else, η0 satisfiesthat
η0 = −abW0
(−b(1 − q)η0
aexp
(L3 − b(1 − q)η0
a
)).
In this case, the Poincaré map can be determined as
yk+1 = −abW0
(−b(1 − q)yk
aexp
(L3 − b(1 − q)yk
a
)):=P(q, τ, σ, yk).
Denote
Z = −b(1 − q)η0
aexp
(L3 − b(1 − q)η0
a
).
Then we have
∂P(q, τ, σ, η0)
∂η0= − W0(Z)
1 + W0(Z)
a/b − (1 − q)η0
η0.
If ∣∣∣∣ W0(Z)
1 + W0(Z)
a/b − (1 − q)η0
η0
∣∣∣∣ < 1
holds, then there exist δ > 0, such that for any |yk − η0| < δ, we have | ∂ P(q, τ, σ, yk)/∂ yk| < 1. Thus, the solution (ξ(t),η(t)) is local orbitally asymptotically stable and which has asymptotic phase property. This completes the proof ofTheorem 5. �

Ri
5
PpaO
E
h
FHwh
E
T(s
A
ev
A
EyGfiS
wh
Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331 327
emark 1. It should be noticed that the periodic solution (ξ(t), η(t)) is locally stable rather than globally stable. Thats, the solutions with different initial conditions may approach different states.
. Example, numerical simulation and discussion
In this paper, a class of predator–prey models with state dependent impulsive effects is put forward. By usingoincaré map and Lambert W function, the criteria for the existence and stability of semi-trivial solution and positiveeriodic solution of system (2.1) are given. In order to verify the validity of the main results, the following simulationsre carried out. In system (2.1), let a = 0.8, b = 0.6, λ = 0.5, d = 0.2, h = 0.02, τ ≥ 0, p, q ∈ (0, 1), and (1 − p)h2 < h1 < h2.bviously, system (2.1) without impulsive effects has a stable focus (0.672, 1.333).
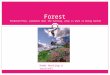
xample 1. Existence and stability of positive periodic solution with τ = 0.
In system (2.1), let p = 0.4, q = 0.3 and h2 = 0.6. It is easy to compute that T = 1.25 ln (5/3) 2. Then system (2.1)as the following semi-trivial periodic solution for (k − 1)T < t ≤ kT(k = 1, 2, · · ·),{
ξ(t) = 0.66 exp(0.8(t − (k − 1)T )),
η(t) = 0.(5.1)
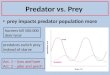
rom Fig. 1(a) it can be seen that system (2.1) has a stable semi-trivial periodic solution determined by Eq. (5.1).owever, if we choose p = 0.8, q = 0.05 and h2 = 1.75 in system (2.1), then the semi-trivial periodic solution is unstable,hich can be seen in Fig. 1 (b). Further, when we set p = 0.8, q = 0.13 and h2 = 1.75, then by Theorem 3, system (2.1)as a locally stable positive periodic solution, which can be seen in Fig. 1 (c).
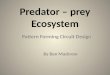
xample 2. Existence and stability of positive periodic solution with τ > 0.
In system (2.1), let p = 0.4, h1 = 0.45 and h2 = 0.6. According to Theorem 4, we set τ = 0.2, σ = 0.15 and q = 0.5.hen system (2.1) has a order-1 periodic solution, which can be seen in Fig. 2 (a) (for h2 < d/(λb − bdh)) and Fig. 2 (c)
for h2 > d/(λb − bdh)). When we set q = 0.3 < 1 − κ1/κ2, then according to Theorem 4, system (2.1) also has a periodicolution, it is not order-1 but order-2, which can be seen from Fig. 2 (b).
cknowledgements
We express our warmest thanks to Professor Robert Beauwens, Editor-in-Chief, for his useful suggestions. We alsoxpress our warmest thanks to the referees for their interest in our work and their value time to read the manuscriptery carefully and their valuable comments for improving the paper.
ppendix A.
The following two examples indicate that model (1.1) does not have any good dynamic properties.
xample 3. Suppose that p, q ∈ (0, 1), τ = 0 and h2 ≤ d/(λb − bdh). Let G(h2, η0) be a point on∑
3 � {(x, y) : x = h2, � 0}, where η0 < a/b. By the impulsive effect �x = − px and �y = − qy when x = h2 that the state is changed from0 to F0((1 − p)h2, (1 − q)η0) on
∑1 � {(x, y) : x = (1 − p)h2, y � 0}. Then the trajectory of system (1.1) starting
rom F intersects∑
3 at G1(h2, η1) and then jumps to F1((1 − p)h2, (1 − q)η1). Similarly, denote the kth (k ≥ 1))ntersecting point between the trajectory and
∑3 by Gk(h2, ηk) and the impulse point by Fk((1 − p)h2, (1 − q)ηk).
ince h2 ≤ d/(λb − bdh), then we have ηk ≤ ηk−1 ≤ · · · ≤ η0 < a/b, i.e.,
ηk ≤ (1 − q)ηk−1 ≤ (1 − q)2ηk−2 ≤ · · · ≤ (1 − q)kη0 < (1 − q)ka/b,
hich implies that ηk → 0 when k→ ∞. Therefore, for any p, q ∈ (0, 1) and h2 ≤ d/(λb − bdh), system (1.1) does notave positive order-1 periodic solution when τ = 0.

328 Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331
0.35 0.4 0.45 0.5 0.55 0.60
0.05
0.1
0.15
0.2
0.25a
b
c
x(t)
y(t
)
0.4 0.6 0.8 1 1.2 1.4 1.60.014
0.016
0.018
0.02
0.022
0.024
0.026
0.028
0.03
0.032
x(t)
y(t
)
0.4 0.6 0.8 1 1.2 1.4 1.60.23
0.24
0.25
0.26
0.27
0.28
x(t)
y(t
)
Fig. 1. The trajectory of system (2.1) with τ = 0: (a) p = 0.4, q = 0.3 and h2 = 0.6; (b) p = 0.8, q = 0.05 and h2 = 1.75; (c) p = 0.8, q = 0.13 and h2 = 1.75.
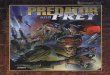
Example 4. For any initial point A, let O+(A, t0) be the trajectory of system (1.1) (i.e., system (1.1) in [11]). Here weanalyze two cases according to the values of xA and h1 for d/(λb − bdh) < h2 < H∗), as shown in Fig. 3.
Case a), xA ≤ h1. Denote the first interacting point between O+(A, t0) and the line x = h1 as B. Then, followed bythe third and fourth equations of system (1.1) that the amount of prey keeps at h1 and the amount of predator abruptly
turns to yB + τ, i.e., the state is changed from B into B1 by the impulsive effect. Since the amount of prey in the state B1is still h1, i.e., xB1 = h1, the third and fourth equations are active and the amount of prey keeps at h1 and the amount
Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331 329
0.35 0.4 0.45 0.5 0.55 0.6
0.2
0.25
0.3
0.35
0.4a
b
c
x(t)
y(t
)
0.35 0.4 0.45 0.5 0.55 0.6
0.15
0.2
0.25
0.3
0.35
0.4
x(t)
y(t
)
0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7
0.2
0.25
0.3
0.35
0.4
x(t)
y(t
)
Fig. 2. The trajectory of system (2.1) with τ = 0.2 and σ = 0.15: (a) p = 0.4, q = 0.5, h = 0.5 and h = 0.6; (b) p = 0.4, q = 0.3, h = 0.5 and h = 0.6;(
os
1 2 1 2
c) p = 0.4, q = 0.5, h1 = 0.5 and h2 = 0.75.
f predator abruptly turns to yB1 + τ = yB + 2τ, i.e., the state is turned from B1 into B2 by the impulsive effect. Ando on, the state Bk−1 is turned into Bk by the impulsive effect, i.e., xBk = h1 and yBk = yB + kτ. Therefore,
limk→∞
yBk = yB + limk→∞
τk = ∞.

330 Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331
[
[
[[
[[
[
[
Fig. 3. The trajectory of system (1.1) starting from A for d/(λb − bdh) ≤ h2 < H∗): (a) xA < h1; (b) h1 < xA < h2.
Case b), h1 < xA < h2. Similarly to the analysis of Case a), the trajectory O+(A, t0) first interacts the line x = h2 atB. Then followed by the fifth and sixth equations of system (1.1) that the state is turned from B to B1. The trajectoryO+(B1, tB1 ) first interacts the line x = h1 at the point C and then turns to C1 by the impulsive effect. And so on, thestate Ck−1 is turned into Ck by the impulsive effect, i.e., xCk = h1 and yCk = yC + kτ. Therefore,
limk→∞
yCk = yC + limk→∞
αk = ∞.
Followed by case a) and case b) that for any p, q ∈ (0, 1) and τ > 0, system (1.1) (i.e., system (1.1) in [11]) does nothave positive order-1 periodic solution.
For the case of h2 ≤ d/(λb − bdh), it can be easily shown in a similar way that for any p, q ∈ (0, 1) and τ > 0, system(1.1) (i.e., system (1.1) in [11]) does not have positive order-1 periodic solution.
References
[1] H.J. Barclay, Models for pest control using predator release, habitat management and pesticide release in combination, J. Appl. Ecol. 19 (1982)337–348.
[2] R.M. Corless, G.H. Gonnet, D.E.G. Hare, D.J. Jeffrey, D.E. Knuth, On the Lambert W function, Adv. Comput. Math. 5 (1996) 329–359.[3] A. Franceschetti, A. Pugliese, Threshold behaviour of a SIR epidemic model with age structure and immigration, J. Math. Biol. 57 (1) (2008)
1–27.[4] S. Gao, L. Chen, J.J. Nieto, A. Torres, Analysis of a delayed epidemic model with pulse vaccination and saturation incidence, Vaccine 24
(35–36) (2006) 6037–6045.[5] S. Gao, Y. Liu, J.J. Nieto, H. Andrade, Seasonality and mixed vaccination strategy in an epidemic model with vertical transmission, Math.
Comput. Simul. 81(9) (2011) 1855–1868.[6] G.R. Jiang, Q.S. Lu, Impulsive state feedback control of a predator–prey model, J. Comput. Appl. Math. 200 (2007) 193–207.[7] G.R. Jiang, Q.S. Lu, Complex dynamics of a Holling type II prey–predator system with state feedback control, Chaos Solitons Fractals 31
(2007) 448–461.[8] B. Liu, Z.D. Teng, L.S. Chen, Analysis of a predator–prey model with Holling II functional response concerning impulsive control strategy, J.
Comput. Appl. Math. 193 (2006) 347–362.[9] X.Z. Meng, L.S. Chen, Permanence and global stability in an impulsive Lotka–Volterra n-species competitive system with both discrete delays
and continuous delays, Int. J. Biomath. 1 (2008) 179–196.10] L.F. Nie, J.G. Peng, Z.D. Teng, L. Hu, Existence and stability of periodic solution of a Lotka–Volterra predator–prey model with state dependent
impulsive effects, J. Comput. Appl. Math. 224 (2009) 544–555.11] L.F. Nie, Z.D. Teng, L. Hu, J.G. Peng, Existence and stability of periodic solution of a predator–prey model with state-dependent impulsive
effects, Math. Comput. Simul. 79 (2009) 2122–2134.12] J.J. Nieto, D. O’Regan, Variational approach to impulsive differential equations, Nonlinear Anal. Real World Appl. 10 (2) (2009) 680–690.13] S.L. Sun, L.S. Chen, Permanence and complexity of the Eco-Epidemiological Model with impulsive perturbation, Int. J. Biomath. 1 (2008)
121–132.14] S.Y. Tang, L.S. Chen, Modelling and analysis of integrated pest management strategy, Discrete Contin. Dyn. Syst. Ser. B 4 (2004) 759–768.15] S.Y. Tang, R.A. Cheke, State-dependent impulsive models of integrated pest management (IPM) strategies and their dynamic consequences, J.
Math. Biol. 50 (2005) 257–292.16] S.Y. Tang, Y.N. Xiao, L.S. Chen, R.A. Cheke, Integrated pest management models and their dynamical behaviour, Bull. Math. Biol. 67 (2005)
115–135.17] A.J. Terry, Pulse vaccination strategies in a metapopulation SIR model, Math. Biosci. Eng. 7 (2) (2010) 455–477.

[
[
[
[
[
[
Y. Tian et al. / Mathematics and Computers in Simulation 82 (2011) 318–331 331
18] Y. Tian, K.B. Sun, L.S. Chen, Comment on “Existence and stability of periodic solution of a Lotka–Volterra predator–prey model with statedependent impulsive effects” [J. Comput. Appl. Math. 224 (2009) 544–555], J. Comput. Appl. Math. 234 (2010) 2916–2923.
19] J.C. Van Lenteren, Environmental manipulation advantageous to natural enemies of pests, in: V. Delucchi (Ed.), Integrated Pest Management,Parasitis, Geneva, 1987, pp. 123–166.
20] J.C. Van Lenteren, Integrated pest management in protected crops, in: D. Dent (Ed.), Integrated Pest Management, Chapman Hall, London,1995, pp. 311–320.
21] L. Wang, L. Chen, J.J. Nieto, The dynamics of an epidemic model for pest control with impulsive effect, Nonlinear Anal. Real World Appl. 11
(3) (2010) 1374–1386.22] W. Wang, J. Shen, J.J. Nieto, Permanence and periodic solution of predator–prey system with Holling type functional response and impulses,Discrete Dyn. Nat. Soc. (2007), doi:10.1155/2007/81756.
23] Y.N. Xiao, F. Van Den Bosch, The dynamics of an ecoepidemic model with biological control, Ecol. Modell. 168 (2003) 203–214.