Embed Size (px)
Citation preview

Applied Mathematics, 2015, 6, 1649-1664 Published Online August 2015 in SciRes. http://www.scirp.org/journal/am http://dx.doi.org/10.4236/am.2015.69147
How to cite this paper: Güvenilir, A.F., Kaymakçalan, B. and Pelen, N.N. (2015) Impulsive Predator-Prey Dynamic Systems with Beddington-DeAngelis Type Functional Response on the Unification of Discrete and Continuous Systems. Applied Ma-thematics, 6, 1649-1664. http://dx.doi.org/10.4236/am.2015.69147
Impulsive Predator-Prey Dynamic Systems with Beddington-DeAngelis Type Functional Response on the Unification of Discrete and Continuous Systems Ayşe Feza Güvenilir1, Billur Kaymakçalan2, Neslihan Nesliye Pelen3 1Department of Mathematics, Ankara University, Ankara, Turkey 2Department of Mathematics, Çankaya University, Ankara, Turkey 3Department of Mathematics, Ondokuz Mays University, Samsun, Turkey Email: [email protected], [email protected], [email protected] Received 27 July 2015; accepted 25 August 2015; published 28 August 2015
Copyright © 2015 by authors and Scientific Research Publishing Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). http://creativecommons.org/licenses/by/4.0/
Abstract In this study, the impulsive predator-prey dynamic systems on time scales calculus are studied. When the system has periodic solution is investigated, and three different conditions have been found, which are necessary for the periodic solution of the predator-prey dynamic systems with Beddington-DeAngelis type functional response. For this study the main tools are time scales cal-culus and coincidence degree theory. Also the findings are beneficial for continuous case, discrete case and the unification of both these cases. Additionally, unification of continuous and discrete case is a good example for the modeling of the life cycle of insects.
Keywords Time Scales Calculus, Predator-Prey Dynamic Systems, Periodic Solutions, Coincidence Degree Theory, Beddington-DeAngelis Type Functional Response
1. Introduction The relationships between species and the outer environment, and the connections between different species are the description of the predator-prey dynamic systems which is the subject of mathematical ecology in bioma-thematics. Various types of functional responses in predator-prey dynamic system such as Monod-type, semi-ratio- dependent and Holling-type have been studied. [1] is an example for the study about Holling-type functional re-

A. F. Güvenilir et al.
1650
sponse. In this paper, we consider the predator-prey system with Beddington DeAngelis type functional re-sponse and impulses. This type of functional response first appeared in [2] and [3]. At low densities this type of functional response can avoid some of the singular behavior of ratio-dependent models. Also predator feeding can be described much better over a range of predator-prey abundances by using this functional response.
In a periodic environment, significant problem in population growth model is the global existence and stabili-ty of a positive periodic solution. This plays a similar role as a globally stable equilibrium in an autonomous model. Therefore, it is important to consider under which conditions the resulting periodic nonautonomous sys-tem would have a positive periodic solution that is globally asymptotically stable. For nonautonomous case there are many studies about the existence of periodic solutions of predator-prey systems in continuous and discrete models based on the coincidence theory such as [4]-[12].
Impulsive dynamic systems are also important in this study and we try to give some information about this area. Impulsive differential equations are used for describing systems with short-term perturbations. Its theory is explained in [13]-[15] for continuous case and also for discerete case there are some studies such as [16]. Impul-sive differential equations are widely used in many different areas such as physics, ecology, and pest control. Most of them use impulses at fixed time such as [17] [18]. By using constant functions, some properties of the solution of predator-prey system with Beddington-DeAnglis type functional response and impulse impact are studied in [19] for continuous case.
In this study unification of continuous and discrete analysis is also significant. To unify the study of differen-tial and difference equations, the theory of Time Scales Calculus is initiated by Stephan Hilger. In [20] [21], un-ification of the existence of periodic solutions of population models modelled by ordinary differential equations and their discrete analogues in form of difference equations, and extension of these results to more general time scales are studied.
The unification of continuous and discrete case is a good example for the modeling of the life cycle of insects. Most of the insects have a continuous life cycle during the warm months of the year and die out in the cold months of the year, and in that period their eggs are incubating or dormant. These incubating eggs become new individuals of the new warm season. Since insects have such a continuous and discrete life cycle, we can see the importance of models obtained by the time scales calculus for the species that have unusual life cycle. Therefore, in this paper we try to generalize periodic solutions of predator-prey dynamic systems with Beddington-DeAn- glis type functional response and impulse to general time scales.
2. Preliminaries Below informations are from [20]. Let X, Z be normed vector spaces, :L DomL X Z⊂ → be a linear mapping,
:N X Z→ be a continuous mapping. The mapping L will be called a Fredholm mapping of index zero if dimKerL codimImL= < +∞ and ImL is closed in Z. If L is a Fredholm mapping of index zero and there exist continuous projections :P X X→ and :Q Z Z→ such that ImP KerL= , ( )ImL KerQ Im I Q= = − , then it follows that ( ):DomL KerPL I P X ImL− →
is invertible. We denote the inverse of that map by PK . If Ω is an open bounded subset of X, the mapping N will be called L-compact on Ω if ( )QN Ω is bounded and
( ) :PK I Q N X− Ω→ is compact. Since ImQ is isomorphic to KerL, there exists an isomorphism :J ImQ KerL→ . The above informations are important for the Continuation Theorem that we give below. Theorem 1. (Continuation Theorem). Let L be a Fredholm mapping of index zero and N be L-compact on Ω.
Suppose (a) For each ( )0,1λ ∈ , every solution z of Lz Nzλ= is such that z δ∉ Ω ; (b) 0QNz ≠ for each z KerLδ∈ Ω and the Brouwer degree , ,0 0.deg JQN KerLδΩ ≠ Then the
operator equation Lz Nz= has at least one solution lying in DomL δΩ . We will also give the following lemma, which is essential for this paper. Lemma 1. Let [ ]1 2, 0,t t ω∈ and t∈ . If :g T R→ is ω-periodic, then
( ) ( ) ( ) ( ) ( ) ( )1 20 0and .g t g t g s s g t g t g s s
ω ω∆ ∆≤ + ∆ ≥ − ∆∫ ∫
3. Main Result The equation that we investigate is:

A. F. Güvenilir et al.
1651
( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( )
( ) ( )( ) ( )( )
( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( )
expexp ,
exp exp
exp,
exp exp
ln 1
ln
k
k
k k
k k
c t y tx t a t b t x t t t
t t x t m t y t
f t x ty t d t t t
t t x t m t y t
x t g
y t p
α β
α β
∆
∆
= − − ≠+ +
= − + ≠+ +
∆ = +
∆ =
(1)
k q kt t w+ = + , ( ) ( )a t w a t+ = , ( ) ( )b t w b t+ = , ( ) ( )c t w c t+ = , ( ) ( )d t w d t+ = , ( ) ( )f t w f t+ = , ( ) ( ) ( ) ( ),t w t t w tα α β β+ = + = , ( ) ( ) ,m t w m t+ = ,1 1,kk g∀ > > − and 0.kp > Here is periodic, i.e
if t∈ then ,t w+ ∈ and ( )0
0wa t t∆ >∫ , ( )
00,
wb t t∆ >∫ ( )
00
wd t t∆ >∫ [ ] ( )0,minl
t w tβ β∈= ,
[ ] ( )0,minlt wm m t∈= , [ ] ( )0,maxu
t w tβ β∈= , [ ] ( )0,max ,ut wm m t∈= ( ) 0m t > and ( ) ( ), 0,c t f t > ( ) ( ), 0,b t tα ≥
( ) 0.tβ > Each functions are from ( ), .rdC
Lemma 2. If ( ) ( )10ln 1 0
w qiia t t g
=∆ + + <∏∫ and ( ) ( )
( )10 0ln 0,
w wqii
f td t t p t
tβ=− ∆ + + ∆ <∏∫ ∫ then all positive
solutions ( )( ) ( )( )( )exp ,expx t y t are tends to 0 as t tends to infinity.
Proof. If we using the first equation of (1) we obtain,
( )( ) ( )( ) ( ) ( )( )0exp exp 0 1 exp
ti
ti tx t x g a s s
<
≤ + ∆∏ ∫
Since ( ) ( )10ln 1 0.
w qiia t t g
=∆ + + <∏∫ Hence ( )( )lim exp 0.t x t→∞ =
Similarly ( )( )lim exp 0.t y t→∞ = Theorem 2. In addition to conditions on coefficient functions If
( ) ( ) ( )( )10 0
ln 1 0w wq
ii
c ta t t g t
m t=∆ + + − ∆ >∏∫ ∫
and
( ) ( ) ( )( )
( )( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
0 01
0 01
0
0 0 01 1
ln 1exp ln 1
ln ln 0
qw wi qw wi
iwi
q qw w wu ui i
i i
c ta t t g t
m ta t t a t t g
b t t
f t t d t t p d t t pβ α
=
=
= =
∆ + + − ∆ − ∆ + ∆ + + ∆
⋅ ∆ − ∆ − − ∆ − >
∏∫ ∫∏∫ ∫
∫
∏ ∏∫ ∫ ∫
then there exist at least a w-periodic solution.
Proof. ( ) ( ) ( ) ( ) ( )2: , : ,u
X PC u t w u t v t w v tv
= ∈ + = + =
with the norm:
[ ] ( ) ( )( )0,sup ,t w
uu t v t
v ∈
=
and
( ) ( ) ( ) ( ) ( ) ( )1 2 2
1
q
aauY PC u t w u t v t w v t
bbv
= ∈ × + = + =

A. F. Güvenilir et al.
1652
with the norm:
[ ]
1 1
0,1 1
, , , sup , , , .q q
t wq q
a aa au ub bb bv v∈
=
Let us define the mappings L and N by :L DomL X Y⊂ → such that
( )( )
( )( )
1
1
, , ,q
q
u tu tu uL
v tv v v t
∆
∆
∆∆ = ∆ ∆
and :N X Y→ such that
( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( )
( )( ) ( )( )
( ) ( ) ( )( ) ( ) ( )( )
( )( )
( )( )
1
1
expexp
ln 1exp exp ln 1, , , .
lnexp lnexp exp
q
q
c t v ta t b t u t
gt t u t m t v t guN
pv f t u t pd t
t t u t m t v t
α β
α β
− − ++ + + = − + + +
Then 1
2
:cu u
KerLcv v
= =
, 1c and 2c are constants.
( )
( )
011
10
1
0, , , : .
0
qwi
q iqwq
ii
u s s aaauImL
bbvv s s b
=
=
∆ + = = ∆ +
∑∫
∑∫
ImL is closed in Y and 2dimKerL codimImL= = , therefore L is a Fredholm mapping of index zero. There exist continuous projectors :P X X→ and :Q Y Y→ such that
( )( )
( )0
0
1)
w
w
u s suP
v mes w v s s
∆ = ∆
∫
∫
and
( )
( )
( )
011
10
1
0 01, , , , , , ,0 0
qwi
q iqwq
ii
u s s aaauQ
bbv mes wv s s b
=
=
∆ + = ∆ +
∑∫
∑∫
where ( )01 .t
mes t t= ∆∫ The generalized inverse PK ImL DomL KerP= → ⊂ is given,
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
0 0 01 11
10 0 0
1 1
1 1
, , , .1 1
i
i
q qt w ti i i i
t t i iqP q qt w tq
i i i it t i i
u s s a u s s t a a mes tmes w mes waau
Kbbv
v s s b v s s t b b mes tmes w mes w
> = =
> = =
∆ + − ∆ ∆ − + = ∆ + − ∆ ∆ − +
∑ ∑ ∑∫ ∫ ∫
∑ ∑ ∑∫ ∫ ∫
( )
( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )
( )( ) ( )( )
( ) ( ) ( )( ) ( ) ( )( ) ( )
01
01
expexp ln 1
exp exp 01 , , .0exp
lnexp exp
qwi
i
qwi
i
c s v sa s b s u s s g
s s u s m s v suQN
v mes w f s u sd s s p
s s u s m s v s
α β
α β
=
=
− − ∆ + +
+ + =
− + ∆ + + +
∏∫
∏∫

A. F. Güvenilir et al.
1653
Let
( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) 1
expexp ,
exp expc t v t
a t b t u t Nt t u t m t v tα β
− − =+ +
( )( ) ( )( )
( ) ( ) ( )( ) ( ) ( )( ) 2
exp,
exp expf t u t
d t Nt t u t m t v tα β
− + =+ +
( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) 10
exp1 exp ,exp exp
w c s v sa s b s u s s N
mes w s s u s m s v sα β− − ∆ =
+ +∫
and
( ) ( )( ) ( )( )
( ) ( ) ( )( ) ( ) ( )( ) 20
exp1 .exp exp
w f s u sd s s N
mes w s s u s m s v sα β− + ∆ =
+ +∫
( ) ( )( )
( )( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
11 1
12 2
1 1 1 10 0 011
2 2 20 0 0
ln 1ln 1, , ,
ln ln
1 1ln 1 ln 1 ln 1
1ln
i
i
qP P
q
q qt w ti i i i
it t i
t w ti
t t
ggu N NK I Q N K
pv N N p
N s N s s g N s N s s t g g tmes w mes w
N s N s s p Nmes w
=> =
>
+ + − − = −
− ∆ + + − − ∆ ∆ − + + +
=− ∆ + −
∑∏ ∏∫ ∫ ∫
∏∫ ∫ ∫
( ) ( ) ( ) ( )211
.1ln ln
q q
i i iii
s N s s t p p tmes w ==
− ∆ ∆ − +
∑∏
Clearly, QN and ( )PK I Q N− are continuous. Since X and Y are Banach spaces, then by using Arzela- Ascoli theorem we can find ( ) ( )PK I Q N− Ω is compact for any open bounded set .XΩ ⊂ Addition-
ally, ( )QN Ω is bounded. Thus, N is L-compact on Ω with any open bounded set .XΩ ⊂ To apply the continuation theorem we investigate the below operator equation.
( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( )
( ) ( )( ) ( )( )
( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( )
expexp ,
exp exp
exp,
exp exp
ln 1
ln
k
k
k k
k k
c t y tx t a t b t x t t t
t t x t m t y t
f t x ty t d t t t
t t x t m t y t
x t g
y t p
λα β
λα β
λ
λ
∆
∆
= − − ≠
+ +
= − + ≠ + +
∆ = +
∆ =
(2)
Let x
Xy
∈
be any solution of system (2). Integrating both sides of system (2) over the interval [ ]0, w we
obtain,
( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( )
( ) ( )( ) ( )( )
( ) ( ) ( )( ) ( ) ( )( )
0 01
0 01
expln 1 exp ,
exp exp
expln ,
exp exp
qw wi
i
qw wi
i
c t y ta t t g b t x t t
t t x t m t y t
f t x td t t p t
t t x t m t y t
α β
α β
=
=
∆ + + = + ∆
+ + ∆ − = ∆ + +
∏∫ ∫
∏∫ ∫ (3)
From (2) and (3) we get

A. F. Güvenilir et al.
1654
( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( )
( ) ( ) ( )
0 0 0
10 01
expexp
exp exp
ln 1 ;
w w w
qw wi
i
c t y tx t t a t t b t x t t
t t x t m t y t
a t t a t t g M
λα β
λ
∆
=
∆ ≤ ∆ + + ∆
+ +
≤ ∆ + ∆ + + ≤
∫ ∫ ∫
∏∫ ∫ (4)
where ( ) ( ) ( )1 0 01
: ln 1 .qw w
ii
M a t t a t t g=
= ∆ + ∆ + +∏∫ ∫
( ) ( )( ) ( )( )
( ) ( ) ( )( ) ( ) ( )( )
( ) ( )
0 0 0
20 01
expexp exp
ln ;
w w w
qw wi
i
f t x ty t t d t t t
t t x t m t y t
d t t d t t p M
λα β
λ
∆
=
∆ ≤ ∆ + ∆
+ +
≤ ∆ + ∆ − ≤
∫ ∫ ∫
∏∫ ∫ (5)
where ( ) ( )2 0 01
: ln .qw w
ii
M d t t d t t p=
= ∆ + ∆ − ∏∫ ∫
Note that since x
Xy
∈
and there are q impulses which are constant, then there exist ,i iη ξ , 1, 2i = such
that
( ) [ ] ( ) ( ] ( ) ( ( ) ( ) [ ] ( ) ( ] ( ) ( ( )
1 1 2
1 1 2
1 0, , ,
1 0, , ,
min inf , inf , , inf
max sup ,sup , ,sup
q
q
t t t t t t t w
t t t t t t t w
x x t x t x t
x x t x t x t
ξ
η
∈ ∈ ∈
∈ ∈ ∈
=
=
(6)
( ) [ ] ( ) ( ] ( ) ( ( ) ( ) [ ] ( ) ( ] ( ) ( ( )
1 1 2
1 1 2
2 0, , ,
2 0, , ,
min inf , inf , , inf
max sup ,sup , ,sup
q
q
t t t t t t t w
t t t t t t t w
y y t y t y t
y y t y t y t
ξ
η
∈ ∈ ∈
∈ ∈ ∈
=
=
(7)
By the second equation of (3) and (6) and the first assumption of Theorem 2, we have
( ) ( ) ( ) ( )( ) ( )( )
( )( ) ( ) ( )( )
10 01
1 0 0
ln 1 exp
exp
qw wi
i
w w
c ta t t g b t x t
m t
c tx b t t t
m t
η
η
=
∆ + + ≤ + ∆
= ∆ + ∆
∏∫ ∫
∫ ∫
and ( )1 1;x lη ≥ where ( ) ( ) ( )
( )( )
10 0
1
0
ln 1: ln .
w wqii
w
c ta t t g t
m tl
b t t
=
∆ + + − ∆
= ∆
∏∫ ∫
∫
Using the second inequality in Lemma 1 we have
( ) ( ) ( )
( ) ( ) ( ) ( )
1 0
1 0 01
1 1 1
ln 1
: .
w
qw wi
i
x t x x t t
x a t t a t t g
H l M
η
η
∆
=
≥ − ∆
≥ − ∆ + ∆ + +
≥ = −
∫
∏∫ ∫ (8)
By the first equation of (3) and (6) we get ( )1 2 ,x lξ ≤ where

A. F. Güvenilir et al.
1655
( ) ( )( )
102
0
ln 1: ln .
w qii
w
a t t gl
b t t=
∆ + + = ∆
∏∫∫
using the first inequality in Lemma 1 and (4), we have
( ) ( ) ( )
( ) ( ) ( ) ( )
1 0
1 0 01
2 2 1
ln 1
: .
w
qw wi
i
x t x x t t
x a t t a t t g
H l M
ξ
ξ
∆
=
≤ + ∆
≤ + ∆ + ∆ + +
≤ = +
∫
∏∫ ∫ (9)
By (8) and (9) [ ] ( ) 1 1 20,max : max , .t w x t B H H∈ ≤ = Using (9), second equation of (3) and first equation
of (7), we can derive that
( ) ( )( ) ( )( )( )( ) ( )( )
( )( )( ) ( )( ) ( )
2 2
2 2
0 01
0 02 2
expln
exp exp
e ee exp e exp
qw wi l l
i
H Hw w
H Hl l l l
f t x td t t p t
x t m y t
f tt f t t
m y m y
β
β ξ β ξ
=
∆ − ≤ ∆+
≤ ∆ = ∆+ +
∏∫ ∫
∫ ∫
Therefore
( )( )( )
( ) ( )
2
202
01
e1exp eln
wHHl
l qwi
i
f t ty
m d t t pξ β
=
∆ ≤ −
∆ −
∫
∏∫
By the assumption of the theorem we can show that
( ) ( ) ( )( )10 0ln 0
w w qliif t t d t t pβ
=∆ − ∆ − >∏∫ ∫ and ( )2 1y Lξ ≤
where ( )
( ) ( )
2
201
10
e1: ln e .ln
wHHl
l w qii
f t tL
m d t t pβ
=
∆ = − ∆ −
∫∏∫
Hence, by using the first inequality in Lemma 1 and the second equation of (3),
( ) ( ) ( )
( ) ( ) ( ) ( )
2 0
2 0 01
3 1 2
ln
: .
w
qw wi
i
y t y y t t
y d t t d t t p
H L M
ξ
ξ
∆
=
≤ + ∆
≤ + ∆ + ∆ −
≤ = +
∫
∏∫ ∫ (10)
We can also derive from the second equation of (3) that
( ) ( )( ) ( )( )
( )( ) ( )( )( )
( )( ) ( )( ) ( )1 1
1 1
0 01
0 02 2
expln
exp exp
e ee exp e exp
qw wi u u u
i
H Hw w
H Hu u u u u u
f t x td t t p t
x t m y t
f tt f t t
m y m y
α β
α β η α β η
=
∆ − ≥ ∆+ +
≥ ∆ = ∆+ + + +
∏∫ ∫
∫ ∫

A. F. Güvenilir et al.
1656
( )( )( )
( ) ( )
1
102
01
e1exp e .ln
wHHu u
u qwi
i
f t ty
m d t t pη β α
=
∆ ≥ − −
∆ −
∫
∏∫
Again using second assumption of Theorem 2 we obtain
( ) ( ) ( ) ( ) ( )10 0 0
1 1e ln ln 0
q qw w wH u ui i
i if t t d t t p d t t pβ α
= =
∆ − ∆ − − ∆ − >
∏ ∏∫ ∫ ∫
and ( )2 2y Lη ≥ where ( )
( ) ( )
1
102
10
e1: ln e .ln
wHHu u
u w qii
f t tL
m d t t pβ α
=
∆ = − − ∆ −
∫∏∫
By using the second inequality in Lemma 1 and (5), we obtain
( ) ( ) ( )
( ) ( ) ( ) ( )
2 0
2 0 01
4 2 2
ln
: .
w
qw wi
i
y t y y t t
y d t t d t t p
H L M
η
η
∆
=
≥ − ∆
≥ − ∆ + ∆ −
≥ = −
∫
∏∫ ∫ (11)
By (10) and (11) we have [ ] ( ) 2 3 40,max : max , .t w y t B H H∈ ≤ = Obviously, 1B and 2B are both inde-
pendent of λ . Let 1 2 1M B B= + + . Then [ ]0,max .t w
xM
y∈
<
Let :
x xX M
y y Ω = ∈ <
and Ω
verifies the requirement (a) in Theorem 1. When x
KerLy
∈ ∂Ω
, xy
is a constant with ,x
My
=
then
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )
01
01
expexp ln 1
exp exp 0, ,
0expln
exp exp
0 0, , .
0 0
qwi
i
qwi
i
c s ya s b s x s g
s s x m s yxQN
y f s xd s s p
s s x m s y
α β
α β
=
=
− − ∆ + + + + = − + ∆ + + +
≠
∏∫
∏∫
( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )
( )( ) ( )( )
( ) ( ) ( )( ) ( ) ( )( ) ( )
01
01
expexp ln 1
exp exp,
expln
exp exp
qwi
i
qwi
i
c s y sa s b s x s s g
s s x s m s y sxJQN
y f s x sd s s p
s s x s m s y s
α β
α β
=
=
− − ∆ + +
+ + =
− + ∆ + + +
∏∫
∏∫
where :J ImQ KerL→ such that 0 0
, , , .0 0
x xJ
y y
=
Define the homotopy ( ) ( )1H JQN Gν ν ν= + − where
( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )
01
01
exp ln 1
expln
exp exp
qwi
i
qwi
i
a s b s x s gx
Gf s xy
d s s ps s x m s yα β
=
=
− ∆ + + = − ∆ +
+ +
∏∫
∏∫

A. F. Güvenilir et al.
1657
Take GDJ as the determinant of the jacobian of G. Since x
KerLy
∈
, then jacobian of G is
( )
( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( )( ) ( )
( ) ( ) ( )( )
02
2 20 0 0
e 0
.ee e ee e e e e e
wx
xx x yw w w
x y x y x y
b s s
f s sf s f s m ss s s
s s m s s s m s s s m s
β
α β α β α β
− ∆
− ∆ + ∆ − ∆ + + + + + +
∫
∫ ∫ ∫
All the functions in jacobian of G is positive then GsignDJ is always positive. Hence
( ) ( )1 0
0
, ,0 , ,0 0.Gx
Gy
xdeg JQN KerL deg G KerL signDJ
y−
∈
Ω = Ω = ≠
∑
Thus all the conditions of Theorem 1 are satisfied. Therefore system (1) has at least a positive w-periodic so-lution.
Theorem 3. If same conditions are valid for the coefficient functions in system (1) and
( ) ( )
( )( ) ( )
( ) ( ) ( ) ( ) ( )
01
01
0
0 0 01 1
ln 1exp 2 ln 1
ln ln 0
qwi qwi
iwi
q qw w wu ui i
i i
a t t ga t t g
b t t
f t t d t t p d t t pβ α
=
=
= =
∆ + + − ∆ + + ∆
⋅ ∆ − ∆ − − ∆ − >
∏∫∏∫
∫
∏ ∏∫ ∫ ∫
is satisfied then there exist at least a w-periodic solution. Proof. First part of the proof is very similar with the proof of Theorem 2. By (2), (3) and (6)
( ) ( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )( ) ( )
( )10 0 01
expln exp
exp exp
qw w wi
i
f t x t f td t t p t x t
tt t x t m t y tη
αα β=
∆ − = ∆ ≤ ∆+ +∏∫ ∫ ∫
By (3) ( ) ( )10ln 0.
w qiid t t p
=∆ − >∏∫ Also by the assumption of Theorem 3 ( ) ( ), 0.f t tα > Then we get
( )1 1,x lη ≥ ( ) ( )
( ) ( )10
1
0
ln: ln
w qii
w
d t t pl
f t t tα=
∆ − = ∆
∏∫∫
.
And using the second inequality in Lemma 1 we have
( ) ( ) ( )
( ) ( ) ( ) ( )
1 0
1 0 01
1 1 1
ln 1
: .
w
qw wi
i
x t x x t t
x a t t a t t g
H l M
η
η
∆
=
≥ − ∆
≥ − ∆ + ∆ + +
= = −
∫
∏∫ ∫
(12)
By the first equation of (3) and (6)
( ) ( ) ( ) ( )( ) ( )( ) ( )1 10 0 01
ln 1 exp exp .qw w w
ii
a t t g b t x t x b t tξ ξ=
∆ + + ≥ ∆ = ∆∏∫ ∫ ∫
Then we get ( )1 2x lξ ≤ where ( ) ( )
( )10
2
0
ln 1: ln .
w qii
w
a t t gl
b t t=
∆ + + = ∆
∏∫∫

A. F. Güvenilir et al.
1658
Using the first inequality in Lemma 1 we have
( ) ( ) ( )
( ) ( ) ( ) ( )
1 0
1 0 01
2 2 1
ln 1
: .
w
qw wi
i
x t x x t t
x a t t a t t g
H l M
ξ
ξ
∆
=
≤ + ∆
≤ + ∆ + ∆ + +
≤ = +
∫
∏∫ ∫
(13)
By (12) and (13) [ ] ( ) 1 1 20,max : max , .t w x t B H H∈ ≤ = From the second equation of (3) and the second equation of (7), we can derive that
( ) ( ) ( ) ( )( )( ) ( )( )
( )( ) ( )( )
( )( ) ( ) ( )
2
2
0 0 01 2
02
exp eln
exp exp
e .exp
Hqw w wi
i
H w
f t x t f td t t p t t
m t y t m t y
f t m t ty
ξ
ξ
=
∆ − ≤ ∆ ≤ ∆
= ∆
∏∫ ∫ ∫
∫
Therefore
( )( )( ) ( )
( ) ( )2 0
2
01
exp e (ln
w
Hqw
ii
f t m t ty
d t t pξ
=
∆≤
∆ −
∫∏∫
Since ( ) ( )2e , , 0,H f t m t > then ( )2 1,y Lξ ≤ where
( ) ( )( ) ( )
2 01
10
: ln e .ln
w
Hw q
ii
f t m t tL
d t t p=
∆ = ∆ −
∫∏∫
Hence, by using the first inequality in Lemma 1 and the second equation of (3),
( ) ( ) ( )
( ) ( ) ( ) ( )
2 0
2 0 01
3 1 2
ln
: .
w
qw wi
i
y t y y t t
y d t t d t t p
H L M
ξ
ξ
∆
=
≤ + ∆
≤ + ∆ + ∆ −
≤ = +
∫
∏∫ ∫
(14)
By the assumption of Theorem 3 there exists 0n such that 0n n∀ ≥
( ) ( )
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
01
0 01
0 0
0 0 01 1
ln 1exp ln 1
1
ln ln 0
qwi qw wi
iw wi
q qw w wu ui i
i i
a t t ga t t a t t g
b t t n c t t t
f t t d t t p d t t p
α
β α
=
=
= =
∆ + + − ∆ + ∆ + + ∆ + ∆
⋅ ∆ − ∆ − − ∆ − >
∏∫∏∫ ∫
∫ ∫
∏ ∏∫ ∫ ∫
is true. We need to get 4H such that [ ]0,t w∀ ∈ ( ) 4 .y t H≥ Let us assume there exists [ ], 0,t s w∈ such that ( ) ( ) ( )0lny s x t n≥ − Then by using (6) and (7) we obtain
( ) ( ) ( ) ( ) ( ) ( ) ( ) 12 0 1 0 1 0 4ln ln ln : .y y s x t n x n H n Mη ξ≥ ≥ − ≥ − ≥ − =
If such t, s does not exists then [ ], 0, ,t s w∀ ∈ ( ) ( ) ( )0lny s x t n< − . Also from the first equation of (3), we have

A. F. Güvenilir et al.
1659
( ) ( ) ( )( ) ( ) ( )( ) ( )( )
( )( ) ( ) ( ) ( )( )
1 20 0 01
1 00 0
ln 1 exp exp
exp 1 .
qw w wi
i
w w
c ta t t g x b t t y t
t
c tx b t t n t
t
η ηα
ηα
=
∆ + + ≤ ∆ + ∆
≤ ∆ + ∆
∏∫ ∫ ∫
∫ ∫
By using first inequality in Lemma 1, we have ( )( )exp x t K≥ , where
( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )0
10 0
100 0
ln 1: exp ln 1 .
1
qwi qw wi
iw w i
a t t gK a t t a t t g
c tb t t n t
tα
=
=
∆ + +
= − ∆ + ∆ + + ∆ + ∆
∏∫∏∫ ∫
∫ ∫
Using the second equality in (3) and the assumption of the Theorem 4, we obtain
( ) ( )( )( ) ( )
0 01 2
ln .exp
qw wi u u u
i
Kd t t p f t tK m yα β η=
∆ − ≥ ∆+ +∏∫ ∫
This implies ( ) 22 4 ,y Mη ≥ where
( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( )
02 14 0 0
100 0
0 0 01 1
01
ln 1: ln exp ln 1
1
ln ln
ln ln
qwi qw wi
iw wi
q qw w wu ui i
i i
qwu
i
a t t gM a t t a t t g
b t t n c t t t
f t t d t t p d t t p
m d t t p
α
β α
=
=
= =
=
∆ + + = − ∆ + ∆ + + ∆ + ∆
⋅ ∆ − ∆ − − ∆ −
− ∆ −
∏∫∏∫ ∫
∫ ∫
∏ ∏∫ ∫ ∫
∏∫ ( ) .i
Hence, according to the above discussion we have ( ) 1 22 4 4 4: min , .y M M Mη ≥ = Using second inequality
in Lemma 1 we have ( ) 4y t H≤ where ( ) ( ) ( )( )4 4 10 0: ln .
w w qiiH M d t t d t t p
== − ∆ + ∆ − ∏∫ ∫
Thus [ ] ( ) 2 3 40,max : max , .t w y t B H H∈ ≤ =
Obviously, 1B and 2B are both independent of λ . Let
1 2 1M B B= + + . Then [ ]0,max .t w
xM
y∈
<
Let :
x xX M
y y Ω = ∈ <
then Ω verifies the requirement
(a) in Theorem 1. Rest of the proof is similar to Theorem 2. Let there are two insect populations (one of them the predator, the other one the prey) both continuous while
in season (say during the six warm months of the year), die out in (say) winter, while their eggs are incubating or dormant, and then both hatch in a new season, both of them giving rise to nonoverlapping populations. This sit-uation can be modelled using the time scale
[ ]2 ,2 1 , with 1k
k k ω∈
= + =
Here impulsive effect of the pest population density is after its partial destruction by catching, poisoning with chemicals used in agriculture (can be shown by 1 0kg− < < ) and impulsive increase of the predator population density is by artificially breeding the species or releasing some species ( )0kp > . In addition to these, if the model assumes a BeddingtonDeAngelis functional response as in (1) and if the assumptions in Theorem 2 or 3

A. F. Güvenilir et al.
1660
are satisfied then there exists a 1-periodic solution of (1). Corollary 1. If ( ) 0tα = in the system (1) and
( ) ( ) ( )( )10 0ln 0
w w quiif t t d t t pβ
=∆ − ∆ − >∏∫ ∫
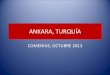
is satisfied then the system (1) has at least one w-periodic solution. Example 1. [ ]2 ,2 1 ,k k k= + ∈ k start with 0.
( ) ( )( ) ( )( ) ( )( )( ) ( )
( )( ) ( )( ) ( ) ( )
( ) ( )( ) ( )( ) ( )( )( ) ( )( ) ( ) ( )
( ) ( )( ) ( )
0.2sin 2π 0.3 0.2sin 2π 0.2 exp
0.1 0.1cos 2π exp,
0.5sin 2π 0.7 1 0.5cos 2π exp exp
4cos 2π 6.5 exp0.3sin 2π 1 ,
0.5sin 2π 0.7 1 0.5cos 2π exp exp
ln 1
ln
k
k
k k
k k
x t t t x
t yt t
t t x y
t xy t t t t
t t x y
x t g
y t p
∆
∆
= + − +
+− ≠
+ + + +
+= − + + ≠
+ + + +
∆ = +
∆ =
Impulse points: 1 2 1 4t k= + , 2 2 3 4t k= + and 2q = . 0.01
1 e 1g −= − , 0.012 e 1g −= −
0.11 ep = , 0.1
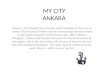
2 ep = Example 1 satisfies all the conditions of Theorem 2, thus it has at least one periodic solution. Example 2. [ ]2 ,2 1 ,k k k= + ∈ k start with 0.
( ) ( )( ) ( )( ) ( )( ) ( )
( )( ) ( )( ) ( ) ( )
( ) ( )( ) ( )( ) ( )( )( ) ( )( ) ( ) ( )
( ) ( )( ) ( )
0.2sin 2π 0.3 0.1sin 2π 0.2 exp
(3 cos 2π ) exp,
sin 2π 2 1 0.5cos 2π exp 1.5exp
4cos 2π 6.5 exp0.3sin 2π 1 ,
sin 2π 2 1 0.5cos 2π exp 1.5exp
ln 1
ln
k
k
k k
k k
x t t t x
t yt t
t t x y
t xy t t t t
t t x y
x t g
y t p
∆
∆
= + − +
+− ≠
+ + + +
+= − + + ≠
+ + + +
∆ = +
∆ =
Impulse points: 1 2 1 4t k= + , 2 2 3 4t k= + and 2q = . 0.01
1 e 1g −= − , 0.012 e 1g −= −
0.11 ep = , 0.1
2 ep = Example 2 satisfies all the conditions of Theorem 3, thus it has at least one periodic solution. Theorem 4. If all the coefficient functions in system (1) is positive, w-periodic, from ( )2,rdC and im-
pulses are 0; also
( )( )( )( )( )( ) ( )( )( ) ( )( )0 0 0
exp exp
0
ll u u l u u l
u
w w wu u
a a b a b a c mb
f t t d t t d t t
µ µ
β α
− −
⋅ ∆ − ∆ − ∆ >∫ ∫ ∫
is satisfied then there exist at least a w-periodic solution. [ ] ( )0,max w tµ µ=
Proof. First part of the proof is similar to Theorem 2, only difference is the zero impulses. If the assumption of Theorem 4 is true then there exists 0n such that for all 0n n≥

A. F. Güvenilir et al.
1661
( ) ( )( )( )( )( )( ) ( )( )( ) ( )( )
0
0 0 0
1 exp exp
0
l ul u u l u u l
u l
w w wu u
a cn a b a b a c mb a
f t t d t t d t t
µ µ
β α
+ − −
⋅ ∆ − ∆ − ∆ >∫ ∫ ∫
is satisfied. Suppose there exist [ ], 0,s t w∈ such that ( ) ( ) ( )0lny s x t n≥ − . Then similar to proof of Theorem 4 we can find 1
4M . If such s, t does not exist ( ) ( ) ( )0lny s x t n< − . Using the first equation of (1) and assuming ( )tσ is the
minimum of ( )x t . Then
( )( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( )
exp0 exp .
exp exp
c t y tx t a t b t x t
t t x t m t y tα β∆
≥ = − −+ +
Thus we get
( )( ) ( )( ) ( )( ) ( )( )0
expexp 1 exp .
ul u u u l
l
c y ta b x t b n c x tα
α≤ + ≤ +
Then ( )( ) ( )0
exp .1
l
u u l
ax tb n c α
≥+
If t is a right dense point then ( )( )( ) ( )0
exp .1
l
u u l
ax tb n c
σα
≥+
If t is right scattered, we interested
with the maximum of the solution. Let ( )tσ be the maximum of x(t).
( )( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( )( )
ˆ ˆexpˆ ˆ ˆ ˆ0 exp .
ˆ ˆ ˆ ˆ ˆexp expu
c t y tx t a t b t x t a
t t x t m t y tα β
∆≤ = − − ≤
+ +
Then ( )( )ˆexp .u lx t a b≤ If ( )ˆ ˆt tσ= , then ( )( )( )exp .u lx t a bσ ≤
If ( )ˆ ˆt tσ≠ , then ( )( )( ) ( )( )ˆexp exp .u l ux t a b aσ µ≤
Thus
( )( )( ) ( ) ( )( )( )( )( ) 10
exp exp exp .1
ll u u l u u l
u u l
ax t a b a b a c m Kb n c
σ µ µα
≥ − − =+
Using (3) and (7) above results we obtain
( )( )( ) ( )1
0 01 2
.exp
w w
u u u
Kd t t f t tK m yα β η
∆ ≥ ∆+ +∫ ∫
This implies
( )( ) ( )( )( )( )( )
( ) ( )( ) ( )( ) ( )( )( )
20
240 0 0 0
ln exp exp1
ˆln .
ll u u l u u l
u u l
w w w wu u u
ay a b a b a c mb n c
f t t d t t d t t m d t t M
η µ µα
β α
≥ − − +
⋅ ∆ − ∆ − ∆ − ∆ =
∫ ∫ ∫ ∫
Hence, according to the above discussion we have ( ) 1 22 4 4 4
ˆ ˆ ˆmin , .y M M Mη ≥ = Using second inequality in
Lemma 1 we have ( ) ( )( )4 40ˆ ˆ2 .
wy t M d t t H≤ − ∆ =∫ Thus [ ] ( ) 3 40,
ˆmax max , .t w y t H H∈ ≤
Rest of the proof

A. F. Güvenilir et al.
1662
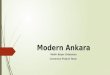
is similar to Theorem 2. Corollary 2. In Theorem 4 if we take as then we get Theorem 3 in [21]. Example 3. [ ]2 ,2 1 ,k k k= + ∈ k start with 0.
( ) ( )( ) ( )( ) ( )( )( ) ( )
( )( ) ( )( ) ( ) ( )
( ) ( )( ) ( )( ) ( )( )( ) ( )( ) ( ) ( )
0.1sin 2π 0.2 0.1sin 2π 0.25 exp
0.1 0.1cos 2π exp,
0.2sin 2π 0.2 1 0.5cos 2π exp exp
4cos 2π 6.5 exp0.3sin 2π 1
0.2sin 2π 0.2 1 0.5cos 2π exp exp
x t t t x
t yt t x y
t xy t t
t t x y
∆
∆
= + − +
+−
+ + + +
+= − + +
+ + + +
Example 3 satisfies all the conditions of Theorem 4, thus it has at least one periodic solution. All the graphs that we see in Figures 1-3 are obtained by Mathlab.
4. Discussion In this paper, the impulsive predator-prey dynamic systems on time scales calculus are studied. We investigate when the system has periodic solution. Furthermore, three different conditions have been found which are ne-cessary for the periodic solution of the predator-prey dynamic systems with Beddington-DeAngelis type func-tional response. Also by using graphs, we are able to show that the conditions that are found in Theorem 2, 3
Figure 1. Numeric solution of Example 1 shows the periodicity.

A. F. Güvenilir et al.
1663
Figure 2. Numeric solution of Example 2 shows the periodicity.
Figure 3. Numeric solution of Example 3 shows the periodicity.
and 4 are enough for the periodic solution of the given system. In this work, since our system can model the life cycle of the such species like insects, what we have done new is finding necessary condition for the periodic so-lution of the given predator-prey system with sudden changes. In addition to these, according to the structure of the given time scale , the conditions that are found in Theorem 2, 3 and 4 become useful.
References [1] Wang, W., Shen, J. and Nieto, J. (2007) Permanence and Periodic Solution of Predator-Prey System with Holling Type

A. F. Güvenilir et al.
1664
Functional Response and Impulses. Discrete Dynamics in Nature and Society, 2007, Article ID: 81756, 15 p. [2] Beddington, J.R. (1975) Mutual Interference between Parasites or Predators and Its Effect on Searching Efficiency.
Journal of Animal Ecology, 44, 331-340. http://dx.doi.org/10.2307/3866 [3] DeAngelis, D.L., Goldstein, R.A. and O’Neill, R.V. (1975) A Model for Trophic Interaction. Ecology, 56, 881-892.
http://dx.doi.org/10.2307/1936298 [4] Fan, M. and Agarwal, S. (2002) Periodic Solutions for a Class of Discrete Time Competition Systems. Nonlinear Stu-
dies, 9, 249-261. [5] Fan, M. and Wang, K. (2000) Global Periodic Solutions of a Generalized n-Species GilpinAyala Competition Model.
Computers & Mathematics with Applications, 40, 1141-1151. http://dx.doi.org/10.1016/S0898-1221(00)00228-5 [6] Fan, M. and Wang, K. (2001) Periodicity in a Delayed Ratio-Dependent Predatorprey System. Journal of Mathemati-
cal Analysis and Applications, 262, 179-190. http://dx.doi.org/10.1006/jmaa.2001.7555 [7] Fan, M. and Wang, Q. (2004) Periodic Solutions of a Class of Nonautonomous Discrete Time Semi-Ratio-Dependent
Predatorprey Systems. Discrete and Continuous Dynamical Systems, Series B, 4, 563-574. http://dx.doi.org/10.3934/dcdsb.2004.4.563
[8] Fang, Q., Li, X. and Cao, M. (2012) Dynamics of a Discrete Predator-Prey System with Beddington-DeAngelis Func-tion Response. Applied Mathematics, 3, 389-394. http://dx.doi.org/10.4236/am.2012.34060
[9] Huo, H.F. (2005) Periodic Solutions for a Semi-Ratio-Dependent Predatorprey System with Functional Responses. Ap-plied Mathematics Letters, 18, 313-320. http://dx.doi.org/10.1016/j.aml.2004.07.021
[10] Li, Y.K. (1999) Periodic Solutions of a Periodic Delay Predatorprey System. Proceedings of the American Mathemat-ical Society, 127, 1331-1335. http://dx.doi.org/10.1090/S0002-9939-99-05210-7
[11] Wang, Q., Fan, M. and Wang, K. (2003) Dynamics of a Class of Nonautonomous Semi-Ratio-Dependent Predator- Prey Systems with Functional Responses. Journal of Mathematical Analysis and Applications, 278, 443-471. http://dx.doi.org/10.1016/S0022-247X(02)00718-7
[12] Xu, R., Chaplain, M.A.J. and Davidson, F.A. (2005) Periodic Solutions for a Predato-Prey Model with Holling-Type Functional Response and Time Delays. Applied Mathematics and Computation, 161, 637-654. http://dx.doi.org/10.1016/j.amc.2003.12.054
[13] Bainov, D. and Simeonov, P. (1993) Impulsive Differential Equations: Periodic Solutions and Applications, Pitman Monographs and Surveys in Pure and Applied Mathematics. Vol. 66, Longman Scientific and Technical, Harlow.
[14] Samoilenko, A.M. and Perestyuk, N.A. (1995) Impulsive Differential Equations. World Scientific Series on Nonlinear Science. Series A: Monographs and Treatises, Vol. 14, World Scientific, River Edge.
[15] Lakshmikantham, V., Banov, D.D. and Simeonov, P.S. (1989) Theory of Impulsive Differential Equations. Series in Modern Applied Mathematics, Vol. 6, World Scientific, Teaneck. http://dx.doi.org/10.1142/0906
[16] Wang, P. (2006) Boundary Value Problems for First Order Impulsive Difference Equations. International Journal of Difference Equations, 1, 249-259.
[17] Tang, S., Xiao, Y., Chen, L. and Cheke, R.A. (2005) Integrated Pest Management Models and Their Dynamical Beha-viour. Bulletin of Mathematical Biology, 67, 115-135. http://dx.doi.org/10.1016/j.bulm.2004.06.005
[18] Xiang, Z., Li, Y. and Song, X. (2009) Dynamic Analysis of a Pest Management SEI Model with Saturation Incidence Concerning Impulsive Control Strategy. Nonlinear Analysis, 10, 2335-2345. http://dx.doi.org/10.1016/j.nonrwa.2008.04.017
[19] Wei, C. and Chen, L. (2012) Periodic Solution of Prey-Predator Model with Beddington-DeAngelis Functional Re-sponse and Impulsive State Feedback Control. Journal of Applied Mathematics, 2012, Article ID: 607105. http://dx.doi.org/10.1155/2012/607105
[20] Bohner, M., Fan, M. and Zhang, J.M. (2006) Existence of Periodic Solutions in Predator-Prey and Competition Dy-namic Systems. Nonlinear Analysis: Real World Applications, 7, 1193-1204. http://dx.doi.org/10.1016/j.nonrwa.2005.11.002
[21] Fazly, M. and Hesaaraki, M. (2008) Periodic Solutions for Predator-Prey Systems with Beddington DeAngelis-Func- tional Response on Time Scales. Nonlinear Analysis: Real World Applications, 9, 1224-1235. http://dx.doi.org/10.1016/j.nonrwa.2007.02.012