Embed Size (px)
Citation preview
Model-Based Diagnosis of Hybrid Systems
Papers by:
Sriram Narasimhan and
Gautam Biswas
Presented by: John Ramirez
Introduction
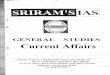
Modern systems are complex, and include supervisory control that switches modes of behavior.
The controller is a software program and is not tightly meshed with the continuous plant dynamics.
Plant
Supervisory controller
Actuators Sensors
Sensor valuesDiscrete Signals
Introduction
The continuous dynamics of the plant are defined by differential and algebraic equations.
0)),(),(),(()(
))(),(),(()(
ttqtutxgty
tqtutxftx
q(t) is the discrete model

Fault Detection and Isolation (FDI)
• The goal of this presentation is to briefly overview the study of FDI in hybrid systems with supervisory controllers.
• System faults may be component, actuator, sensor, and controller faults. (We do not deal with the later)
• The methodology we will cover combines qualitative and quantitative reasoning techniques to perform parameterized fault isolation of plant component faults.

Modeling for Diagnosis
Controller ModelPlant Model

Modeling for Diagnosis
Controller Model The primary model of the controller is
implemented as a finite state machine (FSM). States of the FSM correspond to the states of the
controller, which in turn define modes of the physical plant(q(t)).
The Transitions determine the conditions for switching states.

Modeling for DiagnosisController Model
1
3
2
4
5
6 7
8 9
10
t1t3
t2
t4 t5
t6
t7
t8
t9
t10
t11
Controller Model for 3 tank system
Tank 2
(C2)
Tank 2
(C2)
Tank 1
(C1)
= Valve
C = capacitance
R = resistance
Flow source 1 Flow source 2
R1 R6R2 R4
R3 R5Three Tank system

Modeling for Diagnosis
Plant Model Hybrid Bond Graph Models (HBG). State equations and temporal causal graph (TCG)
can be systematically derived from the bond graph representation of the system.
State equations along with the TCG constitute our diagnosis models.

Methodology for Hybrid Diagnosis
Hybrid observer: follows the continuous dynamics of the plant and identifies discrete mode changes.
Fault detection mechanism: signals a fault when the observer cannot compensate for differences between observed and expected behavior.
Fault isolation mechanism: generates candidate faults and refines them with the hybrid model and measurement from the system.

Methodology for Hybrid Diagnosis
Hybrid models
Diagnosismodels
System
Observer and modedetector
Fault isolation
Faultdetection
u y
r
^
y
Fault Hypotheses
The following information is assumed to be available to all modules:-HBG-FSA-FSM A = all possible autonomous events in the system-U = inputs-Y = system outputs-Parameters nominal
Diagnosis System Architecture

Methodology for Hybrid Diagnosis
Algorithm 1:Diagnosis Module
MODULE DIAGNOSE(Minitial,Xinitial)
// Observe the system until a fault is detected
<StackM, Yestimated>=OBSERVER(Minitial,Xinitial);
//Convert the quantitative residuals to qualitative values
QualResidualcurrent = SIGNAL_TO_SYMBOL(Y,Yestimated);
//Back propagate across modes to identify fault candidates
BackHorizon=2;
Listcandidates=HYBRID_BACK_PROP(StackM,QualResidualcurrent,BackHorizon);
//Forward propagete across modes to isolate the fault
Listcandidates=HYBRID_FAULT_OBSERVER(Listcandidates,Yestimated);
END DIAGNOSE

Hybrid Diagnosis Problem
Time Line
Mode 1 Mode 2 Mode 3
Mode 4
Mode 5Fault Occurs
Fault Detecte
d
Tracked TrajectoryActual Trajectory
T1 T2 T3 T4 T5 T6
Mode 6
Mode 7
Fault Hypothesis: <mode,parameter>
Piecewise linear hybrid dynamical systems
Presence of fault invalidates
tracked mode trajectory
Hypothesized fault mode
Known Controlled TransitionHypothesized
Autonomous Transition
Possible current modes
Hypothesized intermediate modes
Roll Back to find fault hypotheses
Roll Forward to confirm fault hypotheses
Catch up to current system mode to verify hypotheses against measurements
Note: Controller transitions known
Autonomous transitions have to be hypothesized

Fault IsolationBackground
The type of plant model employed determines the scheme to be employed.
Traditional schemes for the continuous domain use structured and directional residual approaches.
Extending these continuous methodologies to hybrid systems becomes intractable.

Fault Isolation
The approach we will follow involves hypotheses generation and hypotheses refinement.
Qualitative approach for hypotheses generation.
Qualitative-quantitative combined approach for hypotheses refinement.

Fault IsolationHypotheses Generation
For initial hypotheses generation we have to back propagate across modes. The assumption that the controller model is
correct implies that the observer predicted the correct mode sequence till the fault occurred. Therefore, the mode in which the fault occurred must be in the predicted trajectory of the observer.

Hypotheses GenerationTCG generation
•Effort and flow variables are vertices
•Relation between variables as directed edges
•=implies that two variables associated with the edge take on equal values, 1 implies direct proportionality,-1 implies inverse proportionality.
•Edge associated with component represents the component’s constituent relation.

Hypotheses GenerationAlgorithm 2:Hybrid Back Propagation
MODULE HYBRID_BACK_PROP(StackM, QualRi, BackHorizon)//Generate candidates in each mode in the mode trajectory. <Mcurrent, Timecurrent>=Pop(StackM); TCGcurrent=GET_TCG(HBG, Mcurrent)//Back propagate in selected mode for candidates in the mode Fcurrent=CONTINUOUS_BACK_PROP(TCGcurrent,QualRi); Add(Listcandidates,<Mcurrent,Timecurrent,Fcurrent>); Count=0;//Go back in the mode horizon upto BackHorizon number of nodes While(Count<BackHorizon)//Select next mode in mode trajectory and calculate TCG <Mnext, Timenext>=Pop(StackM); TCGnext, GET_TCG(HBG, Mnext);// Propagate qualitative deviations across modes QualRnext=BACK_PROP_ACROSS_MODES(Mcurrent, Mnext, QualRi)//Back propagate in selected mode for candidates in the mode Fnext=CONTINUOUS_BACK_PROP(TCGnext, QualRnext); Add(Listcandidates,<Mnext,Timenext,Fnext,1>); End While Return(Listcandidates)END MODULE

Roll Back Process
•Qualitative Hypotheses Generation• Back propagate through TCG in current mode to identify candidates
• Back propagate across mode transitions using transition conditions (need to account for reset conditions, and change in plant configuration – invert qualitatively)
• Repeat same process for previous modes to identify more candidates
- Tank 1 Pressure
- Tank 2 Pressure
- Tank 3 Pressure
Transition
Fault Occurred
Fault Detected
System Autonomous Transition

Fault IsolationHypotheses Refinement
First apply a qualitative forward propagation for each hypothesized fault candidate. To take into account mode changes, all possible modes
changes from the current mode are hypothesized. A candidate is dropped when the predictions do not
match the observations across all of the hypothesized modes
Apply a quantitative parameter estimation on remaining candidates. This approach works within a single continuous mode.

Hybrid Diagnosis Problem
Time Line
Mode 1 Mode 2 Mode 3
Mode 4
Mode 5Fault Occurs
Fault Detecte
d
Tracked TrajectoryActual Trajectory
T1 T2 T3 T4 T5 T6
Mode 6
Mode 7
Fault Hypothesis: <mode,parameter>
Piecewise linear hybrid dynamical systems
Presence of fault invalidates
tracked mode trajectory
Hypothesized fault mode
Known Controlled TransitionHypothesized
Autonomous Transition
Possible current modes
Hypothesized intermediate modes
Roll Back to find fault hypotheses
Roll Forward to confirm fault hypotheses
Catch up to current system mode to verify hypotheses against measurements
Note: Controller transitions known
Autonomous transitions have to be hypothesized

Quick Roll Forward
• Goal: Get to current mode, so parameter estimation can be applied to refine faults and identify fault magnitude
• Lemma 2: Sequence of k mode transitions in any order drives the system to the same final model
• Requires tracking of transients by progressive monitoringprogressive monitoring in continuous regions of space. Taylor series expansion defines qualitative fault signatures. Residual r(t) after fault can be described as:
• Progressive Monitoring: Match qualitative magnitude and slope of measurement signal transient against fault signature
)(!
)()(...
!2
)()(
!1
)()()()( 0
0
20
00
00 tRk
tttr
tttr
tttrtrtr k
kk
Fault signature: qualitative form of derivatives:
Qualitative form of
)(),....,(),( 000 trtrtr k
)(0),/()( 0 normalnormalbelowabovetr k

Quick Roll Forward
• In continuous case, mismatch implies fault hypothesis is not consistent. However, in hybrid tracking, it may imply that we are not in the right mode. We need to identify identify the current mode (roll forward)the current mode (roll forward)
• All controlled transitions are known, but we have to hypothesize autonomous transitions since observer can no longer predict them correctly
• Use fault signatures to hypothesize mode transitions
- Tank 1 Pressure
- Tank 2 Pressure
- Tank 3 Pressure
Transition
Fault Occurred
Fault Detected
System Autonomous Transition
Parameter Estimation (Real Time)
Derive transfer function model in current mode with only one unknown (fault parameter)
Initiate fault observer filter for each fault hypothesis least squares estimator for parameter estimation
Test for convergence identifies true fault candidate

Least Square Estimation from IOE
error prediction theis e output, estimated theis y
IOE),in sh' and svector(g'parameter theis
s,0' and sy' s,u' of madematrix a is
factor, forgetting theis ,covariance theis Q
)(ˆ)()()1()(
)(ˆ)()(ˆ
)1()()(ˆ
)()()1()(
1
tettQtt
tytyte
ttty
tttQtQT
T
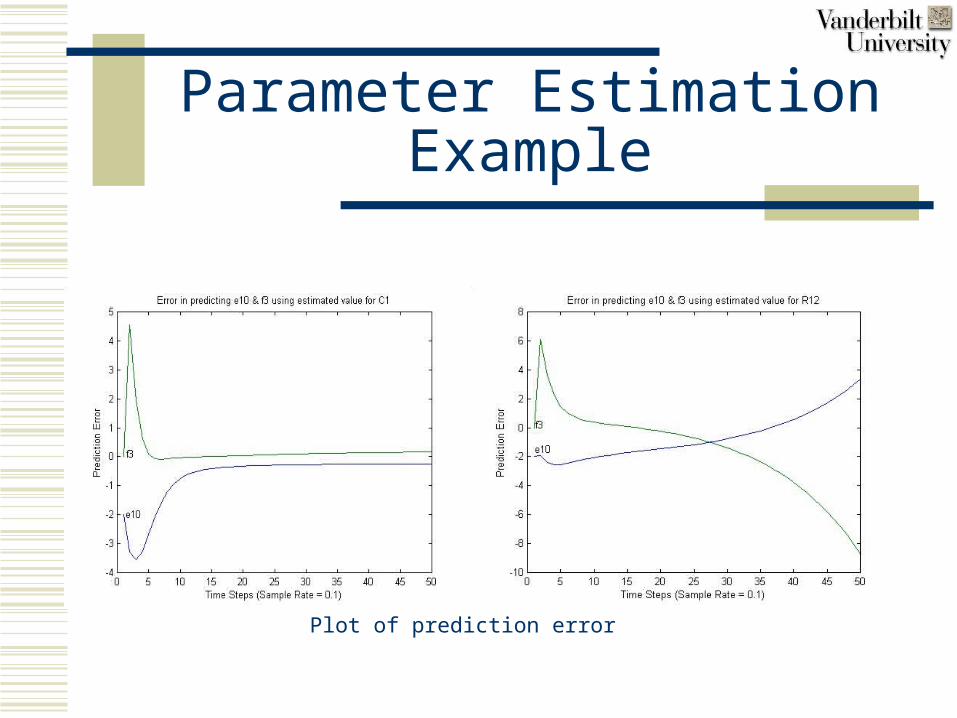
Parameter Estimation Example
Plot of prediction error

Quantitative Parameter Estimation: Issues
• Deriving the simplified one unknown parameter equation for least square estimator
• Convergence to local minima – need good initial estimates
• Need for persistent excitation in input – mitigated to some extent by reducing it to a one parameter estimation problem
• Measurement noise leads to biased estimates – need to apply more sophisticated techniques: IVM methodsObservation: What is good for qualitative FDI is not always good for quantitative identification using least squares methods
Summary
Model for Diagnosis Controller Model
FSM Plant Model
HBG
Fault Isolation Hypotheses Generation
TCG Hypotheses Refinement
Parameter Estimation
Conclusion
By having the supervisory controller model and assuming that our model is correct, we do not have to make the assumption that faults are detected in the mode in which they occur, and we still are able to avoid the intractability problem.
Combination of qualitative + quantitative approaches suitable for online diagnosis
Approach different from discrete-event approaches of Lunze and Sampath