Embed Size (px)
Citation preview

Mobile Phone Based Acoustic Localization usingDoppler shift for Wireless Sensor Networks
Amarlingam M†, Charania Navroz Firoz††, P Rajalakshmi†
†Department of Electrical Engineering††Department of Computer Science and Engineering
Indian Institute of Technology HyderabadHyderabad, India
Email: ee13p1003, cs14mtech11003, [email protected]
Abstract—Numerous applications of Wireless Sensor Network(WSN) requires a location map of sensor nodes for smartinteraction, to ease the manual servicing of nodes etc. To createa location map, the primary task involves finding the locations ofsensor nodes with an assumed reference origin (localization). Thisstudy proposes a mobile phone (commercial off-the-shelf mobilehardware) based acoustic localization technique that can be usedalong with physical or logical topology map to ease the search of aspecific sensor node. The proposed method makes use of Dopplereffect in guiding deployer towards the node of interest. A real-time deployment of the proposed acoustic localization algorithmis performed in an area of 20 m × 20 m using in-house developedIITH Motes and mobile phone. From the experimental analysisit is observed that a reduction of 62.5% and 66.6% in searchingtime by the user is achieved upon using the proposed algorithmwhen compared to labeling methodology with both the logicaland physical topology scenarios respectively.
I. INTRODUCTION
Location map is a map which associates physical locationsto the locations of the respective sensor nodes. Every locationmap is created with a reference point and a co-ordinate system.In real field, searching a specific sensor node with onlylocation map (physical topology map) or logical topology mapis an arduous and tedious task. A basic acoustic localizationtechnique for this problem is coined in [1]. In this article wepropose an algorithm that can be integrated along with alreadyproposed solution to make localization system more interactiveand full-featured.
With the rapid growth in technological advances in the areasof Internet of Things (IOT) and WSN, the sensor nodes in anetwork require efficient management system for control andmonitoring. This system should also be able to precisely locatethe sensor nodes for sensor network applications like forestfire detection, habitat sensing, pollution monitoring etc. In theliterature various localization techniques have been proposedfor addressing the aforementioned challenges. Localization al-gorithms based on Received Signal Strength Indication (RSSI)are given in [2]-[8]. Range based 2D localization algorithmsusing RSSI and path-loss model are proposed in [2]-[3].Authors of [4] developed probabilistic model with RSSI forestimating 2D location of sensor nodes. N. Patwari et al.[5] presented relative 2D location estimation algorithm usingtime-of-arrival (ToA) and RSSI measurements from beacon
sensor nodes. Centroid based 2D localization algorithm byusing connectivity matrix from reference nodes is proposedin [6]. Applications like smart buildings, industrial securitysystem etc., requires 3D locations of sensor nodes. Authors of[7] and [8] described RSSI based 3D localization algorithms.Acoustic localization techniques are more desirable than RFbased localization techniques, the reason being the relativelylow speed of acoustic waves that causes the localization systemto be less sensitive to errors in time-of-flight measurements.Authors of [9] and [10] proposed acoustic localization algo-rithms for sensor networks. Angle-of-arrival based localizationalgorithms are proposed in [11]-[12]. G. Mao et al. [13] havedone a survey on localization techniques for wireless sensornetworks. All of these localization algorithms are proposedto create a location map for sensor nodes which associatesthe physical locations to the locations of the respective sensornodes. These algorithms consider a known location as thereference point together with the help of a coordinate systemto create a localization map. In real field deployment of sensornetworks, sensor nodes are labeled with unique ID’s (ID’susually includes numbers 1, 2, .. or unique symbols A, B, ...etc.) for identification which is also known as labeling method.In general, localization maps embed the information such asnode ID along with their co-ordinates.
Fig. 1: Deployment Adviser tool showing network topologyalong with redundant and hot-spot nodes
In [14], we proposed and developed a mobile phone ap-plication called as Deployment Adviser tool for the purposeof field deployment of sensor nodes. The Adviser tool showslogical topology map, redundant relay nodes and hot-spot relaynode in the network as shown in Fig. 1. The Adviser tooladvises the deployer for placing nodes targeting improved

lifetime of the network by distributing the power consumptionamong all the nodes present in the network. To increasethe network lifetime, extra relay nodes around the hot-spotrelay node (node which consumes more energy compared toall other nodes in the network) have to be placed. In realfield deployment removing redundant relay nodes and placingextra relay nodes around hot-spot relay node involves manualintervention and exact knowledge of their physical locations.One example where a redundant node is removed and anextra relay node is placed using general labeling method isillustrated in Fig. 2. For large-scale network, searching aparticular labeled node in real field by using logical topologymap or physical topology map alone is time consuming anddifficult. There is a need for an additional localization systemconnected to network topology mapping system, which makessearching of the sensor nodes easier. All the above discussedconstraints motivated us towards this study and we proposed amobile phone based acoustic localization system for wirelesssensor networks.
Fig. 2: Removing redundant node and placing extra relaynodes next to hot-spot
In prior research, we proposed and implemented a basicmobile phone based acoustic localization system [1] whichfinds physical location of the sensor node in a sensor networkwith the help of network topology map. This system showswhether deployer is moving towards or away from the sen-sor node based on Doppler effect caused due to deployer’smobility. Although the information whether the deployer ismoving towards or away from sensor node is obtained, it isstill onus on deployer to localize a sensor node in a large-scalenetwork precisely. To facile deployer for quick and preciselocalization of the sensor node, we propose an algorithm basedon Doppler effect. Proposed method improves the process oflocalization by showing exact direction in which the deployerhas to move to reach the required sensor node. With thehelp of these algorithms, a complete system of mobile phonebased acoustic localization along with network topology map(physical topology map or logical topology map) is designedand developed. One of the main applications of the proposedalgorithm includes servicing (sensors replacement, troubleshooting of sensors circuitry etc.) of the sensor nodes in asensor network.
R. J. Kozick et al. [15] proposed a localization algorithmusing acoustic Doppler shift with a mobile access point. Here,the mobile access point need to know its location. The nodesare equipped with acoustic receivers (i.e. microphones) and
information of the mobile access point location is known prior.Sensor nodes localize themselves by finding Doppler shift ofthe acoustic wave which is emitted by mobile access pointwith the help of its location. Y. Nishimura et al. [16] proposeda method which finds direction between two mobile phonesusing Doppler effect. The authors used pulse-pair methodto calculate Doppler shift where both devices transmit andreceive multiple pulse type acoustic waves (pulse type chirpsignal). Direction between two mobile phones is estimated bydetecting change between transmission and reception acousticpulse intervals. W. Huang et al. [17] showed direction find-ing and indoor localization techniques using acoustic signalDoppler effect. They used inertial sensors like accelerometerto estimate velocity of the mobile acoustic receiver. PhaseLocked Loop (PLL) is implemented to track phase changeof the received acoustic wave. In their application, to findvelocity of the acoustic receiver and phase, a complex systemwith PLL, Band Pass Filter (BPF) and Automatic Gain Control(AGC) is implemented. However, PLL, BPF, AGC are morecomputational intensive applications which poses multipleconstraints when implementing on low end (commercial off-the-shelf) COTS (mobile phone) devices.
In case of WSN, nodes (motes) have low computation andpoor processing capability compared to mobile phones. Togenerate and detect received acoustic waves, extra hardwareoverhead is required which can be interfaced with sensornodes. For detecting acoustic wave, a specially designedcomplex hardware consisting of custom sensor board withmicrophone, ADC, FPGA and DSP interfaced with Mica2mote [18] is used. High complexity in hardware increasespower consumption, which leads to reduction in sensor node’slifetime.
Our method of localizing sensor node in a sensor networkis direction oriented. In the proposed acoustic localizationtechnique, we developed a low complex acoustic moduledesigned using simple RLC resonant circuit followed by anamplifier. In our system, Doppler effect is used to find thedirection of sensor node with respect to mobile phone (carriedby deployer). Here, sensor node emits acoustic wave andDoppler effect is caused due to deployer’s mobility. To emitacoustic wave, sensor node is equipped with an in-housedeveloped low complex acoustic module.
Rest of the paper describes the technical aspects in briefand is arranged as follows. In Section II, we discussed thetechnical aspects of the proposed localization method and IIIdescribes implementation of the algorithm. Section IV explainsexperimental evaluation and Section V concludes the paper.
II. PROPOSED LOCALIZATION METHOD USING DOPPLEREFFECT
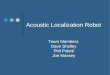
Let the speed of the transmitted sound wave from the sourcebe vs and the average moving velocity of the listener be vl asshown in Fig. 3. θ indicates the angle between sound sourceand listener velocity (i.e. angle between vl and −vs). Let therelative velocity of sound wave observed at the listener bevob. If listener’s moving angle θ ∈ {θ1 | 0◦ ≤ θ1 < 90◦},

then vl cos θ will be positive and hence resultant velocity vobwill be ≥ vs from equation (1). In another case, if listenermoving angle θ ∈ {θ1 | 90◦ < θ1 ≤ 180◦}, then vl cos θ willbe negative and hence resultant wave velocity vob will be ≤ vsfrom equation (1). Received sound wave frequency fl at thelistener will be calculated using equation (2).
Fig. 3: Listener moving at an angle of θ with a velocity vl
vob = vs + vl cos θ (1)
fl =vobvs× fs (2)
Then above equation becomes,
fl = (1 +vl cos θ
vs)× fs (3)
fl = fs + fd (4)
where
fd = (vl cos θ
vs)× fs (5)
Here, fs is the source frequency and fd is the Dopplerfrequency.
When listener approaches the sound source θ ∈ {θ1 | 0◦ ≤θ1 < 90◦}, from equation (4) Doppler frequency fd will bepositive. The observed sound wave frequency at the listenerwill be fl ≥ fs from equation (3). When listener is movingaway from sound source θ ∈ {θ1 | 90◦ < θ1 ≤ 180◦},Doppler frequency fd will be negative from equation (4) andthe observed sound wave frequency at listener will be fl ≤ fsfrom equation (3). In application [1], the mobile phone detectsdeployer’s direction of movement and advise the deployer byindicating whether his movement is towards the sensor nodeor away from it based on received frequency.
Even with this information, it is still difficult to locatethe sensor node in a large-scale sensor network. Hence, wepropose an algorithm which estimates the direction angle andmake use of the same by integrating with the existing system[1].A. Direction angle estimation
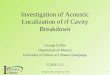
Direction of sensor node can be estimated in a simpleway by generating Doppler effect. One method for generatingDoppler effect is by swinging acoustic receiver horizontally.Swinging of mobile phone in 360◦ with respect to WorldCoordinate System (WCS) can detect acoustic source directionby using earth magnetic field. Consider a scenario where asound source is exactly in front of the deployer and deployerswings mobile phone (acoustic receiver) horizontally in 360◦.
(a)
swinging angle in degrees0 50 100 150 200 250 300 350
Dop
pler
freq
uenc
y in
Hz
-100
-50
0
50
100
(b)
Fig. 4: (a) Listener swinging mobile at an angle of θ, (b) Doppler frequencychange Vs. angle θ with vl = 0.6 m/s, vs = 340 m/s and fs = 20 kHz.
swinging angle in degrees50 100 150 200 250 300 350
Dop
pler
freq
uenc
y in
Hz
-100
-50
0
50
100
(a) θ ∈ {θ1 | 0◦ ≤ θ1 ≤ 90◦}
swinging angle in degrees150 200 250 300 350 400 450
Dop
pler
freq
uenc
y in
Hz
-100
-50
0
50
100
(b) θ ∈ {θ1 | 90◦ ≤ θ1 ≤ 180◦}
swinging angle in degrees200 250 300 350 400 450 500 550
Dop
pler
freq
uenc
y in
Hz
-100
-50
0
50
100
(c) θ ∈ {θ1 | 180◦ ≤ θ1 ≤ 270◦}
swinging angle in degrees300 350 400 450 500 550 600 650
Dop
pler
freq
uenc
y in
Hz
-100
-50
0
50
100
(d) θ ∈ {θ1 | 270◦ ≤ θ1 ≤ 360◦}
Fig. 5: Doppler frequency patterns of four quadrants with vl = 0.6 m/s,vs = 340 m/s, fs = 20 kHz and random swing starting points θ = 10◦,120◦, 190◦, 290◦.
The angle θ between mobile phone swinging direction andthe acoustic source direction can vary from 0◦ to 360◦ asshown in Fig. 4a. From equation (4) Doppler frequency ofacoustic signal fd with respect to change in θ (from 0◦ to360◦) follows sinusoidal pattern as shown in Fig. 4b. HereDoppler frequency crosses zero two times in one 360◦ swingas shown in Fig. 4b. Pattern will be same for both clock-wiseand anti-clock-wise swings. The angle with respect to WCS atwhich the Doppler frequency pattern crosses its first zero canbe concluded as the acoustic source direction. In other words,the point at which the angle between acoustic source to themobile swing direction (θ) becomes 90◦ can be concluded asthe direction of the acoustic source.
Deployer can start swinging from any arbitrary directionwith respect to acoustic source. Patterns of the Doppler fre-quency with the starting angle of the swing chosen randomlyin four different quadrants is shown in Fig. 5, here swingingangle is wrapped around the range 0◦ to 360◦. Also there aretwo zero crossing points in every swing. To decide which pointis exact direction to the acoustic source is the question to beanswered. In a window size of 180◦ around zero crossing,if the Doppler frequency pattern changes from positive to

negative, then the direction of the acoustic source with respectto mobile phone is coherent and opposite otherwise i.e. whenthe pattern changes from negative to positive. Pseudo code forthe proposed algorithm is described in Algorithm 1.
Algorithm 1 Estimation of direction angle XRequire: Source transmitted frequency fs and set of received frequencies {fli} and
respective sampled magnetic sensor values {Mgi} where i ∈ (1, N)
Take X ← 0, X1 ← 0, X2 ← 02: Temp← fl1 − fs
for i=2:N do4: fd ← fli − fs
if fd < 0 and Temp > 0 then
6: X1 ←Mgi−1
+ Mgi
2else if fd > 0 and Temp < 0 then
8: X2 ←Mgi−1
+ Mgi
2+ 180◦
else10: Temp← fd
end if12: end for
if X1 6= 0 and X2 6= 0 then
14: X ←X1 + X2
2else
16: if X1 6= 0 thenX ← X1
18: elseX ← X2
20: end ifend if
1) Detection of LoS component: In proposed method, re-ceived acoustic wave sampling frequency is 44.1 kHz. Con-tinuous received signal is divided into windows of size 50milliseconds in time containing 2,205 samples. Each windowcontains combination of multiple received acoustic waves dueto multipath. Usually Line of Sight (LoS) component will havehigher strength than non-line-of-sight (NLoS) components. Topick the frequency changes corresponding to LoS componentin a window, we are taking maximum peak power frequencyand calculating an adaptive threshold which is equal to 85% ofmaximum received power of that window. Picking frequenciesthat are greater than the threshold will give almost all fre-quency changes of LoS component. Empirically, we observedthat user swings mobile phone with an average tangentialvelocity of 0.6 meter per second. We considered deployerarm length r = 70 cm [16]. In a window time of 50 ms,deployer swings approximately θ′ = 3◦ as shown in Fig. 6.The variation in θ = θ2 − θ1 (θ′ ≤ θ2 − θ1 ≤ 2θ′ withconsideration of d ≥ r) with in 50 ms lies between 3◦ and6◦. The maximum variation of Doppler frequency when θchanges by 6◦ is 3.62 Hz with vl = 0.6 m/s and vs = 346m/s [20]. In other words we pick frequencies from a windowsuch that the difference between maximum frequency andminimum frequency of that window is less than 3.62 Hz withrespect to maximum peak power frequency. Average changein frequency over a window gives the mean value of Dopplershift at corresponding approximate angle with respect to WCS.This procedure eliminates most of the multipath componentsin a window.
2) Environmental effects mitigation: The proposed algo-rithm finds a point where the angle between mobile swinging
Fig. 6: Change of angle in a window time
direction and the acoustic source θ becomes 90◦ i.e when thereceived frequency of acoustic wave is same as the transmittedfrequency. θ is independent from acoustic wave speed vs. TheDoppler frequency becomes zero when θ equals 90◦ and thispoint is taken as acoustic source direction. Estimated directionpoint is independent from environmental factor changes likevariation in humidity, temperature, pressure etc., as θ isindependent of acoustic wave velocity.
III. ACOUSTIC LOCALIZATION IMPLEMENTATION
Proposed acoustic localization system is depicted in Fig. 7.Google Nexus 5 mobile phone with Android 5.1.1 OS is usedfor mobile application development and testing. TinyOS-2.1.1is used for sensor node programming and JAVA made use forserver programming. To create sensor network, IITH motes areused as sensor nodes [19]. Each sensor node in the networkis equipped with simple acoustic module as shown in Fig. 8.
Fig. 7: Acoustic localization implementation
Sensor nodes usually have very low computation capabilitydue to minimal on-board resources. Now a days mobile phonesopened the feasibility for highly intensive computations byutilizing extensive on-board resources such as huge internalmemory, multiple radios etc., Acoustic wave generation issimpler than detection and processing. Thus, sensor nodes areselected as sound wave sources and mobile phone as listener.
Sensor node is programmed to generate square pulses fromone GPIO (General Purpose Input/Output) pin. Interfacedcircuitry converts 20 kHz square pulses to 20 kHz singletone amplified sinusoidal wave which is input to the speakeras shown in Fig. 9. From the speaker 20 kHz sound waveis emitted. 20 kHz frequency is chosen for the proposedsystem implementation because of low ambient noise levels.

Fig. 8: Sensor node interfacing with acoustic module
The circuitry which converts square wave to sinusoidal is asimple RLC resonant circuit that consumes less power. Foramplification, we used a simple acoustic wave amplifier ICLM386 based circuitry.
Fig. 9: Acoustic wave generation circuitryA. Mobile application for finding direction
Deployer swings mobile phone horizontally in 360◦ to finddirection between the mobile phone and the sensor node thatemits acoustic wave. While swinging, the mobile applicationreceives sound signal from microphone of the mobile phone.Further, Fast Fourier Transform (FFT) is applied on thereceived acoustic signal and the frequency fl is calculated.From equation (3) Doppler frequency can be calculated fromfl and known sensor node frequency fs. Original sound sourcefrequency fs information will be stored in mobile phone.When swing starts, magnetic sensor of the mobile stores WCSvalues using earth magnetic field direction. Doppler frequencyarrays will be processed to find the zero crossing point indexand the same index of magnetic sensor array will be thesolution if application considers first zero crossing index. Incase if application considers second zero crossing index ofDoppler frequency array, then resultant angle of the soundsource direction is the sum of magnetic sensor estimated anglevalue at that index and angle of 180◦. Mobile phone displaysGUI with an arrow that shows sensor node direction is shownin Fig. 10.
Fig. 10: Android application showing direction to the acousticsource
IV. EXPERIMENTAL RESULTS AND ANALYSIS
For experimentation, a sensor network with 10 randomlydeployed nodes in an area of 20 m × 20 m at outdoor
(a) (b)
Fig. 11: (a) physical topology map, (b) logical topology map
environment is considered. To analyze the proposed technique,two cases are considered. In first case, deployer knows logicaltopology map of the network. In second case deployer knowsphysical topology map. To search a node in network, firstdeployer (a volunteer) has to enable swing option which isdeveloped in GUI and then he has to swing the mobile phone.Application shows direction towards the sensor node withrespect to mobile phone as shown in Fig. 10. If user enableswalk option, application guides the deployer by indicatingwhether the deployer is approaching or leaving the sensornode [1]. Experiments are performed with the help of 10volunteers. Each volunteer is asked to search a particular nodein network by starting at random location with the help ofgiven network topology map under both general labeling andproposed methods.A. Case 1: Searching a sensor node with logical topology map
We deployed a sensor network as shown in Fig. 11a andeach node is labeled with a unique ID. Initially volunteersare asked to find a particular node without using acousticapplication (here after we call proposed application as sensorapplication), only with the help of logical topology map. Nextwe changed node numbers but maintained the same topology.Volunteers are again asked to find a the target node with thehelp of logical topology map along with sensor application(walk+swing). Average time consumption of all volunteers inboth cases are calculated. To compare the full functioningsystem with prior proposed system [1], same experiment isrepeated by considering a case where deployer uses only walkoption (which is proposed in [1]) to search a node. Resultantaverage time consumption of the mentioned three cases isshown in Fig. 12.
B. Case 2: Searching a sensor node with physical topologymap
Network is deployed as shown in Fig. 11b. Volunteers areasked to find a particular node without using sensor applicationwith the help of physical topology map (2D location map).Next we changed node numbers but maintained the sametopology. Volunteers are again asked to find a target nodewith the help of physical topology map and sensor application.Average time consumption of all volunteers in both casesare calculated. To compare the full functioning system withthe prior proposed system [1], same experiment is repeatedby using only walk option as discussed in subsection IV.A.

Logical topology map Physical topology map
Tim
e in
sec
onds
0
10
20
30
40
50
60
70
80Average time required
labeling methodwalkproposed method (walk+swing)
Fig. 12: Average time consumed for searching a sensor nodein network
Average time consumption of all considered cases are shownin Fig. 12.C. Results and analysis
From Fig. 12, we can observe that searching a particu-lar sensor node by using logical topology map or physicaltopology map without sensor application is a time consumingprocess, which clearly implies that it is onus to the deployer. Inlogical topology case, an average time consumed for searchinga node using labeling method is 85 s, with walk option 50 swhere as the complete system it is taking only 30 s. In physicaltopology case for searching a particular node, the average timeconsumed with labeling method, walk option and completesystem are 60 s, 40 s, 20 s respectively. From the aboveanalysis one can infer the improvement in ease of localizing aspecific sensor node being provided with the proposed method.
D. Discussion
To search a particular node in a sensor network, coarsely ac-curate measurements are done based on direction finding withtolerable mismatch are sufficient. Average angle estimationerror using the proposed algorithm is observed to be 25.53◦
which is sufficient to allow user to search sensor node in realfield easily.
Current consumption of designed low power acoustic mod-ule is observed to be 80.5 mA (which is practically measured)at a voltage of 5 V . Acoustic module will be ON when userwants to find physical location of the sensor node in realfield. Acoustic module will be turned OFF for the remainingtime which means that there will be a very minimal powerconsumed by the acoustic module.
Time consumption for searching a sensor node dependson network structures and sizes. In this article, results areanalyzed with network size of 10 nodes deployed in 20 m× 20 m area for evaluating the performance of the proposedmethod. V. CONCLUSION
In this paper, we proposed an acoustic localization methodthat finds the physical location of the sensor node in a sensornetwork with the help of network topology map and Dopplereffect. The proposed method is implemented and tested usingIITH motes and off the shelf mobile phone. Thus developed
sensor application assists the deployer in reaching a sensornode of interest by guiding the deployer with appropriatedirection. Experimental results shows that, for searching aspecific node consumed time is only 37.5% and 33.3% oftime consumed in case of labeling method used alone withthe both logical and physical topology scenarios accordingly.It is clearly indicating that, proposed method reduces onus ondeployer and facilitate of searching the sensor nodes in sensornetworks. REFERENCES
[1] M. Amarlingam, P. Rajalakshmi, M. Yoshida, and K. Yoshihara, “Mobilephone based acoustic localization for wireless sensor networks,” in Proc.WF-IoT 2015.
[2] G. Wang and K. Yang, “A new approach to sensor node localization usingRSS measurements in wireless sensor networks,” IEEE Trans. WirelessCommun., vol. 10, no. 5, pp. 1389-1395, May 2011.
[3] S. Gansemer, U. GroBmann, and S. Hakobyan, “RSSI-based euclideandistance algorithm for indoor positioning adapted for the use in dynami-cally changing WLAN environments and multi-level buildings,” in Proc.Int. Conf. Indoor positioning and Indoor Navigation(IPIN) 2010.
[4] C. Papamanthou and P. Franco, “Algorithms for location estimationbased on RSSI sampling,” Algorithmic Aspects of Wireless Sensor Netw.,Springer Berlin Heidelberg, 2008, pp. 72-86.
[5] N. Patwari, A. O. Hero, M. Perkins, N. S. Correal, and R. J. ODea,“Relative location estimation in wireless sensor networks,” in IEEETrans. Signal Process., vol. 51, no. 8, pp. 2137-2148, Aug. 2003.
[6] N. Bulusu, J. Heidemann, and D. Estrin, “GPS-less low cost outdoorlocalization for very small devices,” IEEE Pers. Commun., vol. 7, no. 5pp.28-34, Oct. 2000.
[7] M. Amarlingam, P. Rajalakshmi, V. K. Netad, M. Yoshida, and K.Yoshihara, “Centroid based 3D localization technique using RSSI with amobile robot,” in Proc. Int. Symp. Wireless Personal Multimedia Commun.(WPMC), pp. 391-395, 7-10 Sep. 2014.
[8] M. Yoshida, K. Yoshihara, M. Amarlingam, V. K. Netad, and P. Rajalak-shmi, “3D localization technique with mobile robot for improving oper-ability of remote-control devices,” in Proc. Int. Conf. Wireless Commun.and Mobile Computing (IWCMC), pp. 485-490, 24-28 Aug. 2015.
[9] X. Sheng and Y. Hu, “Maximum likelihood multiple-source localizationusing acoustic energy measurements with wireless sensor networks,”IEEE Trans. Signal Process., vol. 53, no. 1, pp. 44-53, Jan. 2005.
[10] S. Astapov, J. Preden, and J. Berdnikova, “Simplified acoustic localiza-tion by linear arrays for wireless sensor networks,” in Proc. IEEE 18thInt. Conf. Digital Signal Process. (DSP), 2013.
[11] P. Kulakowski, J. Vales-Alonso, E. Egea-Lopez, W. Ludwin, and J.Garca-Haro, “Angle-of-arrival localization based on antenna arrays forwireless sensor networks,” Comput. & Elect. Eng., 2010.
[12] J. Qiu, D. Chu, X. Meng, and T. Moscibroda, “On the feasibility of real-time phone-to-phone 3d localization,” in Proc. ACM 9th Conf. EmbeddedNetw. Sensor Syst., 2011.
[13] G. Mao, B. Fidan, and B. D. O. Anderson, “Wireless sensor networklocalization techniques,” Elsevier/ACM Comput. Netw., 2007, pp. 2529-2553.
[14] M. Amarlingam, I. Adithyan, P. Rajalakshmi, Y. Nishimura, M. Yoshida,and K. Yoshihara, “Deployment adviser tool for wireless sensor net-works,” in Proc. IEEE World Forum on Internet of Things (WF-IoT),pp. 452-457, 6-8 Mar. 2014.
[15] R. J. Kozick and B. M. Sadler, “Sensor localization using acousticdoppler shift with a mobile access point,” IEEE/SP 13th Workshop onStat. Signal Process., pp. 1256-1261, 17-20 Jul. 2005.
[16] Y. Nishimura, N. Imai, and K. Yoshishara, “A proposal on directionestimation between devices using acoustic waves,” in Proc. 8th Int. ICSTConf. Mobile Ubiquitous Syst.: Comput., Netw. Serv., 2012, pp. 25-36.
[17] W. Huang, Y. Xiong, X. Li, H. Lin, X. Mao, P. Yang, Y. Liu, and X.Wang, “Swadloon: Direction finding and indoor localization using acous-tic signal by shaking smartphones,” IEEE Trans. Mobile Computing, vol.14, no. 10, pp. 2145-2157, Oct. 2015.
[18] Crossbow Technology, Inc. [online]. Available: www.xbow.com[19] P. Rajalakshmi. (2012). IITH Mote-Wireless Sensor Communication
Module. [Online]. Available: http://www.iith.ac.in/∼raji/downloads/IITH-mote-webpage.pdf.
[20] NDT Resource Center. [Online]. Available: https://www.nde-ed.org/EducationResources/HighSchool/Sound/tempandspeed.htm.