Embed Size (px)
Citation preview

Minimizing the Complexity of an Activity Network
Jerzy Kamburowski College of Business Administration Universjty of Toledo Toledo Ohio 43606-3390
David J Michael i2 Technologies 909 E Las Colinas Boulevard 1 ffh Floor trving Texas 75039
Matthias PM Stallmarin Department of Computer Science North Carolina State University Rateign North Carolina 27695-6206
When an activity-on-arc (AoA) project network is to be constructed one typically seeks to minimize the number of dummy arcs Recent investigations have shown however that the computational effort of many network-oriented project management techniques de- pends strongly on the so-called complexity index ( C l ) of a network We show other justifications for minimiz- ing the Cl rather than the number of dummy arcs We also present a polynomial time algorithm for construct- ing an AoA network with the minimum C1 in the class of all AoA networks having the minimum number of nodes n 2 0 C O John Wiley amp Sons Inc
Keywords activity networks network complexity index dummy arcs series-parallel PERT
1 + INTRODUCTION
In network-based project management methodology the precedence constraints between the activities of a project can be represented graphically in two different ways by assigning the activities either to the nodes or lo (a subset of) the arcs of a network In either case a directed acyclic network is defined In an activifi-on- node (AoN) network G = (VE) the nodes represent the project activities and the arcs represent the i m e - dtate precedence relations between the activities Thus an AoN network is unique Tn an activity-ost-arc (AoA) two-terminal network D = (N A) the set of arcs repre- sents the project activities and may include dummy arcs to preserve the precedence relations The nodes N of ihis nonunique network are interpreted as project events
If the activity durations are deterministic the network D = (N A) is referred to as a CPM network If they are random variables this network is called a PERT network
Past research has focused on translating G to D so as to minimize the number of dummy arcs in D The min- imum dummy-arc problem was shown by Krishnamoor- thy and Deo 1131 to be NP-hard-it remains NP-hard even when the solution is restricted to be an AoA net- work having the minimum number of nodes Algorithms giving optimal solutions to the minimum-node dummy- arc problem were presented by Mrozek [I 6) and Michael el al [15] An overview of several heuristics can be found in Syslo [I71 and Michael [14J
Bein et al 131 showed that the computational effort for some advanced network-based project management techniques depends on the complexity index (C7) of a network Other applications of this new measure of net- work complexity were presented by Elmaghraby 181 and DeReyck and Herroden [ S ] In this paper we show that PERT networks with the minimum CI are highly desir- able in estimating the probability distribution of project duration by exact algorithms or conditional Monte Carlo sampling and in some bounding techniques
We also study the problem of constructing an AoA network with the minimum CI We present a polyno- mial time algorithm for solving this problem in the class of all AoA networks having the minimum number of nodes Thus for the above class minimizing the net-
work CI is much easier than is minimizing the number of dummy arcs The general network complexity prob- lem (irrespective of the number of nodes) seems to be
2000 John wdey amp Sons tnc era1 dummy arc problem (of minimizing the number of
NETWORKS Vol 36(1) 47-52 2000
dummy arcs irrespective of the number of nodes) has no published optimal algorithm
2 NETWORK COMPLEXITY INDEX
Let D = ( N A ) be a two-terminal AoA network where A = I 2 n is the set of nodes and A is the set of arcs representing both real and dummy ac- tivities We assume that parallel arcs are allowed in D and the initial and terminal nodes have numbers 1 and n respectively
Two or more parallel arcs a+ u s all leading from to j can be replaced by a unique arc a = (i j) This defines a parallel arc reduction It a = (i j ) is the unique arc into and ft = ( j k is the unique arc out of J
then these two arcs in series can be replaced by a single arc c = ik) This defines a series arc reduction
Let [Dl denote the network obtained by applying to D all possible series and parallel (s-p) we reductions If D = [Dl then D is called an 5-0 reduced network If [D consists of only one arc (1 n (the trivial network) then I) is an s-p network
We say that node j in an A-p reduced network is el- igible for node reduction when j has unit in-degree or out-degree and j 1 n Let a = ( i j ) be the unique arc into j and bi = ( j k ~ ) b = ( j kJ be the arcs out of j Then the reduction of node j replaces a b ~ bs by the arcs c = (i ki c = (i k) The case where
nodes It is evident that C ( D ) is acyclic (although not necessarily two-ierminal or connected) has no parallel arcs and CU) = C(lD1)
Bein e l al 131 showed that C O can be constructed in the time it takes to construct the transitive closure of D and proved that the CI of D is equal to the Rum- ber of nodes in a minimum node-cover of C(D Since C(D) is transitive and acyclic a minimum node-cover can be found in OM] time by reducing the minimum node-cover problem in C(gt) to the mitiinwin node-cover problem in a bipartite graph (See Ford and Fulkerson w11
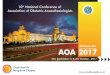
Suppose that G = (V E is the unique AoN represcn- tation of a project The dummy-arc problem is to trans- form G to D such that the number of dummy arcs in D is minimized The network complexity problem is to trans- fwm G to D such that the CI of D is minimized These two criteria are not equivalent For example Figure l(a) shows an AoN representation G while Figure Kb) and (c) each depict a different but equivalent AoA network labeled Dl and Dy Finally Figure l(d) and (e) show the complexity graphs of networks Dl and amp respectively Network Dl has five dummy ares and has the minimum CI of 2 Network D2 has only four dummy arcs but its CI is 3 The unique minimum node-cover of C(D1) is 5 6 and both node reduction sequences (5 6) and (6 5 ) are optimal for Dl j has unit out-degree is symmetric Note that in an s-p
reducednetwork~nodewhnseonvr~decessor is I or whose only successor is n i s eligible for reduction Therefore every network can be reduced to the single arc ( l n) by a sequence of node reductions interleaved with s-p arc reductions Since the number of node re- ductions in such sequences may differ it is natural to seek the fewest node reductions
More formally let Doj denote the network ob- tabled from the reduction of node j in D Then a shortest sequence of nodes ( jl ja jq) such that l[~[D~ujioji---ojJ = ( l n) defines an optimal re- duction of The length of such a sequence is called the CI of D Since ali s-p networks have zero CI the CI of a two-terminal network i s a good measure of how close it is to being s-p The CI of any D with n nodes does not exceed 11 - 3
Let ~(i j ) denote a directed path from node i to node j
Definition (Rein et at [31) The complexity graph of a network 0 = 0 denoted C(D) is defined as follows
c j ) E COO) [ie (i j ) is an arc of C(D)] if there exist paths ~i j ) - ~ i n Acircyenn [(f j) and d i j such that
7r ( i j )C I -r i ( i j )= j and 7r( i n)nv( i j )=i
Note that the paths a-iO j ) and m(f j ) may be the same The definition implies that neither 1 nor n appears as a node in CU)) and hence C O has at most n - 2
FIG 1 Minimining complexity index $5 not lhe same as mininuzing dummy arcs
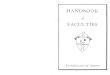
It is not generally true that every sequencing of the minimum node-cover defines an optimal reduction To il- lustrate this consider the AoA network D of Figure 2(a) Its complexity graph C(D) is depicted in Figure 2(b) The unique minimum node-cover for C ( D ) is 2 3 and only the node sequence (23) defines the optimal reduction of D This sequence can be identified by the algorithm of 131 The consecutive steps of the optimal reduction of D are presented in Figure 2(cb(f 1
3 PERT NETWORK ANALYSIS
Suppose that D = (NA) is an AoA representation of the~rojeci k t Xp be a nonnegative random variable (4 which describes the duration of activity ar acirc A and let Fr be the probability distribution function (pdf) of X so Fr( t ) - P(X -s t ] We assume that the Xr TVS are independent andP(Xr - 0) - i for all dummy activities
The project completion time T is the critical (longest) path length and the fundamental problem in analyzing PERT networks is to evaluate the pdf of 7
If D is series-parallel i t can be transformed to the single activity (1n) whose duration has the same pdf as T This can be done by performing the operations of convolution and multiplication corresponding to s-p arc reductions (See eg Elmaghraby [TI) When D is not s-p a new operation needs to be introduced If a certain activity duration is fixed to enable further s-p arc reductions then integration over a11 possible values ot me nxeu duration would give the desired result
The work of Bein et a [3 ] suggests a systematic ap- proach to fixing durations of arcs Fix the durations of the activities that correspond to single arcs (incoming or outgoing) incident with nodes eligible for reduction The minimum number of activity durations that need to be
FIG 2 An optimal reduction of an AoA network
fixed in order to transform D to the single activity (1 n) i s equal to the CI of D To illustrate assume lhal the network D of Figure
2(a) is a PERT network Reducing node 2 translates into fixing the duration of activity a by setting Xi = xi and performing further valid s-p arc reductions leads to the network D of Figure 2(d) wherc the new activities an and ai have the durations XI I = XI + X6 and X n = maxX2 vi + Xs
Next reducing node 3 translates into fixing the du- ration of activity au of D by setting Xi = x ~ This transforms D into the s-p network D of Figure 2k)
Finally the pdf of T is
where
and and stand for convolution and multiplication respective1 y
To avoid difficulties associated with the rnultiple con- ditional integration the pdf F can be estimated by
- c- - 3 l-l
1101) In thist the durations of a selected set of activities are randomly sampled according to their respective pdfs and their values fixed at the sampled values Enough arcs must he so sampled to allow the network to be reduced using only s - p arc reductions Evidently for maximum sampling efficiency we are interested in identifying the minimum set of activities sampled which again may be secured by the optimal network reduction
An optimal network reduction is hiehly desirable in implementing some techniques for bounding the pdf of the project completion time (See eg Adlakha and Kulkami [I] Dodin [6] Etmaghraby [7] Kail and Wal- lace [ I l] and Kamburows-ki 11 21) To iIuslrate consider again the PERT network of Figure 2(a) If we replace X-1 by its expected value uXt) and denote the chrre- spending completion time by T then Jensens inequal- ity yields E(T) ss ET) The subsequent replacement of X12 = rnaxXz E ( X l ) + X5 by its expected value Acircpound(XI leads to the relation EIT1] 5 ET wherc T is the cor- responding completion time Thus in order to obtain the lower bound on the expected project completion time we have replaced two rvs by their expected values in the process of converting D to W Applying the opts- mal network reduction results in the minimum number of such replacements and it has been claimed that tight bounds are then obtained (See eg [7 11 121) We also claim that the concept of an optimal network reduction i s
useful in Wallaces 1 181 method of bounding from bciow the expected time-cost curve of a PERT network
Now define the pdfs of the durations of activities flu and a12 of the network D as F I T = F I F( and F13 = F + (F Fs) while the pdfs of the remaining activities are the same as in the network D Assuming thai the activity durations of D arc independent it can be proved that PT 5 t ) -a P(T 5 t ) for every t f1671 In other words we have ignored the dependence between the TVS Xn = Xl + X6 and XT = v a a X i X i + Xs Proceeding further if we ignore the dependence between X n + XK and XI + X7 the project completion time T of D satisfies the relation PT0 5 t) -a P(T1 -s t) for every r Thus we have shown how to obtain a lower bound on the pdf of T and consequently an upper bound on Acirc pound ( T ) The minimum number of the sets of rvs whose dependence has been ignored equals the network CI and hence one may expeci that tight bounds are then derived
4 MINIMIZING THE COMPLEXITY INDEX
Suppose that G = (V E ) is the AoN network of a given project and denote the set of immediate succes- sors of activity r by S(v) and let Pk(v) be the set of all predecessors of v Assume that each activity v is rep- resented in an AoA format by an arc The sets P(sv) and P ( t v ) that include all activities that precede nodes s and t i In the constructed AoA network respec- tively are computed as follows
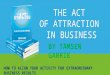
P) = Pb) and P(tv) = ampamp(w) provided that the intersection over an empty set is V Table 1 gives the sets S(v) P Y v j P (i) and P^(ti) for each activity v of the graph G in Figure 3(a)
Let Pk k = 12 n be the collection of dis- tinct SCLS from P ( s r ) ) U Puffi) Define the set of nodes of an AoA network as N = I 2 n and for each activity v assign an arc (i j ) for which P i ) = P(sy) and PG) = P(ti) The set of nodes V i s mini- mum because by construction the activities share corn- mon endpoints whenever it is possible Referring to our example Table 2 gives the sets P(i( and the activity endpoints corresponding 10 k for each node k Acirc V-
We have now constructed the AoA framework The framework includes activity arcs on the minimum node set N but no dummy arcs [See Fig 3(b)] If t for (a v ) E then a dummy path 7 r ( 4 sV) must be in- troduced to the framework to represent the immediate
(b) Framework of D
FIG 3 Minimizing the compIe~ity inden of an AoA network
precedence relation ( I ( 17) E E (A dummy path is a path c~insiiiting only of dummy arcs) To identify ail unrcp- resented immediate precedence relations its suffices to find the set R of ail node pairs in the framework that must be represented (ie connected) by dummy paths
R = ( i j ) i f and 3 ( ~ v ) acirc Acircpound such that iy = i and 5v = j
In addition we define a subset of K
(24)1 For ( f Acircyen E R I and (i k) ltk j ) E R both j A ) and k j
must be represented by dummy paths ~ i k) and nk I Since the path v(i j ) = ~ ( i k)Kk j) represents ( i j)Ri i s the subset of those pairs in R which are automatically (transitively) represented-RRl is the transitive reduc- tion of R (See Aho et al 1211
An optimum solution to the network complexity prob- lem in the class of all AoA having the minimum number of nodes is the AoA network in which all pairs of RRi are represented directly by dummy arcs This AoA net- work may be computed using the following algorithm
TABLE 2 Computing the activity arcs for the graph in Figure 3W k px MI Endpoints
I - Sir Sl 5
2 a Jti 10 3 0 b tr fh
4 ff h v Sf 1
5 fl b c f f ht IF 11 6 a b ( d e f g id ts
1 Hind the collection of distinct sets P ( k U =
l 2 n of the given sets PUfeJ and P(t ) de- fined for each v E V The corresponding set N = 12 n is the minimum set of nodes for all equiv- alent AoA networks
2 Construct the framework by assigning to each activ- ity v e V an arc ( i j ) for which Pi) = P(s and P ( j ) = P( t )
3 Add 0- j ) to R if i + j and 3(a r) 6 Acirc such that i = f Atilde
and j = I 4 Compute RR the transitive reduction of R 5 For each pair (i j ) acirc RR introduce a dummy arc
( i j ) to the framework
For the AoN network G of Figure 3(a) the algorithm finds the AoA network D of Figure 3(c) with the com- plexity graph C(D) shown in Figure 3(d) The CI of D is 2 and an optimal reduction of D is obtained by each of the following node-reduction sequences (2 3) (24) (4 21 and (4 3)
Theorem (Michael fl41) Given an AoN network G = (VE) the algorithm produces an AoA network D = ( N A) that has the minimum Ci in the class of all AoA networks with the minimum number of nodes
A proof of the theorem is sketched in the Appendix The algorithm runs in time 0(T(m)) where m = IVI
and T ( m ) is the time required to compute the transitive closure or reduction of a network (See Aho et al [2]) T(m) is known to be (3(m237) and f i (m2) ( S e e Copper- smith and Winograd [4]) Steps 1 and 2 are done by creat-
FIG 4 Minimizing complexity index i s hard when the number of node i s not restricted
ing the sets P ) and P ( t v ) from the transitive closure of G sorting them lexicographically to weed out dupli- cates and keeping track of the activities whose endpoints correspond to these sets Time for the lexicographic sort is 0 ( m q since the total size of the sets is 0(m2) Steps 4 and 5 require the transitive reduction of R note that the number of nodes in R is 0 ( m ) ~ e a c h node is the endpoint of an activity arc and m is the number of activities
The general problem of finding an AoA network with the minimum CI seems to be much more difficul~ possi- bly NP-hard and is left open Its difficulty is illustrated in Figure 4 Figure 4(a) presents the AoN of a project Figure 4(b) and (d) shows two equivalent AoA networks denoted D and D2 while the complexity graphs C(Dl ) and C(D2) are depicted in Figure 4(c) and (e) respec- tively The network Dl contains the minimum of seven nodes and has a CI of 3 secured for example by the node sequence (6745) The network D-i contains eight nodes but its CI is 2 secured by (6 7 ) or (7 6)
Appendix
To prove the theorem suppose that G is an AoN net- work and let D be the class of all equivalent AoA net- works having the minimum set of nodes 12 n All D E D contain the same framework of real activ- ity arcs and differ only in the set of dummy arcs used to connect the node pairs in R The following lemma relates dummy arcs in D to arcs in C(Dk
Lemma A1 If (i j) E R then (i j ) E C(D) for any AoA network D D
Proof k t ( i j ) R and tu = i j = s for (a v E E Since ( i j ) E R we have P V ) C R m ( j ) and $ ( j ) C S ( i ) where P v ) and S ( j ) are the sets of all activities preceding and succeeding j This implies the existence of an activity y E 5(i)Sq(j) and every path ~ ( 1 sv) does not pass through j for any D E D Since (n v) E E and G represent is only immediate precedence relations there cannot exist a path v(tp j) and in consequence every path 7r(tvn) does not pass through j for any D Acirc D ~hcrefore a path 7r(in) = 7r(isv-)(iv rv)7r(rvn)
does not pass through j Similarly one can prove that a path ~ ( 1 j ) = i ~ ( l s ~ ) ( s ~ t t ) 7 r ( t t j ) for x acirc P(jAtildeˆPf(i does not pass through i Hence (i j ) E C(D) for any D C D- rn
The algorithm constructs D E D such that D con- tains dummy arc (i j ) iff (i j ) e RRi Dummy arcs ( i j )
for (i j ) f i are not included in D because [hey are redundant
The last two lemmas use the definition of the corn- plexity graph to show that i j ) Acirc C(D ) implies that (i j ) C(D) for any D Acirc D thus proving the theorem by showing that C[D ) has the minimum cardinality node cover
Lemma A2 If 7r(i j ) and 7r- ( i n) are two paths in D such that x (i j ) fl IT (i n) = i then in any equivalent network D Acirc Igt there exist paths r(i j ) and ~ ( i n) such that di j ) n ~ ( i n ) = i
Proof Sketch If TI-( j ) and ~i-(in) consists only of dummy arcs the result follows directly from Lemma A1 and the transitivity of CW When activity arcs are interspersed we use an induction argument based on re- peated applications of Umma A 1 IQ construcE ~ ( i j ) and 7r ( f w) The key observation is the following Sup- pose that we have found i ~ ( i j ) and ~ ( i Atildesect that intersect somewhere other than at i say at I We can then always find a dummy arc (a b) that precedes x on one of the paths Various cases need to be considered but in each the fact that (a b) acirc CD) is used to find alternate paths around x An indiictioit argument is needed because the alternate paths may have a later intersection A complete proof that considers aU of the possible cases was given by Michael 1141
Lcnuna A3 If v ( i j) and ~ t j ) are two paths in D such that 7 r V ( i j ) n ir (1 J) = j then in any equiv- alent network D Acirc D there exist paths irij) and no j ) such that v(i j ) fl ~ ( 1 j ) = j
Proof Symmetric to that of Lemma A2
REFERENCES
[11 VG Adiakha and VG Kuikami A classified bibliogra- phy of research on stochastic PERT networks 1966-1987 INFOR 27 (19891 272-296
123 AV Aho JE Hopcroft and J D Ullman The design and analysis of computer algorithms Addison-Wesley Read- ing MA i974
[31 WW Bein J Kamburowski and M F M Stallmann Op- tima reduction of two-terminal directed acyclic graphs SIAM J Comput 2 1 (19921 1 1 12-1 129
141 D Coppersmith and S Winograd Matrix multiplication via arithmetic progression J Symb Comput 9 (1990) 25 1- 280-
l5J B DeReyck and W Herrdclen On the use of the complex- iiy index as a measure of complexity in activity networks Eur J Oper Res 91 (1996) 347-366
161 3 Dodin Bounding the project completion time distribu- iion in PERT networks Oper Res 33 (19851 862-881
[7] SE Eirnaghraby The estimation of some network pa- rameters in the PERT model of activity networks Review and critique Advances in Project Scheduling R Slowin- ski and J Weglar7 (Editors) Elsevier Amsterdam 1989 pp 37 1432
[$I SE Elmaghraby Resource allocation via dynamic pro- gramming in activity networks Eur J Oper Res 64 (1993) 199L-215
191 LR Ford Jr and DR Fulkerson Flows in networks Princeton University Press Princeton NJ 1962
El01 MB Garman More on conditional sampling in the sirnu- lation of stochastic networks Mgmt Sci 19 (1972) 90-95
1 I 11 P Kall and SW Wallace Stochastic programming Wiley New York 1994
(121 J Kamburowski Bounding the distribution of project du- ration in PERT networks O p r Res Lett 12 (1 992) 17-22
1131 MS Krishnamoortliy and N Deo Complexity of the minimum-dummy-activities problem in a PERT network Networks 9 ( 19791 189- 194
1141 D1- Michael Optimal representations of activity networks as directed acyclic graphs PhD Thesis Program in Oper- ations Research North Carolina Slate University Raleigh NC 1991
11 51 DJ Michael J Kamburowski and MFM Stallmann On the minimum dummy arc-problem RAIRO Oper Res 2 0993) 153-168
[ I 61 M Mrozek Transitive y reduced and transitively closed event networks Networks 16 (19S9) 331-348
[I71 MM Sysio A graph-theoretic approach EO the jump- number problem Graphs and order I Rival (Editor) Rei- deS Dordrecht 1984 pp 1 85-2 1 5
[ I81 SW Wallace Bounding the expected time-cost curve for a stochastic PERT network from beamp Oper Res Lett 8 ( 1 9891 89-94

dummy arcs irrespective of the number of nodes) has no published optimal algorithm
2 NETWORK COMPLEXITY INDEX
Let D = ( N A ) be a two-terminal AoA network where A = I 2 n is the set of nodes and A is the set of arcs representing both real and dummy ac- tivities We assume that parallel arcs are allowed in D and the initial and terminal nodes have numbers 1 and n respectively
Two or more parallel arcs a+ u s all leading from to j can be replaced by a unique arc a = (i j) This defines a parallel arc reduction It a = (i j ) is the unique arc into and ft = ( j k is the unique arc out of J
then these two arcs in series can be replaced by a single arc c = ik) This defines a series arc reduction
Let [Dl denote the network obtained by applying to D all possible series and parallel (s-p) we reductions If D = [Dl then D is called an 5-0 reduced network If [D consists of only one arc (1 n (the trivial network) then I) is an s-p network
We say that node j in an A-p reduced network is el- igible for node reduction when j has unit in-degree or out-degree and j 1 n Let a = ( i j ) be the unique arc into j and bi = ( j k ~ ) b = ( j kJ be the arcs out of j Then the reduction of node j replaces a b ~ bs by the arcs c = (i ki c = (i k) The case where
nodes It is evident that C ( D ) is acyclic (although not necessarily two-ierminal or connected) has no parallel arcs and CU) = C(lD1)
Bein e l al 131 showed that C O can be constructed in the time it takes to construct the transitive closure of D and proved that the CI of D is equal to the Rum- ber of nodes in a minimum node-cover of C(D Since C(D) is transitive and acyclic a minimum node-cover can be found in OM] time by reducing the minimum node-cover problem in C(gt) to the mitiinwin node-cover problem in a bipartite graph (See Ford and Fulkerson w11
Suppose that G = (V E is the unique AoN represcn- tation of a project The dummy-arc problem is to trans- form G to D such that the number of dummy arcs in D is minimized The network complexity problem is to trans- fwm G to D such that the CI of D is minimized These two criteria are not equivalent For example Figure l(a) shows an AoN representation G while Figure Kb) and (c) each depict a different but equivalent AoA network labeled Dl and Dy Finally Figure l(d) and (e) show the complexity graphs of networks Dl and amp respectively Network Dl has five dummy ares and has the minimum CI of 2 Network D2 has only four dummy arcs but its CI is 3 The unique minimum node-cover of C(D1) is 5 6 and both node reduction sequences (5 6) and (6 5 ) are optimal for Dl j has unit out-degree is symmetric Note that in an s-p
reducednetwork~nodewhnseonvr~decessor is I or whose only successor is n i s eligible for reduction Therefore every network can be reduced to the single arc ( l n) by a sequence of node reductions interleaved with s-p arc reductions Since the number of node re- ductions in such sequences may differ it is natural to seek the fewest node reductions
More formally let Doj denote the network ob- tabled from the reduction of node j in D Then a shortest sequence of nodes ( jl ja jq) such that l[~[D~ujioji---ojJ = ( l n) defines an optimal re- duction of The length of such a sequence is called the CI of D Since ali s-p networks have zero CI the CI of a two-terminal network i s a good measure of how close it is to being s-p The CI of any D with n nodes does not exceed 11 - 3
Let ~(i j ) denote a directed path from node i to node j
Definition (Rein et at [31) The complexity graph of a network 0 = 0 denoted C(D) is defined as follows
c j ) E COO) [ie (i j ) is an arc of C(D)] if there exist paths ~i j ) - ~ i n Acircyenn [(f j) and d i j such that
7r ( i j )C I -r i ( i j )= j and 7r( i n)nv( i j )=i
Note that the paths a-iO j ) and m(f j ) may be the same The definition implies that neither 1 nor n appears as a node in CU)) and hence C O has at most n - 2
FIG 1 Minimining complexity index $5 not lhe same as mininuzing dummy arcs
It is not generally true that every sequencing of the minimum node-cover defines an optimal reduction To il- lustrate this consider the AoA network D of Figure 2(a) Its complexity graph C(D) is depicted in Figure 2(b) The unique minimum node-cover for C ( D ) is 2 3 and only the node sequence (23) defines the optimal reduction of D This sequence can be identified by the algorithm of 131 The consecutive steps of the optimal reduction of D are presented in Figure 2(cb(f 1
3 PERT NETWORK ANALYSIS
Suppose that D = (NA) is an AoA representation of the~rojeci k t Xp be a nonnegative random variable (4 which describes the duration of activity ar acirc A and let Fr be the probability distribution function (pdf) of X so Fr( t ) - P(X -s t ] We assume that the Xr TVS are independent andP(Xr - 0) - i for all dummy activities
The project completion time T is the critical (longest) path length and the fundamental problem in analyzing PERT networks is to evaluate the pdf of 7
If D is series-parallel i t can be transformed to the single activity (1n) whose duration has the same pdf as T This can be done by performing the operations of convolution and multiplication corresponding to s-p arc reductions (See eg Elmaghraby [TI) When D is not s-p a new operation needs to be introduced If a certain activity duration is fixed to enable further s-p arc reductions then integration over a11 possible values ot me nxeu duration would give the desired result
The work of Bein et a [3 ] suggests a systematic ap- proach to fixing durations of arcs Fix the durations of the activities that correspond to single arcs (incoming or outgoing) incident with nodes eligible for reduction The minimum number of activity durations that need to be
FIG 2 An optimal reduction of an AoA network
fixed in order to transform D to the single activity (1 n) i s equal to the CI of D To illustrate assume lhal the network D of Figure
2(a) is a PERT network Reducing node 2 translates into fixing the duration of activity a by setting Xi = xi and performing further valid s-p arc reductions leads to the network D of Figure 2(d) wherc the new activities an and ai have the durations XI I = XI + X6 and X n = maxX2 vi + Xs
Next reducing node 3 translates into fixing the du- ration of activity au of D by setting Xi = x ~ This transforms D into the s-p network D of Figure 2k)
Finally the pdf of T is
where
and and stand for convolution and multiplication respective1 y
To avoid difficulties associated with the rnultiple con- ditional integration the pdf F can be estimated by
- c- - 3 l-l
1101) In thist the durations of a selected set of activities are randomly sampled according to their respective pdfs and their values fixed at the sampled values Enough arcs must he so sampled to allow the network to be reduced using only s - p arc reductions Evidently for maximum sampling efficiency we are interested in identifying the minimum set of activities sampled which again may be secured by the optimal network reduction
An optimal network reduction is hiehly desirable in implementing some techniques for bounding the pdf of the project completion time (See eg Adlakha and Kulkami [I] Dodin [6] Etmaghraby [7] Kail and Wal- lace [ I l] and Kamburows-ki 11 21) To iIuslrate consider again the PERT network of Figure 2(a) If we replace X-1 by its expected value uXt) and denote the chrre- spending completion time by T then Jensens inequal- ity yields E(T) ss ET) The subsequent replacement of X12 = rnaxXz E ( X l ) + X5 by its expected value Acircpound(XI leads to the relation EIT1] 5 ET wherc T is the cor- responding completion time Thus in order to obtain the lower bound on the expected project completion time we have replaced two rvs by their expected values in the process of converting D to W Applying the opts- mal network reduction results in the minimum number of such replacements and it has been claimed that tight bounds are then obtained (See eg [7 11 121) We also claim that the concept of an optimal network reduction i s
useful in Wallaces 1 181 method of bounding from bciow the expected time-cost curve of a PERT network
Now define the pdfs of the durations of activities flu and a12 of the network D as F I T = F I F( and F13 = F + (F Fs) while the pdfs of the remaining activities are the same as in the network D Assuming thai the activity durations of D arc independent it can be proved that PT 5 t ) -a P(T 5 t ) for every t f1671 In other words we have ignored the dependence between the TVS Xn = Xl + X6 and XT = v a a X i X i + Xs Proceeding further if we ignore the dependence between X n + XK and XI + X7 the project completion time T of D satisfies the relation PT0 5 t) -a P(T1 -s t) for every r Thus we have shown how to obtain a lower bound on the pdf of T and consequently an upper bound on Acirc pound ( T ) The minimum number of the sets of rvs whose dependence has been ignored equals the network CI and hence one may expeci that tight bounds are then derived
4 MINIMIZING THE COMPLEXITY INDEX
Suppose that G = (V E ) is the AoN network of a given project and denote the set of immediate succes- sors of activity r by S(v) and let Pk(v) be the set of all predecessors of v Assume that each activity v is rep- resented in an AoA format by an arc The sets P(sv) and P ( t v ) that include all activities that precede nodes s and t i In the constructed AoA network respec- tively are computed as follows
P) = Pb) and P(tv) = ampamp(w) provided that the intersection over an empty set is V Table 1 gives the sets S(v) P Y v j P (i) and P^(ti) for each activity v of the graph G in Figure 3(a)
Let Pk k = 12 n be the collection of dis- tinct SCLS from P ( s r ) ) U Puffi) Define the set of nodes of an AoA network as N = I 2 n and for each activity v assign an arc (i j ) for which P i ) = P(sy) and PG) = P(ti) The set of nodes V i s mini- mum because by construction the activities share corn- mon endpoints whenever it is possible Referring to our example Table 2 gives the sets P(i( and the activity endpoints corresponding 10 k for each node k Acirc V-
We have now constructed the AoA framework The framework includes activity arcs on the minimum node set N but no dummy arcs [See Fig 3(b)] If t for (a v ) E then a dummy path 7 r ( 4 sV) must be in- troduced to the framework to represent the immediate
(b) Framework of D
FIG 3 Minimizing the compIe~ity inden of an AoA network
precedence relation ( I ( 17) E E (A dummy path is a path c~insiiiting only of dummy arcs) To identify ail unrcp- resented immediate precedence relations its suffices to find the set R of ail node pairs in the framework that must be represented (ie connected) by dummy paths
R = ( i j ) i f and 3 ( ~ v ) acirc Acircpound such that iy = i and 5v = j
In addition we define a subset of K
(24)1 For ( f Acircyen E R I and (i k) ltk j ) E R both j A ) and k j
must be represented by dummy paths ~ i k) and nk I Since the path v(i j ) = ~ ( i k)Kk j) represents ( i j)Ri i s the subset of those pairs in R which are automatically (transitively) represented-RRl is the transitive reduc- tion of R (See Aho et al 1211
An optimum solution to the network complexity prob- lem in the class of all AoA having the minimum number of nodes is the AoA network in which all pairs of RRi are represented directly by dummy arcs This AoA net- work may be computed using the following algorithm
TABLE 2 Computing the activity arcs for the graph in Figure 3W k px MI Endpoints
I - Sir Sl 5
2 a Jti 10 3 0 b tr fh
4 ff h v Sf 1
5 fl b c f f ht IF 11 6 a b ( d e f g id ts
1 Hind the collection of distinct sets P ( k U =
l 2 n of the given sets PUfeJ and P(t ) de- fined for each v E V The corresponding set N = 12 n is the minimum set of nodes for all equiv- alent AoA networks
2 Construct the framework by assigning to each activ- ity v e V an arc ( i j ) for which Pi) = P(s and P ( j ) = P( t )
3 Add 0- j ) to R if i + j and 3(a r) 6 Acirc such that i = f Atilde
and j = I 4 Compute RR the transitive reduction of R 5 For each pair (i j ) acirc RR introduce a dummy arc
( i j ) to the framework
For the AoN network G of Figure 3(a) the algorithm finds the AoA network D of Figure 3(c) with the com- plexity graph C(D) shown in Figure 3(d) The CI of D is 2 and an optimal reduction of D is obtained by each of the following node-reduction sequences (2 3) (24) (4 21 and (4 3)
Theorem (Michael fl41) Given an AoN network G = (VE) the algorithm produces an AoA network D = ( N A) that has the minimum Ci in the class of all AoA networks with the minimum number of nodes
A proof of the theorem is sketched in the Appendix The algorithm runs in time 0(T(m)) where m = IVI
and T ( m ) is the time required to compute the transitive closure or reduction of a network (See Aho et al [2]) T(m) is known to be (3(m237) and f i (m2) ( S e e Copper- smith and Winograd [4]) Steps 1 and 2 are done by creat-
FIG 4 Minimizing complexity index i s hard when the number of node i s not restricted
ing the sets P ) and P ( t v ) from the transitive closure of G sorting them lexicographically to weed out dupli- cates and keeping track of the activities whose endpoints correspond to these sets Time for the lexicographic sort is 0 ( m q since the total size of the sets is 0(m2) Steps 4 and 5 require the transitive reduction of R note that the number of nodes in R is 0 ( m ) ~ e a c h node is the endpoint of an activity arc and m is the number of activities
The general problem of finding an AoA network with the minimum CI seems to be much more difficul~ possi- bly NP-hard and is left open Its difficulty is illustrated in Figure 4 Figure 4(a) presents the AoN of a project Figure 4(b) and (d) shows two equivalent AoA networks denoted D and D2 while the complexity graphs C(Dl ) and C(D2) are depicted in Figure 4(c) and (e) respec- tively The network Dl contains the minimum of seven nodes and has a CI of 3 secured for example by the node sequence (6745) The network D-i contains eight nodes but its CI is 2 secured by (6 7 ) or (7 6)
Appendix
To prove the theorem suppose that G is an AoN net- work and let D be the class of all equivalent AoA net- works having the minimum set of nodes 12 n All D E D contain the same framework of real activ- ity arcs and differ only in the set of dummy arcs used to connect the node pairs in R The following lemma relates dummy arcs in D to arcs in C(Dk
Lemma A1 If (i j) E R then (i j ) E C(D) for any AoA network D D
Proof k t ( i j ) R and tu = i j = s for (a v E E Since ( i j ) E R we have P V ) C R m ( j ) and $ ( j ) C S ( i ) where P v ) and S ( j ) are the sets of all activities preceding and succeeding j This implies the existence of an activity y E 5(i)Sq(j) and every path ~ ( 1 sv) does not pass through j for any D E D Since (n v) E E and G represent is only immediate precedence relations there cannot exist a path v(tp j) and in consequence every path 7r(tvn) does not pass through j for any D Acirc D ~hcrefore a path 7r(in) = 7r(isv-)(iv rv)7r(rvn)
does not pass through j Similarly one can prove that a path ~ ( 1 j ) = i ~ ( l s ~ ) ( s ~ t t ) 7 r ( t t j ) for x acirc P(jAtildeˆPf(i does not pass through i Hence (i j ) E C(D) for any D C D- rn
The algorithm constructs D E D such that D con- tains dummy arc (i j ) iff (i j ) e RRi Dummy arcs ( i j )
for (i j ) f i are not included in D because [hey are redundant
The last two lemmas use the definition of the corn- plexity graph to show that i j ) Acirc C(D ) implies that (i j ) C(D) for any D Acirc D thus proving the theorem by showing that C[D ) has the minimum cardinality node cover
Lemma A2 If 7r(i j ) and 7r- ( i n) are two paths in D such that x (i j ) fl IT (i n) = i then in any equivalent network D Acirc Igt there exist paths r(i j ) and ~ ( i n) such that di j ) n ~ ( i n ) = i
Proof Sketch If TI-( j ) and ~i-(in) consists only of dummy arcs the result follows directly from Lemma A1 and the transitivity of CW When activity arcs are interspersed we use an induction argument based on re- peated applications of Umma A 1 IQ construcE ~ ( i j ) and 7r ( f w) The key observation is the following Sup- pose that we have found i ~ ( i j ) and ~ ( i Atildesect that intersect somewhere other than at i say at I We can then always find a dummy arc (a b) that precedes x on one of the paths Various cases need to be considered but in each the fact that (a b) acirc CD) is used to find alternate paths around x An indiictioit argument is needed because the alternate paths may have a later intersection A complete proof that considers aU of the possible cases was given by Michael 1141
Lcnuna A3 If v ( i j) and ~ t j ) are two paths in D such that 7 r V ( i j ) n ir (1 J) = j then in any equiv- alent network D Acirc D there exist paths irij) and no j ) such that v(i j ) fl ~ ( 1 j ) = j
Proof Symmetric to that of Lemma A2
REFERENCES
[11 VG Adiakha and VG Kuikami A classified bibliogra- phy of research on stochastic PERT networks 1966-1987 INFOR 27 (19891 272-296
123 AV Aho JE Hopcroft and J D Ullman The design and analysis of computer algorithms Addison-Wesley Read- ing MA i974
[31 WW Bein J Kamburowski and M F M Stallmann Op- tima reduction of two-terminal directed acyclic graphs SIAM J Comput 2 1 (19921 1 1 12-1 129
141 D Coppersmith and S Winograd Matrix multiplication via arithmetic progression J Symb Comput 9 (1990) 25 1- 280-
l5J B DeReyck and W Herrdclen On the use of the complex- iiy index as a measure of complexity in activity networks Eur J Oper Res 91 (1996) 347-366
161 3 Dodin Bounding the project completion time distribu- iion in PERT networks Oper Res 33 (19851 862-881
[7] SE Eirnaghraby The estimation of some network pa- rameters in the PERT model of activity networks Review and critique Advances in Project Scheduling R Slowin- ski and J Weglar7 (Editors) Elsevier Amsterdam 1989 pp 37 1432
[$I SE Elmaghraby Resource allocation via dynamic pro- gramming in activity networks Eur J Oper Res 64 (1993) 199L-215
191 LR Ford Jr and DR Fulkerson Flows in networks Princeton University Press Princeton NJ 1962
El01 MB Garman More on conditional sampling in the sirnu- lation of stochastic networks Mgmt Sci 19 (1972) 90-95
1 I 11 P Kall and SW Wallace Stochastic programming Wiley New York 1994
(121 J Kamburowski Bounding the distribution of project du- ration in PERT networks O p r Res Lett 12 (1 992) 17-22
1131 MS Krishnamoortliy and N Deo Complexity of the minimum-dummy-activities problem in a PERT network Networks 9 ( 19791 189- 194
1141 D1- Michael Optimal representations of activity networks as directed acyclic graphs PhD Thesis Program in Oper- ations Research North Carolina Slate University Raleigh NC 1991
11 51 DJ Michael J Kamburowski and MFM Stallmann On the minimum dummy arc-problem RAIRO Oper Res 2 0993) 153-168
[ I 61 M Mrozek Transitive y reduced and transitively closed event networks Networks 16 (19S9) 331-348
[I71 MM Sysio A graph-theoretic approach EO the jump- number problem Graphs and order I Rival (Editor) Rei- deS Dordrecht 1984 pp 1 85-2 1 5
[ I81 SW Wallace Bounding the expected time-cost curve for a stochastic PERT network from beamp Oper Res Lett 8 ( 1 9891 89-94

It is not generally true that every sequencing of the minimum node-cover defines an optimal reduction To il- lustrate this consider the AoA network D of Figure 2(a) Its complexity graph C(D) is depicted in Figure 2(b) The unique minimum node-cover for C ( D ) is 2 3 and only the node sequence (23) defines the optimal reduction of D This sequence can be identified by the algorithm of 131 The consecutive steps of the optimal reduction of D are presented in Figure 2(cb(f 1
3 PERT NETWORK ANALYSIS
Suppose that D = (NA) is an AoA representation of the~rojeci k t Xp be a nonnegative random variable (4 which describes the duration of activity ar acirc A and let Fr be the probability distribution function (pdf) of X so Fr( t ) - P(X -s t ] We assume that the Xr TVS are independent andP(Xr - 0) - i for all dummy activities
The project completion time T is the critical (longest) path length and the fundamental problem in analyzing PERT networks is to evaluate the pdf of 7
If D is series-parallel i t can be transformed to the single activity (1n) whose duration has the same pdf as T This can be done by performing the operations of convolution and multiplication corresponding to s-p arc reductions (See eg Elmaghraby [TI) When D is not s-p a new operation needs to be introduced If a certain activity duration is fixed to enable further s-p arc reductions then integration over a11 possible values ot me nxeu duration would give the desired result
The work of Bein et a [3 ] suggests a systematic ap- proach to fixing durations of arcs Fix the durations of the activities that correspond to single arcs (incoming or outgoing) incident with nodes eligible for reduction The minimum number of activity durations that need to be
FIG 2 An optimal reduction of an AoA network
fixed in order to transform D to the single activity (1 n) i s equal to the CI of D To illustrate assume lhal the network D of Figure
2(a) is a PERT network Reducing node 2 translates into fixing the duration of activity a by setting Xi = xi and performing further valid s-p arc reductions leads to the network D of Figure 2(d) wherc the new activities an and ai have the durations XI I = XI + X6 and X n = maxX2 vi + Xs
Next reducing node 3 translates into fixing the du- ration of activity au of D by setting Xi = x ~ This transforms D into the s-p network D of Figure 2k)
Finally the pdf of T is
where
and and stand for convolution and multiplication respective1 y
To avoid difficulties associated with the rnultiple con- ditional integration the pdf F can be estimated by
- c- - 3 l-l
1101) In thist the durations of a selected set of activities are randomly sampled according to their respective pdfs and their values fixed at the sampled values Enough arcs must he so sampled to allow the network to be reduced using only s - p arc reductions Evidently for maximum sampling efficiency we are interested in identifying the minimum set of activities sampled which again may be secured by the optimal network reduction
An optimal network reduction is hiehly desirable in implementing some techniques for bounding the pdf of the project completion time (See eg Adlakha and Kulkami [I] Dodin [6] Etmaghraby [7] Kail and Wal- lace [ I l] and Kamburows-ki 11 21) To iIuslrate consider again the PERT network of Figure 2(a) If we replace X-1 by its expected value uXt) and denote the chrre- spending completion time by T then Jensens inequal- ity yields E(T) ss ET) The subsequent replacement of X12 = rnaxXz E ( X l ) + X5 by its expected value Acircpound(XI leads to the relation EIT1] 5 ET wherc T is the cor- responding completion time Thus in order to obtain the lower bound on the expected project completion time we have replaced two rvs by their expected values in the process of converting D to W Applying the opts- mal network reduction results in the minimum number of such replacements and it has been claimed that tight bounds are then obtained (See eg [7 11 121) We also claim that the concept of an optimal network reduction i s
useful in Wallaces 1 181 method of bounding from bciow the expected time-cost curve of a PERT network
Now define the pdfs of the durations of activities flu and a12 of the network D as F I T = F I F( and F13 = F + (F Fs) while the pdfs of the remaining activities are the same as in the network D Assuming thai the activity durations of D arc independent it can be proved that PT 5 t ) -a P(T 5 t ) for every t f1671 In other words we have ignored the dependence between the TVS Xn = Xl + X6 and XT = v a a X i X i + Xs Proceeding further if we ignore the dependence between X n + XK and XI + X7 the project completion time T of D satisfies the relation PT0 5 t) -a P(T1 -s t) for every r Thus we have shown how to obtain a lower bound on the pdf of T and consequently an upper bound on Acirc pound ( T ) The minimum number of the sets of rvs whose dependence has been ignored equals the network CI and hence one may expeci that tight bounds are then derived
4 MINIMIZING THE COMPLEXITY INDEX
Suppose that G = (V E ) is the AoN network of a given project and denote the set of immediate succes- sors of activity r by S(v) and let Pk(v) be the set of all predecessors of v Assume that each activity v is rep- resented in an AoA format by an arc The sets P(sv) and P ( t v ) that include all activities that precede nodes s and t i In the constructed AoA network respec- tively are computed as follows
P) = Pb) and P(tv) = ampamp(w) provided that the intersection over an empty set is V Table 1 gives the sets S(v) P Y v j P (i) and P^(ti) for each activity v of the graph G in Figure 3(a)
Let Pk k = 12 n be the collection of dis- tinct SCLS from P ( s r ) ) U Puffi) Define the set of nodes of an AoA network as N = I 2 n and for each activity v assign an arc (i j ) for which P i ) = P(sy) and PG) = P(ti) The set of nodes V i s mini- mum because by construction the activities share corn- mon endpoints whenever it is possible Referring to our example Table 2 gives the sets P(i( and the activity endpoints corresponding 10 k for each node k Acirc V-
We have now constructed the AoA framework The framework includes activity arcs on the minimum node set N but no dummy arcs [See Fig 3(b)] If t for (a v ) E then a dummy path 7 r ( 4 sV) must be in- troduced to the framework to represent the immediate
(b) Framework of D
FIG 3 Minimizing the compIe~ity inden of an AoA network
precedence relation ( I ( 17) E E (A dummy path is a path c~insiiiting only of dummy arcs) To identify ail unrcp- resented immediate precedence relations its suffices to find the set R of ail node pairs in the framework that must be represented (ie connected) by dummy paths
R = ( i j ) i f and 3 ( ~ v ) acirc Acircpound such that iy = i and 5v = j
In addition we define a subset of K
(24)1 For ( f Acircyen E R I and (i k) ltk j ) E R both j A ) and k j
must be represented by dummy paths ~ i k) and nk I Since the path v(i j ) = ~ ( i k)Kk j) represents ( i j)Ri i s the subset of those pairs in R which are automatically (transitively) represented-RRl is the transitive reduc- tion of R (See Aho et al 1211
An optimum solution to the network complexity prob- lem in the class of all AoA having the minimum number of nodes is the AoA network in which all pairs of RRi are represented directly by dummy arcs This AoA net- work may be computed using the following algorithm
TABLE 2 Computing the activity arcs for the graph in Figure 3W k px MI Endpoints
I - Sir Sl 5
2 a Jti 10 3 0 b tr fh
4 ff h v Sf 1
5 fl b c f f ht IF 11 6 a b ( d e f g id ts
1 Hind the collection of distinct sets P ( k U =
l 2 n of the given sets PUfeJ and P(t ) de- fined for each v E V The corresponding set N = 12 n is the minimum set of nodes for all equiv- alent AoA networks
2 Construct the framework by assigning to each activ- ity v e V an arc ( i j ) for which Pi) = P(s and P ( j ) = P( t )
3 Add 0- j ) to R if i + j and 3(a r) 6 Acirc such that i = f Atilde
and j = I 4 Compute RR the transitive reduction of R 5 For each pair (i j ) acirc RR introduce a dummy arc
( i j ) to the framework
For the AoN network G of Figure 3(a) the algorithm finds the AoA network D of Figure 3(c) with the com- plexity graph C(D) shown in Figure 3(d) The CI of D is 2 and an optimal reduction of D is obtained by each of the following node-reduction sequences (2 3) (24) (4 21 and (4 3)
Theorem (Michael fl41) Given an AoN network G = (VE) the algorithm produces an AoA network D = ( N A) that has the minimum Ci in the class of all AoA networks with the minimum number of nodes
A proof of the theorem is sketched in the Appendix The algorithm runs in time 0(T(m)) where m = IVI
and T ( m ) is the time required to compute the transitive closure or reduction of a network (See Aho et al [2]) T(m) is known to be (3(m237) and f i (m2) ( S e e Copper- smith and Winograd [4]) Steps 1 and 2 are done by creat-
FIG 4 Minimizing complexity index i s hard when the number of node i s not restricted
ing the sets P ) and P ( t v ) from the transitive closure of G sorting them lexicographically to weed out dupli- cates and keeping track of the activities whose endpoints correspond to these sets Time for the lexicographic sort is 0 ( m q since the total size of the sets is 0(m2) Steps 4 and 5 require the transitive reduction of R note that the number of nodes in R is 0 ( m ) ~ e a c h node is the endpoint of an activity arc and m is the number of activities
The general problem of finding an AoA network with the minimum CI seems to be much more difficul~ possi- bly NP-hard and is left open Its difficulty is illustrated in Figure 4 Figure 4(a) presents the AoN of a project Figure 4(b) and (d) shows two equivalent AoA networks denoted D and D2 while the complexity graphs C(Dl ) and C(D2) are depicted in Figure 4(c) and (e) respec- tively The network Dl contains the minimum of seven nodes and has a CI of 3 secured for example by the node sequence (6745) The network D-i contains eight nodes but its CI is 2 secured by (6 7 ) or (7 6)
Appendix
To prove the theorem suppose that G is an AoN net- work and let D be the class of all equivalent AoA net- works having the minimum set of nodes 12 n All D E D contain the same framework of real activ- ity arcs and differ only in the set of dummy arcs used to connect the node pairs in R The following lemma relates dummy arcs in D to arcs in C(Dk
Lemma A1 If (i j) E R then (i j ) E C(D) for any AoA network D D
Proof k t ( i j ) R and tu = i j = s for (a v E E Since ( i j ) E R we have P V ) C R m ( j ) and $ ( j ) C S ( i ) where P v ) and S ( j ) are the sets of all activities preceding and succeeding j This implies the existence of an activity y E 5(i)Sq(j) and every path ~ ( 1 sv) does not pass through j for any D E D Since (n v) E E and G represent is only immediate precedence relations there cannot exist a path v(tp j) and in consequence every path 7r(tvn) does not pass through j for any D Acirc D ~hcrefore a path 7r(in) = 7r(isv-)(iv rv)7r(rvn)
does not pass through j Similarly one can prove that a path ~ ( 1 j ) = i ~ ( l s ~ ) ( s ~ t t ) 7 r ( t t j ) for x acirc P(jAtildeˆPf(i does not pass through i Hence (i j ) E C(D) for any D C D- rn
The algorithm constructs D E D such that D con- tains dummy arc (i j ) iff (i j ) e RRi Dummy arcs ( i j )
for (i j ) f i are not included in D because [hey are redundant
The last two lemmas use the definition of the corn- plexity graph to show that i j ) Acirc C(D ) implies that (i j ) C(D) for any D Acirc D thus proving the theorem by showing that C[D ) has the minimum cardinality node cover
Lemma A2 If 7r(i j ) and 7r- ( i n) are two paths in D such that x (i j ) fl IT (i n) = i then in any equivalent network D Acirc Igt there exist paths r(i j ) and ~ ( i n) such that di j ) n ~ ( i n ) = i
Proof Sketch If TI-( j ) and ~i-(in) consists only of dummy arcs the result follows directly from Lemma A1 and the transitivity of CW When activity arcs are interspersed we use an induction argument based on re- peated applications of Umma A 1 IQ construcE ~ ( i j ) and 7r ( f w) The key observation is the following Sup- pose that we have found i ~ ( i j ) and ~ ( i Atildesect that intersect somewhere other than at i say at I We can then always find a dummy arc (a b) that precedes x on one of the paths Various cases need to be considered but in each the fact that (a b) acirc CD) is used to find alternate paths around x An indiictioit argument is needed because the alternate paths may have a later intersection A complete proof that considers aU of the possible cases was given by Michael 1141
Lcnuna A3 If v ( i j) and ~ t j ) are two paths in D such that 7 r V ( i j ) n ir (1 J) = j then in any equiv- alent network D Acirc D there exist paths irij) and no j ) such that v(i j ) fl ~ ( 1 j ) = j
Proof Symmetric to that of Lemma A2
REFERENCES
[11 VG Adiakha and VG Kuikami A classified bibliogra- phy of research on stochastic PERT networks 1966-1987 INFOR 27 (19891 272-296
123 AV Aho JE Hopcroft and J D Ullman The design and analysis of computer algorithms Addison-Wesley Read- ing MA i974
[31 WW Bein J Kamburowski and M F M Stallmann Op- tima reduction of two-terminal directed acyclic graphs SIAM J Comput 2 1 (19921 1 1 12-1 129
141 D Coppersmith and S Winograd Matrix multiplication via arithmetic progression J Symb Comput 9 (1990) 25 1- 280-
l5J B DeReyck and W Herrdclen On the use of the complex- iiy index as a measure of complexity in activity networks Eur J Oper Res 91 (1996) 347-366
161 3 Dodin Bounding the project completion time distribu- iion in PERT networks Oper Res 33 (19851 862-881
[7] SE Eirnaghraby The estimation of some network pa- rameters in the PERT model of activity networks Review and critique Advances in Project Scheduling R Slowin- ski and J Weglar7 (Editors) Elsevier Amsterdam 1989 pp 37 1432
[$I SE Elmaghraby Resource allocation via dynamic pro- gramming in activity networks Eur J Oper Res 64 (1993) 199L-215
191 LR Ford Jr and DR Fulkerson Flows in networks Princeton University Press Princeton NJ 1962
El01 MB Garman More on conditional sampling in the sirnu- lation of stochastic networks Mgmt Sci 19 (1972) 90-95
1 I 11 P Kall and SW Wallace Stochastic programming Wiley New York 1994
(121 J Kamburowski Bounding the distribution of project du- ration in PERT networks O p r Res Lett 12 (1 992) 17-22
1131 MS Krishnamoortliy and N Deo Complexity of the minimum-dummy-activities problem in a PERT network Networks 9 ( 19791 189- 194
1141 D1- Michael Optimal representations of activity networks as directed acyclic graphs PhD Thesis Program in Oper- ations Research North Carolina Slate University Raleigh NC 1991
11 51 DJ Michael J Kamburowski and MFM Stallmann On the minimum dummy arc-problem RAIRO Oper Res 2 0993) 153-168
[ I 61 M Mrozek Transitive y reduced and transitively closed event networks Networks 16 (19S9) 331-348
[I71 MM Sysio A graph-theoretic approach EO the jump- number problem Graphs and order I Rival (Editor) Rei- deS Dordrecht 1984 pp 1 85-2 1 5
[ I81 SW Wallace Bounding the expected time-cost curve for a stochastic PERT network from beamp Oper Res Lett 8 ( 1 9891 89-94

useful in Wallaces 1 181 method of bounding from bciow the expected time-cost curve of a PERT network
Now define the pdfs of the durations of activities flu and a12 of the network D as F I T = F I F( and F13 = F + (F Fs) while the pdfs of the remaining activities are the same as in the network D Assuming thai the activity durations of D arc independent it can be proved that PT 5 t ) -a P(T 5 t ) for every t f1671 In other words we have ignored the dependence between the TVS Xn = Xl + X6 and XT = v a a X i X i + Xs Proceeding further if we ignore the dependence between X n + XK and XI + X7 the project completion time T of D satisfies the relation PT0 5 t) -a P(T1 -s t) for every r Thus we have shown how to obtain a lower bound on the pdf of T and consequently an upper bound on Acirc pound ( T ) The minimum number of the sets of rvs whose dependence has been ignored equals the network CI and hence one may expeci that tight bounds are then derived
4 MINIMIZING THE COMPLEXITY INDEX
Suppose that G = (V E ) is the AoN network of a given project and denote the set of immediate succes- sors of activity r by S(v) and let Pk(v) be the set of all predecessors of v Assume that each activity v is rep- resented in an AoA format by an arc The sets P(sv) and P ( t v ) that include all activities that precede nodes s and t i In the constructed AoA network respec- tively are computed as follows
P) = Pb) and P(tv) = ampamp(w) provided that the intersection over an empty set is V Table 1 gives the sets S(v) P Y v j P (i) and P^(ti) for each activity v of the graph G in Figure 3(a)
Let Pk k = 12 n be the collection of dis- tinct SCLS from P ( s r ) ) U Puffi) Define the set of nodes of an AoA network as N = I 2 n and for each activity v assign an arc (i j ) for which P i ) = P(sy) and PG) = P(ti) The set of nodes V i s mini- mum because by construction the activities share corn- mon endpoints whenever it is possible Referring to our example Table 2 gives the sets P(i( and the activity endpoints corresponding 10 k for each node k Acirc V-
We have now constructed the AoA framework The framework includes activity arcs on the minimum node set N but no dummy arcs [See Fig 3(b)] If t for (a v ) E then a dummy path 7 r ( 4 sV) must be in- troduced to the framework to represent the immediate
(b) Framework of D
FIG 3 Minimizing the compIe~ity inden of an AoA network
precedence relation ( I ( 17) E E (A dummy path is a path c~insiiiting only of dummy arcs) To identify ail unrcp- resented immediate precedence relations its suffices to find the set R of ail node pairs in the framework that must be represented (ie connected) by dummy paths
R = ( i j ) i f and 3 ( ~ v ) acirc Acircpound such that iy = i and 5v = j
In addition we define a subset of K
(24)1 For ( f Acircyen E R I and (i k) ltk j ) E R both j A ) and k j
must be represented by dummy paths ~ i k) and nk I Since the path v(i j ) = ~ ( i k)Kk j) represents ( i j)Ri i s the subset of those pairs in R which are automatically (transitively) represented-RRl is the transitive reduc- tion of R (See Aho et al 1211
An optimum solution to the network complexity prob- lem in the class of all AoA having the minimum number of nodes is the AoA network in which all pairs of RRi are represented directly by dummy arcs This AoA net- work may be computed using the following algorithm
TABLE 2 Computing the activity arcs for the graph in Figure 3W k px MI Endpoints
I - Sir Sl 5
2 a Jti 10 3 0 b tr fh
4 ff h v Sf 1
5 fl b c f f ht IF 11 6 a b ( d e f g id ts
1 Hind the collection of distinct sets P ( k U =
l 2 n of the given sets PUfeJ and P(t ) de- fined for each v E V The corresponding set N = 12 n is the minimum set of nodes for all equiv- alent AoA networks
2 Construct the framework by assigning to each activ- ity v e V an arc ( i j ) for which Pi) = P(s and P ( j ) = P( t )
3 Add 0- j ) to R if i + j and 3(a r) 6 Acirc such that i = f Atilde
and j = I 4 Compute RR the transitive reduction of R 5 For each pair (i j ) acirc RR introduce a dummy arc
( i j ) to the framework
For the AoN network G of Figure 3(a) the algorithm finds the AoA network D of Figure 3(c) with the com- plexity graph C(D) shown in Figure 3(d) The CI of D is 2 and an optimal reduction of D is obtained by each of the following node-reduction sequences (2 3) (24) (4 21 and (4 3)
Theorem (Michael fl41) Given an AoN network G = (VE) the algorithm produces an AoA network D = ( N A) that has the minimum Ci in the class of all AoA networks with the minimum number of nodes
A proof of the theorem is sketched in the Appendix The algorithm runs in time 0(T(m)) where m = IVI
and T ( m ) is the time required to compute the transitive closure or reduction of a network (See Aho et al [2]) T(m) is known to be (3(m237) and f i (m2) ( S e e Copper- smith and Winograd [4]) Steps 1 and 2 are done by creat-
FIG 4 Minimizing complexity index i s hard when the number of node i s not restricted
ing the sets P ) and P ( t v ) from the transitive closure of G sorting them lexicographically to weed out dupli- cates and keeping track of the activities whose endpoints correspond to these sets Time for the lexicographic sort is 0 ( m q since the total size of the sets is 0(m2) Steps 4 and 5 require the transitive reduction of R note that the number of nodes in R is 0 ( m ) ~ e a c h node is the endpoint of an activity arc and m is the number of activities
The general problem of finding an AoA network with the minimum CI seems to be much more difficul~ possi- bly NP-hard and is left open Its difficulty is illustrated in Figure 4 Figure 4(a) presents the AoN of a project Figure 4(b) and (d) shows two equivalent AoA networks denoted D and D2 while the complexity graphs C(Dl ) and C(D2) are depicted in Figure 4(c) and (e) respec- tively The network Dl contains the minimum of seven nodes and has a CI of 3 secured for example by the node sequence (6745) The network D-i contains eight nodes but its CI is 2 secured by (6 7 ) or (7 6)
Appendix
To prove the theorem suppose that G is an AoN net- work and let D be the class of all equivalent AoA net- works having the minimum set of nodes 12 n All D E D contain the same framework of real activ- ity arcs and differ only in the set of dummy arcs used to connect the node pairs in R The following lemma relates dummy arcs in D to arcs in C(Dk
Lemma A1 If (i j) E R then (i j ) E C(D) for any AoA network D D
Proof k t ( i j ) R and tu = i j = s for (a v E E Since ( i j ) E R we have P V ) C R m ( j ) and $ ( j ) C S ( i ) where P v ) and S ( j ) are the sets of all activities preceding and succeeding j This implies the existence of an activity y E 5(i)Sq(j) and every path ~ ( 1 sv) does not pass through j for any D E D Since (n v) E E and G represent is only immediate precedence relations there cannot exist a path v(tp j) and in consequence every path 7r(tvn) does not pass through j for any D Acirc D ~hcrefore a path 7r(in) = 7r(isv-)(iv rv)7r(rvn)
does not pass through j Similarly one can prove that a path ~ ( 1 j ) = i ~ ( l s ~ ) ( s ~ t t ) 7 r ( t t j ) for x acirc P(jAtildeˆPf(i does not pass through i Hence (i j ) E C(D) for any D C D- rn
The algorithm constructs D E D such that D con- tains dummy arc (i j ) iff (i j ) e RRi Dummy arcs ( i j )
for (i j ) f i are not included in D because [hey are redundant
The last two lemmas use the definition of the corn- plexity graph to show that i j ) Acirc C(D ) implies that (i j ) C(D) for any D Acirc D thus proving the theorem by showing that C[D ) has the minimum cardinality node cover
Lemma A2 If 7r(i j ) and 7r- ( i n) are two paths in D such that x (i j ) fl IT (i n) = i then in any equivalent network D Acirc Igt there exist paths r(i j ) and ~ ( i n) such that di j ) n ~ ( i n ) = i
Proof Sketch If TI-( j ) and ~i-(in) consists only of dummy arcs the result follows directly from Lemma A1 and the transitivity of CW When activity arcs are interspersed we use an induction argument based on re- peated applications of Umma A 1 IQ construcE ~ ( i j ) and 7r ( f w) The key observation is the following Sup- pose that we have found i ~ ( i j ) and ~ ( i Atildesect that intersect somewhere other than at i say at I We can then always find a dummy arc (a b) that precedes x on one of the paths Various cases need to be considered but in each the fact that (a b) acirc CD) is used to find alternate paths around x An indiictioit argument is needed because the alternate paths may have a later intersection A complete proof that considers aU of the possible cases was given by Michael 1141
Lcnuna A3 If v ( i j) and ~ t j ) are two paths in D such that 7 r V ( i j ) n ir (1 J) = j then in any equiv- alent network D Acirc D there exist paths irij) and no j ) such that v(i j ) fl ~ ( 1 j ) = j
Proof Symmetric to that of Lemma A2
REFERENCES
[11 VG Adiakha and VG Kuikami A classified bibliogra- phy of research on stochastic PERT networks 1966-1987 INFOR 27 (19891 272-296
123 AV Aho JE Hopcroft and J D Ullman The design and analysis of computer algorithms Addison-Wesley Read- ing MA i974
[31 WW Bein J Kamburowski and M F M Stallmann Op- tima reduction of two-terminal directed acyclic graphs SIAM J Comput 2 1 (19921 1 1 12-1 129
141 D Coppersmith and S Winograd Matrix multiplication via arithmetic progression J Symb Comput 9 (1990) 25 1- 280-
l5J B DeReyck and W Herrdclen On the use of the complex- iiy index as a measure of complexity in activity networks Eur J Oper Res 91 (1996) 347-366
161 3 Dodin Bounding the project completion time distribu- iion in PERT networks Oper Res 33 (19851 862-881
[7] SE Eirnaghraby The estimation of some network pa- rameters in the PERT model of activity networks Review and critique Advances in Project Scheduling R Slowin- ski and J Weglar7 (Editors) Elsevier Amsterdam 1989 pp 37 1432
[$I SE Elmaghraby Resource allocation via dynamic pro- gramming in activity networks Eur J Oper Res 64 (1993) 199L-215
191 LR Ford Jr and DR Fulkerson Flows in networks Princeton University Press Princeton NJ 1962
El01 MB Garman More on conditional sampling in the sirnu- lation of stochastic networks Mgmt Sci 19 (1972) 90-95
1 I 11 P Kall and SW Wallace Stochastic programming Wiley New York 1994
(121 J Kamburowski Bounding the distribution of project du- ration in PERT networks O p r Res Lett 12 (1 992) 17-22
1131 MS Krishnamoortliy and N Deo Complexity of the minimum-dummy-activities problem in a PERT network Networks 9 ( 19791 189- 194
1141 D1- Michael Optimal representations of activity networks as directed acyclic graphs PhD Thesis Program in Oper- ations Research North Carolina Slate University Raleigh NC 1991
11 51 DJ Michael J Kamburowski and MFM Stallmann On the minimum dummy arc-problem RAIRO Oper Res 2 0993) 153-168
[ I 61 M Mrozek Transitive y reduced and transitively closed event networks Networks 16 (19S9) 331-348
[I71 MM Sysio A graph-theoretic approach EO the jump- number problem Graphs and order I Rival (Editor) Rei- deS Dordrecht 1984 pp 1 85-2 1 5
[ I81 SW Wallace Bounding the expected time-cost curve for a stochastic PERT network from beamp Oper Res Lett 8 ( 1 9891 89-94

1 Hind the collection of distinct sets P ( k U =
l 2 n of the given sets PUfeJ and P(t ) de- fined for each v E V The corresponding set N = 12 n is the minimum set of nodes for all equiv- alent AoA networks
2 Construct the framework by assigning to each activ- ity v e V an arc ( i j ) for which Pi) = P(s and P ( j ) = P( t )
3 Add 0- j ) to R if i + j and 3(a r) 6 Acirc such that i = f Atilde
and j = I 4 Compute RR the transitive reduction of R 5 For each pair (i j ) acirc RR introduce a dummy arc
( i j ) to the framework
For the AoN network G of Figure 3(a) the algorithm finds the AoA network D of Figure 3(c) with the com- plexity graph C(D) shown in Figure 3(d) The CI of D is 2 and an optimal reduction of D is obtained by each of the following node-reduction sequences (2 3) (24) (4 21 and (4 3)
Theorem (Michael fl41) Given an AoN network G = (VE) the algorithm produces an AoA network D = ( N A) that has the minimum Ci in the class of all AoA networks with the minimum number of nodes
A proof of the theorem is sketched in the Appendix The algorithm runs in time 0(T(m)) where m = IVI
and T ( m ) is the time required to compute the transitive closure or reduction of a network (See Aho et al [2]) T(m) is known to be (3(m237) and f i (m2) ( S e e Copper- smith and Winograd [4]) Steps 1 and 2 are done by creat-
FIG 4 Minimizing complexity index i s hard when the number of node i s not restricted
ing the sets P ) and P ( t v ) from the transitive closure of G sorting them lexicographically to weed out dupli- cates and keeping track of the activities whose endpoints correspond to these sets Time for the lexicographic sort is 0 ( m q since the total size of the sets is 0(m2) Steps 4 and 5 require the transitive reduction of R note that the number of nodes in R is 0 ( m ) ~ e a c h node is the endpoint of an activity arc and m is the number of activities
The general problem of finding an AoA network with the minimum CI seems to be much more difficul~ possi- bly NP-hard and is left open Its difficulty is illustrated in Figure 4 Figure 4(a) presents the AoN of a project Figure 4(b) and (d) shows two equivalent AoA networks denoted D and D2 while the complexity graphs C(Dl ) and C(D2) are depicted in Figure 4(c) and (e) respec- tively The network Dl contains the minimum of seven nodes and has a CI of 3 secured for example by the node sequence (6745) The network D-i contains eight nodes but its CI is 2 secured by (6 7 ) or (7 6)
Appendix
To prove the theorem suppose that G is an AoN net- work and let D be the class of all equivalent AoA net- works having the minimum set of nodes 12 n All D E D contain the same framework of real activ- ity arcs and differ only in the set of dummy arcs used to connect the node pairs in R The following lemma relates dummy arcs in D to arcs in C(Dk
Lemma A1 If (i j) E R then (i j ) E C(D) for any AoA network D D
Proof k t ( i j ) R and tu = i j = s for (a v E E Since ( i j ) E R we have P V ) C R m ( j ) and $ ( j ) C S ( i ) where P v ) and S ( j ) are the sets of all activities preceding and succeeding j This implies the existence of an activity y E 5(i)Sq(j) and every path ~ ( 1 sv) does not pass through j for any D E D Since (n v) E E and G represent is only immediate precedence relations there cannot exist a path v(tp j) and in consequence every path 7r(tvn) does not pass through j for any D Acirc D ~hcrefore a path 7r(in) = 7r(isv-)(iv rv)7r(rvn)
does not pass through j Similarly one can prove that a path ~ ( 1 j ) = i ~ ( l s ~ ) ( s ~ t t ) 7 r ( t t j ) for x acirc P(jAtildeˆPf(i does not pass through i Hence (i j ) E C(D) for any D C D- rn
The algorithm constructs D E D such that D con- tains dummy arc (i j ) iff (i j ) e RRi Dummy arcs ( i j )
for (i j ) f i are not included in D because [hey are redundant
The last two lemmas use the definition of the corn- plexity graph to show that i j ) Acirc C(D ) implies that (i j ) C(D) for any D Acirc D thus proving the theorem by showing that C[D ) has the minimum cardinality node cover
Lemma A2 If 7r(i j ) and 7r- ( i n) are two paths in D such that x (i j ) fl IT (i n) = i then in any equivalent network D Acirc Igt there exist paths r(i j ) and ~ ( i n) such that di j ) n ~ ( i n ) = i
Proof Sketch If TI-( j ) and ~i-(in) consists only of dummy arcs the result follows directly from Lemma A1 and the transitivity of CW When activity arcs are interspersed we use an induction argument based on re- peated applications of Umma A 1 IQ construcE ~ ( i j ) and 7r ( f w) The key observation is the following Sup- pose that we have found i ~ ( i j ) and ~ ( i Atildesect that intersect somewhere other than at i say at I We can then always find a dummy arc (a b) that precedes x on one of the paths Various cases need to be considered but in each the fact that (a b) acirc CD) is used to find alternate paths around x An indiictioit argument is needed because the alternate paths may have a later intersection A complete proof that considers aU of the possible cases was given by Michael 1141
Lcnuna A3 If v ( i j) and ~ t j ) are two paths in D such that 7 r V ( i j ) n ir (1 J) = j then in any equiv- alent network D Acirc D there exist paths irij) and no j ) such that v(i j ) fl ~ ( 1 j ) = j
Proof Symmetric to that of Lemma A2
REFERENCES
[11 VG Adiakha and VG Kuikami A classified bibliogra- phy of research on stochastic PERT networks 1966-1987 INFOR 27 (19891 272-296
123 AV Aho JE Hopcroft and J D Ullman The design and analysis of computer algorithms Addison-Wesley Read- ing MA i974
[31 WW Bein J Kamburowski and M F M Stallmann Op- tima reduction of two-terminal directed acyclic graphs SIAM J Comput 2 1 (19921 1 1 12-1 129
141 D Coppersmith and S Winograd Matrix multiplication via arithmetic progression J Symb Comput 9 (1990) 25 1- 280-
l5J B DeReyck and W Herrdclen On the use of the complex- iiy index as a measure of complexity in activity networks Eur J Oper Res 91 (1996) 347-366
161 3 Dodin Bounding the project completion time distribu- iion in PERT networks Oper Res 33 (19851 862-881
[7] SE Eirnaghraby The estimation of some network pa- rameters in the PERT model of activity networks Review and critique Advances in Project Scheduling R Slowin- ski and J Weglar7 (Editors) Elsevier Amsterdam 1989 pp 37 1432
[$I SE Elmaghraby Resource allocation via dynamic pro- gramming in activity networks Eur J Oper Res 64 (1993) 199L-215
191 LR Ford Jr and DR Fulkerson Flows in networks Princeton University Press Princeton NJ 1962
El01 MB Garman More on conditional sampling in the sirnu- lation of stochastic networks Mgmt Sci 19 (1972) 90-95
1 I 11 P Kall and SW Wallace Stochastic programming Wiley New York 1994
(121 J Kamburowski Bounding the distribution of project du- ration in PERT networks O p r Res Lett 12 (1 992) 17-22
1131 MS Krishnamoortliy and N Deo Complexity of the minimum-dummy-activities problem in a PERT network Networks 9 ( 19791 189- 194
1141 D1- Michael Optimal representations of activity networks as directed acyclic graphs PhD Thesis Program in Oper- ations Research North Carolina Slate University Raleigh NC 1991
11 51 DJ Michael J Kamburowski and MFM Stallmann On the minimum dummy arc-problem RAIRO Oper Res 2 0993) 153-168
[ I 61 M Mrozek Transitive y reduced and transitively closed event networks Networks 16 (19S9) 331-348
[I71 MM Sysio A graph-theoretic approach EO the jump- number problem Graphs and order I Rival (Editor) Rei- deS Dordrecht 1984 pp 1 85-2 1 5
[ I81 SW Wallace Bounding the expected time-cost curve for a stochastic PERT network from beamp Oper Res Lett 8 ( 1 9891 89-94

Lemma A2 If 7r(i j ) and 7r- ( i n) are two paths in D such that x (i j ) fl IT (i n) = i then in any equivalent network D Acirc Igt there exist paths r(i j ) and ~ ( i n) such that di j ) n ~ ( i n ) = i
Proof Sketch If TI-( j ) and ~i-(in) consists only of dummy arcs the result follows directly from Lemma A1 and the transitivity of CW When activity arcs are interspersed we use an induction argument based on re- peated applications of Umma A 1 IQ construcE ~ ( i j ) and 7r ( f w) The key observation is the following Sup- pose that we have found i ~ ( i j ) and ~ ( i Atildesect that intersect somewhere other than at i say at I We can then always find a dummy arc (a b) that precedes x on one of the paths Various cases need to be considered but in each the fact that (a b) acirc CD) is used to find alternate paths around x An indiictioit argument is needed because the alternate paths may have a later intersection A complete proof that considers aU of the possible cases was given by Michael 1141
Lcnuna A3 If v ( i j) and ~ t j ) are two paths in D such that 7 r V ( i j ) n ir (1 J) = j then in any equiv- alent network D Acirc D there exist paths irij) and no j ) such that v(i j ) fl ~ ( 1 j ) = j
Proof Symmetric to that of Lemma A2
REFERENCES
[11 VG Adiakha and VG Kuikami A classified bibliogra- phy of research on stochastic PERT networks 1966-1987 INFOR 27 (19891 272-296
123 AV Aho JE Hopcroft and J D Ullman The design and analysis of computer algorithms Addison-Wesley Read- ing MA i974
[31 WW Bein J Kamburowski and M F M Stallmann Op- tima reduction of two-terminal directed acyclic graphs SIAM J Comput 2 1 (19921 1 1 12-1 129
141 D Coppersmith and S Winograd Matrix multiplication via arithmetic progression J Symb Comput 9 (1990) 25 1- 280-
l5J B DeReyck and W Herrdclen On the use of the complex- iiy index as a measure of complexity in activity networks Eur J Oper Res 91 (1996) 347-366
161 3 Dodin Bounding the project completion time distribu- iion in PERT networks Oper Res 33 (19851 862-881
[7] SE Eirnaghraby The estimation of some network pa- rameters in the PERT model of activity networks Review and critique Advances in Project Scheduling R Slowin- ski and J Weglar7 (Editors) Elsevier Amsterdam 1989 pp 37 1432
[$I SE Elmaghraby Resource allocation via dynamic pro- gramming in activity networks Eur J Oper Res 64 (1993) 199L-215
191 LR Ford Jr and DR Fulkerson Flows in networks Princeton University Press Princeton NJ 1962
El01 MB Garman More on conditional sampling in the sirnu- lation of stochastic networks Mgmt Sci 19 (1972) 90-95
1 I 11 P Kall and SW Wallace Stochastic programming Wiley New York 1994
(121 J Kamburowski Bounding the distribution of project du- ration in PERT networks O p r Res Lett 12 (1 992) 17-22
1131 MS Krishnamoortliy and N Deo Complexity of the minimum-dummy-activities problem in a PERT network Networks 9 ( 19791 189- 194
1141 D1- Michael Optimal representations of activity networks as directed acyclic graphs PhD Thesis Program in Oper- ations Research North Carolina Slate University Raleigh NC 1991
11 51 DJ Michael J Kamburowski and MFM Stallmann On the minimum dummy arc-problem RAIRO Oper Res 2 0993) 153-168
[ I 61 M Mrozek Transitive y reduced and transitively closed event networks Networks 16 (19S9) 331-348
[I71 MM Sysio A graph-theoretic approach EO the jump- number problem Graphs and order I Rival (Editor) Rei- deS Dordrecht 1984 pp 1 85-2 1 5
[ I81 SW Wallace Bounding the expected time-cost curve for a stochastic PERT network from beamp Oper Res Lett 8 ( 1 9891 89-94