Embed Size (px)
Citation preview

MIMO CONTROL FOR AUTOMOTIVECOLDSTART
Pannag R. Sanketi ∗,1 J.Carlos Zavala ∗
M.Wilcutts ∗ T.Kaga ∗∗ J. K. Hedrick ∗
∗Vehicle Dynamics and Control Laboratory, EtcheverryHall, University of California, Berkeley, USA- 94720∗∗ Toyota Technical Center U.S.A., Inc. Berkeley
Laboratory, Tech. Research Dept.
Abstract: The problem of controlling combustion engine emissions during thecoldstart period is addressed by designing a MIMO sliding mode controller. Thetask of the controller is to track a given set of desired profiles of engine-outhydrocarbon emissions and catalyst temperature using spark timing and fuelinjection rate as the inputs. This is an important step in solving the coldstartproblem. The throttle is not used as a control input. Different profiles of desiredengine-out hydrocarbons and catalyst temperatures are used to analyze thecoldstart problem. Simulation results indicate that the controller tracks the desiredprofiles as long as the inputs are not saturated. The controller presented here couldbe used as a tool to investigate the optimal input profiles. Experiments are beingcarried out to validate the simulations. Submitted to Fifth IFAC Symposium onAdvances in Automotive Control
Keywords: Coldstart, Model Based Control, MIMO Sliding control
1. INTRODUCTION
It is well known that during the coldstart periodof a combustion engine, a large percentage oftotal cumulative hydrocarbon emissions are pro-duced. Previous approaches to the problem canbe broadly classified into two categories. One ofthem consists of changing the physical capabilitiesof the subsystems to reduce the emissions. For in-stance in (Nishizawa et al. 2000), new technologiesare presented to achieve the SULEV (Super UltraLow Emissions Vehicle) standards for an automo-tive engine: high velocity air and high swirl com-bustion, super low-heat mass substrate catalyst,two-stage high efficiency HC trap catalyst systemand triple sensor highly accurate air-fuel ratiocontrol system. In (Tanaka et al. 2001), a catalyst
that reacts to the environment is presented. Thesecond category considers the features of the plantas fixed and seeks strategies in which the controlsystem can improve the emissions reduction per-formance of the engine. For instance, in (Fischerand Brereton 1997), the different strategies inves-tigated to minimize HC emissions consist of find-ing optimal settings in the fuel injection pattern(single versus dual fuel injection pulse), the useof air-assisted fuel injection, and changes in thefuel injection mode (open intake valve injectionversus closed intake valve injection). In (Arsie etal. 1998), models are developed to reduce theuncertainty in the prediction of emissions andimprove the controller performance. Other effortsfocus in reducing emissions by improving bothaspects of the engine performance: changes inhardware and changes in control algorithms. In(Kaiser et al. 1998) and (Alkidas and Drews 1996),

hydrocarbon emissions are compared with differ-ent setups for fuel preparation.
Coldstart controllers with various control inputshave been developed, though exhaust gas temper-ature, ignition timing and air-fuel ratio (AFR)continue to be used the most. Many of thesetry to optimize the trade-off between reducingthe raw emissions and achieving a faster cata-lyst light-off. Refer to the following for relatedinformation (Aquino 1981),(Sun and Sivashankar1998), (Souder and Hedrick 2004), (Tseng andCheng 1999), (Shaw and Hedrick 2003) (Sanketiet al. 2005), (Baotic et al. 2003). (Tunestal etal. 1999) and (Lee et al. 2001) have used in-cylinder pressure measurement for control andestimation purposes. Hybrid automata have alsobeen used in modeling and control, for example in(Sanketi et al. 2006) and (Giorgetti et al. 2005).
In this paper, it is assumed that the physicalfeatures of the engine components are fixed. Wefocus in designing controllers that track engine-out hydrocarbon emissions (HCraw) and catalysttemperature (Tcat). The models for HCraw, ex-haust temperature (Texh) and Tcat are presentedin another paper submitted to this symposium.
The controller has a three-tier architecture: (i)Topmost is a Tcat dynamic surface controller thatuses Texh as the control input. (ii) At next levelis a MIMO (2 output, 2 input) sliding modecontroller that achieves desired profiles of Texh
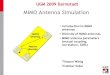
and HCraw using AFR and spark timing (∆)as inputs. (iii) finally an AFR dynamic surfacecontroller that uses the fuel injection rate (mfc)as the control input. See Fig. 1. First, differ-ent profiles of desired catalyst temperature andengine-out HC emissions based upon typical cold-start experimental data are tracked. Furthermore,the total tailpipe HC emissions in different casesand the feasibility of the control inputs are usedas parameters to investigate the minimization ofcoldstart emissions.
2. CONTROLLER
2.1 Control Algorithm
The main idea in the control algorithm presentedhere is the combined use of the catalyst andthe engine models. The inputs to the engine toreduce tailpipe emissions are determined usingdynamic surface and MIMO sliding controllers.MIMO Sliding mode control laws are developedfor Texh and engine exhaust hydrocarbons HCraw.Control laws are also developed for Tcat and theAFR. The control architecture is shown in theFigure 1.
Fig. 1. The controller architecture
Overall strategy is driven by the Texh and HCraw
models. Each of these, as described in (?), dependson both ∆ and AFR. Together, these form agood platform for a MIMO control design. Tostart with, profiles of Tcat and HCraw as givenby typical coldstart experimental data are chosenas the desired profiles to be tracked. From thecatalyst model, we know that Tcat depends mainlyon Texh. So we use the principle of dynamicsurface controller, where Texh is set such that thedesired Tcat is achieved. Next in the hierarchy is aMIMO (2 inputs and 2 outputs) controller whichuses the spark timing and the AFR to controlthe raw HC and Texh. Then, the desired AFR isobtained through dynamic surface controller byusing fuel injection rate as the input.
2.2 Catalyst Temperature Control
Catalyst temperature is mainly dependent onTexh. Using dynamic surface control, we controlTcat treating Texh as a synthetic input. We definea sliding surface equal to the difference betweenthe actual and desired value of Tcat.
S1 = Tcat − Tcat,d (1)
S1 = Tcat − Tcat,d
Substitute for the dynamics of Tcat from (?). Weget,
S1 =Qgen + Qin − Qout − Qevap
mCv + MC− Tcat,d
Treating Texh as the input, design the control lawto obtain
S1 = −λ1S1
where λ1 is a positive gain. This leads to
Texh =(Tcat,d − λ1S1)(mCv + MC)
mexhCp+ (2)
−Qgen + Qout + Qevap + mexhCpTtp
mexhCp

where Texh is the synthetic input. To track thedesired value of the synthetic input, we need tofind its derivative, which can lead to too manyterms called the ”explosion of terms” problem.Also, the term Texh may include uncertaintieswhich can lead to problems on differentiation.Hence, the desired value of Texh to be trackedis found by passing the synthetic input througha low-pass filter so that explosion of terms andtaking unknown derivatives is avoided. That is thebasic principle of dynamic surface control.
τT Texh,d + Texh,d = Texh (3)
Then, we use a MIMO sliding control designto achieve the desired profiles of exhaust gastemperature and raw HC using spark timing ∆and AFR as inputs.
2.3 MIMO control
We define a vector of sliding surfaces as follows:
S =[
s1
s2
]=
[Texh − Texh,d
HCraw −HCraw,d
](4)
The Texh,d profile is obtained from the Tcat,d asdescribed in the previous subsection. Differentiat-ing, and using the dynamics of Texh and HCraw,we set AFR and ∆ to obtain
S =[
s1
s2
]= −KS (5)
where, K ∈ R2x2, the gain on the MIMO control,is strictly a positive definite matrix. This will yieldthe desired profiles of AFR and ∆.
The outputs HCraw and Texh are coupled. Theseare two competing objectives playing an impor-tant role in the reduction of tailpipe emissions.It is important to choose a non-diagonal gain sothat the coupling between the two outputs is notoverlooked. If a diagonal matrix is chosen, it willbe equivalent to two SISO sliding controllers.
2.4 AFR Control
To track the desired AFR, instead of defininga sliding surface on the AFR signal, it is moreconvenient to define a sliding surface on the fuelflow rate, as follows
S2 = mfo − mfo,d (6)
withmfo,d =
mao
AFRd(7)
where AFRd is the desired AFR and mao is themanifold out air flow rate. The commanded fuelflow is used as the input to obtain
S2 = −λ2S2
where λ1 is a positive gain. Using (6) and (8)together with the description of the fuel dynamicsas given in (Sanketi et al. 2006), we get,
εmfc +1τf
mfc − 1τf
mfo − mfo,d = −λ2S2 (8)
and expanding the term mfo,d gives the equationfor the control input
mfc +1
ετfmfc =
1ετf
mfo +1ε(
mao
AFRd+ (9)
mao
AFR2d
˙ARFd)− λ2S2
As in the case of Tcat control, AFRd is obtained bypassing the synthetic input ¯AFR through a low-pass filter so that explosion of terms and takingunknown derivatives is avoided.
τAFR˙AFRd + AFRd = ¯AFRd (10)
2.5 Notes on the controller
A nominal throttle profile during the coldstart istreated as an exogenous input to the system. Also,for the case of our analysis, the control input spacewas considered constant, whereas in practice it isdependent on the operating point.
The main sensors required for the controller im-plementation are the HC analyzer, a linear AFRsensor, exhaust and catalyst temperature sensors.Although, all the results presented in Section 3are simulations, the inputs to the controller arebased on experimental data.
Also, it is assumed that a full state feedback isavailable. Given HC and Texh sensors, it is easy toimplement the observers for the states. Currently,the possibility of estimating HC, AFR and Texh
using in-cylinder pressure measurements is beinginvestigated.
Regarding the desired profiles, it should be notedthat it is not verified if the profiles of HCraw,d andTcat,d used in this paper are the optimal ones forcoldtart purposes. However, they provide a basisfor analysis of optimality.
3. RESULTS AND DISCUSSION
Various sets of desired profiles of catalyst temper-ature (Tcat,d) and raw HC (HCraw,d) are proposedto be tracked by the controller. The desired pro-files cannot be chosen arbitrarily since there arephysical constraints on the system. For example,Tcat will always have a plateau, because of theevaporation effect inside the catalyst. Similarly,the initial peak in the HCraw cannot be com-pletely wiped out because that will risk stalling

0 10 20 30 40 50 60 70 80 900
2000
4000
6000
8000
10000
12000 H
C [p
pm]
HC rawHC raw desired
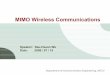
Fig. 2. HCraw profiles (model and desired)- Run1
0 10 20 30 40 50 60 70 80 900
200
400
600
800
Tca
t [C
]
0 10 20 30 40 50 60 70 80 900
200
400
600
Time [s]
Tex
h [C
]
TcatTcat Desired
TexhTexh Desired
case 4
case 1
case 4
case 1
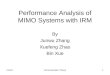
Fig. 3. Tcat and Texh profiles (model and desired)-Run 1
the engine. Initially, those profiles were taken fromexperimental results of a typical coldstart run.The profiles were then modified to achieve a widerset of desired values. In this section, all the figurescontain plots of a set of cases, which are groupedinto runs. Where the plots show a single line, itmeans all the cases of the same run resulted in thesame curve for that variable.
Figures 2 and 3 show the first set of desiredprofiles, HCraw,d and Tcat,d. HCraw,d desired wastaken from a typical HCraw coldstart profile. Thecorresponding Tcat,d profile was offset by con-stants between -40C and 100C to obtain differ-ent Tcat,d profiles. It should be noted that sincethe throttle position was treated as an exoge-nous input, the range of viable Tcat profiles wassuch that some of the Tcat,d profiles could not betracked. Note in Fig. 4 that the required mfc waspractically the same for different Tcat,d, howeverdifferent profiles of ∆spark were generated by thecontroller. The inputs show the expected trends.Different lightoff times (Fig. 6) meant differentcumulative HC levels, as seen in Fig. 5.
Simulations were also performed using differentHCraw,d profiles. In this case, the profiles were
10 20 30 40 50 60 70 80
0
5
10
x 10−4
dmfc
[k/s
]
10 20 30 40 50 60 70 80
−30
−20
−10
0
10
Del
ta [d
eg A
TD
C]
Time [s]
case 1case 2case 3case 4
Fig. 4. Fuel injection rate and Spark timing -Run 1
0 10 20 30 40 50 60 70 80 900
0.1
0.2
0.3
0.4
HC
cum
[g]
0 10 20 30 40 50 60 70 80
11
12
13
14
15
16
AF
R
Time [s]
case 1case 2case 3case 4
case 1case 2case 3case 4
Fig. 5. Cumulative tailpipe HC and AFR- Run 1
10 20 30 40 50 60 70 800
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time [s]
Eta
HC
case 1case 2case 3case 4
Fig. 6. Catalyst conversion efficiency- Run 1
obtained by multiplying a typical actual HCraw
coldstart profile by constants between 0.3 and 2.0.Fig. 8 shows HCraw,d together with the values ofHCraw given by the model. One of the desiredprofiles could not be tracked. The reason can beexplained by the AFR profile in Fig. 11. Thecorresponding AFRd reached the value of 16,which is the saturation level of AFR that we haveused for the simulations.

0 10 20 30 40 50 60 70 80 902
4
6
8
10
Thr
ottle
A. [
deg]
0 10 20 30 40 50 60 70 80 900
500
1000
1500
2000
2500
Spe
ed [r
pm]
Time [s]
Fig. 7. Throttle angle and engine RPM- Run 1
0 10 20 30 40 50 60 70 80 900
0.5
1
1.5
2
2.5x 10
4
HC
[ppm
]
case 1
case 4
HC rawHC raw desired
Fig. 8. HCraw profiles (model and desired)- Run2
0 10 20 30 40 50 60 70 80 900
200
400
600
Tca
t [C
]
case 1
case 4
case 4
0 10 20 30 40 50 60 70 80 900
200
400
600
Time [s]
Tex
h [C
]
case 1
case 4
TcatTcat Desired
TexhTexh Desired
Fig. 9. Tcat and Texh profiles (model and desired)-Run 2
Note in Fig. 11 the different levels of cumulativeHCraw reached by different simulations. Three ofthem are almost constant after 30s, however oneof them still increases till about 60s. The catalystefficiency shown in Fig. 12 explains this behavior, where one of the curves of efficiency drops below50% between 30s and 60s. Further, a combinationof different profiles of Tcat,d and HCraw,d wassimulated. The results for Tcat and HCraw areshown in Fig. 13. The fuel injection rate, spark
0 10 20 30 40 50 60 70 80 900
0.5
1
1.5x 10
−3
dmfc
[kg/
s]
0 10 20 30 40 50 60 70 80−30
−20
−10
0
10
Del
ta [d
eg A
TD
C]
Time [s]
case 1case 2case 3case 4
case 1case 2case 3case 4
Fig. 10. Fuel injection rate and Spark timing -Run 2
0 10 20 30 40 50 60 70 80 900
0.5
1
1.5
HC
cum
[g]
0 10 20 30 40 50 60 70 8010
12
14
16
AF
R
Time [s]
case 1case 2case 3case 4
case 1case 2case 3case 4
Fig. 11. Cumulative tailpipe HC and AFR- Run 2
10 20 30 40 50 60 70 80 90
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time [s]
Eta
HC
case 1case 2case 3case 4
Fig. 12. Catalyst conversion efficiency- Run 2
timing, cumulative tailpipe HC and AFR areshown in Figures 14 and 15. Observe that theHCraw,d profiles can be tracked well, however oneof the Tcat profiles cannot be tracked properly.This is due to the nature of the desired profiles andthe value of the exogenous input. A higher HCraw
needs the AFR to be maintained rich and aretarded spark. Under such a scenario, Tcat cannotbe maintained as low as you want. This basicallyillustrates the trade-off during coldstart. Also note

0 10 20 30 40 50 60 70 80
0
200
400
600T
cat [
C]
case 1
case 3
10 20 30 40 50 60 70 80 90
0
5000
10000
15000
HC
[ppm
]
case 1
case 3
TcatTcat Desired
HC rawHC raw desired
Fig. 13. Catalyst temperature and HC emissions(model and desired)- Run 3
10 20 30 40 50 60 70 80
0
5
10
x 10−4
dmfc
[kg/
s]
10 20 30 40 50 60 70 80
−30
−20
−10
0
10
Del
ta [d
eg A
TD
C]
Time [s]
case 1case 2case 3
case 1case 2case 3
Fig. 14. Fuel injection rate and Spark timing -Run 3
0 10 20 30 40 50 60 70 80 900
0.1
0.2
0.3
0.4
0.5
HC
cum
[g]
0 10 20 30 40 50 60 70 80 90
10
12
14
16
AF
R
Time [s]
case 1case 2case 3
case 1case 2case 3
Fig. 15. Cumulative tailpipe HC and AFR- Run 3
that even though the catalyst conversion efficiencyηc (shown in Fig. 16) for case 1 reaches 1 at around30s, the total cumulative HC are less than for thatcase 3, where ηc reaches 1 in about 15s. The reasonis the difference in HCraw emissions level.
Simulations were also performed with differentthrottle angle profiles, as shown in Fig. 17. Theprofiles were obtained by multiplying three differ-ent factors (0.7, 1.0 and 1.3) to a typical cold-
0 10 20 30 40 50 60 70 80
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time [s]
Eta
HC
case 1case 2case 3
Fig. 16. Catalyst conversion efficiency- Run 3
0 10 20 30 40 50 60 70 80 902
4
6
8
10
12
Thr
ottle
A. [
deg]
0 10 20 30 40 50 60 70 80 900
1000
2000
3000
4000
Spe
ed [r
pm]
Time [s]
case 1case 2case 3
case 1case 2case 3
Fig. 17. Throttle angle profiles and engine speeds- Run 4
start throttle angle profile given by the ECU. Thedesired Tcat was chosen to be the same for thedifferent throttle angles. As seen in Figures 18and See Fig. 20, the system could not track thedesired profile for one of the cases, viz. case 1. Atlow engine speed, the engine pressure is low dueto which the combustion quality is low. Hence,HCraw cannot be maintained as low as desiredand Tcat cannot be increased as fast as desired.The low Tcat affects adversely ηc, as seen in Fig.19.
In another set of experiments (Run 5), differentconstant profiles for the accessory torque wereused as disturbances during the system simula-tions. The values of the accessory torque werebetween 10 and 70 N-m The throttle and enginespeeds are shown in Fig. 21. The desired Tcat andTexh were the same for all different cases of thesimulation. However in one of them the desiredprofiles could not be achieved, mainly due to thelow values of crankshaft speed for that case. SeeFig. 22 The degradation in the HCtp emissionscan be observed in Fig. 23 and Fig. 24. The per-formance in case 3 is related to the low values ofηc. This case has the largest accessory torque (70N-m).

0 10 20 30 40 50 60 70 80 900
200
400
600
Tca
t [C
]
case 1
case 3
0 10 20 30 40 50 60 70 80 900
200
400
600
800
Time [s]
Tex
h [C
]
case 1
case 3
TcatTcat Desired
TexhTexh Desired
Fig. 18. Catalyst and exhaust temperature profiles(model and desired)- Run 4
10 20 30 40 50 60 70 80 90
0
0.1
0.2
0.3
HC
cum
[g]
10 20 30 40 50 60 70 80
0
0.2
0.4
0.6
0.8
1
Time [s]
Eta
HC
case 1case 2case 3
case 1case 2case 3
Fig. 19. Cumulative HC emissions and Catalystconversion efficiency- Run 4
0 10 20 30 40 50 60 70 80 900
2000
4000
6000
8000
10000
12000
HC
[ppm
]
case 1
case 3
HC rawHC raw desired
Fig. 20. HCraw,d and HCraw (model and desired)-Run 4
4. CONCLUSIONS
A coldstart controller with three components wasdesigned. The first component is a DSC (dynamicsurface control) controller which tracks a desiredTcat profile . The second is a MIMO (multi-ple input-multiple output) sliding mode controllerthat tracks HCraw and Texh. The third one is a
0 10 20 30 40 50 60 70 80 902
4
6
8
10
Thr
ottle
A. [
deg]
0 10 20 30 40 50 60 70 80 900
500
1000
1500
2000
2500
Spe
ed [r
pm]
Time [s]
case 1case 2case 3
case 1case 2case 3
Fig. 21. Throttle angle profiles and engine speeds- Run 5
0 10 20 30 40 50 60 70 80 900
200
400
600
Tca
t [C
]
case 1
case 3
0 10 20 30 40 50 60 70 80 900
200
400
600
Time [s]
Tex
h [C
]
case 1
case 3
TcatTcat Desired
TexhTexh Desired
Fig. 22. Catalyst and exhaust temperature profiles(model and desired)- Run 5
0 10 20 30 40 50 60 70 80 900
0.2
0.4
0.6
0.8
HC
cum
[g]
10 20 30 40 50 60 70 800
0.2
0.4
0.6
0.8
1
Time [s]
Eta
HC
case 1case 2case 3
case 1case 2case 3
Fig. 23. Cumulative HC emissions and Catalystconversion efficiency- Run 5
DSC AFR controller. Simulations are performedusing typical coldstart HCraw and Tcat profilesas initial tracking references for the controller.The desired HCraw and Tcat were modified fromtheir respective initial profiles and the changesin tailpipe emissions (HCtp) were analyzed. Thetradeoff of fast light-off vs. low HCtp was evi-dent when several combinations of desired HCraw

0 10 20 30 40 50 60 70 80 900
2000
4000
6000
8000
10000
12000 H
C [p
pm]
case 1
case 3
HC rawHC raw desired
Fig. 24. HCraw,d and HCraw (model and desired)-Run 5
profiles with desired Tcat were used. Simulationswith external disturbances in the throttle angleand accessory torque showed some degradationin the performance of the controller. In all thecases, changes in the desired HCraw seemed tohave a larger effect on tailpipe emissions than thechanges in the desired Tcat.
At this time, experiments are being carried out tovalidate the results of simulations. Also, methodsare being analyzed to approach the problem ofthe optimization of the system. The use of the ac-tual allowed ranges of control inputs represent anaspect of the optimization problem, too. In prac-tice, the control input space is dependent on theoperating point. For the case of our simulations,for ease of analysis, it was considered constant.The controller was designed based on the enginemodel presented in another paper submitted tothis symposium.
5. ACKNOWLEDGEMENTS
Authors acknowledge the financial support pro-vided by CONACYT (Consejo Nacional de Cien-cia y Tecnologıa de Mexico) and by the Cen-ter for Hybrid and Embedded Software Systems(CHESS) at UC Berkeley, which receives sup-port from the National Science Foundation (NSFaward #CCR-0225610), the State of CaliforniaMicro Program, and the following companies: Ag-ilent, Bosch, DGIST, General Motors, HewlettPackard, Infineon, Microsoft, National Instru-ments, and Toyota.
REFERENCES
Alkidas, A.C. and R.J. Drews (1996). Effects ofmixture preparation on hc emissions of as.i. engine operating under steady-state coldconditions. SAE Technical Paper 961958.
Aquino, C.F. (1981). Transient a/f control char-acteristics of the 5 liter central fuel injectionengine. SAE 810494.
Arsie, I., C. Pianese and G. Rizzo (1998). Mod-els for the prediction of performance andemissions in a spark ignition engine - a se-quentially structured approach. SAE Techni-cal Paper 980779.
Baotic, M., M. Vasak, M. Morari and NedjeljkoPeric (2003). Hybrid systems theory basedoptimal control of an electronic throttle. Pro-ceedings of the American Control Conferencepp. 5209–5214.
Fischer, H.C. and G.J. Brereton (1997). Fuelinjection strategies to minimize cold-start hcemissions. SAE Technical Paper 970040.
Giorgetti, N., A. Bemporad, I. Kolmanovsky andD. Hrovat (2005). Explicit hybrid optimalcontrol of direct injection stratified chargeengines.
Kaiser, E., W.O. Siegl, P. Lawson, F.T. Conolly,C.F. Cramer, K.L. Dobbins, P.W. Roth andM. Smokovitz (1998). Effect of fuel prepa-ration on cold-start hydrocarbon emissionsfrom a spark-ignite engine. SAE TechnicalPaper 961957.
Lee, A.T., M. Wilcutts, P. Tunestal andJ.K.Hedrick (2001). A method of lean air-fuelratio control using combustion pressure mea-surement. Society of Automotive Engineers ofJapan, Inc. and Elsevier Science pp. 389–393.
Nishizawa, K., S. Momoshima and M. Koga(2000). Nissan’s gasoline sulev technology.SAE Technical Paper 2000-01-1583.
Sanketi, P.R., J. Carlos Zavala and J. K. Hedrick(2005). Dynamic surface control of engine ex-haust hydrocarbons and catalyst temperaturefor reduced coldstart emissions. In: Proc. ofInternational Federation of Automatic Con-trol (IFAC) Conference. Prague, Czech Rep.
Sanketi, P.R., J.C. Zavala and J.K. Hedrick(2006). Automotive engine hybrid modelingand control for reduction of hydrocarbonemissions. International Journal of Control79(5), 449–464.
Shaw, B. and J. K. Hedrick (2003). Closed-loopengine coldstart control to reduce hydrocar-bon emissions. Proceedings of the AmericanControl Conference pp. 1392–1397.
Souder, J. and J. K. Hedrick (2004). Adap-tive sliding mode control of air-fuel ratioin internal combustion engines. InternationalJournal of Robust and Nonlinear Control14(6), 525–541.
Sun, J. and N. Sivashankar (1998). Issues incold start emission control for automotive icengines. Proceedings of the American ControlConference pp. 1372–1376.

Tanaka, H., M. Uenishi and I. Tan (2001). An in-telligent catalyst. SAE Technical Paper 2001-01-1301.
Tseng, T.C. and W.K. Cheng (1999). An adaptiveair/fuel ratio controller for si engine throttletransients. SAE 1999-01-0552.
Tunestal, P., M. Wilcutts, A.T. Lee and J.K.Hedrick (1999). In-cylinder measurement forengine cold-start control. Proceedings of the1999 IEEE International Conference on Con-trol Applications pp. 460–464.
















![Mimo [new]](https://img.pdfslide.us/doc/110x75/58712c5f1a28abe4448b7621/mimo-new.jpg)








