Embed Size (px)
DESCRIPTION
Microsoft Indoor Localization Competition. 36 submissions from 32 teams 21 teams with 22 systems eventually participated Academia, Industry, Startups Submissions were classified into two categories Infrastructure-free (9 teams) No hardware deployment - PowerPoint PPT Presentation
Citation preview
Microsoft Indoor Localization Competition• 36 submissions from 32 teams• 21 teams with 22 systems eventually participated• Academia, Industry, Startups
• Submissions were classified into two categories• Infrastructure-free (9 teams)
• No hardware deployment• WiFi and sensors (accelerometer, gyro, etc.)
• Infrastructure-based (13 teams)• Custom hardware deployment (magnetic, custom RF, light-based, etc.)
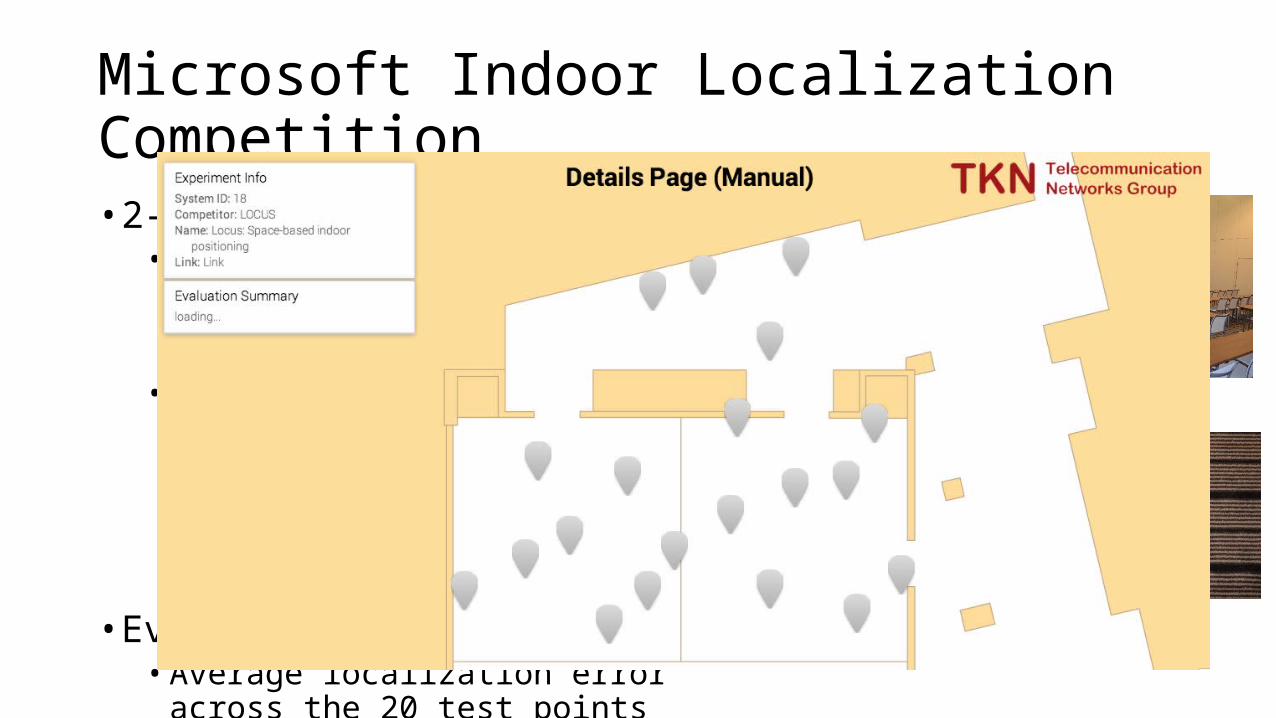
Microsoft Indoor Localization Competition• 2-day event• Day 1: Sunday
• Teams were given 7 hours to setup and calibrate their systems
• Day 2: Monday• Each team was asked to provide the
coordinates of 20 test points • Test points’ coordinates were manually
measured using laser range finders
• Evaluation Metric• Average localization error across the 20
test points

Microsoft Indoor Localization Competition
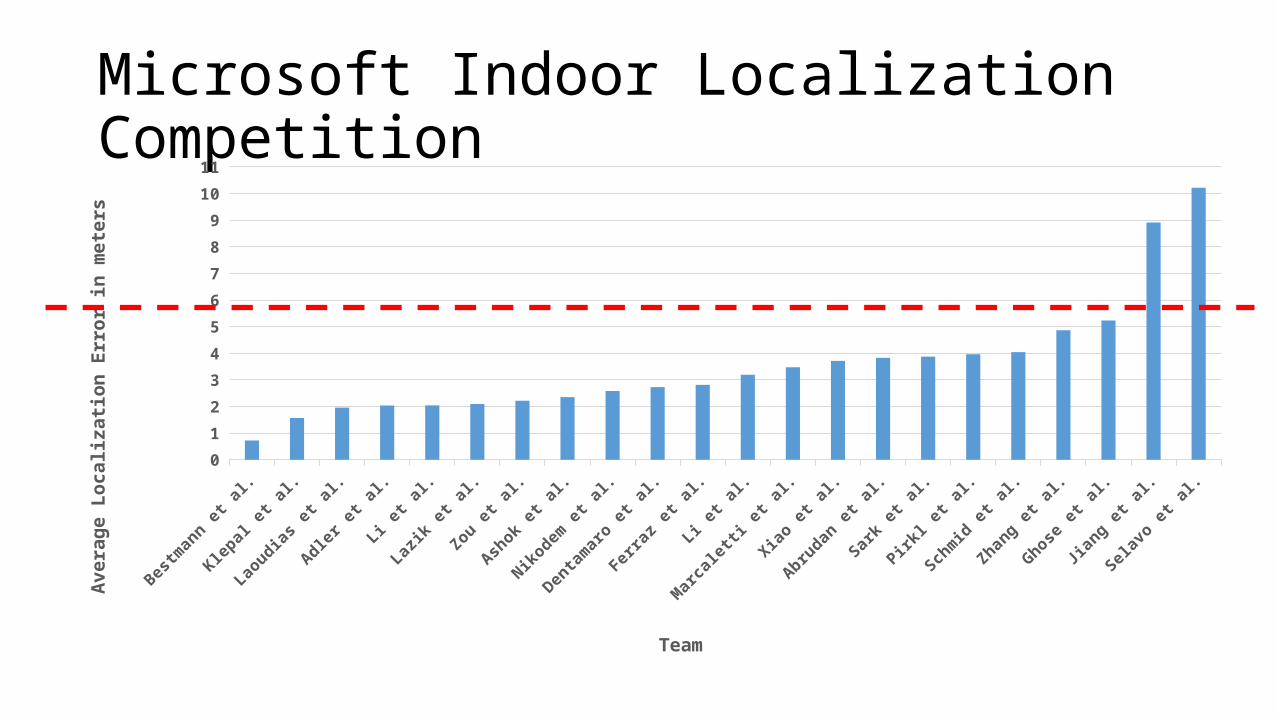
Bestmann et a
l.
Klepal et a
l.
Laoudias e
t al.
Adler et a
l.
Li et a
l.
Lazik
et al.
Zou et al.
Ashok et a
l.
Nikodem et al.
Dentamaro et a
l.
Ferra
z et a
l.
Li et a
l.
Marcaletti et a
l.
Xiao et al.
Abrudan et a
l.
Sark et al.
Pirkl e
t al.
Schmid et a
l.
Zhang et al.
Ghose et al.
Jiang et a
l.
Selavo et al.
0
1
2
3
4
5
6
7
8
9
10
11
Team
Aver
age
Loca
lizati
on E
rror
in m
eter
s
1st
2nd
3rd
4th
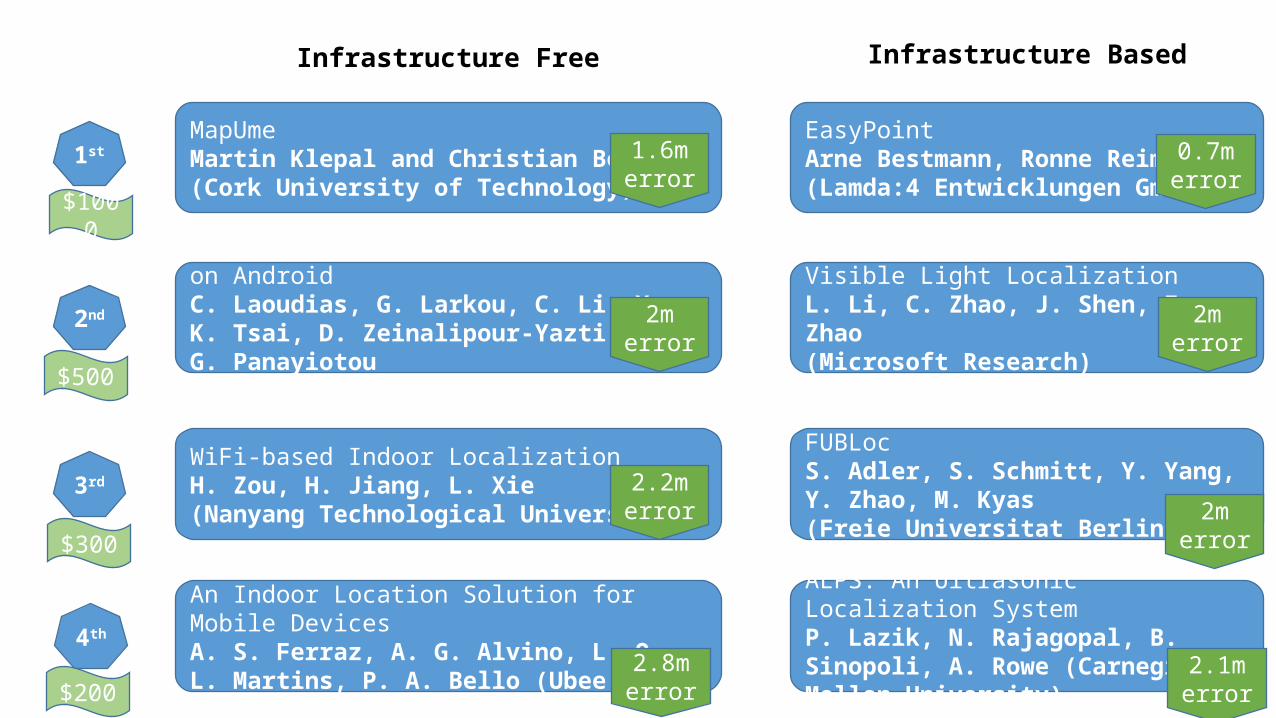
Infrastructure Free Infrastructure Based
$1000
$500
$300
$200
MapUmeMartin Klepal and Christian Beder(Cork University of Technology)
1.6m error
EasyPoint Arne Bestmann, Ronne Reimann(Lamda:4 Entwicklungen GmbH)
0.7m error
Accurate Multi-Sensor Localization on AndroidC. Laoudias, G. Larkou, C. Li, Y.-K. Tsai, D. Zeinalipour-Yazti, C. G. Panayiotou (University of Cyprus)
2m error
WiFi-based Indoor LocalizationH. Zou, H. Jiang, L. Xie (Nanyang Technological University)
2.2m error
An Indoor Location Solution for Mobile DevicesA. S. Ferraz, A. G. Alvino, L. Q. L. Martins, P. A. Bello (Ubee S.A.) 2.8m
error
Visible Light LocalizationL. Li, C. Zhao, J. Shen, F. Zhao(Microsoft Research)
2m error
FUBLocS. Adler, S. Schmitt, Y. Yang, Y. Zhao, M. Kyas(Freie Universitat Berlin) 2m
error
ALPS: An Ultrasonic Localization SystemP. Lazik, N. Rajagopal, B. Sinopoli, A. Rowe (Carnegie Mellon University) 2.1m
error
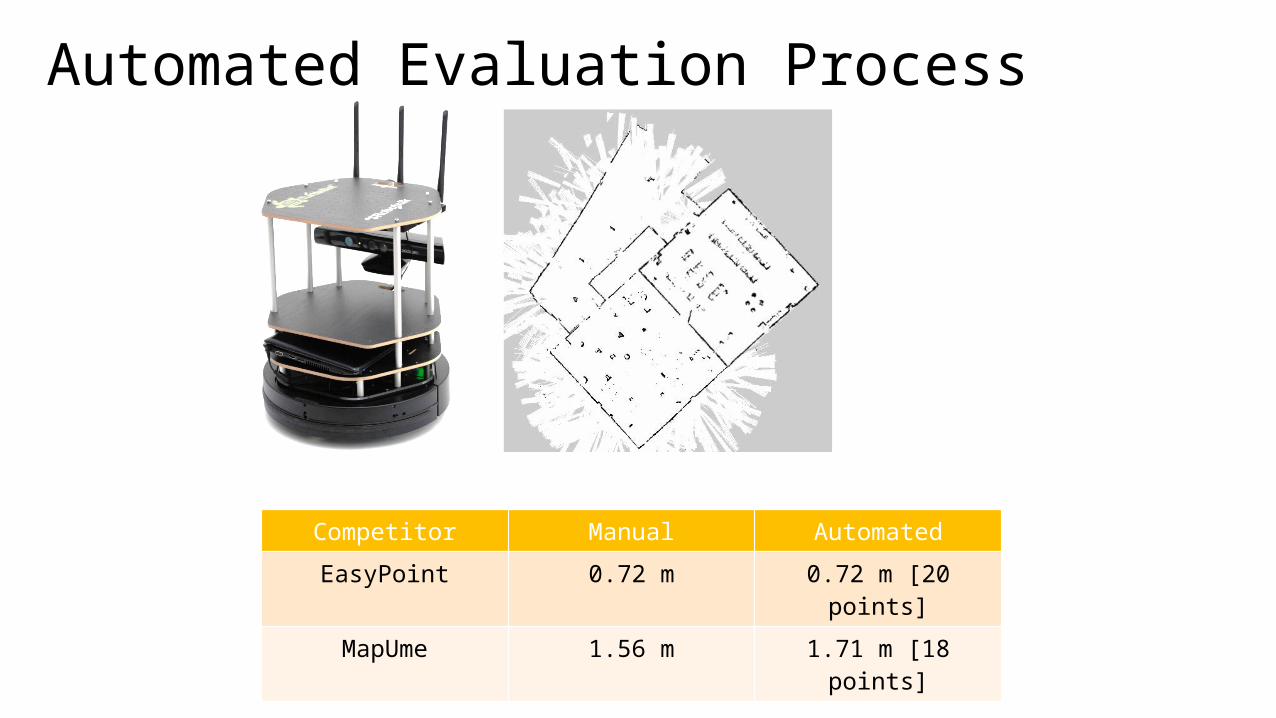
Automated Evaluation Process
Competitor Manual Automated
EasyPoint 0.72 m 0.72 m [20 points]
MapUme 1.56 m 1.71 m [18 points]
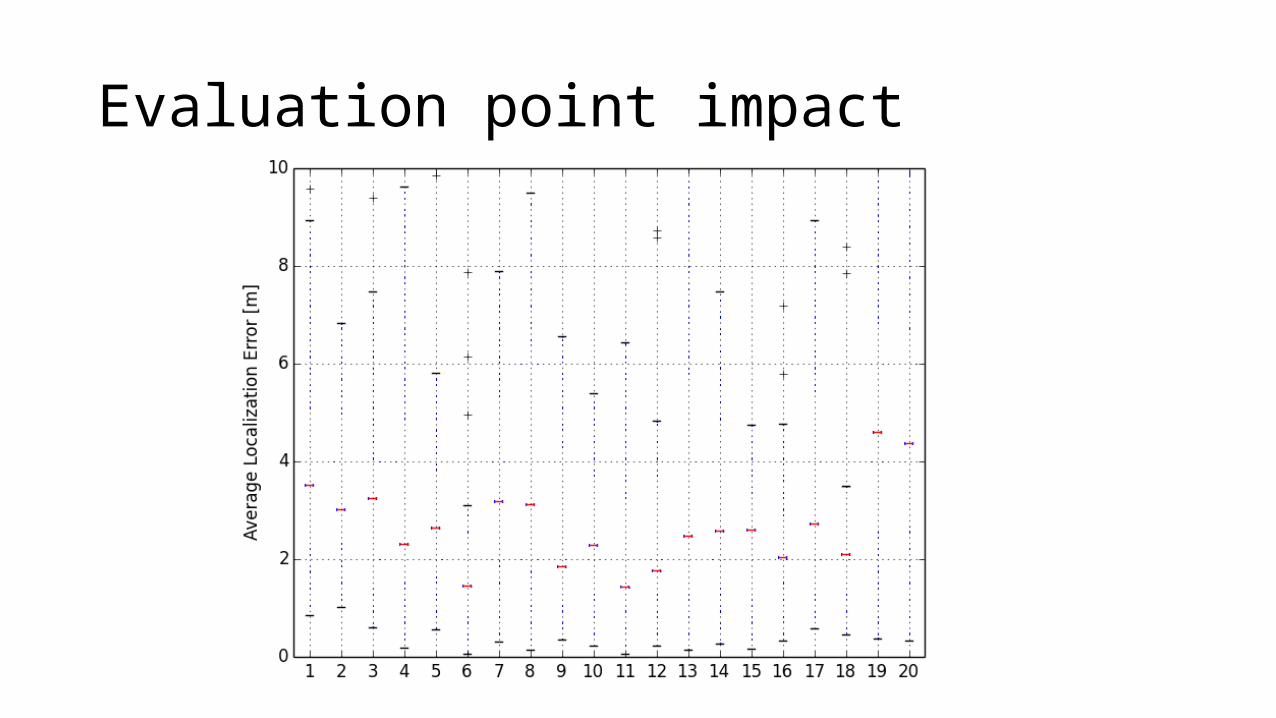
Evaluation point impact
Point 1 Point 2 Point 3 Point 4 Point 5 Point 6 Point 7 Point 8 Point 9 Point 10 Point 11 Point 12 Point 13 Point 14 Point 15 Point 16 Point 17 Point 18 Point 19 Point 200
1
2
3
4
5
6
7
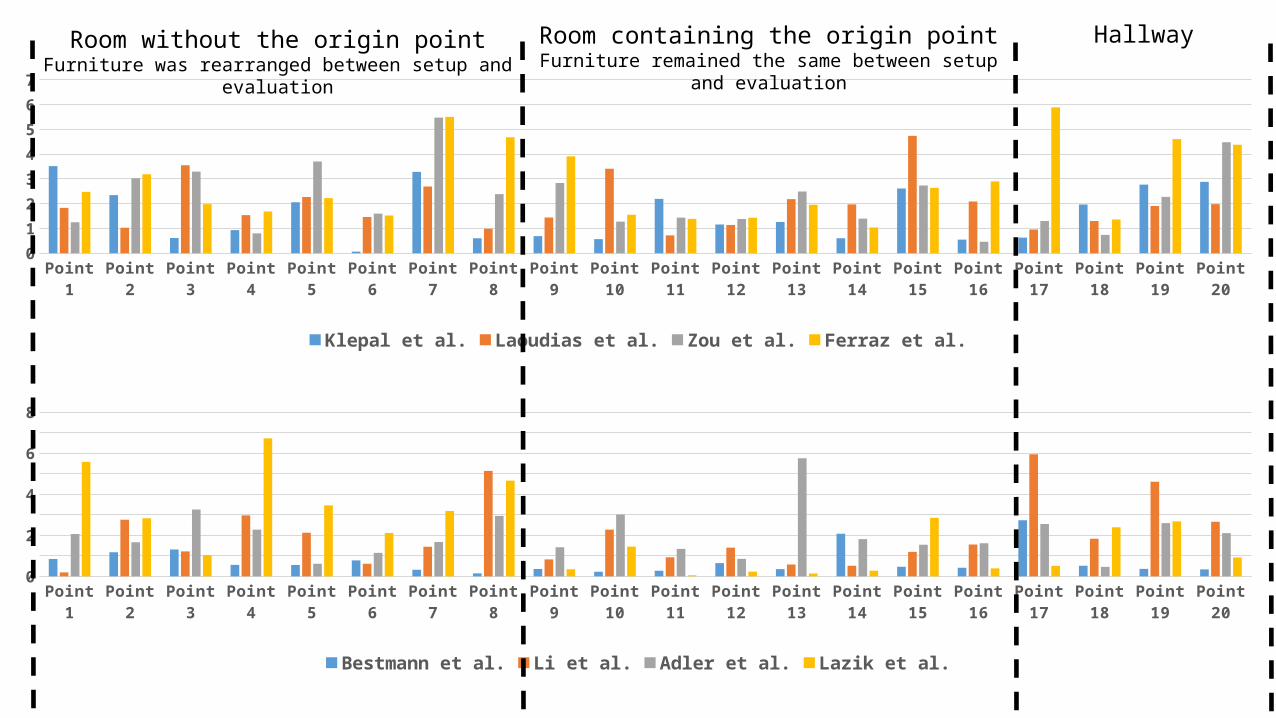
Klepal et al. Laoudias et al. Zou et al. Ferraz et al.
Point 1 Point 2 Point 3 Point 4 Point 5 Point 6 Point 7 Point 8 Point 9 Point 10 Point 11 Point 12 Point 13 Point 14 Point 15 Point 16 Point 17 Point 18 Point 19 Point 20012
345678
Bestmann et al. Li et al. Adler et al. Lazik et al.
Room without the origin pointFurniture was rearranged between setup and evaluation
Room containing the origin pointFurniture remained the same between setup and evaluation
Hallway

A huge THANKS to
Jie Liu
Vlado Handziski
Filip Lemic Jasper Buesch



























