Embed Size (px)
Citation preview

Mechanized Legless “Classic Rocker”
Team #7
Tom Dabrowski
Sarah Philo
Adam Rauwerdink

Outline
• Specifications• Physical challenges• Mechanics of rocking• Potential mechanisms• Competitor products• Project constraints• Design summary• Budget• Marketing• Conclusion

Specifications Rocking mechanism
Comfortable speed Does not surpass tipping angle (varying user weight) Does not require permanent attachment to floor
Control Simple power switch for user Control of audio by user Caretaker has master control for all power and for music track and
volume All easily accessible and with high ease of use
Audio Internal speakers Input from CD player accessible to caretaker

Physical Challenges
Users have wide array of physical and mental limitations
Cerebral palsy, Multiple sclerosis, varying levels of paralysis Coordination Muscle control Mental abilities and attentiveness Seizures of varying intensity (some CP)

Mechanics of Rocking
mg
mg
Equilibrium, all in lineCenter of curvature of rocker
Center of gravity of chair and occupant
Point of contact with ground
No moment

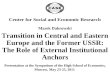
Mechanics of Rocking (con’d)
R
h
mg
mg(R-h)sin(θ)
Chair rotatedRestoring moment from force of gravity
Moment taken about point of contact with ground
M=IαMoment = (Moment of Inertia) x (Angular Acceleration)
-mg(R-h)sin(θ)=mh2α
Frequency of rockingDependent on radius of curvature and occupant center of gravity

Mechanics of Rocking (cond’d)
www.exoticoutdoors.com/swing.pdf

Potential MechanismsRack-and-pinion styled
Motor turns stationary small gear over a long, linear piece attached to chair back
Counterweights Like an elevator system
Linear Actuator Rod extends, pushes up on
chair back Rod returns, pulls down
chair back

Competitor Products/Previous Projects
• Electronic and Mechanical Assistant Technologies – Motorized Rocking Chair
•NSF Project – Rensselaer Polytechnic Institute – 1989 – “The Mechanical Rocking System”

• Various non-mechanized legless rockers, available at many major retailers (Wal-Mart, Target, etc)
• Numerous patents granted for mechanized rocking systems
• Single instances (web forums)
Competitor Products/Previous Projects (con’d)

Project Constraints Safety
If 120V power is being used, must be completely isolated from possible shock and from chair fabric
Angle and speed of rocking must not cause tipping Environmental
Must be durable and capable of surviving moderate abuse
Should be able to withstand spilling of liquids and be easily cleaned
Economic Pre-built chair must be purchased

Project Constraints (con’d)
Control Caretaker must be capable of having master
control of the rocking Audio volume, track, and master power are
also to be under caretaker control
Construction Internal frame of chair will vary with models Ability to build off of frame will be dependent
on this

Design Summary

Budget $750 from National Science Foundation Chair prices ($30-$100)
Quality (frame, fabric) Accessories (speakers, audio input)
Motor ($16-$50) Power, RPM
Actuator ($100-$150) Power, length
Speakers ($40-$100’s) Wattage, size, quality
Accessories Amplifier ($100+) – probably excessive Subwoofer Linkage bars, brackets, mounts Frame material
Maximum Total: $500 (rest for error analysis)

Marketing
Target: special needs consumers who wish to enjoy a relaxing experience No physical input needed to rock Music enhances overall experience
• “Classic-Rocker”
Simplicity Basic controls Simple controls for caretakers

Conclusion
Will provide self-rocking motion for those with physical disabilities
Reliable, easy to use, and safe rocking mechanism
Final product will include implanted audio system to enhance the “experience”
Caretaker will have master control over all parts of the chair
Complete product will be sturdy self-contained unit that is easy to maneuver