Embed Size (px)
Citation preview

Mario J. Pinheiro
Mecanica e Ondas
– Curso e Problemas Resolvidos –
February 22, 2016
Springer


A memoria de Bento de Moura Portugal(1702-1776)


Foreword
Use the template foreword.tex together with the Springer document class SVMono(monograph-type books) or SVMult (edited books) to style your foreword in theSpringer layout.
The foreword covers introductory remarks preceding the text of a book that arewritten by a person other than the author or editor of the book. If applicable, theforeword precedes the preface which is written by the author or editor of the book.
Place, month year Firstname Surname
vii


Preface
Learn from yesterday, live for today, hope for tomorrow. The important thing is not stopquestioning.
- Albert EinsteinEste e um curso teorico-pratico de “Mecanica e Ondas” e que se destina a todos
os alunos de Engenharia e Fısica. Sao notas que foi redigindo ao longo das min-has aulas para os alunos de Engenharia Mecanica e de Engenharia Naval do Insti-tuto Superior Tecnico. Procuramos expor a materia com objectividade e com cunhopratico. Neste curso nao se pretende que se memorizem muitas formulas, apenasas essenciais, que assinalaremos no devido tempo. Procuramos transmitir conceitos,ideias e as leis da mecanica e, ao mesmo tempo, introduzir os princıpios funda-mentais da fısica. Nao e um curso em que se trata apenas da aplicacao numericadas formulas que fazem a materia da Mecanica e Ondas ! E fundamental aprendera pensar, porque so assim se podera compreender, criar, inovar ! E esta diferencano nıvel de apreensao que distingue um cientista, engenheiro, de um tecnico comformacao basica.
Alguns problemas de aplicacao procuram ilustrar melhor a aplicacao da materia.Todos os assuntos teoricos e exercıcios que estejam marcados com asterisco (F)sao facultativos, ou trata-se de materia para ler se o desejarem (ha tambem que tercultura cientıfica...)
No desenrolar do curso iremos conhecer quais foram as contribuicoes cientıficasde grandes mestres pensadores, como o foram Kepler, Galileu, Copernico, Maxwell,Einstein, entre uma pleiade de muitos outros. Os seus trabalhos constituem o fun-damento da nossa compreensao do mundo actual que, nao obstante, continua emperpetua transformacao. O curso de Mecanica e Ondas constitui tambem uma opor-tunidade para se introduzir tecnicas matematicas basicas: calculo diferencial e inte-gra, calculo vectorial, resolucao de equacoes diferenciais.
Estas notas de curso discordam ortograficamente.A Mecanica estuda o movimento e as suas causas.Introduziremos os elementos essenciais da linguagem da fısica:
• medidas de grandezas fısicas, unidade fısicas e padroes de unidades;
ix

x Preface
• calculo diferencial e integral;• algebra vectorial.
Comecaremos por introduzir os elementos da linguagem que descreve o movimento:
• partıcula pontual em movimento rectilıneo;• movimento no plano (movimento parabolico/balıstico);• trajectoria do movimento circular.
E de capital importancia que alcancemos uma boa compreensao da relacao entreforca e movimento, e veremos que essa relacao e bem representada pelas tres leisdo movimento de Newton.
Sempre que uma partıcula e acelerada, desacelerada, ou muda a direccao e sen-tido do seu movimento e porque esta sujeita a uma forca. As tres leis de Newtonestabelecem a relacao entre forca e movimento.
Veremos qual a relacao entre a teoria e a experiencia, pois que a fısica e umaciencia experimental. Toda a teoria deve estar fundamentada na experiencia.
A resolucao de problemas permitira adquirir uma solida compreensao das leis deNewton.
Fig. 0.1 Mecanica classica.
Em mecanica classica estudaremos o movimento de uma partıcula. O seu movi-mento e descrito atribuindo-lhe uma posicao em funcao do tempo.
O par de coordenadas (posicao + tempo) constitui um evento.A descricao do movimento de uma partıcula ideal requer unicamente a medida
da sua posicao, instante de tempo e massa.

Preface xi
Fig. 0.2 Partıcula ideal.
Posicao:Se a partıcula move-se ao longo de uma:
• curva→ 1 dimensao;• superfıcie→ 2 dimensoes;• volume→ 3 dimensoes.
A descricao do movimento requer
• a escolha de um sistema de referencia apropriado (a Terra, uma viatura, um planoinclinado,...) 1;
• um sistema de coordenadas com uma origem (sistema de eixos orientados);• instrucoes para associar o ponto material com o sistema de eixos e origem 2.
No ambito da Mecanica classica o espaco e a 3 dimensoes, espaco euclideano,isto e, a soma dos angulos internos de um triangulo no plano e: ∆ = 180 0.
O tempo e absoluto, isto e, a taxa de variacao do tempo (ou ritmo dos relogios)e independente do lugar e da velocidade (isto e, e o mesmo para todos os obser-vadores).
Fig. 0.3 Na base da Mecanica classica esta a suposicao de que o universo e regido por uma ge-ometria euclideana e o tempo e absoluto.
A obra de Sir Isaac Newton (1642 - 1727) intitulada “Philosophiae NaturalisPrincipia Mathematica” (publicada em 1686) constitui a base da explicacao cientıficado mundo fısico e nao foi alterada desde entao. As leis enunciadas por Newton:
• leis do movimento;• gravitacao universal;
constituem os fundamentos da engenharia e da fısica actuais. Nao obstante, foinecessario proceder a correccoes, pois que os postulados do espaco-tempo, taiscomo Newton os concebeu, nao sao totalmente exactos.
Fig. 0.4 Desvio de um raio de luz na proximidade de uma estrela.
Por exemplo, sabe-se que os raios de luz sofrem um desvio na proximidade deuma estrela, o que se deve ao facto de que a geometria na proximidade de umaestrela e distorcida, de tal forma que ∆ 6= 180 0.
1 Veremos mais tarde que este nao se confunde com o sistema de coordenadas.2 Por exemplo, se as coordenadas forem esfericas, teremos x = r sinφ cosθ , e, se forem coorde-nadas cilındricas, teremos por sua vez x = r cosθ , onde os sımbolos tem o significado habitual.

xii Preface
Relogios que se movam a velocidades proximas da luz (v∼ c), ou que estejam su-jeitos a campos gravıticos, registarao um ritmo temporal diferente quando compara-dos com relogios em repouso, ou longe da accao de campos gravıticos, fenomenoeste que tem o nome de dilatacao do tempo.
Existem outros domınios onde os conceitos da Mecanica Classica claramentenao se aplicam. E tambem o caso das estrelas de neutroes 3 onde se verificamaceleracoes da ordem dos a = 1011 g , e os buracos negros 4 que aprisionam a luz.Para descrever, compreender e predizer fenomenos com essa amplitude, foi criadapor Albert Einstein duas novas teorias:
• a Teoria da Relatividade Especial,• a Teoria da Relatividade Generalizada (onde se assume que a energia curva o
espaco-tempo, e e esta curvatura que dita a dinamica dos corpos).
Contudo, os efeitos acima referidos sao desprezaveis a baixas velocidades (vc) desempenhando um papel muito insignificante na mecanica newtoniana que ire-mos estudar.
As partıculas elementares nao podem ser estudadas no ambito classico, pois queelas normalmente se deslocam a v ∼ c, e numa escala temporal e espacial muitopequena, onde os efeitos quanticos adquirem uma importancia muito grande.
Lisboa, Instituto superior TecnicoSetembro 2015 Mario J. Pinheiro
3 Uma estrela de neutroes tem um raio tıpico de 12 km e resulta de um colapso gravitacional deuma estrela massiva e e constituıda maioritariamente de neutroes.4 Quando a estrela que colapsa tem uma massa superior a 5 vezes a massa do Sol, a estrelatransforma-se num Buraco Negro.

Agradecimentos
Agradeco a todos os estudantes que reviram o texto, em especial AB, Instituto su-perior Tecnico CD, Universidade Nova de Lisboa, ...
xiii


Contents
1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Nocoes Fundamentais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.1 Nocoes Fundamentais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Espaco e Tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.1 Nocoes pre-classicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2.2 Intervalos de tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2.3 Ordens de grandeza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2.4 Unidades derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.5 Incertezas em medicoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.6 Arredondamentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2.7 Sistemas de dimensoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2.8 Equacoes dimensionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2.9 Homogeneidade dimensional. Analise dimensional . . . . . . . . 112.2.10 Medidas de comprimento: distancias pequenas . . . . . . . . . . . . 122.2.11 Medidas de comprimento: longas distancias . . . . . . . . . . . . . . 132.2.12 Sistemas de coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2.13 Medidas de tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Movimento unidimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.1 Movimento unidimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Velocidade instantanea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.3 Movimento a velocidade constante (ou uniforme) . . . . . . . . . . . . . . . . 243.4 Rapidez de uma bala de espingarda; Metodos experimentais para
determinacao da sua velocidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.5 Aceleracao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.6 Aceleracao instantanea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.7 Aceleracao constante; caso particular . . . . . . . . . . . . . . . . . . . . . . . . . . 293.8 Aceleracao da gravidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.9 Equacao do movimento a =−g . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
xv

xvi Contents
3.10 Problema a 2 corpos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4 Vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.1 Vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.2 Representacao geral de vectores; Notacao; Deslocamento . . . . . . . . . 40
4.2.1 Vectores iguais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.2.2 Adicao de vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.2.3 Ordem da adicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.2.4 Soma de tres ou mais vectores . . . . . . . . . . . . . . . . . . . . . . . . . 424.2.5 Negativo de um vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.2.6 Subtraccao de vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.2.7 Multiplicacao de um escalar por um vector . . . . . . . . . . . . . . . 434.2.8 Regra do Paralelograma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.2.9 Componentes de um vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464.2.10 Resultante de um numero arbitrario de vectores . . . . . . . . . . . 474.2.11 Vectores unitarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.2.12 Representacao de um vector arbitrario . . . . . . . . . . . . . . . . . . . 494.2.13 Plano inclinado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.3 Multiplicacao de vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.3.1 Produto interno (ou escalar) . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.3.2 Produto externo (ou vectorial) . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.4 Estatica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.4.1 Stevinus de Bruges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5 Cinematica a 3 dimensoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.1 Cinematica em 3 dimensoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.1.1 Velocidade media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.1.2 Rapidez . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.1.3 Aceleracao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.1.4 Aceleracao: componentes a⊥ e a‖ . . . . . . . . . . . . . . . . . . . . . . 695.1.5 Movimento com aceleracao constante . . . . . . . . . . . . . . . . . . . 705.1.6 Movimento de projecteis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 715.1.7 Movimento balıstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 725.1.8 Estrategia na resolucao de problemas sobre projecteis . . . . . . 775.1.9 Movimento circular uniforme. Coordenadas cartesianas e
polares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785.2 Movimento circular nao uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6 Relatividade do Movimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 876.1 Relatividade do movimento. Transformacao de Galileu . . . . . . . . . . . 87
6.1.1 Velocidade relativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 906.2 Dinamica - Leis de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 926.3 Forcas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
6.3.1 Forcas fundamentais na Natureza . . . . . . . . . . . . . . . . . . . . . . . 936.3.2 Primeira Lei de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94

Contents xvii
6.3.3 Referenciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 956.3.4 Segunda lei de Newton ou princıpio fundamental da
mecanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 956.3.5 Definicao de massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 966.3.6 Superposicao de forcas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
7 Forcas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1017.0.7 Terceira lei de Newton ou lei da acao e reacao . . . . . . . . . . . . 101
7.1 Forca gravitacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1047.1.1 Peso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1067.1.2 Elevador acelerado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1077.1.3 Massa gravitacional, massa inercial . . . . . . . . . . . . . . . . . . . . . 1087.1.4 O Princıpio da Equivalencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 1087.1.5 Lei de Hooke. Molas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1097.1.6 Movimento com forca constante . . . . . . . . . . . . . . . . . . . . . . . . 1117.1.7 Polias ideais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1127.1.8 Friccao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1167.1.9 Forca de atrito e velocidade terminal . . . . . . . . . . . . . . . . . . . . 1217.1.10 Forca resistiva proporcional a velocidade . . . . . . . . . . . . . . . . 1227.1.11 Queda dos corpos no ar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1257.1.12 Cordas e postes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
8 Trabalho e Energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1338.1 Trabalho e energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
8.1.1 Trabalho a 1-dim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1358.1.2 Forca variavel, trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1358.1.3 Trabalho em 3-dim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
9 Formas de Energia. Teorema Trabalho-Energia Cinetica . . . . . . . . . . . 1419.0.4 Energia cinetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1419.0.5 Energia potencial gravıtica (ou gravitacional) . . . . . . . . . . . . . 1459.0.6 Conservacao da energia na presenca da gravidade e de
outras forcas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1469.0.7 Conservacao da energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1519.0.8 Forcas conservativas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1549.0.9 Energia potencial das forcas conservativas . . . . . . . . . . . . . . . 1569.0.10 Energia potencial de uma mola . . . . . . . . . . . . . . . . . . . . . . . . . 1579.0.11 Forca gravitacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1589.0.12 Sobreposicao de forcas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1599.0.13 Exercıcios suplementares de revisao . . . . . . . . . . . . . . . . . . . . 1629.0.14 Forcas nao-conservativas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1649.0.15 Relacao entre forca e energia potencial . . . . . . . . . . . . . . . . . . 165

xviii Contents
10 Equilıbrio e Estabilidade de um Sistema Fısico . . . . . . . . . . . . . . . . . . . . 16710.1 Curvas de energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16710.2 Equilıbrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
10.2.1 Equilıbrio e estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17010.3 Princıpios variacionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17210.4 Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17510.5 Formas de energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17710.6 Momento linear de uma partıcula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
11 Sistema de 2 partıculas. Centro de Massa . . . . . . . . . . . . . . . . . . . . . . . . . 18311.1 Sistema de duas partıculas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18311.2 Centro de massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
11.2.1 CM de um grupo de partıculas; procedimento geral . . . . . . . . 18911.2.2 CM de corpos solidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18911.2.3 CM de areas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19111.2.4 Movimento do centro de massa . . . . . . . . . . . . . . . . . . . . . . . . 19211.2.5 Energia de um sistema de partıculas . . . . . . . . . . . . . . . . . . . . . 197
11.3 Sistemas de massa variavel. Equacao do foguetao . . . . . . . . . . . . . . . . 19911.4 Centro de massa. Referencial do centro de massa. . . . . . . . . . . . . . . . 206
12 Colisoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20912.0.1 Choques no referencial do centro de massa . . . . . . . . . . . . . . . 209
13 Colisoes. Continuacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21913.1 Nocao de impulso. Colisoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
13.1.1 Colisoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22213.1.2 Colisoes elasticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22313.1.3 Colisoes elasticas a 2-dim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23113.1.4 Colisoes inelasticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23313.1.5 Colisoes. Sumario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23913.1.6 Exercıcio suplementar de revisao . . . . . . . . . . . . . . . . . . . . . . . 240
14 Cinematica do Corpo Rıgido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24314.1 Cinematica do corpo rıgido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
14.1.1 Rotacao em torno de um eixo fixo . . . . . . . . . . . . . . . . . . . . . . 24314.1.2 Movimento rotacional com aceleracao angular constante . . . 24614.1.3 Relacao entre a velocidade e aceleracao angular e linear . . . . 24714.1.4 Energia cinetica rotacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
15 Momentos de Inercia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25115.0.5 Momento de inercia dos corpos rıgidos . . . . . . . . . . . . . . . . . . 25115.0.6 Teorema dos eixos paralelos . . . . . . . . . . . . . . . . . . . . . . . . . . . 25515.0.7 Teorema do eixo perpendicular . . . . . . . . . . . . . . . . . . . . . . . . . 25515.0.8 Momento angular de uma partıcula . . . . . . . . . . . . . . . . . . . . . 25815.0.9 Movimento de rotacao de um solido rıgido. Equacao dos
momentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261

Contents xix
15.0.10Dinamica do corpo rıgido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26415.0.11Sistema isolado. Forcas internas . . . . . . . . . . . . . . . . . . . . . . . . 26615.0.12Dinamica rotacional: aceleracao angular ou torque . . . . . . . . 267
15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo . . . . . . 26715.1.1 Conservacao do momento angular e energia cinetica . . . . . . . 26915.1.2 Trabalho e energia no movimento rotacional . . . . . . . . . . . . . 27315.1.3 Teorema do trabalho-energia no movimento rotacional . . . . . 27415.1.4 Impulso angular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27515.1.5 Cilindros/esferas a rolar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27615.1.6 Movimento de rolamento de um corpo rıgido . . . . . . . . . . . . . 278
15.2 Giroscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28415.2.1 Dinamica linear do giroscopio . . . . . . . . . . . . . . . . . . . . . . . . . 28515.2.2 Nutacao do giroscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
16 Gravitacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28916.1 Lei da Gravitacao Universal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
16.1.1 Lei da Gravidade de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . 29116.1.2 Energia potencial gravitacional . . . . . . . . . . . . . . . . . . . . . . . . . 29216.1.3 Princıpio da sobreposicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29316.1.4 Energia potencial de uma calote esferica e de uma partıcula . 29416.1.5 Descricao da experiencia de Cavendish . . . . . . . . . . . . . . . . . . 29616.1.6 Analise elementar da orbita translunar . . . . . . . . . . . . . . . . . . . 29816.1.7 Energia potencial do sistema esfera-partıcula . . . . . . . . . . . . . 30016.1.8 Forca gravitacional exercida entre objectos com simetria
esferica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30216.1.9 Forcas gravitacionais sobre objectos extensos . . . . . . . . . . . . . 30216.1.10Forca de mares (ou forca tidal) . . . . . . . . . . . . . . . . . . . . . . . . . 30316.1.11Peso e forca gravitacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
16.2 Movimento planetario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30616.2.1 Velocidade de escape . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30816.2.2 Movimento Planetario Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . 30916.2.3 Propriedades Gerais do Movimento Planetario geral . . . . . . . 31116.2.4 Movimento planetario-sistema de 2 partıculas . . . . . . . . . . . . 31216.2.5 Orbitas caracterısticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31816.2.6 Orbitas circulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31916.2.7 Orbitas elıpticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32116.2.8 Leis de Kepler revisitadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
16.3 Fısica no sistema de coordenadas em rotacao . . . . . . . . . . . . . . . . . . . 326
17 Lagrangianos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33317.1 Introducao a Mecanica Lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
17.1.1 Princıpio da Mınima Accao . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33517.1.2 Equacoes de Lagrange para uma partıcula . . . . . . . . . . . . . . . . 33617.1.3 Momento generalizado ou momento conjugado.
Hamiltoniano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341

xx Contents
17.1.4 Alguns rudimentos de Mecanica Quantica nao-relativista ? . 34317.1.5 Metodo dos multiplicadores de Lagrange . . . . . . . . . . . . . . . . 345
17.2 Oscilacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35317.2.1 Movimento harmonico simples . . . . . . . . . . . . . . . . . . . . . . . . . 35417.2.2 Propriedades do MHS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35617.2.3 Sistema massa-mola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35617.2.4 Energia no movimento harmonico simples . . . . . . . . . . . . . . . 35917.2.5 Circuito LC e o papel das analogias em Fısica . . . . . . . . . . . . 36317.2.6 Pendulo simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36617.2.7 Solucao exacta do problema do pendulo simples . . . . . . . . . . 36817.2.8 Percussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
18 Oscilacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37718.1 Oscilacoes amortecidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
18.1.1 O factor Q de um oscilador . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38118.1.2 Oscilacoes forcadas: ressonancia e impedancia mecanica . . . 38318.1.3 Ressonancia da amplitude. Ressonancia da velocidade . . . . . 38518.1.4 Ressonancia da velocidade. Impedancia mecanica . . . . . . . . . 38718.1.5 Aspecto energetico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38918.1.6 Absorcao de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39018.1.7 Oscilacoes acopladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392
18.2 Conceito de onda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39918.2.1 Equacao das cordas vibrantes . . . . . . . . . . . . . . . . . . . . . . . . . . 40218.2.2 Intensidade de uma onda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40418.2.3 Modos normais de vibracao . . . . . . . . . . . . . . . . . . . . . . . . . . . 40418.2.4 Natureza das ondas sonoras . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411
19 Aplicacao da Mecanica dos Fluidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41719.1 Aplicacoes da mecanica dos fluidos . . . . . . . . . . . . . . . . . . . . . . . . . . . 417
19.1.1 O coeficiente de contraccao . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41819.1.2 Circulacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42019.1.3 Efeito Magnus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42219.1.4 Viscosidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42219.1.5 Ondas de gravidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424
20 Teoria da Relatividade Restrita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42720.1 Teoria da Relatividade Restrita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427
20.1.1 As inconsisteencias entre o eletromagnetismo e a mecanica . 42820.1.2 Reflexoes sobre o tempo e o espaco nos finais do seculo
XIX e inıcio do XX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42920.1.3 Experiencias de Michelson-Morley . . . . . . . . . . . . . . . . . . . . . 43020.1.4 As solucoes propostas por Lorentz e Poincare . . . . . . . . . . . . 43420.1.5 Postulados da Teoria da Relatividade Especial (ou Restrita) . 43620.1.6 Relatividade e medidas; ponto de vista operacional . . . . . . . . 43720.1.7 A transformacao de Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . . 438

Contents xxi
20.1.8 Invariantes de espaco-tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . 43920.1.9 O conceito de simultaneidade . . . . . . . . . . . . . . . . . . . . . . . . . . 44020.1.10Medidas relativistas de comprimentos . . . . . . . . . . . . . . . . . . . 44020.1.11Dilatacao do tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44120.1.12Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44320.1.13Transformacao relativista das velocidades . . . . . . . . . . . . . . . . 44320.1.14Momento linear relativista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44420.1.15E=mc2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44520.1.16Relacao entre o momento linear e a energia . . . . . . . . . . . . . . 446
20.2 O sistema de referencia preferido em Paul Dirac . . . . . . . . . . . . . . . . . 44720.2.1 A equacao de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44820.2.2 A bomba atomica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 450
20.3 Teoria da Relatividade Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45320.3.1 O Princıpio da Covariancia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45420.3.2 Tempo proprio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45520.3.3 Dilatacao do tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45520.3.4 Os Espacos Fibrados e a Teoria Quantica . . . . . . . . . . . . . . . . 455
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457


Acronyms
Use the template acronym.tex together with the Springer document class SVMono(monograph-type books) or SVMult (edited books) to style your list(s) of abbrevia-tions or symbols in the Springer layout.
Lists of abbreviations, symbols and the like are easily formatted with the help ofthe Springer-enhanced description environment.
ABC Spelled-out abbreviation and definitionBABI Spelled-out abbreviation and definitionCABR Spelled-out abbreviation and definition
xxiii


Chapter 1Introducao
1.1 Introducao
Procura que has-de encontrar,Se medo nao tiveres de trabalhar,Homens ha que tanto estudaramQue novas estrelas encontraram;E sabem no ceu descobrirComo se movem, nascem e morremE, ainda, do Sol os eclipses.Da nossa vida na Terra, qual o segredoQue o homem nao possa desvendar? - Alexion (poeta grego, Sec. IV AC)
A materia de base da ciencia e constituıda pelo conjunto de experiencias, observacoese medidas efectuadas pelo cientista. Com este material, o cientista procura umpadrao coerente onde o relacionamento entre as experiencias forma um todo consis-tente, intelıgivel. As leis ou princıpios fundamentais sao generalisacoes dos factosexperimentais. O metodo experimental permite validar as leis fısicas dentro dos lim-ites impostos pelas incertezas experimentais.
A mecanica tem por objecto o estudo do movimento e do equilıbrio dos cor-pos. Entende-se por o deslocamento de um corpo em relacao a outros corpos. Amecanica newtoniana e uma mecanica classica, nao relativista, que estuda o movi-mento dos corpos macroscopicos a baixas velocidades (quando comparadas com a ,c = 299792458 m/s)1.
A Mecanica precedeu as outras ciencias, tais como a Termodinamica e a Electro-magnetismo.
Alguns grandes sabios resolveram problemas particulares da estatica. Existemregistos que mostram a alavanca ter sido utilizada no Antigo Egipto e as polias foramutilizadas na Antiguidade para construcao de estatuas de centenas de toneladas.(287-212 A.C.) e teriam deixado obras sobre estatica. Aristoteles deu erradamente
1 Consulte o sıtio htt p : //physics.nist.gov onde podera encontrar informacoes sobre constantesfısicas fundamentais, unidade e incertezas.
1

2 1 Introducao
a condicao de equilıbrio da alavanca, m/m′ = v′/v, onde v e v′ sao as velocidade decada extremo da alavanca, onde se encontram as massas suspensas m e m′.
Foi (Sec. II A.C.) que deixou a condicao correcta de equilıbrio da polia, md =m′d′, sendo d e d′ o comprimento dos bracos. (1452-1519) ja teria compreendidono Sec. XV a utilidade do paralelograma das forcas, mas foi (1548-1620) que feza sua descricao sob forma rigorosa. A disciplina da Estatica foi completada por(1654-1722).
O desenvolvimento da dinamica foi mais demorado. Aristoteles defendeu errada-mente que os corpos mais pesados caıam mais depressa do que os mais leves eque uma pedra atirada ao ar descreveria uma recta ate certo ponto e depois cairiaverticalmente. (1564-1642) corrigiu os erros propagados por Aristoteles fazendoexperiencias com um relogio de agua e medindo o tempo de queda em planos incli-nados e mostrando que se a aceleracao for constante, a relacao entre a velocidadee a aceleracao e dada por v = at e a distancia percorrida e d = at2/s. Tambem de-scobriu o , compreendeu o movimento circular e a queda dos corpos mostrando quequalquer que seja a sua massa, todos caiem com a mesma aceleracao. (1571-1630)foi o primeiro astronomo a propor a orbita elıptica e a enunciar as tres leis basicasda mecanica celeste. Na medida em que esse estudo nao mostra de forma clara arelacaao entre a forca e a massa, eles se incluem na aarea da cinematica. Com basena observacao de que um relogio de pendulo calibrado num dado ponto da Terra in-dica um tempo cronologico diferente noutro ponto do planeta, (1629-1695) sugeriuque esse efeito se devia a atraccao terrestre. Mas foi com os princıpios fundamentaisda Mecanica, formulados pela primeira vez por Sir no celebre tratado intitulado “”,cuja primeira edicao remonta a 1687, que esta ciencia adquiriu um sistema completode princıpios. Em grande parte o que aqui se expoe e a Mecanica Newtoniana.

Chapter 2Nocoes Fundamentais
2.1 Nocoes Fundamentais
Saber e poder.
- Sir Francis Bacon, filosofo, polıtico e jurista ingles (1561 - 1626).A palavra vem de “maquina”. E uma ciencia que resultou da construcao de
aparelhos para levantar ou deslocar objectos com determinados fins praticos. Muitoantes de se conhecer qualquer regra sobre o funcionamento das maquinas ja se con-heciam as vantagens do que entao se designava de Poder Mecanico: a alavanca;a roda e o eixo; a polia; o plano inclinado; a cunha (ou duplo plano inclinado);o parafuso. Existem registros Egıpcios e Assırios de todos estes intrumentos, queteriam sido utilizados na construcao das piramides. Foi entao que aconteceu algoextraordinario, descobrindo-se regras que permitiam o uso seguro e eficaz dessasmaquinas; fundando-se uma nova ciencia.
A Mecanica desempenhou um papel fundamental no desenvolvimento das outrasciencias. A ciencia de 1 e os Escolasticos2 que a seguiram de perto, desenvolveramuma ciencia qualitativa e descritiva. A Mecanica actual e uma ciencia que mede efaz previsoes.
A surgiu muito antes da , a ciencia do movimento produzido por uma forca.Comecou com 3 que nos deu o e o . E durante um longo perıodo de tempo naohouve mais contribuicoes para esta ciencia. So em meados do Sec. XVI, foi alguemque voltou a dedicar-se a Estatica, estudando o equilıbrio num plano inclinado.
1 Aristoteles (384 a.C. - 322 a.C.) nasceu em Estagira. Foi discıpulo de Platao e professor deAlexandre, o Grande. Considerado um dos maiores pensadores de todos os tempos e criador dopensamento logico.2 O Escolasticismo foi uma doutrina professada por academicos nas universidades medievais noperıodo que decorre de 1100 a 1500 d.C. Integrava a filosofia antiga do tempo dos Gregos com afilosofia medieval crista. Baseava-se no julgamento, desprezando a observacao dos fenomenos.3 Arquimedes (287-212 a.C.) foi morto por engano por um soldado romano, apos a tomada deSiracusa durante a Segunda Guerra Punica. A sua sepultura foi decorada com o desenho de umaesfera dentro de um cilindro, uma das suas demonstracoes matematicas de que mais se orgulhava.
3

4 2 Nocoes Fundamentais
A partir de Stevinus toda uma pleiade de grandes cientistas contribuiu para os al-icerces da ciencia mecanica, entre eles: Galileu (1564-1642), Huygens (1629-1695),Newton (1642-1727), Descartes (1596-1650), Leibniz (1646-1716).
2.2 Espaco e Tempo
Todos os processos fısicos tem lugar no espaco e no tempo. Todas as leis fısicascontem, explıcita ou implicitamente, relacoes entre comprimentos (espaco) e inter-valos de tempo (duracao).
e a mudanca de posicao espacial dos corpos com o tempo. A posicao do corpoe uma posicao relativa, definida em relacao a outros corpos. Ate a actualidade, eapos a revolucao conceptual inaugurada por Einstein com a Teoria da RelatividadeRestrita, o conceito de posicao absoluta, isto e, a posicao de um corpo no espacoabsoluto nao tera qualquer sentido.
2.2.1 Nocoes pre-classicas
Na verdade, a nocao de espaco absoluto ou eter desde muito cedo entrou na lin-guagem da ciencia. 4 (544-460 AC) introduziu a nocao de contınuo em fısica, emoposicao a ordenacao descontınua de todos os corpos, incluindo a recta que, comotoda a figura geometrica, seria formada de monadas - corpusculos - postas sequen-cialmente, ideia defendida por 5 (c. 580 e 504 AC). Um dos discıpulos mais famososde Parmenides foi .
A ideia de Parmenides teve eco em Descartes que imaginava que o vacuo naoera vazio, que a materia e contınua e que ela forma uma coisa com extensao (resextensa).
Os trabalhos de Young, Fresnel e Huyghens afirmam a teoria ondulatoria da luzem contraposicao a teoria corpuscular da luz. Porem, permanecia por explicar ocaracter especıfico da sua propagacao. Servindo-se da analogia com a propagacaodo som, idealizaram que a onda luminosa fazia vibrar um suporte material elasticoe deformavel com propriedades exoticas, o eter 6.
Os trabalhos de , publicados em 1873 num trabalho notavel, mostraram que asondas electromagneticas e a luz tem uma origem comum (os campos electrico emagnetico) e mostraram igualmente que a sua propagacao requeria um substrato”material”, o eter luminıfero.
4 Ele resumiu o seu programa numa frase celebre: “Nao se pode conhecer o que nao existe, nem oenunciar: porque o que pode ser pensado e aquilo que pode existir sao uma mesma coisa”.5 , destacado discıpulo de Pitagoras, afirmou: “todas as coisas tem um numero e nada se com-preende sem o numero”.6 Ou ainda “aether” na linguagem dos maxwellianos, actualmente designa-se por vacuo fısico ouainda campo do ponto zero (em ingles, zero-point field).

2.2 Espaco e Tempo 5
Como veremos no capıtulo da mecanica relativista, o resultado nulo da , isto e, aaparente impossibilidade de se detectar o movimento no , veio evidenciar o caractersuperfluo do conceito de .
Esta e a concepcao actual do espaco-tempo, porque a tradicao Aristotelica domi-nou o pensamento europeu ate a Idade Media. A empederniu muitas das ideias deAristoteles ate ao exagero.
A nocao cosmologica que introduziu, sugeria que todo o universo e construıdoem 7 esferas, ocupando a Terra o seu centro. Todo o objecto tinha o seu lugar nat-ural, para o qual tenderia desde que nada o impedisse. Assim, o movimento eradeterminado pelas “causas finais” e accionado pelas “causas eficientes”.
A doutrina de Aristoteles argumentava que os corpos celestes, sendo constituıdospor materia mais perfeita do que os objectos terrestres, deveriam mover-se emorbitas perfeitas por natureza. Atendendo a que a figura geometrica mais perfeita e ocırculo, concluıa-se que os planetas deveriam descrever circulos em volta da Terra.O , para ajustar os desvios das trajectorias planetarias em relacao ao cırculo, intro-duziu (cırculos dentro de cırculos), convertendo o movimento dos planetas numamecanica extremamente complicada.
Com a Escolastica Medieval, o espaco adquiriu uma estrutura hierarquica e otempo so depois foi introduzido, no sentido em que foi imaginado um instante dacriacao do Universo com um final implıcito.
Com Nicolau Copernico (1473-1543) inaugurou-se uma revolucao no pensa-mento. Nao era mais necessario tanta orbita complicada para descrever movimentosbem simples. Bastava colocar o Sol no centro do sistema planetario. Esta singularvisao do Cosmos contribuiu para a evolucao da nocao do tempo, nao havendo ne-cessidade de conceber um instante da criacao do Universo e o seu terrıvel final. Aevolucao do pensamento a partir daqui levou a construcao duma visao do Cosmosonde nao ha pontos do espaco e nem instantes do tempo privilegiados. As leis daFısica podem ser referidas a qualquer ponto do Universo, assumidos como o centro,e estabelecer-se determinadas relacoes entre grandezas.
2.2.1.1 Comprimento
Todas as leis fısicas contem relacoes do tipo espaco-tempo. Comprimentos sao me-didos com reguas. So corpos rıgidos podem ser usados como reguas.
O padrao usado na medida de comprimentos e o . Em mecanica as tres sao:comprimento (L), massa (M) e tempo (T). Todas as outras quantidades fısicas ()podem ser expressas por meio dessas quantidades.
Em 1960 foi estabelecido um conjunto de padroes para essas quantidades funda-mentais - trata-se do (SI). As outras quantidades estabelecidas pelo comite criadopara o efeito sao:
• o Kelvin, para a , sımbolo (K);• o mol, sımbolo (mol), para a ;• o ampere, para a , sımbolo (A);• a candela para , sımbolo (cd).

6 2 Nocoes Fundamentais
No total constituem 7 unidades fundamentais.A necessidade de um padrao comum de unidades pode-se compreender com uma
situacao que ocorria com frequencia e completamente arbitraria: em 1120 o rei deInglaterra decretou que o padrao de comprimento no seu paıs seria o “yard”, igual adistancia que ia da ponta do seu nariz ate a ponta do braco do soberano...
Em 1979, em Franca definiu-se o metro como a decima milionesima parte dadistancia do Equador ao Polo Norte ao longo da linha horizontal () que passa porParis. Em Outubro de 1983 redifiniu-se o metro como a distancia percorrida pelaluz no vacuo durante o intervalo de tempo igual a 1/299792458 segundos. Estadefinicao estabelece que a e 299792458 m/s 7.
Uma e uma propriedade atribuıda aos fenomenos naturais, corpos, substanciasque pode ser quantificada, por exemplo, a massa ou a carga electrica. As quanti-dades fısicas podem ser usadas em equacoes matematicas utilizadas em ciencia etecnologia.
A e uma quantidade fısica particular, definida e adoptada por convencao, com aqual outras quantidades particulares da mesma especie sao comparadas de modo aexpressar o seu valor.
O valor de uma quantidade fısica e a expressao quantitativa (numerica) de umaquantidade fısica particular e e apresentada como o produto de um numero por umaunidade, o numero e o seu valor numerico. O valor numerico de uma quantidadefısica particular depende da unidade com que e expressa.
Por exemplo, a estatua equestre de D. Jose que se encontra no Terreiro do Pacotem a altura h = 14 m. Aqui h e a quantidade fısica. O seu valor expresso na unidade“metro” (sımbolo da unidade m) e 14 m. O seu valor numerico quando expresso emmetros e 14.
2.2.1.2 Massa
O padrao de massa e o kilograma (kg) e e definido como a massa do prototipointernacional em platina iridiada, sancionado pela Conference Generale des Poidset Mesures, reunida em Paris em 1889, e que se encontra depositado no Paveillonde Breteuil, em Sevres.
2.2.2 Intervalos de tempo
Intervalos de tempo sao medidos com relogios ou por qualquer outro processo repet-itivo, cıclico.
A sua unidade padrao e o segundo (s) e define-se como a duracao de 9192631770perıodos correspondentes a transicao entre dois nıveis hiperfinos do estado funda-
7 Esta definicao resulta do Postulado da Teoria da Relatividade Restrita, onde se define que avelocidade da luz e constante e nao depende da direccao de propagacao.

2.2 Espaco e Tempo 7
mental do atomo de cesio 133 8. Resumindo, as unidades destes objectos fısicosfundamentais encontram-se na Tabela 2.1.
Table 2.1 Unidades fısicas fundamentais.
Sistema de unidades L M TCGS cm g s
SI m kg s
Exemplo 1: Massa molecular relativa de uma substancia: E a massa de umamolecula dessa substancia relativa a unidade de massa atomica (ou dalton) u (iguala 1/12 da massa do isotopo do carbono-12, 12C). No estudo das reaccoes nuclearesdefine-se a massa do atomo 12C de modo exacto: 12C( atomo) = 12u. As massasde outras partıculas podem ser expressas em funcao desta unidade com grande pre-cisao:
1u' 1.66054×10−27 kg.
2.2.3 Ordens de grandeza
2.2.3.1 Comprimentos
• O mais longınquo quasar 9 (1987): 2×1026 m;• Comprimento de onda da luz visıvel: 10−7 m;• Raio do protao: 10−15 m.
2.2.3.2 Tempo
• Vida media de um protao: 1039 s;• Idade do Universo: 5×1017 s;• Vida media da partıcula mais instavel: 10−23 s;• Tempo de Planck 10: 10−43 s.
8 A precisao do relogio atomico de cesio e de 1 segundo em 300000 anos.9 Os quasares (abreviatura de Quasi stelars objectus) sao objectos de extrema luminosidade en-contrados na fronteira do Universo conhecido, distando mais de dois bilhoes de anos-luz da Terra.Tratam-se possivelmente de nucleos galacticos activados por buracos negros.10 Em fısica, o tempo de Planck (tP), e a unidade de tempo no sistema de unidades conhecido porunidades de Planck, denominado assim em honra de Max Planck. E o tempo que leva um fotaoviajando a velocidade da luz no vacuo a percorrer a distancia igual ao comprimento de Planck.

8 2 Nocoes Fundamentais
2.2.3.3 Massa
Em fısica, a massa representa o grau de aceleracao que um corpo adquirequando e sujeito a uma forca. Nao se deve confundir massa com peso 11. A massade uma quantidade de materia e determinada pelo numero de atomos de um dadoelemento quımico.
• Universo conhecido: 1053 kg;• Elefante: 5×103 kg;• Electrao: 9×10−31 kg.
2.2.4 Unidades derivadas
As unidades derivadas sao unidades que podem ser expressas a partir dasunidades de base atraves de sımbolos matematicos de multiplicacao e divisao.
Alguns exemplos:
• Volume = L3;• Densidade: ρ = m
V = massavolume = ML−3 (unidades no S.I. em kg/m3);
• Velocidade =comprimento
tempo = LT−3 (unidades no S.I. em m/s);
Por vezes e conveniente usar a massa molecular relativa de uma substancia. Massamolecular relativa de uma substancia e a massa de uma molecula dessa substanciarelativa a unidade de massa atomica u igual a 1/12 da massa do isotopocarbono-12, 12C. Usa-se em:
• Reaccoes nucleares: 12C = 12u (unidade de massa atomica ou Dalton);• Outras massas podem ser medidas relativas ao carbono com grande precisao.
1u∼ 1.66054×10−27 kg.
2.2.5 Incertezas em medicoes
Nas aulas de laboratorio terao oportunidade de adquirir bases mais solidas sobrediferentes metodos de tratamento de erros.
Qualquer medida de uma quantidade fısica nao e perfeita. Utiliza-se o termoincerteza da medicao para expressar este desvio em relacao ao seu valor real.Por outro lado convem ter presente que os resultados das medidas experimentaissao adaptados as necessidade reais, pois que ao procurar obter-se o valor de umaquantidade fısica com grande exatidao ha sempre um custo a pagar. Muitas analisessao efectuadas de modo a verificar se determinados limites nao sao ultrapassados,por exemplo, a concentracao de fluoreto na agua potavel nao devera ultrapassar o
11 O peso de um corpo e a forca exercida pelo campo gravitacional.

2.2 Espaco e Tempo 9
1 mg/l. Na era da globalizacao e fundamental comparar resultados no ambito docomercio e da industria. Tal so e possıvel se for conhecida a incerteza da medicaoda quantidade fısica.
Ao fazer medidas experimentais deve-se efectuar o seguinte procedimento (basico):
1. Especificar o mensurando 12;2. Identificar as fontes de incerteza (por exemplo, apoiando-se num diagrama de
Ishikawa ou Espinha-de-peixe) 13;3. Quantificar as componentes da incerteza;4. Escolher o metodo usado para os estimar (tipo A-analise estatıstica de uma serie
de observacoes; ou tipo B-outro que nao estatıstico de uma serie de observacoes);5. Se escolher o metodo do tipo A, calcule a media e o desvio-padrao;6. Se escolher o metodo do tipo B, entao um dos processos mais vulgar consiste em
assumir uma distribuicao triangular na ausencia de mais informacao. Estime osvalores do limite inferior e superior a− e a+ da quantidade fısica em questao demodo que a quantidade em questao tenha 100 % de probabilidade de se encontrarnesse intervalo. A melhor estimativa do resultado e dado por X = (a++ a−)/2com incerteza uc = (a+−a−)/2.
Os resultados experimentais apresentam-se usualmente na forma, Xexp = X ± uc,onde uc e normalmente o desvio-padrao. Significa que o valor experimental estaraprovavelmente algures entre X±uc com intervalo de confianca de aproximadamente68 %. Quando se faz um tratamento estatıstico, calcula-se o valor medio usando aequacao:
X =∑
ni=1 xi
n, (2.1)
e o desvio-padrao calcula-se com
uc =
√∑
ni=1(xi−X)
n−1. (2.2)
2.2.6 Arredondamentos
A regra mais simples e a seguinte:
• quando o algarismo imediatamente a seguir ao ultimo algarismo a ser conser-vado e inferior a 5, este ultimo algarismo a ser conservado permanece semmodificacao;
• quando o algarismo imediatamente seguinte ao ultimo algarismo a ser conser-vado e igual ou superior a 5, este ultimo algarismo a ser conservado e aumentadode 1 unidade.
12 O que esta sendo medido.13 Consulte o sıtio: http://pt.wikipedia.org/wiki/Diagrama espinha de peixe

10 2 Nocoes Fundamentais
2.2.7 Sistemas de dimensoes
A expressao de uma grandeza fısica A envolve a exactidao e precisao dessa medidaassim como o estabelecimento de uma equacao de dimensao:
[A] = F(L,M,T, ...). (2.3)
Esta equacao de dimensao e uma lei em potencia do tipo
[A] = Mα Lβ T γ . (2.4)
2.2.8 Equacoes dimensionais
A equacao de dimensao de uma grandeza fısica so tem significado num dado sistemade dimensao. Na tabela 2.2 apresentamos a equacao de dimensao de diferentesgrandezas fısicas.
Table 2.2 Equacoes dimensionais de diferentes grandezas fısicas.
Grandeza Equacao de definicao Equacao de dimensao (MLT)Massa F = ma [M]=MForca F = ma [F ] = MLT−2
Velocidade v = drdt [v] = LT−1
Aceleracao a = dvdt [a] = LT−2
Trabalho W = (F ·dr) [W ] = ML2T−2
Energia potencial −∆V =W [V ] = ML2T−2
Energia cinetica T = 12 mv2 [T ] = ML2T−2
A equacao de dimensao da forca e [F ] = MLT−2 e significa que a relacao entreas duas medidas F1 e F2 em dois sistemas de unidades diferentes e a seguinte:
F1 = MLT−2F2. (2.5)
Exercıcio: Converta newton (N) para dine 14.Arbitremos a relacao 1N = x dine:
F1 = x dine F2 = 1 Newton (2.6)
Isto implica que x = 103×102× (1)−2=105, ou seja 1 N = 105 dine.
14 Escreve-se mesmo dine por extenso.

2.2 Espaco e Tempo 11
2.2.9 Homogeneidade dimensional. Analise dimensional
Todas as equacoes fısicas satisfazem ao princıpio da homogeneidade dimen-sional.
Exercıcio: Durante um exame um estudante escreveu as seguintes equacoes:
v = v0 +at2
m d2xdt2 = g
(2.7)
Faca uma analise dimensional de cada equacao e diga porque nao estao correctas.A analise dimensional e util para:
1. encontrar erros nas formulas obtidas atraves de um calculo ou mesmo erros ti-pograficos;
2. util para verificacao das unidades no final de longos calculos matematicos.
A analise dimensional e baseada no facto que todos os termos de uma equacaoque descreve um fenomeno tem as mesmas dimensoes.
Aplicacoes da analise dimensional:
1 verificacao de derivacoes matematicas;2 transformacao de uma expressao matematica noutra forma mais simples para
verificacao experimental;3 Deducao, a partir de um grande numero de dados experimentais, de uma
formula mais apropriada para usos praticos;4 obtencao de coeficientes e relacionar o modelo matematico com o modelo
fısico;5 simplificacao da apresentacao de dados experimentais.
Resumindo, as regras a reter desde ja sao as seguintes:
• Numa equacao so podemos adicionar ou subtrair quantidades com a mesma di-mensao;
• as quantidades nos dois membros de uma equacao devem ter a mesma dimensao;• a analise dimensional nao permite verificar se constantes como π ,
√2,...estao
correctas ou nao.
Exemplo 2: Novo exemplo de analise dimensional com a equacao da velocidade:Estara a equacao v = v0 +at2/2 correcta?
A equacao dimensional sera[LT
]=
[LT
]+
12
[L
T 2
][T 2] (2.8)
o que nos confirma nao estar a equaca o correcta. Na verdade, sabemos que aequacao correcta e v = v0 +at.
Exemplo: - obtencao da expressao do perıodo do pendulo simples por meio daanalise dimensional.

12 2 Nocoes Fundamentais
Suponha que se verificou, por meio de uma experiencia, que o perıodo T de-pende da massa m do corpo suspenso pelo fio, comprimento do fio do peendulo l,aceleracao da gravidade g e angulo de deflexao θ .
Comecamos assim por assumir
T =Clwmxθ
ygz, (2.9)
sendo C uma constante numerica sem dimensoes. Repare que o angulo θ nao temdimensoes e portanto nao aparece no calculo. Repare que s = rθ ou seja, θ = s/re sendo o angulo o racio de dois comprimentos, nao tem dimensao. Voltemos aescrever a Eq. 2.9 na forma
[T ] = [L]w[M]x[L
T 2 ]z. (2.10)
Comparando o membro esquerdo com o direito, concluımos que as seguintes igual-dades dever ser verificadas:
1 = −2z (2.11)0 = w+ z (2.12)0 = x (2.13)
Resolvendo, obtemos z =−1/2, w = 1/2 e x = 0. Ou seja
T =C
√lg. (2.14)
Eventualmente, poderıamos deixar uma funcao adimensional f (θ) no membro di-
reito, T = C√
lg f (θ). A constante C so pode ser determinada experimentalmente.
Ja sabemos que C = 2π .
2.2.10 Medidas de comprimento: distancias pequenas
As medidas das grandezas fısicas so poderao ser directas se estiverem dentro de umagama de 4 ou 5 ordens de grandeza em torno da nossa escala natural, que e digamos,1 m.
2.2.10.1 Como medir comprimentos, areas e volumes
A medida de um comprimento consiste na determinacao do numero de centımetros efraccoes de centımetros que se encontram contidos nele. O metodo apropriado para

2.2 Espaco e Tempo 13
se proceder a medicao depende da magnitude do comprimento. Para comprimentosda ordem do milımetro pode-se usar o nonio (Vd. Fig. ??-(a)) 15
A fim de medir volumes de pequenos objectos pode-se colocar o objecto numtubo de ensaio ou copo 16 marcando um traco no seu exterior. Encha uma pipetacom agua ate um certo volume e deixe a agua escoar para o copo ate chegar ao tracomarcado. Anote o volume contido agora na pipeta. Retire o objecto e a agua do copoe volte a medir qual o volume na pipeta que corresponde ao preenchimento de aguano copo ate que se atinja o traco. A diferenca entre estes dois volume correspondeao volume do objecto.
Distancias pequenas sao medidas com um microscopico optico se as distanciasestiverem na gama dos comprimentos de onda da luz visıvel, ou por microscopiaelectronica se as distancias forem ainda menores, da ordem de 10−8 m (tamanhotıpico de um vırus).
A natureza ondulatoria dos objectos microscopicos introduzem limitacoes naprecisao com que a sua dimensao pode ser definida, expressas no “Princıpio daIncerteza de Heisenberg” 17.
2.2.11 Medidas de comprimento: longas distancias
Distancias longas sao medidas com frequencia pelo . Munidos de um 18, com me-didas efectuadas em dois pontos de observacao O e O
′distantes de b, poderıamos
determinar a distancia a um ponto A (Fig. 2.1):
d sinα = d′ sinα ′
d cosα +d′ cosα ′ = b (2.15)
donde se obtem:d =
b(cosα + sinα
sinα ′ cosα ′). (2.16)
Esta tecnica e muito usada em Astronomia, onde e conhecida como “” e e apli-cada na determinacao das distancias a que se encontram as estrelas.
15 Os franceses chamam-no vernier.16 No Brasil diz-se bequer.17 Werner Karl Heisenberg (1901 1976) foi um celebre fısico Alemao e premio Nobel. Foi um dosfundadores da Mecanica Quantica e um dos maiores fısicos do Sec. XX. Em Mecanica Quantica,o Princıpio da Incerteza de Heisenberg afirma que a localizacao de uma partıcula microscopicanuma pequena regiao faz com que a determinacao do seu momento linear fique afectado de umaincerteza, ou de modo complementar, quando se mede o momento linear de uma partıcula, talimplica que a posicao da mesma e incerta.18 O teodolito e um pequeno telescopio usado em geodesia ou astronomia. Geralmente tem a formade um tripe centrado sustentando uma plataforma onde se encontra o telescopio optico colocadode tal forma que permite a leitura em escalas graduadas dos angulos de direcao e de inclinacao deum determinado ponto.

14 2 Nocoes Fundamentais
Fig. 2.1 Metodo da triangulacao.
19 usou uma variante deste processo no sec. III a.C. para medir o raio da Terra.Aristoteles tinha argumentado que a Terra era redonda, pois era esta a forma dasombra projectada pela Terra sobre a superfıcie lunar sempre que se interpoe entreo Sol e a Lua. O seu metodo foi o seguinte: enquanto bibliotecario em Alexan-dria, disponha do registo de um grande numero de observacoes diarias sobre toda aespecie de eventos, soube que no dia do soltıscio de verao (o dia mais longo do ano),na cidade de Siena (actual Assuao) ao meio dia os raios solares eram exactamenteverticais. Ao mesmo tempo, em Alexandria, sobre o mesmo meridiano 20, os raiosolares faziam um angulo de θ ' 7.20 com a vertical. Os estafetas que percorriamessa distancia afirmam que 5040 estadios separam as duas cidades. Designemos pelaletra s a distancia entre Alexandria e Siena. Ora e facil de ver que
s = Rθ =⇒ R =sθ=
5000 stadia7.2
, (2.17)
donde se tiras
2πR=
7.2360
=150
=⇒C = 2πR = 50 s, (2.18)
eR =
5000×158m×502π
= 6.37×106 m. (2.19)
19 Eratostenes de Alexandria (276-194 a.C.), nascido em Cirene, actual Shahhat, Lıbia, foi umfamoso geografo grego. Eratostenes foi chamado ao Egipto por Ptolomeu III, fazendo-o precep-tor do seu filho e bibliotecario em Alexandria. A cidade de Alexandria foi um importante centrocultural, fundada por Alexandre Magno.20 Linha imaginaria passando pelos Polos Norte e Sul e fazendo um angulo recto com o equador.Eratostenes avanca com a ideia que um ponto a superfıcie da Terra poderia ser referenciado porduas linhas, uma perpendicular e outra paralela ao equador.

2.2 Espaco e Tempo 15
O era uma antiga unidade de medida e valia aproximadamente 158 m. Ou seja,Eratostenes determinou que o raio da Terra seria de 39250 m, obtendo-o com umerro inferior a 2 %, o que para a epoca constitui sem duvida um facto notavel.
2.2.12 Sistemas de coordenadas
A descricao do movimento e muito subtil. Por experiencia propria todos ja nosapercebemos que quando a chuva cai pode nos parecer que cai na vertical se es-tivermos parados, mas o mesmo fenomeno observado a partir de um carro em movi-mento ja nos parecera diferente, a chuva parecera cair obliquamente. O penduloem oscilacao tera um comportamento diferente quando observado num local em re-pouso, mas tera um comportamento diferente se for posto em oscilacao no interiorde uma viatura em andamento acelerado ou em vibracao devido a irregularidade dopiso. Estas situacoes sugerem uma relatividade do movimento e levanta a seguintequestao: em relacao a que deveremos reportar o movimento? Assim, deveremosdefinir um e com ele , isto e, um .
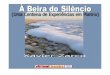
Distancias e angulos sao usados para fixar a posicao de um ponto no espaco,em relacao a um dado referencial. O caso mais simples e o das 21, definido poruma origem O e dois eixos ortogonais, em relacao aos quais a posicao de um pontoP e definida pelas suas coordenadas x (abscissa) e y (ordenada): P(x,y), tal comoilustramos na Fig. ??. Do estudo das conicas Descartes teve a ideia do sistema decoordenadas.
O e definido por uma origem O e uma direccao de referencia Ox, tal como mostraa Fig. 2.3. A posicao de um ponto P e fixada pela sua distancia r a origem e peloangulo θ que a direccao OP faz com Ox: P(r,θ).
O modo mais simples de visualizar o movimento de um ponto no espaco recorrea tres coordenadas (x,y,z) cartesianas (Vd. Fig. 2.4). Por exemplo, podemos aplicarum sistema a 3 dimensoes semelhante as coordenadas polares para descrever omovimento de uma nave a superfıcie da Terra com o auxılio de 3 numeros: (r,θ ,λ ).
21 O essencial das matematicas Gregas esta exposto nas obras de Euclides, Pitagoras e Arquimedes.Os Gregos desenvolveram uma visao muito clara e abstracta da natureza e dos seus elementos.Reduziram toda a construcao geometrica a algumas figuras que podiam ser tracadas com o auxıliode um esquadro e de um compasso. Os Gregos ja usavam de certa forma o que hoje designamos porcoordenadas, mas estas serviam apenas para a representacao, por exemplo, no estudo das conicas.
Assim, eles escreviam MP2
OA2 + MQ2
OB2 = 1, onde M representa um ponto sobre a elipse de semi-eixos
maior OB e semi-eixo menor OA sendo MP e MQ comprimentos. A grande descoberta de Descartesconsistiu em substituir MP por y e MQ por x, substituindo o que era uma propriedade geometricade uma elipse por uma expressao algebrica.
16 2 Nocoes Fundamentais
Fig. 2.2 Do estudo das conicas Descartes teve a ideia do sistema de coordenadas.
Fig. 2.3 Coordenadas polares.
Fig. 2.4 Coordenadas rectangulares. E o sistema de mais facil visualizacao.

2.2 Espaco e Tempo 17
2.2.13 Medidas de tempo
Qualquer fenomeno periodico pode ser medido por meio de um relogio. Exemplos:
• relogio de Sol;• relogio de agua (clepsidra) 22
• relogio de areais (ampulhetas);• relogio de pendulo;• relogio atomico
Os metodos directos de medidas de sao . Um dos aparelhos utilizados para estefim e o .
O principal metodo empregado para medir e o da :
t = T1/2 ln(
N0
N(t)
)(2.20)
onde T1/2 designa a . Por exemplo, para o U238, T1/2 ≈ 4.5× 109 anos. Se N0 rep-resenta a populacao inicial de atomos radioactivos, apos decorrido um tempo t seencontrara presente na amostra a populacao N(t). Existem ainda outros metodos demedida de perıodos de tempo longos:
1 datacao geologica pelo K40;2 datacao geologica com carbono radiactivo.
22 Usado por Galileu nas suas experiencias de cinematica.


Chapter 3Movimento unidimensional
...The entire preoccupation of the physicist is with things that contain within themselves aprinciple of movement and rest.
- Aristoteles.
A cinematica descreve a geometria do movimento de uma partıcula 1. Usa amatematica para descrever o movimento em funcao da posicao, da velocidade e daaceleracao. A dinamica estuda as causas do movimento.
Comecaremos pelo estudo do movimento de translaccao, por ser o mais simples.Utilizaremos o conceito de partıcula ideal. Uma partıcula ideal e um corpo cujadimensao e tao pequena que pode ser tido como a quantidade de materia colectadanum ponto singular.
3.1 Movimento unidimensional
Comecemos pela analise cinematica do movimento de um objecto (ou melhor, deuma partıcula ideal) numa recta orientada com origem no ponto O. A posicao dapartıcula e descrita por meio da abscissa x(t). Poderıamos medir as posicoes desteobjecto usando fotografia estroboscopica e construir uma (Tabela 14.1). Como pro-cesso alternativo, poderıamos tracar um grafico, tal como o que se apresenta naFig. 3.1.
O movimento mais simples e o descrito pela equacao linear:
x(t) = a+bt. (3.1)
O movimento uniforme caracteriza-se pelo facto de que percursos iguais, ∆x = x4−x3 = x2−x1 sao descritos por intervalos de tempos iguais, ∆ t = t4−t3 = t2−t1. Se a
1 Grande parte desta materia ja foi abordada no ensino secundario. Iremos aqui re-expor a materiaem jeito de revisao e, ao mesmo tempo, propor uma nova abordagem introduzindo o calculo difer-encial e integral ao nıvel elementar.
19

20 3 Movimento unidimensional
posicao de uma partıcula varia com o tempo, ela encontra-se em movimento, adquirevelocidade. Define-se velocidade media de uma partıcula por meio da expressao(vd. QN# 1):
v =∆x∆ t
=x(t2)− x(t1)
t2− t1, (3.2)
onde ∆x representa a mudanca da posicao e ∆ t representa o intervalo de tempodecorrido. O sinal ± designa o sentido do movimento. Repare que v pode ser posi-tivo ou negativo. |v| chama-se rapidez 2.
Na Fig. 3.1 mostra-se uma linha de universo . Define-se rapidez media pelaexpressao:
Rapidez media =distancia percorridatempo dispendido
=[L][T ]
(3.3)
ous =
dt> 0 (3.4)
sempre positivo e com unidades em m/s. Damos em seguida alguns valores tıpicos:
• Luz: 3×108 m/s;• Som: 300 m/s;• Corredor: 12 m/s;• Glaciar: 10−6 m/s;• Continente: 10−9 m/s.
Movimento e rapidez sao grandezas relativas porque dependem do sistema de re-ferencia. Por exempo, um corredor podera mover-se com a rapidez de 12 m/s nosolo, mas o planeta Terra move-se em torno do Sol com a velocidade de 29.8 m/s.
Qualquer movimento rectilıneo nao-uniforme chama-se acelerado.A velocidade media e dada pelo coeficiente angular da corda P1P2 que une os
dois pontos (x1, t1) e (x2, t2).Se v > 0 o movimento vai no sentido positivo do eixo Ox; se v < 0 o sentido do
movimento vai no sentido negativo do eixo Ox.
Table 3.1 Lei horaria do movimento
t(s) 0 1 2 3 ...x(m) 0 0.8 3.1 1.5 ...
Os conceitos deslocamento e distancia tem significados distintos. A velocidademedia representa o deslocamento por unidade de tempo. Por exemplo, o movimentode um corpo sobre um cırculo desde um ponto P e retornando ao mesmo pontoP apresenta um deslocamento nulo e contudo a rapidez 3 nao e nula, embora avelocidade media o seja.
2 Ou por vezes chama-se por celeridade.3 Em Ingles diz-se “speed”

3.1 Movimento unidimensional 21
Fig. 3.1 Cinematica e dinamica.
Exemplo 1: Um navio dirige-se de A para B a velocidade v1 = 10 km/h e de Bpara A a velocidade v2 = 16 km/h, ambas relativas ao rio. Determine: 1) a veloci-dade media do navio e, 2) a velocidade da agua no rio.
1.) Define-se a velocidade media por meio da expressao v = ∆x/∆ t. O tempototal dispendido no deslocamento e t = t1 + t2 = ∆x1
v1+ ∆x2
v2. Sabe-se que ∆x1 =
∆x2 = ∆x=AB. Portanto
v =2∆x
t1 + t2=
2v1v2
v1 + v2= 12.3km/h (3.5)
Repare que o factor 2 vem do facto do percurso total ser ∆x1 +∆x2.2.) Manifestamente a corrente do rio vai no sentido de B para A. Designando a
velocidade media do barco por v e a do rio por vr, temos de A para B
v = v1− vr (3.6)
e de B para Av = v2 + vr. (3.7)
Logo, conclui-se que
vr =v1− v2
2=−3km/h (3.8)
ou seja, 0.83 m/s.Exemplo 2: A velocidade de um atleta foi registada na tabela 3.2.- Determine v para os primeiros 1.53 s da corrida.

22 3 Movimento unidimensional
t(s) 0.00 0.18 0.25 0.37 0.43 0.54 0.74 0.84 1.12 1.37 1.53x(m) 0.00 0.61 0.91 1.52 1.83 2.44 3.66 4.27 6.10 7.93 9.14
Table 3.2 Posicoes e instantes de tempo registados durante a aceleracao inicial de um atleta numaprova de velocidade.
v =x2− x1
t2− t1=
9.14−01.53−0
= 5.97m/s.
- Determine v no intervalo de tempo t1 = 0.54 s e t2 = 0.93 s:
v =x2− x1
t2− t1=
4.88−2.440.93−0.54
= 6.3m/s.
3.2 Velocidade instantanea
A medida que o ponto P2 se aproxima do ponto P1 (na Fig. 7.7), ∆x/∆ t tende parao coeficiente angular da tangente T T ′ a curva neste ponto (cf. 7.7):(
dxdt
)t=t0
= lim∆ t→0
(∆x∆ t
)= lim
∆ t→0
[x(t0 +∆ t)− x(t0)
∆ t
](3.9)
Esta quantidade representa a derivada de x em relacao a t, no ponto t0. Se o limiteexiste para qualquer funcao de t, entao a funcao diz-se diferenciavel no ponto t0.
Fig. 3.2 Conceito de velocidade instantanea.
Qual e a velocidade no ponto P1? A velocidade instantanea no ponto P1 e iguala velocidade definida como o limite quando ∆ t→ 0. E igual ao declive da tangentea curva no ponto P1:

3.2 Velocidade instantanea 23
v = lim∆ t→0
∆x∆ t
=dxdt
. (3.10)
A velocidade e igual a derivada geral em ordem ao tempo da funcao posicao.Os valores numericos de v ou de v(t) sao independentes do sistema de coor-
denadas (se nao houver movimento relativo) pois que dependem da diferenca dasposicoes. Isto e, sao invariantes relativamente a escolha da origem ou do sistemade coordenadas.
Exemplo 3: Exemplo de uma partıcula movendo-se ao longo de uma linha rectacom a posicao dada por x(t) = 2.1t2 +2.80 (m).
a) De os valores de v e v(t) nos instantes t = 3 e t = 5 s.
x(3) = 2.1(3)2 +2.8 = 21.7 m (3.11)x(5) = 2.1(5)2 +2.8 = 55.3 m (3.12)
v =∆x∆ t
=x(5)− x(3)
2= 16.8 m (3.13)
b) Qual e a velocidade instantanea?
x(t +∆ t) = 2.1t2 +2.8+4.2t∆ t (3.14)∆x = 4.2t∆ t +2.1∆ t2 (3.15)
v(t) = lim∆ t→0
∆x∆ t
= lim∆ t→0
(4.2t +2.1∆ t) (3.16)
v(t) = 4.2t. (3.17)
c) Trace os graficos de x(t) e v(t).Exemplo 3: Calcule a derivada de x(t)= at2+bt+c, onde a, b e c sao constantes,
num ponto t qualquer.
x(t +∆ t) = a(t +∆ t)2 +b(t +∆ t)+ c= a(t2 +2t∆ t +∆ t2)+bt +b∆ t + c
(3.18)
donde decorre que
∆x = x(t +∆ t)− x(t) = 2at∆ t +a(∆ t)2 +b∆ t, (3.19)
ou seja,∆x∆ t
= 2at +a∆ t +b, (3.20)
e, no limite,
lim∆ t→0
(∆x∆ t
)= 2at +b. (3.21)
Finalmente obtem-se a expressao da derivada de x em ordem a t:

24 3 Movimento unidimensional
dxdt
= 2at +b. (3.22)
3.3 Movimento a velocidade constante (ou uniforme)
A partıcula move-se de acordo com uma funcao posicao-tempo correspondente auma linha recta. O declive de x(t) e constante.
v =∆x∆ t
= const.= vo. (3.23)
Tambem se temv(t) =
dxdt
= const.= vo, (3.24)
ou sejav = v, (3.25)
a velocidade media iguala a velocidade instantanea. Suponha x(t = 0) = xo. Tem-selogo
v = vo =x(t)−xo
t−0∴ x(t) = xo + vot.
(3.26)
E a equacao do movimento linear uniforme (Fig. 3.3).
Fig. 3.3 Movimento linear uniforme.
3.4 Rapidez de uma bala de espingarda; Metodos experimentaispara determinacao da sua velocidade
A determinacao da velocidade de um objecto com velocidade elevada pode ser feitautilizando tecnicas com grande importancia experimental em qualquer laboratoriodo mundo. Apresentamos em seguida dois metodos frequentes.
Repare que um projectil disparado por uma espingarda Winchester modelo .223Super Short Magnum e de 4345 km/h. Claramente, so usando tecnicas especiais seconsegue medir velocidades desta ordem de grandeza.
O primeiro metodo e o da medida directa do tempo de voo 4, como se encontrailustrado na Fig. 3.4.
4 Em ingles diz-se “Time-of-flight” method

3.4 Rapidez de uma bala de espingarda; Metodos experimentais para determinacao da sua velocidade25
Fig. 3.4 Velocidade de uma bala de espingarda. Metodo I: Determinacao directa do tempo de voo(Em ingles, “Time-of-flight” method).
O segundo processo chama-se metodo do veio de rotacao 5, que esta ilustradona Fig. 3.5.
O procedimento associado a este ultimo metodo consiste nas seguintes etapas:
• 2 discos de cartao colocados a distancia d um do outro e colocados sobre umeixo comum em rotacao
• o projectil perfura em primeiro lugar o primeiro disco;• Entretanto o veio vai rodando a medida que o projectil se desloca ao longo da
distancia d;• Finalmente, o projectil perfura o segundo disco.
Portanto, trata-se de efectuar as seguintes operacoes:
1. Medir o intervalo de tempo decorrido em 1 revolucao, (suponha que e TR =0.0293 s)
2. Atendendo que os discos se encontram dispostos arbitrariamente no veio, torna-se necessario definir uma linha recta, o que pode ser feito disparando primeiroum projectil com o veio em repouso;
3. Anote o sentido da rotacao do veio;4. Anote as marcas deixadas pelo projectil;5. Coloque o veio em rotacao e dispare o projectil;6. Meca o deslocamento angular, ∆θ .
O tempo de voo e dado por (supondo, por exemplo, que θ1 = 20o e θ2 = 77o):
∆ t =∆θ
360o 0.0293 =77o−20o
360o 0.0293 = 0.0046s. (3.27)
A rapidez do projectil e, por sua vez, dada por
c =d∆ t
=1.50m
0.0046s= 326.1m/s. (3.28)
5 Em ingles, “rotating shaft”

26 3 Movimento unidimensional
Fig. 3.5 Velocidade de uma bala de espingarda. Metodo II: veio em rotacao (em ingles, “rotatingshaft” method).
De modo a ter-se uma nocao dos erros inerentes a determinacao da rapidez us-ando o metodo experimental exposto, resumimos as fontes de erro mais significati-vas:
Erros e incertezas:
• Medida do tempo de revolucao do veio: ∆ tR = 0.001 s, inferior a 0.5 %;• Posicao dos orifıcios (na verdade, medida do angulo, ∆θ ∼ (5−10)%;• Medida da distancia ∆d ∼ 0.01 m, inferior a 1%.
Podemos avaliar o erro cometido na medicao usando o metodo do tipo-B, talcomo foi descrito no Fasc. 1:
Es = E( d∆ t ) =
d.E∆ t−∆ t.Ed∆ t2 = 1.5×0.001−0.0046×0.01
0.0046Es = 0.3m/s
(3.29)
O resultado experimental deve-se apresentar na forma:
sexp = (326.1±0.3)m/s. (3.30)
Usamos a regra do quociente:
d(uv) =
vdu−udvv2 . (3.31)
It is a good thing to proceed in order and to establish propositions. This is the way to gainground and to progress with certainty.
- Gottfried Wilhelm von Leibniz (1646-1716), filosofo, cientista, matematico, diplo-mata e bibliotecario alemao.

3.6 Aceleracao instantanea 27
3.5 Aceleracao
A velocidade e a posicao de uma partıcula podem ambas ser funcao do tempo.Quando o movimento de uma partıcula torna-se mais rapido ou mais lento, a veloci-dade varia: diz-se que o movimento e acelerado. A aceleracao e a taxa de variacaoda velocidade.
Se v = v1 no instante t = t1, e v = v2 no instante t = t2, a e dada pela expressao:
a =v2− v1
t2− t1=
∆v∆ t
=v(t +∆ t)− v(t)
∆ t,m/s2. (3.32)
a e igual ao declive do segmento de recta que liga os pontos (v1, t1) e (v2, t2) (vd.Fig. 3.6).
Fig. 3.6 Aceleracao media.
3.6 Aceleracao instantanea

28 3 Movimento unidimensional
Tal como fizemos ao definir a velocidade instantanea, em lugar de saber aaceleracao media num dado intervalo de tempo, podemos estar interessados em de-terminar a aceleracao instantanea num determinado instante de tempo t.
A aceleracao instantanea define-se como o valor limite quando ∆ t→ 0:
a(t) = lim∆ t→0
v(t +∆ t)− v(t)∆ t
=dvdt
. (3.33)
E a derivada da velocidade em relacao ao tempo. Em termos geometricos representao declive T T ′ do segmento tangente a curva da Fig. 3.7-(b) quando ∆ t→ 0.
Fig. 3.7 Velocidade vs. tempo.
Visto que a(t) = dv/dt, conclui-se que
a(t) =dv(t)
dt=
d2x(t)dt2 . (3.34)
Fig. 3.8 Velocidade vs. tempo. Nem sempre quando v=0 tem-se a=0.

3.7 Aceleracao constante; caso particular 29
Exemplo 1: Atencao, mesmo quando v(t)= 0, nao temos necessariamente a(t)=0 (vf. Fig. 3.7).
Exemplo 2: Seja v(t) = 12 β t2. Determine a nos instantes t = 1 s e t = 3 s.
v(t +∆ t) = 12 β (t +∆ t)2
= 12 β t2 +β t(∆ t)+ 1
2 β∆ t2
a = v(t+∆ t)−v(t)∆ t = β t + 1
2 β (∆ t)(3.35)
Temos ∆ t = 2 s. quando t = 1 s, tem-se a = β (1) + β (2)/2 = 2β (m/s2). Tem-se ainda v(t + ∆ t) = v(3) = β (3)2/2 = 4.5β . Tambem verifica-se v(t) = v(1) =β (1)2/2 = 0.5β . Daqui vem
a =∆v∆ t
=(4.5−0.5)
2β = 2β m/s2(3.36)
Se derivarmos a velocidade, obtemos
a(t) =dvdt
= β t. (3.37)
A aceleracao nos instantes t = 1 s e t = 3 s, e, resp., a(1) = β e a(3) = 3β . Podeverificar que
a =a(1)+a(3)
2= 2β . (3.38)
3.7 Aceleracao constante; caso particular
Trata-se de um caso particular de movimento com grande importancia. Por exem-plo, na proximidade da superfıcie terrestre todos os corpos caem com a mesmaaceleracao (constante), −→g .
a(t) = a = const. (3.39)
Quando a > 0, a aceleracao aumenta no sentido positivo do eixo Ox; quando a < 0,a aceleracao diminui no sentido de Ox. Como
a(t) =dvdt
= a = constante, (3.40)
∴ v(t)≡ linha− recta. (3.41)
Quando um corpo tem aceleracao uniforme (Fig. 3.9)
a(t) = a = const.a = a = v(t)−vo
t−0∴ v(t) = vo +at.
(3.42)

30 3 Movimento unidimensional
Aqui, vo e a velocidade inicial no instante t = 0. Se v > 0, a partıcula move-se nosentido positivo do eixo OX; se v < 0, a partıcula move-se no sentido negativo doeixo OX.
Fig. 3.9
Se uma partıcula se encontra em x0 no instante t = 0, apos um intervalo de tempo∆ t estara em
x(t) = x0 + vt. (3.43)
A expressao anterior resulta de se saber que o deslocamento e dado por ∆x = v∆ t.Agora coloca-se a seguinte questao: existe um valor medio da velocidade para umobjecto que se move com aceleracao constante desde a velocidade inicial vo ate a ve-locidade final v? A resposta e dada pelo Teorema da velocidade media (conhecidadesde a Idade Media):
v =12(vo + v(t)) =
12[vo + vo +at] = vo +
12
at (3.44)
Atendendo a que v(t) aumenta uniformemente com t, temos
x(t) = xo + vt. (3.45)
Esta expressao resulta de se saber que o deslocamento e dado por ∆x = vt.
∴ x(t) = x0 + vot +12
at2. (3.46)
x0 e a posicao inicial, vot representa a mudanca de posicao devido a velocidadeinicial que a partıcula possui, e at2/2 e a variacao da posicao devido a aceleracao.
As equacoes 3.46 e 3.44 dao v(t) e x(t) em funcao do tempo. Da Eq. 3.46obtemos t = v−v0
a . Substituindo na Eq. 3.44 obtemos sucessivamente
x(t)− x0 = v0v− v0
a+
12
(v− v0
a
)2
(3.47)
=1a[v0(v− v0)+
12(v− v0)
2] (3.48)
2a(x(t)− x0) = v2− v20 (3.49)
e, finalmente,v(t)2− v2
0 = 2a(x(t)− x0). (3.50)
Apos os calculos anteriores chegamos a seguinte expressao:
v2− v20 = 2a(x− x0). (3.51)

3.7 Aceleracao constante; caso particular 31
Podemos aplicar os conhecimentos de calculo diferencial ja adquiridos para obter avelocidade e a aceleracao instantaneas:
x(t) = x0 + v0t +12
at2, (3.52)
v(t) =dxdt
= v0 +at, (3.53)
a(t) =dvdt
= a, (3.54)
sendo a uma constante. No caso particular de a = 0, entao o movimento seria rec-tilıneo e uniforme (Fig. 3.10.
Fig. 3.10 Graficos da posicao, velocidade e aceleracao em funcao do tempo.
Exemplo 3: Em quanto tempo uma viatura percorre 30 m sabendo que parte dorepouso com uma aceleracao de 2.0 m/s2?
grandeza conhecida incognitax0 = 0 −v0 = 0 −
a = 2.0m.s−2 −x = 30m t =?
x = x0 + v0t +12
at2, (3.55)

32 3 Movimento unidimensional
30 = 0+(0)t +12×2t2. (3.56)
∴ t =√
30 = 5.5s. (3.57)
Exemplo 4: Uma partıcula encontra-se em x0 = 5 m no instante inicial t = 0,movendo-se com velocidade inicial v0 = 20 m/s. A partir desse momento comecaa desacelerar (i.e., com aceleracao oposta a velocidade). No instante t = 10 s apartıcula tem a velocidade v = 2 m/s.
a) Qual e a sua aceleracao?b) Determine a funcao posicao.c) Qual o intervalo de tempo que decorre ate a partıcula voltar a posicao inicial?Resposta:a) Temos as condicoes iniciais
x0 = 5mv0 = 20m/s
v(10) = 2m/s, quando t = 10 s.
Tem-se as seguintes equacoes
v = v0 +at (3.58)
x = x0 + vot +12
at2 (3.59)
v2− v20 = 2a(x− x0). (3.60)
Da primeira equacao obtem-se
a =v− v0
t=
2−2010
=−1.8 (3.61)
em unidades m/s2.b) Logo, obtem-se a funcao da posicao:
x(t) = 5+20t− 1.82
t2. (3.62)
c) Quando x = 5m, tem-se
5 = 5+20t−0.9t2
0.9t2−20t = 0(0.9t−20)t = 0
ou seja
t = 0∨ t =200.9
= 22.22s.

3.9 Equacao do movimento a =−g 33
3.8 Aceleracao da gravidade
Este e um problema com grande importancia pratica. Um corpo lancado na proxim-idade da superfıcie terrestre e acelerado para baixo sob a accao da gravidade. Naqueda livre o movimento processa-se com aceleracao constante.
Os Gregos, em particular Aristoteles (como referimos no Fasc. I) estudaram aqueda dos corpos, concluindo (erradamente) que os corpos mais pesados cairiammais rapidamente.
Foi com Galileu (1564-1642) que se compreendeu o problema da queda dos cor-pos, atraves de experiencias cuidosamente preparadas e observacoes aturadas.
Na verdade, todos os corpos caem para o centro da Terra com aceleracaoconstante, desde que outros factores externos, tais como o vento, o ar e efeitosaerodinamicos sejam excluıdos.
A aceleracao constante dos corpos na proximidade da superfıcie terrestre consti-tui uma das leis mais rigorosamente verificadas. O Barao Roland von Eotvos (1848- 1919) , fısico hungaro, realizou importante trabalho experimental sobre a gravi-dade, estudando em particular a equivalencia entre a massa gravitacional e a massainertial 6.
• aceleracao normal da gravidade, gn = 9.80665 m/s−2;• aceleracao da gravidade no Equador, g = 9.78031 m/s−2;• aceleracao da gravidade em Greenwich, g = 9.81170 m/s−2;• aceleracao da gravidade em Lisboa, g = 9.80054 m/s−2.
Devido a rotacao da Terra e a inhomogeneidade da crosta terrestre, g varia ligeira-mente com a latitude e a longitude. Veremos mais tarde como obter g com a lei dagravitacao universal, de Newton.
3.9 Equacao do movimento a =−g
Trace um sistema de coordenadas com o eixo Oy orientado para cima. Como javimos, as equacoes do movimento com a constante sao as seguintes:
a =−g (3.63)
v = v0−gt, (3.64)
y = y0 + vot− 12
gt2, (3.65)
ev2− v2
0 =−2g(y− y0). (3.66)
6 O chamado princıpio da equivalencia que constitui o postulado fundamental da Teoria da Rela-tividade Geral.

34 3 Movimento unidimensional
Esta ultima equacao esta relacionada com a equacao de conservacao da energia,Ec +Ep = const.
A aceleracao e por vezes medida em unidade de aceleracao da gravidade. Naaviacao comercial e recomendado que os materiais e os passageiros nao fiquemsubmetidos a aceleracoes superiores a 3.8 gees. Os avioes de combate F-16 supor-tam 9 gees. Os pilotos nao conseguem suportar tais aceleracoes porque o sanguee forcado a fluir da cabeca para as pernas, provocando uma diminuicao drasticada visao, mesmo providos de fatos apropriados e treino intensivo. Programas de in-teligencia artificial tomam o comando do aparelho ate que o piloto consiga recuperarda manobra 7
a(gees) =(
ag
), (3.67)
onde a nao tem dimensao. Assim,
a = ga(gees), (3.68)
onde g = 9.81 m/s2. Se a = 1 gee, entao a = g; se a = 2 gees, entao a = 2g.Exemplo 5: Uma bola e atirada do solo verticalmente para cima com uma ve-
locidade inicial de 25 m/s.a) Quanto tempo leva a atingir a altura maxima?As condicoes inicias sao as seguintes:
y0 = 0 mv0 = 25 m/s
a =−g
Usemos as equacoes
y(t) = vot− 12
gt2
v(t) = v0−gt
Qual a condicao que define a altura maxima? E t = T , v(T ) = 0. Donde,
v(T ) = 0 = v0−gT
T =v0
g=
25 m/s9.8m/s2 = 2.55 s.
b) Qual a altura atingida?
7 Com o desenvolvimento estrutural dos aparelhos e motores mais potentes, a tendencia e os avioesserem telecomandados (os chamados “drones”).

3.10 Problema a 2 corpos 35
v2− v20 =−2g(y− y0)
Quando v(T ) = 0, tem-se y(T ) = ym, donde
0− v20 = −2g(ym−0)
ym =v2
02g
=(25)2
2×9.81= 31.9 m.
c) Qual e a velocidade quando atinge de novo o solo?Tem-se
v2− v20 = −2g(y− y0)
v2− v20 = −2g(0−0)v = ±v0 =−25m/s.
d) Qual o tempo total de voo?
y = v0t− 12
gt2
0 = v0t− 12
gt2 = t(v0−12
gt)
t = 0∨ t =2v0
g= 2T = 2×2.55s.
3.10 Problema a 2 corpos
Exemplo 6: Um estudante quer apanhar um autocarro para o IST. O autocarropara no trafego. O estudante comeca a correr para o autocarro com uma velocidadede 6 m/s. Quando ele se encontra a 15 m do autocarro, este comeca a acelerar coma = 1 m/s2.
a) Sera que ele consegue alcancar o autocarro?b) Quantos segundos necessita para o alcancar?c) Quantos metros se deslocara o autocarro ate que o estudante o alcance?d) Qual o valor da aceleracao do autocarro a partir da qual o estudante nao con-
seguira seguramente alcancar o autocarro?Solucao: Para alcancar o autocarro ambos devem estar na mesma posicao ao
mesmo instante.Estudante: xe = x0e + vetAutocarro: xa = x0a + v0at + 1
2 at2.Requer portanto que: xe = xa
∴ x0e + vet = x0a + v0at +12
at2. (3.69)

36 3 Movimento unidimensional
isto e:t =
ve
a[1± (1− 2x0aa
v2e
)1/2]. (3.70)
O sinal± indica que podera haver em geral dois instantes de tempo correspondendoa dois eventos diferentes.
Por exemplo, escolha a origem do sistema de coordenadas na posicao em que seencontra o estudante no instante t = 0: x0e = 0 e x0a = 15 m. Temos tambem ve = 6m/s, a = 1 m/s2, v0a = 0.
Tem-se2x0aa
v2e
=2×15×1
6×6= 0.83, (3.71)
t =61[1± (1−0.83)1/2] (3.72)
donde resulta t = 3.5s 8 e t = 8.4 s 9.Qual a distancia percorrida pelo autocarro entretanto?
xa− x0a = v0at +12
at2 = 6m (3.73)
onde xa− x0a e a distancia percorrida, isto e, 6 m.Exemplo 7: Uma pedra e atirada para cima do alto de um edifıcio com a veloci-
dade inicial vertical de 20 m/s. O edifıcio tem 50 m de altura e a pedra passa a razaro edifıcio no seu movimento para baixo.
a) Ao fim de quanto tempo a pedra atinge o ponto mais alto da sua trajectoria?Sabe-se que
v = v0−gt. (3.74)
A altura maxima e atingida quando v= 0, pois que a pedra tem que inverter o sentidodo movimento e ha um momento em que ela para no ar para voltar a descer:
∴ t =v0
g=
209.8
= 2.04s. (3.75)
b) Qual e a altura maxima atingida?Parte-se da equacao
y = v0t− 12
gt2, (3.76)
donde se obtem
ymax = 20×2.04− 12×9.8× (2.04)2 = 20.4m. (3.77)
8 Corresponde ao intervalo de tempo que seria necessario para alcancar o autocarro quando esteainda esta parado.9 Correspondente ao tempo necessario para alcancar o autocarro depois de este partir em movi-mento.

3.10 Problema a 2 corpos 37
c) Qual e o tempo que a pedra demora a chegar ao ponto de onde foi lancada(onde esta o atirador)?
y = v0t− 12
gt2. (3.78)
O nıvel do atirador e o nıvel de referencia, a origem do sistema de coordenadas porquestao de conveniencia, y = 0.
∴ 0 = v0t−4.9t2, (3.79)
isto e, temos duas solucoes possıveis:
t = 0s t = 4.08s. (3.80)
A primeira corresponde ao instante inicial quando a pedra foi lancada (mas queaqui e irrelevante), e a segunda corresponde ao intervalo de tempo decorrido desdeo instante inicial 10.
d) Qual e a velocidade da pedra no instante t = 4.08 s?Temos
v = v0−gt (3.81)
v = 20−9.8×4.08 =−20.0m/s. (3.82)
Repare que a pedra chega ao nıvel do atirador com a mesma velocidade em modulocom que partiu, so o sinal se inverteu.
e) Qual e a posicao da pedra e do objecto quando t = 5 s?Recorremos de novo a expressao:
v = v0−gt = 20−9.8×5 =−29.0s. (3.83)
assim comoy = v0t− 1
2gt2. (3.84)
y = 20×5− 12×9.8×52 =−22.5m (3.85)
f) Com que velocidade, e em que instante de tempo, a pedra bate no solo?
−50 = vot− 12
gt2 (3.86)
Esta e uma equacao algebrica em t, cuja solucoes sao, t1 = 5.83 s e t2 = −8.75 s,esta ultima sem significado fısico.
A velocidade com que a pedra embate no solo, mais uma vez, determina-se pormeio da equacao v = 20−9.8×5.83 =−37.1 m/s.
10 Repare que se trata, de facto, de intervalos de tempo.


Chapter 4Vectores
What use is knowledge if there is no understanding?
- Joannes Stobaeus, natural de Stobi, Norte da Macedonia.
4.1 Vectores
Os vectores surgiram nas primeiras duas decadas do Sec. XIX com a representacaogeometrica dos numeros complexos. Caspar Wessel (1745–1818) , Jean Robert Ar-gand (1768–1822) , Carl Friedrich Gauss (1777–1855) , estao entre os que maiscontribuiram ao conceberem os numeros complexos como pontos num plano a2 dimensoes, isto e, como vectores bidimensionais. Em 1827, August FerdinandMobius publicou um livro intitulado “The Barycentric Calculus” no qual introduziusegmentos rectos orientados que designou por letras do alfabeto, que eram em todosos aspectos os actuais vectores usados na matematica, ciencia e engenharia.
Caspar Wessel desenvolveu uma tecnica algebrica para lidar com segmentos derecta orientados. Ele introduziu uma unidade i (o numero imaginario puro) paraexpressar qualquer segmento de recta orientado na forma a + bi, sendo a e bnumeros reais. No desenvolvimento da sua tecnica, Wessel obteve uma interpretacaodos numeros complexos 1. A invencao dos vectores, representados hoje na formaa−→i +b
−→j , onde
−→i e−→j sao vectores unitarios, foi apenas mais um passo audacioso
dos matematicos com pensamento criativo.Vectores sao entidades matematicas uteis para representar grandezas fısicas que
tem magnitude (modulo), direccao e sentido.
1 Na verdade so mais tarde desenvolvida de forma explıcita pelo matematico frances D’Argand,que sugeriu colocar o termo em num eixo vertical.
39

40 4 Vectores
Estudaremos neste capıtulo as operacoes fundamentais de adicao, subtraccao emultiplicacao vectorial. Em particular, estudaremos dois tipos de multiplicacao denatureza diferente (o produto interno e o produto externo).
Abordaremos esta materia fazendo dois tipos de aproximacoes: geometrica ealgebrica.
A vantagem adquirida no uso dos vectores reside em podermos descrever o movi-mento de uma partıcula ideal em qualquer sistema de coordenadas de modo com-pletamente geral. As leis da natureza devem ser invariantes relativamente a qualquersistema de referencia inercial (isto e, nao acelerado).
4.2 Representacao geral de vectores; Notacao; Deslocamento
Quando o movimento se processa no espaco a 3-dim, o deslocamento tem umadireccao, sentido e modulo. A grandeza (ou objecto matematico) que tem direccao,sentido e modulo e que da a distancia rectilınea entre dois pontos do espaco e umsegmento de recta ao qual se chama vector deslocamento. E representado grafi-camente por uma seta orientada que vai da origem do movimento ao seu termino,e cujo comprimento e proporcional ao seu modulo. Usualmente representam-se osvectores por meio de letras com uma seta em cima,
−→N . Mas e apenas uma questao de
convencao. Por exemplo, Feynman sugere a notacao IN. Deslocamento, velocidade,aceleracao, forca, torque e momento sao exemplos de vectores.
Grandezas fısicas ou magnitudes que nao tem direccao nem sentido sao es-calares. Massa, densidade, trabalho, energia e tempo sao escalares.
Em resumo, vectores sao representados por linhas orientadas ou setas. O compri-mento da linha orientada representa a sua magnitude, enquanto que a sua direccaocoincide com a do vector.
4.2.1 Vectores iguais
VECTORES IGUAIS: Dois vectores sao iguais se tem o mesmo comprimento edireccao. O valor de um vector nao se altera se o movermos de um ponto para outrodo espaco, desde que o seu modulo e direccao nao mudem.
4.2.2 Adicao de vectores
Considere dois deslocamentos sucessivos, tal como o mostra a Fig. 4.1.

4.2 Representacao geral de vectores; Notacao; Deslocamento 41
Fig. 4.1 Adicao de vectores.
Comecamos primeiro no ponto A e dirigimo-nos depois para o ponto B. O seg-mento recto orientado que vai de A para B e designado por vector deslocamento,como ja referimos. A seta indica o sentido do movimento 2
A linha ondulada representa a trajectoria real, efectivamente seguida pelo movel.Em seguida, este desloca-se de B para C. AC representa o resultado de ambos os doisdeslocamentos. Chama-se a resultante ou soma. Esta e a regra basica da “adicao devectores”, e este facto e representado pela seguinte equacao vectorial:
−→AB+
−→BC =
−→AC. (4.1)
Verifica-se que −→A =
−→B , (4.2)
somente se | −→A |=| −→B | tem o mesmo modulo, mesma direccao e sentido; alocalizacao e o ponto de aplicacao nao sao relevantes (vectores equipolentes). Asunidades fısicas tem que ser necessariamente as mesmas.
4.2.3 Ordem da adicao
A ordem da adicao nao afecta o resultado.
2 Atencao: na literatura anglo-saxonica fala-se so de direccao, com o significado simultaneo dedireccao e sentido.

42 4 Vectores
• a ordem da adicao e irrelevante;• a adicao so faz sentido para alguns tipos de vectores.
Fig. 4.2 Propriedade comutativa da adicao de vectores.
4.2.4 Soma de tres ou mais vectores
Quando se tem mais de dois vectores a soma processa-se tal como esta ilustrado naFig. 4.3.
Usa-se a propriedade distributiva da soma vectorial:
−→R = (
−→A +−→B )+
−→C
−→R =
−→A +(
−→B +−→C )
(4.3)
Forcas podem ser representadas por linhas rectas: Para definir uma forca enecessario especificar: i) o seu ponto de aplicacao; (ii) a sua direccao; (iii) a suamagnitude. Assim,
−→AB representa uma forca actuando de A para B.

4.2 Representacao geral de vectores; Notacao; Deslocamento 43
Fig. 4.3 Soma de tres ou mais vectores.
4.2.5 Negativo de um vector
Um vector−→A multiplicado por um escalar −1 resulta num vector antiparalelo, com
o mesmo modulo mas sentido contrario, −−→A :
−→A +(−−→A ) = 0 (4.4)
4.2.6 Subtraccao de vectores
A subtraccao de dois vectores−→A e−→B e definido como a soma de
−→A com −−→B
( 4.4-(a)): −→C =
−→A −−→B =
−→A +(−−→B ). (4.5)
4.2.7 Multiplicacao de um escalar por um vector
Um vector−→A multiplicado por um escalar λ e o vector λ
−→A que tem o modulo | λ |A
e e paralelo a−→A se λ e positivo e e antiparalelo a
−→A se λ e negativo ( 4.4-(b)).

44 4 Vectores
Fig. 4.4 a) - Subtracao de vectores; b) - Multiplicacao de um escalar por um vector.
Por exemplo:−→F = m−→a ,
−→F e −→a tem a mesma direccao e sentido, apesar de a
massa m ter unidade propria (kg, no SI).
4.2.8 Regra do Paralelograma
A Regra do Paralelograma constitui o fundamento teorico da composicao e resolucaodas forcas.
DEFINICAO DE FORCA: Forca e a causa que induz a variacao da velocidade deum corpo com massa.
Pode-se entender por forca um puxao ou empurrao.Os resultados das ultimas seccoes dao-nos dois metodos para adicionar vectores
graficamente.METODO DO TRIANGULO: Mova um dos vectores sem mudar a sua direccao
ate que a sua origem coincida com o terminus do outro vector. Complete o triangulotracando um vector com a origem coincidindo com o primeiro vector. O novo vectore a resultante dos dois vectores dados.
METODO DO PARALELOGRAMA: Desloque um dos vectores ate que a suaorigem coincida sobre o outro vector, complete o paralelograma, e depois trace umvector com uma origem comum aos outros dois vectores dados e que forma umadiagonal do paralelograma. O novo vector e a resultante dos dois vectores dados.
PROPOSICAO 1. Quaisquer duas forcas que actuam sobre uma partıcula saoequivalentes a uma unica forca representada pela diagonal do paralelograma cu-

4.2 Representacao geral de vectores; Notacao; Deslocamento 45
jos lados sao essas duas forcas; e reciprocamente, se uma unica forca for represen-tada por uma linha recta, se desenharmos um paralelograma tendo por diagonal estarecta, esta forca pode ser substituıda por duas forcas representadas pelos dois ladosdo paralelograma. Veja a Fig. 4.5-(a) para ilustracao da ideia.
Fig. 4.5 (a) - O paralelograma das forcas; (b) - resolucao trigonometrica.
PROPOSICAO 2. A expressao da resultante de dois vectores −→a e−→b inclinados
em relacao um ao outro de um angulo φ , consiste num vector resultante−→c , tal que:
R =| −→OC |=√
a2 +b2+2a ·b. (4.6)
Resolvendo o triangulo formado pelos dois vectores da Fig. 4.5-(b) obtem-se:
c2 = a2 +b2 +2abcosφ(a)tanθ = bsinφ
a+bcosφ(b), (4.7)
onde a, b e c sao as magnitudes de −→a ,−→b e −→c , respectivamente, enquanto que φ e
θ sao os angulos que−→b e −→c fazem com −→a . A Eq. 5.20-(a) determina a magnitude
e a Eq. 5.20-(b) a direccao de −→c .LEI DOS SENOS: A lei dos senos estabelece que para um triangulo arbitrario com
lados a, b e c e angulos opostos a esses lados α , β e γ:
asinα
=b
sinβ=
csinγ
. (4.8)

46 4 Vectores
Exemplo 1: Uma partıcula desloca-se 10 cm N 30o E, depois 10 cm E. Determineo deslocamento final.
Representando os deslocamentos e a sua resultante pelos vectores −→a ,−→b e −→c ,
obtemos:c2 = a2 +b2 +2abcosφ
= (10)2 +(10)2 +2×10×10× cos(60o)= 300cm2
∴ c = 10√
3cm= 17.3cm
tanθ = bsinφ
a+bcosφ
= 10cm.sin(60o)10cm+10cm.cos(60o)
=√
33
∴ θ = 30o.
(4.9)
O deslocamento resultante tem modulo 17.3 cm e esta orientado ao longo dadireccao N 60o E.
4.2.9 Componentes de um vector
A projeccao de um vector sobre uma linha e chamada de componente do vector aolongo da linha.
Um vector fica completamente definido pelas suas componentes. Embora o vec-tor nao dependa do sistema de coordenadas, as suas componentes dependem dessaescolha (cf. Fig. 4.6). As componentes de um vector sao muito uteis na algebra 3
vectorial.
Fig. 4.6 Componentes de um vector em coordenadas cartesianas em duas dimensoes.
3 A palavra algebra e a a variante latina da palavra Arabe “al-jabr”. Esta palavra foi usada pelogrande matematico arabe Mohammed ibn-Musa al-Khowarizmi cerca de 825 no seu livro escritoem Bagdad e intitulado “Hidab al-jabr wal-muqubala”.

4.2 Representacao geral de vectores; Notacao; Deslocamento 47
O procedimento consiste em:
• escolher um sistema de coordenadas;• escolher uma origem no pe do vector;• P(x,y,z) e um ponto arbitrario com coordenadas (x,y,z);• −→r e o vector posicao orientado da origem para o ponto de coordenadas (x,y,z).
Se −→a tiver componentes ao longo dos tres eixos num sistema rectangular (oucartesiano), as seguintes equacoes expressam o vector em termos das suas compo-nentes: −→a =−→a x +
−→a y +−→a z
ax = acosα1ay = acosα2az = acosα3
a =√
a2x +a2
y +a2z
(4.10)
e onde α1, α2 e α3 sao os angulos que −→a faz com os eixos coordenados.
4.2.10 Resultante de um numero arbitrario de vectores
A resultante de um numero de vectores −→a ,−→b , −→c , etc., pode ser obtida seja por um
metodo grafico que leva ao tracado de um polıgono, ou por um metodo analıtico quepassamos a descrever.
Escrevemos os vectores dados e as suas componentes:
−→a =−→a x +−→a y +
−→a z,−→b =−→b x +
−→b y +
−→b z,
...−→r =−→r x +
−→r y +−→r z.
(4.11)
A resultante e o somatorio dos vectores:
−→r =−→a +−→b +−→c + ... (4.12)
Juntando os termos, obtemos
−→r x +−→r y +
−→r z = (−→a x +−→b x + ...)+(−→a y +
−→b y + ...)+(−→a z +
−→b z + ...) (4.13)
Dado a independencia dos eixos, podemos ainda escrever
−→r x =−→a x +
−→b x +
−→c x + ...,−→r y =−→a y +
−→b y +
−→a y + ...,−→r z =
−→a z +−→b z +
−→c z + ...(4.14)
Podemos agora escrever as Eqs. vectoriais 4.14 na forma algebrica (porque?):

48 4 Vectores
rx = ax +bx + cx + ...,ry = ay +by + cy + ...,rz = az +bz + cz + ...
(4.15)
A resultante e de imediato obtida usando o metodo analıtico exposto anteriormente:
r =√
r2x + r2
y + r2z ,
cosα1 =rxr ,cosα2 =
ryr ,cosα3 =
rzr ,
(4.16)
onde α1, α2 e α3 sao os angulos que −→r faz com os eixos (Fig. 4.7).
Fig. 4.7 Adicao de um numero arbitrario de vectores.
Exemplo 2: Um homem caminha 3 km N 30o E, depois 1 km E, depois 3 km S45o E, depois 4 km S, depois 1 km N 30o W. Determine a sua posicao final.
Representando graficamente os vectores deslocamento sucessivos obtemos aFig. 4.8, com −→r a resultante.
Fig. 4.8 Problema.
Para determinar −→r analiticamente iremos primeiro determinar os seus compo-nentes. Temos sucessivamente:
rx = [3cos60o + cos0o +2cos(−45o)+4cos(−90o)+ cos(120o)]km= (2+
√2)km,
= 3.41kmry = [3sin(60o)+ sin(0o)+2sin(−45o)+4sin(−90o)+ sin(120o)]km
= (2√
3−√
2−4)km=−1.95km
∴ r =√
r2x + r2
y
= 3.93km
(4.17)
A direccao e dada pela seguinte relacao:
tanθ =ryrx= −1.95
3.41∴ θ =−37.1o.
(4.18)
A posicao final do homem e a 3.93 km S 52.9o E do seu ponto de partida.

4.2 Representacao geral de vectores; Notacao; Deslocamento 49
4.2.11 Vectores unitarios
−→i ,−→j , e−→k sao tres vectores de modulo igual a 1 unidade (sem dimensao) apontando
ao longo dos eixos das coordenadas. Podem-se construir outros vectores a partirdestes mais elementares.
Exemplo 3: Componentes do vector posicao −→r a 2 dimensoes.Escreve-se o vector na forma:
−→r = rx−→i + ry
−→j , (4.19)
onde rx e ry sao as componentes cartesianas do vector−→r . Ha quem escreva na forma
−→r =−→rx +−→ry , (4.20)
ou−→r = x
−→i + y
−→j . (4.21)
O modulo do vector e r =√
x2 + y2, sendo que x = r cosθ e y = r sinθ , e tanθ =y/x. O angulo θ e o angulo que o vector −→r faz com o eixo Ox.
Qual e o significado da expressao:
x−→i + y
−→j + z
−→k =? (4.22)
Significa que se deslocar de x unidades ao longo do eixo Ox, de y unidade ao longode Oy, e de z unidades ao longo de Oz, acabamos por tracar o vector −→r :
−→r = x−→i + y
−→j + z
−→k . (4.23)
4.2.12 Representacao de um vector arbitrario
Escolha um sistema de coordenadas no “pe” do vector−→A . Projecte perpendiculares
da ponta final do vector nos eixos das coordenadas. Ficam determinados assim as“componentes” do vector, digamos Ax, Ay e Az. Podemos entao escrever:
−→A = Ax
−→i +Ay
−→j +Az
−→k . (4.24)
Exemplo 4: 2-dimSejam as componentes de um vector:
Ax = Acosθ
Ay = Asinθ .(4.25)
O vector escreve-se na forma
−→A = Ax
−→i +Ay
−→j (4.26)

50 4 Vectores
−→A = Acosθ
−→i +Asinθ
−→j . (4.27)
e o modulo de−→A e dado por:
| −→A |= A =√
A2x +A2
y . (4.28)
Exemplo 5: Considere dois vectores−→A (dirigido no sentido positivo do eixo Ox)
e−→B (fazendo um angulo de 600 com o eixo Ox). Calcule a sua soma
−→A +−→B .
Comece por escolher o sistema de coordenadas mais conveniente, por exemplo,escolha um dos eixos orientado ao longo de um dos vectores.
Os modulos dos vectores sao, | −→A |= 3 e | −→B |= 4. Tem-se sucessivamente
−→A = A− x
−→i +Ay
−→j = A
−→i +0
−→j (4.29)
−→B = Bx
−→i +By
−→j = Bcos60o−→i +Bsin60o−→j (4.30)
−→R = (
−→A +−→B ) = (Ax +Bx)
−→i +(Ay +By)
−→j (4.31)
= (A+Bcos60o)−→i +(0+Bsin60o)
−→j (4.32)
= (3+4cos60o)−→i +(4sin60o)
−→j = 5
−→i +3.46
−→j (4.33)
Obtemos seguidamente o modulo da resultante:
| −→R |=√
R2x +R2
y =√
52 +3.462 = 6.08
Exemplo 6: Vectores a 3-dimOs vectores a 3 dimensoes tambem se podem representar tal como esta na Fig.
Fig. 4.9 Representacao de um vector a tres dimensoes em funcao dos angulos dos cosenos direc-tores
Ax = Acosα
Ay = Acosβ
Az = Acosγ
(4.34)

4.2 Representacao geral de vectores; Notacao; Deslocamento 51
α , β e γ sao os angulos dos cosenos directores da recta OA.Verifica-se
cos2α + cos2
β + cos2γ = 1. (4.35)
Os angulos α , β e γ nao sao todos independentes.O modulo de
−→A e A =
√A2
x +A2y +A2
z e
cosα =Ax
A(4.36)
cosβ =Ay
A(4.37)
cosγ =Az
A(4.38)
O vector−→A pode escrever-se
−→A = Acosα
−→i +Acosβ
−→j +Acosγ
−→k . (4.39)
Sejam−→A = Ax
−→i +Ay
−→j +Az
−→k
−→B = Bx
−→i +By
−→j +Bz
−→k
(4.40)
A adicao e dada pela operacao:
−→A +−→B = (Ax +Bx)
−→i +(Ay +By)
−→j +(Az +Bz)
−→k (4.41)
e a operacao da subtraccao e feita da seguinte forma:
−→A −−→B = (Ax−Bx)
−→i +(Ay−By)
−→j +(Az−Bz)
−→k (4.42)
Pode-se generalizar estas operacoes a um numero arbitrario de vectores efectuando-as par a par.
4.2.13 Plano inclinado
Considere a figura 4.10 abaixo desenhada de um plano inclinado.
Fig. 4.10 Vector num plano inclinado.
Decomponha o vector−→B :
• Bq: paralelo a x;

52 4 Vectores
• B⊥: perpendicular a x e dirigido ao longo de -Oy.
Isto e: −→B = Bq
−→i +B⊥
−→j , (4.43)
sendoBq = | −→B | cosθ
B⊥ = − | −→B | sinθ .(4.44)
onde θ = 300.
4.3 Multiplicacao de vectores
4.3.1 Produto interno (ou escalar)
Considere os vectores−→A e−→B . O produto interno e dado por
−→A ·−→B = ABcosφ , (4.45)
onde o angulo φ ≤ 1800. O resultado e um escalar, um numero.- Propriedade comutativa
−→A ·−→B =
−→B ·−→A . (4.46)
−→A ·−→A = AAcos00 = A2 (4.47)
Os vectores sao paralelos.
−→A · (−−→A ) =−A2. (4.48)
Os vectores sao antiparalelos.A Fig. 7.6 ilustra como se pode obter as componentes de A ao longo de B e
vice-versa.Note que Bcosφ e a projecao de
−→B em
−→A e que Acosφ e a projecao de
−→A em
−→B .
0o < φ < 900 (−→A ·−→B )> 0
900 < φ < 1800 (−→A ·−→B )< 0
φ = 900 (−→A ·−→B ) = 0
(4.49)
No ultimo caso−→A e−→B sao perpendiculares um ao outro. O produto interno de dois
vectores constitui um excelente teste de verificacao da sua perpendicularidade.Quando os vectores unitarios sao paralelos, verifica-se:

4.3 Multiplicacao de vectores 53
Fig. 4.11 Componentes de A ao longo de B e vice-versa.
−→i ·−→i = 1−→j ·−→j = 1−→k ·−→k = 1
(4.50)
Quando pelo contrario, os vectores unitarios sao perpendiculares, verifica-se:
−→i ·−→j =
−→j ·−→i = 0
−→i ·−→k =−→k ·−→i = 0
−→j ·−→k =−→k ·−→j = 0.
(4.51)
- Propriedade distributiva
(−→C +−→D ) ·−→E =
−→C ·−→E +
−→D ·−→E . (4.52)
Exemplo 7: Calcule o produto interno (ou escalar)−→A ·−→B .
Temos
−→A ·−→B = (Ax
−→i +Ay
−→j +Az
−→k ) · (Bx
−→i +By
−→j +Bz
−→k ) (4.53)
Continuando a operacao, obtem-se
−→A ·−→B = AxBx +AyBy +AzBz. (4.54)
Obtemos finalmente

54 4 Vectores
−→A ·−→B = AxBx +AyBy +AzBz. (4.55)
- Qual e o significado do produto interno−→j ·−→A ?
−→j ·−→A =
−→j · [Ax
−→i +Ay
−→j +Az
−→k ] = Ay (4.56)
Portanto, o produto interno−→j · −→A representa a componente do vector
−→A no eixo
Oy. O produto interno sera muito utilizado no calculo do trabalho efectuado poruma forca
−→F sobre um corpo deslocado da distancia
−→d :
W =−→F ·−→d . (4.57)
Exemplo 8: Sejam os dois vectores−→A = 3
−→i +7
−→k e−→B =−−→i +2
−→j +−→k .
- Calcule o produto interno−→A ·−→B e o angulo θ que fazem os dois vectores.
Tem-se
Ax = 3;Bx =−1Ay = 0;By =2
Az = 7;Bz =1
Logo,
(−→A ·−→B ) = AxBx +AyBy +AzBz
= (3)(−1)+(0)(2)+(7)(1) = +4
cosθ =(−→A ·−→B )
AB=
4√32 +02 +72
√(−1)2 +22 +12
=4√
58√
6
donde se segue que o angulo formado pelos dois vectores−→A e−→B e
⇒ θ = 77.6o.
4.3.2 Produto externo (ou vectorial)
−→C = [
−→A ×−→B ]. (4.58)
C = ABsinφ (4.59)
4.3 Multiplicacao de vectores 55
QuadroNegro 8 - (a) Asinφ e a componente de A perpendicular a−→B ; (b)
ABsinφ e a area do paralelograma.
Fig. 4.12 Regra da mao direita.
Como mostra a Fig. 4.12 o vector−→C esta orientado perpendicularmente ao plano
formado por−→A e−→B .−→C e perpendicular a
−→A e−→B .

56 4 Vectores
−→A ×−→B =−−→B ×−→A . (4.60)
No caso dos vectores serem paralelos, entao
−→A ×−→A = AAsin00−→n =
−→0 , (4.61)
sendo −→n o vector unitario perpendicular ao plano de−→A e−→B . Concluımos que o
produto externo constitui um teste util para verificar se dois vectores sao paralelos.Os vectores unitarios verificam as seguintes relacoes:
−→i ×−→i = 0−→j ×−→j = 0−→k ×−→k = 0.
(4.62)
−→i ×−→j =−−→j ×−→i =
−→k
−→k ×−→i =−−→i ×
−→k =−→j
−→j ×−→k =−
−→k ×−→j =
−→i
(4.63)
−→A ×−→B = (Ax
−→i +Ay
−→j +Az
−→k )× (Bx
−→i +By
−→j +Bz
−→k ) (4.64)
−→A ×−→B = (AyBz−AzBy)
−→i +(AzBx−AxBz)
−→j +(AxBy−AyBx)
−→k . (4.65)
Podemos representar o produto externo em notacao matricial:
−→A ×−→B =
−→i −→j −→kAx Ay AzBx By Bz
(4.66)
Exemplo 9: Calcule os determinantes:a) Ordem 2 [
a1 a2b1 b2
]= a1b2−a2b1 (4.67)
[3 −24 5
]= 3(5)−4(−2) = 23 (4.68)
b) Ordem 3a1 a2 a3b1 b2 b3c1 c2 c3
= a1
[b2 b3c2 c3
]−a2
[b1 b3c1 c3
]+a3
[b1 b2c1 c2
](4.69)
Exemplo 10: 3 2 −14 3 3−2 7 1
= 3[
3 37 1
]−2[
4 3−2 1
]+(−1)
[4 3−2 7
]= (4.70)

4.3 Multiplicacao de vectores 57
3[3(1)−7(3)]−2[4(1)−(−2)(3)]+(−1)[4(7)−(−2)(3)]=−54−20−34=−108(4.71)
Exemplo 11: Outros exemplos de aplicacao serao dados mais tarde, entre osquais se incluem o momento angular
−→L = [−→r ×−→p ], o momento da forca −→τ =
[−→r ×−→F ].Exemplo 12: Sejam
−→A = 3
−→i +7
−→j −−→k (4.72)
e −→B =
−→i −−→j . (4.73)
Calcule−→C = [
−→A ×−→B ].
−→C = [
−→A ×−→B ] =
−→i −→j −→k+3 +7 −1+1 −1 0
= (4.74)
−→C =−→i [7(0)−(−1)(−1)]−−→j [3(0)−(1)(−1)]+
−→k [3(−1)−(1)(7)]=−−→i −−→j −10
−→k
(4.75)
−→C ·−→A = (−−→i −−→j −10
−→k ) · (3−→i +7
−→j −−→k ) =−3−7+10 = 0, (4.76)
−→C ·−→B = (−−→i −−→j −10
−→k ) · (−→i −−→j ) =−1+1 = 0. (4.77)
−→C e perpendicular a
−→A e−→B .
Em modulo:C = ABsinθ (4.78)
ou seja
sinθ =CAB
=
√(−1)2 +(−1)2 +(−10)2√
32 +72 +(−1)2√
12 +(−1)2=
√102√
59√
2=
√102118
, (4.79)
donde resulta
θ = arcsin
√102118
= 70.80. (4.80)
Exemplo 13: Lei dos cosenosTrace um triangulo com os vectores. Tem-se
−→C =
−→A −−→B (4.81)
donde
−→C ·−→C = (
−→A −−→B ) · (−→A −−→B ) =
−→A ·−→A −2
−→A ·−→B +
−→B ·−→B , (4.82)

58 4 Vectores
ou sejaC2 = A2−2ABcosθ +B2. (4.83)
Exemplo 14: Lei dos senos A lei dos senos 4 estabelece uma relacao entre oslados e os angulos de qualquer triangulo (Fig. 4.13):
asinA
=b
sinB=
csinC
= 2R. (4.84)
Fig. 4.13 Lei dos senos.
4.4 Estatica
E util comecarmos por expor os princıpios basicos do funcionamento das maquinas,antes de comecarmos a exposicao da Mecanica Newtoniana. O veleiro, o moinho
4 O gigantesco tratato de Astronomia intitulado “Almagesto” de Claudius Ptolemaeus (circa 100-170 D.C.) foi a primeira obra sobre trigonometria que chegou a Europa. No primeiro livro (numcompendio de 13) Ptolomeu constroi uma tabua de cordas na qual o comprimento da corda numcırculo e dado como uma funcao do angulo central que a subtende, isto e, c = 2Rsin(C/2). Naobra “Aryabhatiya”, escrita por Aryabhata I (c. 475-550 D.C.) este autor usou a palavra ardha-jyapara meia corda. Depois reduziu a expressao para jya ou jyba e, mais tarde, os Arabes traduziramesta grande obra classica da matematica da India, sem explicar qual o seu sentido. Na subsequentetraducao para o Latim, jyba foi traduzida como sinus, palavra latina que significa baıa, curva. Aabreviatura sin foi introduzida em 1624 por Edmund Gunter.

4.4 Estatica 59
de vento e a roda de agua eram de facto maquinas inventadas para tornar o esforcohumano mais conveniente. Contudo, nesse tempo, a maquina nao era algo que tra-balhava em lugar do homem, tal como acontece hoje com a maquina electrica. Oque se procurava era um dispositivo que proporcionasse vantagem mecanica, umamaquina que poupasse tempo ao homem. Os princıpios sobre os quais se funda aciencia da estatica foram estabelecidos por Arquimedes e Stevenius.
O primeiro princıpio deve-se a Arquimedes (287-212 A.C.) 5
Todos nos sabemos por experiencia propria que uma pequena forca aplicada numextremo de uma alavanca, longe do ponto de apoio (ou fulcro) pode ultrapassar emmagnitude uma forca muito maior aplicada perto do fulcro.
O tratado de Arquimedes no qual trata desta materia mostra que Arquimedesfala de pesos (e nao forcas) e o seu raciocınio trabalha com Axiomas, Reducao aoabsurdo e a teoria geometrica das proporcoes.
PRINCIPIO DA ALAVANCA: Seja AB uma barra suportada em C, e sejam P e Qdois pesos suspensos nos pontos A e B. No equilıbrio verifica-se:
P×AC = Q×BC. (4.85)
Se P for um peso e Q for um peso que se contrapoe, entao chama-se a P de forcaresistente e a Q forca potente, enquanto que AC e o braco resistente e BC o bracopotente.
A vantagem mecanica da alavanca e
PesoPotencia
=comprimento-do-braco-potente
comprimento-do-braco-resistente. (4.86)
Exemplo 14: Alavanca simples: A maior parte dos membros do corpo sao destaclasse. O ante-braco move-se em torno do cotovelo sendo este o fulcro. A potenciae aplicada pelos musculos bıceps (Vd. Fig. 4.14-(a)). A vantagem mecanica e muitopequena e os musculos devem ser muito fortes.
Exemplo 15: A alavanca simples funciona com base num fulcro fixo e so podeelevar um peso ate a altura acima do flucro e igual ao comprimento do braco menor.Esta restricao e ultrapassada com o segundo dos poderes mecanicos, a roda e o eixo(Vd. Fig. 4.14-(b)). Em qualquer instante o diametro ACB pode ser visto como umaalavanca com o flucro em A. Logo, P×AB =W ×AC. A forca potente e aplicada naroda maior. A condicao de equilıbrio e a da alavanca, Eq. 10.3.
Fig. 4.14 (a) Alavanca simples na maquina do corpo humano; (b) cabrestante, aparelho muitousado em navios (nautica); (c) Polia.
5 Nascido em Siracusa, completou os estudos na cidade de Alexandria sob a orientacao de Cononna Escola Real dos Ptolomeus (uma dinastia de faraos que governou o Egipto desde a morte deAlexandre O Grande, ate ao ano 30 a.C.) Euclides estudou aqui meio seculo antes. Sao conhecidasas historias da coroa do rei Hiero, os espelhos ustorios (que pegam fogo) com os quais destruiu asembarcacoes romanas, e o seu assassinato no final do cerco a Siracusa, e apesar das ordens estritasdo general Marcellus para que a sua vida fosse poupada.

60 4 Vectores
Exemplo 16: Determine em que ponto de uma barra, de peso desprezavel, devecolocar um corpo de modo que o peso suportado por uma crianca numa das suas ex-tremidades seja a terca parte daquele que suporta um homem na outra extremidade.
Seja W o peso suportado pela crianca e 3W o peso suportado pelo homem. Se-jam x1 e x2 respectivamente o braco potente e o braco resistente. Estando a barraem equilıbrio a soma dos momentos deve ser nula, ou por outra via, aplicando oprincıpio da alavanca, Wx1 = 3Wx2, isto e, x1 = 3x2 e o peso deve ser colocado auma distancia mınima de 3/4 do comprimento da barra.
Exemplo 17: A polia e uma roda com uma corda enrolada e suportada numaextremidade. A forca potente e aplicada na outra extremidade. O peso e penduradono eixo da polia, como mostra a Fig. 4.14-(c). Em qualquer instante o diametro ACBpode ser visto como uma alavanca com fulcro em A. Donde
P×AB =W ×ACPW = AC
AB = 12 .
(4.87)
Se tivermos em conta o peso da polia w, devemos antes escrever
P =W +w
2(4.88)
Claramente os sistemas anteriores so nos permite duplicar a forca. Vamos ver emseuida como podemos amplificar forcas.
Exemplo 18: Sistema de Arquimedes (Fig. 4.15) combinando varias poliaspermite-nos aumentar a vantagem mecanica ate ao limite que desejarmos. Comoa tensao de cada corda e dupla do valor da corda colocada acima, o peso e o dobroda tensao da ultima corda. Se houver n polias moveis, tem-se
W = 2n×PPW = 1
2n(4.89)
Desprezamos aqui o peso das polias.
Fig. 4.15 (a) - sistema de Arquimedes; (b) - Polipasto com n roldanas.
Exemplo 19: Polipasto Ha dois blocos, cada um dos quais com varias polias nomesmo eixo. A corda esta amarrada a um dos blocos e enrolada em torno da todasas polias como mostra a Fig. 4.15-(b). A tensao da corda e a mesma em todo o ladoe o peso e suportado por todas as tensoes de modo que
PW
=1n. (4.90)
Em todos estes casos ignoramos o efeito do atrito que e com frequencia consider-avel. Sem atrito, o trabalho que a forca aplicada P deve efectuar para elevar o pesoR na distancia s′ deve ser igual ao trabalho efectuado por P ao deslocar o seu ponto

4.4 Estatica 61
de aplicacao da distancia s. Teremos:
P× s = R× s′. (4.91)
Estes aparelhos sao muito usados em construcao e nautica.Exemplo 20: No manual de voo de uma aeronave vem o diagrama apresentado
na Fig. 4.16. Coloca-se o aviao na horizontal e debaixo de cada roda coloca-se umabalanca. Mede-se o peso L e R na roda direita e esquerda traseira e N e o pesomedido na roda dianteira. O peso total do aviao tem o ponto de aplicacao em C.G.As distancias em relacao ao ponto de referencia arbitrariamente escolhido estaoapresentados na figura. Determine a posicao XCG.
Se estabelecermos que o momento angular total em torno de um ponto no eixode referencia e nulo, obtemos
WXCG = (2+b)(L+R)+N(2+b−a)XCG = 2+b− Na
W(4.92)
Acresce referir que as unidade de comprimento no caso da figura vem em m e opeso em kg.
Fig. 4.16 Procedimento de pesagem de uma aeronave.
4.4.1 Stevinus de Bruges
Simon Stevin de Bruges (1548-1620), cerca de dois milenios depois de Arquimedesestabeleceu o princıpio do plano inclinado. A sua contribuicao e considerada comouma das mais importantes para o desenvolvimento da Mecanica. A sua imaginacaofertil e talento para questoes praticas levou-o a construir maquinas para elevacao dasembarcacoes dos pescadores holandeses; a arte das fortificacoes; e a melhor formade gestao de uma estrebaria...a pedido do Prıncipe de Orange, Maurice de Nassau.
O problema estudado por Stevinus foi o seguinte: imagine um corpo em repousonum plano horizontal; ele nao requer nenhuma forca para se manter assim. Emseguida, prenda-se o corpo a uma corda e inclinemos o plano ate que ele fique navertical. A tensao do fio iguala o peso do corpo. Em qualquer posicao intermediariaa tensao da corda tera um valor que fica entre o peso do corpo e zero. A questaoque se colocou Stevinus foi: qual a relacao entre a tensao e o peso para qualquerinclinacao do plano?
Fig. 4.17 A solucao de Stevinus.

62 4 Vectores
A Fig. 4.17 mostra a solucao avancada por Stevinus. Seja um triangulo com oplano perpendicular ao horizonte e com a sua base paralelo a ele. De cada lado dotriangulo coloque-se uma serie de esferas de igual massa, constituindo uma cadeiainfinita. Stevinus mostrou que a forca necessaria P aplicada sobre um dos lados dotriangulo para suportar o corpo em repouso sobre o lado oposto do plano inclinadodeve estar na seguinte proporcao:
PW
=altura−do− plano
comprimento−do− plano. (4.93)
Nesta expressao hoje sabemos que esta implıcita a conservacao da energia mecanica,na forma W = ∆U . Ele chegou a este resultado pela experimentacao e pelo conhec-imento instintivo. Sabemos de antemao que a cadeia de esferas nao se pode mover,nunca vimos nada semelhante na nossa experiencia de vida, podemos dize-lo atepor instinto. Foi por esta via do conhecimento instintivo que Stevinus comecou assuas investigacoes e construiu as bases da mecanica.
Fig. 4.18 Cubo de lado a actuado pela forca P.
Exemplo 21: Um cubo de lado a e actuado por uma forca−→P , tal como mostra a
Fig. 4.19. Determine o momento de−→F :
a) em torno de A,−→MA;
b) em torno do lado AB,−→MAB;
c) em torno da diagonal AG do cubo,−→MAG.
Solucao do Problema.a) Escolheu-se o sistema de eixos, tal como ilustra a Fig. 4.19. O vector
−→P e
representado em coordenadas Cartesianas e o vector −→r F/A =−→AF com origem no
ponto A e termino no ponto de aplicacao F de−→P . Deste modo tem-se
−→r = a−→i −a
−→j = a(
−→i −−→j ) (4.94)
−→P =
P√2−→j − P√
2−→k =
P√2(−→j −−→k ) (4.95)
O momento do vector−→P em torno de A e
−→MA =−→r F/A×
−→P = a(
−→i −−→j )× P√
2(−→j −−→k ). (4.96)
b) O momento em torno do lado AB e obtido fazendo a projecao de−→MAB no eixo
Ox:MAB =
−→i ·−→MA =
−→i · aP√
2(−→i +−→j +−→k ) =
aP√2. (4.97)

4.4 Estatica 63
Fig. 4.19 Determinacao do momento de−→P .
c) A partir do momento que temos o momento de−→P relativo ao ponto A, o
momento de−→P relativo a diagonal AG e obtido projectando
−→MA sobre AG. Temos
entao primeiro que obter o vector unitario que vai de A para G.
−→λ =
−→AGAG
. (4.98)
Ora, pela Fig. 4.19, concluımos que
−→AG = a
−→i −a
−→j −a
−→k . (4.99)
O seu modulo e AG = a√
12 +12 +12 = a√
3, donde
−→λ =
−→AGAG
=a−→i −a
−→j −a
−→k
a√
3=
1√3(−→i −−→j −
−→k ). (4.100)
Obtem-se em seguida
MAG = (−→λ ·−→MAG) =
1√3(−→i −−→j −
−→k ) · aP√
3(−→i +−→j +−→k ), (4.101)
ou seja
MAG =aP√
3(1−1−1) =− aP√
6. (4.102)


Chapter 5Cinematica a 3 dimensoes
’If people do not revere the Law of Nature, It will ...adversely affect them. If they accept itwith knowledge and reverence, It will accommodate them with balance and harmony.’
- Tao Te Ching, “O Livro do Caminho e sua Virtude”, escrito pelo grande sabiochines Lao Tzu (circa 600 A.C.)
All religions, arts and sciences are branches of the same tree. All these aspirations aredirected toward ennobling man’s life, lifting it from the sphere of mere physical existenceand leading the individual towards freedom.
- Albert Einstein
5.1 Cinematica em 3 dimensoes
No Cap. 3 fizemos a exposicao das bases do calculo vectorial fundamentais paraa resolucao dos problemas de Mecanica. Em seguida generalizamos a 3 dimensoeso movimento unidimensional desenvolvido nos capıtulos anteriores.
Em 3-dim o vector posicao da partıcula ideal num referencial cartesiano e dadopela expressao:
−→r (t) = x(t)−→i + y(t)
−→j + z(t)
−→k . (5.1)
5.1.1 Velocidade media
Considere uma partıcula ideal em movimento num plano dirigindo-se de P paraQ. O vector posicao em P e −→r (t) e o vector deslocamento e dado por ∆
−→r :
65

66 5 Cinematica a 3 dimensoes
∆−→r = ∆x
−→i +∆y
−→j . (5.2)
A razao entre o vector deslocamento e o intervalo de tempo ∆ t = t2− t1 que decorreentre as duas posicoes P e Q e o vector velocidade media :
−→v =
∆−→r
∆ t=
∆x∆ t−→i +
∆y∆ t−→j +
∆z∆ t−→k , (5.3)
O vector velocidade media tem a direccao e o sentido de ∆−→r , e tem modulo ∆r/∆ t
(cf. Fig. 5.1).
Fig. 5.1 (a) - Vector posicao no espaco cartesiano a tres dimensoes; (b) - Vector deslocamento.
Podemos igualmente escrever:
−→v = vx
−→i + vy
−→j + vz
−→k . (5.4)
A velocidade instantanea, v(t), no ponto P e definida em modulo, direccao esentido como o limite da velocidade media ∆
−→r /∆ t quando ∆ t→ 0, ou seja:
−→v = lim∆ t→0
∆−→r
∆ t=
d−→rdt
. (5.5)
A sua direccao e sentido e o da tangente a trajectoria no ponto P. E igual a taxa devariacao temporal do vector deslocamento:
−→v =ddt[x−→i + y
−→j + z
−→k ] (5.6)
−→v =dxdt−→i +
dydt−→j +
dzdt−→k , (5.7)
−→v = vx−→i + vy
−→j + vz
−→k . (5.8)
O modulo do vector velocidade e dado pela expressao:
| −→v |=√
v2x + v2
y + v2z (5.9)
sendo a direccao definida pela equacao:
tanθ =vy
vx. (5.10)

5.1 Cinematica em 3 dimensoes 67
5.1.2 Rapidez
A rapidez e dada pela expressao:
s =| d−→rdt|=√
v2x + v2
y + v2z . (5.11)
Repare que a rapidez instantanea tem o modulo do vector velocidade (enquanto quea velocidade instantanea tem, alem desta propriedade, direccao e sentido).
rapidez−media =distancia− percorrida
tempo. (5.12)
5.1.3 Aceleracao
A aceleracao media e a aceleracao instantanea sao ambas obtidas por umageneralizacao imediata do movimento unidimensional.−→v 1 e −→v 2 sao os vectores velocidade instantanea nos pontos P e Q da trajectoria
curva. Tem modulo e direccao diferentes. A aceleracao media da partıcula quandoela move-se de P para Q e,
−→a , e e definida pela razao entre a variacao do vector
velocidade instantanea ∆−→v e o intervalo de tempo ∆ t:
QuadroNegro 1 - Aceleracao media.
Portanto, temos sempre−→a 6= 0 se a velocidade muda de direccao, ou se a veloci-
dade muda em modulo.

68 5 Cinematica a 3 dimensoes
A aceleracao instantanea, −→a , no ponto P define-se em modulo, direccao e sen-tido como o limite para o qual tende a aceleracao media quando o ponto Q aproxima-se do ponto P e ∆v e ∆ t ambos aproximam-se de zero.
Fig. 5.2 Aceleracao instantanea e suas componentes a duas dimensoes.
Portanto, tem-se aqui:
−→a = lim∆ t→0
∆−→v
∆ t = d−→vdt = d2−→r
dt2
= ax−→i +ay
−→j +az
−→k
ax =dvxdt = d2x
dt2
ay =dvydt = d2y
dt2
az =dvzdt = d2z
dt2
(5.13)
Pode-se verificar o seguinte:
• e igual a taxa de variacao temporal da velocidade;• −→a 6= 0 se o modulo da velocidade varia, ou se a direccao muda;• Nao tem necessariamente a mesma direccao que o vector velocidade;• O vector aceleracao fica no lado concavo da trajectoria curva.
Exemplo 1: As coordenadas de um ponto material movendo-se no plano XY saodadas por:
x = 1+2t2(m)y = 2t + t3(m).
(5.14)
Determine a posicao da partıcula, e a sua velocidade e aceleracao no instante t = 2s.
QuadroNegro 2 - Problema.

5.1 Cinematica em 3 dimensoes 69
5.1.4 Aceleracao: componentes a⊥ e a‖
A representacao da aceleracao de uma partıcula movendo-se ao longo de uma curvaem termos das componentes a⊥ e a‖ e muito util porque essas componentes repre-sentam um sistema de coordenadas rectangulares.
• −→a ⊥ e normal a trajectoria e esta associada a mudanca de direccao do movimento;• a‖ e paralela a trajectoria e esta associada a variacao do modulo de −→v .
Existem 2 casos a considerar:(a) - −→a paralelo a −→v : Uma variacao no vector velocidade −→v 1 durante o inter-
valo de tempo ∆ t e um vector ∆−→v com a mesma direccao e sentido que −→a e −→v 1.
A velocidade −→v 2 atingida pelo movel no final do intervalo de tempo ∆ t e dadapor −→v 2 = −→v 1 +∆
−→v , e tem a mesma direccao que −→v 1, mas modulo ligeiramentesuperior.
(b) - −→a perpendicular a −→v : No intervalo de tempo ∆ t a variacao ∆−→v e perpen-
dicular a −→v 1. Temos −→v 2 =−→v 1 +∆
−→v , mas −→v 1 e −→v 2 diferem na direccao. Quando∆ t→ 0, ∆
−→v e perpendicular a −→v 1 e −→v 2, mas os modulos de −→v 1 e −→v 2 sao iguais.
QuadroNegro 3
Repare que a partir da aceleracao podemos obter o incremento infinitesimal davelocidade:
−→a =d−→vdt⇒ d−→v =−→a dt. (5.15)
Ou seja, a variacao da velocidade tem a mesma direccao (e sentido) que o vectoraceleracao.
Em particular, pode-se verificar (usando −→a ⊥ e −→a ‖) que:
• −→a ·−→v > 0 - a velocidade aumenta;• −→a ·−→v < 0 - a velocidade diminui.

70 5 Cinematica a 3 dimensoes
• −→a · −→v = 0 - o modulo da velocidade permanece constante, mas a velocidademuda de direccao⇒ movimento circular.
5.1.5 Movimento com aceleracao constante
A aceleracao media e dada por:
−→a =
∆−→v
∆ t. (5.16)
Se a velocidade inicial e −→v 0, entao apos o intervalo de tempo ∆ t = t sera:
−→v =−→v 0 +−→a t, (5.17)
quando a aceleracao e constante.As componentes em x, y e z sao:
vx = vox +axtvy = voy +aytvz = voz +azt
(5.18)
Se aplicarmos os mesmos argumentos que usamos no caso do movimento unidi-mansional, pode-se mostrar que o vector posicao e dado pela expressao:
−→r =−→r o +−→v ot +
12−→a t2. (5.19)
As suas componentes sao:
x(t) = xo + voxt +12
axt2 (5.20)
y(t) = yo + voyt +12
ayt2 (5.21)
z(t) = zo + vozt +12
azt2 (5.22)
Repare que nas Eqs. 17.172-Eq. 17.173 e Eqs. 5.20- 5.22 as varias componentes domovimento sao independentes umas das outras. Embora o tempo seja comum emtodas elas, vx e so afectado por ax; x e afectado pela velocidade inicial vox e ax, e poraı adiante.
Fig. 5.3 Graficos de y vs. x.

5.1 Cinematica em 3 dimensoes 71
5.1.6 Movimento de projecteis
Comecamos aqui o estudo do movimento dos corpos aos quais se comunica umavelocidade inicial a partir de uma posicao inicial e que seguem uma trajectoria de-terminada pelo efeito do campo gravitacional e pela resistencia do ar.
O modelo ideal e o seguinte:
• As trajectorias sao de curto alcance de modo que −→g e (praticamente) constanteem modulo e direccao;
• Despreza-se a resistencia do ar;• Despreza-se o efeito da rotacao da Terra;• O movimento e de aceleracao constante.
Fig. 5.4 Trajectoria balıstica.
Para descrever este movimento pode assumir que (cf. Fig. 5.4):
• o movimento realiza-se no plano XZ;• O eixo OZ e dirigido verticalmente;• O eixo OX e dirigido no sentido da componente horizontal da velocidade;
Ou seja:
ax = 0ay = 0
az =−g =−9.80m.s−2 (aceleracao-oposta-a+Oz)voy = 0.
(5.23)
Equacoes do movimento:
x(t) = xo + voxt vx(t) = voxy(t) = 0 vy(t) = 0
z(t) = zo + vozt− 12 gt2 vz(t) = voz−gt
(5.24)
Repare que os movimentos estao desacoplados, o movimento ao longo de umdado eixo e independente do movimento ao longo dos outros dois. Essa experienciapode ser feita por vos. Basta atirar simultaneamente duas moedas (a sua massatambem e indiferente, pois ambas caem com a mesma aceleracao) do alto de umamesa, uma delas com velocidade horizontal e a outra em queda livre na vertical:ambas atingem o solo no mesmo instante.
Portanto, x(t), y(t) e z(t) dao uma descricao completa da trajectoria da partıculaem funcao do tempo.
Qual e curva matematica descrita pela trajectoria balıstica?Sabemos que
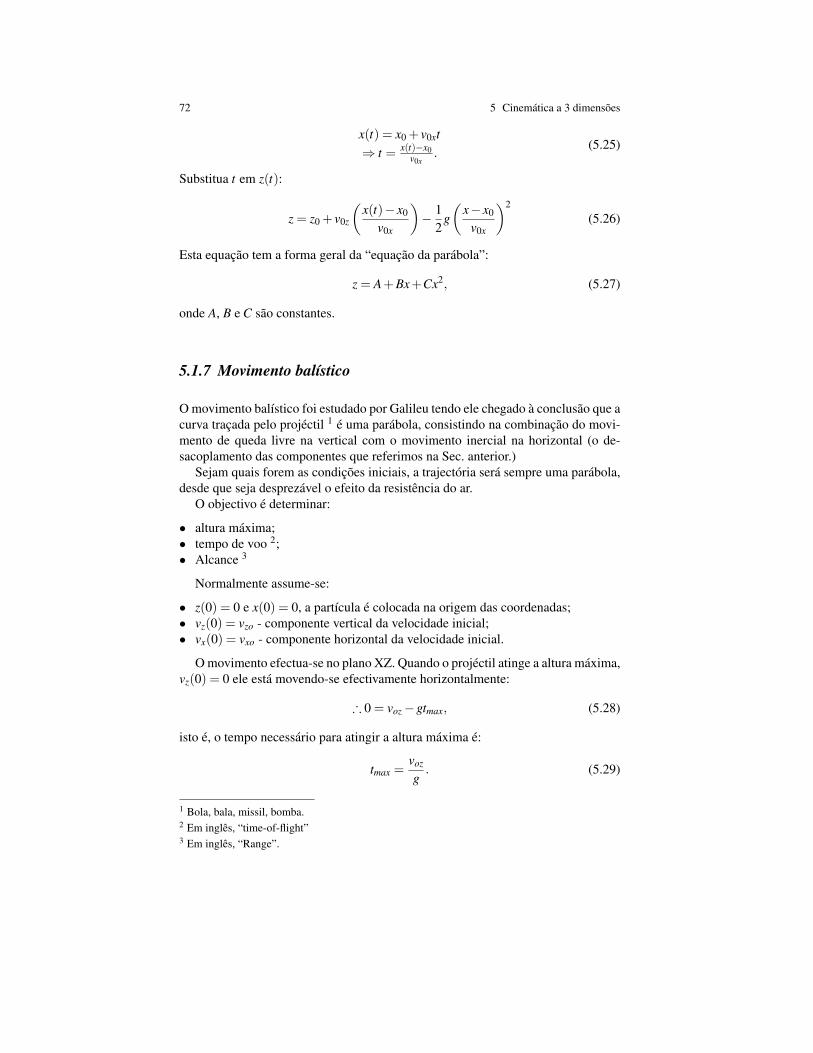
72 5 Cinematica a 3 dimensoes
x(t) = x0 + v0xt⇒ t = x(t)−x0
v0x.
(5.25)
Substitua t em z(t):
z = z0 + v0z
(x(t)− x0
v0x
)− 1
2g(
x− x0
v0x
)2
(5.26)
Esta equacao tem a forma geral da “equacao da parabola”:
z = A+Bx+Cx2, (5.27)
onde A, B e C sao constantes.
5.1.7 Movimento balıstico
O movimento balıstico foi estudado por Galileu tendo ele chegado a conclusao que acurva tracada pelo projectil 1 e uma parabola, consistindo na combinacao do movi-mento de queda livre na vertical com o movimento inercial na horizontal (o de-sacoplamento das componentes que referimos na Sec. anterior.)
Sejam quais forem as condicoes iniciais, a trajectoria sera sempre uma parabola,desde que seja desprezavel o efeito da resistencia do ar.
O objectivo e determinar:
• altura maxima;• tempo de voo 2;• Alcance 3
Normalmente assume-se:
• z(0) = 0 e x(0) = 0, a partıcula e colocada na origem das coordenadas;• vz(0) = vzo - componente vertical da velocidade inicial;• vx(0) = vxo - componente horizontal da velocidade inicial.
O movimento efectua-se no plano XZ. Quando o projectil atinge a altura maxima,vz(0) = 0 ele esta movendo-se efectivamente horizontalmente:
∴ 0 = voz−gtmax, (5.28)
isto e, o tempo necessario para atingir a altura maxima e:
tmax =voz
g. (5.29)
1 Bola, bala, missil, bomba.2 Em ingles, “time-of-flight”3 Em ingles, “Range”.

5.1 Cinematica em 3 dimensoes 73
QuadroNegro 4 Altura maxima e alcance do projectil.
Qual e a velocidade, v do projectil em qualquer posicao da sua trajectoria?A velocidade instantanea e:
−→v (t) = vx(t)−→i + vz(t)
−→k (5.30)
o modulo e:| −→v |=
√v2
x + v2z (5.31)
e a direccao e sentido sao dados por
tanθ =vz(t)vx(t)
. (5.32)
Fig. 5.5 Trajectoria de um missil balıstico intercontinental.
5.1.7.1 Velocidade a altura maxima

74 5 Cinematica a 3 dimensoes
Fig. 5.6 Esquema do foguetao V2 construıdo na Alemanha Nazi, na base de Peenemunde na costaBaltica. Werner Von Braun era o cientista-chefe deste projecto que aterrorizou os bitanicos durantea Segunda Guerra Mundial. Em 1945, os cientistas mais famosos especialistas em foguetoes foramacolhidos pelos americanos sob a capa da operacao secreta “Paperclip”. Wernher von Braun, ci-entista lıder no desenvolvimento de foguetes na Alemanha foi levado para os Estados Unidos etornou-se director do Centro Espacial de Voo Marshall de 1960 a 1970, onde desenvolveu o Pro-grama Apollo que colocou o homem na Lua.
vx(t) = vox (5.33)
vz(t = tmax) = voz−g(voz
g) = 0 (5.34)
No instante em que o projectil atinge a altura maxima a trajectoria e horizontal etemos entao
−→v = vox−→i . (5.35)
5.1.7.2 Velocidade atingida a distancia maxima alcancada
vx(t) = vox (5.36)
vz(t =2voz
g) = voz−g
(2voz
g
)=−voz (5.37)
Concluımos que, em modulo, a velocidade atingida e a mesma com que partiu naorigem, e o angulo feito com a horizontal e θ = −θo, em lugar do angulo descritona origem θ =+θo quando t = 0.
QuadroNegro 5 - Curvas caracterısticas do movimento balıstico.

5.1 Cinematica em 3 dimensoes 75
Exemplo 2: Calcule a altura maxima, o tempo de voo e o alcance atingidos porum projectil lancado com velocidade inicial −→v o e fazendo um angulo inicial θ coma horizontal, com origem em O.
vox = vo cosθ
voz = vo sinθ(5.38)
As equacoes do movimento balıstico sao as seguintes:
x(t) = (vo cosθ)t + xoz(t) = zo +(vo sinθ)t− 1
2 gt2 (5.39)
donde resultam as componentes da velocidade
vx(t) = dxdt = vo cosθ
vz(t) = dzdt = vo sinθ −gt.
(5.40)
Altura maxima:
Zmax =v2
o sin2θ
2g(5.41)
Tempo de voo:
tvoo =2vo sinθ
g= 2tmax. (5.42)
Alcance:
xmax =2v2
o sinθ cosθ
g=
v2o sin2θ
g(5.43)
Atencao: Os resultados apresentados anteriomente podem ser aplicados de ime-diato se o ponto de impacto e de lancamento se encontrarem a mesma altura. Deoutra forma devera reacertar a origem.
A expressao do alcance:
R =v2
o sin2θ
g, (5.44)
e funcao do angulo θ , de modo que podemos procurar o angulo θ que correspondeao alcance maximo.
De imediato nos apercebemos que o valor maximo do alcance e obtido quandosin2θ = 1, ou seja
• 2θ = 90o
• θ = 45o
Podemos chegar a mesma conclusao por meio do calculo das derivadas. Primeiroobtemos o valor extremo:
dxmax
dθ=
v2o
g2cos2θ = 0⇒ θ = 45o, (5.45)
e depois verificamos se corresponde ao maximo:

76 5 Cinematica a 3 dimensoes
d2xmax
dθ 2 < 0. (5.46)
Exemplo 3: Qual e o alcance de uma bala de espingarda calibre 22, supondo quev0 = 330 m/s? Considere θ = 45o. Despreze a resistencia do ar.
xmax =v2
o sin2θ
g=
3302×19.80
= 11.1km. (5.47)
Fig. 5.7 Carregador de municao de algumas espingardas.
Exemplo 4: Repita o mesmo tipo de calculo para uma bola de baseball 4.Suponha que vo ∼ 145 km/h = 40.3 m/s.
xmax =v2
o sin2θ
g=
40.32×19.8
= 165.7m. (5.48)
Exemplo 5: Uma bola e arremessada horizontalmente a 18 m/s de uma colinade 50 m de altura. Calcule o tempo de voo, a velocidade com que atinge o solo, oponto do impacto e o angulo do impacto.
x(t) = vo cosθ t = vot (5.49)
porque θ = 0o.
z(t) = zo + vozt−12
gt2. (5.50)
z(t) = H− 12
gt2 (5.51)
porque voz = 0 e zo = H.No ponto de impacto devemos ter z = 0. Resolvendo a Eq. 17.181, obtemos
T =
√2Hg
=
√2×509.80
= 3.19s. (5.52)
dondex(T ) = 18×3.19 = 57.42 (5.53)
vx(T ) =dxdt
= vo = 18m/s (5.54)
vz(T ) =dzdt
=−gT =−9.80×3.19 =−31.26m/s. (5.55)
4 Um arremessador (“pitcher”) lanca uma bola para o o rebatador (“striker”), que a atinge com umbastao e tenta em seguida correr em torno de um circuito de bases sem ser atingido pela bola pelosdefesas.

5.1 Cinematica em 3 dimensoes 77
tanβ =vz
vx=−31.26
18.0(5.56)
β =−60.1o (5.57)
| −→v |=√
v2x + v2
y =√
182 +31.262 = 36.1m/s (5.58)
5.1.8 Estrategia na resolucao de problemas sobre projecteis
As equacoes gerais do movimento parabolico sao:
x(t) = xo +(vo cosθo)tz(t) = zo +(vo sinθo)t− 1
2 gt2 (5.59)
vx(t) = vo cosθovz(t) = vo sinθo−gt. (5.60)
Exemplo 6: Pretende-se atingir uma maca com uma flecha no mesmo instanteem que ela cai da arvore (Fig. 7.1)
Para onde deve apontar o atirador de modo a atingir a maca?
Fig. 5.8 Como atingir uma maca em queda livre com uma flecha.
A trajectoria da flecha e dada por x f (t), y f (t), donde resulta o vector posicao:
−→r f (t) = x f (t)−→i + z f (t)
−→k . (5.61)
A trajectoria da maca e dada por
−→r m(t) = L−→i + zm(t)
−→k . (5.62)
O impacto da flecha com a maca acontece no instante t = T e para que tal acontecae necessario que
z f (t) = zm(t)x f (t) = xm(t)
(5.63)
As equacoes do movimento da maca sao:
xm(t) = Lzm(t) = H− 1
2 gt2 (5.64)
As equacoes do movimento da flecha sao:
x f (t) = voxtz f (t) = vozt− 1
2 gt2 (5.65)

78 5 Cinematica a 3 dimensoes
No instante t = T devemos terL = voxt∴ T = L
vox
(5.66)
A Eq. 17.190 permite-nos escrever
vozT −12
gT 2 = H− 12
gT 2. (5.67)
isto e, depois de substituir t por T :
H = vozL
vox. (5.68)
Atendendo a quevox = vo cosθ
voz = vo sinθ(5.69)
conclui-se queHL
=sinθ
cosθ= tanθ . (5.70)
Este resultado leva-nos a concluir o seguinte:
• a pontaria e independente de vo, embora vo deva ser suficientemente elevado demodo a atingir o alvo;
• o angulo θ representa o angulo com que o alvo e visto antes de este comecar acair.
5.1.9 Movimento circular uniforme. Coordenadas cartesianas epolares
Considera-se aqui o movimento de uma partıcula movendo-se com rapidez con-stante ao longo do cırculo de raio R. Ja sabemos que
−→a =d−→vdt
, (5.71)
e tambem vimos na Sec. anterior que, se a velocidade varia em modulo ou emdireccao, a partıcula esta acelerada.
Por exemplo, se uma partıcula move-se num cırculo a rapidez s=| −→v |= constante,embora a direccao mude continuamente.
Considere dois instantes de tempo consecutivos muito proximos, ∆ t, no movi-mento de uma partıcula ideal. Tem-se:
| −→v 1 |=| −→v 2 |= v = const, (5.72)
e a diferenca da velocidade e:

5.1 Cinematica em 3 dimensoes 79
∆−→v =−→v 2−−→v 1. (5.73)
Quando ∆ t e muito pequeno, tem-se
| −→v |≈ v∆θ (5.74)
QuadroNegro 6 -Movimento circular uniforme
Portanto,
a =| ∆v |
∆ t∼ v(
∆θ
∆ t). (5.75)
O que significa este racio ∆θ
∆ t ?Repare que no intervalo de tempo ∆ t a partıcula tem o deslocamento v∆ t. Esta
quantidade deve ser igual a R∆θ (com θ em radianos).
∴ R(∆θ) = v∆ t (5.76)
∴
(∆θ
∆ t
)=
vR= ω = const. (5.77)
sendo ω a velocidade angular (em unidades rad/s).
∴ a = v( v
R
)(5.78)

80 5 Cinematica a 3 dimensoes
Esta aceleracao no movimento circular e perpendicular a velocidade e dirigida nosentido da concavidade, isto e, do centro, de modo que
a⊥ =v2
R= ω
2R, (5.79)
em unidades m/s2.Qual e a direccao (e sentido de −→a )?No limite ∆ t→ 0 e claro que tambem ∆θ → 0. Uma figura rapida do movimento
circular e suficiente para nos apercebermo-nos que ∆−→v e perpendicular a −→v , ∴
−→a ⊥−→v , em todo os pontos da curva.Portanto, como o vector velocidade −→v e tangencial a trajectoria conclui-se que
o vector aceleracao e orientado para o centro do cırculo. Esta aceleracao e chamadade aceleracao centrıpeta (“orientada para o centro”).
Podemos exprimir esta aceleracao em termos do perıodo τ do movimento. Se apartıcula percorre uma distancia 2πR no intervalo de tempo τ , entao a sua veloci-dade e:
v =2πR
τ, (5.80)
donde se obtem
a⊥ =4π2R
τ2 . (5.81)
Temos procurado calcular a velocidade e aceleracao a partir do procedimento dascoordenadas. Em seguida iremos obter a aceleracao de um objecto movendo-se aolongo de um arco usando a coordenada de arco s. Emprega-se este metodo quandose conhece previamente a trajectoria da partıcula. A posicao do ponto P fica deter-minada pela coordenada do arco s, isto e, pela distancia a origem de referencia eleitaO. Fica assim tambem estabelecido o sentido positivo da leitura da coordenada s.
QuadroNegro 7 - Procedimento “natural”.

5.1 Cinematica em 3 dimensoes 81
Exemplo 1: Um ponto P move-se ao longo de um arco de circunferencia de raioρ (Vd. Fig. 7.2). A sua velocidade depende da coordenada do arco segundo a leiv =C
√s, onde C e uma constante. Achar o angulo α entre o vector aceleracao e o
vector velocidade.
Fig. 5.9 Um ponto P move-se ao longo de um arco de circunferencia de raio ρ .
SOLUCAO:Note que
tanα =an
at
Determinemos as componentes da aceleracao:
an =v2
ρ= C2s
ρ;at =
dvtdt = dvt
dsdsdt =
C2√
sC√
s = C2
2
donde se obtem:α = arctan
2sρ.
Exemplo 2: Num carrossel os passageiros movem-se num cırculo horizontal deraio R = 5.0 m, completando uma volta ao fim de 40 s. Calcule a⊥.
SOLUCAO:
v =2πR
τ=
2π(5.0)40
= 0.785m/s (5.82)
a⊥ =v2
R=
7.852
5.0= 0.123m/s2 (5.83)
ou seja, em termos de fraccao de “gees”:(a⊥g
)= 1.25gees. (5.84)
Repare que
1. Na queda livre, −→a e constante em modulo e direccao e d−→adt = 0;
2. No movimento circular uniforme,−→a e constante em modulo mas nao em direccaoque esta sempre dirigida para o centro e em contınua mudanca, d−→a
dt 6= 0⇒−→a 6=constante.
Exemplo 3: Velocidade de uma pequena esfera ao longo de um raio de uma rodade bicicleta (Vd. Fig. 18.14(b))
SOLUCAO:Uma esfera move-se ao longo do raio de uma roda de bicicleta com velocidade
constante v. A velocidade angular da roda e θ = ω em rad/s em torno de um eixo

82 5 Cinematica a 3 dimensoes
fixo no espaco. No instante inicial t = 0 a esfera esta na origem e o raio ao longodo qual a esfera move-se esta orientado ao longo de OX. Determine a velocidade daesfera num instante generico t.
a) Em coordenadas polares:O procedimento de calculo que apresentamos a seguir tem um caracter geral
e e de grande importancia na aplicacao das coordenadas polares a problemas demovimentos curvilıneos.
Temos previamente as seguintes relacoes: r = vt, r = v e θ = ω .O vector velocidade e:
−→v =ddt(r−→u r) (5.85)
onde −→u r denota o vector unitario radial, representado na Fig. 18.14(a). O vectorunitario radial, como se depreende da Fig. 18.14(a) e dado pela expressao
−→u r = cosθ−→i + sinθ
−→j . (5.86)
Efectuando a derivada em ordem ao tempo da Eq. 17.210 obtemos
−→v = r−→u r + rd−→u r
dt. (5.87)
Encontramos um termo novo, que e o que se encontra no final da Eq. 17.212. Vamosentao calcula-lo:
ddt−→u r =
−→i
ddt
cosθ +−→j
ddt
sinθ
=−−→i θ sinθ +−→j θ cosθ
= θ(−sinθ−→i + cosθ
−→j )
(5.88)
Repare que os vectores unitarios−→i e−→j permanecem fixos no sistema de coorde-
nadas escolhido. Repare agora que se fizermos roda o vector unitario −→u r de 90o
obtemos o novo vector unitario azimutal −→u θ :
−→u θ =−→i cos
(θ + π
2
)+−→j sin
(θ + π
2
))
=−sinθ−→i + cosθ
−→j
(5.89)
Isto e, obtemosd−→u r
dt= θ−→u θ . (5.90)
Finalmente, obtemos o vector velocidade em coordenadas polares:
−→v = r−→u r + rθ−→u θ . (5.91)
Voltando ao nosso problema, podemos substituir o que ja sabemos:
−→v = v−→u r + vtω−→u θ . (5.92)

5.1 Cinematica em 3 dimensoes 83
b) Em coordenadas cartesianas:Neste caso convem partir da expressao
−→v =ddt(x−→i + y
−→j ) (5.93)
Ou seja−→v =
ddt(r cosθ
−→i + r sinθ
−→j ) (5.94)
Repare que agora os versores−→i e−→j estao fixos no espaco, nao rodam com o tempo
como o fazem −→u r e −→u θ . Temos assim sucessivamente
−→v = r cosθ−→i − rθ sinθ
−→i + r sinθ
−→j + rθ cosθ
−→v =−→i (vr cosθ − vθ sinθ)+
−→j (vr sinθ + vθ cosθ)
(5.95)
onde pusemos vr = r e vθ = rθ = rω .Por este exemplo concluımos ser muito mais facil a resolucao do problema us-
ando coordenadas polares.Exemplo 4: Calcule a expressao da aceleracao em coordenadas polares. Parta da
Eq. 17.210.SOLUCAO:
−→a =ddt−→v
−→a =ddt(r−→u r + rθ
−→u θ ) (5.96)
QuadroNegro 8 - Aceleracao em coordenadas polares (complete o calculoacima iniciado)

84 5 Cinematica a 3 dimensoes
Chegamos finalmente a expressao da aceleracao em coordenadas polares:
−→a = (r− rθ2)−→u r +(rθ +2rθ)−→u θ . (5.97)
• r−→u r - aceleracao linear na direccao radial devido a variacao do modulo da ve-locidade;
• rθ−→u θ - aceleracao linear na direccao tangencial devido a variacao do modulo da
velocidade angular ω (termo de Euler);• −rθ 2−→u r - aceleracao centrıpeta;• 2rθ
−→u θ - aceleracao de Coriolis5 (forca fictıcia que aparece nos referenciais emrotacao)
Fig. 5.10 (a) Movimento circular e em linha recta em coordenadas polares. (b) Uma esfera move-se radialmente ao longo de um raio de roda de bicicleta com velocidade v.
5.2 Movimento circular nao uniforme
Quando o movimento e circular mas porem a rapidez varia, aparece o termo que jadiscutimos a⊥ mas tambem um novo termo que representa uma componente tan-gencial da velocidade:
a‖ = lim∆ t→0
∆v‖∆ t
=dv‖dt
, (5.98)
continuando com a componente normal:
a⊥ =v2
R. (5.99)
O modulo e dado pora =
√a2⊥+a2
‖. (5.100)
E claro que no inıcio do movimento circular a partir do repouso estas duas compo-nentes estao sempre presentes.
A forca centrıfuga e a forca que parece dirigida no sentido contrario ao do centroO.
Imagine que esta no interior de uma viatura em movimento circular e que atirauma maca para fora do carro. Temos duas perspectivas diferentes do mesmo evento:
5 Gaspard-Gustave de Coriolis ou Gustave Coriolis (1792 1843), foi um matematico, engenheiromecanico e cientista frances, tornado famoso pela descoberta do efeito Coriolis. Coriolis foi oprimeiro a cunhar a palavra “trabalho” para o produto da forca pelo deslocamento. Em 1829 Cori-olis publicou o livro “Calcul de l’Effet des Machines” onde expos a mecanica na forma que atornava de compreensiva aplicacao no contexto da engenharia.

5.2 Movimento circular nao uniforme 85
- Referencial do solo.
• o objecto e atirado para fora da viatura• move-se numa linha recta relativo ao solo (ou ao laboratorio)• tudo se passa como se a viatura tivesse uma aceleracao centrıpeta a⊥ que afasta
a viatura do objecto.
- Referencial da viatura
• o objecto e atirado para fora da viatura• aparenta estar animado da aceleracao centrıfuga −−→a ⊥• e evidente entao pela comparacao dos eventos observados nestes dois referen-
ciais diferentes que surgem forcas com caracter fictıcio 6 (ou ainda por vezesdenominadas por pseudo-forcas).
As chamadas forcas fictıcias surgem normalmente em referenciais nao-inerciais(isto e, acelerados), e nestes a descricao da mecanica sofre modificacoes apropri-adas, como veremos a seguir.
6 Isto e, forcas que nao resultam de uma interaccao fısica, que nao resultam da presenca de umcampo de forcas (do tipo, por ex., electromagnetico ou gravıtico).


Chapter 6Relatividade do Movimento
’Be a philosopher; but, admidst all your philosophy, be still a man.’ - (David Hume, 1737)
’It does not matter how slowly you go so long as you do not stop’. - Confucius (571 BC–479 BC)
6.1 Relatividade do movimento. Transformacao de Galileu
O movimento e relativo. Como e notorio no exemplo anterior, a velocidade e aaceleracao dependem do referencial usado no estudo do movimento.
Os trabalhos de Galileu proporcionaram a base teorica para a artilharia. A artil-haria foi usada inicialmente para quebrar a moral dos adversarios numa confrontacaobelica, mas era fundamental saber como atingir o alvo. Galileu compreendeu queuma bala de canhao tem dois movimentos quando e lancada: um movimento para afrente que resulta da explosao e que lhe da um movimento inicial em determinadadirecao; o outro movimento deriva da acao da gravidade que puxa a bala para ocentro da Terra. Galileu compreendeu que se pode decompor um movimento com-plicado numa dada direcao como resultado do movimento em duas outras direcoes.Tambem compreendeu que o corpo se movia numa direcao determinada com ve-locidade constante porque possuia uma propriedade intrınseca e fundamental damateria: a inercia 1.1 Esta propriedade era perfeitamente surpreendente na epoca. Alguns historiadores da Cienciafizeram notar a extrema semelhanca que a Lei da Inercia de Galileu tem com o perıodo inicial doCap. II do Leviathan, escrito por Thomas Hobbes com o fito de compreender o funcionamento dassociedades humanas:
”Que quando uma coisa esta parada, assim permanecera eternamente a menos que algumaoutra coisa a mova, e verdade que ninguem duvida. Mas que, quando uma coisa se encontraem movimento, assim permanecera eternamente a menos que alguma outra coisa a detenha,nao e tao facilmente que se concorda com isso, embora a razao seja a mesma, a de que nadapode modificar-se por si mesmo.”
87

88 6 Relatividade do Movimento
Exemplo 1: Um aviao desloca-se a altitude de 500 m e com a velocidade (oumelhor, rapidez) de 100 km/h. Supondo que se pretende deixar cair um saco postalpara o solo no local B, a que distancia A desse local se deve deixar cair o saco postal?Veja a Fig.
Fig. 6.1 Aviao deixa cair saco postal.
Tem-se sucessivamente:
y = h− 12 gt2
x = vt⇒ t = x2
v2
y = h− gx2
2v2
y = 0 [saco no solo] ⇒ h = gx2
2v2
x = v√
2hg
x = 105
3600
√2x500
10 ≈ 210 m.
(6.1)
QuadroNegro 1 - Movimento do veleiro relativo ao referencial do navio e daTerra.

6.1 Relatividade do movimento. Transformacao de Galileu 89
Referencial da Terra: x,y,z, tReferencial do navio: x′,y′,z′, t ′.O tempo e absoluto no ambito da mecanica Newtoniana: t = t ′.Sejam:−→r - vector posicao do veleiro relativo a Terra.−→r ′ - vector posicao do veleiro relativo ao navio.Iremos assumir que o sistema de coordenadas dos dois referenciais coincide no
instante t = t ′ = 0 e que as coordenadas do navio movem-se com a velocidade−→V
ao longo de−→R . Podemos entao escrever:
−→r =−→r ′+−→R (6.2)
Esta adicao imediata pode ser feita porque fora do contexto relativista (v c) oscomprimentos dos objectos fısicos sao absolutos.
−→R =
−→V t (6.3)
∴−→r =−→r ′+−→V t, (6.4)
ou−→r ′ =−→r −−→V t (6.5)
CASO PARTICULAR:−→V orientado ao longo do eixo OX.
De−→r ′ =−→r −Vt
−→i .
Daqui resulta a Transformacao de Galileu (valida no limite v c, comprimentose tempos absolutos):
x′ = x−Vty′ = yz′ = zt ′ = t
(6.6)
Para obter a velocidade derivamos a Eq. 17.200 em ordem ao tempo:
−→v ′ = d−→r ′
dt ′=
d−→r ′
dt=
ddt(−→r −−→V t) =
d−→rdt−−→V . (6.7)
∴−→v ′ =−→v −−→V , (6.8)
ou entao,∴−→v =−→v ′+−→V (6.9)
Isto significa que a velocidade do veleiro relativa ao navio e a diferenca entre a ve-locidade do veleiro relativo a Terra e a velocidade do navio relativo a Terra. Tambema poderıamos escrever na forma:
−→v ′V N =−→v V T −−→V NT ,
−→v V T =−→v ′V N +−→V NT .
(6.10)

90 6 Relatividade do Movimento
Repare na forma como esta escrita a ultima equacao com os sub-ındices do vectorvelocidade com a seguinte sequencia: V T→ V N+NT.
Em particular, se−→V dirige-se ao longo do eixo Ox, temos: vx = vx−V
vy = vyvz = vz
(6.11)
Podemos calcular a aceleracao que o veleiro aparenta ter em ambos referenciais,bastando calcular a derivada em ordem ao tempo do vector velocidade:
−→a ′ = d−→v ′
dt ′=
d−→v ′
dt=
ddt(−→v −−→V ) (6.12)
Como−→V assume-se constante (estudamos aqui o movimento uniforme), entao
conclui-se que−→a ′ = d−→v
dt=−→a . (6.13)
Isto e, a aceleracao e absoluta relativamente aos referenciais de inercia.No caso geral em que a velocidade entre os dois referenciais nao e constante,
teremos−→a ′ =−→a − d
dt−→V . (6.14)
6.1.1 Velocidade relativa
A velocidade relativa e usada para descrever o movimento de referenciais relativa-mente um ao outro.
Note em particular que para quaisquer dois objectos or referenciais A e B, avelocidade de A relativa a B tem o mesmo modulo mas sentido oposto da velocidadede B relativa a A: −→
V BA =−−→V AB.
Exemplo 2: Uma embarcacao atravessa um rio com uma corrente de velocidadeVrt = 12 km/h, tal como ilustra o problema a Fig. 7.3. A velocidade da embarcacaorelativa ao rio e Ver = 20 km/h. Qual e a orientacao da embarcacao mais apropriadapara que ela atinja a outra margem na transversal?
SOLUCAO:
Fig. 6.2 Movimento relativo da embarcacao ao atravessar um rio.
Temos:

6.1 Relatividade do movimento. Transformacao de Galileu 91
−→V er−velocidade da embarcacao relativa ao rio−→V et −velocidade da embarcacao relativa a Terra−→V rt −velocidade do rio relativamente as margens
(6.15)
Nos queremos que o movimento tenha o sentido do vector−→V et , o angulo θ deve ser
tal que
sinθ =Vrt
Ver=
1220
= 0.60
dondeθ = 36.90.
Exemplo 3: Uma embarcacao desloca-se no sentido 30o Norte-Oeste a 30 m/srelativamente a agua dum rio (Vd. Fig. 7.4). A corrente do rio e dirigida para Sula 5 m/s relativamente a margem. Considere em seguida que um objecto move-secom a velocidade de 6 m/s no sentido 30o SO relativamente a embarcacao. Qual ea velocidade do objecto relativamente a margem do rio?
SOLUCAO:A transformacao de Galileu permite-nos escrever:
−→v ot =−→v oe +
−→v er +−→v rt . (6.16)
Com base nos dados de que dispomos podemos desde logo escrever:
−→v oe = 6[−cos30o−→i − sin30o−→j ] (6.17)
−→v er = 30[−sin30o−→i + cos30o−→j ] (6.18)
−→v rt =−5−→j (6.19)
Fig. 6.3 Movimento relativo de um objecto relativamente as magens de um rio.

92 6 Relatividade do Movimento
6.2 Dinamica - Leis de Newton
A cinematica faz a descricao do movimento. Parte da definicao da posicao, veloci-dade e aceleracao e as suas relacoes e evolucao temporal.
A dinamica interroga-se sobre:
• porque se movem os corpos na forma que conhecemos?• o que causa a aceleracao dos corpos? (veremos que as forcas sao as causas da
aceleracao).
As propriedades da forca e a relacao entre forca e aceleracao sao dadas pelas tresleis de Newton.
A Primeira Lei descreve o estado natural de movimento de um corpo na ausenciade forcas. As outras duas leis tratam do comportamento dos corpos quando sujeitosa forcas.
Foi Galileu que lancou as bases da ciencia mecanica. Investigando a queda doscorpos, perguntou-se: Como caem os corpos? Em particular:
• mostrou que a queda livre dos corpos faz-se com aceleracao constante (e inde-pendente do peso, ou da massa do objecto). Realizou experiencias na Torre dePisa;
• determinou experimentalmente as relacoes dadas pelas expressoes: v = at, x =at2/2;
• designando o peso de um corpo por forca, mostrou que na queda dos corpos aforca pode ser medida pela aceleracao que ela produz nesse corpo.
Newton reuniu as descobertas de Galileu numa formulacao da dinamica a quehoje se designa por “Mecanica Newtoniana”, generalizando a ideia de forca comopossıvel de ser medida pela taxa de variacao do momentum, incluindo assim todasas formas de movimento.
As leis de Newton nao representam uma descricao perfeita do mundo real. Emparticular, ela falha na descricao dos
• Atomos e nucleos atomicos→ Teoria Quantica.• Movimento a altas velocidades, isto e, quando v∼ c→ Teoria da Relatividade.
6.3 Forcas
A nocao de forca e fundamental na fısica classica. Forca e um vector, este indicandoa direccao ao longo da qual e aplicada e a sua magnitude (modulo).
No quotidiano usa-se o conceito de forca para explicar e descrever o acto de“puxar” ou de “empurrar”. Por exemplo, usamos os seguintes instrumentos:
• mola comprimida;• elasticos;• cabos;

6.3 Forcas 93
• cordas;
de modo a exercer forcas nos objectos. Ou entao:
• liquidos;• gases;
para exercer forcas em paredes (ou superfıcies) e gases para criar forcas de fluctuacao(por ex., o balao de ar quente, forca de empuxe de um foguete).
Os exemplos acima referidos representam forcas de contacto porque os objectosestao em contacto directo uns com os outros.
Existe um certo tipo de forcas, forcas de accao a distancia onde este contactodirecto nao existe, tais como o sao as forcas gravitacional e electromagnetica.
6.3.1 Forcas fundamentais na Natureza
Para completar a visao actual que a ciencia tem sobre os tipos de forca, faremos emseguida a descricao mais detalhada das suas propriedades.
Gravitacional - E um tipo de forca que age entre corpos que possuem massa, esempre atractiva, e e a forca de mais fraca magnitude que se conhece na Natureza.Segundo as teorias modernas baseadas na Mecanica Quantica, todas as forcasfundamentais sao transmitidas entre partıculas reais por meio de partıculas virtu-ais que nao podem ser detectadas directamente, mas cuja existencia transitoria epermitida pelo Princıpio da Incerteza de Heisenberg. E possıvel que esta forcaresulte da troca de gravitoes entre os corpos. Poderao os corpos acelerados ra-diar energia? Se tal acontecesse, radiariam ondas gravitacionais.
Electromagnetica - Atraccao ou repulsao consoante a carga electrica. A partıculaque transmite a forca e o fotao. Cargas aceleradas radiam fotoes.
Forca nuclear forte - A forca nuclear age no interior do nucleo atomico entre nu-cleoes (ou entre quarks)
Forca nuclear fraca - E exercida entre partıculas elementares, por exemplo, nadesintegracao beta do nucleao: n→ p+ e−+ν . Esta forca foi observada experi-mentalmente no CERN e predita teoricamente, afectando os leptoes e os quarks 2
e e mediada pelos bosoes W e Z.Quinta forca? A experiencia de Etvos verificou a igualdade da massa gravita-
cional com a massa inercial. Mas e possıvel que exista uma pequenıssimadiferenca entre elas devido a possıvel existencia desta 5a forca. A hipoteticapartıcula mediadora seria uma especie de hiper-fotao. Porem, actualmente naoha certeza sobre a sua existencia.
A estrutura e comportamento do universo pode ser descrito por meio da accaodas primeiras 4 forcas referidas.
2 No estagio actual da teoria de partıculas toda a materia e composta de dois tipos de partıculas:i) leptoes - partıculas parecidas com os electroes com massa e carga electrica e os neutrinos; ii)quarks - compoem os protoes e neutroes e sao basicamente de dois tipos, up e down.

94 6 Relatividade do Movimento
Table 6.1 Forcas fundamentais da natureza e sua magnitude e alcance. Nota: Forca relativa exer-cida entre 2 protoes distantes de 10−15 m.
Tipo Alcance importancia relativa mediadoresForca nuclear forte ∼ 10−15 m 1 mesoes, gluoes
Forca electromagnetica ∞ 10−2 fotaoForca nuclear fraca 10−17 m 10−13 W±, Zo
Forca gravitacional ∞ 10−38 (Nota) gravitao ?
A estas quatro forcas basicas estao associadas quatro formas de energia que po-dem converter-se numas nas outras. Por exemplo, a gravitacao pode converter-seem electricidade (por exemplo, numa central hidroelectrica), ou a interaccao nu-clear forte em electromagnetismo (tal acontece quando no interior do Sol a energianuclear converte-se em energia electromagnetica do calor dos raios solares). Os tra-balhos do premio Nobel da Fısica Abdus Salam, mostraram que essencialmentetodas as forcas fundamentais da natureza sao fundamentalmente de origem electro-magetica !
6.3.2 Primeira Lei de Newton
O princıpio da inercia emerge da necessidade social da epoca em que surgiu, emparticular, do problema elementar da pontaria. Se alguem parado disparar sobre umalvo movel, tera de apontar a frente de um alvo movel directamente perpendicular asua linha de mira de modo a acerta-lo. Se, pelo contrario, alguem em movimento dis-parar contra um alvo imovel, devera apontar a linha de mira para tras. Este fenomenoquer dizer que o projectil conserva o seu movimento lateral, alem do seu movimentoao longo da linha de mira. Este facto apareceu como algo inesperado na epoca 3.
PRIMEIRA LEI DE NEWTON OU PRINCIPIO DA INERCIA: “Um corpo que estejaem movimento ou em repouso, tende a manter o seu estado inicial” 4.
3 Curiosamente, as palavras que Newton usou para enunciar esta lei apresentam grande parecencacom o perıodo inicial do segundo capıtulo do Leviathan, a obra maxima do filosofo materialistaingles Thomas Hobbes: “Que quando uma coisa esta parada, assim permanecera eternamente amenos que alguma outra coisa a mova, e verdade de que ninguem duvida. Mas que, quando umacoisa se encontra em movimento, assim permanecera eternamente a menos que alguma outra coisaa detenha, nao e tao facilmente que se concorda com isso, embora a razao seja a mesma, a de quenada pode modificar-se po si mesma”. O Leviathan aborda a questao do contracto social (acordosobre direitos e deveres entre os diversos membros de uma sociedade) e as origens da criacao deum Estado ideal.4 No Latim original as leis exprimem-se assim: Lex I. Corpus onme perseverare in statu suo qui-escendi vel movendi uniformiter in directum; nisi quatems a viribus impressis cogitur statum illummutare; Lex II. Mutationem motus preportionalem esse vi motrici impressæ, et fieri secundumlineam rectam qua vis illa imprimitur; Lex III. Actioni contrarium semper et æqualemesse reac-tionem; sive corporum duorum actiones in se mutuo semper esse æquales et in partes contrariasdirigi.
6.3 Forcas 95
Isto e, se−→F = 0⇒ −→V = const., o corpo na ausencia de forcas descreve um
movimento tendo a velocidade a mesma direccao e modulo.Na realidade a maioria dos corpos que observamos no quotidiano param quando
abandonados a eles proprios devido as forcas de friccao (do ar, do solo,...).Os corpos no vacuo, os planetas, persistem num estado de movimento uniforme.Um corpo liberto da accao de forcas externas e dito um corpo livre. A primeira
Lei de Newton afirma a inercia da materia 5.
6.3.3 Referenciais
As leis de Newton nao sao validas em todos os referenciais, somente nos designadosreferenciais de inercia.
A Fig. 7.5 mostra um observador sobre uma carruagem em movimento aceler-ado com −→a > 0. No ponto de vista deste observador a bola que esta no solo e sub-metida a uma aceleracao. A bola parece ao observador animada por uma aceleracaoespontanea, mesmo se na realidade nao ha nenhuma forca actuando sobre ela.
Fig. 6.4 Referenciais nao inerciais.
Podemos assim sugerir um teste para verificar se um dado referencial e um ref-erencial de inercia:
• observe um corpo livre (nenhuma forca actua sobre ele);• se ele persistir em repouso ou num estado de movimento uniforme (velocidade
constante) num dado referencial, entao esse referencial e de inercia.
Como e logico, qualquer outro referencial em movimento uniforme de translacaoem relacao a este, tambem e um referencial inercial.
Ja um referencial em movimento acelerado em relacao aquele, nao e um referen-cial de inercia.
A Terra so em primeira aproximacao se pode considerar de inercia. Como temum movimento de rotacao e um referencial acelerado, de onde resulta a aceleracaocentrıpeta cujo valor no Equador e de 0.34 m/s2.
6.3.4 Segunda lei de Newton ou princıpio fundamental damecanica
Esta lei estabelece a relacao entre forca, aceleracao e massa.
5 Embora possamos argumentar que a primeira lei de Newton tem um cunho um tanto ou quantometafısico.

96 6 Relatividade do Movimento
A resultante das foras de agem num corpo e igual ao produto de sua massa pelaaceleracao adquirida.
−→F = m−→a =
d−→pdt
. (6.20)
A ultima forma da equacao e a mais correcta, como veremos no estudo do sistemade massas variaveis.
Em resumo:
• E uma lei fundamental da Natureza, ditando a dinamica dos objectos;• E a definicao exacta de forca;• E valida unicamente em referenciais de inercia.• −→a ∝
−→F e tem o mesmo sentido que a forca.
Unidades: Newton (N)
6.3.5 Definicao de massa
Na teoria da Relatividade Restrita de Einstein ver-se-a que em lugar de se usar amassa em repouso mo, e de maior utilidade usar a quantidade m = mo/
√1− v2/c2.
Sucede que na experiencia quotidiana o efeito da velocidade sobre a massa e pe-queno. Por exemplo, a velocidade de uma nave em torno da Terra corresponde av/c≈ 3×10−5, sendo que m e mo diferem de cerca de uma parte por 1010.
As massas sao obtidas por comparacao com o padrao de massa (1 kg).Procedimento:
• Coloca-se uma forca comum a agir sobre a massa padrao e a massa desconhecida;• sob a accao dessa forca os corpos sao acelerados relativamente um ao outro;• Esta experiencia deve ser realizada num referencial de inercia.
Sejam mS, aS a massa e a aceleracao da massa padrao.Sejam m, a a massa e a aceleracao da massa com valor incognito. Temos
F = maF = mSaS
(6.21)
∴mmS
=aS
a. (6.22)
A massa resulta da resistencia que os corpos oferecem a variacao da sua velocidade.A massa e uma quantidade fısica aditiva, m = m1 +m2.

6.3 Forcas 97
6.3.6 Superposicao de forcas
Se varias forcas−→F 1,−→F 2,−→F 3, ...actuam sobre um corpo simultaneamente, a aceleracao
resultante e a mesma que resultaria da actuacao de uma so forca:
−→F R =
−→F 1 +
−→F 2 +
−→F 3 + ... (6.23)
Num sistema de coordenadas cartesianas (ou rectangulares) (x,y,z) as projeccoesdas equacoes do movimento sobre os eixos dao o sistema de equacoes:
∑Fx = max
∑Fy = may
∑Fz = maz
(6.24)
Projectando sobre a tangente e a normal a trajectoria num ponto dado, obtemos:
Ft = m dvtdt Fn = m v2
ρ. (6.25)
Exemplo 4: Situacao dinamica basica de uma partıcula em movimento numcırculo com aceleracao constante (Vd. Fig. 7.12(a)).
SOLUCAO:A partıcula e acelerada para o centro O pela accao da tensao da corda
−→T . Tem-se,
se o movimento realiza-se sobre uma mesa sem atrito, T = mv2
r , onde r e o raio docırculo. Se a corda romper,a trajectoria nao sera radial, mas descrevera uma rectatangencial a curva, como se mostra na Fig. 7.12(b).
Exemplo 5: Uma viatura move-se com velocidade v sobre uma estrada curva einclinada, fazendo um angulo θ com a horizontal. Suponha que a estrada descreveuma curva de raio r. Supoem-se que a estrada e os pneus nao oferecem atrito aomovimento, mas existe uma reaccao da estrada
−→N .
SOLUCAO:Tem-se:
∑Fn = mv2
r,
onde Fn = N sinθ . Na vertical temos:
Fg = mg = N cosθ ,
donde se obtem:
tanθ =v2
gr
Fig. 6.5 (a) Partıcula em movimento circular presa por um fio; (b) o fio parte-se e a partıcula parteao longo da tangencial a curva no ponto em que se parte o fio...A forca centrifuga e fictıcia!; (c)Viatura numa curva inclinada vista de fronte ou pela traseira.

98 6 Relatividade do Movimento
Exemplo 6: Um pequeno corpo P desliza do vertice de uma esfera lisa de raioR. Determine a velocidade do corpo no momento de separacao da superfıcie daesfera, assim como o angulo θc com que o corpo se ”descola” da superfıcie esferica.Considere que a sua velocidade inicial e muito pequena (ou por outras palavras, queestava em equilıbrio instavel). Repare que e mais comodo usar aqui o referencialmovel (−→n ,
−→t ).SOLUCAO:
QuadroNegro 2 - Projeccoes sobre a tangente e a normal a trajectoria numponto dado
Exemplo 7: Um bloco de massa m = 7/3 kg, e actuado por duas forcas, umahorizontal
−→F 1 de 7 N e outra vertical
−→F 2 de 5 N. Determine a aceleracao do bloco.

6.3 Forcas 99
SOLUCAO:Comece por encontrar a resultante das forcas,
−→F R. Escolha um sistema de coor-
denadas apropriado: −→F 1 = 7
−→i +0
−→j
−→F 2 = 0
−→i +5
−→j
donde resulta −→F R =
−→F 1 +
−→F 2 = 7
−→i +5
−→j
Modulo:FR =
√72 +52 = 8.60N
tanθ =FRy
FRx=
57⇒ θ = 35.5o
−→a =FR
m=
7−→i +5
−→j
7/3= 3−→i +
157−→j .
a =8.607/3
= 3.69m/s2.
Exemplo 8: Um disco plano de massa m = 2 kg desliza sobre um lago geladocom velocidade inicial vo = 5 m/s. Exerce-se sobre o disco uma forca de friccaofr = 4 N oposta ao movimento, como mostra a Fig. 7.6. Qual a distancia percorridapelo disco ate este atingir o repouso?
Fig. 6.6 Um disco desliza sobre um lago gelado com velocidade inicial vo e move-se submetido auma forca de fricao fr .
Solucao: O disco nao tem movimento vertical (a soma das componentes verticaise nula). Escolhemos o eixo Ox ao longo do movimento:
− f−→i = m−→a
−→a =− fm−→i =− 4 N
2 kg−→i =−2
−→i m/s2.
(6.26)
Podemos calcular a distancia percorrida s, usando
v2f − v2
0 = 2as, (6.27)
Ora, v f = 0 quando o disco para, logo
−v20 = 2as⇒ s =−
v20
2a=− 5×5
2× (−2)= 6.25 m. (6.28)


Chapter 7Forcas
Nao ha quem aprenda alguma coisa simplesmente por te-la ouvido, e quem nao se esforcasozinho em certas coisas acaba por conhece-las apenas de modo superficial e pela metade.
- “Coloquios com Goethe”, J. Eckermann
7.0.7 Terceira lei de Newton ou lei da acao e reacao
A lei da acao-reacao, ou terceira lei de Newton, e usada em qualquer manual uni-versitario a fim de obter as leis da conservacao do momento linear e angular. ErnstMach 1 considerou, algo surpreendentemente, a terceira lei como a lei mais impor-tante descoberta por Sir Isaac Newton.
Newton concluiu que as forcas agem sempre par a par e, assim, anulando-seigualmente par a par. Para toda forca aplicada, existe outra de mesmo modulo,mesma direcao e sentido oposto. Para uma dada pressao exercida sobre um ob-jecto, existe uma contra-pressao. Um corpo que puxa ou empurra outro corpo e,de acordo com Newton, exactamente puxado ou empurrado com igual magnitudepelo outro. A experiencia que a fundamenta esta na percepcao intuitiva da conexaoque existe entre pressao e contra-pressao. Com a Terceira Lei, Newton completaa exposicao dos Principia Methematica demonstrando os seus teoremas com rigore introduzindo o calculo diferencial 2. Newton e Leibniz beneficiaram do trabalhopreparatorio desenvolvido por Kepler, Galileu, Descartes, Fermat, Roberval, Cava-lieri, Guldin, Wallis e Barrow.
1 Ernst Mach (1838 1916) foi um fısico e filosofo austrıaco.2 Que ele designou por “metodo das fluxoes”. Assinale-se que Leibniz tambem desenvolveu deforma independente os fundamentos do calculo diferencial.
101

102 7 Forcas
TERCEIRA LEI DE NEWTON: A toda acao ha sempre oposta uma reacao igual,ou, as accoes mutuas de dois corpos um sobre o outro sao sempre iguais e dirigidasa partes opostas 3.
Como se depreende da Fig. 7.1:
−→F AB =−−→F BA. (7.1)
Aparentemente e impossıvel obtermos uma forca unica isolada.Repare que:
• O par de forcas que constituem a acao-igual-reacao, agem sobre diferentes ob-jectos;
• Um corpo e acelerado pelas forcas que agem sobre ele, e nao e afectado pelaforca que ele exerce sobre os outros corpos.
Fig. 7.1 Lei da acao-reacao: as forcas anulam-se aos pares.
Exemplo 1: Uma forca de 2 N e aplicada por um operador no bloco A que esta emcontacto com o bloco B. Identifique o par de forcas acao-reacao (Fig. 7.2). Suponhaque mA = 1 kg e mB = 2 kg. Qual e a aceleracao adquirida pelos blocos? Qual e aforca
−→F AB?
Fig. 7.2 Uma forca de 2 N e aplicada no bloco A que esta em contacto com o bloco B.
Tracemos um sistema de coordenadas orientando o sentido positivo do eixo OXpara a direita, como ilustra a Fig. 7.2:
Temos em modulo:FBA = mBaB. (7.2)
Como se ve pela Fig. 7.2, a forca resultante que age sobre o bloco A e:
F−FAB = mAaA. (7.3)
Repare que, como neste caso as forcas estao todas aplicadas ao longo do eixo Oxnao ha necessidade de escreve-las na forma vectorial.
Como os blocos estao em contacto, temos necessariamente a (condicao de con-strangimento do problema):
∴ aA = aB = a (7.4)
3 Na formulacao original em Latim: “Lex III: Actioni contrariam semper et aequalem esse reac-tionem: sine corporum duorum actiones in se mutuo semper esse aequales et in partes contrariasdirigi.”

7 Forcas 103
Da soma das Eqs. 17.173- 17.174 obtemos
F−FAB +FBA = (mA +mB)a. (7.5)
Mas atendendo que a lei da acao-reacao implica que
| −→F AB |=|−→F BA |, (7.6)
∴ F = (mA +mB)a (7.7)
Tudo se passa como se a forca resultante estivesse actuando sobre a massa total mque e a soma da massa das outras duas, m = mA +mB. A aceleracao adquirida pelosblocos movendo-se solidarios e entao dada por:
a =F
mA +mB=
2N(1+2)kg
=23
m/s2. (7.8)
A forca de contacto e obtida de imediato:
FBA = mBaB = mBa= 2× 2
3 = 43 N.
(7.9)
Concluımos que a forca de contacto nao e igual a forca aplicada!Heron de Alexandria (10 d.C. - 70 d.C.), matematico e engenheiro grego, inven-
tou um mecanismo que provou o efeito mecanico da pressao do ar sobre os corpos.O pequeno engenho e o primeiro motor a vapor documentado na historia, e con-hecido pelo nome de “eolıpila”. Mostra-se esta maquina na Fig. 7.3. E um exemploperfeito da lei da accao e reaccao, assim como e um dos grandes inventos dos chine-ses, o foguete. A Fig. 7.4 mostra um guerreiro chines disparando um foguete contraa horda de mongois 4.
Nas lendas europeias e contada a historia fantastica do barao alemao KarlFriedrich Hieronymus, Freiherr von Munchhausen (1720 1797). Ele teria realizado
4 Os Chineses repeliram os Mongois com uma barragem de foguetes, ou nas suas proprias palavras,de “setas de fogo voador”. Essas setas eram foguetoes a combustıvel solido, constituıdos por umtubo fechado num extremo e aberto no outro e contendo polvora (outro grande invento chines).O tubo era ligado a uma longa vara para estabilizar o movimento (vd. Fig.4). A polvora quandodeflagrada produz fogo, fumo e o gas produzido e expelido com grande velocidade pelo exaustor.A polvora e feita basicamente de 75 % de nitrato de potassio, 12.5 % de carvao em po e 12.5 % deenxofre purificado (in Arte dos Fogos de Artifıcio, Tipografia do Comercio, Lisboa, 1908). A partirda batalha de Kai-Keng, os Mongois produziram os seus proprios foguetes e difundiram-nos naEuropa. Em Inglaterra, Roger Bacon aumentou o alcance dos foguetes. Em Franca, Jean Froissartdescobriu que lancando os foguetes por meio de tubos de lancamento melhorava a precisao dotiro, estava inventada assim a “bazooka”. Em Italia, Joanes de Fontana inventou um torpedo que sedeslocava a superfıcie da agua com o proposito de incendiar os navios inimigos.
Johann Schmidlap, no sec. XVI inventou o foguetao com andares: um foguetao de maior ca-pacidade (primeiro andar) transportava um foguetao mais pequeno (segundo andar). Quando ofoguetao maior extinguia-se, o mais pequeno incendiava-se, atingindo uma maior altitude. Todosos foguetoes a propulsao quımica destinados a alcancar o espaco exterior usam esta simples ideiade Schmidlap.

104 7 Forcas
Fig. 7.3 A maquina a vapor de Hero de Alexandria (10-70 A.C.), matematico e engenheiro. Estesimples motor a vapor tambem e conhecida por “Eolıpila”.
Fig. 7.4 Os chineses inventaram o foguete em 1232 e usaram-nos contra os Mongois.
feitos extraordinarios, tais como voar em bolas de canhao, viajar ate a Lua, e escaparde um pantano simplesmente puxando pelos seus proprios cabelos...
7.1 Forca gravitacional
Na natureza os movimentos conhecidos que determinam os fenomenos limitam-sea atraccoes, repulsoes, rotacoes, projeccoes, vibraccoes e vortices. Os movimentosmais conhecidos sao a atraccao e repulsao, talvez porque tenhamos instrumentosmais adequados para medir estes ultimos. A balanca mede a atraccao exercida pelaTerra sobre os corpos; um galvanometro mede a atraccao exercida por um ımansobre uma corrente electrica; o equilıbrio osmotico, que tem grande importancia namanutencao da vida da celula, consiste na atraccao e repulsao das moleculas.
As vibracoes produzidas numa corda produzem som.Os vortices desempenham um papel muito importante na natureza, pois um sim-
ples sopro produz no ar uma rotacao do fluido-isto e, vortices. Um helicoptero eleva-se no ar porque as sua helices rodam no ar como parafusos...
Sir Isaac Newton mostrou que todos os corpos atraem-se mutuamente com umaforca directamente proporcional as suas massas e inversamente proporcional aoquadrado da distancia entre elas. Porem, acrescentou:
A razao dessas propriedades da gravidade, eu ainda nao as deduzi; nao faco hipoteses 5.
POSTULADO DE NEWTON: Em todo o par de partıculas do universo cada umaexerce sobre a outra uma forca gravitacional de mutua atracao. Esta forca e propor-cional ao produto das massas e inversamente proporcional ao quadrado da distanciaentre elas:
Fg =Gm1m2
r212
, (7.10)
onde G = 6.673×10−11 N m2/kg2 representa a constante da gravitacao universal(Fig. 7.5).
Na proximidade da superfıcie terrestre (de massa mT e raio RT ) uma massa m eactuada pela forca:
Fg = m(
GmT
R2T
)= mg, (7.11)
onde
5 Esta e o celebre ditto de Newton: “Hypothesis non fingo”.

7.1 Forca gravitacional 105
g≡ GmT
R2T
, (7.12)
e a aceleracao da gravidade.
Fig. 7.5 Forca de atraccao gravitacional entre dois corpos de massa m1 e m2 distantes de r12.
A constante da gravitacao pode ser medida experimentalmente com uma balancade Cavendish 6 (Vd. Fig. 7.6).
Fig. 7.6 Seccao vertical da balanca de torsao de Cavendish. As esferas maiores estavam pen-duradas num quadro de modo a poderem rodar aproximando-se das esferas menores.
Naturalmente nao nos e possıvel “pesar” um planeta, mas conhecendo o valorde G podemos determinar a massa de qualquer objecto cosmico. A aceleracao dagravidade g pode ser determinada medindo a queda de objectos. Conhecendo-se G,RT e g podemos determinar a massa da Terra!:
mT =gR2
TG
. (7.13)
Considere a seguinte situacao: um objecto m encontra-se a superfıcie da Terra.Duas forcas opostas agem sobre ele (Vd. Fig. 7.7-(a)). A forca gravitacional da Terrae−→F g e a forca de contacto denota-se por
−→N com o solo. Se o objecto nao se move,
temos −→N +−→F g = 0,
ou seja −→N =−−→F g.
Por sua vez a Terra encontra-se submetida a forca gravitacional da massa m e a forcade contacto com o objecto −→w (Vd. Fig. 7.7-(b)):
−→w =−−→F g.
Fig. 7.7 Forca gravitacional, reaccao do solo e peso w. (a): forcas actuando sobre o objecto; (b):forcas actuando sobre a Terra; ambas sao pares de forcas obedecendo a lei da accao-reaccao.
6 Henry Cavendish (1731 - 1810), foi um excentrico cientista britanico. Descobriu o hidrogenio.Usou uma balanca de torsao para determinar G. Contribuiu para o conhecimento dos fenomenoselectricos propondo a lei da atraccao entre cargas electricas e utilizando o conceito de potencialeletrico.

106 7 Forcas
Repare que todas as forcas referidas no exemplo anterior possuem igual magni-tude (modulo).
Ao nıvel quantico as leis de Newton nao descrevem com rigor a trajectoria daspartıculas quando submetidas ao campo gravıtico (−→g constante). A Fig. 7.8 rev-ela a natureza discreta das propriedades da materia. Sabe-se da Mecanica Quanticaque qualquer partıcula aprisionada num poco de potencial estara sujeita a estadosquanticos ligados. E por este motivo que os electroes existem em estados quanticos(discretos) na presenca de um campo electromagnetico e daqui resulta a estruturaatomica. Do mesmo modo, na presenca do campo gravıtico devera haver a formacaode estados quantificados. Na experiencia realizada por Valery V. Nesvizhevsky,no Instituto Laue-Langevin, neutroes eram atirados para um espelho horizontalnuma configuracao tal que, em conjunto com o campo gravıtico, se assemelha ascondicoes de um potencial finito. Verificou-se entao que os neutroes em queda naose movem de forma contınua, mas dao saltos de uma altura para outra, tal como epredito pela teoria quantica. Este exemplo ilustra bem os limites da aproximacao damecanica classica no ambito microscopico.
Fig. 7.8 Os pontos experimentais sao obtidos com intervalo de 2 m. A curva a tracejado corre-sponde a um ajuste usando calculos de mecanica quantica. A curva contınua e obtida com o calculoclassico do movimento balıstico. Ref. Valery V. Nesvizhevsky, Nature 415, 297-299 (2002).
No cap. 6 referimos que na visao actual da ciencia a interacao gravitacionalprocessa-se via um mediador. Esta ideia seminal foi proposta pelo fısico japonesHideki Yukawa em 1934. Ele mostrou que se dois protoes pudessem trocar partıculasvirtuais, o resultado da troca seria uma forca atractiva entre os protoes. Hoje sabe-seque essa partıcula e o mesao π . A massa relativamente elevada deste mediador im-plica uma forca (nuclear) forte. A Fig. 7.9 ilustra esta ideia. A partıcula virtual temum perıodo de existencia muito efemero.
Fig. 7.9 A troca de partıculas virtuais (ou mediadores) resulta numa forca de atraccao nuclearforte, de acordo com a ideia original de Hideki Yukawa.
7.1.1 Peso
A forca de contacto −→w que um objecto exerce sobre o que a suporta e chamada depeso de um objecto.
No exemplo anterior a forca−→F g age no objecto e −→w age na Terra. Nao havendo
aceleraccao, verifica-se necessariamente
−→w = m−→g . (7.14)

7.1 Forca gravitacional 107
7.1.2 Elevador acelerado
Ja conclusao diferente e obtida se o suporte do objecto se encontra acelerado, comosucede quando um objecto e colocado no chao dum elevador acelerado para cimacom aceleracao −→a .
As forcas que agem sobre m resultam nas equacoes:
N−Fg = ma,N = Fg +ma = mg+ma = m(g+a). (7.15)
N representa a forca que o elevador exerce sobre o objecto; Fg e a forca que a Terraexerce sobre o objecto. Atendendo a que a reaccao do piso e
−→N =−−→w , tem-se:
−→N =−−→w
∴| −→w |= m(g+a)em modulo.(7.16)
Isto e, o peso e aumentado da quantidade ma em relacao ao seu valor em repouso.Se o elevador move-se para baixo com aceleracao a′, entao teremos
w = m(g−a′), (7.17)
isto e, o peso diminui de ma′.
Fig. 7.10 Um objecto encontra-se colocado no chao de um elevador que e acelerado para cima.(a): forcas que agem sobre o objecto; (b): forcas que agem sobre o elevador.
Em queda livre podemos prever que a′ = g ∴ w = 0, o objecto nao tera peso,porque a forca de contacto com o suporte passara a ser nula.
Exemplo 2: - Astronauta ou satelite.Suponha que um satelite artificial encontra-se numa orbita circular em torno
da Terra (vd. Fig. 7.11). Na posicao orbital que ocupa a aceleracao e centrıpeta edesignemo-la por g′:
g′ =v2
R(7.18)
A forca que actua sobre o satelite e o astronauta e dada por
Fs = Fg = Mg′. (7.19)
As forca que actuam sobre o astronauta sao:
fa = fg−N = mg′. (7.20)
Mas, por definicaoFg = Mg′
fg = mg′. (7.21)

108 7 Forcas
Logo, atendendo a Eq. 7.20, obtem-se:
∴ w = N = 0.
Tal significa que o astronauta nao sente nenhuma forca de contacto com o chao e,portanto, o astronauta tem a sensacao que nao tem peso. Na verdade o astronautacontinua a ter o peso fg = mg′, a diferenca e que a superfıcie da Terra g = 9.8m/s2
aproximadamente e a 400 km de altitude g′ = 8.7 m/s2: o peso dum astronauta coma massa de 100 kg passaria de 98 N para 87 N, o que nao representa uma mudanca depeso muito significativa. Na verdade o satelite e o astronauta estao ambos em quedalivre para a Terra e daı resulta a sensacao fısica de perda de peso efectiva, porque oastronauta nao tem uma forca de contacto que o faca sentir a forca gravitacional,que efectivamente continua agindo sobre ele.
7.1.3 Massa gravitacional, massa inercial
Existem dois tipos diferentes de massa:Massa inercial: - Nas leis da mecanica a quantidade m e o coeficiente de pro-
porcionalidade entre a forca e a aceleracao,−→F = mI
−→a . A massa mI definida destaforma e chamada massa inercial.
Massa gravitacional: - A massa tambem e uma propriedade da materia que daorigem as forcas gravitacionais entre os corpos tal que
−→F =
GmT mg
R2T
= mg−→g . A esta
massa mg designa-se de massa gravitacional.
Fig. 7.11 Um astronauta num satelite em torno da Terra nao sente a gravidade.
Uma questao fundamental em fısica e: serao as duas iguais? Ajustando a con-stante da gravitacao universal G, obtemos de facto mI = mg
7.1.4 O Princıpio da Equivalencia
Albert Einstein ainda era um simples funcionario no escritorio de patentes emBerna, Suıca, quando teve o que ele considerou ser “a ideia mais feliz da minhavida”. Einstein ja tinha formulado a Teoria da Relatividade Restrita e procuravageneralizar aqueles conceitos a referenciais acelerados:
“Esta lei... da igualdade da massa inercial e da massa gravitacional foi entao compreendidapor mim com todo o seu significado. Fiquei abismado com a sua existencia e conjecturei queela deveria conter a chave para uma compreensao mais profunda da inercia da gravitacao”.
Einstein formulou entao assim o

7.1 Forca gravitacional 109
PRINCIPIO DA EQUIVALENCIA: Consideremos 2 referenciais: 1) um referencialR inercial nao acelerado no qual existe um campo gravitacional uniforme e 2) umreferencial R ′ acelerado uniformemente mas no qual nao existe um campo gravita-cional. Estes dois referenciais sao fisicamente equivalentes.
Einstein deu um passo gigantesco ao sugerir que nenhuma experiencia mecanica,eletromagnetica, etc., permite distinguir o referencial R de R ′.
7.1.5 Lei de Hooke. Molas
Todos os corpos sao elasticos ate certo ponto. Quando sao submetidos a uma forcade compressao ou extensao deformam-se.
Exemplos:
• bolas de aco;• tiras de borracha;• molas.
Um corpo resiste a deformacao por meio de uma forca de restauracao. A ex-periencia mostra-nos que quando puxamos uma mola ela por sua vez puxa-nostambem.
Em primeira aproximacao a relacao existente entre a forca de restauracao ea deformacao obedece a uma lei empırica muito simples conhecida por lei deHooke 7.
LEI DE HOOKE: a magnitude da forca de restauracao e directamente propor-cional a deformacao.
A lei de Hooke e conhecida na forma
T = El′− l
l(7.22)
onde T e a tensao (ou pressao) exercida sobre um corpo (por exemplo, uma barra demetal); l e o comprimento natural (ou na ausencia de tensao) da mola; E e o modulode Young (expresso em Pascal Pa no S.I.) 8; l′ o comprimento da mola sob tensao.
Pode ser tambem expressa em termos de uma forca ou tensao:
T = k(l′− l), (7.23)
sendo k uma constante elastica.
7 Robert Hooke (1635 1703) foi um filosofo, fısico e matematico ingles. Foi a primeira pessoa ausar a palavra “celula” como a unidade basica da vida. Hooke anunciou a sua lei da elasticidadena forma de um anagrama, como era por vezes usado por cientistas tais como Galileu, Huygense outros, de modo a estabelecer a prioridade da sua descoberta sem oferecer demasiados detalhesreveladores. O anagrama foi: ceiiinosssttuv, mais tarde foi revelado querer significar “ut tensio sicvis”, ou seja, como a extensao a forca8 Ou ainda modulo de elasticidade longitudinal. Por exemplo, para o aco tem-se Eaco ≈ 21000kN/cm2; concreto, Econc ≈ 3000 kN/cm2.

110 7 Forcas
Esta lei e:
• aproximada;• constitui uma descricao empırica;• e valida para pequenas deformacoes.
7.1.5.1 Mola helicoidal
Na Fig. 7.12-(a) mostramos uma mola helicoidal 9 relaxada, e em Fig. 7.12-(b)mostramos a mesma mola distendidada de um alongamento x. A lei de Hooke dizque
F =−kx (7.24)
onde k representa a constante elastica da mola e x o seu alongamento. O sinal nega-tivo significa que a forca restauradora se opoe a deformacao. Atencao, quando
• +x - a mola e esticada• −x - a mola e comprimida
Fig. 7.12 Mola helicoidal. (a), em repouso; (b)-distendida com alongamento x.
A constante k vem em unidades N/m no sistema SI. Quando k e elevada a mola erıgida (forca elevada po unidade de deslocamento), quando k e pequeno a mola emole (forca pequena por unidade de deslocamento).
Fig. 7.13 (a) - Se +x obtemos alongamento da mola e a forca negativa opoe-se ao estiramento;(b) - Se −x temos compressao da mola e a forca com que a mola reage e positiva opondo-se a suacompressao. Sempre os pares de forcas presentes na lei da accao-reaccao.
A Fig. 7.14 mostra uma curva tıpica tensao-alongamento.
Fig. 7.14 Curva tıpica de tensao-alongamento.
QuadroNegro 1 - Molas em paralelo
9 Em ingles chama-se coil spring.

7.1 Forca gravitacional 111
Em paralelo, a constante elastica efectiva e ke f f = k1 + k2.
QuadroNegro 2 - Molas em serie
Em serie, a constante elastica efectiva e dada por 1/ke f f = 1/k1 +1/k2.
7.1.6 Movimento com forca constante
−→F = m−→a
Se−→F = const. entao −→a = const.
Num sistema de eixos ortogonais:
∑Fx = max
∑Fy = may
∑Fz = maz
(7.25)
Forcas:
• Tensao,• gravidade,• forca normal, de contacto• friccao.• mola.
Exemplo 3: Considere duas massas em tandem (Fig. 7.15) deslizando sobre umplano horizontal, sem friccao e despreze a massa dos cabos de ligacao.

112 7 Forcas
Fig. 7.15 (a) Duas massas em tandem unidas por um cabo sem massa; (b): forcas actuando sobrea massa m2; (c): forcas actuando sobre a massa m1.
Sobre a massa m2 agem as forcas:
F−T2 = m2a2 eixo OxN2−m2g = 0 eixo Oy (7.26)
Sobre a massa m1 agem as forcas:
T1 = m1a1 eixo OxN1−m1g = 0 eixo Oy (7.27)
Os dois corpos estao constrangidos a moverem-se juntos, e temos assim obrigatori-amente a1 = a2 = a. Um cabo ideal actua de modo que T1 =−T2 = T .
A adicao das componentes em OX resulta em
F = (m1 +m2)a (7.28)
dondea =
Fm1 +m2
(7.29)
Da Eq. 7.28 obtem-seT = m1a =
m1
m1 +m2F.
7.1.7 Polias ideais
• Sao usadas polias ideias para mudar a direcao da forca exercida pelos cabos;• Se o cabo e a polia nao tiverem ambos massa, a tensao e a mesma de ambos os
lados da polia• No caso contrario, isto ja nao e verdade;• Assume-se que as polias ideais nao tem massa nem exercem friccao.
A componente normal da forca de contacto e suposta bisectar o angulo entre osextremos do cabo (Fig. 7.16).
Fig. 7.16 A componente normal da forca de contacto bisecta o angulo entre os extremos do cabo.
Os cabos so podem servir para puxar (exercer tensao, nao compressao).
• cabos de massa desprezavel: a tensao e a mesma por todo o lado;

7.1 Forca gravitacional 113
• Se a massa do cabo e diferente de zero, trata-se como outro corpo massivo qual-quer;
• O cabo e suposto nao ter resistencia interna e alinha-se com a forca aplicada;• assume-se que nao ha alongamento do cabo (mantem o comprimento constante).
Fig. 7.17 (a) Dois blocos encontram-se ligados por meio de um cabo e sao puxados por uma forcaaplicada F . O cabo tem comprimento L e massa mc. (b), (c), and (d) Diagramas das forcas actuandosobre o bloco m2, o cabo de ligacao mc, e o bloco m1, respectivamente.
Exemplo 4: Dois blocos estao ligados por uma corda, como mostra a Fig. 7.17.Como os blocos estao unidos a aceleracao de ambos e a.
m1 : F−T1 = m1am2 : T2 = m2amc : T1−T2 = mca
(7.30)
O somatorio resulta emF = (m1 +m2 +mc)a
assim comoT1 = F−m1a = (m2 +mc)a
eT2 = m2a,
isto e, T1 6= T2.Verificamos que, devido a massa do cabo, a tensao nao e a mesma ao longo do
seu comprimento. Seja l o seu comprimento e Tl a tensao no ponto l (Fig. 7.18).
Fig. 7.18 O cabo e secionado longitudinalmente numa extensao de comprimento l e noutra deextensao L− l.
QuadroNegro 3 -

114 7 Forcas
Exemplo 5: Contrangimento: Considere o sistema da Fig. 7.19 sem atrito, caboe polia com massa desprezavel.
Massa m1:T1 = m1a1
N−m1g = 0 (7.31)
Massa m2:m2g−T2 = m2a2
Polia:2T1−T2 = 0.
Constrangimento: Quando m1 move-se a distancia x1 para a direita, a massa m2 caia distancia x2 = x1/2.
∴ a2 =d2x2
dt2 =12
a1. (7.32)
Das Eqs. anteriores e facil obter
a2 =
(m2
4m1 +m2
)g
que deve ser resolvido com o que ja tinhamos obtido a1 = 2a2.
Fig. 7.19 Polia e cabos com massa desprezavel do exemplo.
Exemplo 6: Massas acopladas: Assuma que nao ha friccao e os cabos tem massadesprezavel (Fig. 7.20).
Fig. 7.20 Massas acopladas.
Massa m1:eixoOx m1gsinθ −T = m1aeixoOy N1−m1gcosθ = 0 (7.33)
Massa m2:eixoOx T = m2aeixoOy N2−m2g = 0 (7.34)
Somando as componentes em Ox das Eqs. 7.33- 7.34, obtem-se
m1gsinθ = (m1 +m2)a (7.35)
∴ a =m1
m1 +m2gsinθ . (7.36)

7.1 Forca gravitacional 115
7.1.7.1 Maquina de Atwood
Considere o conjunto de duas polias com massa desprezavel e sem atrito e um cabocom massa igualmente desprezavel (Fig. 7.21) - maquina de Atwood 10.
Fig. 7.21 Maquina de Atwood.
Massa m1:
(T −m1g) = m1a
Massa m2:
(m2g−T ) = m2a
A sua soma resulta em
(m2−m1)g = (m2 +m1)a
∴ a =(
m2−m1m2+m1
)= 1
5 (m/s2)
Aplicacao numerica: m1 = 2 kg e m2 = 3 kg.Tensao do cabo
T = m1(a+g) = m1
(m2−m1
m2 +m1+1)=
(2m1m2
m2 +m1
)g
Repare que To = 2T (vd. Fig. 7.21).A maquina de Atwood ideal consiste em dois objectos de massa m1 e m2, ligadas
por um cabo de massa desprezavel colocado por cima de uma polia igualmente demassa desprezavel e sem atrito. Quando m1 = m2, a maquina fica em equilıbrioneutro, qualquer que seja a posicao das massas. Quando m2 > m1 ambas as massasexperimentam uma aceleracao uniforme.
A maquina de Atwood tem inumeras aplicacoes. Por exemplo, nos elevadoresusa-se um contrapeso que desempenha o mesmo papel, aliviando o motor, porqueassim este nao gasta energia puxando a caixa onde se desloca a carga, bastando omotor para compensar a diferenca de inercia das duas massas. O mesmo princıpio eusado nos funiculares com dois trilhos de ferro ligados num plano inclinado.
Exemplo 7: Plano inclinado acelerado. Considere um bloco de massa m deslizandosem atrito sobre um plano inclinado fazendo um angulo θ com a horizontal. O planoinclinado esta acelerado com aceleracao de modulo a para a direita da Fig. 7.22.Calcule o angulo θc para o qual o bloco nao escorrega para cima ou para baixo doplano.
10 A maquina de Atwood foi inventada em 1784 pelo Reverendo George Atwood para ser umamontagem de laboratorio destinada a testar as leis do movimento uniformemente acelerado.

116 7 Forcas
Fig. 7.22 Plano inclinado acelerado.
O bloco nao deslizara se tiver aceleracao igual a do plano inclinado (porque talsignifica que ele move-se em conjunto com o plano). O sistema de forcas resulta nasseguintes equacoes (escolhendo o sistema de coordenadas com Ox na horizontal):
f orcasaolongodeOx N sinθ = maf orcasaolongodeOy N cosθ −mg = 0. (7.37)
Da ultima equacao resultaN = mg
cosθ
∴ mgcosθ
sinθ = ma (7.38)
ou sejaa = g tanθc.
7.1.8 Friccao
Superfıcies em contacto exercem duas forcas uma na outra:
• uma forca e normal e perpendicular as superfıcies;• outra forca paralela, a forca de friccao. As forcas de friccao opoem-se sempre ao
movimento relativo entre as duas superfıcies.
7.1.8.1 Forcas de friccao
As forcas de friccao desempenham um papel muito importante no movimento dosobjectos reais, como se tornara claro com os exemplos que serao apresentados. Essasforcas resultam das forcas atractivas (do tipo de Van der Waals) que se estabelecementre os atomos das diferentes superfıcies. A sua descricao a um nıvel microscopicoe muito complexa, muito embora a sua descricao ao nıvel macroscopico seja muitoempırica 11. Essas leis sao as seguintes: a forca de atrito e
• proporcional a forca normal entre duas superfıcies• e independente da area de contacto• e independente da velocidade.
11 Leonardo da Vinci (1452-1519) foi o primeiro a fazer estudos quantitativos do problema dafriccao. A montagem experimental usada por da Vinci era muito simples. Media o angulo do planoinclinado a partir do qual um objecto colocado na sua superfıcie comecava a deslizar.

7.1 Forca gravitacional 117
7.1.8.2 Friccao cinetica
Quando as superfıcies estao animadas de movimento relativo essa forca e
fk = µkN (7.39)
onde µk e o coeficiente de friccao cinetico (0 < µk < 1), e N e a forca de contacto(normal).
• a forca de friccao e proporcional a N;• e paralela a superfıcie de contacto;• opoem-se a direccao do movimento;• lei empırica e aproximada;• µk depende da natureza dos materiais;• µk e independente de v.
Exemplo 8: Um bloco de massa m = 100 kg move-se para a frente com veloci-dade constante, −→a = 0. O coeficiente de friccao cinetico e µk = 0.40. Determine aforca F que actua sobre o bloco (Fig. 7.23).
Componente vertical da forca:
N +F sin30o−mg = 0.
Componente horizontal da forca:
F cos30o− fk = 0
onde fk = µkN. Donde resulta:
F cos30o−µk(mg−F sin30o) = 0,
ou sejaF =
µkmgcos30o +µk sin30o
F =0.40×100×9.80
0.866+0.40×0.50= 368N.
Fig. 7.23 Bloco de massa m sobre um plano com friccao.
Repare queθ = 0o F = 392Nθ = 45o F = 396Nθ = 90o F = 981N
(7.40)

118 7 Forcas
7.1.8.3 Friccao estatica
As forcas de friccao tambem actuam sobre superfıcies em repouso (sem movimentorelativo).
Objectos em repouso requerem a aplicacao de uma forca para iniciarem o movi-mento. A forca de friccao estatica e:
fs ≤ µsN, (7.41)
onde µs designa o coeficiente de friccao estatico e N a forca (normal) de contacto.
• forcas de friccao podem ter qualquer magnitude entre zero (quando nao ha qual-quer outra forca actuando paralelamente a superfıcie) ate ao valor maximo µsN;
• O sinal de igualdade so se verifica quando o movimento esta prestes a comecar.
Propriedades da forca de friccao estatica:
• proporcional a forca normal;• e independente da area;• lei empırica;• opoe-se a forca aplicada;• usualmente µs > µk, de modo que e necessario uma forca menor para manter o
objecto em movimento;• µs depende da natureza e condicoes das superfıcies.
Exemplo 9: Bloco sobre uma superfıcie horizontal (Fig. 7.24).a) Repouso: f1 < µsN (Fig. 7.24-(a)).
Fig. 7.24 (a) e (b): quando fs < fs,max, a forca de friccao e exactamente igual a forca (externa)aplicada, e nao ha aceleracao do bloco. (c): quando uma forca de suficiente magnitude e exercidade modo que o moviemento se torna possıvel, a forca de friccao e igual a µkN e a aceleracao e(F−µkN)/m.
b) No limiar do movimento: f2 = µsN (Fig. 7.24-(b))c) Movimento iniciado: f3 = µkN (Fig. 7.24)Exemplo 10: Plano inclinado de angulo variavel destinado a medir coeficientes
de friccao estaticos.O bloco comeca a sua queda quando angulo α = 23o. Qual e o coeficiente de
friccao estatica, µs?
eixoOy N−mgcosα = 0eixoOx mgsinα− f = 0 (7.42)
Repare que este angulo α constitui o limiar a partir do qual o bloco acelera, portantoainda estamos na condicao −→a = 0. Temos assim
fN
=mgsinα
mgcosα= tanα (7.43)

7.1 Forca gravitacional 119(fN
)max
= µs = tan23o = 0.424.
O angulo maximo e chamado de angulo de repouso e e independente da massa dobloco.
Exemplo 11: Bloco a deslizar num plano inclinado sob a ac. ao da gravidade.
eixoOx mgsinθ − f = maxeixoOy N−mgcosθ = may = 0 (7.44)
∴ N = mgcosθ . (7.45)
Por sua vez sabemos quef = µkN (7.46)
substituindo na Eq. projectada em Ox, temos
mg(sinθ −µk cosθ) = max, (7.47)
donde resulta:ax = (sinθ −µk cosθ)g. (7.48)
Se ax = 0, entao obtemos o coeficiente de friccao cinetico procurado:
µk =sinθ
cosθ= tanθ . (7.49)
Assim, concluımos que um metodo razoavel para determinar µk consiste em deter-minar o angulo limite a partir do qual da-se uma aceleracao do bloco.
Fig. 7.25 Bloco a deslizar num plano inclinado sob a acao da gravidade.
Exemplo 12: Bloco sobre uma parede vertical.Considere um bloco apoiado sobre um plano vertical (por ex., sobre o quadro
negro, Fig. 7.26).As duas equacoes que resultam da projecao nos eixos cartesianos Ox, e Oy, sao:
∑Fx = P−N = 0(a)∑Fy = fs−w = 0(b) (7.50)
Da Eq. 7.50-(b) temos fs = w e da Eq. 7.50-(a) temos P = N, sendo P a forcade compressao exercida pela punho. Mas fs ≤ µsP. Para que nao haja deslize enecessario que fs ≥ w,
∴ µsP≥ w, (7.51)
ouP≥ w
µs. (7.52)

120 7 Forcas
Portanto, a forca de compressao mınima para que nao haja deslize do “apagador”do quadro negro e:
P =wµs
. (7.53)
Fig. 7.26 Apagador puxado por um operador na vertical contra o quadro negro.
Exemplo 13: Bloco puxado para cima ao longo de um plano inclinado.Consideremos agora a nova situacao de um bloco puxado ao longo de um plano
inclinado (Fig. 7.27).Suponha que os dados numericos sao os seguintes: m = 5 kg, F = 20 N, µk =
0.42. A pergunta e: qual e a aceleracao?Assuma que o movimento e para cima:
eixoOx F− f −mgsin60o = maxeixoOy N−mgcos60o = 0 (7.54)
Ao longo de Oy nao ha aceleracao.
∴ N = mgcos60o. (7.55)
Donde resultaf = µkN = µkmgcos60o (7.56)
ouax =
F−mgsin60o−µkgcos60o
m=−6.55m/s2. (7.57)
Fig. 7.27 (a) - Bloco puxado contra a gravidade ao longo de um plano inclinado. (b) - Pino dedisparo do torpedo Mark-6.
Isto e, o bloco coom os valores numericos assumidos esta acelerado para baixo;ha que inverter o sentido da forca de atrito!
F−mgsin60o + f = maxN−mgcos60o = 0 (7.58)
Resolvendo obtem-se a =−2.43 m/s2. Agora a direccao do bloco e para baixo, mase consistente com as hipoteses iniciais.
Exemplo 14: Durante a Segunda Guerra Mundial (1939-1945) os norte-americanostiveram serios problemas no funcionamento dos torpedos lancados pelos seus sub-marinos. Um desses problemas estava relacionado com o mecanismo de disparoque nao funcionava correctamente. Ate que fosse compreendido a causa do prob-lema cerca de 70 % dos torpedos nao explodiam! Descobriu-se que a causa estava

7.1 Forca gravitacional 121
no atrito enorme a que era submetido o pino de disparo. Este dispositivo tem basi-camente a estrutura mostrada na Fig. 7.27-(b). A massa M desliza na superfıcie AAsendo actuada por uma forca de friccao
−→F = µk
−→N . Quando o dispositivo esta em
repouso e a compressao da mola e ∆x = D, a mola exercera uma forca kD sobre Me a aceleracao de M relativa a superfıcie imovel AA sera
a =kDM−µkg. (7.59)
Porem, se o dispositivo estiver submetido a uma aceleracao vertical a′ = Kg, ondedesignamos por K uma constante positiva sem dimensoes, a aceleracao sentida noreferencial do dispositivo acelerado sera
a =kDM−µkg(1+K) (7.60)
porque a forca normal exercida entre AA e M aumentou de Mg para Mg(1+K).Conclui-se assim que a aceleracao vertical aumentou consideravelmente a forca deatrito e reduzindo a aceleracao de M ao longo de AA, podendo em particular im-pedir o deslize da massa M e portanto provocando a falha do pino de disparo dotorpedo. Uma atempada resolucao da falha dramatica dos pinos de disparos feitapostriormente pelos norte-americanos mostrou que o final da guerra poderia ter sidoantecipado.
7.1.9 Forca de atrito e velocidade terminal
Os objectos que se movem em meio fluido (agua, ar,...) estao submetidos a umaforca de atrito que se opoe ao movimento. A resolucao detalhada deste problemae muito complexo. Geralmente considera-se existir 2 regioes distintas do fluxo dofluido em torno do objecto.
1. Fluxo laminar: fluxo estavel em torno do objecto; FD ∼ v; a lei de Stokes 12
aplica-se (Fig. 7.28).2. Fluxo turbulento: FD ∼ v2, a velocidade e suficientemente elevada de modo que
o fluxo de ar atras do objecto e turbulento. As partıculas do fluido fluctuam demodo desordenado, caotico, produzindo vortices (ou vortexes), vd. Fig. 7.28.
O escoamento do fluido em torno de um objecto e sempre turbulento 13 nos casos:
12 In 1851, George Gabriel Stokes obteve uma expressao matematica das forcas de friccao (ouresistiva) exercida sobre objectos de forma esferica valida quando o numero de Reynolds e muitopequeno (em particular, valida para partıculas muito pequenas) num fluido viscoso, FD = 6πRµv,onde FD e a forca de friccao, R e o raio do objecto esferico, µ e a viscosidade dinamica do fluido,e v e a velocidade da partıcula.13 Conta-se que alguem teria perguntado ao celebre cientista alemao Werner Heisenberg o que eleperguntaria a Deus, se tivesse essa oportunidade. Ele teria respondido: “Quando me encontrar com

122 7 Forcas
Fig. 7.28 Fluxo laminar (a) e turbulento (b-d) em torno de uma esfera.
• bola de baseball (42 m/s);• paraquedista (5 m/s);• ...
Em 1883 Osborne Reynolds 14 descobriu o fenomeno de turbulencia em dinamicados fluidos quando estudava o escoamento da agua atraves de tubos cilindricos de-vido a um gradiente de pressao. Reynolds descobriu que quando uma velocidadecrıtica era atingida (e bem caracterizada por um valor crıtico hoje chamado em suahomenagem “numero de Reynolds” 15, Rec) era excedida o escoamento tornava-seturbulento. Hoje em dia compreende-se que o fenomeno de turbulencia deve-se a ummovimento caotico solenoidale do fluido acompanhado por um grande incrementodas propriedades de transporte tais como a viscosidade (transferencia de momen-tum), difusividade (transferencia de massa), conductividade termica (transferenciade energia), e resistividade electrica (na passagem da corrente electrica). O fluxoturbulento e mantido energeticamente pelo fluxo principal e as perdas de energiaaparecem sob a forma de quedas de pressao ou perdas por friccao.
Fig. 7.29 Um “skydiver” em queda livre...Normalmente um “skydiver” na posicao barriga paraa Terra atingira uma rapidez de cerca de 200 km/h. Esta e a chamada velocidade terminal. Haquem diga que nos anos 60 um sujeito chamado Joe Kittenger ultrapassou a barreira do som aocair de uma altitude de cerca de 31 km. A rapidez com que uma pessoa cai pode ser ajustada coma variacao do coeficiente de friccao. Uma pessoa com a cabeca para baixo oferecendo uma menorresistencia pode atingir cerca de 300 km/h. Ao abrir o para-quedas a velocidade terminal do sujeitoreduz-se para cerca de 24 km/h de 4 para 5 segundos.
7.1.10 Forca resistiva proporcional a velocidade
Qual a forma da forca de atrito, resistiva, exercida pelo meio sobre os objectos?
• objectos em queda atraves de um fluido;
Deus irei colocar-Lhe duas questoes: Porque a relatividade? E porque a turbulencia? Eu acreditodeveras que Ele tera uma resposta para a primeira.”14 Osborne Reynolds (1842 1912), engenheiro irlandes, deu contribuiucoes importantes na areada dinamica dos fluidos. Estudou igualmente os fenomenos de transferencia de calor entre solidose fluidos, contribuindo assim nos melhoramentos em caldeiras e condensadores.15 Em mecanica dos fluidos, o numero de Reynolds e uma grandeza sem dimensoes dado peloracio das forcas de inercia sobre as forcas de viscosidade Re≡ uL
ν, onde u e a velocidade do fluido
(em m/s), L e um comprimento caracterıstico (em metros) e ν e o coeficiente de viscosidadecinematica (em m2/s). Re quantifica a importancia relativa desses dois tipos de forca para umdeterminado escoamento.

7.1 Forca gravitacional 123
• pequenos objectos (partıculas de poeira) no ar.
Essa forca resistiva tem a forma:
−→F D =−b−→v . (7.61)
onde
• −→v - velocidade do objecto;• b - constante que depende do meio e da forma do objecto. Por exemplo, para uma
esfera, tem-se b∼ r em unidades SI kg/s.
Fig. 7.30 As forcas resistivas dependem da forma do objecto e em particular da area da secaotransversal do objecto. Na figura mostra-se desenhos de um aviao Messerschmitt Me 262 A-1a defabrico alemao.
Considere o movimento de uma esfera de massa m atraves de um fluido. Duasforcas actuam sobre a esfera:
• mg - peso (eventualmente incluindo ja as forcas de impulsao)• −bv - forca resistiva.
Aplicando a segunda lei de Newton:
∑Fy = may (7.62)
QuadroNegro 4 - Forcas resistivas sobre uma esfera.

124 7 Forcas
Quando o objecto cai no inıcio do movimento quando t = 0, tem-se supostamenteneste caso v = 0 e a forca resistiva e nula.
No inıcio a aceleracao inicial e suposta ser a da gravidade:
a(t = 0) =dvdt
= g. (7.63)
A medida que o tempo t passa, a velocidade do objecto v aumenta, e a forca re-sistiva aumenta igualmente ate que a um dado momento a aceleracao pode mo-mentaneamente decrescer. Estabelece-se um equilıbrio natural de forcas. Quando aforca resistiva iguala o peso, a aceleracao de facto anula-se. O objecto continua omovimento, mas com uma velocidade terminal, sem aceleracao.
QuadroNegro 5 - velocidade do objecto e velocidade terminal
Fig. 7.31 (a): As asas dos avioes sao concebidas para terem um fluxo laminar.
Ha maneiras de contornar o efeito resistivo do meio fluido. O fenomeno decavitacao acontece quando a pressao da agua baixa ate valores inferiores ao do vaporde agua (ou quando a pressao de vapor ultrapassa a pressao da agua). A cavitacaoocorre dentro de uma bomba hidraulica ou em torno de um obstaculo, por exemplo,uma helice com alta rotatividade. As pequenas bolhas de vapor de agua formadasimplodem rapidamente resultando num aumento rapido da pressao ambiente queacaba por danificar fisicamente as helices propulsores erradamente projectadas.
A supercavitacao corresponde ao fenomeno de cavitacao descrito acima masonde o efeito e usado de forma sustentada e amplificadamente. As caracterısticas

7.1 Forca gravitacional 125
de um objecto supercavitando 16 consistem na forma do “nariz”, que deve ser planacom saliencias agudas, e com linhas aerodinamicas ou hidrodinamicas que seguemas linhas de fluxo do fluido. Quando o objecto atinge uma velocidade de cerca de 440m/s, a agua e deflectida pelo nariz com tal rapidez que o objecto acaba por “voar”dentro da bolha de vapor de agua entretanto criada. Para la de determinada veloci-dade, ou injectando gas para dentro da bolha de vapor de agua formada consegue-seestender a cavidade de modo a envolver por completo o corpo do objecto.
Foram propostos os mais diversos processos de propulsao, entre os quais objectossub-aquaticos propelidos por um motor de foguetao “queimando” alumınio comagua. O torpedo ‘VA-111 Shkval” e um objecto supercavitando, fabricado pelosrussos (alias, provavelmente os maiores especialistas mundiais em mecanica dosfluidos) e esta na origem do afundamento tragico do submarino russo “Kursk” (vd.Fig. 7.32).
Fig. 7.32 Detalhes do nariz do Shkval e destrocos do submarino “Kursk”.
7.1.11 Queda dos corpos no ar
A forca de atrito (ou de arrasto) e do tipo:
FD =12
CρAv2. (7.64)
A forca e proporcional a (velocidade)2.
• A : area transversal efectiva do objecto;• ρ : densidade do ar;• v : velocidade do objecto em queda;• C : coeficiente de atrito (sem dimensao), depende da geometria do objecto (usual-
mente C = 0.5→ 1.0).
Quando o objecto atinge a velocidade terminal, verifica-se FD =mg, donde se obtem
∴12
CρAv2t = mg. (7.65)
∴ vt =
√2mgCρA
,m/s. (7.66)
Exemplo 15: Um paraquedista salta de um aviao, percorrendo inicialemente umacerta distancia antes de abrir o paraquedas. O modulo da forca de atrito e dado por
16 Em ingles designa-se “supercavitating object”.

126 7 Forcas
Fa = 1/2CDSρv2, sendo CD o coeficiente aerodinamico, ρ a densidade do ar e S asuperfıcie de atrito. Considere os seguintes valores: m = 70 kg, ρ = 1.2 kg/m3;
Paraquedista com os bracos e pernas em “X” : CD = 0.56,S = 0.7m2
Paraquedista com o parauedas aberto : CD = 2.30,S = 12m2
a) Escreva a equacao do movimento e calcule a velocidade terminal (ou limite)em funcao dos parametros dados;
Facilmente vemos que podemos a aceleracao a partir da equacao fundamental dadinamica; projectamos as forcas gravıtica e de atrito num eixo vertical:
dvdt
= g− 12m
CDSρv2 = g(1− v2
v2l) (7.67)
sendo que a velocidade terminal, aquela na qual a aceleracao e nula e a velocidadeconstante, e dada por
vl =
√2mg
CDSρ. (7.68)
b) Calcule a velocidade em funcao do tempo. Ao fim de quanto tempo e atingida90% da velocidade terminal?
Como se depreende analisando a Eq. 7.67, e conveniente usar o metodo daseparacao das variaveis:
gdt =dv
1− v2
v2l
. (7.69)
Pode-se ler numa Tabela de Integrais o valor do integral indefinido:∫ dxa2− x2 =
12a
ln(
a+ xa− x
). (7.70)
Substituindo, obtem-se logo
∫ t0 gdt = vl
∫ t0
dv′/vl
1− v′2v2l
= vl2 ln
(1+v/vl1−v/vl
)t = vl
2g ln(
1+v/vl1−v/vl
)⇒ e2gt/vl = 1+v/vl
1−v/vl(1− v
vl
)e2gt/vl = 1+ v
vl
− vvl
(1+ e2gt/vl
)= 1− e2gt/vl
∴ v(t) = vle2gt/vl−1e2gt/vl +1
.
(7.71)

7.1 Forca gravitacional 127
t = vl2g ln
(vl+vvl−v
)t = vl
2g ln(
vl+0.9vlvl−0.9vl
)t = vl
2g ln( 1
0.1
)= vl
2g 2.3 = 0.12vl ≈ 0.6s,
(7.72)
quando vl = 54 m/s; ou t ≈ 6 s, quando vl6.44 m/s.c) Qual a altura equivalente da qual o paraquedista poderia cair, sem paraquedas,
para sofrer um embate semelhante?
mgH = 12 mv2
⇒ Heq =v2
2g ≈ 149m(7.73)
quando vl = 54 m/s, e Heq ≈ 2 m, quando vl = 6.44 m/s.
7.1.12 Cordas e postes
Considere uma corda enrolada em torno de um poste (Cf. Fig. 7.33). Queremosrelacionar a forca nas extremidades da corda com o comprimento da corda enroladaem torno do poste se o coeficiente de friccao estatico for µ .
• assume-se que nao ocorre deslize;• A seccao da corda faz um angulo dγ no centro;• Seja N a forca normal actuando na corda por unidade de comprimento em qual-
quer ponto.
Fig. 7.33 Corda enrolada em torno de um poste.
QuadroNegro 1 - Corda enrolada num poste

128 7 Forcas
Considere uma corda de comprimento l enrolada em torno de um poste. Tem-se
Rγ = l
e
T = To exp(
µlR
)Por exemplo, uma corda enrolada com uma so volta em torno do poste, resulta em
γ =lR= 2π
e seja µ = 0.40. Vem
T = To exp(0.40×2π) = 12.3To
o que representa uma formidavel multiplicacao do esforco exercido pela tensao dacorda!
REGRA: Se uma corda leve estiver em contacto com uma superfıcie (curva) comatrito µ , o racio das tensoes em dois pontos quaisquer e igual a e a potencia de µ
vezes o angulo entre as tangentes (ou entre as normais nesses pontos):
T2 = T1eµ(θ2−θ1). (7.74)
Exemplo 1: Forcas aerodinamicas 17: Equilıbrio de um aviao.As forcas aerodinamicas exercem-se simetricamente sobre um aviao e sao me-
didas num “tunel de vento” 18, onde se estabelece um escoamento horizontal de ar(com uma velocidade determinada) em torno de um prototipo imovel.
Como e ilustrado na Fig. 7.34 num objecto em voo (ex., aviao) actuam asseguintes forcas:
• forca de sustentacao,−→R ;
• forca de arrasto,−→F D;
• peso, −→w ;• empuxo ou traccao,
−→T .
Em voo horizontal, a forca de sustentacao equilibra o peso, enquanto que a forca dearrasto deve ser equilibrada pela traccao.
Por convencao, as forcas aerodinamicas sao medidas em relacao ao eixo paraleloa velocidade de escoamento. O angulo de incidencia i (ou angulo de ataque) e oangulo que o vector velocidade de escoamento faz com o plano da asa (Fig. 7.34-(b)-(c)).
17 A materia exposta neste exemplo tem um caracter meramente informativo para resolver esteproblema, nao precisa de a decorar para o exame.18 Um tunel de vento e um aparelho de investigacao em aerodinamica, usado para estudar o escoa-mento de ar em torno de objectos solidos.

7.1 Forca gravitacional 129
Fig. 7.34 (a) Grafico do CL vs. angulo de ataque. (b) . (c) Forca de sustentacao.
Suponhamos que a aeronave A-10 Thunderbolt 19 (peso bruto maximo e 22950kg) utiliza o perfil de asas com as caracterısticas do grafico apresentado na Fig. 7.34.O A-10 Thunderbolt pode transportar uma grande quantidade de armamento. A areadas asas e de S = 42 m2. Calcule a forca de sustentacao do A-10 voando a 320Km/h a uma altitude proxima do nıvel do mar, com angulo de ataque de 0o (onde adensidade do ar e 1.22 Kg/m3).
Convertamos a rapidez: da 88 m/s. Lendo o grafico da Fig. 7.34, registamos CLa 0o igual a cerca de 0.07. Ora, a forca de sustentacao da asa e dada pela formula:
FL =12
ρV 2SCL, (7.75)
onde CL e o coeficiente de sustentacao do perfil da asa.Introduzindo os valores numericos conhecidos na formula anterior, temos:
FL =12
1.22×882×42×0.07 = 13888.1N. (7.76)
Isto e, temos uma forca capaz de sustentar um peso de cerca de 1300 kg. Oaerofolio com estas caracterısticas nao e capaz de empurrar o aviao A-10 para cima.Deve-se escolher outro tipo de asa!
Fig. 7.35 Flaps e slats de uma aeronave.
Qual o CL necessario para que o aviao nao caia antes de tocar a pista, supondoque o aviao atinge a pista a 190 km/h?
O CL e dado por:
CL =2FL
ρV 2S.
FL deve ser exactamente igualado pelo peso da aeronave, pois no momento do pousoa aeronave toca o solo suavemente, quase em voo nivelado, e lembre-se que em voonivelado as forcas se equilibram. Verificamos assim:
CL =2×13888.1
1.22×532×42== .193.
Observando o grafico, verificamos que este perfil nao atinge o CL necessario. O CLmaximo ocorre quando o angulo de ataque e de cerca de 20o. A aeronave ira perdersustentacao e um acidente dramatico certamente ocorrera...
19 O A-10 Thunderbolt foi o primeiro aviao norte-americano cosntruıdo para apoio proximo dasforcas terrestres, possui uma grande maneabilidade a baixa altitude e velocidade, representandoem particular um adversario perigosıssimo para os tanques.

130 7 Forcas
Existem processos capazes de minorar estas dificuldades usando-se os “flaps” eos “slats” 20. Os “flaps” destinam-se a aumentar a curvatura da asa (aumentando as-sim o CL), tornando desnecessarios atingir angulos de ataque elevados, proximos daperda de sustentacao, ou “stall”. Deste modo a aeronave pode voar em velocidadesmuito baixas para realizar um pouso seguro. Os “slats” corrigem o escoamento so-bre a asa, obrigando a camada limite a aderir ao aerofolio, e tornando possıvel aaeronave alcancar angulos de ataque maiores.
Exemplo 2: Forca de sustentacao durante a re-entrada na atmosfera por umanave.
Neste exercıcio ilustramos a aplicacao da forca centrıpeta num problema degrande importancia pratica.
Faz mais de meio seculo que as aeronaves em voo nivelado foram desenhadospara obedecer a relacao simples:
Peso = forca-de-sustentacao.
Contudo, no que se refere a satelites temos que corrigir a linguagem, porque umsatelite com um voo nivelado teria uma trajectoria rectilınea, isto e, abandonariaa Terra ao longo da tangencial. Devemos entao modificar a equacao simples an-terior, tendo em atencao a curvatura da Terra. Temos que incluir uma nova forca(centrıpeta):
∑−→F = m v2
r−→n
−Rz +wg = m v2
r ∴ Rz = wg−m v2
r ,(7.77)
onde Rz representa a forca de sustentacao e wg o peso do satelite, ou seja:
Rz
wg= 1− v2
wgR. (7.78)
Desta expressao concluımos que a forca e dirigida para baixo a velocidades pe-quenas (relativamente aquelas que normalmente sao atingidas pelos satelites), masquando a nave atinge velocidades mais elevadas, a forca e dirigida para cima(no chamado “voo invertido”), Vd. Fig. 16.1.6. O uso da forca aerodinamica desustentacao permite controlar o voo da nave, ou melhor, a re-entrada na atmosferaterrestre, aumentando tambem o tempo de voo.
Table 7.1 Fracao do peso do veıculo mantido pela forca de sustentacao. Voo a altitude constante.
rapidez (milhas/s) 0 1 2 3 4 5 6 7 8FL/wg 0.96 0.84 0.64 0.36 0 -0.44 -1 -1.56
Mach number 0 4.8 9.6 14.4 19.2 24 29 34 38.4
20 Flaps sao dispositivos hiper-sustentadores, presentes nos bordos de fuga e semelhantes a abas;slats sao superfıcies aerodinamicas colocadas no bordo de ataque de uma asa que, quando aciona-dos, permitem o aumento do angulo de ataque.

7.1 Forca gravitacional 131
Fig. 7.36 (a) : Formas e diferentes tipos de atritos gerados. A introducao do conceito de corpode reentrada rombudo (“blunt-body”) foi criado por H. Julian Allen and A. J. Eggers, Jr. do “Na-tional Advisory Committee for Aeronautics” (NACA) em 1951. Eles descobriram que um corpode reentrada rombudo era o mais eficaz a criar um escudo termico, mostrando que a carga termicaexperimentada pelo veıculo de reentrada era inversamente proportional ao coeficiente de atrito.Com a forma rombuda o ar nao consegue escapar rapidamente, actuando como uma almofada queempurra a onda de choque e a camada limite termica (“heat shock layer”) para longe do veıculo.(b) : Reentrada directa ou mais tangencial do veıculo espacial. (c) : Quatro imagens representandoconcepcoes iniciais dos veıculos de re-entrada na atmosfera. A teoria do corpo de reentrada rom-budo permitiu o “design” que foi posteriormente utilizado nas capsulas espaciais Mercury, Geminie Apollo, tornando possıvel a sobrevivencia dos astronautas durante a reentrada da atmosfera ter-restre.
Exemplo 3: Declive de subida em altitude de um aviao.Como se ve pela Fig. 7.34, a forca de traccao (ou empuxo) e dada pela equacao:
T =12
ρv2SCx (7.79)
e a forca de sustentacao e dada por
R =12
ρv2SCz. (7.80)
Ac componentes das forcas no eixo Ox e Oz (vertical), supondo a velocidade daaeronave uniforme, sao as seguintes, como se depreende da Fig. 7.34:
∑Fz = T sinθ −FD sinθ +Rcosθ −P = 0∑Fx = −T cosθ +FD cosθ +Rsinθ = 0⇒ T sinθ = FD sinθ −Rcosθ +P⇒ T cosθ = FD cosθ +Rsinθ ⇒ T = R tanθ +FD.
(7.81)
Temos portanto a seguinte equacao de equilıbrio da aeronave:
T = Rsinθ +12
ρv2SCx. (7.82)
Dividindo a Eq. 7.82 pelo peso, obtem-se:
TP= sinθ +
12 ρv2SCx
P, (7.83)
porque Rz = P. Isto significa que para fazer subir um aviao de peso P com umdeclive de altitude θ (medido em %) e necessario que a tracao gerada pelo motor (ahelice, com turbo-reactor ou motor foguetao,...) seja superior a forca de atrito (ouresistiva) na quantidade adicional Pθ .
Pode-se mostrar que a Eq. 7.83 se escreve tambem na forma:

132 7 Forcas
TP= θ +
Cx
Cz. (7.84)
pois que sinθ ≈ θ . Questao: Suponha que uma aeronave possui a eficieencia dasasas igual a 0.1 e que o racio tracao peso e de 0.3. Qual e o declive maximo que estapode atingir na ascencao?
0.3 = ϑ +0.1∴ ϑ = 0.2 (7.85)
isto e, pode subir com um declive maximo de 20 %, onde θ = sinθ , ou seja sobe de20 m cada 100 metros de percurso.

Chapter 8Trabalho e Energia
“Although nature commences with reason and ends in experience it is necessary for us todo the opposite, that is to commence with experience and from this to proceed to investigatethe reason’.
- Leonardo da Vinci
NOTA PREVIA - Grande parte da materia exposta constitui uma revisao e serarapidamente exposta na aula teorica. Os exemplos apresentados sao tıpicos proble-mas que o aluno deve rever em casa com atencao.
8.1 Trabalho e energia
As leis de Newton estabelecem uma relacao entre as forcas actuantes numa partıculae a aceleracao resultante, tornando possıvel predizer quais sao os futuros valores daposicao e da velocidade da partıcula (por integracao sucessiva).
Mas o movimento de sistemas mecanicos mais complexos nem sempre e sus-ceptıvel de uma analise baseada na variacao temporal do momento linear, tal comoo propos Isaac Newton. Gottfried Wilhelm von Leibniz argumentou que existia umaoutra quantidade fısica, a energia 1, cujos valores deveriam ser mınimos.
Assim, no desenvolvimento inicial da mecanica classica, co-existiam duas per-spectivas diferentes em como resolver os problemas da mecanica, tendo-se ambasdesenvolivdas de forma separada ate a actualidade: uma e a teoria das forcas vecto-riais e as condicoes para o seu equilıbrio; a outra trata da teoria escalar da energia,fundamentada na crenca que a Natureza requer que certas propriedades do movi-mento tenham um valor maximo ou um valor mınimo.
Veremos em seguida como relacionar a forca com o movimento da partıculaseguindo o segundo processo. Sabemos ja que o produto escalar da forca pelo deslo-
1 Na verdade, na altura chamavam-na por vis viva, um tipo de energia cinetica, definida como mv2
(faltando o factor 1/2).
133

134 8 Trabalho e Energia
camento define o trabalho e que o produto da massa pelo quadrado da velocidadeda partıcula define o dobro da energia cinetica.
Ao combinarmos trabalho com energia cinetica obtemos o princıpio trabalho- energia. Este princıpio desempenha um papel analogo ao da 2a lei de Newton,mas tem a vantagem das quantidades serem escalares.
• Princıpio trabalho-energia→ Conservacao da energia;• (Forca)×∆ t = impulso linear→ Conservacao do momentum• Forca × posicao→ Conservacao do momento angular.
As simetrias desempenham um papel fundamental na construcao das teoriasfısicas, nao esquecendo, porem, que a fısica e uma ciencia experimental e re-quer permanentemente a sua confrontacao com a experiencia. Existe um teoremamatematico que estabelece uma relacao entre a existencia (ou nao) de certas sime-trias na formulacao matematica da realidade fısica descrita pela teoria. As leis danatureza estao contrangidas pelas simetrias.
As simetrias em fısica referem-se aos aspectos de um sistema fısico que exibema propriedade de simetria, isto e, sob certas transformacoes ha aspectos desses sis-temas que nao sao modificados quando observados de determinado modo peculiar.A simetria de um sistema fısico e uma particularidade fısica ou matematica do sis-tema (que resulta da observacao, mas que tambem pode ser intrınseca) que e preser-vada sob determinada transformacao. As transformacoes podem ser contınuas (porexemplo, rotacao de um cırculo), ou discretas (por exemplo, reflexao de uma figurasimetrica bilateralmente, ou rotacao de um polıgono regular).
O teorema de Emmy Noether (Fig. 8.1) estabelece que para qualquer simetriacontınua de uma teoria fısica existe uma quantidade fısica que se conserva, que naovaria com o tempo.
Fig. 8.1 Emmy Noether (1882-1935) foi a primeira mulher a tornar-se numa matematica na Ale-manha, donde era natural. Ela teve que obter uma autorizacao especial para poder assistir as aulasna universidade e nao podia ensinar estudantes. Na verdade acabou por ensinar, mas usando onome do seu colega, e excepcional matematico, David Hilbert.
Table 8.1 Leis de conservacao e suas respectivas simetrias fısicas.
Momentum translacao no espacoEnergia translacao no tempo
Momentum angular invariancia por rotacaoCarga electrica desfasagem quanto-mecanica da fase1

8.1 Trabalho e energia 135
8.1.1 Trabalho a 1-dim
Uma forca Fx actuando sobre uma partıcula movendo-se ao longo de Ox realiza aquantidade de trabalho W :
W = Fx∆x, (8.1)
onde ∆x denota o deslocamento da partıcula. No Sistema SI a unidade fısica e oJoule (J).
• W > 0 : a forca e o deslocamento estao na mesma direccao (operador externoexercendo a forca);
• W < 0 : a forca e o deslocamento estao opostos;• W < 0 : representa o trabalho efectuado pela partıcula.
O trabalho depende do referencial onde e calculado, como se pode depreenderda fig. 8.2.
Fig. 8.2 O trabalho depende do referencial. (a) homem-aranha com bola no referencial do ele-vador: nao ha trabalho realizado. (b) homem-aranha visto do referencial (exterior) do laboratorio:ha trabalho realizado.
8.1.2 Forca variavel, trabalho
Vamos supor que a forca e uma funcao da posicao, Fx = Fx(x). A questao que noscolocamos neste momento e: qual e o trabalho realizado W (a→ b) ao deslocar-seuma partıcula de x = a para x = b?
Para o calcular o metodo consiste no seguinte: divide-se o deslocamento totalnum numero muito grande de pequenos intervalos ∆x. Para cada intervalo tem-se
∆Wi = Fx(xi)∆xi, (8.2)
que corresponde a area do rectangulo de altura Fx e largura ∆xi (Fig. 8.3).
Fig. 8.3 O deslocamento total de a para b e dividido em pequenos intervalos de largura ∆x.
O trabalho total efectuado ao deslocar-se a partıcula de a para b e a soma de todosos pequenos intervalos:
W = lim∆x→0 ∑i
Fx(xi)∆xi (8.3)
isto e,

136 8 Trabalho e Energia
W =∫ b
aFx(x)dx (8.4)
que representa um integral definido e onde Fx(x)dx representa o integrando. Otrabalho e igual a area delimitada pela curva Fx(x) e pelas linhas situadas em x = ae x = b.
Para determinadas formas do integrando f (x) a integracao de 8.4 pode ser feitaanaliticamente consultando uma tabela de integrais ou fazendo um desenvolvimentoem serie assimptotica. Porem, muitos integrais devem ser avaliados numericamentepois nao se conhece o seu valor ou sao muito complexos. Os metodos de integracaonumerica baseiam-se na interpretacao geometrica do integral da Eq. 8.4 como sendoa area delimitada pela curva de f (x) em funcao de x do ponto x = a ao ponto x = b.Como se ve na Fig. 8.3 divide-se o eixo Ox em n intervalos de largura ∆x, sendo ∆xdado por
∆x =b−a
n(8.5)
exn = x0 +n∆x, (8.6)
sendo xo = a e xn = b. O integral pode ser estimada usando a aproximacao rectan-gular, somando sobre todos os rectangulos mostrados na Fig. 8.3:
W =n−1
∑i=0
Fx(xi)∆x. (8.7)
Pode-se usar a aproximacao trapezoidal e obtendo um valor mais exacto do inte-gral. Aı terıamos:
W =
[12
Fx(x0)+n−1
∑i=1
Fx(xi)12
Fx(xn)
]∆x. (8.8)
Mostra-se um pequeno programa escrito em linguagem BASIC 2 na Tabela 8.1.2que implementa a aproximacao rectangular do integral de uma funcao f (x):
Exemplo 4: Forca de uma mola. Qual a quantidade de trabalho que e necessarioefectuar para mover a mola (fixa numa das extremidades) de x = a ate x = b?
F =−kx
W =∫ b
a F(x)dx =∫ b
a (−kx)dx= −kx2
2 |ba=− k
2 (b2−a2)
(8.9)
W < 0, isto e, realiza-se trabalho sobre a mola quando ela e distendida.
2 BASIC (Beginner’s All-purpose Symbolic Instruction Code) e uma linguagem desenvolvida pararesolver problemas simples. E usado em modo interactivo e e a linguagem mais usada em micro-processadores, em particular com fins educacionais ou de diversao.

8.1 Trabalho e energia 137
Table 8.2 Programa em linguagem BASIC para o integral na aproximacao rectangular. A funcaoa integrar neste exemplo e o coseno.
PROGRAM integralCALL inicial (a,b,h,n)CALL rectangulo (a,b,h,n,area)CALL output(area)END
SUB inicial (a,b,h,n)LET a=0 ! limite inferiorLET b=0.5*pi ! limite superiorINPUT prompt ”numero de intervalos=”:nLET h=(b-a)/n ! grelhaEND SUB
SUB rectangulo(a,b,h,n,area)DECLARE DEF fLET x=aFOR i=1 to n-1LET sum=sum + f(x)LET x=x+hNEXT iLET area=sum*hEND SUB
SUB output(area)PRINT using ”.”:areaEND SUB
DEF f(x)=cos(x)
8.1.3 Trabalho em 3-dim
Em geral,W = (
−→F ·∆−→r )
= F(∆r)cosθ(8.10)
Verifica-se de imediato que, quando−→F ⊥∆
−→r →W = 0.A projecao nas suas componentes resulta em
W = Fx(∆x)+Fy(∆y)+Fz(∆z). (8.11)
Se F = F(x) depende da posicao, entao o procedimento utilizado na Sec. 20.3.2pode ser empregue.

138 8 Trabalho e Energia
Temos
∆W =∫ P2
P1
−→F ·d−→r . (8.12)
que e um integral de linha. Decomposto nas suas componentes cartesianas temos
W =∫ P2
P1(Fxdx+Fydy+Fzdz)
=W =∫ P2
P1Fxdx+
∫ P2P1
Fydy+∫ P2
P1Fzdz
(8.13)
Exemplo 5: Forca gravitacional.Uma partıcula algures no sistema solar e atraıda por todas as outras do sistema
com uma forca−→F que varia em modulo e direcao de posicao para posicao. Portanto,−→
F e uma funcao vectorial dependente da posicao:
−→F = Fx
−→i +Fy
−→j +Fz
−→k . (8.14)
Este exemplo ilustra muito bem a ideia geral que se tem de um campo de forcas.A forca gravitacional na proximidade da superfıcie terrestre tem as seguintes
componentes cartesianas:Fx = 0Fy = 0
Fz =−mg(8.15)
W =∫ x2
x1
Fxdx+∫ y2
y1
Fydy+∫ z2
z1
Fzdz. (8.16)
W =∫ z2
z1
(−mg)dz =−mg(z2− z1) =−mg(∆z) (8.17)
onde ∆z representa a variacao em altura.Conclui-se que o trabalho efectuado pela gravidade depende da distancia vertical
entre dois pontos P1 e P2. E irrelevante o caminho (mais ou menos) complicado quelevou o objecto de massa m de um ponto ao outro; so interessa a distancia ∆z!
Exemplo 6: Um bloco e empurrado ao longo de um plano horizontal com ve-locidade constante. O coeficiente de friccao cinetico e µk. Qual o trabalho realizadoao exercer a forca F ao longo da distancia s?
F cosθ − f = 0−F sinθ +N−mg = 0 (8.18)
donde obtemosf = µkN = µk(F sinθ +mg) (8.19)
∴ F cosθ −µk(F sinθ +mg) = 0 (8.20)
∴ F =µkmg
cosθ −µk sinθ(8.21)
O trabalho e dado pelo produto

8.1 Trabalho e energia 139
Fig. 8.4 Bloco empurrado num plano horizontal a velocidade constante.
WF = (−→F ·d−→s ) (8.22)
porque F e constante, e finalmente
WF = Fscosθ =µkmgs
1−µk tanθ(8.23)
O resultado anterior possui uma singularidade quando µk tanθ = 1, i.e.,
tanθ =1µk⇒W → ∞.
Exemplo 7: Trabalho efectuado sobre um astronauta.Qual e o trabalho realizado pela forca da gravidade sobre um astronauta de 80 kg
ao desloca-lo do ponto A sobre a superfıcie terrestre ate ao ponto B a uma altitudede 2RT (RT e o raio terrestre).
−→F =−−GmT m
r2−→u r (8.24)
W =−∫ 3RT
RTGmT m
r2 dr∫ 1r2 dr =− 1
r(8.25)
W =+GmT m
r|3RTRT
= GmT m(
13RT− 1
RT
)=−2
3GmT m
RT=−2
3mgRT (8.26)
E realizado um trabalho de valor negativo porque a forca e dirigida na direcao docentro da Terra, mas o deslocamento e dirigido radialmente para fora da Terra.
W =−3.34×109J.
Podemos referir, como curiosidade, que em torno de dois corpos massivos su-jeitos ao campo gravıtico mutuo, existem 5 posicoes do espaco onde uma terceiramassa m3 mais pequena pode orbitar a distancia fixa de ambos. Sao chamadospontos de Lagrange porque foram descobertos pelo matematico franco-italianoJoseph-Louis Lagrange. Os Pontos de Lagrange sao pontos onde a resultante daatracao gravitacional exercida por ambos os corpos compensa exactamente a forcacentrıpeta necessaria para rodar com eles.
Dos 5 Pontos de Lagrange, 3 sao instaveis e 2 sao estaveis. Na Fig. 8.5 os pontosL1, L2 e L3 sao instaveis; os pontos L4 e L5 sao pontos estaveis.
O ponto L4 do sistema Terra-Sol permite colocar um satelite em permanenteobservacao do Sol e e onde se encontra actualmente “Solar and Heliospheric Ob-servatory Satellite” (SOHO). No ponto L5 do sistema Terra-Sol encontra-se a nave“WMAP” (e provavelmente no ano 2011 sera tambem aı colocado o “James WebbSpace Telescope”). Os pontos L1 e L2 sao instaveis numa escala de tempo de 23

140 8 Trabalho e Energia
dias mas, apesar disso, sao utilizados pelos satelites com frequencia, embora sendonecessario corrigir frequentemente a atitude do satelite (isto e, a orientacao doveıculo relativamente a um dado sistema de referencia). O ponto L3 nao tem sidoutilizado porque situa-se por detras do Sol. Apesar de ser um ponto instavel numaescala de tempo de 150 anos, tem sido referido nos escritos de ficcao cientıfica comoo ponto onde se encontra oculto o “Planet-X”.
Conhecem-se apesar de tudo a presenca de 2 satelites Trojanos 3 nos dois pontosde Lagrange L4 e L5 acima referidos do sistema Saturno-Luas de Saturno. Essessatelites Trojanos sao Telesto e Calypso.
Fig. 8.5 Na presenca de dois corpos massivos exercendo uma forca gravitacional mutua existem 5Pontos de Lagrange.
3 O termo Trojano aplica-se no sentido estrito aos asteroides que ocupam os pontos de Lagrange L4e L5 do sistema Sol-Jupiter. No sentido geral, designa tambem qualquer corpo situado nos pontosde Lagrange de qualquer sistema. Como curiosidade, refira-se que no sistema Terra-Lua nao existenenhum satelite nos pontos L4 e L5, embora parece aı acumular-se poeira cosmica.

Chapter 9Formas de Energia. Teorema Trabalho-EnergiaCinetica
The profit we possess after study is to have become better and wiser.
- Michel Eyquem de Montaigne (1533 1592) foi um dos escritores mais influentesdo Renascimento Frances
9.0.4 Energia cinetica
Vamos agora estabelecer uma relacao entre o trabalho 1 efectuado e a variacao darapidez das partıculas.
Considere uma partıcula em movimento de P1 para P2 sob a accao de uma forcaresultante
−→F (−→r ). O trabalho realizado e dado pela formula:
W =∫ P2
P1
−→F ·d−→r . (9.1)
A forca e uma grandeza vectorial, podendo nos escrevermos em coordenadas carte-sianas nesta forma: −→
F = Fx−→i +Fy
−→j +Fz
−→k , (9.2)
e, do mesmo modo, podemos escrever o vector deslocamento elementar:
d−→r = dx−→i +dy
−→j +dz
−→k . (9.3)
Resulta assim a expressao
1 Actio sequitur esse, isto e, a accao segue a essencia da natureza, era o que diziam os Antigos (istoe, aqueles que viveram antes da queda do Imperio Romano do Ocidente). A palavra “trabalho”vem do Latim, “tripalium”, que era como se chamava o tripe onde as mulheres se apoiavam paradar a luz os seus filhos, mas que tambem era usado como instrumento de tortura...
141

142 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
W =∫ P2
P1
(Fxdx+Fydy+Fzdz). (9.4)
Agora, note que a componente em x da forca e
Fx = max = mdvx
dt. (9.5)
Substituindo na formula da forca, tem-se∫ P2
P1
Fxdx =∫ P2
P1
mdvx
dtdx. (9.6)
Repare que vx e uma funcao da posicao:
dvx
dt=
dvx
dxdxdt
=dvx
dxvx (9.7)
Fig. 9.1 Uma partıcula move-se ao longo de uma trajectoria curvilınea do ponto P1 a P2 actuadapor uma forca F que varia em modulo e direcao.
- Teorema trabalho-energiaQuadroNegro 1 -

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 143
Chega-se, portanto ao resultado
W =12
mv22−
12
mv21, (9.8)
ondeK =
12
mv2, (9.9)
e a energia cinetica da partıcula e representa o potencial que uma partıcula possuipara realizar trabalho em virtude da sua velocidade.
Teorema do trabalho-energia: O trabalho efectuado sobre uma partıcula poruma forca resultante e igual a variacao da energia cinetica da partıcula:
W = K2−K1 = ∆K. (9.10)
Atendendo a que uma partıcula de massa m e velocidade v possui o momento linear−→p = m−→v , segue que
∴ K =p2
2m. (9.11)
Exemplo 1: Uma massa m e puxada para baixo ate a posicao xA e liberta depoisde lhe ser comunicada a velocidade inicial vo. Qual e a velocidade do bloco quandoeste atinge a posicao xB?
A forca total que actua sobre o bloco e
F = Fg−Fs = mg− kx (9.12)
O trabalho efectuado obtem-se integrando Fdx:
W (xA→ xB) =∫ xB
xA
Fdx =∫ xB
xA
(mg− kx)dx = (mgx− 12
kx2) |xBxA
(9.13)
W = mg(xB− xA)− 12 k(x2
B− x2A)
= 0.5×9.8(0.2−0.5)− 12 ×50(0.22−0.52)
=−1.47+5.25 = 3.78J.(9.14)
O teorema trabalho-energia, por sua vez, da-nos a relacao
W =12
mv2B−
12
mv2A,
∴ v2B = v2
A +2Wm
= [(−2.0)2 +2×3.78
0.5]⇒ vB =±4.37m/s.
Dados numericos: m = 0.50 kg, k = 50 N/m, xA = 0.50 m, xB = 0.20 m, vo = 2.0m/s.
Fig. 9.2 Massa m e puxada ate xA e liberta com uma velocidade inicial para cima vo.

144 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
Exemplo 2: Uma esfera de massa m encontra-se atada a extremidade de umacorda e posta a girar numa trajectoria circular no plano vertical. Qual e a velocidademınima vo que a esfera tem quando atinge o ponto mais baixo B sabendo-se queela atingiu previamente o ponto mais alto A com a corda no limite da tensao nula,T → 0.
Verifica-se neste problema (Fig. 9.3) que consideracoes meramente energeticassao insuficientes para resolver o problema, e necessario aplicar a 2a lei de Newton.
No topo da trajectoria a rapidez mınima corresponde ao limite da tensao nula dacorda, T → 0. Neste ponto a forca resultante e dirigida para baixo:
∑Fy = may
mg+T = m v2TR
∴ Fg = mg = m v2TR
(9.15)
Fig. 9.3 Esfera de massa m em movimento circular num plano vertical.
ou seja,
∴ v2T = gR
W (A→ B) = mgh = KB−KAmg(2R) = 1
2 mv2o− 1
2 mv2T
v2o = v2
T +4gR = gR+4gR = 5gR∴ vo =
√5gR.
Exemplo 3: Uma partıcula de massa m desliza pela curva da Fig. 9.4. Os pontossucessivos assinalados na Fig. 9.4 correspondem as seguintes cotas: hA = 7 m, hB =4 m, hc = 7.2 m, hD = −1 m, tendo no ponto A a rapidez vA = 3 m/s. Qual e arapidez da partıcula nos pontos x = xB, xC e xD?
A normal−→N nao realiza trabalho, (
−→N · d−→s = 0), portanto so a forca gravıtica
efectua trabalho sobre a partıcula (ou bloco).Calculemos primeiro o trabalho das forcas actuantes:
W (A→ B) =∫ B
A−→F ·d−→s =
∫ BA (−mg)dy
W = mg(hA−hB).(9.16)
Em seguida, usando o Teorema trabalho-energia, calculemos a velocidade
W = K2−K1 =12
mv2B−
12
mv2A (9.17)
obtem-se sem dificuldade:
∴ v2B = v2
A +2Wm = v2
A +2g(hA−hB)= 32 +2×9.8(hA−hB)
= 67.8(m/s)2
vB = 8.23m/s.
(9.18)

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 145
Uma questao adicional: ate que ponto acima de x= xD podera ir o bloco? Esse pontode altura hm sera atingido quando vm = 0.
Fig. 9.4 Bloco desliza sobre uma “montanha russa”.
0 = v2A +2g(hA−hm)
⇒ hm = hA +v2
A2g
∴ hm = 7.46m.
(9.19)
Exemplo 4: Uma viatura de massa m = 103 kg, sofre uma aceleracao de v1 = 20m/s para v2 = 30 m/s. Qual foi o trabalho realizado (por ex., forcas de traccao)?
W = 12 mv2
2−12 mv2
1= 1
2 m(v22− v2
1)= 1
2 ×1000× (900−400)= 2.5×105J.
(9.20)
9.0.5 Energia potencial gravıtica (ou gravitacional)
• K : representa a capacidade da partıcula efectuar trabalho em virtude da sua ve-locidade;
• U : representa a capacidade da partıcula efectuar trabalho em virtude da suaposicao no espaco (ou num campo de forcas).
Considere a accao da forca constante da gravidade Fz =−mg, sobre uma partıculaque se desloca da posicao de coordenadas (x1,y1,z1) ate (x2,y2,z2). O trabalhonecessario e dado por
Wg =∫ z2
z1
−→F ·d−→r =−
∫ z2z1
mgdz =−mg(z2− z1)
=−U(z2)+U(z1) =−∆U,(9.21)
ondeU(z) = mgz, (9.22)
e chamada a energia potencial gravitacional (ou gravıtica).
Fig. 9.5 Energia potencial gravitacional.
A variacao da energia potencial entre as duas posicoes z1 e z2 e o negativo dotrabalho efectuado pela gravidade sobre a partıcula.

146 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
Energia potencial gravıtica: E a capacidade que a partıcula tem em realizartrabalho em virtude da sua altura acima da superfıcie de uma massa atractiva (Terra).
Quando so actua a forca da gravidade, usando o teorema trabalho-energia, pode-se obter a expressao da energia mecanica total:
Wg = K2−K1Wg =U(z1)−U(z2)
∴ K1 +U(z1) = K2 +U(z2)(9.23)
∴ K +U(z)≡ constante do movimento (9.24)
A expressaoE = K +U(z) (9.25)
representa a energia mecanica do sistema e representa a capacidade total dapartıcula para realizar trabalho em virtude da sua velocidade e da sua posicao.
Se a unica forca actuante for a gravıtica, entao
E = K +U(z) =Const. (9.26)
A lei da conservacao da energia mecanica escreve-se assim:
E =12
mv2 +mgz =Const. (9.27)
Ve-se assim que, quando
• z aumenta⇒, v decresce;• z decresce⇒, v aumenta.
Considerando agora explicitamente duas posicoes distintas
12 mv2
1 +mgz1 =12 mv2
2 +mgz2v2
1 +2gz1 = v22 +2gz2
v22− v2
1 = 2g(z1− z2)=−2g(z2− z1)
(9.28)
9.0.6 Conservacao da energia na presenca da gravidade e deoutras forcas
Vamos supor agora que, alem da gravidade, outras forcas actuam sobre a partıcula,por exemplo, forcas de fricao, que sao forcas do tipo dissipativo. Designemos porWd o trabalho realizado por forcas de outra natureza, excluindo a gravıtica. Temos

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 147
W =Wg +Wd = K2−K1 = ∆KWd− (mgz2−mgz1) =
12 mv2
2−12 mv2
1Wd = ( 1
2 mv22−
12 mv2
1)+(mgz2−mgz1)= ∆K +∆U
(9.29)
que podemos tembem escrever na forma
Wd = ( 12 mv2
2 +mgz2)− ( 12 mv2
1 +mgz1)= E2−E1 = ∆E.
(9.30)
O trabalho efectuado por todas as outras forcas actuantes sobre a partıcula (comexcepcao da gravıtica) iguala a variacao da energia mecanica total da partıcula.
Em particular:
• Wd > 0⇒ energia mecanica total aumenta;• Wd < 0⇒ energia mecanica total decresce.
Exemplo 5: Um corpo de peso w e suportado por uma corda de comprimento R(Fig. 9.6). Uma forca horizontal variavel
−→P que comeca de zero e aumenta grad-
ualmente, empurra o corpo ate que este atinja o valor final θo. Qual e o trabalhorealizado pela forca
−→P ? Assuma que o corpo move-se com lentidao, K ≈ 0.
Fig. 9.6 Baloico.
As componentes da forca “propulsiva”−→P e do peso −→w sao:
(x) : P = T cosθ
(y) : w = T cosθ .(9.31)
Deduz-se que P = w tanθ . Logo, o trabalho e
W =∫ θ0
θ(−→P ·d−→s ) =
∫ θ00 Pcosθds = w
∫tanθ cosθdθ
W = wR∫ θ0
0 sinθdθ = wR[−cosθ ]θ00 = wR(1− cosθ),
(9.32)
pois que s = rθ . Verifica-se que W (θ0 = 0) = 0 e W (θ0 = π/2) = wR.Considerando que outras forcas (alem da gravidade) podem estar presentes, es-
crevemos:Wd =Wg +WT = ∆K +∆U = ∆E (9.33)
Mas WT = 0 porque−→T e perpendicular a trajectoria do movimento e ∆K = 0 porque
assumimos que o movimento e lento.
∴Wg = ∆U = w∆y∆y = l(1− cosθ)
Wg = wl(1− cosθ)(9.34)

148 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
Exemplo 6: Uma crianca desliza para baixo ao longo de um escorrega que eo quadrante de um cırculo (Fig. 9.7). Despreze o atrito e assuma que ela parte dorepouso. Qual e a velocidade com que chega ao solo?
Fig. 9.7 Crianca escorrega numa plataforma que e um quadrante de um cırculo.
O problema e um pouco mais complicado, porque nao podemos resolver comose fosse de aceleracao constante g, porque | −→a | varia ao longo do movimento. Aforca normal nao realiza aqui trabalho porque e ⊥ ao deslocamento, ∴Wd = 0. Seja1 o ponto de partida e 2 o ponto de chegada. Temos
K2 +U2 = K1 +U112 mv2
2 +0 = 0+mgR∴ v2 =
√2gR
(9.35)
Se R = 3.0 m, v2 =√
2×9.80×3.0 = 7.67 m/s.Questao: o que acontece se esta presente uma forca de atrito e v2 = 3.00 m/s?
Assuma m = 25 kg.Temos agora
Wd =WfWf = ( 1
2 mv22−
12 mv2
1)+(mgz2−mgz1)= ( 1
2 ×25×3.02−0)+(0−25×9.80×3.02) = 112−735 =−623J.(9.36)
Exemplo 7: Uma mola de constante elastica k = 10 N/m encontra-se presa emO sobre uma mesa horizontal sem atrito. Uma massa de 10 kg esta presa na outraextremidade livre e quando a mola esta relaxada a massa esta num ponto B. A molae esticada ate ao ponto A e depois liberta a partir do repouso descrevendo uma linharecta em direcao de O. Com que velocidade atinge o ponto B, distante 1 m de A?
A lei fundamental da dinamica da-nos
md2xdt2 =−kx (9.37)
onde x = l− lo e a diferenca de comprimento quando a mola esta relaxada (lo) equando esta sob tensao l.
Para integrar esta equacao convem aplicar o pequeno “truque” substituindo
d2xdt2 ⇔
dxdt
ddx
(dxdt
) = vdvdx
. (9.38)
Temos assimv
dvdx
=− km
x, (9.39)

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 149
e aindavdv =− k
m xdx(a)∫vdv =− k
m∫
xdx(b)v2
2 =− k2m x2 +C.(c)
(9.40)
Podemos ainda escrever:v2 = 2C− k
mx2, (9.41)
ou ainda, pondo C′ = 2C,v2 =C′− k
m x2
v =±√
C′− km x2 (9.42)
Questao: quanto tempo leva a massa a alcancar B?Como vimos
v =dxdt
=±√
1− km
x2. (9.43)
Como x diminui quanto t aumenta, v e negativo. Podemos escrever:
dxdt =−
√C′− k
m x2
dt =− dx√C′− k
m x2
dt =− dx√C′√
1− kmC′ x
2
(9.44)
Facamos a mudanca de variavel u =√
kmC′ x. A Eq. escreve-se agora numa forma
mais apropriada
dt =− 1√C′
√mC′
kdu√1−u2
t =−mk∫ du√
1−u2+C′′
t =−arcsinu+C′′
(9.45)
Na ultima expressao substituımos o valor numerico de modo a apresentar o integralna forma que se conhece em tabelas de integrais. A nova constante de integracao eobtida a partir das condicoes iniciais, x(t = 0) = 1:
0 =−arcsin1+C′′
∴C′′ = π
2 .(9.46)
Logot =−arcsinx+ π
2 = arccosx∴ x = cos t
t = arccos0 = π
2 = 1.57s(9.47)
A partıcula leva 1.57 s a atingir o ponto B.Podemos determinar a constante de integracao C, observando que no inıcio
quando a partıcula e liberta no ponto A, tem-se v = 0 m/s e x = 1 m. Logo

150 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
0 =− k2m × (1)2 +C
C = k2m × (1)2 ∴C = 1
2 .(9.48)
A Eq. 17.200-(c) fica
v2 = 1− km
x2, (9.49)
donde podemos obter a velocidade quando a massa atinge o ponto B (quando x=0!):
v2 |x=0= 1⇒ v |x=0= 1m/s. (9.50)
Exemplo 8: Determine a velocidade com que cai para a Terra um veıculo espacialprovindo do espaco interestelar. Considere a Terra em repouso e a acao unica daforca gravıtica. Suponha que o veıculo cai de um ponto A distante de r do centro daTerra. Faca um esboco do problema.
Vamos escrever a forca gravıtica na forma mais simplificada
F =λ
r2 . (9.51)
Como sabemos que F = mg quando r = RT (raio da Terra), tambem podemos escr-ever
mg = λ
R2T∴ λ = mgR2
T
F =mgR2
Tr2 .
(9.52)
A lei fundamental da dinamica toma a forma
md2rdt2 =−mgR2
Tr2 (9.53)
Logod2rdt2 =−gR2
Tr2 . (9.54)
A integracao desta equacao requer novo metodo: multiplicamos ambos os membrospor 2dr/dt. Fixe este “truque”...
2 drdt
d2rdt2 =− 2gR2
Tr2
drdt
ddt
( drdt
)2=− 2gr2
Tr2
drdt
d( dr
dt
)2=−2gR2
Tdrr2 .
(9.55)
Vamos agora integrar em relacao ao tempo t:
(drdt
)2 =−2gR2T
∫ drr2 =
2gR2T
r+C. (9.56)
Inicialmente em t = 0 temos dr/dt = 0 e sabemos que o veıculo se encontra distantede r = l do centro da Terra. Logo

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 151
0 =2gR2
Tl +C
C =− 2gR2T
l∴ ( dr
dt )2 = 2gR2
T( 1
r −1l
) (9.57)
Se l 1 pode ser desprezado e atendendo a que so a partir dos 50 km de altitude aatmosfera comeca a exercer um atrito nao desprezavel, concluımos que pelo menosate esta altitude o veıculo atinge a velocidade de v =
√2gRT ≈ 11.3 km/s. Sera esta
a ordem de grandeza da rapidez com que um asteroide cai sobre a Terra.Questao: qual e o tempo que leva a atingir a Terra?
drdt =−
√2gR2
Tl−rlr
dt =−√
l√2gR2
T
rdr√lr−r2
∴ t =−√
l√2gR2
T
∫ rdr√lr−r2
(9.58)
O resultado deste integral pode ser encontrado em tabelas de integrais, que aconsel-hamos o estudante a consultar 2. Encontra-se o seguinte:∫ rdr√
lr−r2=−√
lr− r2 + l2∫ dr√
lr−r2
=−√
lr− r2 + l2 arcsin 2r−l
l
∴ t =√
l√2gRT
[√lr− r2 + l
2 arcsin 2r−ll
]+K.
(9.59)
Atendendo a que em t = 0 temos r = l, entao podemos determinar agora a constantede integracao K:
0 =
√l√
2gRT
[0− l
2π
2
]+K. (9.60)
Finalmente,
t =
√l√
2gRT
[√lr− r2 +
l2
(π
2− arcsin
2r− ll
)]. (9.61)
9.0.7 Conservacao da energia
E usual definir o conceito de energia como a capacidade de realizar trabalhomecanico ou electrico. Na realidade, o conceito de energia e muito complexo. Apalavra energia provem da palavra grega energeia, que significa um sistema ouestado em accao. O seu uso no contexto cientıfico deve-se a Thomas Young, umcientista Britanico do sec. XIX, que o comecou a usar para descrever o conceito deenergia cinetica.
2 A edicao mais exclente que conheco e a de Gradshteyn, I.S. e Ryzhik, I.M. “Tables of Integrals,Series, and Products”, 6th ed. San Diego, CA: Academic Press, 2000

152 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
Introduzimos nas Secs. anteriores a lei da conservacao da energia mecanicaquando a partıcula se move sob a influencia da gravidade. Em muitos processosa soma da energia cinetica e potencial nao permanece constante porque existemforcas dissipativas, tal como a fricao.
A lei geral da conservacao da energia foi concebida para incluir outras formas deenergia:
• energia termica (e geotermica);• energia maremotriz (aproveitamento da energia das mares);• energia das ondas (as ondas do ocenao armazenam 3 TW de energia);• energia eolica (nos ventos que sopram sobra a Terra acumulam-se 2 700 TW);• energia hidraulica;• energia electrica;• energia solar (a energia solar media que chega a atmosfera terrestre e cerca de 1
353 KW/m2);• energia quımica;• energia nuclear.
O Princıpio da Conservacao da Energia determina que em qualquer sistema fısicofechado, isolado do ambiente, existe uma grandeza fısica chamada ”energia” quepermanece constante ao longo do tempo.
As mudancas nas outras formas de energia levam-nos a escrever a Lei daConservacao da Energia:
∆K +∆U +∆( todas as outras formas de energia) = 0. (9.62)
E um dos princıpios mais importantes da fısica. Enuncia-se assim:
A energia total de um sistema fechado nao aumenta nem diminui em qualquer processo.A energia pode ser transformada de uma forma para outra, e transferida de um corpo paraoutro, mas a sua quantidade total permanece constante.
A validade desta lei esta comprovada por observacoes experimentais. Enquanto quea leis de Newton falham ao nıvel microscopico, dos nucleos e atomos, a lei daconservacao da energia e sempre valida. E um dos grandes princıpios unificadoresda ciencia.
O seu estudo e uso e importante em Mecanica porque, enquanto a resolucaodas leis de Newton envolve grandezas vectoriais e suas projecoes nos eixos dascoordenadas, o uso das leis de conservacao:
• energia;• momentum;• momentum angular,
permite-nos obter as caracterısticas do movimento de um sistema e do seu movi-mento de um modo mais facil.

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 153
Exemplo 9: Uma embarcacao navega em aguas tranquilas com a rapidez de 3milhas por hora 3, quando desliga o motor. Determine o movimento subsequente daembarcacao.
Vamos admitir que a 2a lei de Newton escreve-se
mdvdt
=−av (9.63)
donde obtemosdt =−m
advv
t = ma ln vo
v(9.64)
onde vo e a velocidade inicial. Para resolver a ultima das Eqs. 17.204, note que
atm
= lnvo
v(9.65)
ouexp(at
m
)=
vo
v(9.66)
donde se obtemv(t) = vo exp
(−at
m
). (9.67)
Note en passant que a embarcacao ao ver a sua velocidade reduzida, podera pas-sar a ter um movimento de deriva lateral e a aproximacao usada nao e mais valida,devendo-se usar um valor diferente para a (que o estudantye de engenharia apren-dera em nıveis mais adiantados do curso).
Questao: qual a distancia percorrida?Parte-se de
mvdvds
=−av (9.68)
e, consequentemente,v = vo−
am
s. (9.69)
Integrando-se a Eq. 17.207, tem-se
dsdt
= vo exp(−at
m
)(9.70)
s =mvo
a(1− exp
(−at
m
)). (9.71)
E espantoso, mas um petroleiro necessita em media de cerca de 10 km ate pararcompletamente!
3 Isto e, cerca de 5 km/h.

154 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
9.0.7.1 Energia e desenvolvimento
A energia foi ao longo da historia um factor fundamental no desenvolvimentoeconomico e social dos povos. Sabemos que qualquer actividade implica dissipacaode energia. Desde o perıodo historico em que a humanidade usava a traccao animalpara cultivar a terra ate ao actual uso da fissao nuclear em centrais geradoras de en-ergia, a historia da energia e indissociavel da historia da humanidade. A utilizacaodo carbono em larga escala, a invencao da locomotiva a vapor, os progressos daquımica e da siderurgia, estao na base da primeira revolucao industrial, que trans-formou as sociedades essencialmente agrarias na Europa e na America do Norte,em sociedades industriais guiadas pela tecnologia.
9.0.8 Forcas conservativas
Na presenca do campo gravıtico a equacao de conservacao e a seguinte:
E = K +U(z). (9.72)
Quais sao as condicoes necessarias e suficientes para que uma forca conservativaexista?
Considere uma partıcula que se desloca de P1 para P2 sob a atuacao de umaforca
−→F . Assuma que a forca depende unicamente da posicao, mas nao depende
explicitamente do tempo.O trabalho exercido pela forca quando a partıcula desloca-se ao longo do per-
curso I e:
W I12 =
∫ P2
P1
−→F ·d−→r , (9.73)
enquanto que o trabalho efectuado sobre a partıcula quando ela se desloca ao longodo percurso II e:
W II12 =
∫ P2
P1
−→F ·d−→r . (9.74)
Definicao: −→F e uma forca conservativa se o trabalho depende apenas da posicaodos pontos P1 e P2, mas e independente dos percursos efectuados entre P1 e P2:
W I12 =W II
12, (9.75)
para quaisquer que sejam os dois trajectos.
Fig. 9.8 Forcas conservativas.

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 155
Imagine agora que a partıcula efectua um percurso fechado, tal como mostra aFig. ??. Se a forca for conservativa o trabalho total e exactamente igual a zero paraum trajecto fechado:
Fig. 9.9 Trajecto da partıcula ao longo de um percurso fechado de P1 a P2.
W I12 +W II
21 =W I12−W II
12 = 0. (9.76)∫ P2
P1
−→F ·d−→r +
∫ P1
P2
−→F ·d−→r =
∫ P2
P1
−→F ·d−→r −
∫ P2
P1
−→F ·d−→r = 0, (9.77)
resultado que se pode escrever de forma condensada assim∮γ
−→F ·d−→r = 0. (9.78)
Este e um integral de linha em torno de uma curva fechada. De acordo com oTeorema de Stokes ∮
γ
(−→F ·d−→r ) =
∫ ∫rot−→F ·d−→S . (9.79)
Pode-se verificar que a forca gravıtica e a forca elastica sao ambas forcas conser-vativas.
A forca de atrito nao e conservativa porque opoe-se ao movimento:∮ −→F ·d−→r 6= 0. (9.80)
O trabalho exercido contra uma forca de atrito nao e recuperavel, e dissipadosob a forma de calor ou noutra forma de energia. O trabalho das forcas dissipativasdependem tambem do comprimento do trajecto e nao apenas dos pontos extremos.
Exemplo 10: [Problema muito avancado] Quando duas correntes electricas par-alelas tem o mesmo sentido elas atraem-se. Do mesmo modo, uma carga electricapositiva movendo-se paralelamente a um fio longo portador de corrente electrica Isera atraıda para o fio.
a) Escreva a equacao do movimento e as componentes da aceleracao em coorde-nadas cilindricas. Sabe-se que o campo magnetico e azimutal e tem a forma
−→B =
µ0I2πr−→u θ . (9.81)
SOL.:
−→a = qm [−→v ×−→B ]
−→a = (r− rθ 2)−→u r +(rθ +2rθ)−→u θ + z−→u z.(9.82)

156 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
b) Obtenha as componentes r, θ e z do movimento. Por conveniencia defina opara mtero α = µ0Iq
2πm .SOL.:A componente em z integra-se para obter-se
z = zo +α ln(
rro
). (9.83)
A componente θ integra-se, obtendo-se
θ =
√β
r2 (9.84)
onde β = (l/m)2. O momento angular e aqui introduzido porque a partıcula aorodar em torno do fio vai adquirir momento em torno do eixo z. Substituindo-se naequac˜ao em r podemos reescrver o resultado na forma
ddr
[12
r2 +Ve f f (r)] = 0, (9.85)
onde se introduziu um “potencial efectivo”:
Ve f f (r) =β
2r2 +α2
2[ln(
rro
)]2 +α zo ln
(rro
). (9.86)
c) Suponha que ro e uma distancia de equilıbrio e desenvolva a funcao logarit-mica em torno desse ponto. Mostre que se obtem:
Ve f f (r) =β
2r2o+(α zo−
β
r2o)
(r− ro
ro
)+
(α2
2− α zo
2+
3β
2r2o
)(r− ro
ro
)2
. (9.87)
d) Elimine o termo linear da Eq. anterior e mostre que ro =√
β
α zo.
9.0.9 Energia potencial das forcas conservativas
A energia potencial so pode ser definida para forcas conservativas. E convenienteescolher-se um ponto de referencia Po ao qual e atribuıdo um determinado valorU(Po), qualquer numero arbitrario de facto, embora com mais frequencia seja con-veniente escolher U(Po)≡ 0.
Deste modo, qualquer outro ponto P situado num campo de forcas determinado,tem a energia potencial dada pela expressao geral:
U(P) =U(Po)−∫ P
Po
−→F ·d−→r . (9.88)

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 157
Podemos tambem escrever:
U(P2)−U(P1) =−∫ P2
P1
−→F ·d−→r . (9.89)
Vimos previamente que a variacao da energia cinetica da partıcula iguala o tra-balho efectuado:
K2−K1 =W =∫ P2
P1
−→F ·d−→r . (9.90)
Logo, para qualquer forca conservativa deve-se verificar
K2−K1 =U(P1)−U(P2)K2 +U(P2) = K1 +U(P1)
E = K +U =Const.(9.91)
onde E designa a energia mecanica total.Exemplo 11: Energia potencial gravıtica (na proximidade da Terra).
−→F =−mg
−→k . (9.92)
U(P) =−∫ P
Po
−→F ·d−→r +U(Po). (9.93)
Assumindo U(Po) = 0 para as coordenadas (x = 0,y = 0,z = 0):
U(P) =−∫ x
0 Fxdx−∫ y
0 Fydy−∫ z
0 Fzdz=−
∫ z0 Fzdz =−
∫ z0 (−mg)dz, (9.94)
ou sejaU(z) = mgz. (9.95)
A energia mecanica total e
E = K +U =12
mv2 +mgz. (9.96)
9.0.10 Energia potencial de uma mola
Comecemos por escolher o nosso ponto de referencia em Po quando a mola estarelaxada, x = 0:
U(Po) = 0.U(x) =−
∫ x0 Fx(x)dx
=−∫ x
0 (−kx)dxU(x) = 1
2 kx2.
(9.97)
A energia mecanica total para o sistema massa-mola e (Vd. Fig. 9.10):

158 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
E = K +U =12
mv2 +12
kx2. (9.98)
Fig. 9.10 (a) : Forca elastica no sistema massa-mola. (b) : Energia potencial vs. x.
9.0.11 Forca gravitacional
−→F g =−
GmMr2−→u r (9.99)
QuadroNegro 3 -

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 159
Obtem-se portanto a expressao da energia potencial gravıtica:
U(r) =−GmMr
(9.100)
sendo a energia mecanica total dada por
E = K +U =12
mv2− GmMr
. (9.101)
9.0.12 Sobreposicao de forcas
Quando diversas forcas (conservativas)−→F i actuam no objecto, entao temos
Wtot =∫ −→
F R ·d−→r , (9.102)
onde a forca resultante−→F R e dada pelo somatorio das forcas:
−→F R =
N
∑i=1
−→F i. (9.103)
Decorre deste resultado que a energia potencial total sera dado pela soma de cadauma delas individualmente:
U =N
∑i=1
Ui. (9.104)
A energia mecanica total entre dois estados do sistema fısico inicial ≡ i e finalf inal ≡ f e conservada:
Ki +N
∑j=1
U j = K f +N
∑j=1
U f = E. (9.105)
Exemplo 12: Uma massa m e deixada cair a partir do repouso sobre uma mola(Fig. 9.11). Determine a compressao maxima da mola.
Repare que so se encotram aplicadas forcas conservativas sobre o sistema massa-mola:
E = K +U =Const. (9.106)
Quando e deixada cair a massa parte do repouso, v1 = 0⇒ K1 = 0. No instantede compressao maxima da mola a massa encontra-se em repouso, K2 = 0. Logo

160 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
K1 +U1 = K2 +U20+mgh = 0−mg(y)+ 1
2 ky2
y2− 2mgk y− 2mg
k h = 0
y = 12
[2mg
k ±√
( 2mgk )2 + 8mg
k
].
(9.107)
Na ultima expressao, o sinal + e o que tem significado fısico. Faca a aplicacaonumerica para os seguintes valores: m = 2.6 kg, k = 72 N/m, h = 0.55 m.
Fig. 9.11 Uma massa m cai em cima de uma mola.
Exemplo 13: Pendulo invertidoUm pendulo consiste numa haste rıgida leve de comprimento l girando numa das
extremidades e tendo na outra uma massa m. O pendulo e largado do repouso de umangulo φo, como mostra a Fig. 9.12. Qual e a velocidade de m quando a haste fazum angulo φ com a vertical?
Fig. 9.12 Pendulo invertido.
O teorema trabalho-energia conduz-nos a
∆K =W (φo→ φ)12 mv(φ)2− 1
2 mv2o =W
(9.108)
logo
v(φ) =
√2Wm
. (9.109)
Agora temos que calcular o trabalho. Repare-se no diagrama de forcas mostrado naFig. 9.12-(b). Duas forcas encontra-se actuando sobre a massa m,
−→N e m−→g . Como
se ve−→N ⊥ d−→r e, portanto nao realiza trabalho. Resta-nos o trabalho do campo
gravıtico:m−→g ·d−→r = mgl cos
(φ − π
2
)dφ .
= mgl sinφdφ(9.110)
onde usamos | d−→r |= ldφ .
Wφ ,φo =∫ φ
φomgl sinφdφ
=−mgl cosφ |φφo
= mgl(cosφo− cosφ)
(9.111)
Logo, a velocidade (ou melhor, a rapidez) atingida quando a massa m esta em φ e
v(φ) =√
2gl(cosφo− cosφ). (9.112)

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 161
A velocidade maxima e atingida quando o pendulo cai do topo φo = 0 ate ao pontomais baixo φ = π:
vmax = 2√
gl. (9.113)
Exemplo 14: Energia e estabilidade do “teeter toy”.O “teeter toy” consiste em dois pesos identicos pendurados em hastes inclinadas
que se apoiam num ponto, como mostra a Fig. 9.13. A configuracao e bastanteestavel e o porque pode ser compreendido vendo a curva da energia de potencial.Calcule a energia potencial quando o brinquedo faz um angulo θ com a vertical, talcomo mostra a Fig. 9.13-(b). Arbitre uma energia potencial nula quando θ = 0.
QuadroNegro 4 -
Fig. 9.13 (a) : O “Teeter toy” na posicao de equilıbrio; (b) : ligeiro desvio da posicao de equilıbrio.

162 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
O esboco da funcao energia potencial torna a ideia de estabilidade quase obvia.O mınimo da curva de energia potencial e um ponto de equilıbrio, e o maximo eum ponto de equilıbrio instavel. Podemos “testar” a estabilidade do equilıbrio de-terminando quando U tem um maximo ou um mınimo num ponto xo. Temos apenasque examinar a derivada segunda, d2U/dx2 em xo. Se a derivada segunda e positivanesse ponto xo o equilıbrio e estavel; se for negativa, o equilıbrio e instavel. Se Ufor constante em redor de xo diz-se que o sistema esta em equilıbrio neutro.
Fig. 9.14 Condicoes de estabilidade de um sistema fısico.
9.0.13 Exercıcios suplementares de revisao
Exemplo 15: Um comboio faz uma curva de 300 m de raio com a rapidez de 50km/h. De quanto deve ser elevado o carril externo de modo a que as rodas exercamigual pressao sobre ambos os carris? Assuma que os carris estao calibrados deacordo com o standard gauge 1435 mm.
Se colocarem um fio de prumo no vagao e este nao oscilar, entao ele devera fazerum angulo recto com o eixo das rodas. O comboio descrevera uma trajectoria circu-lar no espaco sob a acao de 2 forcas: a gravıtica, m−→g e a tensao da corda
−→T . Suponha
que o fio de prumo faz um angulo α com a vertical. Nestas condicoes a componentevertical de
−→T equilibra a forca gravıtica (pois que nao existe movimento vertical do
fio de prumo). Logo
T sinα = N =mv2
r,
logo,
tanα =v2
gr=
142
9.8×300= 0.067
Fig. 9.15 Comboio num trilho de 300 metros de raio e a 50 km/h.
Da 3.8 o, e portanto o carril mais externo devera assentar cerca de 4.7 cm acimado carril mais interno de modo a que a pressao sobre ambos os carris seja igual.
Exemplo 16: Vaso de centrifugacao.Este dispositivo e usado com frequencia em quımica, mas foi em tempos us-
ado para determinar a velocidade de uma locomotiva...com uma velocidade angularproporcional a rapidez do trem (Fig. 9.16).
Suponha que se tratava de um oleo movendo-se como se tratasse de um corporıgido, sem correntes transversais ou outras perturbacoes internas. Qual sera a forma

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 163
da superfıcie? Imagine para este fim uma pequena partıcula na superfıcie do oleo.Ela sera actuada pela forca gravıtica, m−→g e pela impulsao de Arquimedes
−→I . A re-
sultante destas duas forcas deve igualar a forca centrıfuga−→N necessaria para manter
a partıcula na sua trajectoria.
Fig. 9.16 O vaso centrıfugo.
Temos entao por um lado:N = mω
2x. (9.114)
Por outro lado, repare que o declive da curva e determinada pelo tangente normal a−→I :
I cosθ = mgI sinθ = N (9.115)
donde se obtem
tanθ =ω2x
g(9.116)
outanθ = ω2
g x
∴ dydx = ω2
g x(9.117)
Daqui obtem-se:
y =ω2
2gx2. (9.118)
A superfıcie livre do oleo (ou de qualquer fluido em geral) e uma paraboladerevolucao. Em particular, podemos concluir que a altura maxima atingida pelolıquido e dada em funcao do raio do vaso R:
h =ω2
4gR2. (9.119)
Exemplo 17: Operacao do rotor de um helicoptero em condicoes de fluxooblıqua.
Todos os sistemas de rotor estao sujeitos a` assimetria da forca de sustentacaonum voo para a frente. Quando o helicoptero paira no ar, a forca de sustentacao eigual sobre todo o disco do rotor. Porem, quando o helicoptero ganha velocidade, apa do rotor que avanca desenvolve uma sustentacao maior devido a velocidade maiordo ar (por exemplo, se as pas do rotor quando estao paradas movem-se a 100 km/h,quando o heli move-se a 100 km/ para a frente a pa que avanca tera a velocidadede 200 km/h, enquanto que a pa que se desloca para tras tera a velocidade relativade 0 km/h... Este efeito da dissemetria da forca de sustentacao e compensado pelo“blade flapping”. O angulo de ataque das pas do rotor (que sao na realidade asas)e modificado de modo a compensar o aumento da sustentacao da pa que avanca e

164 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
reduzindo na pa que retrai. Se este efeito nao e corrigido o helicoptero e submetidoa grandes vibracoes que comprometem a durabilidade do rotor.
Fig. 9.17 Assimetria do rotor.
Exemplo 18: Pendulo simples.
U(θ) = mgL(1− cosθ)E = K +U
= 12 mv2 +mgL(1− cosθ)
(9.120)
No angulo maximo θ = θo e v = 0
∴ Eo = mgL(1− cosθo) (9.121)
LogomgL(1− cosθo) =
12 mv2 +mgL(1− cosθ)
v2 = 2gL(cosθ − cosθo)(9.122)
Na parte inferior, θ = 0:vB =
√2gL(1− cosθo) (9.123)
Fig. 9.18 Pendulo simples.
9.0.14 Forcas nao-conservativas
Quando forcas nao-conservativas actuam sobre um objecto, a variacao da energiapotencial U e energia cinetica K e igual ao trabalho efectuado pela forca de fricao:
∆K +∆U =Wf . (9.124)
• ∆K : variacao da energia cinetica;• ∆U : variacao da energia potencial;• Wf : trabalho efectuado pela forca de fricao.
Se tivermosE1 = K1 +U1E2 = K2 +U2(E2−E1) =Wf
(9.125)
ou

9 Formas de Energia. Teorema Trabalho-Energia Cinetica 165[12
mv22 +U(x2)
]−[
12
mv21 +U(x1)
]=∫ x2
x1
f dx (9.126)
Exemplo 19: Considere o sistema massa-mola da Fig. 9.19. A massa m e lib-ertada de x = xA com vA = 0 quando a mola esta esticada. Qual e a velocidade vBquando x = xB?
A forca de fricao e f = µkN = µkmg. O trabalho efectuado pela forca de fricao e
Wf =∫ xB
xA
−→f ·d−→x =+µkmg(xB− xA) =−0.245J. (9.127)
Pelo princıpio de conservacao da energia:[12
mv2B +
12
kx2B
]−[
12
mv2A +
12
kx2A
]= µkmg(xB− xA) (9.128)
12 mv2
B = 12 k(x2
A− x2B)+µkmg(xB− xA)
= 12 ×50(.32−0.052)−0.245
∴ vB = 2.788m/s.(9.129)
9.0.15 Relacao entre forca e energia potencial
Uma forca conservativa verifica sempre a relacao seguinte:
U(P1)−U(Po) =−∫ P1
Po
−→F ·d−→r . (9.130)
Inversamente, supondo que os dois pontos Po e P1 encontram-se separados por umadistancia infinitesimal d−→r , diferenciando a expressao para U(P1):
dU =U(P1)−U(Po) =−−→F ·d−→r
=−Fxdx−Fydy−Fzdz.(9.131)
Se assumirmos que o deslocamento realiza-se ao longo de Ox, entao podemos pordy = 0 e dz = 0, ficando so
dU =−Fxdx (9.132)
ouFx =−
dUdx|y,z . (9.133)
Podemos definir um tipo novo de derivada a que chamaremos derivada parcial deU em relacao a uma dada variavel x, y e z:
Fx =− ∂U∂x
Fy =− ∂U∂y
Fz =− ∂U∂ z
(9.134)

166 9 Formas de Energia. Teorema Trabalho-Energia Cinetica
Combinando temos −→F =−
(∂U∂x−→i + ∂U
∂y−→j + ∂U
∂ z
)−→F =−∇U
(9.135)
O sımbolo ∇ representa o operador diferencial vectorial. Podemos escrever o oper-ador del no sistema de coordenadas cartesianas:
∇ =∂
∂x−→i +
∂U∂y−→j +
∂
∂ z−→k , (9.136)
onde−→i ,−→j e−→k constituem a base em R3.
Exemplo 20: Forca elastica.A energia potencial da mola e dada por:
U(x) =12
kx2. (9.137)
Obtem-se facilmente:Fx =− ∂U
∂x =−kxFy =− ∂U
∂y = 0Fz =− ∂U
∂ z = 0.(9.138)
Fig. 9.19 Energia potencial U de um sistema massa-mola vs. x. Quando a mola e comprimida,x < 0 o declive da curva e negativo e a forca positiva; quando a mola e esticada, x > 0, o declive epositivo e a forca negativa.
Exemplo 21: Seja a funcao potencial
U(x) =− axb2+x2
F(x) =− ∂U(x)∂x
(9.139)
QuadroNegro 5 -

Chapter 10Equilıbrio e Estabilidade de um Sistema Fısico
“A careful analysis of the process of observation in atomic physics has shown that thesubatomic particles have no meaning as isolated entities, but can only be understood asinterconnections between the preparation of an experiment and the subsequent measure-ment. Quantum theory thus reveals a basic oneness of the universe. It shows that we cannotdecompose the world into independently existing smallest units. As we penetrate into mat-ter, nature does not show us any isolated basic building blocks, but rather appears as acomplicated web of relations between the various parts of the whole.”
- Fritjof Capra, in “The Tao of Physics”
10.1 Curvas de energia
Suponhamos que e conhecida a curva da energia potencial de uma partıcula quese move unidimensionalmente. Qual e a descricao do movimento da partıcula emfuncao do tempo, x(t)?
Comecemos por estudar o caso das forcas conservativas. A energia mecanicatotal e uma constante do movimento:
E = K +U =Const.= 1
2 mv2 +U(x)= 1
2 m( dx
dt
)2+U(x)
(10.1)
Comecemos por resolver as Eqs. 10.1 em ordem a vx:
vx =dxdt
=
√2m[E−U(x)]. (10.2)
Separando as variaveis semelhantes para cada um dos lados da equacao, temos
167

168 10 Equilıbrio e Estabilidade de um Sistema Fısico∫ x
x′=xo
dx′√2m [E−U(x′)]
=∫ t
t ′=0dt ′, (10.3)
onde x′ = xo quando t ′ = 0.Como podemos depreender, o integral da Eq. 10.3 nao e necessariamente de
obtencao analıtica facil. Coloca-se entao a seguinte questao: sera que olhando o di-agrama da energia potencial podemos extrair conclusoes gerais sobre o movimentoda partıcula?
Exemplo 1: O potencial (a 1-dim) de uma partıcula alfa α na proximidade deum nucleo de ouro de raio rB ∼ 10−13 cm tem a forma apresentada na Fig. 10.1.
Fig. 10.1 Curva da energia potencial de uma partıcula α em funcao de x na proximidade de umnucleo de ouro.
F =−∂U(x)∂x
1. Nos pontos xB e xD, ∂U/∂x = 0 e, portanto F(x) = 0;2. Se ∂U(x)/∂x→ 0 quando x→ ∞, entao F(x)→ 0 quando x→ ∞.3. F(x)> 0 no intervalo 0 < x < xB, porque ∂U/∂x < 0. Tambem no intervalo x >
xD, tal se verifica. Portanto, conclui-se que nestes intervalos a forca e repulsiva.4. F(x) < 0 no intervalo xB < x < xD, porque o declive de U(x) e positivo: a forca
neste intervalo e atractiva (no sentido da origem).
Este exemplo sugere-nos um metodo util para podermos interpretar outras curvasde potencial: imagine uma esfera a rolar entre as “colinas” da curva de potencialsujeita a forca da gravidade. A esfera e empurrada na direccao de F(x).
Exemplo 2: Sistema massa-mola (Fig. 10.2): Uma massa e puxada para a direitaate a posicao x = xo e liberta com velocidade inicial nula. Supostamente nao hadissipacao de energia. A energia total inicial permanece constante:
E = 12 kx2
o∴ 1
2 mv2 + 12 kx2 = 1
2 kx2o.
(10.4)
Quando:i) x > 0, verifica-se ∂U(x)/∂x = kx > 0, logo F < 0, e a forca e atractiva
acelerando a massa em direccao a posicao de equilıbrio.ii) x < 0, ∂U(x)/∂x = kx < 0, F > 0 e a forca e igualmente atractiva, acelerando
a massa em direccao a posicao de equilıbrio.
Fig. 10.2 (a) : curva da energia potencial U =U(x); (b) : sistema massa-mola.
iii) x = 0, tem-se ∂U(x)/∂x = 0⇒ F = 0.

10.1 Curvas de energia 169
Depreendemos do grafico da energia potencial U(x) vs. alongamento (x) que apartıcula move-se entre pontos de retorno 1 cujos limites sao definidos pela energiatotal E. Quando a energia E do sistema aumenta tambem aumenta a amplitude dasoscilacoes nesse sistema. O movimento e sempre confinado.
Exemplo 3: Na Fig. 10.3 mostra-se um grafico possıvel da energia potencial deum objecto constrangido a um movimento a 1 dimensao.
Consideremos agora o movimento de uma partıcula podendo possuir diferentesvalores da energia E = Eo, E1, E2 e E4. Ja vimos que para um sistema conservativo(como e o caso aqui considerado) o valor da energia depende das condicoes daenergia:
vx =
√2m(E−U(x)). (10.5)
Tem que se verificar necessariamente U(x) < E, de outro modo a velocidade se-ria imaginaria. Agora verifiquemos o que se podera passar em diferentes casospossıveis:
1. E = Eo : a partıcula permanece fixa na posicao x = xo. E um ponto de equilıbrio.A partıcula encontra-se aqui no ponto mais baixo do “vale”.
2. E = E1 : a partıcula oscilara para a frente e para tras entre os pontos x1 e x′1. Asua energia cinetica em qualquer ponto e dada pela diferenca entre E1 e U(x). Separtir de x1 a partıcula mover-se-a para a direita (porque F(x) > 0) aumentandoa sua velocidade (de acordo com a Eq. 10.5) ate ao ponto xo. A partir daquicontinuara o seu movimento para a direita com velocidade decrescente ate x′1,parando aı e regressando no movimento de retorno ata ao ponto x1. Os pontos(x1, x′1) sao pontos de retorno e o movimento esta constrangido; diz-se que apartıcula encontra-se aprisionada num poco de potencial.
3. E = E2 : com esta energia a partıcula pode mover-se em qualquer um dos dois“pocos de potencial” acessıveis, dependendo para isso das suas condicoes inici-ais 2.
4. E =E4 : a partıcula possui um unico ponto de retorno em x4 com U(x)<E4, ∀x>x4. Uma partıcula que se move para a esquerda do grafico varia em velocidadeconforme vai atravessando os “vales”, revertendo o seu movimento em x = x4. Apartir deste unico ponto de retorno, a partıcula move-se indefenidamente quandox > x4. O movimento e ilimitado.
Fig. 10.3 Representacao grafica da energia potencial U(x) de uma partıcula num movimento con-stangido a 1 dimensao.
1 Em ingles, “turning points”.2 Refira-se que em Mecanica Quantica, a partıcula pode passar de um “vale” para outro numprocesso chamado quantum tunnelling, ou tunelamento quantico, interdito no ambito da fısicaclassica.

170 10 Equilıbrio e Estabilidade de um Sistema Fısico
10.2 Equilıbrio
Ainda referindo-nos a Fig. 10.3 verificamos o seguinte:
• x = xo : A forca em ambos os lados de xo actua sobre a partıcula de modo atraze-la de volta a xo. Diz-se que o equilıbrio e estavel.
• x = xP : a forca actua a partıcula afastando-a de x = xP. Diz-se que o equilıbrioe instavel.
10.2.1 Equilıbrio e estabilidade
Para determinar se um ponto de equilıbrio e estavel ou instavel, examina-se o sinalde d2U(x)/dx2.
Se num dado ponto do espaco (onde se encontra um campo de forcas com poten-cial U) verificar-se que:
• d2U/dx2 > 0 : mınimo do potencial = equilıbrio estavel.• d2U/dx2 < 0 : maximo de potencial = equilıbrio instavel.• d2U/dx2 = 0 : U e constante dentro de uma determinada regiao do espaco.
Verifica-se igualmente que F = 0. Equilıbrio neutro.
E o que se procura ilustrar na Fig. 10.4.
Fig. 10.4 Os pontos A, B, C e D no grafico da energia potencial em funcao da posicao sao pontosde equilıbrio. O equilıbrio pode caracterizar-se como estavel (A), instavel (B), ou neutro (D).
Um grafico como aquele onde assenta o ponto B e instavel porque a forca que agesobre um objecto que se encontre nesse ponto afasta-o permanentemente da posicaox = xB.
Exemplo 4: Pendulo simples constituıdo por uma massa m e uma haste de com-primento L. Determine os pontos de equilıbrio estavel e instavel.
A energia potencial da massa m e
U(θ) = mgL(1− cosθ) (10.6)
Como se ve na Fig. 10.5, a massa m possui a energia potencial
U(θ) = mgL(1− cosθ) (10.7)
Derivando em ordem a θ de modo a estudar o equilıbrio do sistema tem-se
dUdθ
= mgLsinθ
d2Udθ 2 =+mgLcosθ .
(10.8)
10.2 Equilıbrio 171
Conclui-se que dU/dθ = 0 para θ = 0,π , mas a derivada segunda mostra que paraθ = 0, U ′′ > 0, sendo o equilıbrio estavel e,para θ = π , tem-se U ′′ < 0, sendoportanto o equilıbrio instavel.
Fig. 10.5 Pendulo simples constituıdo por uma massa m e haste de comprimento L.
Exemplo 5: Molecula diatomica. A forca entre os atomos de uma moleculadiatomica tem a sua origem fısica na interacao entre os electroes e o nucleo decada atomo. O potencial de Lennard-Jones
U(r) =Uo
[(ar
)12−(a
r
)6]
(10.9)
descreve com uma boa aproximacao este tipo de interacao.
• r : distancia entre os atomos;• Uo, a : constantes diatomicas que podem ser extraıdas de uma tabela ou base de
dados;• Por exemplo, para o O2: Uo = 5.6×10−21 J, a = 3.5×10−10 m.
F =− dUdr
=−Uo
[−12 a12
r13 +6 a6
r7
]= 6Uo
a
[2( a
r
)13−( a
r
)7] (10.10)
No ponto de equilıbrio tem-se F = 0:
∴ 2(
aro
)13−(
aro
)7= 0(
aro
)6= 1
2
ro = 21/6a = 21/6(3.5×10−10)m= 3.9×10−10m
(10.11)
Esta e a distancia media entre dois atomos de oxigenio na molecula de O2.Exemplo 6: Considere uma forca repulsiva do tipo:
F =Ax2 (10.12)
onde A > 0. O potencial e obtido usando a expressao
U(x)−U(xo) =−∫ x
xo
Fdx =−∫ x
xo
Ax2 =
Ax|xxo=
(1x− 1
xo
), (10.13)
isto e:

172 10 Equilıbrio e Estabilidade de um Sistema Fısico
U(x) =Ax. (10.14)
O grafico desta funcao esta representado na Fig. 10.6.
Fig. 10.6 Potencial U(x) = A/x vs. x.
Uma partıcula com energia total E vinda da esquerda atingira o ponto deaproximacao mınima xmin e depois reverte a direcao partindo para o infinito x→ ∞:
xmin =A
U(xmin), (10.15)
onde U(xmin) = E.
10.3 Princıpios variacionais
Os princıpios variacionais sao metodos alternativos para determinar o estado oua dinamica de um sistema fısico procurando o valor extremo de uma funcao (oufuncional) dos parametros relevantes do sistema.
Heron de Alexandria (c. 60 D.C.) foi dos primeiros pensadores a realcar que a leida reflexao θi = θr resulta do facto de a luz seguir o percurso mais curto entre doispontos extremos. Esta ideia foi generalizada por Pierre de Fermat 3 que formulou oPrincıpio da acao mınima: “os raios de luz percorrem o percurso mais curto entredois pontos”.
PRINCIPIO DE FERMAT: “os raios de luz propagam-se entre dois pontos nomenor tempo possıvel”.
Em termos formais, o percurso que um raio de luz faz ao propagar-se dum pontoA a um ponto B do espaco num meio de ındice de refraccao n, corresponde ao valormınimo do integral:
t =∫ B
A
nc
ds =∫ B
A
dsv, (10.16)
onde ds representa o deslocamento infinitesimal e v a velocidade do raio de luznesse meio.
Exemplos de algumas curvas que correspondem a tempos mınimos de percurso:
1. Linha recta: y = a1x;2. Parabola: y = a2x2;3. catenaria : y = 1
a coshax.
3 Pierre de Fermat (1601-1665) foi um matematico e cientista frances.

10.3 Princıpios variacionais 173
A catenaria 4 e a forma da curva que se obtem quando se suspende um cabo entredois postes sujeito a forca da gravidade. A equacao tem a forma:
y = 12a [exp(ax)+ exp(−ax)]
= 1a coshax
y(x = 0) = 1a .
(10.17)
Exemplo 7: Uma corrente uniforme encontra-se suspensa entre dois pontos A eB e esta em equilıbrio num plano vertical. Seja C o ponto mais baixo da catenaria,ou seja, o ponto onde a tangente e horizontal. Coloque-se a origem O do eixo Oxpor baixo de C, tal como mostra a Fig. 10.7.
Fig. 10.7 Catenaria.
Seja θ o angulo que a tangente em qualquer ponto da curva faz com Ox e−→T o
e−→T as tensoes em C e P, e seja CP = s. O comprimento CP da corrente esta em
equilıbrio sob a accao de tres forcas: T0, T e o peso ws = λ sg (λ e uma densidadelinear de massa) que actua no centro de gravidade G do arco CP:
T cosθ = ToT sinθ = ws
∴ dydx = tanθ = ws
To
(10.18)
O peso da corrente no ponto C pode ser encontrado por meio da energia potencialda corda de comprimento ds a altura y do ponto de referencia O (onde assumimosU(0) = 0):
dU = λdsyg. (10.19)
Obtemos logo a forca calculando a derivada em ordem a s:
Fx =−∂U∂x
=−λyg. (10.20)
Aqui substituımos ds = dx pois estamos a considerar a componente horizontal daforca. ds e o arco elementar que obedece a equaccao
ds2 = dx2 +dy2. (10.21)
Temos assim T0 = λy0g. Podemos agora escrever a equacao diferencial resul-tante:
4 A palavra catenaria deriva da palavra latina “catena”, que significa corrente. Esta curva tambemse chama de “alysoid”, “funicular”, ou “chainette”. O problema da determinacao da forma deuma correia pesada suspensa em dois pontos foi proposto por James Bernoulli. OS dois irmaosBernoulli, Huyghens e Leibniz, resolveram a questao, porem sem efectuarem uma analise defini-tiva, julga-se que na intencao de deixar alguns louros para outros.

174 10 Equilıbrio e Estabilidade de um Sistema Fısico(dsdy
)2≡ 1+
(dxdy
)2= 1+ y2
s2
∴ dy =± sds√s2+y2
0
∴ y+A =±√
s2 + y20
(10.22)
Repare que o sinal que aqui faz sentido e o sinal positivo, pois que quando x e saumentam, tambem y deve aumentar. Quando s = 0, temos y+A = y0. Portanto, seo eixo Ox for escolhido de modo que se localiza a distancia y0 do ponto mais baixoC da corrente, deve-se ter A = 0. Obtemos entao
y2 = s2 + y20. (10.23)
Substituindo o valor de y0 na Eq. 10.18-(a), obtemos
y0ds√s2 + y2
0
= dx, (10.24)
o que resulta em
y0 ln[s+√
s2 + y20] = x+B. (10.25)
Atendendo a que quando x= 0 quando s= 0, tem-se B= y0 lny0. Finalmente obtem-se √
s2 + y20 + s = y0ex/y0 . (10.26)
Teremos que incluir agora a solucao para a regiao negativa do eixo Ox:√s2 + y2
0− s = y0e−x/y0 . (10.27)
Somando as duas solucoes da Eq. 10.26 e Eq. 10.27, e usando a Eq. 10.23, obtem-se
y =y0
2
(e
xy0 + e
−xy0
)(10.28)
O eixo OX e Oy chamam-se, resp., a directrix e o eixo da catenaria, e o ponto Cchama-se vertex.
As Eqs. 10.23 revelam as tres importantesPROPRIEDADES DA CATENARIA:
1. A tensao horizontal em qualquer ponto da curva e constante e igual a T0 = λy0g;2. a tensao vertical em qualquer ponto P e igual a λdsg, onde s e o arco medido a
partir do ponto mais baixo da curva;3. a tensao resultante em qualquer ponto e igual a λdsyg, sendo y a ordenada medida
a partir da directrix.
Fig. 10.8 Catenaria, parabola e forma em catenaria do tabuleiro de uma ponte.

10.4 Potencia 175
Exemplo: Um cilindro tem raio r e altura h. Para um valor fixo do volume, quale o raio que devera ter o cilindro de modo a minimizar a sua superfıcie?
Temos V = πr2h=fixo. A superfıcie e dada por S = 2πr2 + 2πrh. Subsituindoh =V/πr2, obtemos
S = 2πr2 +2πrV
πr2 = 2πr2 +2Vr. (10.29)
Procuremos em seguida o valor da primeira e segunda derivada:
dSdr = 4πr− 2V
r2 = 0 ⇒ r3 = 2V4π
d2Sdr2 = 4π−2V d
dr (r−2) = 4π + 4V
r3 > 0.(10.30)
Verificamos assim que o valor rmin =( V
2π
)1/3= h
2 e o que minimiza a superfıcie deum cilindro, para um dado valor fixo do volumeV .
Recorda-se aqui que o valor maximo de uma funcao de uma variavel x e obtidoprocurando o valor xmin que corresponde a d f (x) = dx = 0, e verificando qued2 f (x)/dx2 > 0. Se d2 f (x)/dx2 < 0, entao o respectivo x e o valor que correspondeao maximo da funcao f (x) nesse ponto.
10.4 Potencia
A potencia P proporcionada por uma forca e a taxa temporal com que a forca efectuao trabalho. Quando uma forca externa aplicada a um objecto realiza a quantidade detrabalho ∆W no intervalo de tempo ∆ t, a potencia media P e dada por
P =∆W∆ t
. (10.31)
A potencia instantanea P e o valor limite da potencia media quando ∆ t→ 0:
P≡ lim∆ t→0
∆W∆ t
=dWdt
. (10.32)
As unidades sao [P] = J/s = Watts (W). 1 horse-power e igual a 745.7 W.Podemos expressar a potencia em funcao da velocidade da partıcula da seguinte
forma:dW = (
−→F ·d−→r )
P = dWdt = (
−→F · d−→r
dt ) = (−→F ·−→v ).
(10.33)
Note-se que o trabalho depende do referencial a que se refere e o mesmo se passacom a potencia.
Tendo a potencia, podemos obter a energia:

176 10 Equilıbrio e Estabilidade de um Sistema Fısico
E =∫ t2
t1 PdtE = Pt
(10.34)
A ultima expressao e valida quando P e constante.1 kW.h = 3.6×106 J.Combustıveis:
• 1 kilocaloria=4.187×103 J;
Exemplo 8: Um carro sobe com velocidade constante um plano inclinado cominclinacao θ = 10o. Os dados numericos sao: m = 1400 kg, v = 80 km/h e f = 700N. Calcule a forca necessaria para mover o carro com velocidade constante v e apotencia dispendida P. Admita que se exerce a forca de atrito resultante (sobre as 4rodas)
−→f .
Temos sucessivamente:
∑−→F = m−→a
∑Fx = maxF− f −mgsinθ = 0
F = 700+1400×9.80× sin10o
F = 3100N
(10.35)
A potencia eP = (
−→F ·−→v ) = 3100×22 = 6.8×104W (10.36)
ou seja 91 Hp (le-se “Horse Power”) (sendo 1 Hp= 746 W). Refira-se que 1 Hp =735.49875 W, 1 CV= 0.9863 Hp, sendo CV o “Cavalo-vapor”. Sao todas unidadesdiferentes de potencia.
Fig. 10.9 O carro sobe com velocidade constante um plano inclinado.
Exemplo 9: O movimento de qualquer corpo num meio fluido esta sempre sub-metido a uma forca resistiva. Infelizmente, so num numero de casos reduzidos sepode calcular teoricamente a forca resistiva, e usualmente quando os corpos temuma forma simples. Um caso notavel e a lei de Stokes para um corpo esferico. Namaioria dos casos tem que se recorrer a tecnicas experimentais a fim de determinar-se com exactidao a forca resistiva. E usual apresentar-se os resultados experimentaisda forca resistiva em termos de um coeficiente de atrito sem dimensao:
CD =D
12 ρV 2
A, (10.37)
onde D e a forca de atrito sobre o corpo, ρ e a densidade do fluido, V e a rapidezdo movimento relativo entre o fluido e o corpo, A e a area transversal do corpo. Apotencia dispendida contra a resistencia oferecida ao movimento pelo fluido e dadapor:

10.5 Formas de energia 177
P =12
ρV 3ACD. (10.38)
Para as viaturas CD ≈ 0.5 o que significa que a potencia necessaria para vencer aresistencia do ar quando a rapidez da viatura passa de 22.35 m/s para 31.29 m/saumenta de um factor 2.74. A situacao mais dramatica quando se considera os gastosenergeticos dos camioes, pois que estes oferecem uma area transversal mais signi-ficativa e na maior parte das vezes nao tem uma forma aerodinamica apropriada.
Exemplo 10: Uma roldana fixa, cuja massa pode ser desprezada, tem uma cordapesada de massa M que se encontra enlacada. No instante inicial um sujeito demassa m agarra-se a corda num ponto situado entre a roldana e o extremo inferiorda corda e comeca a trepar para se manter a uma altura constante. Qual a potencia Pdevera o sujeito dispender para assim se manter? Ao fim de quanto tempo o sujeitodeixara de conseguir manter-se nessa posicao, sabendo que ele consegue desen-volver a potencia muscular maxima Pmax?
Repare que, para o sujeito se manter a uma dada altura, ele devera exercer mus-cularmente uma forca igual e de sinal contrario a forca gravıtica, que o puxa parabaixo. Isto e, deve-se estabelecer o seguinte equilıbrio de forcas:
F = mgmg = Ma∴ a = m
M g(10.39)
Supondo que a velocidade inicial da corda e nula, vo = 0, entao a velocidade dacorda evolui com o tempo de acordo com a expressao
v =∫ t
0adt =
∫ t
0
mM
gdt =mM
gt (10.40)
donde se obtem a potencia
P =∫(−→F ·d−→v ) =
∫Fdv = mgv =
(mg)2
Mt (10.41)
Na realidade, uma pessoa consegue desenvolver por curtos intervalos de tempo umapotencia muscular Pmax = 200 W, o que da neste caso concreto t ∼ 1 ms. O que a Eq.mostra e que o sujeito conseguiria manter-se mais tempo suspenso se aumentasse amassa da corda!
10.5 Formas de energia
Ao investigar-se as mudancas que ocorrem com corpos livres em movimento depoisde terem interagido verifica-se que, independentemente do tipo de interaccao, cer-tas leis de conservacao sao observadas. Vimos que no movimento de um sistema(corpo, partıcula ideal,...) aberto na presenca de um campo externo uniforme, ha

178 10 Equilıbrio e Estabilidade de um Sistema Fısico
uma quantidade escalar E que se conserva, a energia mecanica total:
E = ∑i
12
miv2i +U. (10.42)
A energia compreende dois tipos essencialmente diferentes de componentes. A en-ergia cinetica e uma funcao quadratica da velocidade e a energia potencial U eindependente da velocidade.
Ja referimos que as leis de conservacao resultam de simetrias. Ao estudar-seo movimento dos corpos e realizando experiencias verificou-se que diferentes in-stantes temporais sao equivalentes no que se refere as propriedades fısicas dos cor-pos.
ISOTROPIA DO TEMPO: as propriedade fısicas dos diferentes momentos tempo-rais sa equivalentes.
O tempo nao e so apenas homogeneo como tambem e isotropo, isto e, as suas pro-priedades sao as mesmas em todas as direccoes. Substituindo−t por t na Eq. 10.42,assim como na equacao do movimento
d−→pdt
=− ∂U∂−→r
=−∇U, (10.43)
deixa estas duas equacoes inalteradas. Isto quer dizer que se um sistema e capaz deum determinado movimento, entao o movimento inverso tambem e possıvel; diz-seque
SEGUNDO AS LEIS DA MECANICA CLASSICA TODOS OS MOVIMENTOS SAOREVERSIVEIS.
A expressao quantitativa deste facto e a lei da conservacao da energia. O pro-gresso da ciencia tem confirmado que as leis de conservacao do momento (linear eangular) e da energia sao leis fundamentais da natureza. Todas as teorias fısicas quese conhecem descrevendo inumeraveis fenomenos podem ser obtidas a partir destasduas leis de conservacao.
Formas de energia:
• electrica• quımica• calor• nuclear
Unidades de energia usadas ao nıvel atomico e nuclear:
• 1 eV= electrao-volt• = 1.602×10−19 J.
Unidades de energia usados nas centrais de energia:
• 1 kW.h = 3.6×106 J.
Unidades de combustıvel:
• 1 kilocaloria= 4.187×103 J

10.5 Formas de energia 179
Relacao entre massa e energia no ambito da Relatividade de Einstein:Massa e equivalente a energia: E = mc2, onde c = 3× 108 m/s. Massa possui
energia e energia possui massa, mesmo no estado de repouso. Neste caso, e conve-niente escrever a equacao na forma Eo = moc2.
Exemplo 11: Um electrao e a sua anti-partıcula o positrao aniquilam-se mu-tuamente quando sao postas em contacto no estado de repouso, dando origem adois (ou mais fotoes). Qual e a energia maxima libertada? Exceptuando a suacarga, um positrao e em tudo semelhante ao electrao, sendo a massa de ambosiguais, me = me = 9.11×10−31 kg = 0.511 Mev/c2. Na Fig. 10.10 mostra-se uma“Penning-trap” destinado a acumular anti-materia e um possıvel motor desenhadopela NASA.
Fig. 10.10 “Penning-trap” e Possıvel motor a anti-materia desenhado pela NASA.
Temos2moc2 = 2Eγ = 2×0.511Mev (10.44)
Portanto liberta-se 1.022 MeV de energia. Toda a massa em repouso das duaspartıcula que sofreram aniquilacao de pares converteu-se em energia. E naturalque se procure utilizar este processo em propulsao de naves, como e o caso dasnaves “Enterprise” e “Voyager” da serie StarTrek. Esta ideia de usar motores deanti-materia e lavada a serio pela Marshall Space Flight Center, da NASA.
Enquanto que os processos quımicos podem produzir ate 107 J/kg, a fissao nu-clear 8×1013 J/kg, a fusao nuclear 3×1014 J/kg, a aniquilacao completa da materiacom anti-materia, como se pode verificar usando a relacao de Einstein, pode libertar9×1016 J/kg.
Porem existem limitacoes tecnologicas actuais: a anti-materia nao existe emquantidades significativas na natureza, tem que ser fabricada (como acontece eminstalacoes com potentes aceleradores de partıculas, no FermiLab, perto de Chicago,e no CERN, na Suıca. A quantidade de anti-protoes) produzida actualmente no Fer-milab e no CERN e de cerca de 1− 10 nanogramas. Outro problema ainda porresolver e como se armazena a anti-materia...na medida em que em contacto comas paredes do contentor se aniquilaria de imediato. Uma solucao provisoriamentesugerida consiste no uso de um dispositivo conhecido para aprisionar partıculas, o“Penning Trap”. Bastaria 71 mg de anti-materia para se libertar tanta energia quantoa que possuem os tanques de combustıvel do “Space Shuttle”...

180 10 Equilıbrio e Estabilidade de um Sistema Fısico
10.6 Momento linear de uma partıcula
As leis de Newton sao formuladas com maior rigor quando expressas em termos dequantidade de movimento 5, −→p .
A quantidade de movimento linear de uma partıcula de massa m movendo-secom velocidade −→v e definida pela expressao:
−→p = m−→v (10.45)
E um vector que tem a mesma direcao e sentido que o vector velocidade e tem asunidades fısicas no SI em kg.m/s.
A Primeira Lei de Newton, recordamos, afirma que na ausencia de forcas a quan-tidade de movimento de uma partıcula e constante.
F = 0⇒V = constantep = constante (10.46)
Na ausencia de forcas p e uma quantidade que se conserva. Como ja referimos, asquantidade que se conservam em Fısica sao:
• quantidade de movimento linear, −→p .• energia, E;• momento angular,
−→L ;
• carga electrica, q.
Quando temos um sistema de partıcula (por ex., uma garrafa de gas), interna-mente ocorrem permanentemente colisoes e interacoes de grande complexidade. Naausencia de forcas externas aplicadas a quantidade de movimento linear total dosistema e conservada.
SEGUNDA LEI DE NEWTON: a taxa de variacao do momento linear iguala a forcaaplicada:
−→F = d−→p
dt = ddt (m−→v )
=( dm
dt
)−→v +m(
d−→vdt
) (10.47)
Concluımos da equacao anterior que so se verifica a equacao
−→F = m−→a (10.48)
quando dm/dt = 0, isto e, a massa do sistema permanece constante. Daqui vemostambem que a forma mais geral da equacao fundamental da dinamica escreve-se
−→F =
d−→pdt
. (10.49)
podendo-se assim estudar sistemas de massa variavel, como e o caso do foguetao.
5 Em ingles diz-se “momentum”.

10.6 Momento linear de uma partıcula 181
TERCEIRA LEI DE NEWTON: A accao iguala a reaccao.Quando dois corpos interagem a variacao do momento linear resultante e igual
e oposta; esta e uma forma da Lei da conservacao da quantidade de movimentolinear.
Exemplo 12: Colisao elastica: uma bola de mB = 100 g colide contra uma paredecom a rapidez de 50 m/s, ressaltando com a mesma rapidez. Qual e a variacao daquantidade de movimento da bola?
No inıcio, antes da colisao, a bola tem a quantidade de movimento−→p i = mBvo−→i
e no estado final, apos a colisao com a parede tem a quantidade de movimento−→p f =−mBvo
−→i . Logo a variacao da quantidade de movimento linear e
∆−→p =−→p f −−→p i
=−2mBvo−→i
=−2×0.1×50−→i =−10kg.m/s.
(10.50)
Se considerarmos agora a variacao de momento linear total (incluindo portanto aparede) deverıamos obter ∆
−→p total = ∆−→p bola + ∆
−→p parede = 0. Portanto a parededevera ter absorvido a diferenca, isto e, 2mBvo
−→i .
Fig. 10.11 Bola de massa mB colide elasticamente contra uma parede.
Em seguida iremos estudar o movimento de um sistema de partıculas. Se osistema for composto por N partıculas de momento linear, ou apenas momento−→p 1 = m1
−→v 1, −→p 2 = m2−→v 2,...−→p n = mn
−→v n, entao o momento total do sistema departıculas e dado pela soma dos momentos individuais:
−→p =−→p 1 +−→p 2 + ...+−→p n =
N
∑i
−→p i. (10.51)


Chapter 11Sistema de 2 partıculas. Centro de Massa
“O binomio de Newton e tao belo como a Venus de Milo.O que ha e pouca gente para dar por isso. oooo—oooooo ooo— ooooooo oooooooo (Ovento la fora.)
- Fernando Pessoa, Poesias de Alvaro de Campos
11.1 Sistema de duas partıculas
O sistema de 2 partıculas e o mais simples mas apresenta aspectos muito inter-essantes. Considere duas partıculas sujeitas a uma interacao do tipo atractivo e deforca central (dirigida ao longo da linha que une as duas partıculas). Tal como ilustraa Fig. 11.1 pela Terceria Lei de Newton (ou lei da accao-reaccao) deve-se ter:
−→F 1 =−
−→F 2 (11.1)
Fig. 11.1 Sistema de 2 partıculas em interacao do tipo atractiva.
As equacoes do movimento sao:
d−→p 1dt =
−→F 1
d−→p 2dt =
−→F 2
d−→p 1dt + d−→p 2
dt =−→F 1 +
−→F 2 = 0
∴ ddt (−→p 1 +
−→p 2) = 0.
(11.2)
Logo−→p =−→p 1 +
−→p 2 =Const. (11.3)
183

184 11 Sistema de 2 partıculas. Centro de Massa
Podemos concluir que as partıculas trocam momento enquanto interagem. em par-ticular, se houver unicamente forcas internas (do tipo forca central) agindo sobre aspartıculas, o momento total conserva-se.
Uma forca central depende so da distancia r entre a fonte do campo e a partıcula-teste e e dirigida radialmente. O campo criado por este tipo de forca tem simetriaesferica.
Uma forca central pode sempre ser expressa como o negativo de um gradiente depotencial: −→
F =−∇U(r) (11.4)
e o rotacional rot da forca e zero:
rot−→F = 0. (11.5)
A forca gravitacional e a forca de Coulomb sao ambas forcas centrais onde F(r)varia como 1/r2.
Exemplo 13: Forcas que violam a lei da accao-reaccao. Forcas do tipo giroscopico,isto e, na forma
−→F = q[−→v ×−→B ], ou
−→F = 2m[ωωω×−→v ], nao satisfazem a lei da acao-
reacao.
QuadroNegro 1 -

11.1 Sistema de duas partıculas 185
Exemplo 14: Colisao inelastica.Dois vagoes de massa m1 = m2 = 104 kg encontram-se sobre um trilho metalico
horizontal de atrito desprezavel. O primeiro desloca-se com velocidade v1 = 24 m/sna direccao do outro que se encontre parado (Vd. Fig. 11.2). Os vagoes colidem eficam acoplados. Qual e a velocidade comum final v′?
Fig. 11.2 Colisao inelastica de dois vagoes.
O momento inicial e: m1v1−→i .
O momento final e: (m1 +m2)v′−→i .
Repare que as forcas verticais anulam-se reciprocamente,−→N = m−→g . Supoe-se
que nao existem forcas exercidas horizontalmente: a conservacao do momento da-nos a seguinte expressao:
m1v1 = (m1 +m2)v, (11.6)
donde obtemos sucessivamente
v = m1m1+m2
v1
= 104
2×104 ×24 = 12m/s.(11.7)
Porem a energia nao e conservada como se pode rapidamente confirmar (e porque acolisao e totalmente inelastica): no inıcio tem-se
Ki =12
m1v21 (11.8)
e no final, apos a colisao, tem-se
K f =12(m1 +m2)v2 =
m1v21
4 Ki (11.9)
Exemplo 15: Duas partıculas com massa m1 = 2.0 kg e m2 = 5.0 kg podemdeslizar com atrito desprezavel numa haste (Fig. 11.3-(a)). Uma mola com con-stante elastica k = 103 N/m encontra-se ligada a massa m2. Suponha que num dadoinstante tem-se v1 = 14 m/s e v2 = 0.
a) Qual e a compressao maxima da mola quando as partıculas colidem?b) Quais sao as velocidade finais das partıculas?Quando a mola esta com a maxima compressao, a velocidade relativa das duas
massas e zero. O sistema tem porem a velocidade de conjunto vo:
Fig. 11.3 Colisao entre duas massas m1 e m2 tendo no meio uma mola.

186 11 Sistema de 2 partıculas. Centro de Massa
m1v1 +m2×0 = (m1 +m2)vo∴ vo =
m1m1+m2
v1 =2×142+5 = 4m/s. (11.10)
Ja por sua vez a energia inicial e:
Ko =12
m1v21 +
12
m2×0 =12×2.0(14)2 = 196J. (11.11)
Por sua vez, quando a compressao da mola e maxima, a energia cinetica do sistema(massas + mola) e:
K f =12(m1 +m2)v2
o =12(2+5)42 = 56J. (11.12)
O teorema trabalho-energia estabelece que
Wd = ∆(K +U) = 0 (11.13)
pois que nao ha trabalho efectuado pelas forcas dissipativas (como as de fricao),donde concluımos que
Ki +0 = K f +U fU f = Ki−K f
12 kx2 = 1
2 k(l− lo)2 = Ki−K f
∴ x =√
2(Ko−K)k =
√2×(196−56)
1000 = 0.53m.
(11.14)
b) Apos a colisao elastica com a mola, as duas massas separam-se uma da outracom uma dada velocidade que importa agora calcular. Quando as partıcula se sepa-ram, a energia armazenada na mola e convertida em energia cinetica das partıculase a energia total e o momento sao necessariamente conservados:
m1v′1 +m2v′2 = m1v1 +m2×012 m1v′21 + 1
2 m2v′22 = 12 m1v2
1 +12 m2×02.
(11.15)
2v′1 +5v′2 = 28kg.m/s2v′21 +5v′22 = 392J2.
(11.16)
Substituindo a Eq. 17.181-(a) na Eq. 17.181-(b), obtem-se:
v′2 =28−2v′1
5
2v′21 +5[ 28−2v′15 ]2 = 392
(11.17)
Esta ultima equacao tem duas solucoes: v′1 = 14 e v′1 =−6. A primeira da-nos v′2 = 0(que nao e fisicamente correcta, porque significaria que so m1 seria propelida e m2ficaria em repouso), e a segunda solucao, que essa sim, faz sentido, ficando entao,v′2 = 8 m/s.
Exemplo 16: Uma bola animada com velocidade −→v e energia cinetica K colidecom um conjunto de duas bolas ligadas por uma mola que se encontram em repouso

11.2 Centro de massa 187
sobre uma superfıcie lisa, sem atrito, como mostra a Fig. 11.3-(b). Na sequenciada colisao (elastica) a bola reparte em movimento no sentido contrario com energiacinetica K′. Assume-se que as tres bolas tem igual massa m. Calcule a energia dasoscilacoes do conjunto das duas massas acopladas depois da colisao.
Designe por p e p′ os momentos lineares da bola que vai ao encontro das outrasduas, resp., antes e depois da colisao. E sejam pc, K′c e Er o momento linear, aenergia cinetica e a energia devido ao movimento relativo do conjunto das duasbolas acopladas, depois da colisao.
As leis da conservacao do momento linear e da energia cinetica (trata-se de umacolisao elastica) dao-nos as seguintes relacoes:
px =−p′x + p′cK = K′+K′c +Er
(11.18)
Atendendo a que K = p2/2m, obtemos de imediato:
Er =12(K−3K′−2
√KK′). (11.19)
11.2 Centro de massa
Ate agora temos considerado partıcula pontuais, mas veremos em seguida que paraobjectos de dimensao finita, o centro de massa representa perfeitamente o movi-mento do sistema de partıculas.
DEFINICAO DE CENTRO DE MASSA: o vector posicao do centro de massa (CM)representa a posicao media da massa do sistema e define-se por meio do vector:
−→r cm =m1−→r 1 +m2
−→r 2 + ...mn−→r n
m1 +m2 + ...mn(11.20)
ou ainda−→r cm =
m1−→r 1 +m2
−→r 2 + ...mn−→r n
M=
∑Ni=1 mi
−→r i
M. (11.21)
M = ∑Mi=1 mi representa a massa total do sistema.
Em termos da suas componentes, temos
xcm = 1M [m1x1 +m2x2 + ...mnxn] =
1M ∑mixi
ycm = 1M [m1y1 +m2y2 + ...mnyn] =
1M ∑miyi
zcm = 1M [m1z1 +m2z2 + ...mnzn] =
1M ∑mizi
(11.22)
Finalmente, tambem podemos escrever:
−→r cm = xcm−→i + ycm
−→j + zcm
−→k . (11.23)

188 11 Sistema de 2 partıculas. Centro de Massa
Fig. 11.4 Centro de massa de um sistema de partıculas.
Exemplo 17: CM de duas partıculas (KBr, ou brometo de potassio, Vd. Fig. 11.5.
ycm = 0xcm = m1x1+m2x2
m1+m2
(11.24)
Sabe-se que x1 = 0 e x2 = 2.82 A, e as massas tem os seguintes valores (como sepode ler na Tabela Perodica) m1 = 79.9 u, m2 = 39.1 u (onde u e a unidade de massaatomica).
xcm =79.9×0+39.1×2.82
79.9+39.1= 0.93A. (11.25)
Fig. 11.5 CM da molecula diatomica de brometo de potassio.
Exemplo 18: CM de 3 partıculas. As posicoes sao: (x1 = d,y1 = 0) para m1 = 2m,(x2 = d +b,y2 = 0) para m2 = m e (x3 = d +b,y3 = h) para m3 = 4m.
QuadroNegro 2 -
O vector posicao do CM e dado pelo vector:
−→r cm = xcm−→i + ycm
−→j
−→r cm = (d + 57 b)−→i + 4
7−→j .
(11.26)

11.2 Centro de massa 189
11.2.1 CM de um grupo de partıculas; procedimento geral
Se tivermos um grupo de partıculas podemos dividi-lo em dois sub-grupos, por ex-emplo (ou mais). Em seguida, determina-se o CM de cada grupo tratando-se cadagrupo como uma partıcula unica situado no seu CM e depois calcula-se o CM dogrupo combinado (total):
M−→R =
l
∑i=1
mi−→r i +
n
∑j=l+1
m j−→r j. (11.27)
Se designarmos os vectores posicao do CM de ambos os grupos aqui chamados B eG: −→
R B = 1MB
∑li=1 mi
−→r i−→R G = 1
MG∑
nj=l+1 m j
−→r j(11.28)
onde MB = ∑li=1 mi e MG = ∑
nj=l+1 m j, podemos escrever
M−→R = MB
−→R B +MG
−→R G, (11.29)
onde M = MB +MG, ou ainda
−→R =
1M[MB−→R B +MG
−→R G]. (11.30)
11.2.2 CM de corpos solidos
Considere um objecto com uma distribuicao contınua de massa. Vamos dividir empensamento este objecto em elementos de massa muito pequenos ∆mi com coorde-nadas xi,yi,zi, tal como se ilustra na Fig. 11.6.
A coordenada no eixo Ox do CM devera ser dado pela expressao:
xc =∑xi∆mi
M. (11.31)
Facamos tender para zero a massa destes pequenos elementos de massa:
xc = lim∆mi→0
∑xi∆mi
M=
1M
∫xdm. (11.32)
O mesmo tipo de raciocınio conduz-nos igualmente a
yc =1M∫
ydmzc =
1M∫
zdm(11.33)
Deste modo vemos que o vector posicao do CM e dado por

190 11 Sistema de 2 partıculas. Centro de Massa
−→r cm =1M
∫−→r dm. (11.34)
A Eq. 17.190 revela-nos que o CM de um objecto rıgido, homogeneo e simetrico
Fig. 11.6 Um corpo rıgido pode ser considerado uma distribuicao de pequenos elementos de massa∆mi.
deve situar-se num eixo de simetria. Por exemplo, se um objecto possui um ponto,linha ou plano de simetria, entao o CM deve ficar sobre esse ponto, linha ou planode simetria. Alem disso, repare que nao e necessario que haja partıculas sobre o CMde um dado objecto, como e o caso do CM de um “donut”.
A maior parte das vezes e conveniente exprimir a distribuicao das massas emtermos da densidade local de massa e de um elemento de volume:
dm = ρdV (11.35)
onde ρ = ρ(x,y,z) denota a densidade local de massa (ou densidade volumica demassa).
Assim, devemos ter−→r cm =
1M
∫−→r ρdV (11.36)
Projectando nos eixos cartesianos temos:
xc =1M∫
xρdVyc =
1M∫
yρdVzc =
1M∫
zρdV(11.37)
Exemplo 19: Calcule as coordenadas do CM da placa homogenea indicada naFig. 11.7, um cırculo de 1.0 m de raio do qual foi removido um cırculo de 0.5 m deraio, com uma separacao de 0.25 m entre os centros O e O′ dos dois cırculos.
QuadroNegro 3 -

11.2 Centro de massa 191
Fig. 11.7 (a) - CM de dois cırculos descritos no Exemplo 19; (b) - CM da lamina parabolica.
Exemplo 20: Determine o CM da lamina parabolica limitada pelas curvas y2 =2px e x = a, tal como mostra a Fig. 11.7-(b).
Por razoes de simetria vemos que o CM devera ficar sobre o eixo Ox. Logo,ycm = zcm = 0. Denotando a densidade superficial de massa por σ e considerandoos dois a regiao acima e abaixo do eixo Ox, temos
dm = 2σydx= 2σ
√2pxdx. (11.38)
Podemos usar a expressao
xcm =
∫ m0 xdm∫ m0 dm
(11.39)
onde m e a massa do corpo (neste caso a lamina). Temos
xcm =2σ∫ a
0 x√
2pxdx2σ∫ a
0√
2pxdx=
∫ a0 x3/2dx∫ a0 x1/2dx
=3a5. (11.40)
11.2.3 CM de areas
Quando os objectos tem a forma de um folha plana de espessura constante t:
∆mi = σ∆ai (11.41)
onde σ e a densidade massica superficial (em unidade kg/m2), entao temos
xcm = 1M∫
σxdaycm = 1
M∫
σyda(11.42)
onde da = dxdy. Se σ(x,y) = σo for constante, a posicao do CM e dada por
xcm = 1A∫
xdaycm = 1
A∫
yda(11.43)
Exemplo 1: CM de um cone circular direito.Por razoes de simetria o CM deve situar-se sobre o eixo do cone:
xcm = 0ycm = 0 (11.44)
enquanto que
zcm =1M
∫zdm =
1M
∫ h
0ρzπr2dz. (11.45)

192 11 Sistema de 2 partıculas. Centro de Massa
O cone e dividido num grande numero de pequenos cilindros infinitesimais de raior e espessura dz. Assume-se ρ = constante.
A massa de cada cilindro de espessura infinitesimal e:
dm = ρdV = ρπr2dz. (11.46)
O raio de cada cilindro esta relacionado com a sua altura z por meio da relacao:
rz =
Rh
⇒ r = Rzh
(11.47)
Fig. 11.8 Cone circular direito.
QuadroNegro 1 -
11.2.4 Movimento do centro de massa
Em mecanica nao-relativista a massa e independente da velocidade. Chamamos cen-tro de massa ou centro de inercia de um sistema um ponto imaginario cujo vectorposicao
−→R se exprime em funcao dos vectores posicoes −→r 1, −→r 2,...dos diversos

11.2 Centro de massa 193
pontos materiais na seguinte forma:
−→R =
m1−→r 1 +m2
−→r 2 + ...
M, (11.48)
onde M = m1 +m2 + ... e a massa total do sistema. Este ponto normalmente e deno-tado por CM.
Calculemos a derivada temporal do vector posicao do CM. Obtem-se facilmente:
−→v cm =d−→r cm
dt=
1M[m1
d−→r 1
dt+m2
d−→r 2
dt+ ...mn
d−→r n
dt]. (11.49)
Pode-se ainda escrever
−→v cm = 1M (m1
−→v 1 +m2−→v 2 + ...mn
−→v n)−→v cm =
−→PM .
(11.50)
Ou seja, concluımos que: −→P = M−→v cm. (11.51)
O MOMENTO TOTAL DE UM SISTEMA DE PARTICULAS e o produto da sua massatotal pela velocidade do CM. Isto e, tudo se passa como se
−→P fosse o momento total
de uma partıcula unica de massa M movendo-se com a velocidade −→v cm.Diferenciando de novo a Eq. 11.50 em ordem ao tempo obtemos a aceleracao do
CM:−→a cm = d−→v cm
dt = 1M ∑mi
d−→v idt = 1
M ∑mi−→a i
M−→a cm = ∑i(−→F ext
i +−→F int
i )(11.52)
onde−→F ext
i denota a forca externa exercida sobre a partıcula i, enquanto−→F int
i denotaa forca interna exercida sobre a partıcula i.
Esta proposicao chama-seTEOREMA DO MOVIMENTO DO CENTRO DE MASSA: o centro de massa de um
sistema desloca-se como um ponto material cuja massa e igual a massa total dosistema e ao qual estao aplicados todas as forcas externas e internas que actuamsobre esse sistema.
Estas equacoes chamam-se equaccoes diferenciais vectoriais do movimentodo sistema e permitem-nos definir a lei do movimento do sistema. Como se com-preende, o teorema do movimento do CM traz enormes vantagens porque nao enecessario resolver cada uma das equacoes de cada um dos pontos do sistema,com as dificuldades matematicas inerentes. Basta-nos determinar as caracterısticasdo movimento do sistema considerado como um todo. Em particular, se um corpoefectua um movimento de translacao, o seu movimento fica completamente definidopelo do seu centro de massa.
As forcas exercidas sobre qualquer partıcula podem ser consideradas de origem:
• externa: provenientes do exterior do sistema;• interna: com origem no interior do sistema.

194 11 Sistema de 2 partıculas. Centro de Massa
Decorre da Segunda Lei de Newton que as forcas internas cancelam-se par a par,de modo que a ∑i
−→F int
i = 0. Ora este resultado e rigorosamente verdadeiro se setratarem de forcas centrais, como e o caso da forca gravıtica 1.
Do teorema do movimento do CM podemos tirar varias conclusoes de grandeimportancia:
1) Vamos admitir que a soma das forcas exteriores que actuam sobre o sistema eigual a zero:
∑−→F ext
i = 0. (11.53)
Da Eq. 17.182 concluımos que
d−→P
dt= M−→a c = 0 (11.54)
ou seja −→P = M−→v c = constante (11.55)
Se a soma das forcas exteriores que actuam sobre um sistema e igual a zero, oCM do sistema desloca-se com uma velocidade constante em modulo e direccao. Omovimento e rectilıneo e uniforme e o momento total do sistema conserva-se.
Vejamos alguns exemplos ilustrativos das aplicacoes desta lei:Exemplo 2: Movimento do CM do sistema solar: A atraccao das estrelas sobre
o sistema solar e praticamente desprezavel, isto e, nao existem praticamente forcasagindo sobre o CM do sistema solar, donde podemos concluir que o seu movimentoe rectilıneo e uniforme, em primeira aproximacao.
Exemplo 3: Accao de um binario sobre um corpo: Se aplicarmos um binario(−→F ,−→F ′) sobre um solido livre este entrara certamente em rotacao. Porem, como−→
F +−→F ′ = 0, o seu CM permanecera em repouso (ou em movimento uniforme, se
ja estivesse com esse movimento).Exemplo 4: Explosao de um projectil: Um “rocket” e disparado para o ar, tal
como se encontra ilustrado na Fig. 11.9. No seu ponto de altura maxima distantehorizontalmente de D da origem, o rocket separa-se em duas partes de igual massa.A parte I cai verticalmente para a Terra. Onde caira a parte II? Assuma g constante.
Fig. 11.9 Um “rocket” e disparado para o ar fragmentando-se em duas partes iguais.
Tem-se mI = mII . O CM descreve uma trajectoria balıstica como se se tratassede uma partıcula de massa total M = mI +mII , atingindo o solo a uma distancia(alcance) 2D da origem. como as massas mI e mII sao iguais, a parte II colide como solo a distancia D para la do ponto onde “cai” o CM, isto e, a uma distancia3D da origem. Recordamos que as forcas externas sao nulas para a componente
1 No caso de forcas giroscopicas esta consideracao requer cuidado.

11.2 Centro de massa 195
horizontal do movimento. Desprezando forcas de atrito, a unica forca externa actuano movimento vertical.
Exemplo 5: Movimento num plano horizontal: O atrito permite o nosso movi-mento no solo. Se estivessemos sobre um piso escorregadio, se avancassemos umaperna para a frente a outra seria forcada a deslocar-se para tras de modo a que oCM permanecesse no mesmo sıtio. Os nossos esforcos musculares (forcas internas)seriam inuteis e sendo as projecoes de todas as forcas externas no plano horizon-tal nulas, terıamos sempre xc constante. Pelo contrario, havendo atrito, suponhamosque avancamos com a perna direita e deixamos a perna esquerda para tras. O atritosobre a perna esquerda tera o sentido oposto e e esta forca externa que permite onosso movimento para a frente, na direcao da accao que exerce para a frente.
O deslocamento duma locomotiva ou de um automovel processa-se da mesmamaneira. O que ocorre internamente no motor de combustao e incapaz por si so, defazer mover o aparelho. O deslocamento ocorre porque o motor transmite para asrodas motoras um movimento de rotacao.
Como se mostra na Fig. 11.10, o ponto de contacto A move-se para a esquerdamas sobre a roda actua uma forca de atrito dirigida para a direita. Se esta forcanao existe ou e insuficiente para vencer a resistencia exercida pelas rodas livres(isto e, que nao estao sujeitas a um momento de rotacao
−→M rot mas estao submetidas
unicamente a uma forca−→Q actuante sobre o seu eixo), entao nao ocorre nenhum
movimento para a direita, comecando as rodas motoras a patinar.
Fig. 11.10 Forcas externas sobre as rodas de um automovel ou locomotiva.
Exemplo 6: Considere uma massa pontual, m, com velocidade v0 = v0ex e quechoca com um halter parado formado pelas massas 2m e m ligadas rigidamente auma distancia 2l por uma barra de massa desprezavel (ver Fig. 11.11). Depois dochoque as duas massas m ficam coladas. Aplicacao numerica: v0 = 5 m/s, l = 0.5m, m = 1 kg.
Fig. 11.11 Partıcula colide com halter.
a) Descreva o momento do centro de massa determinando RCM e VCM antes e depoisdo choque.
b) Descreva o movimento do halter depois do choque calculando o modulo de ve-locidade angular da rotacao em torno do centro de massa.
c) Calcule a energia cinetica dissipada no choque.

196 11 Sistema de 2 partıculas. Centro de Massa
QuadroNegro 2 -
Exemplo 7: Canhao sobre a via ferrea: Um canhao e instalado sobre um vagaoque se pode mover com atrito desprezavel sobre uma via ferrea rectilınea horizontal.
10) (Canhao sobre a via ferrea; quantidade de movimento) Um canhao encontra-seinstalado sobre um vagao que pode se mover sem atrito sobre uma via rectilıneahorizontal. O canhao e o vagao de massa total M, estao em movimento a velocidadeu quando um obus de massa m (nao incluıdo em M) e disparado pelo canhao com avelocidade v em relacao ao vagao. O tubo do canhao e o eixo da via encontram-seno mesmo plano vertical e o cano faz um angulo α com o plano horizontal, fazendoα um angulo agudo relativamente a direccao de deslocamento do vagao.

11.2 Centro de massa 197
Determine o alcance do obus e mostre que a distancia entre este e o vagao quandoo primeiro atinge o solo e independente de M e m.
QuadroNegro 3 -
11.2.5 Energia de um sistema de partıculas
A energia cinetica de um sistema de n partıculas em movimento com velocidade−→v num dado referencial de inercia e dada pelo somatorio da energia de cada umadelas:

198 11 Sistema de 2 partıculas. Centro de Massa
K =12
m1v21 +
12
m2v22 + ...
12
mnv2n. (11.56)
Pode-se condensar esta expressao na forma:
K = ∑i
12
miv2i . (11.57)
Seria interessante escrever esta expressao em termos da velocidade do CM, −→v cm.Para este efeito e conveniente colocarmo-nos num referencial de inercia que se movacom o CM, o “referencial CM”.
As partıculas neste referencial (do CM) tem a velocidade −→u que se encontrarelacionada com as outras por meio da transformacao de Galileu:
−→u 1 =−→v 1−−→v cm...
−→u n =−→v n−−→v cm
(11.58)
ou seja, em termos da velocidade no referencial de inercia inicial:
−→v 1 =−→u 1 +
−→v cm...
−→v n =−→u n +
−→v cm
(11.59)
A insercao das Eqs. 11.59 na Eq. 11.56 conduz-nos a seguinte sucessao de calculos:
K = 12 (−→u i +
−→v cm)2 + ... 1
2 mn(−→u n +
−→v cm)2
= 12 m1(
−→u 21 +2−→u 1 ·−→v cm + v2
cm)+ ...= [ 1
2 m1u21 +
12 m2u2
2 + ...]+ [m1−→u 1 +m2
−→u 2 + ...] ·−→v cm + 12 [m1 +m2 + ...]v2
cm(11.60)
Obtemos apos um calculo simples
K = ∑i
12
miu2i +[∑
imi−→v i−∑
imi−→v cm] ·−→v cm +
12
Mv2cm. (11.61)
O segundo termo e nulo pela propria definicao da velocidade do CM. Finalmenteobtemos:
K = Kint +12
Mv2cm. (11.62)
A Eq. 11.62 mostra que a energia cinetica total no referencial de inercia ini-cial contem a energia interna do sistema (no CM, por ex., devido a rotacoes eagitacao termica) e a energia de translacao do CM. Ao fim e ao cabo, obtivemosa decomposicao da energia nas suas varias parcelas.
Podemos assim enunciar o Teorema de Konig que estabelece uma relacao entreas energias cineticas nos diferentes referenciais.
TEOREMA DE KONIG: A energia cinetica de um sistema de pontos materiais eigual a soma da energia cinetica da massa do sistema inteiro que se imagina concen-

11.3 Sistemas de massa variavel. Equacao do foguetao 199
trada no seu CM deslocando-se com ele, e a energia cinetica desse mesmo sistemaem movimento relativo ao seu CM.
Se forcas conservativas internas e externas actuam sobre o corpo, o sistematambem tera energia potencial, U , que sera funcao da posicao de todas as partıculase que devera ser adicionada a energia cinetica de modo a obtermos a energia totaldo sistema de n partıculas:
Etot = Ktot +Utot . (11.63)
Considerando em particular um corpo extenso composto de n partıcula sob aaccao do campo gravıtico, a sua energia gravitacional sera dada pelo somatorio:
U = (m1z1 +m2z2 + ....mnzn)g = Mzcmg. (11.64)
O corpo extenso comporta-se como se todo a massa estivesse localizada no CM.
11.3 Sistemas de massa variavel. Equacao do foguetao
Temos estudado ata aqui sistemas em que a massa e constante. A equacao funda-mental da dinamica e
−→F ext = d−→p /dt. O que acontece quando a massa do sistema
varia? Podemos definir uma fronteira do sistema de tal forma que haja massa a en-trar ou sair. O foguetao e o exemplo mais evidente. Os sistemas de massa variavelincluem-se entre uma classe importante e fundamental de problemas fısicos.
Comecaremos entao por tratar o problema do foguetao. O argumento foi dadopor Ivan Vsevolodovich Meshchersky em 1897. Considere um foguetao com massam(t) e velocidade−→v relativa a um dado referencial de inercia num instante t. A Terrae usada como referencial de inercia por uma questao de conveniencia. Num instanteposterior t+∆ t e ejectada a quantidade de materia de massa δ µ (combustıvel e com-burente queimados) com a velocidade −−→v e relativa ao foguetao (a velocidade docombustıvel ejectado e normalmente considerada constante), enquanto que a massarestante do foguetao (m−δ µ) adquire a velocidade−→v +∆
−→v . Mas agora repare quea massa δ µ tem a velocidade −→v +∆
−→v −−→v e relativamente ao solo.
Fig. 11.12 Problema do foguetao.
Isto e, o momento antes e depois da ejecao da massa e:
−→p (t) = m−→v−→p (t +∆ t) = (m−δ µ)(−→v +∆
−→v )+δ µ(−→v +∆−→v −−→v e)
(11.65)
A variacao do momentum linear num intervalo de tempo ∆ t resulta necessariamentede uma forca externa
−→F ext (no vacuo seria a forca gravıtica).

200 11 Sistema de 2 partıculas. Centro de Massa
QuadroNegro 4 - Equacao do foguetao.
Obtem-se entao a velocidade do foguetao num instante t:
v(t) =−ve lnm0−Rt
m0−gt, (11.66)
sendo ve a velocidade de ejeccao dos gases pelo exaustor (em m/s), R = −dm/dta taxa de combustao, m0 e a massa total inicial incluindo o propelente (em kg).
O empuxo do foguetao (isto e, a forca que age sobre o foguetao), no SI exprime-se em kg.m./s ou N:
Fem = Rve =|dmdt| ve. (11.67)

11.3 Sistemas de massa variavel. Equacao do foguetao 201
O empuxo e proporcional a quantidade de gases expelidos por unidade de tempo.O impulso da forca com que o foguetao age sobre a massa de gas ejectada e dado
pord p = Femdt = dmve. (11.68)
A quantidade
I =d pdm
= ve (11.69)
representa o impulso por unidade de massa e e igual a velocidade de ejeccao (ouexaustao) dos gases de um foguetao em repouso. A ordem de grandeza de ve e de 2km/s para os gases resultantes da combustao de combustıvel solido e 3 km/s paracombustıvel lıquido. Porem, e mais frequente medir o desempenho (performance)do motor de um fogutao ou motor a jacto (tipo turbofan ou outro) por meio daquantidade chamada impulso especıfico:
Iesp ≡ve
g0, (11.70)
cuja unidade fısica e o s e onde g0 = 9.81 m/s2.Um foguetao e constituıdo basicamente por:
• carga util (tripulacao, satelite artificial, explosivos,...);• reservatorio de propelente;• camara de combustao (o propelente, solido ou lıquido, por reaccao de combustao
converte-se em gas a alta pressao, alta temperatura e baixa velocidade. Por ex-emplo, numa mistura de hidrogenio e oxigenio lıquidos, a pressa)o e da ordemdas 200 atm e a temperature de 3500 C);
• tubeira, ou bucal de Laval 2, (A funcao do bucal de Laval e converter e dire-cionar o fluxo de gas ejectado da camara de combustao onde esta a alta pressao,alta temperatura e baixa velocidade para o exterior, num processo designado porisentropico, a pressao e temperatura mais baixas e alta velocidade).
Na ausencia de gravidade g = 0 e assumindo v(t = 0) = v0 = 0, obtem-se
vve
= lnm0
m(11.71)
ou m0
m= ev/ve . (11.72)
Esta e a celebre formula de Tsiokolvsky 3. Pode-se ainda exprimir a Eq. 11.66 naforma:2 (Karl) Gustaf (Patrick) de Laval (9 de Maio de 1845-2 de Fevereiro de 1913) foi um engenheiroSueco e inventor que deu importante contribuicoes para a concepcao de turbinas a gas. Em 1890Laval desenvolveu uma tubeira capaz de aumentar a velocidade de ejeccao do vapor a valoressupersonicos.3 Konstantin Eduardovich Tsiolkovsky (1857-1935) foi um cientista sovietico, pioneiro da as-tronautica. O seu trabalho inspirou os engenheiros sovieticos leaderes do bem sucedido programasovietico, Sergey Korolyov e Valentin Glushko.

202 11 Sistema de 2 partıculas. Centro de Massa
∆v = ve lnm0
m1(11.73)
onde m1 e a massa total final (em kg). ∆v le-se delta-v.Da Eq. 11.66 pode-se obter a fraccao massica que resta quando ocorre uma
variacao da velocidade ∆v:
m0−m1
m0= 1− e−∆v/ve (11.74)
Por exemplo, podemos assumir que a velocidade de exaustao e ve = 4.5 km/s e∆v = 9.7 km/s (esta e o incremento de velocidade a imprimir ao foguetao para otransportar ate uma orbita terrestre baixa 4).
Num foguetao de um so andar, 1− e−9.7/4.5 = 0.884, isto e, 88.4 % da massainicial total corresponde ao propelente, os restantes 11.6 % correspondem a massados motores, tanques e carga. Tal significa que a propulsao quımica apresenta seriaslimitacoes a conquista do espaco pois que a maior parte da massa do foguetao eapenas combustıvel!...
Exemplo 8: Um cadeado de comprimento L e densidade linear de massa (oumassa por unidade de comprimento) λ esta amontado numa superfıcie horizontal,onde pode deslizar (Fig. 11.13-(a)).
Fig. 11.13 Cadeado em queda: a) amontoado; b) alinhado sobre a superıcie.
No instante inicial, uma ponta do cadeado de comprimento zo esta pendente. Emseguida abandona-se o cadeado sob a accao da gravidade e este poe-se elo apos eloem movimento de queda.
a) Determine a velocidade e a energia cinetica da parte pendente do cadeado emfuncao do seu comprimento z. Calcule a energia cinetica do momento em que sobrea superfıcie esta 1/3 do comprimento total do cadeado.
QuadroNegro 5
4 Low Earth orbit (LEO) em ingles. Nesta orbita os objectos encontram-se entre 350 e 1400 kmacima da superfıcie da Terra. Os satelites na orbita LEO movem-se com a velocidade de 8 km/s.As orbitas inferiores a esta sao instaveis, pois ficam sujeitas ao arrastamento atmosferico.

11.3 Sistemas de massa variavel. Equacao do foguetao 203
b) Compare a variacao da energia cinetica da parte pendente do cadeado com otrabalho da forca gravıtica entre o instante inicial e o instante em que o ultimo elodo cadeado cai da mesa.
No instante inicial K(z = z0) = Ki e no instante final K f =λg3L (L
3−Z30). O tra-
balho da forca gravıtica e dado pelo integral:
W =∫ z=L
z=z0mgdz =
∫ Lz0
λ zgdz= λg
∫ Lz0
zdz = λg2 (L2− z2
0)
∆K = K f −Ki =λg3L (L
3− z30)
(11.75)
Este ultimo resultado mostra-nos que a variacao da energia cinetica nao iguala otrabalho realizado pela forca gravıtica, que so parcialmente tera sido usado paraaumentar a energia cinetica. A razao para esta discrepancia esta em que so se podeusar o Teorema trabalho-energia cinetica para sistemas de mass constante; e aquiestamos frente a um sistema de massa variavel, tal como o e o foguetao.
c) Suponha uma outra situacao em que a ponta pendente do cadeado (que agoraesta “em linha” sobre a mesa, Fig. 11.13-(b)). Determine a velocidade e a energiacinetica da parte pendente do cadeado em funcao do comprimento z.
Agora a massa total do cadeado m = λL poe-se em movimento sob a accao dopeso da parte pendente do cadeado, λ zg. Resolvendo pelo metodo mais usual, tem-se
ddt(λL
dzdt
) = λ zg (11.76)
ou sejaλL d2z
dt = λ zgd2zdt2 − g
L z = 0dvdt −
gL z = 0⇒ dv
dzdzdt −
gL z = 0
v dvdz −
gL z = 0
vdv− gL zdz = 0
v2
2 −gL
z2
2 =C1⇒ v2− gL z2 = 2C1.
(11.77)
Sendo as constantes iniciais z(t = 0) = z0 e v(t = 0) = v0 = 0, conclui-se que 2C1 =− g
L z20, ou seja
v2 = gL (z
2− z20)
∴ v =√
gL (z
2− z20).
(11.78)
A energia cinetica eK = 1
2 mv2 = 12 (λL) g
L (z2− z2
0)
∴ K = λg2 (z2− z2
0).(11.79)
Repare agora que no instante inicial, z = z0 e Ki = 0 e no instante final, z = L,K f =
λg2 (L2− z2
0), donde resulta
∆K = K f −Ki =λg2(L2− z2
0). (11.80)

204 11 Sistema de 2 partıculas. Centro de Massa
O trabalho realizado pela forca gravıtica e, por sua vez, dado por:
W =∫ L
z0(λ z)gdz = λg
∫ Lz0
zdz = λg[
z2
2
]= λg
2 (L2− z20)
∴W = ∆K,(11.81)
isto e, verifica-se o teorema trabalho-energia cinetica.Exemplo 9: Foguetao a peroxido de hidrogeneo. O peroxido de hidrogeneo e a
prata reagem fortemente libertando vapor de agua e oxigenio atomico. O peroxidode hidrogenio (cuja formula quımica e H2O2) tem que ter concentracao superiora 85 % 5. Quando o H2O2 entra em contacto com uma fina rede de prata, a pratareaje como um catalisador, libertando o atomo extra de oxigenio, produzindo agua,e libertando uma grande quantidade de energia (reaccao fortemente exoenergetica).O calor libertado converte a agua em vapor que e ejectada a alta velocidade peloejector.
Fig. 11.14 (a) Rocket propelido a peroxido de hidrogenio (repare na pequena dimensao do en-genho); (b) esquema de funcionamento.
Este e um motor a monopropelente, diferenciando-se dos rocketes normais quequeimam dois diferentes tipos de quımicos (um combustıvel e um oxidante). Estetipo de motor foi inicialmente usado pelos alemaes durante a Segunda GuerraMundial. Helmuth Walters desenvolveu em 1936 na WalterWerke de Kiel o motorauxiliar a peroxido de hidrogenio de 1000 kgf para o aviao Heinkel He 176. Tratava-se de um motor monopropelente frio que fazia uso de uma solucao de parmanganatode calcio como catalisador u 80% de H2O2.
A General Electric produziu um motor de foguetao hıbrido, onde o H2O2 e de-composto numa rede de prata e usando combustıvel organico de polietileno. Actual-mente, o interesse por este tipo de motor recrudesceu, por ser mais economico erelativamente seguro.
Exemplo 10: Correia transportadora planaCascalho (ou areia, granulado) esta a ser debitado continuamente para uma cor-
reia transportadora a taxa de 75.0 kg/s. A velocidade da correia e v = 22 m/s. Quale a forca necessaria para manter a correia em movimento?
O funil (Fig. 11.15) encontra-se em repouso, de modo que u = 0. A taxa dedebito do cascalho e dM/dt = 75.0 kg/s e a correia move-se a velocidade constante,dv/dt = 0.
O procedimento que sugerimos de modo a resolver esta questao consiste emcomecar por escrever a quantidade de movimento linear num instante t:
−→p (t) = m(t)−→v , (11.82)
e num instante posterior qualquer t +∆ t:
5 O que se compra nas farmacias tem 3 %.

11.3 Sistemas de massa variavel. Equacao do foguetao 205
−→p (t +∆ t) = (m+δ µ)(−→v +∆−→v ). (11.83)
Fig. 11.15 Correira transportando granulado.
Na Eq. 11.83, δ µ representa uma pequena quantidade de cascalho que cai dofunil sobre a correia transportadora durante o pequeno intervalo de tempo ∆ t. Aforca externa que actua sobre a correia transportadora,
−→F ext , devera igualar a taxa
de variacao do momento linear (ou quantidade de movimento linear) com o tempo:
−→F ext = [−→p (t +∆ t)−−→p (t)]/∆ t−→F ext = m ∆
−→v∆ t + δ µ
∆ t−→v .
(11.84)
Quando ∆ t→ 0, as diferencas finitas passam a infinitesimos, obtendo-se a seguinteequacao:
−→F ext = m
d−→vdt
+dµ
dt−→v . (11.85)
Projectando a forca na horizontal, obtem-se
Fextx =
dµ
dtv = 2.2×75.0 = 165N. (11.86)
Exemplo 11: Um foguetao tem a massa inicial mo = 21000 kg e a massa finalm f = 6000 kg (apos queima de combustıvel). A taxa de combustao e dm/dt =−190kg/s e a velocidade de exaustao dos gases e ve = 2800 m/s. Assuma g = 9.81 m/s2.
a) Tracao: vedmdt = (2800)(190) = 5.3×105 N.
b) Fext = mg = 2.1×104×9.81 = 2.1×105 N (no inıcio)Fext = (0.6×104)(9.81) = 5.9×104 N (apos queima do combustıvel)A forca lıquida sobre m e a seguinte:Condicoes iniciais: (5.3×105−2.1×105)= 3.2×105 N, resultando na aceleracao
a = 15.2 “gees”.Imediatamente antes da queima total do combustıvel: (5.3×105−5.9×104) =
4.7×105 N, resultando na aceleracao a≈ 80 “gees”.Apos a queima de combustıvel: −mg, ou seja a =−1 “gees”.O tempo total de queima do combustıvel e dado por t = 1.5×104kg
190kg/s = 79 s.Se vo = 0, a velocidade final sera:
v =−9.81(79)+(−2800) ln6000
21000= 2830m/s. (11.87)

206 11 Sistema de 2 partıculas. Centro de Massa
11.4 Centro de massa. Referencial do centro de massa.
Como ja referimos, em qualquer sistema de partıculas existe um ponto notavel, ocentro de massa do sistema que possui propriedades de grande importancia, emparticular no que diz respeito ao estudo das colisoes. A posicao desse ponto rel-ativamente a origem O de um dado referencial e caracterizada pelo vector posicao−→r cm =∑mi
−→r i/M. Quando o campo gravıtico e homogeneo na regiao ocupado pelocorpo, o centro de massa coincide com o centro de gravidade.
EQUACAO DO MOVIMENTO DO CM: Durante o movimento de qualquer sistemade partıculas o seu centro de massa move-se como se toda a massa estivesse con-centrada nesse ponto e sobre ele fossem aplicadas todas as forcas interna e externasque actuam sobre o sistema:
Md−→V cm
dt= ∑
i(−→F int
i +−→F ext
i ). (11.88)
Se−→F = 0, deduz-se que d
−→V cm/dt = 0, logo
−→V cm = const. e de
−→P = M
−→V cm,
tambem se conclui que−→P = const.
Podemos inferir facilmente que a posicao do CM e dado pela expressao:
−→R cm(t) =
−→V cmt +
−→R cm(0). (11.89)
Se um corpo se encontra em repouso num dado instante em relacao a um dadoreferencial de inercia, ele continuara em repouso desde que nao haja forcas actuandosobre ele.
As conclusoes anteriores permitem-nos resolver o seguinte problema classico.Exemplo 1: Um homem de massa m1 esta sobre uma balsa estreita de massa m2
que se encontra na superfıcie de um lago. O homem desloca-se de ∆−→r ′ relativa-
mente a balsa e depois detem-se. Despreza-se a resistencia da agua. Determine odeslocamento ∆
−→r 2 da balsa relativamente a margem.A resistencia da agua e desprezavel e a resultante de todas as outras forcas sobre
o sistema (homem+balsa) e nula. Se o sistema esta em repouso inicialmente:
−→R cm =
−→R cm(0) =
1m1 +m2
(m1−→r 1 +m2
−→r 2) (11.90)
onde −→r 1 e −→r 2 sao os vectores posicao do homem e da balsa relativamente a umponto fixo da margem.
Daqui podemos determinar a relacao entre os deslocamentos do homem e dabalsa:
m1∆−→r 1 +m2∆
−→r 2 = 0 (11.91)
Tendo em conta a Transformacao de Galileu:
∆−→r 1 = ∆
−→r 2 +∆−→r ′, (11.92)

11.4 Centro de massa. Referencial do centro de massa. 207
obtemos o deslocamento da balsa:
∆−→r 2 =−
m1
m1 +m2∆−→r ′. (11.93)
Em muitas situacoes interessa-nos o movimento relativo das partıculas dentro doproprio sistema, permitindo-nos assim simplificar consideravelmente os calculos in-volvidos. E conveniente associarmos um referencial com o proprio centro de massa.
SISTEMA DO CM: referencial rigidamente ligado ao centro de massa do sistemade partıcula e que se desloca relativamente ao referencial de inercia dado (o refer-encial onde estamos, que usualmente designamos o referencial do laboratorio).
A energia do sistema e dada pelo Teorema de Konig:
K = ∑i
12
miv2ic +
12
M−→V cm. (11.94)
Atendendo a que a energia potencial interna do sistema depende apenas da configuracaodo sistema, a energia potencial U e a mesma em todos os referenciais (digamos odo laboratorio e o do CM). Podemos entao escrever a energia mecanica total:
Em = E +12
MV 2cm, (11.95)
ondeE = ∑
i
12
miv2ic +U, (11.96)
onde−→v ic e a velocidade da partıcula i no referencial do CM e E representa a energiamecanica interna do sistema.


Chapter 12Colisoes
“There is nothing more difficult to plan, more doubtful of success, more dangerous to man-age than the creation of a new system. The innovator has the enmity of all who profit by thepreservation of the old system and only lukewarm defenders by those who would gain bythe new system. ”
- Machiavelli, 1513
“The scientists of today have substituted mathematics for experiments and they wander offthrough equation after equation and eventually build a mathematical structure which hasno relation to reality. They are metaphysicians rather than scientists.”
- Nikola Tesla, in Dr. Tesla, at 77, seldom sleeps, July 11th 1933, New York Times
12.0.1 Choques no referencial do centro de massa
Em muitos casos frequentes em que nos interessa descrever unicamente o movi-mento relativo das partıculas dentro do sistema, abstraindo-nos do movimento totaldo conjunto, mostra-se mais vantajoso utilizarmos o referencial do centro de massa,no qual o centro de inercia (ou CM) se encontra em repouso. Decorre desta escolhauma simplificacao notavel da analise do fenomeno fısico em si, assim como umagrande simplificacao dos calculos matematicos.
O referencial ligado rigidamente ao centro de massa do conjunto dado de partıculase que se desloca com movimento uniforme em relacao a um referencial de inerciadenomina-se referencial do centro de massa 1. Como ja vimos que
−→P = M
−→V c,
resulta daqui a propriedade fundamental do referencial C: o momento total de umconjunto de partıculas e zero. Ou seja, qualquer conjunto de partıculas como umtodo repouso no seu referencial CM.
Exemplo 2: Um sujeito de massa m1 encontra-se numa embarcacao de massam2 que esta na superfıcie de um lago. Suponha que o sujeito desloca-se de ∆
−→r ′ em
1 Usaremos neste Cap. indiferentemente ou c ou cm como notacao.
209

210 12 Colisoes
relacao a embarcacao e para em seguida. Despreze a resitencia da agua. Calcule odeslocamento que a embarcacao tera feito em relacao a margem.
QuadroNegro 1
Vamos em seguida determinar a relacao entre o valor da energia nos referenciaisdo LAB e do CM. Consideremos entao o conjunto de 2 partıculas de massas m1 em2 e analisemos o fenomeno da colisao no referencial do CM e no referencial dolaboratorio (em geral, aqui representado sumariamente pelas iniciais LAB):
−→v 1c,−→v 2c : velocidades no CM
−→v 1,−→v 2 : velocidades no LAB
−→V cm : velocidade do CM.
(12.1)
A energia cinetica do conjunto e dada, como ja vimos, pela expressao:
K = 12 MV 2
cm +Kint= 1
2 MV 2cm + 1
2 m1v21c +
12 m2v2
2c.(12.2)
Repare que−→v 1c e−→v 2c sao as velocidades relativas ao referencial do centro de massa(CM) e M = m1 +m2. O termo
12
MV 2cm (12.3)
representa a energia cinetica do movimento de translacao do CM, enquanto que osdois restantes representam uma forma de energia interna do conjunto. Na ausenciade forcas actuantes sobre o conjunto mecanico, a energia cinetica de translacaoconserva-se (pois que
−→V cm sera constante). Isto e, a energia cinetica de um con-
junto de partıculas e dada pelo soma da energia cinetica do conjunto das partıculas

12 Colisoes 211
medidas no referencial do CM e da energia cinetica do movimento do conjunto departıculas medidas como um todo.
Atendendo a que a energia potencial U do conjunto de partıculas depende uni-camente da sua configuracao, U devera ser o mesmo tanto no referencial do LAB,como no referencial do C. Ao somarmos U aos dois membros da Eq. 12.2 obtemosa formula de transformacao da energia mecanica total ao passarmos do referencialC para o LAB:
E = K +U = Kint +U +MV 2
c
2= E +
P2
2M, (12.4)
onde E = Kint +U representa a energia mecanica interna do sistema. Portanto E ea energia mecanica total no referencial do LAB.
Usamos em seguida as transformacoes de Galileu para passar do referencial doLAB ao referencial do CM (vd. Fig. 12.1):
−→v 1c =−→v 1−
−→V cm =−→v 1− m1
−→v 1+m2−→v 2
m1+m2= m2(
−→v 1−−→v 2)m1+m2−→v 2c =
−→v 2−−→V cm =−→v 2− m1
−→v 1+m2−→v 2
m1+m2=−m1(
−→v 1−−→v 2)m1+m2
(12.5)
∴ K =12
MV 2cm +
12
m1m2
m1 +m2(−→v 1−−→v 2)
2 (12.6)
O ultimo termo representa a energia maxima disponıvel numa colisao perfeitamenteinelastica.
Fig. 12.1 Velocidade no CM.
Sejam−→v rel =
−→v 1c−−→v 2c=−→v 1−−→v 2
(12.7)
as velocidades relativas das duas partıculas. Podemos entao escrever a Eq. 17.177na seguinte forma:
K =12
MV 2cm +
12
µv2rel , (12.8)
ondeµ =
m1m2
m1 +m2(12.9)
representa a massa reduzida do conjunto de duas partıculas.Exemplo 3: Num plano horizontal de atrito desprezavel encontram-se duas pe-
quenas esferas de massa m unidas por uma mola de massa desprezavel. Comunica-sea uma das massas a velocidade−→v o, como o mostra a Fig. 12.2. Determine a energiamecanica interna E associada ao movimento.
Fig. 12.2 Problema do exemplo 3.

212 12 Colisoes
O sistema e isolado - nao ha forcas externas aplicadas sobre ele - e o momentolinear conserva-se. A energia cinetica inicial e aquela que e comunicada a partıculam, K = mv2
o/2, e o momento e o que ele possui inicialmente, −→p = m−→v o. A energiainterna no referencial CM e dada pela Eq. 12.4:
E = E− P2
2M= E− mv2
o
4. (12.10)
e representa a energia de rotacao e de oscilacao da mola entretanto adquirida peloconjunto mecanico na sequencia da colisao.
Exemplo 4: Um conjunto mecanico e composto por duas esferas de massas m1 em2, unidas entre si por uma mola de massa desprezavel. Sao comunicadas as esferasas velocidades −→v 1 e −→v 2 (perpendiculares entre si), tal como o mostra a Fig. 12.3,e o conjunto comeca em movimento sob a acao do campo gravıtico terrestre. De-sprezando o atrito com o ar e supondo que no instante inicial a mola nao se encontradeformada, determine: 1) a velocidade do CM ao longo do tempo
−→V c; 2) a energia
mecanica do conjunto no processo do movimento.
Fig. 12.3 Problema do Exemplo 4.
Da equacao fundamental da dinamica, M d−→V cdt =
−→F ext = M−→g , deduzimos que
d−→V c =
−→g dt (12.11)
A integracao desta equacao da-nos de imediato:
−→V c(t)−
−→V c(0) =−→g t, (12.12)
onde−→V c(0) e a velocidade inicial do CM. Temos assim
−→V c(t) =
m1−→v 1 +m2
−→v 2
m1 +m2+−→g t (12.13)
Procuremos em seguida o valor da energia. A energia mecanica interna do conjunto(tal como e medida no referencial do CM) representa-se por E.
A colisao da massa m1 com a mola vai naturalmente deforma-la logo apos acolisao, pois que ha trabalho exercido. Denotando por
−→F 12 a forca exercida pela
massa m1 sobre m2 na sequencia da velocidade −→v 1 que e comunicada a m1 e quea faz deslocar-se de d−→r 2, a massa m2 por sua vez vai exercer uma reaccao −−→F 21sobre m1:
dW =−→F 12 ·d−→r 2 +
−→F 21 ·d−→r 1. (12.14)
Como pela lei da accao-reaccao tem-se−→F 12 =−
−→F 21, acabamos por obter
dW =−→F 12 ·d(−→r 2−−→r 1) =
−→F 12 ·d−→r , (12.15)

12 Colisoes 213
depois de introduzirmos a coordenada especial −→r = −→r 2−−→r 1. Este e o trabalhoefectuado pelas forcas internas produzidas pela mola. Sendo as forcas elasticas con-servativas temos
U(r) =−∫ −→
F 12 ·d−→r . (12.16)
Vemos assim, passo a passo, que podemos definir uma energia mecanica total E noreferencial do CM:
E = Kint +U(r), (12.17)
onde U(r) = 12 ks2, sendo r = ro + s, e ro o comprimento natural da mola. Como
vimosKint =
12
µ(−→v 1−−→v 2)2. (12.18)
A energia mecanica total do conjunto de 2-corpos e constante porque os campos saoconservativos, ∆ E, e por conseguinte a energia nao variara, bastando-nos utilizar ovalor inicial da energia:
E =m1m2
2(m1 +m2)(v2
1 + v22)+
12
ks2, (12.19)
com s = 0, pois que foi dito que no inıcio nao ha deformacao da mola. No caso dehaver uma deformacao inicial da mola, a energia interna sera dada com generalidadepela Eq. 17.190, ∀s.
Em qualquer tipo de colisao - elastica ou inelastica - quando as forcas externassao desprezaveis, o momento linear total conserva-se e, portanto temos:
−→P = m1
−→v 1 +m2−→v 2 (12.20)
Repare que o valor de−→P depende do sistema de coordenadas escolhido. A conservacao
do momento linear e verificada para todos os sistemas de referencia inerciais 2.Se nos colocarmos no referencial do CM podemos obter as solucoes das equacoes
de conservacao do momento linear ou da energia de um modo mais intuitivo. Paraduas partıculas o CM do conjunto define-se da seguinte forma:
−→r cm = m1−→r 1+m2
−→r 2m1+m2−→
V cm = m1−→v 1+m2
−→v 2m1+m2
.(12.21)
No referencial do CM o momento e dado pelas seguintes expressoes (onde passamosa abreviar por c o referencial do CM):
−→p 1c = m1−→v 1c =
m1m2m1+m2
(−→v 1−−→v 2) = µ−→v rel
−→p 2c = m2−→v 2c =− m1m2
m1+m2(−→v 1−−→v 2) =−µ
−→v rel .(12.22)
2 O teorema de Noether mostra que as leis de conservacao resultam das simetrias dos sistemasfısicos.

214 12 Colisoes
Deste modo, os momentos da ambas as partıculas no referencial do CM sao iguaise dirigidos em sentidos contrarios, onde vrel =| −→v 1−−→v 2 | e a velocidade de umapartıcula em relacao a outra.
As Eqs. 13.21 mostram que o momento total no referencial do CM e zero:
−→P c =
−→p 1c +−→p 2c = 0, (12.23)
enquanto que o momento total no referencial do laboratorio (por ex., a Terra), e
−→P L = m1
−→v 1 +m2−→v 2 =
−→p 1 +−→p 2 = (m1 +m2)
−→V c (12.24)
Como ja referimos, as colisoes podem ser analisadas de modo mais simplifi-cado no referencial do CM. As velocidades iniciais e finais determinam o plano decolisao. Cada partıcula e caracterizado pelo seu respectivo angulo de colisao (oudifusao) 3 θ ou Θ no referencial do LAB. Segundo uma terminologia introduzidapelo premio Nobel indiano Subrahmanyan Chandrasekhar, chama-se partıcula testea partıcula de massa m2 (que frequentemente considera-se em repouso) e partıculado campo a partıcula de massa m1.
1) Colisao elastica (Fig. 12.4-(a)):Na ausencia de forcas externas, o CM move-se com rapidez constante Vcm, antes,
durante e apos a colisao. Verifica-se
| −→p 1c |=| −→p ′1c || −→p 2c |=| −→p ′2c |
(12.25)
Os modulos (comprimentos) dos momentos lineares antes e apos a colisao saoiguais. A energia conserva-se. O somatorio dos momentos na colisao e zero:
−→P =
−→p 1c +−→p 2c = 0. Verifica-se portanto
−→p ′1c =−−→p 1c−→p ′2c =−−→p 2c⇒−→v ′1c =−−→v 1c⇒−→v ′2c =−−→v 2c.
(12.26)
As velocidade das partıculas no referencial do CM resultam das Eqs. 13.21. Asultimas relacoes que estao nas Eqs. 13.25 resultam de
m1−→v 1c +m2
−→v 2c = 0⇒ m1v1c−m2v2c = 0.m1−→v ′1c +m2
−→v ′2c = 0⇒ m1v′1c−m2v′2c = 0. (12.27)
Destas equacoes obtemosv2c =
m1m2
v1c
v′2c =m1m2
v′1c.(12.28)
Introduzindo-as em
3 Em ingles, chama-se “scattering angle”.

12 Colisoes 215
12
m1v21c +
12
m2v22c =
12
m2v′21c +12
v′22c,
obtem-se logo o que procuravamos:
v1c = v′1c; v′2c = v2c
Isto quer dizer que, numa colisao elastica, no referencial do CM a rapidez de cadapartıcula e a mesma antes e depois da colisao e que os vectores velocidade apenasrodam no plano de colisao.
E frequente uma das partıculas estar parada e, neste caso, a rapidez do CM econstante:
Vc =m1v1
m1 +m2, (12.29)
sendo que−→v 1c =
m2
m1 +m2
−→v 1, (12.30)
e−→v 2c =−
m2
m1 +m2
−→v 1, (12.31)
pois que −→p 1c = m1−→v 1c = m1m2(
−→v 1−−→v 2)/(m1 +m2). Daqui resulta a relacao
Vc
v1c=
m1v1
m1 +m2
m1 +m2
m2v1=
m1
m2,
que sera usada mais adiante.Na colisao frontal ambas as partıculas antes e depois da colisao movem-se so-
bre a mesma linha recta. Na colisao nao frontal, no referencial do CM ambas aspartıculas tem igual modulo e estao dirigidas em sentido contrario antes e depoisda colisao. Apos a colisao, −→p 1c faz um angulo Θ com a direccao da incidente noreferencial do CM. O angulo Θ feito no CM depende do tipo de interaccao entre aspartıculas e da sua posicao relativa (Fig. 12.4). Θ pode tomar qualquer valor entre 0e π: 0≤Θ ≤ π .
Fig. 12.4 Colisoes no CM.
2) Colisao inelastica (Fig. 12.4-(b)):Os modulos do momento linear sao reduzidos apos a colisao devido a perda da
energia cinetica (modificacao da energia interna das partıculas, por ex., aumento daenergia termica, fracturas, criacao de estados atomicos e moleculares excitados,...).
Vejamos em seguida com mais detalhe o caso da colisao elastica.Exemplo 5: Limites do angulo de difusao no referencial do laboratorio (LAB).Consideremos a colisao elastica de uma partıcula de massa m1 e velocidade −→v 1
com uma outra, de massa m2, que esta parada. Em muitas experiencias de fısica departıculas (e nuclear) e frequente esta situacao. O angulo de difusao Θ no referencial

216 12 Colisoes
do CM nao tem restricoes, mas no referencial do laboratorio (abreviadamente LAB)as leis de conservacao impoem limites que vamos agora calcular (Fig. 12.6-(a)).
A velocidade do massa nestas condicoes e dada por
−→V cm =
m1
m1 +m2
−→v 1 (12.32)
As velocidade iniciais de cada partıcula no referencial do CM sao dadas por:
−→v 1c =m2
m1+m2
−→v 1 =m2m1
−→V cm
−→v 2c =− m1m1+m2
−→v 1.(12.33)
Se designarmos com generalidade por −→n 0 o vector unitario que tem a direccaoda velocidade da partıcula m1 apos o choque, as velocidades das partıculas apos ochoque serao dadas por:
−→v ′1c =m2
m1+m2v1−→n 0
−→v ′2c =−m1
m1+m2v1−→n 0.
(12.34)
Podemos em seguida voltar ao referencial do LAB usando as transformacoes deGalileu:
−→v ′1 =m2
m1+m2+−→V cm
−→v ′2 =−m1
m1+m2v1−→n 0 +
−→V cm.
(12.35)
Mais uma vez chamamos a atencao de que a direccao do vector unitario−→n 0 dependeda lei da interaccao entre as partıculas. Repare que se verifica−→p ′1+
−→p ′2 =−→p 1 (pois
que supomos a partıcula m2 em repouso no referencial do LAB).Multiplicando as Eqs. 12.35 por m1 e m2, respectivamente, obtemos:
−→p ′1 = µv1−→n 0 +
m1m1+m2
−→p 1−→p ′2 =−µv1
−→n 0 +m2
m1+m2
−→p 1.(12.36)
As relacoes vectoriais acima descritas sugerem uma interpretacao geometrica, comose mostra na Fig. 12.5-(a). Podemos por comecar por tracar uma circunferencia deraio µv1. Em seguida, se orientarmos o vector unitario −→n 0 ao longo da direccao−→OC, os vectores
−→AC e
−→CB correspondem respectivamente aos momentos lineares
−→p ′1 e −→p ′2. Para um dado vector −→p 1, o raio OC e a posicao do ponto A permaneceminvariaveis, enquanto que o ponto C pode ocupar qualquer posicao sobre a cir-cunferencia (depende de facto da lei de interaccao). Concluımos da construcaogeometrica que se m1 <m2 o ponto A estara dentro da circunferencia, mas encontrar-se-a fora dela se pelo contrario m1 > m2.
Fig. 12.5 Interpretacao geometrica da colisao elastica.
Agora repare no diagrama tracado na Fig. 12.6-(b).

12 Colisoes 217
Fig. 12.6 Diagrama vectorial das velocidades.
Ve-se que a relacao que existe entre o angulo de difusao que a partıcula incidentefaz no referencial do laboratorio, θ , e o angulo que faz no referencial do CM, Θ , ea seguinte:
tanθ =v′1c sinΘ
V + v′1c cosΘ. (12.37)
Como a colisao e elastica verifica-se v′1c = v1c e V/v1c = m1/m2, entao
tanθ =sinΘ
γ + cosΘ, (12.38)
onde pusemos γ = m1/m2.Quando a colisao e inelastica, mostra-se que a Eq. 12.38 permanece valida,
porem deve-se substituir o γ = m1/m2 pelo novo γ:
γ =m1
m2
[1− Q
K1i
(1+
m1
m2
)]−1/2
. (12.39)
Esta relacao e valida no ambito nao-relativista e pode ser usada em particular nasreaccoes nucleares no decurso da qual uma partıcula de massa m1 interage com umapartıcula de massa m2 para dar duas partıculas de massas m3 e m4. Q tem o nome decalor de reaccao.
CALOR DE REACCAO: Define-se calor de reaccao a quantidade de energiacinetica convertida noutra forma de energia:
Ki = K f +Q,Q = Ki−K f .
(12.40)
Tendo em conta a Eq. 17.189 concluımos igualmente que
Q =12
µv2rel =
12
µ | −→v 1−−→v 2 |2 . (12.41)
A magnitude de Q depende apenas da velocidade relativa entre as duas partıculasque colidem.
Na maior parte das vezes Q e positiva (colisao exoenergetica) e a energia cineticae perdida. Porem, Q tambem pode ser nulo ou, em particular, negativo (colisaoendoenergetica) se a energia interna do sistema for convertida em energia cinetica,no que se chama uma colisao superelastica, reaccao de grande importancia emfısica atomica e nuclear.
CASOS LIMITES EM COLISOES ELASTICAS : E interessante considerarmos oscasos particulares seguintes (lembrando que 0≤Θ ≤ π):
Nm1 m2 :⇒ θ ≈Θ . (12.42)

218 12 Colisoes
Isto significa que, quando o projectil e muito mais leve do que o alvo, o referencialdo CM e do LAB coincidem praticamente.
Nm1 = m2 :
⇒ θ =Θ
2, (12.43)
ou 0 < θ ≤ π/2, o que significa que, quando as massas sao iguais, nao ocorre re-versao da direccao do movimento 4.
Nm1 > m2 :
⇒ θmax = arcsin(
m2
m1
), (12.44)
ou 0 < θ ≤ θmax. Neste caso existe um angulo maximo de difusao (ou angulolimite).
Nm1 m2 :⇒ θ ≈ m2
m1sinΘ . (12.45)
4 Em ingles diz-se “backscattering”.

Chapter 13Colisoes. Continuacao
“.... we are a part of nature as a whole, whose order we follow”.
- (Espinosa, Ethics, 1673)
13.1 Nocao de impulso. Colisoes
Quando dois objectos colidem as forcas que eles exercem um sobre o outro du-ram usualmente um pequeno intervalo de tempo. A fim de caracterizar a accaoexercida por uma forca sobre um corpo durante um determinado intervalo detempo, introduziu-se a nocao de impulsao de uma forca. Forcas desta naturezasao chamadas de forcas impulsivas, ou forcas de percussao.
IMPULSO E TRABALHO: quando uma forca actua sobre um corpo surgem doisresultados completamente distintos chamados impulso (∆−→p ) e trabalho (W ).
Durante a colisao a forca impulsiva produz uma variacao grande do movimentodo objecto.
Chama-seIMPULSAO ELEMENTAR DE UMA FORCA a uma grandeza vectorial d−→p dada
pelo produto da forca−→F pelo intervalo de tempo elementar dt:
d−→p =−→F dt. (13.1)
A impulsao de uma forca que actua durante um intervalo de tempo finito t f − ti e
−→p f −−→p i =∫ t f
tid−→p =
∫ t f
ti
−→F dt. (13.2)
Podemos tambem escrever−→I =
∫ t fti−→F (t)dt
∆−→p =−→p f −−→p i =
−→I .
(13.3)
219

220 13 Colisoes. Continuacao
A variacao do momento linear do objecto e igual ao impulso que actua sobre ele.Este resultado traduz oTEOREMA DO MOMENTO LINEAR DE UM PONTO MATERIAL NO DECORRER
DE UM CHOQUE: A variacao do momento linear do objecto e igual ao impulso queactua sobre ele.
E a equacao fundamental da teoria das colisoes, tendo o mesmo papel que aequacao m−→a =
−→F no estudo do movimento produzido por forcas que nao sejam de
percussao.O produto da forca
−→F pelo intervalo de tempo ∆ t resulta na impulsao
−→I 1.
MOMENTO LINEAR: o vector −→p = m−→v e chamado momento linear 2. Ha quereferir em relacao a qual referencial ele e definido (se a Terra, um vagao, laboratorio,CM).
Exemplo 1: Um sujeito empurrando um vagao de massa m desde o repouso com
a forca−→F constante, tera comunicado a velocidade v ao fim do tempo ∆ t:
∆ t =mvF
, (13.4)
porque, de acordo com o teorema anteriormente exposto, a impulsao I =F∆ t e iguala variacao da quantidade de movimento comunicada ao vagao. O trabalho efectuadoe igual a variacao da energia cinetica adquirida pelo vagao:
W =12
mv2−0 =(mv)2
2m=
I2
2m. (13.5)
Para uma mesma impulsao corresponde um trabalho tanto maior quanto menor fora massa do vagao.
Por vezes e conveniente definir uma forca media F actuante durante o intervalode tempo ∆ t = t f − ti produzindo o mesmo impulso e igualmente a mesma variacaodo momento:
F = 1∆ t∫ t f
ti F(t)dtF∆ t = (−→p f −−→p i) =
−→I .
(13.6)
Examinemos agora o choque de duas esferas duras A1 e A2. Durante a colisao, A1
fica sujeita a reaccao−→N exercida por A2. Podemos ainda admitir que o sistema das
duas esferas nao esta isolado, exercendo-se eventualmente forcas electricas ou opeso,
−→F . Em cada instante verifica-se
−→F +−→N = m1
d−→v 1
dt(13.7)
donde
1 Os criadores da mecanica tiveram uma grande dificuldade em distinguir as duas nocoes de im-pulsao possıveis, o produto da forca pelo tempo e o produto da forca pelo deslocamento.2 Ou ainda momento cinetico, quantidade de movimento linear, ou simplesmente momento. Prefe-rimos chama-lo por momento linear de modo a sermos consistentes com a designacao do momentoangular que usaremos no estudo da dinamica rotacional.

13.1 Nocao de impulso. Colisoes 221∫ t ′
t(−→F +−→N )dt = m1
∫ t ′
t
d−→v 1
dtdt. (13.8)
Daqui obtem-se
−→I 1 = m1[
−→v 1(t ′)−−→v 1(t)] =∫ t ′
t(−→F +−→N )dt. (13.9)
Como a duracao do choque τ = t ′ − t e muito pequena podemos admitir que ochoque e instantaneo, supondo que a forca
−→F permanece finita, isto e, admitindo
que
limt ′→t
∫ t ′
t
−→F dt =
−→0 . (13.10)
Assim, da Eq. 13.15 obtem-se
−→I 1 = m1(
−→v ′1−−→v 1) = limt ′→t
−→N dt. (13.11)
De acordo com a lei da accao-reaccao, a esfera A2 devera ficar sujeita a percussao−−→I 2: −→
I 1 =−−→I 2
∴ m1−→v 1 +m2
−→v 2 = m1−→v ′1 +m2
−→v ′2(13.12)
A ultima expressao traduz a conservacao do momento linear, sendo as velocidadesaquelas que sao verificadas imediatamente antes e imediatamente apos o choque.Repare que, admitindo que a duracao da colisao e muito pequena, pode-se desprezara variacao da energia potencial durante o choque.
Exemplo 2: Um problema com importancia pratica diz respeito ao manusea-mento de material (e seguranca) no espaco sideral, quando o peso desvanece mas amassa do objecto permanece. Quando a massa desse material tem toneladas, comoacontece na construcao de uma estacao espacial, podem ocorrer situacoes que sur-preendem a nossa intuicao. Imagine que voce e um astronauta a trabalhar numaestacao espacial, manipulando 10 toneladas de massa m de uma estrutura que seencontra no exterior da estacao espacial (aqui supostamente com uma massa totalmuito superior ao da referida estrutura). Suponha que voce se encontra posicionadocontra uma parede da estacao espacial. A massa aproxima-se de si com a veloci-dade de 30 cm/s e ameaca-o esmagar contra a parede. A questao que lhe ocorrede imediato e a seguinte: “poderei parar esta estrutura ou deverei saltar para o ladode imediato?”. Suponha que aplica uma forca constante F de 450 N (equivalentea levantar um peso de 45 kg) de forma constante (e desacelerando). Os seguintescalculos monstram-nos o seguinte:
a = Fm = 0.045m/s2
s = v2
2a = 1m.(13.13)
E suficiente 1 metro para parar completamente as 10 toneladas de material ! Umafacanha que esta ao alcance de uma pessoa normal...

222 13 Colisoes. Continuacao
Exemplo 3: Uma bola de massa 100 g e atirada para o solo de uma altura h = 2m. A bola ressalta ate uma altura h = 1.5 m. Assuma que o tempo de colisao e 0.01 s(alias um valor tıpico). Determine a velocidade imediatamente antes da colisao como solo:
12 mv2
i = mghvi =√
2gh = 6.26m/s(13.14)
Depois do ressalto, a bola adquire a velocidade
12 mv2
f = mgh′
v f =√
2gh′ = 5.42m/s.(13.15)
O momento inicial e final sao ambos dados por:
−→p i = m−→v i =−0.63−→k (kg.m/s)
−→p f = m−→v f = 0.54−→k (kg.m/s).
(13.16)
O impulso−→I = ∆
−→p =−→p f −−→p i =−→F ∆ t resulta em
∆−→p = [0.54− (−0.63)]
−→k
= 1.17−→k (kg.m/s)
∴−→F = ∆
−→p∆ t = 1.17
−→k
0.01 = 117−→k (N)
(13.17)
o que representa uma forca muito maior do que a forca da gravidade!Nas colisoes normalmente e mais facil medir a massa e a variacao da velocidade
do que a forca. Se o tempo durante a qual a forca actua e medido, pode-se determinara forca media.
Se um impacto para um objecto em movimento, a variacao do momento e umaquantidade fixa. Ao dilatarmos o tempo de colisao diminuimos o valor da forca deimpacto. Aplicamos com frequencia este princıpio em muitas situacoes:
• quando caımos para o solo de uma certa altura normalmente dobramos os joelhosde modo a aumentar o tempo de colisao e reduzindo a forca de impacto;
• os automoveis sao projectados para serem destruıdos durante a colisao, aumen-tando o tempo de colisao e reduzindo a forca de impacto.
13.1.1 Colisoes
Chama-se choque ou colisao ao fenomeno durante o qual a velocidade de um corposofre uma variacao finita num intervalo de tempo ∆ t muito curto. Como ja referi-mos, as forcas que actuam sobre os corpos sao forcas de percussao e o intervalo detempo ∆ t e o tempo de impacto (ou tempo de choque).

13.1 Nocao de impulso. Colisoes 223
Iremos em seguida estudar as colisoes entre objectos. Muitas vezes a conservacaodo momento e suficiente, mas em geral temos que recorrer a equacao de conservacaoda energia.
Existem basicamente dois tipos de colisao:
Colisoes elasticas 1) assume-se que as forcas de interaccao sao conservativas; 2)a energia cinetica total antes e depois da colisao e a mesma; 3) o momento econservado.
Colisoes inelasticas 1) o momento e conservado; 2) a energia cinetica total depoisda colisao e menor que antes da colisao ocorrer:
−→P i =
−→P f e Ki 6= K f .
13.1.2 Colisoes elasticas
COLISOES ELASTICAS: A energia total e conservada, assim como o momento lineartotal.
Comecamos por analisar o caso a 1 dimensao. Assumimos que as partıculasmovem-se com velocidade −→v 1 e −→v 2 antes da colisao, tendo apos a colisao as ve-locidades respectivas−→v ′1 e−→v ′2. Se v > 0 a partıcula move-se para a direita; se v < 0,a partıcula move-se para a esquerda.
1) Conservacao do momento:−→P i =
−→P f
m1−→v 1 +m2
−→v 2 = m1−→v ′1 +m2
−→v ′2. (13.18)
2) Conservacao da energia: Ki = K f
12
m1v21 +
12
m2v22 =
12
m1v′21 +12
m2v′22 (13.19)
Temos 2 equacoes e 2 incognitas: o problema esta bem definido:
(v1,v2)⇒ (v′1,v′2). (13.20)
Fig. 13.1 Colisoes elasticas a 2-dim.
E conveniente reescrever a Eq. 13.18 na forma
m1(−→v 1−−→v ′1) = m2(
−→v ′2−−→v 2) (13.21)
e a Eq. 13.19 na forma
m1(−→v 2
1−−→v ′21 ) = m2(−→v ′22 −−→v 2
2) (13.22)
Ao dividirmos a Eq. 13.22 pela Eq. 13.21 obtemos

224 13 Colisoes. Continuacao
v1 + v′1 = v′2 + v2 (13.23)
ou seja−→v 1−−→v 2 =−(−→v ′1−−→v ′2). (13.24)
A velocidade relativa de duas partıculas depois da colisao e o negativo da velocidaderelativa antes da colisao para qualquer colisao directa (ou central), quaisquer quesejam as massas.
A impulsao de percussao que ocorre durante a colisao de dois corpos depende dassuas massas, das suas velocidades antes do choque e das propriedades elasticas quese caracterizam por meio do chamado coeficiente de restituicao, k. A razao da suaexistencia e a seguinte: quando uma bola de massa M em movimento de translacaocolide com o solo (suposto perfeitamente rıgido) as velocidades das partıculas que aconstituem, que no inıcio tem um dado valor−→v , diminuem ate zero. A bola comecaa deformar-se e toda a sua energia cinetica inicial 1
2 Mv2 transforma-se em energiapotencial interna do corpo deformado. Em seguida, terminada esta fase, a energiapotencial elastica interna converte-se de novo em energia cinetica de movimento daspartıculas da bola, sendo agora−→u a velocidade resultante do conjunto das partıculase a sua energia 1
2 Mu2. Porem, uma parte da energia mecanica total da bola nao e re-cuperada inteiramente pois foi usada em produzir deformacoes residuais, aumentara energia termica da bola e na emissao de ondas acusticas, essencialmente. Entao eexpectavel que u seja inferior a v. No caso de um choque frontal de um corpo contraoutro corpo fixo (solo, por ex.), define-se o coeficiente de restituicao k:
k =uv. (13.25)
A tabela 14.1 da alguns valores de k para velocidades de choque da ordem de 3 m/s.
Table 13.1 Coeficientes de restituicao para alguns materiais para velocidades da ordem de 3 m/s.
corpos em contacto kmadeira contra madeira 0.5
aco contra aco 5/9marfim contra marfim 8/9
vidro contra vidro 15/16bola de basquete 0.76
Se introduzirmos no sistema de equacoes anteriores o coeficiente de restituicaok, teremos
k =| v′1− v′2 || v1− v2 |
=−v′1− v′2v1− v2
(13.26)
podendo nos entao escrevermos a Eq. 13.24 na forma mais geral
v′1− v′2 =−k(v1− v2). (13.27)

13.1 Nocao de impulso. Colisoes 225
Podemos considerar dois casos limite.1) Colisao perfeitamente inelastica (k = 0).Das Eqs. 13.21- 13.27 obtemos
v′1 = v′2 =m1v1 +m2v2
m1 +m2(13.28)
Apos a colisao, as duas partıculas movem-se com a mesma velocidade (que e avelocidade do CM).
2) Colisao perfeitamente elastica (k = 1).As duas Eqs. 13.21- 13.27 conduzem-nos ao resultado
v′1 = v1− 2m2m1+m2
(v1− v2)
v′2 = v2 +2m1
m1+m2(v1− v2)
(13.29)
Analisemos seguidamente 2 casos particulares que se encontram com frequencia:a) Massas iguais, m1 = m2As Eqs. 13.29 levam-nos a concluir que v′1 = v2 e v′2 = v1, isto e as 2 partıculas
trocam entre si as velocidades com que iam animadas.Se a segunda partıcula encontra-se em repouso inicialmente, −→v 2 = 0, e
v′2 = v1v′1 = 0 (13.30)
A primeira partıcula para e a segunda move-se para a frente com a velocidade daprimeira.
b) Consideremos agora a situacao das partıculas terem massas diferentes, mas−→v 2 = 0.
A conservacao do momento da-nos
m1v1 = m1v′1 +m2v′2 (13.31)
A Eq. 13.27, e atendendo a que k = 1, conduz-nos a
v1 =−v′1 + v′2 (13.32)
A resolucao deste sistema de duas equacoes da-nos
v′2 = v1
(2m1
m1+m2
)v′1 = v1
(m1−m2m1+m2
) (13.33)
i) Se v2 = 0 e m1 = m2 obtemos o mesmo resultado encontrado no caso da alınea a).ii) Se v2 = 0, e m1 m2, situacao semelhante ao embate de um objecto pesado
contra um objecto leve. Da Eq. 13.33, obtemos

226 13 Colisoes. Continuacao
v′2 ≈ 2v1v′1 ≈ v1.
(13.34)
Isto quer dizer que a velocidade da partıcula pesada que colide nao e substancial-mente modificada, mas que a partıcula de massa menor move-se para a frente compraticamente o dobro da velocidade do objecto pesado.
iii) Se v2 = 0 e m1 m2, a partıcula leve que colide contra um objecto pesado,entao:
• v′2 ∼ 0, v′1 ∼−v1: o objecto pesado permanece praticamente em repouso;• a partıcula leve reverte a direccao do movimento e move-se com a velocidade
com que incidiu inicialmente.
c) Solucao geral:
QuadroNegro 1

13.1 Nocao de impulso. Colisoes 227
A resolucao das equacoes algebricas obtidas acima dao as velocidades daspartıcula apos o choque:
v′1 = v1m1−m2m1+m2
+ v22m2
m1+m2
v′2 = v12m1
m1+m2+ v2
m2−m1m1+m2
.(13.35)
Neste exemplo aplicamos a Regra de Cramer 3 que da a solucao de um sistemade equacoes lineares em termos de determinantes.
DETERMINANTE: E uma funcao que associa a cada matriz quadrada um escalar.Por exemplo, seja a matriz A: [
a bc d
](13.36)
O seu determinante, det(A), e: ∣∣∣∣a bc d
∣∣∣∣ (13.37)
MATRIZ: E uma tabela de (m× n) sımbolos sobre um corpo F . O sımbolo ai jrepresenta o (i,j)-esimo elemento de A. Por exemplo,[
a11 a12 a13a21 a22 a23
](13.38)
e uma matriz de ordem (2×3), tendo 2 linhas e 3 colunas.REGRA DE CRAMER: Se A−→x =
−→b e um sistema de equacoes algebricas, entao
a solucao do sistema e:
x j =| A j || A |
, (13.39)
onde A j e a matriz que se obtem da matriz A substituindo a coluna j pela coluna dostermos independentes b (veja o exemplo anterior para ilustracao).
Exemplo 4: Num choque frontal entre duas esferas solidas, as velocidades antese apos o choque encontram-se relacionadas pelas expressoes:
v′1− v1 =−e(v1− v2) (13.40)
onde 0 < e < 1 e o coeficiente de restituicao.a) Calcule v′1 e v′2 em funcao de v1 e v2, m1, m2 e e.
m1v1 +m2v2 = m1v′1 +m2v′2−e(v1− v2) = v′1− v′2
∴ v′1 =v1(m1−em2)+m2v2(1+e)
m1+m2
v′2 =m1v1(1+e)+v2(m2−m1e)
m1+m2
(13.41)
b) Calcule a variacao da energia cinetica do sistema ∆K = K f −Ki.
3 Gabriel Cramer (1704 - 1752), matematico suıco,nascido em Genebra.

228 13 Colisoes. Continuacao
2∆K = m2v′22 +m1v′21 − (m1v21 +m2v2
2)= m2(v′22 − v2
2)+m1(v′21 − v21)
= m2(v′2− v2)(v′2 + v2)+m1(v′1− v1)(v′1 + v1)(13.42)
Como verifica-se a conservacao do momento linear:
m2(v′2− v2) =−m1(v′1− v1) (13.43)
podemos modificar a Eq. 13.42:
2∆K = m1(v′1− v1)[v1− v2− e(v1− v2)]= m1(v1− v2)(1− e)(v′1− v1)
(13.44)
Embora com calculos algebraicamente morosos, podemos usar a Eq. 13.41
v′1− v1 =m2(1+ e)(v2− v1)
m1 +m2
obtendo-se finalmente a expressao pedida:
∆K =−12
m1m2
m1 +m2(1− e2)(v1− v2)
2. (13.45)
Exemplo 5: Colisao perfeitamente inelastica a 1-dim.Duas partıculas de massas m1 e m2 movem-se com velocidades −→v 1i e −→v 2i ao
longo de uma recta (Vd. Fig. 13.2). Elas colidem e ficam coladas uma a outra comvelocidade final −→v f apos colisao.
O momento total conserva-se:
−→P i =
−→P f (13.46)
obtendo-se sucessivamente
m1−→v 1i +m2
−→v 2i = (m1 +m2)−→v f
−→v f =m1−→v 1i+m2
−→v 2im1+m2
(13.47)
Exemplo 6: Considere o corpo 2 em repouso, −→v 2i = 0. Entao, −→v f =m1−→v 1i
m1+m2. As
energias cineticas respectivas sao:
Ki =12 m1v2
1i
K f =12 (m1 +m2)
m21v2
1i(m1+m2)2
K fKi
= m1m1+m2
< 1.
(13.48)
Neste tipo de colisoes a energia cinetica final e sempre inferior a energia cineticainicial. Nas colisoes perfeitamente inelasticas a energia cinetica dos corpos tem asua perda maxima. A variacao da energia cinetica e dada por

13.1 Nocao de impulso. Colisoes 229
Ki−K f =12
m1(v1i− v f )2 +
12
m2(v2i− v f )2. (13.49)
Se −→v 2i = 0, entao:K f =
m1
m1 +m2Ki (13.50)
Fig. 13.2 Choque perfeitamente inelastico.
Vejamos dois exemplos de grande interesse pratico:Exemplo 7: m1 m2: Neste caso pode admitir-se que m1 + m2 ≈ m1 e a
Eq. 13.50 conduz a K f ≈ Ki. Isto significa que a perda de energia cinetica e in-significante e apos o choque o conjunto mecanico desloca-se com sensivelmente amesma energia cinetica que possuıa no inıcio do choque. E o que se procura fazerao meter pregos, estacas, usando martelos com uma massa muito maior que a domartelo.
Exemplo 8: m2 m1: neste caso tem-se K f ≈ 0, usando-se a energia cineticapara deformar os corpos que chocam. Na pratica, tal acontece durante a forjadura,rebitagem, em que a massa da peca a forjar e da bigorna (ou a massa do rebite e seusuporte) e muito maior do que a massa do martelo.
Fig. 13.3 (a): meter pregos; (b): martelo e bigorna.
Exemplo 9: Colisao elastica directa (ou central) a 1-dim.O choque de dois corpos diz-se directo ou central quando a normal comum as
superfıcies dos corpos no ponto de contacto passa pelos seus centros de massa e asvelocidades dos CM’s no inıcio da colisao tem a direcao desta normal comum.
Conservacao do momento:
(5kg)(2m/s)+(3kg)(−2m/s) = 5vA2 +3vB25vA2 +3vB2 = 4m/s (13.51)
A colisao e completamente elastica:
vB2− vA2 =−(vB1− vA1)=−(−2−2) = 4m/s. (13.52)
Resolvendo:vA2 =−1m/svB2 = 3m/s. (13.53)
As energias cinetica sao as seguintes:

230 13 Colisoes. Continuacao
Ki =12 mAv2
A1 +12 mBv2
B1 =12 ×5×22 + 1
2 ×3×22 = 16JK f =
12 mAv2
A2 +12 mBv2
B2 =12 ×5×12 + 1
2 ×3×32 = 16J∴ Ki = K f
(13.54)
Exemplo 10: Deixa-se cair uma bola sem velocidade inicial de uma altura h0acima de uma superfıcie horizontal. A bola toca o plano com uma velocidade v0,ressalta e parte para cima com uma velocidade v1 = ev0 (e denota o coeficiente derestituicao). Estude a sucessao dos ressaltos.
O choque da bola sobre o plano e acompanhado pela dissipacao da energiacinetica:
mv21 < mv2
0⇒ e < 1. (13.55)
Vamos admitir que a velocidade (em valor absoluto) apos o salto n a dada por:
vn = evn−1 (13.56)
A energia cinetica Kn = mv2n/2 converte-se em energia potencial gravıtica:
mghn =12
mv2n, (13.57)
obtendo-se em seguidahn
hn−1= v2
nv2
n−1= e2
∴ hn = hn−1e2(13.58)
ou seja, temos a seguinte sucessao das alturas maximas sucessivas atingidas pelabola:
h0h1 = h0e2
h2 = h0e4
...,hn = h0e2n.
(13.59)
A bola reparte para o alto com uma velocidade vn apos o salto n, segundo a lei
v = vn−gt (13.60)
atingindo o maximo de altura no instante t = vn/g, isto e, a duracao do salto n e
θn = 2vn
g(13.61)
e como vn =√
2ghn =√
2gh0en, obtem-se
θn = 2
√2h0
gen. (13.62)
A duracao total dos ressaltos determina-se somando o total:

13.1 Nocao de impulso. Colisoes 231
τ = 2√
2h0g ∑
n=∞n=1 en = 2
√2h0g e(1+ e+ e2 + ...+ en + ...)
τ = 2√
2h0g
e1−e .
(13.63)
Esta analise do problema mosta-nos que a duracao de cada ressalto diminui a medidaque n aumenta fazendo que no final a duracao total dos ressaltos tenha um valorfinito igual a τ .
13.1.3 Colisoes elasticas a 2-dim
Assumiremos que a partıcula alvo esta inicialmente em repouso,−→v 2 = 0. A partıculaincidente e a partıcula difundida definem um plano comum e o problema e bi-dimensional.
As partıculas podem colidir devido a serem atraıdas uma para a outra por acaode forcas interactivas.
A Fig. 13.4 representa o esquema da colisao elastica entre duas partıculas.
Fig. 13.4 Esquema da colisao elastica a 2-dim entre duas partıculas.
QuadroNegro 2

232 13 Colisoes. Continuacao
Exemplo 11: Colisao elastica a 2-dim.Considere a col. elastica entre duas massas:
mA = 5kg vA1 = 4m/smB = 3kg vB1 = 0
Assuma que apos a colisao, vA2 = 2 m/s. Determine VB2, θ e φ .Como a colisao e elastica Ki = K f :
12 (5kg)(4m/s)2 = 1
2 (5kg)(2m/s)2 + 12 (3kg)v2
B2∴ vB2 = 4.47m/s
(13.64)
A conservacao das componentes em Ox e Oy do momento da:
(5kg)(4m/s) = (5kg)(2m/s)cosθ +(3kg)(4.47m/s)cosφ
0 = (5kg)(2m/s)sinθ − (3kg)(4.47m/s)sinφ(13.65)
Resolve-se as 2 equacoes anteriores para cosφ e sinφ , elevam-se ao quadrado ambasas expressoes (porque sin2
φ + cos2 φ = 1) e obtem-se θ = 36.9o e φ = 26.6o.Exemplo 12: Pendulo balıstico.O pendulo balıstico e um metodo usado com frequencia para determinacao da
rapidez de um projectil.Tem-se:
• Bala: massa m e rapidez v1 (inicialmente)• Bloco: massa M m e rapidez inicial nula.
Depois da colisao, a massa (m+M) move-se conjuntamente ate a altura h.Estuda-se a colisao em 2 fases:
• i) a bala colide com o bloco e fica aı bloqueada;• ii) o conjunto bloco + bala move-se ate a uma altura maxima h.
Assume-se que durante a colisao as seguintes condicoes sao observadas:
• a duracao da colisao e curta;• o bloco nao se move durante a colisao;• durante a colisao nao se exerce alguma forca externa e a colisao e perfeitamente
inelastica e o momento e conservado;• a velocidade apos a colisao e dada por mv1 = (m+M)v f
Apos a colisao:
• o conjunto m+M tem energia cinetica;• a energia mecanica total e conservada;• K a altura h e transformada em energia potencial do bloco e da bala a altura h.
12 (m+M)v2
f = (m+M)gh∴ v f =
√2gh
⇒ v1 =(m+M)
m√
2gh(13.66)

13.1 Nocao de impulso. Colisoes 233
Quanto aos valores da energia verifica-se o seguinte:
Fig. 13.5 Pendulo balıstico.
Ki =12 mv2
1 =12 m (m+M)2
m2 2ghK f =
12 (m+M)v2
f =12 (m+M)2gh
K fKi
= mm+M 1
(13.67)
A maior parte da energia cinetica e perdida. Newton compreendeu que a energiacinetica nao se convserva neste problema, pois que a energia tem muitas formas epode ser convertida de uma forma de energia para outras formas que existem po-tencialmente, tais como calor, luz, som, electromagnetica,... Newton compreendeuque se usarmos a conservacao do momento linear obteremos a resposta certa doproblema, pois que o momento linear nao e convertıvel noutra forma.
Podemos igualmente fazer uma estimativa da duracao da colisao. Assumimosque a bala desacelera uniformemente ao longo de uma distancia 0.10 m, tendo umavelocidade inicial v1 = 300 m/s.
v2f − v2
o = 2as
a =− v2o
2s =−3002
2×0.10
(13.68)
Mas comov f = vo +at (13.69)
deduz-se quet ∼−vo
a= 6.7×10−4s, (13.70)
o que e bem inferior em varias ordens de grandeza ao perıodo do pendulo T =
2π
√Lg = 2π
√1.149.81 = 2.14 s, t T .
13.1.4 Colisoes inelasticas
COLISOES INELASTICAS: As colisoes que nao conservam a energia cinetica sao di-tas colisoes inelasticas. Parte da energia cinetica e absorvida pelos corpos e conver-tida noutras formas de energia (termica, sonora,...). A colisao inelastica acompanha-se sempre de uma diminuicao da energia cinetica do movimento macroscopico.
COLISAO TOTALMENTE INELASTICA: No caso em que a energia cinetica ab-sorvida atinge o valor maximo permitido pela conservacao do momento, a co-lisao e chamada totalmente inelastica. Os dois corpos apos a colisao unem-secomportando-se como um so corpo solido.

234 13 Colisoes. Continuacao
Assume-se que a energia interna e nula, Kint = 0, so restando a energia cineticado CM.
Na realidade grande parte das colisoes sao inelasticas ate certo ponto. A resolucaodos problemas que envolvem colisoes inelasticas sao muito dificeis porque e necessariosaber qual a quantidade de energia que foi perdida.
Os problemas mais simples sao aqueles que envolvem colisoes totalmente inelasticas.A consideracao da conservacao do momento e suficiente.
Exemplo 13: Colisao totalmente inelastica a 2-dim.Sabemos que o momento linear e sempre conservado na ausencia de forcas ex-
ternas,−→P i =
−→P f .
Temos assimm1v1 = (m1 +m2)vcosθ (a)m2v2 = (m1 +m2)vsinθ (b) (13.71)
Dividindo a Eq. 13.71-(b) pela Eq. 13.71-(b), obtemos
tanθ =m2v2
m1v1(13.72)
Da Eq. 13.71-(b) resultav =
m2
m1 +m2
v2
sinθ. (13.73)
Sejam:m1 = 70kg, v1 = 2m/sm2 = 50kg v2 = 3m/s
donde se obtem
tanθ =50×370×2
⇒ θ = 47o⇒ v =50
50+703
sin47o = 1.71m/s. (13.74)
Ki =12 m1v2
1 +12 m2v2
2 =12 70×22 + 1
2 50×32 = 365JK f =
12 (m1 +m2)v2 = 1
2 (50+70)1.712 = 175.5J.(13.75)
Como vimos, perde-se energia cinetica numa colisao totalmente inelastica.Exemplo 14: Um protao de massa mp animado com a velocidade−→v 0 colide com
um atomo de helio, de massa 4mp, que esta inicialmente em repouso. A direccao emque o protao deixa o ponto de impacto faz um angulo de 45o com a direccao inicial.Veja a Fig. 13.6.
a) Supondo que a colisao e perfeitamente elastica, quais sao as velocidades finaisde cada uma das partıculas? Em que direccao move-se o atomo de helio? Faca ocalculo no referencial do laboratorio.
Fig. 13.6 Choque de um protao com um atomo de helio no referencial do laboratorio.
A colisao e elastica, logo verificam-se as seguintes leis de conservacao:

13.1 Nocao de impulso. Colisoes 235
1. conservacao do momento linear;2. conservacao da energia cinetica.
1) Conservacao do momento linear:
QuadroNegro 3
2) Conservacao da energia cinetica:Temos
12
mpv20 =
12
mpv2 +12(4mp)V 2 (13.76)

236 13 Colisoes. Continuacao
ou sejav2
0 = v2 +4V 2 (13.77)
Na alınea anterior obtivemos as componentes da velocidade do atomo de helio aposa colisao. Podemos ver entao que temos
V 2 =V 2x +V 2
y =
(v0
4−√
28
v
)2
+
(√2
8v
)2
(13.78)
O desenvolvimento do calculo leva-nos sucessivamente num calculo algebricomonotono a
V 2 =v2
016 +
264 v2− 2
√2
32 v0v+ 264 v2
=v2
016 +
v2
16 −√
216 v0v.
(13.79)
Portanto, conclui-se que
v20 = v2 +
v20
4+
v2
4− v0v
√2
4. (13.80)
Daqui obtem-se a equacao quadratica:
5v2−√
2v0v−3v20 = 0, (13.81)
cujas solucoes sao:v = 0.9288v0
v =−0.646v0.(13.82)
A ultima solucao e descartada, pois que o protao nao recua (como e suposto noenunciado do problema).
Podem-se obter agora as componentes da velocidade do atomo de helio apos acolisao:
Vx =v04 −
√2
8 v = 0.0858v0
Vy =√
28 v = 0.164v0.
(13.83)
O angulo θ pode agora ser calculado:
tanθ =Vy
Vx= 1.911⇒ θ = 62o,38. (13.84)
assim como o modulo da velocidade
V =√
V 2x +V 2
y = 0.185v0. (13.85)
b) Calcule o angulo de difusao do protao no referencial do centro de massa.Designemos por
• θ - angulo de difusao no referencial do laboratorio: LAB• Θ - angulo de difusao no referencial do centro de massa: CM

13.1 Nocao de impulso. Colisoes 237
Usemos a Eq. ja introduzida em Seccao anterior:
tanφ =sinΘ
γ + cosΘ,
onde γ ≡m1/m2.QuadroNegro 4
c) Sabendo que a colisao e inelastica e que tem um Q igual a 1/4 da energiainicial do protao, determine as velocidades finais de cada uma das partıculas e adireccao em que se move o atomo de helio. Calcule o angulo de difusao do protaono referencial do CM.
Sabe-se inicialmente que Q = 14 Kpi. Escrevemos em seguida a equacao da con-
servacao do momento linear:
mp−→v 0 = mp
−→v +4mp−→V . (13.86)
Projectando em Ox e Oy, obtem-se:

238 13 Colisoes. Continuacao
v0 = v√
22 +4Vx,
0 = v√
22 −4Vy.
(13.87)
donde se obtemVx =
v04 −
√2
8 vVy =
√2
8 v(13.88)
A equacao do balanco energetico e:
QuadroNegro 5
Da Eq. da conservacao da energia tinhamos obtido
V =V 2x +V 2
y =v2
016
+v2
16−√
216
v0v. (13.89)
As Eqs. obtidas anteriormente levam-nos a sucessao do seguinte calculo algebrico:
34 v2
0 = v2 +4V 2
34 v2
0 = v2 +v2
04 + v2
4 −√
24 v0v
12 v2
0 =54 v−
√2
4 v0vv2
0 =52 v2−
√2
2 v0v∴ 5v2−
√2v0v−2v2
0 = 0
(13.90)
Esta ultima Eq. quadratica resolve-se facilmente, obtendo-se duas solucoes:
v = 0.789v0, v =−0.507v0. (13.91)

13.1 Nocao de impulso. Colisoes 239
A segunda solucao negativa nao nos interessa porque o protao nao recua, tal comoo mostra a Fig. 13.6. Resta-nos entao v = 0.789v0 e pode-se agora obter as compo-nentes em Ox e Oy da velocidade do atomo de helio:
Vx =v04 −
√2
8 v = 0.1105v0,
Vy =√
28 v = 0.139v0.
O angulo φ determina-se facilmente:
tanφ =Vy
Vx= 1.258⇒ θ = 510,52.
A relacao entre φ e Θ ja vimos que e dada pela expressao:
tanφ =sinΘ
γ + cosΘ
Quando a colisao e inelastica, a equacao precedente permanece valida, porem deve-se substituir o γ = m1/m2 pelo novo γ:
γ =m1
m2
[1− Q
K1i
(1+
m1
m2
)]−1/2
. (13.92)
Neste caso γ = 0.3015, sabendo que o protao faz um angulo de difusao de 450 coma direccao incidente, tem-se
1 = sinΘ
0.3015+cosΘ
0.3015+ cosΘ = sinΘ
0.3015 = sinΘ − cosΘ
0.0909 = sin2Θ + cos2 Θ −2sinΘ .cosΘ = 1− sin2Θ
sin2Θ = 0.90912Θ = 65o,38Θ = 32o,69
(13.93)
13.1.5 Colisoes. Sumario
13.1.5.1 Condicoes
Um evento e considerado uma colisao se ∆ t ∆T :
• pode-se distinguir o tempo antes, durante e depois da colisao;• ∆ t tempo de colisao;• ∆T tempo de observacao.
Um evento e uma colisao se | Iext || Icoll |: o impulso das forcas externas pode serdesprezado e o momento e conservado.

240 13 Colisoes. Continuacao
13.1.5.2 Classificacao das colisoes
• Elastica - K e conservado;• Inelastico - K nao e conservado;• Completamente inelastica - as partıculas colam-se uma a outra apos a colisao.
13.1.5.3 Notacao
• m1 e m2 - massas das partıculas;• v1i, v2i - velocidades iniciais das partıculas 1,2 (antes da colisao)• v1 f , v2 f - velocidades finais das partıculas 1,2 (apos a colisao)
13.1.5.4 Equacoes
Conservacao do momento - valido para todas as colisoes:
m1−→v 1i +m2
−→v 2i = m1−→v 1 f +m2
−→v 2 f . (13.94)
Conservacao da energia cinetica - valido somente para as colisoes elasticas:
12
m1v21i +
12
m2v22i =
12
m1v21 f +
12
m2v22 f (13.95)
EXPERIENCIA: Determine experimentalmente o centro de gravidade de umcartao plano.
Pode faze-lo por meio do seguinte procedimento: Faca dois orifıcios A e B juntoas extremidades e suspenda o cartao com uma agulha de tricot do orifıcio A. Pendurena agulha um fio de prumo que tenha sido esfregado com cal. Dedilhe o fio para queeste deixe a marca sobre o cartao. Repita o processo usando outro orifıcio B. Ainterseccao dos tracos da-se no centro de gravidade do cartao (Fig. 13.7).
Fig. 13.7 Metodo para determinacao do centro de gravidade de um objecto.
Este foi o metodo usado por Arquimedes na demonstracao do princıpio da ala-vanca. O Princıpio do Centro da Gravidade e na verdade o Princıpio da Alavanca nasua forma mais geral.
13.1.6 Exercıcio suplementar de revisao
Exercıcio 1: Desprezando a resistencia do atrito e do ar, determinar o temponecessario para que um trem atravesse um tunel cavado atraves da Terra, por ex-

13.1 Nocao de impulso. Colisoes 241
emplo a corda AB tal como e mostrada na Fig. 13.8. O trem entra no ponto A e saino ponto B. Suponha que o raio da Terra e RT = 6370 km.
Vamos comecar por supor que o trem parte de A onde x = a (atendendo a nossacolocacao da origem das coordenadas em O) com velocidade inicial nula, vo = 0. Naposicao arbitraria em que estao trem, ele e actuado pelas forcas
−→F e−→N . Projectando
no eixo Ox, tem-se:
∑Fextx =−GMT m
r2 cosα =−GMT mr3 r cosα = m
d2xdt2 . (13.96)
Mas depreende-se da Fig. 13.8 que x = r cosα e na proximidade da superfıcie ter-restre podemos admitir, em primeira aproximacao, que r ≈ R. Podemos obter assimuma equacao com resolucao analıtica simples:
∑Fextx =−mg
R x = m d2xdt2
∴ vxdvxdt =−k2x.
(13.97)
Nesta ultima equacao pusemos k2 = g/R, onde g=GMT/R2 representa a aceleracaoda gravidade.
Fig. 13.8 Trem atravessando tunel cavado na Terra.
E claro que reconhecemos de imediato a equacao diferencial de segunda ordemdo movimento harmonico simples, cuja solucao e do tipo x = acoskt. Mas podemosfazer de conta que nao o sabemos e iremos procurar a solucao pelo processo maiselaborado. Temos assim ∫
vxdvx =−k2 ∫ xdx
∴ v2x2 =−k2 x2
2 +C1(13.98)
Mas sabemos que as condicoes iniciais sao: x(t = 0) = ae vx(t = 0) = 0. Obtem-seassim C1 =
12 k2a2.
Substituindo C1 na equacao precedente tem-se
vx =±k√
a2− x2 (13.99)
Como supomos que na posicao onde consideramos estar o trem a velocidade vai dem para O, escolhemos o sinal negativo, vx < 0. Portanto temos
dxdt
=−k√
a2− x2 (13.100)
Separando as variaveis (pelo metodo da separacao das variaveis), temos tambem
kdt =− dx√a2− x2
. (13.101)

242 13 Colisoes. Continuacao
Integrando esta equacao vem
kt = arccos xa +C2
∴ x(t) = acoskt (13.102)
pois que de x(t = 0) = a obtemos sem dificuldade C2 = 0. O trem no tunel efec-tua um movimento harmonico com frequencia angular ω =
√g/R. O tempo que o
trem leva a percorrer o tunel de A para B e t1 = π
√Rg ≈ 42 minutos. Qual sera a
velocidade maxima que o trm pode atingir em O?
vmax = ka = a
√Rg= 1422km/h (13.103)
Apesar da complexidade tecnica do problema, existem projectos que visam utilizareste processo como meio de transporte.

Chapter 14Cinematica do Corpo Rıgido
“People say to me, ”Are you looking for the ultimate laws of physics?” No, I’m not... If itturns out there is a simple ultimate law which explains everything, so be it that would bevery nice to discover. If it turns out it’s like an onion with millions of layers... then that’s theway it is”.
- Richard Feynman.
14.1 Cinematica do corpo rıgido
Na vida real os objectos nao sao pontuais mas apresentam uma distribuicao demassa, alem de terem dimensoes e forma.
Como ja vimos, no movimento dos objectos reais podemos distinguir:
• o movimento de translacao do CM;• o movimento rotacional em torno de um eixo, que frequentemente passa pelo
CM, ou algum outro eixo fixo.
Neste capıtulo discutiremos o movimento do corpo rıgido.CORPO RIGIDO: Entende-se por corpo rıgido um objecto no qual as coordenadas
relativas que ligam todas as partıculas constituintes permanecem constantes.Trata-se de uma idealizacao, como e evidente, mas que permite aceder aos as-
pectos fenomenologicos fundamentais do problema. Iremos tratar em geral objectosfamiliares tais como: a roda volteando em torno do eixo principal; o eixo cilindrico;a mo; o pendulo.
14.1.1 Rotacao em torno de um eixo fixo
Comecaremos este estudo com o movimento de um corpo rıgido em torno de umeixo fixo num referencial de inercia.
243

244 14 Cinematica do Corpo Rıgido
Consideremos o movimento em torno do eixo Oz. O ponto de referencia P quese encontra fora do eixo (tal como o mostra a Fig. 14.1) representa o movimentorotacional do corpo e a sua posicao angular.
Fig. 14.1 Rotacao de um corpo rıgido em torno de um eixo fixo (eixo Oz).
Dado um determinado ponto P sobre o solido, a sua velocidade angular e medidopelo angulo φ varrido na unidade de tempo pelo vector posicao −→r e o eixo Ox. Avelocidade angular e o numero de radianos descritos por segundo e representa-sepela letra Grega ω (le-se omega).
A partıcula move-se num cırculo desde o eixo positivo Ox (φ = 0) ate ao pontoP, ao longo do arco de comprimento
s = Rφ . (14.1)
Recordamos aqui que faz-se a conversao de angulos de graus para radianos 1 atravesda regra
φ(rad) =π
180φ(graus). (14.2)
CONVENCAO: Por convencao, φ e positivo quando roda no sentido anti-horarioe φ = 0 sobre o eixo positivo do Ox, e φ = 2π quando se da uma volta completa ateao eixo Ox de novo. φ nao e um vector (a operacao de rotacao nao e comutativa),mas d
−→φ = dφ
−→k que representa uma rotacao infinitesimal, e um vector.
O movimento rotacional de um corpo e descrito pela taxa de variacao de φ . Emgeral, a posicao e uma funcao do tempo:
φ = φ(t). (14.3)
Suponha que a partıcula move-se de P para Q. A linha de referencia OP faz umangulo φ1 no instante de tempo t1 e um angulo φ2 no instante de tempo t2. Define-sea velocidade media angular do corpo, ω , no intervalo de tempo ∆ t = t2− t1, peloracio do deslocamento angular ∆φ = φ2−φ1 por ∆ t:
ω =φ2−φ1
t2− t1=
∆φ
∆ t, (14.4)
que se expressa em unidades de rad/s, ou s−1 (vd. Fig. 14.3).
Fig. 14.2 Ponto de referencia P descrevendo um arco de circunferencia s = Rφ .
1 Um radiano e igual a 57.296o, e e o angulo subtendido no centro de um arco de circunferenciacujo comprimento e igual ao raio. A circunferencia de um cırculo de raio r e 2πr. A rapidez derotacao e medido com frequencia em revolucoes por minuto.

14.1 Cinematica do corpo rıgido 245
Denotemos por−→k o vector unitario orientado ao longo do eixo de rotacao (eixo
Oz). −→ω orienta-se ao longo do eixo de rotacao, aplicando-se a convencao da regra-da-mao-direita.
Tal como fizemos para a velocidade angular, podemos aqui igualmente definira velocidade angular instantanea, definida como o limite para que tende o racio∆φ/∆ t quando ∆ t→ 0:
−→ω = lim
∆ t→0
∆φ
∆ t=
dφ
dt−→k (rad.s−1). (14.5)
Fig. 14.3 Uma partıcula num objecto rıgido move-se de P para Q ao longo de um arco de cırculo.No intervalo de tempo ∆ t = t2− t1, o vector posicao varre um angulo ∆φ = φ2−φ1.
Se a velocidade angular ω for constante, poem-se:
ω = ωo. (14.6)
Recordamos que a taxa de rotacao e dada em numero de rotacoes 2 por unidade detempo.
O tempo de uma revolucao, ou perıodo, define-se como
T =2π
ωo(s), (14.7)
e a frequencia de revolucao define-se como
ν =1T
=ωo
2π(Hz). (14.8)
Quando a velocidade angular do corpo varia com o tempo, diz-se que ele possui umaaceleracao angular. Se as velocidades angulares do corpo sao ω1 e ω2 em instantessucessivos t1 e t2, a aceleracao angular media e:
α =ω2−ω1
t2− t1=
∆ω
∆ t. (14.9)
A aceleracao instantanea define-se como o limite do racio quando ∆ t→ 0:
−→α = lim
∆ t→0
∆ω
∆ t=
d−→ωdt
(s−2). (14.10)
Visto que ω = dφ/dt, e valida a seguinte relacao:
−→α =
d2−→φdt2 . (14.11)
2 Ou revolucoes, ou voltas, ou ciclos

246 14 Cinematica do Corpo Rıgido
Na rotacao em torno de um eixo fixo cada partıcula do corpo rıgido possui a mesmavelocidade angular e a mesma aceleracao angular.
A direcao de −→α e ao longo do mesmo eixo que −→ω . Se o eixo de rotacao variaentao −→α nao coincide com −→ω .
REGRA DA MAO DIREITA: A regra da mao direita permite conhecer a orientacaode ambos os vectores. Quando os dedos da mao direita enrolam-se ao longo dadirecao de rotacao, entao −→ω aponta ao longo do polegar (Vd. Fig. 14.4-(a)).
A direcao de −→α esta relacionada com d−→ω /dt:
• d−→ωdt > 0: −→α tem o mesmo sentido que −→ω .
• d−→ωdt < 0: −→α tem o sentido oposto a −→ω .
Fig. 14.4 Regra da mao direita para o sentido de α e ω .
14.1.2 Movimento rotacional com aceleracao angular constante
Vamos assumir que o movimento faz-se em torno de um eixo. Iremos ignorar poragora a notacao vectorial na medida em que nos basta os sinais das grandezas fısicaspara determinarmos a direccao. As conclusoes que iremos alcancar sao validasmesmo se o eixo se encontra em movimento de translacao. Da aceleracao angular:
dω
dt= α, (14.12)
intgrando, obtem-se: ∫dω =
∫αdt,
ω = αt +C.(14.13)
A constante de integracao C e determinada a partir das condicoes iniciais, ω =ωo(t = 0)⇒C = ωo. Ou seja:
ω = ωo +αt, (14.14)
ou ainda:
QuadroNegro 1

14.1 Cinematica do corpo rıgido 247
Table 14.1 Comparacao entre o movimento com aceleracao linear constante e com aceleracaoangular constante.
movimento com aceleracao linear constante movimento com aceleracao angular constantea = constante α = constante
v = vo +at ω = ωo +αtx = xo + vot + 1
2 at2 φ = φo +ωot + 12 αt2
v2 = v2o +2a(x− xo) ω2 = ω2
o +2α(φ −φo)
14.1.3 Relacao entre a velocidade e aceleracao angular e linear
Quando um corpo rıgido roda em torno de um eixo fixo, cada partıcula do corpomove-se num cırculo em torno do eixo de rotacao.
Considere um ponto P em movimento circular. O vector velocidade linear e tan-gente ao cırculo. O modulo e ds/dt, onde s e a distancia percorrida ao longo dopercurso circular:
s = rφ
v = dsdt = r dφ
dtv = rω
(14.15)
A rapidez da partıcula e directamente proporcional a distancia do eixo de rotacao;quanto mais distante do eixo maior e a sua velocidade.
Podemos relacionar a aceleracao do ponto P com a aceleracao angular do corporıgido em torno de um eixo fixo. Toma-se a derivada de v em ordem ao tempo:
at = a‖ =dvdt
= rdω
dt= rα. (14.16)
Esta e a componente tangencial (paralela) da aceleracao linear de um ponto adistancia r do eixo de rotacao. Mede a taxa de variacao da rapidez da partıcula.
Atendendo a que a partıcula move-se num cırculo, ja vimos que ela deve teruma componente centrıpeta (ou radial) da aceleracao que resulta da sua mudanca dedireccao:
ar = a⊥ =v2
r= rω
2. (14.17)
A aceleracao linear total da partıcula e −→a :
−→a =−→a t +−→a r
a =√
a2t +a2
r = r√
α2 +ω4(m/s2).(14.18)

248 14 Cinematica do Corpo Rıgido
14.1.4 Energia cinetica rotacional
Consideremos um corpo rıgido composto por uma coleccao de N partıculas. A en-ergia cinetica do conjunto e a soma das energias cineticas individuais de cada umadas partıculas:
K =N
∑i=1
12
miv2i . (14.19)
Cada i-esima partıcula descreve um movimento circular em torno do eixo de rotacaoOz tendo como velocidade linear vi = riω . No total, temos:
K = ∑Ni=1
12 mir2
i ω2,K = 1
2 Iω2.(14.20)
onde I e dado por:I = ∑
imir2
i . (14.21)
I define o momento de inercia do conjunto completo de partıculas em relacao a umdado eixo de rotacao (ou eixo de simetria). No sistema SI a unidade fısica de I e okg.m2.
A palavra momento e usada no sentido de “importancia” ou “consequencia”.Chamamos a atencao para o significado da palavra “momento” para que ela rep-resente uma ideia e nao tao so uma mera quantidade fısica. Assim, quando se diz“o momento da forca em torno de um eixo”, quer-se dizer qual e a importancia daforca no que diz respeito a capacidade dessa forca em por o corpo em rotacao. Omomento de inercia de um corpo em relacao a um eixo significa a importancia dainercia desse corpo quando se procura roda-lo em torno desse eixo.
Chamamos agora a atencao para os seguintes dois conceitos diferentes, poremanalogos:
ω, I resistencia-ao-movimento-rotacionalv,m resistencia-ao-movimento-linear (14.22)
Exemplo 1: Um gira-discos roda a velocidade de 33 rev/mn e leva 20 s paraparar. a) Assumindo que a velocidade angular e uniforme, determine o seu valor?
ωo = (33rev/min)(2πrad/rev)(1min/60s) = 3.46rad/sω = ωoαt
ω(t = 20s) = 0∴ α = ω−ωo
t = 0−3.4620 =−0.173rad/s2.
(14.23)
O sinal negativo significa que o disco esta em desaceleracao.Repare no procedimento da conversao em cadeia de modo a expressar a grandeza
fısica na unidade que nos interessa. Na conversao em cadeia multiplica-se a medidaoriginal por um factor de conversao. Por exemplo, 1 min/60 s=1. Assim, se mul-tiplicarmos a grandeza pela unidade nao modificamos nao modificamos o valor dagrandeza.

14.1 Cinematica do corpo rıgido 249
b) Quantas rotacoes sao dadas ate o disco ficar em repouso?
∆φ = φ −φo = ωot + 12 αt2
= 3.46(20)− 12 (0.173)202
= 34.6rad= 34.6
2π= 5.51rev.
(14.24)
c) Determine a aceleracao de um ponto a distancia de r = 14 cm do centro noinstante t = 0.
at = rα = 14cm(0.173rad/s2) = 2.42cm/s2
ac = rω2o = 14cm(3.46rad/s)2 = 168cm/s2
a =√
2.422 +1682 = 168.0cm/s2.
(14.25)
Velocidade desse ponto no instante t = 0 e:
v = rωo = 14cm×3.46rad/s= 48.4cm/s. (14.26)
Exemplo 2: Calcule a energia cinetica duma roda cilındrica de massa M que rolasem deslizar. Sabe-se que o momento de inercia do cilindro em relacao ao eixo quepassa pelo CM e Iz = MR2/2.
QuadroNegro 2
Exemplo 3: Conjunto de quatro partıculas em rotacao.Considere 4 partıculas ligadas a uma estrutura muito leve e assente no plano
OXY, tal como esta ilustrado na Fig. 14.5.
Fig. 14.5 Quatro partıculas em rotacao.

250 14 Cinematica do Corpo Rıgido
a) Determine o momento de inercia em torno do eixo Oy e a sua energia cinetica,supondo que a velocidade angular do conjunto e ω .
b) Determine o momento de inercia e a energia cinetica de rotacao em torno doeixo Oz, perpendicular ao plano XY.
QuadroNegro 3

Chapter 15Momentos de Inercia
“No intelligent idea can gain general acceptance unless some stupidity is mixed in with it.”
- Fernando Pessoa
15.0.5 Momento de inercia dos corpos rıgidos
Calcula-se o momento de inercia I de um corpo rıgido em rotacao em torno deum eixo dividindo-o em pequenos elementos de volume de massa elementar ∆m.Usamos a expressao I = ∑r2∆m e toma-se o limite da soma quando ∆m→ 0. O rrepresenta a distancia perpendicular ao eixo de rotacao (Fig. 15.1):
I = lim∆m→0
∑r2∆m =
∫V
r2dm. (15.1)
Temos que exprimir ∆m em termos das suas componentes de modo a efectuar ocalculo e para tal introduz-se a densidade volumica local de massa ρ:
ρ = lim∆V→0∆m∆V = dm
dV ,∴ dm = ρdV,
(15.2)
donde podemos obter finalmente o momento de inercia:
I =∫
ρr2dV. (15.3)
Para corpos homogeneos o integral anterior reduz-se a
I =MV
∫r2dV. (15.4)
251

252 15 Momentos de Inercia
AXIOMA. - O momento de inercia de um corpo relativamente ao eixo de rotacaoe a soma dos momentos de inercia de qualquer parte constituinte, e de modo semel-hante, o momento de inercia relativamente a qualquer eixo de qualquer superfıcieou volume e igual a soma dos momentos de inercia de qualquer parte constituintena qual podemos imaginar a superfıcie ou o volume divididos.
Fig. 15.1 Corpo solido em rotacao em torno do eixo OZ. r representa a distancia em relacao aoeixo OZ (na perpendicular) da massa ∆m.
Como ilustracao do que se disse, podemos referir que o momento de inercia dopiao mostrado na Fig. 15.2 relativamente ao seu eixo de revolucao e igual ao mo-mento de inercia da cupula hemisferica ABC mais a parte inferior do corpo ABDE,mais a ponta conica em aco DE.
Fig. 15.2 Piao.
Na Fig. 15.3 apresentam-se os momentos de inercia dos corpos rıgidos de usomais frequentes.
Fig. 15.3 Momentos de inercia.
Exemplo 1: Cilindro oco de densidade uniforme.Em coordenadas cilındricas o elemento diferencial de volume (Vd. Fig. 15.4) e
dado por:dV = 2πlrdr
dm = ρdV = 2πρlrdr (15.5)
Fig. 15.4 Momento de inercia de um cilindro oco. A massa elementar consiste num cilindro deraio r e espessura dr.
QuadroNegro 1

15 Momentos de Inercia 253
Portanto, concluımos que o momento de inercia do cilindro oco e:
I =M2(R2
2 +R21). (15.6)
A Eq. 15.3 permite obter de imediato os momentos de inercia dos seguintes cor-pos solidos:
• Disco uniforme, R1 = 0⇒ I = 12 MR2;
• Anel uniforme, R1 ≈ R2 = R⇒ I = MR2.
Repare que em qualquer dos casos, o momento de inercia do cilindro nao dependedo seu comprimento l. Isto e, a distribuicao de materia ao longo do eixo nao e rele-vante. Porem, o momento de inercia depende fortemente da distribuicao da materiaradialmente, como mostra a Fig. 15.5.
Exemplo 2: Barra (ou haste) uniforme.Toma-se o eixo de rotacao que passa pelo seu centro e e perpendicular ao seu
comprimento.O comprimento da barra e L e, portanto, neste caso a distancia radial r vai de 0 a
L/2 de cada lado. Se a barra for uniforme, podemos escrever
dm =ML
dr = λdr. (15.7)
Deve-se em seguida integrar∫
r2dm desde o centro ate uma das extremidades, mul-tiplicando depois por 2 (pois ha duas extremidades):
I =∫
r2dm = 2ML
∫ L/2
0r2dr =
ML2
12. (15.8)
Referimos aqui, sem proceder ao seu calculo, que o momento de inercia de umaesfera, I = 2
5 MR2. Todos os exemplos referidos mostram que e possıvel (e tambemusual) representar o momento de inercia como o produto da massa do corpo M peloquadrado de um comprimento a que se chama raio de giracao em torno do eixo derotacao, k:
I = Mk2. (15.9)
Se qualquer outro corpo tiver a massa total M localizada a distancia k do eixo, omomento de inercia sera igual a de qualquer um dos corpos solidos acima referidos.O raio de giracao e definido pela relacao:
Mk2 = ∑i(mir2i )
k2 =∑i(mir2
i )M
(15.10)
Fig. 15.5 Diferentes distribuicoes de uma mesma massa M relativamente ao eixo Oz. a) barra; b)cilindro; c) disco. Os momentos de inercia verificam a desigualdade: Iz(R1)< Iz(R2)< Iz(R3).

254 15 Momentos de Inercia
Denotamos por Iz o momento de inercia em relacao ao eixo de rotacao Oz, porexemplo no caso c) do disco da Fig. 15.5, mas e claro que qualquer outro eixoperpendicular a Oz e que passe pelo centro de massa e tambem um eixo de simetria.Assim, e possıvel definir dois outros momentos de inercia, Ix e Iy relativos a doisnovos eixos perpendiculares a Oz e perpendiculares entre si. Chamam-se principaismomentos de inercia do corpo as tres quantidades (Ix, Iy, Iz). No caso particular dodisco, teremos, como e evidente, Ix = Iy 6= Iz.
Tambem se verificam as seguintes proposicoes, aqui apresentadas sem demonstracao.PROPOSICAO: Em qualquer corpo rıgido, a soma dos momentos de inercia rel-
ativo a qualquer dos tres eixos rectangulares tracados a partir de um dado pontofixo no corpo e constante, para qualquer posicao desses eixos:
Ix + Iy + Iz = const. (15.11)
PROPOSICAO: Em qualquer plano que passa por um dado ponto fixo do corpo,os eixos de maior e menor momento de inercia, para esse plano, fazem um angulorecto um com o outro.
Para compreedermos, fixemos um dos eixos, o eixo Oz, por exemplo, sendo orespectivo momento Iz. Portanto, Ix + Iy =Const. Logo, quando Iz e um maximo, Iye um mınimo para o plano xy, e vice-versa.
PROPOSICAO: Se o momento de inercia relativo a qualquer eixo (Ox) que passepor um ponto fixo do corpo tem o seu valor maximo, entao o momento de inercia rel-ativo a outro eixo (Oz), fazendo um angulo recto com Ox, tera o seu valor mınimo; eo momento de inercia relativo ao eixo perpendicular restante (Oy) tera um maximono plano yz, e um mınimo no plano xy.
Seja Ox um eixo de momento de inercia maximo para o ponto O. Entao o eixocom o momento de inercia mınimo deve estar no plano que passa por O e lhe eperpendicular. Em seguida, suponhamos que o eixo mınimo e Oz. O momento deinercia relativo ao eixo restante, Oy, deve ter um maximo para o plano yz. Para Ixfixo, Iy + Iz =Const., e portanto Iy e um maximo pois que Iz e mınimo.
DEFINIOES: Os eixos rectangulares correspondentes aos momentos de inerciamaximo, mınimo e intermediario sao chamados eixos principais do ponto do corpoa partir do qual foram tracados, e os momentos de inercia respectivos sao chamadosmomentos de inercia principais para esse ponto. Um plano que contenha doisdesses eixos principais e chamado de plano principal para esse ponto. Quando oponto coincide com o centro de massa, os eixos principais chamam-se principaiseixos do corpo e os momentos de inercia, momentos de inercia principais docorpo.
PROPOSICAO: O momento de inercia (IOP) relativo a qualquer eixo OP fazendoos angulos α , β e γ com os eixos principais que passam por qualquer ponto O, emrelacao aos quais os momentos de inercia principais sao A, B e C, e dado por:
IOP = Acos2α +Bcos2
β +C cos2γ. (15.12)
Os calculos dos momentos de inercia podem ser muito facilitados com o usode dois importantes teoremas que apresentamos em seguida. O teorema dos eixos

15 Momentos de Inercia 255
paralelos aplica-se a qualquer corpo solido. O teorema dos eixos perpendicularesaplica-se somente a corpos planos de espessura muito pequena.
15.0.6 Teorema dos eixos paralelos
O Teorema dos Eixos Paralelos encontra-se referido em outras obras como o Teo-rema de Huygens, ou o Teorema de Steiner.
O momento de inercia depende da posicao do eixo de rotacao. Supondo que jaconhecemos o momento de inercia em relacao a um eixo qualquer, vamos ver comose determina o momento de inercia em relacao a outro eixo paralelo ao primeiro.
Seja Ic o momento de inercia em relacao a um eixo que passa pelo CM. O mo-mento de inercia em relacao a um dado eixo z e igual a Ic mais o produto da massado corpo M pelo quadrado da distancia d entre os dois eixos:
Iz = Ic +Md2. (15.13)
Exemplo 3: BarraSabemos que o momento de inercia em relacao a um eixo que passa pelo meio
e, Ic = ML2/12. Qual e o momento de inercia em relacao a um eixo que passa pelaextremidade?
Fig. 15.6 Aplicacao do teorema dos eixos paralelos a barra uniforme.
d = L2
I = ML2
12 +M(L
2
)2
I = ML2
3 .
(15.14)
15.0.7 Teorema do eixo perpendicular
Este teorema estabelece uma relacao entre os momentos de inercia em relacao a treseixos (mutuamente perpendiculares entre si) de um corpo plano de espessura muitopequena e de forma arbitraria.
Consideremos uma placa muito fina que pode rodar em torno de qualquer dostres eixos (Ox,Oy,Oz). Suponhamos que a placa assenta sobre o plano xy. Seja umponto O arbitrariamente colocado sobre a placa e um eixo z perpendicular a ele. Omomento de inercia do corpo em relacao a z e Iz. Um elemento de massa dm situadoa distancia r do eixo contribui com r2dm, sendo no total

256 15 Momentos de Inercia
Iz =∫
r2dm. (15.15)
A distancia do eixo z ao ponto de referencia P e dada por:
r =√
x2 + y2 (15.16)
que assenta no plano xy. Podemos entao escrever
Iz =∫
x2dm+∫
y2dm. (15.17)
Fig. 15.7 Placa muito fina que pode rodar em torno de qualquer eixo Ox, Oy, Oz.
Como o corpo e plano, o primeiro termo do segundo membro representa o mo-mento de inercia em relacao ao eixo Ox, Ix e, na mesma logica, o segundo termo eIy. Concluımos assim que
Iz = Ix + Iy. (15.18)
Este resultado e conhecido como o teorema dos eixos perpendiculares.Exemplo 4: Disco plano uniforme. Seja um disco plano uniforme de massa M e
raio R. Calcule os momentos Ix, e Iy.O calculo de qualquer um deles seria complicado, mas a aplicacao deste teorema
torna-o extremamente simples. Sabemos de um calculo anterior que Iz = MR2/2.Por razoes de simetria, temos
Ix + Iy = 2Ix =MR2
2∴ Ix =
MR2
4 .(15.19)
Exemplo 5: Placa quadrada uniforme. Considere uma placa quadrada de ladoa. Determine Ix e Iy. Sabemos que Iz =
16 Ma2. Como por razoes de simetria temos
Ix = Iy, obtemos logo
Ix + Iy = 2Ix = Iz =16
Ma2. (15.20)
Exemplo 6: Placa rectangular. Um corpo tem a forma de um rectangulo de ladomenor a e lado maior b. Quais sao os valores dos momentos de inercia em relacaoaos dois eixos que passam pelo seu centro e sao perpendiculares ao seu plano? (vd.Fig. 15.8).
Fig. 15.8 Placa rectangular.
Comecemos por determinar Iz. Repare na Fig. 15.8. Um elemento de massa dm=σdS onde σ e a densidade superficial de massa, σ = M/(ab) e dS = dxdy e o

15 Momentos de Inercia 257
elemento diferencial de superfıcie.
Iz =∫
r2dm =∫
Sr2
σdxdy (15.21)
Mas a integracao na varavel x deve ir de 0 a a/2 e o mesmo para y que deve ir de 0a b/2. No final devemos ainda multiplicar por 4 para obter a superfıcie total:
Iz = 4 Mab (∫ a/2
0∫ b/2
0 x2dy+∫ b/2
0∫ a/2
0 y2dx= 4 M
ab (a3
3×8b2 +
b3
3×8a2 )
= M12 (a
2 +b2).
(15.22)
O calculo de Ix e mais facil. E semelhante ao calculo de uma barra fina.
Ix =∫ b/2−b/2 y2dm
=∫ b/2−b/2 y2λdy
= λ2 b3
3×8
= Mb2
12 ,
(15.23)
onde λ = M/b. Um calculo analogo permite-nos concluir que Iy = Ma2/12.Exemplo 7: Uma corda de massa desprezavel encontra-se enrolada em torno de
um solido cilındrico de massa M e raio R. Uma massa m e presa a corda e e largadada altura h acima do solo, tal como se encontra ilustrado na Fig. 15.9. Assumindoque o movimento nao e submetido a alguma forca de fricao, determine a rapidez damassa m e a velocidade angular do cilindro quando m atinge o solo.
Fig. 15.9 Com a rotacao do cilindro, a corda desenrola e a massa m cai no solo da altura h.
Repare que o conjunto mecanico nao possui inicialmente energia cinetica, mastem energia potencial U . No final, imediatamente antes de a massa m colidir com osolo, m e M possuem ambas energia cinetica.
E1 = K1 +U1 E2 = K2 +U2E1 = 0+mgh E2 =
12 mv2 + 1
2 Icω2 +0(15.24)
sendo v = ωR e I = MR2/2. Atendendo a conservacao da energia, E1 = E2, conclui-se que:
mgh = 12 mv2 + 1
2
( 12 MR2
)( vR
)2= 1
2
(m+ M
2
)v2
⇒ v =
√2gh
1+ M2m,
(15.25)
com ω = v/R.Exemplo 8: Uma das partes constituintes dum mecanismo comporta uma peca
(Fig. 15.10) que efectua um movimento de translacao de velocidade −→u e uma haste

258 15 Momentos de Inercia
AB de comprimento L e massa M, ligada a peca exterior por meio de um eixo A.Calcule a energia cinetica da haste quando ela forma um certo angulo α com avertical.
Fig. 15.10 Mecanismo comportando uma peca que efectua um movimento de translacao de ve-locidade u e uma haste AB de comprimento L e massa M, ligada a peca exterior por meio de umeixo A.
A energia cinetica e dada por
K =12
Mv2c +
12
Icω2. (15.26)
A velocidade do ponto C assinalado na Fig. 15.10 e por sua vez relacionada com avelocidade −→u da peca por meio da Transformacao de Galileu:
−→v c =−→u +−→v r, (15.27)
sendo vr = ωl/2. O momento de inercia da haste e, como ja vimos, Ic = Ml2/12.Portanto temos:
K = 12 M(u2 +ω
l2
4 +2ωu l2 cosα)+ 1
24 Ml2ω2
K = 12 Mu2 + Ml2ω2
8 + 124 Ml2ω2 + 1
2 Muωl cosα
K = 12 Mu2 + 1
6 Ml2ω2 + 12 Mlωucosα.
(15.28)
15.0.8 Momento angular de uma partıcula
Considere uma partıcula de massa m localizada a distancia −→r de uma origem O emovendo-se com velocidade−→v . O momento angular instantaneo
−→L da partıcula rel-
ativa a origem O e definido pelo produto externo do seu vector posicao instantaneopelo seu momento linear instantaneo −→p (Vd. Fig. 15.11):
−→L = [−→r ×−→p ], (15.29)
cujo modulo e dado por:| −→L |= rpsinφ . (15.30)
A sua unidade no sistema SI e kg.m/s2.
Fig. 15.11 O momento angular L de uma partıcula de massa m e momento p localizado a umadistancia r e um vector dado por L = [r× p].

15 Momentos de Inercia 259
O modulo e direccao de−→L dependem do sistema de coordenadas. A direccao
de−→L e perpendicular ao plano que contem −→r e −→p , como ilustra a Fig. 15.12. Em
particular,−→L = 0 se −→r for paralelo a −→p .
Fig. 15.12 Lz = r⊥p ou Lz = rp⊥.
Geometricamente:
• r⊥ - distancia na perpendicular entre a origem e o vector −→p ;• p⊥ - componente de −→p perpendicular a −→r .• −→L = [−→r ×−→p ].
Em particular, para o caso da Fig. 15.12 verifica-se:
Lz = r⊥p = rp⊥. (15.31)
Para o calculo do momento angular pode-se usar a notacao matricial:
−→L = [−→r ×−→p ] =
−→i −→j −→krx ry rzpx py pz
. (15.32)
Exemplo 9: Partıcula em movimento numa linha recta.Assuma que :
• −→F ext = 0, −→v = const.• A direccao de
−→L = const.
• O modulo de−→L = const.
Ja sabemos que−→L = rpsinφ
−→k .
Se −→r e −→p se encontram no plano xy,−→L aponta ao longo do versor
−→k (Vd.
Fig. 15.14).
Fig. 15.13 A distancia entre a origem e a linha do movimento e r sinθ .
Se o vector posicao da partıcula parecer mover-se em torno de um dado pontoO que podemos ter como origem, entao a partıcula tera certamente um momentoangular nao nulo. Se o vector posicao somente decresce ou aumenta em modulo,isso significa que a partıcula esta a mover-se ao longo de uma linha que passa pelaorigem (do vector posicao) e o momento angular e nulo.
Este exemplo mostra quanto importante e a escolha da origem das coordenadas.Deve-se sempre escolher uma origem antes de proceder ao calculo do momentoangular.
Exemplo 10: Partıcula em movimento circular uniforme.

260 15 Momentos de Inercia
Considere uma partıcula no extremo de uma corda. E na verdade uma situacaosemelhante ao da Terra e outros planetas em torno do Sol. Escolha-se uma origemno centro do cırculo, tal como se ve na Fig. 15.14.
Fig. 15.14 Partıcula em movimento uniforme circular. O vector L e perpendicular ao plano docırculo.
−→L = [−→r ×−→p ]
−→L = rp
−→k = mrv
−→k = (mr2)ω
−→k .
(15.33)
Como o movimento e uniforme,−→L permanece constante em modulo e direccao.
Neste exemplo ha forcas actuando sobre a partıcula:
ac =v2
rFc =
mv2
r
(15.34)
A forca centrıpeta actua na direcao do centro do cırculo que foi tomada comoorigem. E importante notar que se tivessemos escolhido qualquer outra origem,
−→L
nao teria sido constante.Exemplo 11: Momento angular do pendulo conico.Assuma que o pendulo descreve um movimento circular com velocidade angular
ω . Escolha a origem em A, como o mostra a Fig. 15.15-(a).
−→L = [−→r ×−→p ]
= rp−→k
(15.35)
onde r e o raio do cırculo descrito pela massa M. Temos sucessivamente
p = mv = mrω−→L A = mr2ω
−→k
(15.36)
Repare que−→L A e constante em modulo e direccao.
Fig. 15.15 Pendulo conico.
Escolha agora uma origem em B (no pivot). Obtemos agora
| −→L B |=| −→r ′×−→p |=| −→r ′ || −→p |
= MvL = MrLω
(15.37)

15 Momentos de Inercia 261
onde | −→r ′ |= L e o comprimento da corda (vd. Fig. 15.15-(b)). Repare que o modulode−→L B nao e constante porque depende da localizacao do pivot B e a direccao
tambem nao e constante, como e claro na Fig. 15.15-(c).Sendo B um ponto fixo, o modulo de LB e constante, mas a direccao traca um
cone em cada rotacao.A componente em z de
−→L B e constante, enquanto que a componente horizontal
(Fig. 15.15-(c)) traca um cırculo com velocidade angular ω .
15.0.9 Movimento de rotacao de um solido rıgido. Equacao dosmomentos
Vamos determinar qual a grandeza fısica que e responsavel pela variacao do vector−→L num sistema de referencia dado. Diferenciando
−→L em ordem ao tempo, obtemos
d−→L
dt = ddt [−→r ×−→p ]
= d−→rdt ×
−→p +−→r × ddt−→p
=−→v × (m−→v )+−→r × ddt−→p ,
(15.38)
O primeiro termo do segundo membro da ultima equacao e nulo (porque?). Ficamosassim com a equacao dos momentos:
d−→L
dt= [−→r ×−→F ]. (15.39)
Se se verificar −→r ×−→F temos d−→L /dt = 0, isto e,
−→L conserva-se.
PROPOSICAO I: A taxa de rotacao de um corpo rıgido em rotacao em torno deum eixo fixo nao pode ser modificada, excepto pela aplicacao de um torque externo
Num conjunto de N partıculas temos que somar sobre todas elas:
−→L =
N
∑i=1
−→L i =
N
∑i=1
[−→r i×−→p i], (15.40)
e a Eq. 17.172 generaliza-se de imediato a N momentos:
d−→L
dt= ∑
i[−→r i×
−→F i] = ∑
i
−→τ i. (15.41)
A fim de obtermos d−→L /dt = 0, devemos necessariamente ter −→r ×−→F = 0, isto e,
devem-se verificar as seguintes condicoes:
• −→F deve ser paralelo a −→r .• −→F deve apontar para dentro ou para fora da origem, isto e, deve ser uma forca
central.

262 15 Momentos de Inercia
• Se−→F e central, tem-se d
−→L /dt = 0.
Obtemos assim a lei da conservacao do momento angular:
• ⇒−→L e constante.
Se a forca e nao-central, −→L nao se conserva.A grandeza −→r ×−→F chama-se momento da forca ou torque 1:
−→τ = [−→r ×−→F ] (15.42)
d−→L
dt=−→τ . (15.43)
Esta e a equacao fundamental da dinamica do corpo rıgido: a taxa de variacao tem-poral do momento angular iguala o momento da forca (ou torque). Ambos os vec-tores −→τ e
−→L devem ser referidos a mesma origem O de um sistema de coordenadas
inercial.Exemplo 12: Cometas.Um cometa descreve uma elipse em torno do sol com um apogeu (distancia
maior) e um perigeu (distancia menor). Nesses pontos o vector posicao −→r e a ve-locidade −→v sao perpendiculares um ao outro, como ilustra a Fig. 15.16.
Fig. 15.16 Cometa.
QuadroNegro 2
Por exemplo, os dados relativos ao cometa Halley sao os seguintes:
1 Em ingles chama-se “torque” e usaremos neste texto as duas expressoes indiferentemente.

15 Momentos de Inercia 263
• r1 = 8.75×1010 m e v1 = 5.46×104 m/s no perigeu• r2 = 5.26×1012 m, no apogeu.• ⇒ v2 =
8.75×1010
5.26×1012 ×5.46×104 = 9.08×102 m/s.
Exemplo 13: CarrosselUma plataforma com o formato de um disco circular de raio R e massa M roda
sem atrito em relacao ao eixo vertical (Vd. Fig. 15.17). Um estudante de massa mcaminha devagar desde o perımetro em direccao ao centro. A velocidade angular doconjunto quando o estudante se encontra no perımetro e ωi.
• R = 2.0 m.• M = 100 kg e m = 60 kg.• ωi = 2 s−1.
a) Calcule ω quando o estudante esta a distancia r = 0.5 m do centro.O momento de inercia e o do conjunto (plataforma + estudante):
Ii =12
MR2 +mR2. (15.44)
Quando o estudante esta na posicao r < R, o momento de inercia e (lembre-se quetem que ser o somatorio dos momentos de inercia, porque I = ∑i r2
i dmi):
I f =12
MR2 +mr2. (15.45)
Nao havendo algum momento de forca externa em relacao ao centro do disco queactue no sistema (plataforma + estudante), o estudante caminha para o centro O como momento angular constante, Li = L f .
Fig. 15.17 Plataforma + estudante em movimento de rotacao.
Portanto tem-se:
Iiωi = I f ω f( 1
2 MR2 +mR2)ωi = ( 12 MR2 +mr2)ω f
ω f =( 1
2 MR2+mR2)
( 12 MR2+mr2)
ωi
ω f =( 200+240
200+5
)(2) = 4.1rad/s.
(15.46)
b) Calcule a energia cinetica inicial e final.
Ki =12 Iiω
2i = 1
2 (440)22 = 880JK f =
12 I f ω2
f =12 (215)4.12 = 1800J. (15.47)
Verifica-se um aumento da energia cinetica. Este acrescimo provem do trabalhoefectuado pelo estudante ao caminhar do perımetro para o centro do disco. Istosignifica que as forcas internas dentro do conjunto mecanico realizaram trabalho.

264 15 Momentos de Inercia
O estudante encontra-se num referencial acelerado, nao-inercial e sente uma forcacentrıfuga que varia com r. Por sua vez, ele exerce uma forca de reacao que efectuatrabalho, W , e , de acordo com o teorema trabalho-energia cinetica, W = ∆K talresulta num incremento de K.
15.0.10 Dinamica do corpo rıgido
Da equacao fundamental da dinamica rotacional compreedemos que quando umaforca e aplicada de tal forma que a sua direccao nao passa pelo eixo de rotacao,sera comunicada ao corpo um movimento rotacional. A tendencia de um corpo pararodar e determinada pelo momento da forca ou torque 2, −→τ .
Considere a accao da forca−→F sobre uma partıcula tendo o vector posicao −→r . O
momento da forca em relacao a origem do sistema de referencia e:
−→τ = [−→r ×−→F ]τ = rF sinθ ,
(15.48)
O vector −→τ aponta numa direccao perpendicular ao plano definido por −→r e−→F .
Fig. 15.18 O torque τ aponta numa direccao perpendicular ao plano formado pelo vector posicaor e pela forca aplicada F .
Repare que podemos fazer duas projeccoes, ou do vector −→r sobre−→F , ou vice-
versa:
• (a) d = r sinθ : o braco da forca: e a distancia perpendicular desde o eixo derotacao ate a linha de accao de
−→F ; ou seja, momento da forca=braco vezes forca
τ =| −→r ⊥ ||−→F | (15.49)
• (b) Se representarmos−→F em termos das suas componentes, temos: Ft =F⊥, com-
ponente perpendicular a−→r , Ft =F sinθ ; F‖=F cosθ , componente paralelo a−→r .Assim τ=distancia radial vezes forca transversa.
τ =| −→r || −→F t | (15.50)
Concluindo:
• F‖ nao contribui para o momento da forca ou rotacao;• −→r ‖ nao contribui para o momento da forca ou rotacao.
2 A palavra torque exprime “poder de rotacao”. Provem do Latim, torqueo, Eu rodo.

15 Momentos de Inercia 265
Fig. 15.19 bracos da forca.
No Sistema S.I. a unidade fısica de τ e o N.m. Se bem que tal seja igual ao joule,nao se usa esta unidade no torque.
Ha que distinguir forca do momento da forca, como se depreende dos tres casosapresentados na Fig. 15.20.
Fig. 15.20 Forca e momento da forca.
OSCILACOES ELASTICAS: Qualquer conclusao obtida no estudo do movimentolinear pode ser transposta para o movimento rotacional, desde que estabelecamos aseguinte analogia
• momento de inercia⇔Massa;• torque⇔ Forca;• distancia angular θ ⇔ distancia linear.
Resulta daqui que, se antes tınhamos T = 2π√
m/k, no movimento angular dev-eremos ter T = 2π
√I/R, onde R representa aqui o racio R =torque/deslocamento
angular.Exemplo 14: Determine o perıodo das oscilacoes de um pendulo simples de
comprimento l e massa m.Quando o deslocamento e θ , o momento (ou o torque) das forcas restauradoras e
τ = mgl sinθ
≈ mglθ quando θ e pequeno∴ R = momento−do−binario
deslocamento = mglθθ
= mgl(15.51)
O momento de inercia e I = ml2 e, portanto,
T = 2π
√IR
= 2π
√ml2
mlg
= 2π
√lg .
(15.52)
Exemplo 15: Momento das forcas actuando num cilindro.Duas forcas
−→F 1 actuando no raio R1 e
−→F 2 actuando no raio R2 produzem um
momento de forcas resultante por meio da corda enrolada em torno do cilindro,como ilustra a Fig. 15.21.
A forca−→F 1 tem o braco R1 e exerce um momento no sentido horario; −→τ e di-
rigido para dentro da folha, consideremo-lo negativo:
τ =−F1R1. (15.53)

266 15 Momentos de Inercia
Fig. 15.21 Um cilindro pode rodar em torno do eixo z que passa por O. O braco do torque da forcaF1 e R1 e o braco do torque da forca F2 e R2.
O momento da forca−→F 2 e dirigido no sentido anti-horario (−→τ e agora dirigido para
fora da folha), portanto positivo:
τ2 =+F2R2. (15.54)
O momento resultante e:
τres = τ1 + τ2 =−F1R1 +F2R2. (15.55)
Suponhamos que os dados numericos sao os seguintes:
F1 = 5N R1 = 1.0mF2 = 6N R2 = 0.5m (15.56)
donde se obtemτres =−(5)(1)+(6)(0.5) =−2N.m (15.57)
O momento da forca e negativo e portanto o movimento resultante e no sentidohorario.
15.0.11 Sistema isolado. Forcas internas
Sejam duas forcas centrais iguais e opostas. Tem-se
−→r 1×−→F 12 =−F12r1 sinθ1
−→k
−→r 2×−→F 21 = F21r2 sinθ2
−→k
(15.58)
Fig. 15.22 As forcas centrais que duas partıculas exercem uma sobre a outra sao iguais em moduloe de sentido contrario.
Verifica-se a seguinte relacao geometrica, como se depreende da Fig. 15.22:
r1 sinθ1 = r2 sinθ2 (15.59)
Ora a lei da accao-reaccao aplica-se aos pares de forcas (centrais),−→F 12 =−
−→F 21,
logo os momentos anulam-se internamente para um sistema de forcas centrais. Seigualmente se verificar ∑i
−→τ ext
i = 0, conclui-se que−→L = ∑i
−→L i e constante-lei da
conservacao do momento angular.
15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo 267
15.0.12 Dinamica rotacional: aceleracao angular ou torque
Considere uma partıcula em movimento circular de raio r sob a accao de uma forcatangencial
−→F t . Esta forca produz uma aceleracao tangencial at :
Ft = mat (15.60)
O torque de−→F em torno da origem e dado por
τ = Ftr = (mat)r. (15.61)
A aceleracao tangencial esta relacionada com a aceleracao angular α pela seguinterelacao:
at = rα
∴ τ = (mr2)ατ = Iα
(15.62)
O torque que actua sobre a partıcula e proporcional a aceleracao angular. Este e oanalogo rotacional da Segunda Lei de Newton.
BINARIO: Uma forca unica nao e capaz de transmitir a um corpo rıgido ummovimento de rotacao pura. O sistema de forcas mais simples capaz de transmitiruma rotacao pura consiste em duas forcas iguais e opostas, que nao estao na mesmalinha de aplicacao, o chamado binario.
15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo
Considere a rotacao de um corpo rıgido em torno de um eixo fixo. Um corpo econstituıdo por um numero praticamente infinito de elementos de massa dm. Cadamassa dm roda em torno da origem e tem uma aceleracao tangencial at produzidapor Ft . De acordo com a Segunda Lei de Newton, temos assim
dFt = (dm)at (15.63)
O torque respectivo e dado por
dτ = rdFt = (rdm)at . (15.64)
Ora, temos at = rα:dτ = (rdm)rα = (r2dm)α. (15.65)
Os diferentes pontos (ou partıculas) que compoem o corpo rıgido tem diferentes at ,mas o mesmo α . Por integracao, obtemos
τres =∫(r2dm)α = α
∫r2dm (15.66)

268 15 Momentos de Inercia
ou seja−→τ res = I−→α . (15.67)
Fig. 15.23 Um corpo rıgido roda em torno dum eixo que passa pelo ponto O. Cada elemento demassa dm roda em torno de O com a mesma aceleracao angular α , e o torque resultante actuandosobre o corpo e proporcional a α .
Exemplo 16: Uma corda esta enrolada em torno de um cilindro de massa M eraio R (Fig. 15.24). O cilindro pode rodar livremente em torno do seu eixo. A cordae puxada tangencialmente por uma forca constante
−→T . Sabe-se que: M = 15 kg,
R = 6 cm, T = 2 N.a) Qual e a aceleracao angular do cilindro?; b) Qual e a rapidez angular quando
t = 2 s?
Fig. 15.24 Corda enrolada em torno do cilindro de massa M e raio R.
−→τ = I−→α . (15.68)
QuadroNegro 3

15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo 269
Exemplo 17: Como se encontra ilustrado na Fig. 15.25, uma massa m1 deslizasem fricao sobre uma superfıcie horizontal. A polia e um pequeno cilindro de massaM e raio R. A corda encontra-se ligada a massa m2 e puxa a massa m1 sem derraparna polia.
Fig. 15.25 Problema das duas massas e uma polia.
Analisando os digramas das forcas que acutam sobre cada um dos corpos obte-mos:
T1 = m1a1m2g−T2 = m2a2
T2R−T1R = Iα = (MR2)α(15.69)
Como a corda e inextensıvel, a1 = a2 = Rα . Assim, as equacoes anteriores podem-se escrever de novo na forma
T1 = m1a1m2g−T2 = m2a1
T2−T1 = Ma1
(15.70)
Resolvendo em ordem a a1 obtem-se
a1 =m2g
m1 +m2 +M(15.71)
assim como as tensoesT1 =
m1m2m1+m2+M
T2 =(m1+m2)m2gm1+m2+M
(15.72)
Se M = 0 entao a1 = m2gm1+m2
e T1 = T2, caso ja estudado no ambito da cinematicasem momentos de inercia.
15.1.1 Conservacao do momento angular e energia cinetica
A conservacao do momento angular traz implicacoes interessantes no que diz re-speito a energia cinetica total de um sistema mecanico que varia na forma e na suadimensao.
Podemos considerar um sistema de duas partıculas rodando no sentido anti-horario em torno do seu centro de massa. As velocidades de cada uma das massassao v1 = r1ω e v2 = r2ω , donde resulta o momento angular Lc (o C vem de CM):
Lc = (r1 p1)+(r2 p2) (15.73)

270 15 Momentos de Inercia
Repare que somamos porque o momento angular de cada uma das partıculas orienta-se na mesma direccao. Continuando o calculo, obtemos
Lc = (m1r21ω +m2r2
2ω) = Icω (15.74)
Substituindo no termo da energia cinetica, obtemos
K =12
Icω2 =
12
Ic
(Lc
Ic
)2
, (15.75)
ou seja
K =L2
c
2Ic. (15.76)
Exemplo 18: Duas partıculas de massa m encontram-se nas extremidades de umahaste de massa desprezavel. A haste faz um angulo θ com o eixo z (Vd. Fig. 15.26).
Fig. 15.26 Duas partıculas de massa m estao nas extremidades de uma haste que faz um angulo θ
com o eixo de rotacao.
TemosR = r sinθ ;v = ωR = ωr sinθ ,
(15.77)
donde se segue que o momento angular de cada partıcula e dado por
m | −→r ×−→v |= mvr = mωr2 sinθ . (15.78)
Repare agora que−→L 1 e
−→L 2 apontam na mesma direcao, donde resulta o momento
angular total:L = 2mωr2 sinθ . (15.79)
Porem, Lz e a projecao de−→L total (que faz um angulo de 90o−θ ) sobre Oz:
Lz = Lcos(90o−θ) = 2mωr2 sin2θ
Lz = 2mωR2
Lz = Icω.(15.80)
Isto e, temos−→L = Ic
−→ω .
Em resumo:
• −→L = I−→ω : o momento angular varia em proporcao com −→ω . I representa umapropriedade inercial do corpo e mede a sua resistencia a variacao do momentoangular.
• −→p = m−→v : o momento varia proporcionalmente a velocidade −→v . A massa medea resitencia do corpo a variacoes da velocidade.
Veja-se a analogia:

15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo 271
K =L2
z2I ⇔ K = p2
2m(15.81)
Suponha que o momento angular dum sistema mecanico em relacao a um dado eixoz e constante, Lz = constante.
Se o sistema contrai-se e I decresce, a energia cinetica aumenta. Mas, para quetal aconteca, e necessario que haja uma fonte de energia.
Quando estrelas ou galaxias colapsam, a fonte e a gravidade. A energia potencialgravitacional e negativa e aumenta em modulo a medida que os objectos se con-traem. E o que sucede a bailarina quando os seus bracos e pernas sao puxados paradentro e alinhados com o eixo de rotacao (Vd. Fig. 15.27).
Fig. 15.27 Conservacao do momento angular em relacao a um eixo fixo.
Como vimos a equacao fundamental da dinamica rotacional e´
d−→L
dt=−→τ tot = ∑
i
−→τ
exti +−→τ int
i . (15.82)
Se −→τ tot = 0, obtemos a lei da conservacao do momento angular:
O momento angular total dum sistema isolado conserva-se.
No caso de um corpo rıgido em rotacao em relacao a um eixo fixo z com τz = 0, aconservacao do momento angular reduz-se as seguintes expressoes:
dLzdt = 0⇒ τz = 0
Lz = const.⇒ Li = L fIω = const.Iiωi = I f ω f
(15.83)
Exemplo 19: Um objecto de massa m presa numa corda esta a distancia r1 deum centro O em torno do qual move-se circularmente com velocidade angular ω1(Fig. 15.28).
Fig. 15.28 Exemplo 19.
A corda e encurtada ate ter um novo raio r2. Qual e a nova velocidade angularadquirida pelo objecto?
QuadroNegro 4

272 15 Momentos de Inercia
Exemplo 20: Momento angular induzido num electrao por um campo de inducaomagnetico externo
−→B : Uma partıcula de massa m e carga q move-se numa trajectoria
circular de raio r sujeita a uma forca do tipo central. A sua coordenada angular e θ .Um campo magnetico e criado perpendicularmente a orbita da partıcula, ao longodo eixo Oz. Segundo a lei da inducao de Faraday, e induzido um campo electricotangente ao cırculo, Eθ :
Eθ =− 12r
dBr2
dt. (15.84)
a) Qual e a forca que aje sobre a partıcula?
Fθ = qEθ (15.85)
b) Calcule o torque e o momento angular induzido quando o campo−→B atinge o
seu valor estacionario.O torque e dado por:
τ = rFθ
τ =− q2
dBr2
dt(15.86)
dirigido segundo Oz.dLzdt =− q
2dBr2
dt
Lz = Lz(0)− qr2
2 B.(15.87)
Para uma carga negativa q =−e, tem-se
∆Lz =+eB2
r2 (15.88)
Existe uma relacao fundamental entre o momento angular e o momento magnetico−→M : −→
M =q
2m−→L (15.89)
e, neste caso, obtemos
∆Mz =−e2B4m
r2. (15.90)
Podemos verificar que o momento magnetico induzido e sempre oposto ao campoB.
Exemplo 21: Roda de bicicleta em rotacao.Um sujeito sentado num banco rotatorio sustem uma roda de bicicleta, tal como
e mostrado na Fig. 15.29. Ele encontra-se inicialmente em repouso. A roda revolveno plano horizontal com momento angular inicial
−→L o dirigido para cima.
Quando a roda e invertida dum angulo de 180o o que acontece?O sistema e constituıdo pelo estudante + roda + banco.O momento angular total e
−→L o, o que se deve unicamente ao movimento inicial
da roda.

15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo 273
Quando o sujeito fornece um torque (interno ao sistema), a roda inverte-se daforma pretendida. Nao existem torques externos em ralacao ao eixo vertical ac-tuando no sistema. Em consequencia, o momento angular total conserva-se.
Inicial:−→L sist =
−→L o
Final:−→L sist =
−→L su jeito+banco +
−→L roda.
−→L o =
−→L su jeito+banco +
−→L roda−→
L o =−→L su jeito+banco−
−→L o
∴−→L su jeito+banco = 2
−→L o
(15.91)
Fig. 15.29 Sujeito sobre um banco rotatorio + roda.
Se designarmos o momento de inercia do conjunto sujeito + banco, Ip, entaopodemos escrever
Ipωp = 2Ioωo (15.92)
15.1.2 Trabalho e energia no movimento rotacional
Uma forca que actua sobre um corpo e o poe em movimento efectua trabalho sobreesse corpo. O trabalho efectuado pela forca
−→F fazendo com que o corpo rode de um
arco elementar ds = rdθ no intervalo de tempo dt e dado por:
dW = (−→F ·d−→s ) = (F sinφ)rdθ , (15.93)
onde F sinφ e a componente tangencial de−→F . A componente radial nao realiza
trabalho porque e perpendicular a d−→s (Vd. Fig. 15.30).O torque exercido pela forca e
τz = (F sinφ)r (15.94)
e o trabalho elementar associado
dW = τzdθ
W =∫ θ2
θ1τzdθ .
(15.95)
Se o torque for constante tem-se
W = τz∆θ . (15.96)
Observe que esta medida do trabalho efectuado e exactamente analoga ao tra-balho feito por uma forca no movimento rectilıneo.

274 15 Momentos de Inercia
Fig. 15.30 Um corpo rıgido roda em torno de um eixo que passa pela origem O sob a acao de umaforca externa aplicada em P.
Fig. 15.31 Uma forca aplicada a um corpo em rotacao realiza trabalho nesse corpo.
A potencia associada ao trabalho por unidade de tempo e dada por
P =dWdt
= τzdθ
dt= τzω. (15.97)
15.1.3 Teorema do trabalho-energia no movimento rotacional
O trabalho efectuado pelo torque produz uma variacao da energia cinetica do corpode acordo com a sequencia:
τ → α ω1→ ω2.
De facto, verificamos que
τ = Iα = Idω
dt= I
dω
dθ
dθ
dt= I
dω
dθω, (15.98)
ou seja:τdθ = dW = Iωdω. (15.99)
Finalmente, o trabalho total efectuado e assim dado pelo somatorio dos trabalhoselementares
W =∫
θ2
θ1
τdθ′ =
∫ω2
ω1
Iω′dω
′ =12
Iω22 −
12
Iω21 . (15.100)
W = ∆K = K f −Ki =12
Iω22 −
12
Iω21 . (15.101)
Se a forca actuante for conservativa (ex: forca gravıtica, elastica, electrostatica), otrabalho realizado e o negativo da variacao da energia potencial:
−∆U =−U2 +U1 =12
Iω22 −
12
Iω21 . (15.102)
Isto e,12
Iω21 +U1 =
12
Iω22 +U2. (15.103)
No movimento rotacional a energia mecanica total conserva-se:
E =12
Iω2 +U =Const. (15.104)

15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo 275
Exemplo 22: Massas ligadas.Duas massas encontram-se ligadas por uma corda que passa por uma polia com
momento de inercia I (Fig. 15.32). Quais sao as velocidades lineares das massasdepois de se moverem da altura h?
Como e suposto nao haver atrito, a energia mecanica conserva-se:
E1 = E2K1 +U1 = K2 +U2
0 = 12 m1v2 + 1
2 m2v2 + 12 Iω2 +m1gh−m2hg.
(15.105)
Mas sendo v = Rω , obtem-se de imediato
v =
√2(m2−m1)ghm1 +m2 +
IR2
. (15.106)
Podıamos ter seguido um processo de resolucao diferente, obtendo primeiro τ = Iα ,resolvendo depois para α e 2ah = v2, a = αR, e daqui finalmente obtendo v.
Fig. 15.32 Duas massas ligadas por uma corda suspensa numa polia.
15.1.4 Impulso angular
Mostramos previamente que se definirmos um impulso linear
−→I =
∫ t2
t1
−→F (t)dt (15.107)
a variacao do momento linear d−→pdt =
−→F no intervalo de tempo ∆ = t2− t1 e tal que
∆−→p =−→p f −−→p i =
−→I . (15.108)
De modo semelhante, partindo da equacao fundamental da dinamica rotacional
d−→L
dt=−→τ , (15.109)
podemos escrever −→L f −
−→L i = ∆
−→L =−→τ ∆ t
=−→J
∴−→J =
∫ t2t1−→τ dt
(15.110)
Verificamos assim que a variacao do momento angular e igual ao impulso angular.

276 15 Momentos de Inercia
Exemplo 23: Considere um sistema mecanico constituıdo por dois discos commomentos de inercia I e I′, cada um deles em rotacao com velocidades angulares ω
e ω ′o (Vd. Fig. 15.33). A seguir, os dois discos sao colocados um sobre o outro poracao de uma forca externa que actua paralelamente ao eixo de rotacao. No estadofinal, os dois discos rodam com velocidade angular final ω .
Fig. 15.33 Dois discos rodam na configuracao final com velocidade angular ω .
QuadroNegro 5
15.1.5 Cilindros/esferas a rolar
Quando um cilindro de raio R rola (sem deslizar) sobre uma superfıcie horizontalde um angulo θ (Fig. 15.34-(a)) o seu CM move-se de uma distancia s = Rθ . Avelocidade e a aceleracao do CM para a rotacao sem derrapagem sao dadas pelasexpressoes conhecidas
vc =dsdt = R dθ
dt = Rω
ac =dvcdt = R dω
dt = Rα(15.111)

15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo 277
Fig. 15.34 (a)-Na rotacao de um cilindro sem deslizamento de um angulo θ , o seu CM desloca-se de uma distancia s = Rθ ; (b)-Todos os pontos de um corpo ao rodar movem-se numa direcaoperpendicular ao eixo que passa pelo ponto de contacto P. O CM move-se com velocidade vc,enquanto que o ponto P′ move-se com velocidade 2vc.
Apercebemo-nos que os diferentes pontos do objecto tem diferentes velocidadeslineares. A velocidade linear de qualquer ponto esta dirigida perpendicularmente alinha que vai desse ponto ao ponto de contacto P. O ponto de contacto P esta emrepouso relativamente a superfıcie. O eixo que passa por P e e perpendicular a −→v ce o eixo instantaneo de rotacao.
Um ponto generico Q localizado sobre o cilindro possui componentes horizontale vertical da velocidade. Em particular, os pontos P e P′ tem especial interesse.
P : vp = 0C : vc = Rω
P′ : vP′ = 2Rω.(15.112)
Repare que todos os pontos do cilindro possuem a mesma velocidade angular ω .Assim, podemos concluir o seguinte:
Na translacao todos os pontos tem a mesma velocidade v = vc (Fig. 15.35-(a)).Na rotacao, vc = Rω , todos os pontos tem a mesma velocidade angular ω e a
velocidade linear e proporcional a distancia ao eixo de rotacao (Fig. 15.35-(b)).No movimento combinado de translacao e rotacao (Fig. 15.35-(b)), tem-se:
vP = vc−Rω = 0vc = vc +0 = vc
vP′ = vc +ωR = 2vc
(15.113)
O que ha de notavel neste exemplo e que o efeito combinado da translacao do CM
Fig. 15.35 (a)-Translacao; (b)-Rotacao; (c)-Translacao e rotacao.
e da rotacao em torno de um eixo que passa pelo CM e equivalente a uma rotacaopura com a mesma velocidade angular em relacao a um eixo que passa pelo pontode contacto do corpo rolante:
K = 12 IPω2
IP = Ic +MR2
∴ K = 12 Icω2 + 1
2 MR2ω2
= 12 Icω2 + 1
2 Mv2c
(15.114)
Conclui-se assim que: A ENERGIA CINETICA TOTAL DE UM OBJECTO EM ROLA-MENTO E A SOMA DA ENERGIA CINETICA ROTACIONAL EM TORNO DO EIXO DOCM MAIS A ENERGIA CINETICA DE TRANSLACAO DO CM.

278 15 Momentos de Inercia
Iremos enunciar em seguida dois teoremas sem os demonstrar.TEOREMA 1: O deslocamento de um corpo rıgido pode ser decomposto em dois
movimentos independentes: a translacao do centro de massa e a rotacao em tornodo CM.
TEOREMA 2: O movimento de rotacao em torno do CM depende somente dotorque em relacao ao CM, independentemente do movimento de translacao.
15.1.6 Movimento de rolamento de um corpo rıgido
Um tipo de movimento rotacional de um corpo rıgido acontece quando o eixo derotacao e paralelo a ele proprio, isto e, a sua orientacao e constante no espaco.Situacoes onde se encontra o movimento combinado de translacao e de rotacao:bola, cilindro, roda sobre superfıcies planas.
As equacoes do movimento sao:
−→P = M d
−→R
dt =∫ d−→r
dt dmd−→P
dt = M d−→V
dt = M d2−→Rdt = ∑
−→F ext
K = 12 MV 2 + 1
2∫
v2cdm
(15.115)
Para o momento angular temos
−→L = [
−→R ×−→P ]+
∫M[−→r c×−→v c]dm (15.116)
−→L =
−→L or +
−→L s. (15.117)
−→L or - momento angular orbital do CM em relacao a origem.−→
L s - momento angular intrınseco (ou de “spin”) em relacao ao eixo que passapelo CM.
Pode-se mostrar qued−→L s
dt=−→τ c (15.118)
onde −→τ c e o torque em relacao ao CM produzido pelas forcas externas. Este re-sultado e independente do tipo de movimento do CM que, em especial, pode seracelerado. O CM seria neste caso um referencial nao-inercial.
O movimento combinado de translacao e rolamento e um caso de especialrelevancia. A orientacao de
−→L s e constante no espaco com torque paralelo a
−→L s,
embora o modulo possa variar.Como o objecto possui um movimento geral de translacao do CM com uma
rotacao em torno do mesmo CM que se mantem paralelo a si mesmo (ex: sistemaTerra-Sol, Vd. Fig. 15.36), podemos escrever

15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo 279
τs = Isdω
dt = Isα
K = 12 MV 2 + 1
2 Isω2.
(15.119)
Fig. 15.36 Sistema Terra-Sol.
Exemplo 24: Objecto redondo rolando num plano inclinado (Fig. 15.37).Um objecto redondo parte do topo do plano inclinado a partir do estado de re-
pouso. Supoe-se nao haver derrapagem. O movimento de rolamento so e possıvelna presenca de atrito que produz o torque em relacao ao CM.
Nao ha perda de energia porque o ponto de contacto nao se move relativamentea superfıcie! A energia mecanica total conserva-se.
vc = Rω
K = 12 Ic( vc
R
)2+ 1
2 Mv2c
= 12
[IcR2 +M
]v2
c .
(15.120)
∆U =−Mgh∆K =−∆U
12 (
IcR2 +M)v2
c = Mgh
vc =√
2gh1+ Ic
MR2.
(15.121)
Fig. 15.37 Objecto redondo rolando sobre plano inclinado. A energia mecanica conserva-se se naoocorrer derrapagem.
No caso particular do objecto redondo ser uma esfera, tem-se Ic =25 MR2, donde
podemos obter
vc =
√2gh
1+ 25
MR2
MR2
=
√107
gh. (15.122)
Supondo que a esfera percorre a distancia x, qual e a aceleracao alcancada?Sendo h = xsinθ a altura donde parte a esfera, obtemos sucessivamente:
v2c =
107 gxsinθ
v2c = 2acx
ac =57 gsinθ
(15.123)
A aceleracao e menor do que a alcancada por um objecto que nao rola.Exemplo 25: Rolamento sem derrapagem, Fig. 15.38.Qualquer objecto redondo de raio R e massa M rola em torno do seu CM a medida
que desce no plano inclinado de declive θ . Seja I = βMR2 o seu momento de inercia.

280 15 Momentos de Inercia
Temos que resolver o sistema de equacoes
∑τc = Icα
τ f + τg + τN = R f +0+0 = Iα
∑ fx = Mgsinθ − f = Mac
(15.124)
Se o movimento for de rolamento sem derrapagem, temos
vc = Rω; ac = Rα (15.125)
Mgsinθ − IR α = Mgsinθ −β
MR2
RacR
= Mgsinθ −βMac = Mac
∴ ac =gsinθ
1+β.
(15.126)
Fig. 15.38 Diagrama de forcas de uma esfera solida rolando sobre um plano inclinado.
Nao havendo derrapagem a fricao e estatica
fs ≤ µsN
fs =Iα
R = βMR2
R1R
gsinθ
1+β≤ µsMgcosθ
∴ tanθ ≤ µs1+β
β.
(15.127)
Para um angulo superior ao θ determinado pela equacao precedente, o objectodeslizara a medida que rolar no plano inclinado. Porem, se comecar a deslizar, ospressupostos mudam porque v 6= ωR e a 6= αR!
• arco: β = 1;• cilindro: β = 1/2;• esfera: β = 2/5.
(ac)es f era =57 gsinθ ;
(ac)cilindro =23 gsinθ ;
(ac)arco =12 gsinθ .
(15.128)
Exemplo 26: Um disco plano encontra-se sobre uma superfıcie plana que naooferece atrito (Fig. 15.39). A forca
−→F e aplicada na extremidade da corda que se
encontra enrolada em torno do disco. O disco roda em torno do seu eixo vertical emove-se horizontalmente. Aplicacao numerica: M = 2 kg, R = 10 cm, F = 5 N.
Fig. 15.39 Disco sobre superfıcie lisa.
a) Aceleracao do CM:

15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo 281
ac =FM
=52= 2.5m/s2. (15.129)
b) Torques:
α =τc
Ic=
FR12 MR2
=2FMR
=2×5
2×0.10= 50rad/s2. (15.130)
c) Qual e a aceleracao do extremo livre da corda?A velocidade vo da corda no ponto P e a velocidade de P relativa ao CM (vT =
Rω) mais a velocidade do CM relativa a superfıcie:
vo = Rω +Vas =
dvodt = R dω
dt +ac= Rω +ac = 7.5m/s2.
(15.131)
Exemplo 27: Cilindro em queda.Uma corda encontra-se enrolada em torno de cada um dos extremos de um cilin-
dro solido (Fig. 15.40). O cilindro e deixado cair.
Fig. 15.40 Cilindro em queda.
τc = Icα
2T R = 12 MR2α
Mg−2T = Maa = Rα
(15.132)
Resolvendo, obtem-sea = 2
3 gT = 1
6 Mg.(15.133)
Exemplo 28: O estudante e a prancha.Um estudante salta para cima de uma prancha (Fig. 15.41). Qual e a posicao da
prancha 1.2 s apos o salto?
• massa do estudante : m = 70 kg;• massa da prancha : M = 50 kg;• largura da prancha estreita 2b = 5 m;• superfıcie horizontal sem atrito;• velocidade inicial do estudante : v = 3 m/s.
• sistema inicial : prancha + estudante a correr• sistema final : (prancha + estudante) em movimento como corpo rıgido.
Nao ha forcas horizontais e portanto, o momento−→P hor conserva-se:

282 15 Momentos de Inercia
Fig. 15.41 Estudante + prancha.
QuadroNegro 6
Fig. 15.42 Movimento do CM no problema do estudante e da prancha.
No exemplo 28 usamos uma propriedade dinamica importante:EXISTENCIA DE UM PONTO DO CORPO RIGIDO POSSUINDO RELACOES DINAMICAS
PARTICULARES: Se for aplicada uma forca sobre um corpo rıgido e livre de se

15.1 Dinamica do corpo rıgido: rotacao em torno de um eixo fixo 283
mover de qualqer modo e se essa forca passar pelo centro de massa do corpo, essecorpo ficara animado com um movimento de translaccao; se a linha de actuacaodessa forca nao passar pelo centro de massa, o corpo tera como movimento geraluma translaccao e uma rotacao em torno do seu centro de massa
Mostramos na Fig. 15.43 uma comparacao entre as grandezas fısicas do movi-mento linear e rotacional.
Fig. 15.43 Analogias entre as grandezas fısicas do movimento linear e rotacional.
Exemplo: Cada uma das 4 rodas de uma viatura de massa total M tem o raio R emassa m. A viatura e propelida com a acao do torque G aplicado no eixo das rodastraseiras. Calcule a aceleracao da viatura em movimento horizontal (Fig. 15.44).
Fig. 15.44 Viatura em movimento horizontal propelida por acao do torque G.
Seja θ o angulo de rotacao de cada roda. A forca de fricao F nas rodas traseiraspropele a viatura para a frente, enquanto que em cada roda dianteira se exerce umaforca de atrito que obriga a roda a rodar (sem deslizar) e actua no sentido oposto aomovimento. A equacao dinamica aplicada a roda traseira da-nos o resultado:
G−RF =12
mR2 d2θ
dt2 . (15.134)
Nas rodas dianteiras teremos
RF1 =12
md2θ
dt2 . (15.135)
O CM da viatura move-se devido a acao da forca resultante 2−→F −2
−→F 1:
2(−→F −−→F 1) = MR
d2θ
dt2 . (15.136)
Verifica-se que o torque capaz de mover a viatura com as rodas em aceleracao an-gular α = θ e:
G =(m+M)R2θ
2, (15.137)
e a aceleracao da viatura e
a = Rθ =2G
(m+M)R2 (15.138)

284 15 Momentos de Inercia
15.2 Giroscopio
Nesta Secao introduziremos os princıpios basicos do giroscopio. Um giroscopioe um dispositivo mecanico basicamente constituıdo por um volante ou roda emrotacao rapida, possuindo uma energia cinetica muito superior a sua energia po-tencial gravitacional. Foucault definiu em 1852 o giroscopio como um aparelho queexibe um momento angular forte 3.
Considere um giroscopio suportado num ponto de suspensao O, tal como se en-contra ilustrado na Fig. 15.45. Suponha que o movimento do CM e de precessao emrelacao ao eixo vertical. O ponto de suspensao (oupivot) do giroscopio oferece umareaccao que se contrapoe ao peso:
N = Mg, (15.139)
de modo que nao ha movimento vertical.
Fig. 15.45 O movimento de um simples giroscopio em torno de um ponto de apoio sem atrito O.O eixo vertical e o eixo de precessao e o eixo do gisroscopio e o eixo de rotacao (ou spin).
O torque em relacao a origem O e:
−→τ o = [
−→R ×−→F ]
= Mgl sinγ(15.140)
O modulo e τ =mgl sinγ , a direcao e sempre perpendicular a−→ω s e M−→g .−→τ e normalao plano definido por −→ω s e −→ω p =
−→Ω .
O movimento de um simples giroscopio em torno de um ponto de apoio sematrito O descreve um movimento de precessao em relacao ao eixo vertical −→ω p e ummovimento de rotacao (ou spin) em relacao ao seu eixo de simetria, −→ω s.
Assumindo que o movimento de precessao e muito lento, de modo que−→ω p−→ω se possamos desprezar o momento angular devido a precessao, podemos escrever
∴ Lo ∼ Iωsd−→L
dt =−→τ(15.141)
Num intervalo de tempo dt a variacao do momento angular e dado simplesmentepor
| d−→L |=| −→τ | dt = Mgl sinγdt, (15.142)
mostrando-se na Fig. 15.46 a composicao dos vectores.O angulo dφ varrido pelo eixo no intervalo de tempo dt e naturalmente dado por
3 Leon Foucault, “Sur une nouvelle demonstration experimentale du mouvement de la terre fondeesur la fixite du plan de rotation”, Compt. Rend. 35, 421 (1852).

15.2 Giroscopio 285
Fig. 15.46 Variacao do momento angular durante o intervalo de tempo dt.
dφ =dL
Lo sinγ=
Mgl sinγdtLo sinγ
, (15.143)
onde se pode definir uma frequencia de precessao
Ω = ωp =dφ
dt=
MglLo
. (15.144)
Como se depreende, o movimento de precessao e independente do angulo deinclinacao e de facto o movimento pode ser horizontal.
Podemos reescrever a expressao anterior na forma:
ωpLo sinγ = Mgl sinγ−→τ o = [−→ω p×
−→L o]
(15.145)
No caso do giroscopio ser inicialmente largado com −→ω p = 0, ele comeca porcair sob a acao do campo gravıtico. Surge entao um torque que da lugar ao deslo-camento rotacional e o CM eleva-se ate a altura inicial. Em geral acaba-se por so-brepor um movimento de nutacao aos dois movimentos de precessao e spin, materiamuito complexa para se abordar aqui. E extraordinario observar que em lugar dogiroscopio cair sob a accao do seu proprio peso descreve uma trajectoria circularpela accao do torque!
15.2.1 Dinamica linear do giroscopio
Sabemos que−→L o = I−→ω s e denotamos a frequencia de precessao por
−→Ω = −→ω p e o
torque e −→τ .Portanto
−→τ = [
−→Ω × I−→ω s]. (15.146)
Fig. 15.47 Movimento de precessao de um giroscopio girando em torno do seu eixo de simetria.A unica forca externa actuando sobre o giro e a forca normal N e a forca gravıtica Mg. A direcaodo momento angular, L, e ao longo do seu eixo de simetria.
Exemplo 29: O calculo da precessao pode ser tambem feito por outro processo.Considere 2 partıculas de massa m ligadas por meio de uma haste rıgida de compri-mento 2L. O momento angular e Ls em relacao ao eixo z. As massas tem a veloci-dade vo (Fig. 15.48).

286 15 Momentos de Inercia
Fig. 15.48 Precessao giroscopica.
Suponha que o torque e aplicado durante um intervalo de tempo curto ∆ t nomomento em que a haste se encontra ao longo do eixo dos x:
∑(−→F +(−−→F )) = 0, (15.147)
e o CM nao se move.Ocorre uma variacao do momento de cada uma das massas:
∆−→p = m∆
−→v =−→F ∆ t. (15.148)
Portanto ∆−→v e perpendicular a −→v o.
Tal significa que ocorre uma mudanca da direcao da velocidade e a haste roda emtorno de uma nova direcao - o eixo de rotacao inclina-se ligeiramente de um angulo∆ϕ:
∆ϕ ∼ ∆vvo
=F∆ tmvo
(15.149)
O torque e τ = 2FL e Ls = 2mvoL onde L e o comprimento da haste
∴ ∆ϕ = F∆ tmvo
= 2LF∆ t2Lmvo
= τ∆ tLs
(15.150)
ondeΩ =
∆ϕ
∆ t=
τ
Ls(15.151)
denota a frequencia de precessao, como ja foi referido.
Fig. 15.49 Geometria da operacao realizada pelo girocompasso. O girocompasso e semelhante aogiroscopio. E uma bussola que encontra o verdadeiro norte (isto e, a direcao do eixo de rotacaoda Terra) usando uma roda em rotacao rapida movida por um motor electrico. E usado em navios,avioes, ...
Exemplo 29: O giroscopio que faz parte do horizonte artificial para um aviaopossui as seguintes caracterısticas:
m = 5kgI‖ = 8×104g.cm2
l = 0,25cmω = 2094rad/s
(15.152)
a) Calcule o perıodo de precessao T = 2π
Ω.
T =2π
Ω= 2π
I‖ωmgl
= 860s = 14mn20s. (15.153)

15.2 Giroscopio 287
b) Quando o giroscopio tem o ponto de suspensao abaixo do centro de massa,tambem se chama de pendulo giroscopio. Pode-se fazer corresponder ao seuperıodo T um comprimento reduzido L, tal que T = 2π
√Lg . Calcule o seu com-
primento reduzido L.
L =I2‖ω
2
m2l2g= 180km. (15.154)
Repare que a velocidade angular da precessao estimulada e cerca de 1.7×106 vezesinferior a velocidade angular de rotacao em torno do eixo de revolucao.
15.2.2 Nutacao do giroscopio
Ao movimento de precessao pode-se sobrepor o movimento de nutacao que con-siste numa oscilacao do eixo do giroscopio, tal como se assinala na Fig. 15.50
Fig. 15.50 Movimento de nutacao de um giroscopio.
A equacao do movimento rotacional, valida num referencial de inercia, e dadapor
d−→L
dt=−→τ . (15.155)
A passagem de um referencial de inercia para um referencial em rotacao e operadapela transformacao: (
d−→L
dt
)in
=
(d−→L
dt
)rot
+[−→ω ×−→L ]rot , (15.156)
sendo que −→ω representa a velocidade angular do referencial em rotacao. Vamosaqui supor, para simplificar, que os eixos cartesianos se encontram ao longo doseixos pricipais de inercia de um corpo em rotacao. Assim, podemos escrever
Lx = Ixωx ;Ly = Iyωy ;Lz = Izωz, (15.157)
nao esquecendo que os eixos principais estao rigidamente ligados ao corpo solido.Podemos agora introduzir a Eq. 15.157 na Eq. 15.156. E facil ver que a primeiracomponente da Eq. 15.157 e(
dLxdt
)rot
+[−→ω ×−→L ]x = dIxdt +ωyLz−ωzLy
= Ixdωxdt +ωyIzωz−ωzIyωy = τx
(15.158)

288 15 Momentos de Inercia
Como se ve, as equacoes correspondentes as tres componentes podem-se escreverna forma conhecida por Equacoes de Euler:
Ixdωx
dt+(Iz− Iy)ωyωz = τx, (15.159)
Iydωy
dt+(Ix− Iz)ωxωz = τy, (15.160)
Izdωz
dt+(Iy− Ix)ωxωy = τz. (15.161)
Exemplo 30: Movimento de precessao de um giroscopio simetricoO giroscopio simetrico possui a propriedade Ix = Iy 6= Iz. Na ausencia de torque
externo, verifica-se de imediato que a Eq. 15.161 da ωz constante. As restantesequacoes resultam em
ωx +Ωωy = 0 ; ωy−Ωωx = 0. (15.162)
Aqui Ω denota a frequencia de nutacao:
Ω ≡ Iz− Ix
Ixωz. (15.163)
As Eqs. 15.162 tem como solucao
ωx = AcosΩ t ;ωy = AsinΩ t, (15.164)
sendo A uma constante de integracao que pode ser determinada com as condicoesiniciais do problema.

Chapter 16Gravitacao
“Wise is he who enjoys the show offered by the world.”
- Fernando Pessoa
“The Future is indeed within us and is woven by ourselves. Not being fixed, like the Past,it can be transformed by our own efforts. The Reparable of the present soon becomes theIrreparable of the future. The action of Chance, that is to say, of unknown causes, is con-siderable in the march of events, but it has never yet stopped a nation from deciding its ownfate.”
- Gustave Le Bon, in “The World Unbalanced”.
16.1 Lei da Gravitacao Universal
Em 1687 Sir Isaac Newton publicou a lei da gravitacao universal na sua obra Prin-cipia Mathematica. Nela era dito que:
cada partıcula do universo atrai outra partıcula com uma forca que e proporcional ao produtodas suas massas e inversamente proporcional ao quadrado da distancia entre elas.
Na simplicidade desta lei, Newton condensou todas as observacoes astronomicasacumuladas ao longo dos seculos. Numerosos astronomos tentaram explicar a or-dem aparente do movimento do Sol e dos planetas no ceu, em particular os seusaspectos recorrentes:
• ciclo do dia e da noite;• progressao anual dos planetas;• retorno periodico dos planetas.
Em 150 A.C., Claudius Ptolomeu 1 generalizou os trabalhos realizados pelosGregos. A Terra constituıa o centro do sistema cosmologico. Inventou-se os epi-
1 Claudius Ptolomeus foi um notavel astronomo de Alexandria, autor de obras importantes:Tetrabiblos (Astrologia), Geografia e Harmonia Musical. O modelo de Ptolomeu constitui um
289

290 16 Gravitacao
ciclos, cırculos no interior do grande cırculo tracado por cada planeta, chamado odeferente 2. Em particular, admitiu que os centros dos epiciclos de Mercurio e Venusalinhavam-se numa linha recta que ligava a Terra ao Sol. Este modelo explicava avariacao do brilho dos planetas e podia predizer as futuras posicoes dos planetas.Tudo isto esta ilustrado na Fig. 16.1.
Fig. 16.1 Sistema cosmologico de Ptolomeu.
Com o sistema epiciclos-deferente podia-se explicar qualquer movimento planetario,mas a custa de uma excessiva complicacao.
Nicolau Copernico (1473-1543) propos uma teoria radicalmente nova sobre osistema solar, colocando o Sol no centro e a Terra e os outros planetas revolvendoem redor do Sol em cırculos, porem mantendo os epiciclos de modo a manter omovimento circular uniforme que era suposto os planetas manterem. Estava assimcriada a teoria heliocentrica do sistema solar. Este modelo explicava o movimentoretrogrado observado.
Fig. 16.2 O movimento retrogrado dos planetas na perspectiva do modelo heliocentrico deCopernico.
Kepler (1571-1630) introduziu as orbitas elıpticas e quantificou com grande pre-cisao os dados recolhidos por Tycho Brahe (1546-1601).
Leis de Kepler:
• Primeira Lei de Kepler: “O planeta em orbita em torno do Sol descreve umaelipse em que o Sol ocupa um dos focos”.
• Segunda Lei de Kepler: “A linha que liga o planeta ao Sol varre areas iguais emtempos iguais”.
• Terceira Lei de Kepler: “Os quadrados dos perıodos de revolucao dos planetassao proporcionais aos cubos dos eixos maximos de suas orbitas”.
Fig. 16.3 Dados planetarios.
aperfeicoamento do Sistema Deferente-Epiciclo, imaginado por dois astronomos e matematicosgregos Apolonio e Hiparco.2 Deferente significa literalmente aquele que arrasta.

16.1 Lei da Gravitacao Universal 291
16.1.1 Lei da Gravidade de Newton
Sir Isaac Newton conseguiu explicar as Leis de Kepler com apenas algumas leissimples que constituem a Mecanica Newtoniana. Em particular, Newton descobriuque alguns princıpios gerais unificavam o Ceu e a Terra, mostrando que todos osfenomenos na Natureza, aqui na Terra como nos Ceus 3, estavam sujeitos as mesmasleis do movimento e da gravitacao.
Newton mostrou que se duas partıculas tem massas m1 e m2 e estao separadaspela distancia r, o modulo da forca gravitacional que as atrai e dado por:
F =Gm1m2
r2 , (16.1)
onde G = 6.672× 10−11 N.m2/kg2 e a constante da Gravitacao Universal, que eusualmente medida por experencias do tipo de Cavendish 4.
As suas caracterıstica sao as seguintes:
• lei do quadrado inverso;• forca atractiva;• aplica-se a todo o objecto com massa;• os seus efeitos estendem-se ao infinito.
Na forma vectorial esta lei escreve-se:
−→F 12 =−
Gm1m2
r221
−→u r, (16.2)
onde−→F 12 e a forca que m1 exerce sobre m2. De acordo com a lei da accao-reaccao
para forcas centrais, verifica-se sempre
−→F 12 =−
−→F 21. (16.3)
Fig. 16.4 Forca gravitacional de m1 sobre m2.
3 “Venha o teu reino, seja feita a tua vontade, assim na Terra como no Ceu” - excerto do EvangelhoSegundo Sao Mateus, Cap. VI.4 O valor oficial CODATA atribuıdo a G em 1986 foi G = (6,67259 ± 0.00085) × 10−11
m3Kg−1s−2 e foi baseado nas medidas feitas por Luther e Towler em 1982. Contudo, o valorde G foi posto em questao devido a novas medidas feitas por grupos na Alemanha, Nova Zelandiae Russia. Por exemplo, em 1996, um grupo alemao do “German Institute of Standards” lideradopor W. Michaelis obteve um valor para G que e 0.6 % superior ao valor aceite. Outro grupo daUniversity of Wuppertal, Alemanha, liderado por Hinrich Meyer encontrou um valor que e 0.06 %inferior. O grupo russo encontrou uma variacao curiosa no tempo e no espaco que vai ate +0.7 %.Daqui resulta uma controversia, e uma procura para realizar experiencias mais precisas, mas temsido impossıvel ate agora...

292 16 Gravitacao
Fig. 16.5 Mares tal como aparecem num velho Almanaque publicado em Londres por JamesReynolds em 1801. Quando a mare esta no seu maximo chama-se mare alta, mare cheia ou prea-mar; quando atinge o seu nıvel mınimo chama-se mare baixa ou baixa-mar. Podemos dizer que, emmedia, as mares tem um perıodo de 12 horas e 24 minutos. As doze horas devem-se a rotacao daTerra e os 24 minutos sao devidos a orbita lunar. Quando as forcas gravitacionais do Sol e da Luaestao alinhadas, na ocasiao da lua nova e lua cheia, produzem-se mares mais altas, sao as maresde sizıgia (do Grego, sysygos). Pelo contrario, nas luas minguante e crescente as forcas gravita-cionais do Sol e da Lua estao em quadratura, resultando no enfraquecimento da forca resultante eproduzindo-se mares mais baixas: sao as chamadas mares de quadratura.
No nucleo galactico, a formacao das estrelas ocorre no seio das nuvens molec-ulares. Os astronomos acreditam actualmente que uma nuvem de gaz isola-se,afundando-se sobre ela mesma devido ao seu peso (a forca da gravidade). A pressaono nucleo aumenta, aquecendo-o, e assim favorecendo a ocurrencia de reaccoes nu-cleares, na origem da emissao de luz. A nossa Galaxia forma o equivalente a tresvezes a massa solar por ano, o que representa muito pouco em relacao ao que se-ria expectavel, dada a profusao de gas interestelar. E porque? Porque ha uma fontede perturbacao, as nuvens onde se formam as estrelas sao alvo de turbulencia queprovoca a dispersao desse gss, provocada pela actividade das estrelas mais proximasque explodem, criando uma onda de choque. A dimensao das estrelas depende dessaturbulencia e, no seu nascimento, a maioria das estrelas tem a massa aproximada-mente de 0.3 massas solares. Algumas delas atravessam regioes do espaco ricas emmateria, aumentando a sua massa por acrecao de gas. Por exemplo, a nebulosa RCW49, e uma das mais prolıficas produtoras de estrelas na nossa Galaxia.
16.1.2 Energia potencial gravitacional
Mostramos em Seccao anterior que a variacao da energia potencial entre dois esta-dos i e f e dada por
∆U =U f −Ui =−∫ r2
r1
−→F (r) ·d−→r . (16.4)
No caso de uma partıcula m situada acima da superfıcie terrestre, obtem-se:
−→F =−GMT m
r2−→u r
U f −Ui = GMT m∫ r2
r1drr2 = GMT m[− 1
r ]r2r1
U f −Ui =−GMT m(
1r f− 1
ri
) (16.5)
A escolha do ponto de referencia e arbitrario. Seja Ui = 0 quando ri = ∞, tal queF(∞) = 0:
∴U(r) =−GMT mr ,r > RT . (16.6)
Para duas partıculas quaisquer m1 e m2:

16.1 Lei da Gravitacao Universal 293
U(r) =−GMT mr
. (16.7)
Fig. 16.6 Energia potencial gravıtica.
Exemplo 1: A Eq. 16.19 explica um fenomeno de grande importancia em As-tronomia: o colapso gravitacional, que consiste na queda sobre si proprio de umcorpo massivo sob a accao da gravidade. Este fenomeno esta na origem da formacaode estruturas no Universo. A partir de uma distribuicao inicial de materia, o colapsogravitacional conduz a formacao de uma hierarquia de estruturas, tais como agru-pamento de galaxias, grupos estelares, estrelas e planetas. Estime o tempo carac-terıstico do colapso gravitacional. Aplique a formula obtida para estimar o tempode colapso gravitational do Sistema Solar.
Seja uma massa m de gas em queda livre desde a superfıcie de um corpo esfericode massa M e raio R, atraıda pela sua forca gravıtica. Da conservacao da energiamecanica total obtem-se:
Ki +Ui = K f +U f−GMm
Ri= 1
2 mv2− GMmR
⇒ v =√
2GMR ,
admitindo que Ri R. Tal significa que a massa m tem a velocidade v a superfıciedo corpo massivo. O tempo que decorre ate que m atinja o centro do corpo esferico,admitindo que a aceleracao e uniforme, e:
t =Rv=
√R3
2GM=
√3
8π
1√Gρ
, (16.8)
tendo nos inserido a relacao M = ρ43 πR3. O sistema solar possui a massa total M =
2×1033 g, e o raio medio e de R = 7.5×1014 cm. A Eq. 16.8 permite-nos estimaro tempo de colapso do sistema solar em tc ≈ 1.8×109 s.
Exemplo 2: O nascimento das estrelas resulta do gradual colapso gravitacionalde uma nuvem de gas interestelar.
16.1.3 Princıpio da sobreposicao
A energia potencial total associada a um conjunto de partıculas e dada pela somasobre todos os pares (Fig. 16.7). Por exemplo, para um sistema de tres partıculastem-se:
Utot =U12 +U13 +U23
=−G(
m1m2r12
+ m1m3r12
+ m2m3r23
).
(16.9)

294 16 Gravitacao
Fig. 16.7 Diagrama de tres partıculas em interacao.
Generalizando a expressao da energia potencial de N corpos passa-se a escrever:
U =−12
N
∑i= j;(i6= j)
N
∑j=1
GMiM j
ri j. (16.10)
Exemplo 3: Qual e a energia gravitacional da galaxia? Considere que ha nela Nestrelas de massa M.
Repare que temos N termos do tipo ∑Ni=1 e (N− 1) termos do tipo ∑
Nj=1. Daqui
resultaU ≈−1
2GN(N−1)
MR. (16.11)
Se N ≈ 1.6×1011 estrelas e R ∼= 1021 m (distancia media entre estrelas), M ≈ 2×1030 kg, estima-se entao que
U ≈−4×1051J.
Exemplo 4: Energia gravitacional de uma esfera uniforme.Podemos comecar por considerar a energia de interaccao entre um nucleo esferico
pleno de raio r e uma camada esferica de espessura dr que a rodeia. Logo, amassa da esfera e 4πρr3/3 e a massa da camada e 4πr2drρ . Usando o princıpioda sobreposicao, podemos escrever
dU =−G
( 4π
3 r3ρ)(4πr2ρ)
r=−1
3G(4πρ)r4dr. (16.12)
Integrando sobre todas as camadas, imaginando-as como constituindo uma cebola,obtemos sucessivamente:
US =∫
dU =−∫ R
r=013 G(4πρ)r4dr =−G(4πρ)2
3R5
5
US =− 35 G(
4πρ
3 R3)2
1R =− 3
5GM2
R .(16.13)
No caso do Sol, obtem-se:
US ∼=−3(7×10−11)(2×1030)2
5(7×108)∼=−2×1041J.
16.1.4 Energia potencial de uma calote esferica e de uma partıcula
Considere uma partıcula pontual de massa m e uma calote esferica de massa M,espessura t e raio R. A separacao entre o centro da calote e a partıcula e r (Fig. 16.8).

16.1 Lei da Gravitacao Universal 295
Fig. 16.8 Geometria dos calculos da energia potencial de uma calote esferica e uma partıcula. Aespessura da calote e t.
A partıcula esta em P. Considere um anel de material com densidade ρ tendotodos as partes a igual distancia s de P.
A largura do anel e Rdθ , a espessura t e o raio Rsinθ .A massa dM do anel e dada por
dM = (Rdθ).2πRsinθ .t.ρdM = 2πR2tρ sinθdθ .
(16.14)
A energia potencial criada pelo anel no ponto do espaco onde se encontra apartıcula m e
dU =−GmdMs
=−2πGmR2tρ sinθdθ
s(16.15)
A fim de obter a energia potencial total da calote esferica temos que integrar so-bre todo a calote. Mas e mais simples integrar sobre s em lugar de θ e para tal econveniente fazer uma mudanca de variavel:
s2 = r2 +R2−2rRcosθ
2s dsdθ
= 2rRsinθsinθ
s dθ = dsrR
∴ dU =− 2πGmRtρr ds
(16.16)
Ha dois casos a considerar:Caso I: r > R: (m esta fora do escudo)
θ = 0 s = r−Rθ = π s = r+R (16.17)
U(r > R) =∫
dU =− 2πGmRtρr
∫ r+Rr−R ds
U =−Gmr (4πR2tρ).
(16.18)
Mas M =V ρ = (4πR2t)ρ:
∴U =−GmMr
. (16.19)
Concluımos assim que o potencial criado por uma calote esferica de massa M comraio R e exactamente igual ao potencial criado por uma partıcula pontual de massaM localizada no centro (no caso de pontos fora da calote).
−→F (−→r ) =−dU
dr−→u r =−
GMmr2−→u r. (16.20)
Caso II: r < R: (m esta dentro da calote esferica)

296 16 Gravitacao
Consideremos agora o caso em que a partıcula encontra-se dentro da caloteesferica:
θ = 0 s = R− rθ = π s = R+ r (16.21)
O integral a perfazer e o seguinte:
U(r < R) =− 2πGmtρRr
∫ R+rR−r ds =− 2πGmRtρ
r [(R+ r)− (R− r)]=−Gm
R (4πR2tρ) =−GmMR .
(16.22)
Conclui-se assim que o potencial e constante no interior do escudo. A forca exercidana partıcula m e entao nula:
−→F (−→r ) =−dU
dr−→u r = 0 (16.23)
A forca exercida sobre m no interior da esfera anula-se porque por simetria todas aspartes anulam-se par a par. A Fig. 16.9 mostra as curvas de potencial gravıtico e aforca gravitacional que dela deriva.
Fig. 16.9 (a) - Potencial gravıtico; (b) - forca gravitacional.
16.1.5 Descricao da experiencia de Cavendish
A experiencia de Cavendish consiste basicamente num par de esferas, cada par for-mando um halter que tem um eixo comum em torno do qual pode rodar (Fig. 16.10).Um dos halteres esta suspenso por uma fibra de quartzo e e livre de rodar torcendoa fibra. A torsao e medida pela posicao de um raio de luz reflectido por um espelhocolado a fibra. O segundo halter pode girar sobre um eixo de tal modo que cada umadas suas esferas fica muito proxima de uma das esferas do outro halter. A atracaogravitacional exercida entre os dois pares de esferas produz uma torsao da fibra, e ea magnitude da torsao que permite calcular a forca gravitacional.
A forca exercida sobre as massas M e m distantes de r uma da outra e:
F =GMm
r2 . (16.24)
Fig. 16.10 Experiencia de Henry Cavendish.
O torque em relacao ao eixo de suspensao devido ao binario das forcas gravita-cionais por sua vez e

16.1 Lei da Gravitacao Universal 297
−→τ = [
−→L ×−→F ], (16.25)
tendo como moduloτ =
lGmMr2 (16.26)
Mas o fio torcido resiste ao binario criando um torque oposto que segue a lei deHook para os fios de torsao:
τ =−kφ (16.27)
Mostra-se que o perıodo das oscilacoes de um pendulo de torsao e dado por
T = 2π
√Ik, (16.28)
onde o momento de inercia das massas na haste e I = ml2/2 e o angulo de reflexaodo feixe de luz no espelho e dado por θ = 2φ .
Obtem-se as seguintes equacoes:
−kφ = lGmMr2
φ = lGmMkr2
φ ′ = 2lGmMkr2
θ
2 = 2lGmMkr2
(16.29)
O angulo φ ′ corresponde ao angulo total de deflexao.Suponhamos que os resultados de uma experiencia sao os seguintes:
r = 4.65cmM = 1.5kg
m = 0.015kgl = 10cmL = 5.7m
k = 8.5×10−9N.m/rad∆s = Lθ
T ∼ 10 min∆s = 4lLGmM
kr2
= 4×0.10L×6.672×10−11×0.15×1.508.5×10−9×(0.0465)2
∆s = 0.0327L(m)
(16.30)
Para uma distancia do espelho a parede L = 5.7 m, obtem-se um erro experimentalde 2.6 %.
(∆s)teo = 18.6cm(∆s)exp = 19.1cm (16.31)

298 16 Gravitacao
16.1.6 Analise elementar da orbita translunar
Considere o problema de uma nave com massa m movendo-se com a velocidade vno campo gravitacional da Terra de massa MT e da Lua ML. Assumindo que a navenao perturba o movimento da Lua que orbita a Terra num cırculo de raio D, a energiapotencial da nave e dada por
U =−GMT mr− GMLm
r′(16.32)
onde r e r′ sao as distancias desde a Terra e da Lua ate a nave, respectivamente. Asua energia total mecanica e
Em =12
mv2−U(r,r′). (16.33)
Ao longo da linha que une a Terra a Lua, r′ =D−r (e, neste caso, U(r,r′) =U(r)pois D e fixo). Podemos verificar que existe um ponto B onde a forca que age sobrem se anula, isto e,
dUdr|r=B= 0. (16.34)
Da Eq. 16.32 obtemos logo
B =D
1+ ε(16.35)
e
U(B) =− (1+ ε)GmMT
B(16.36)
onde
ε =
(ML
MT
)1/2
(16.37)
Substituindo as massas da Terra e da Lua na Eq. 16.37 verifica-se que ε = 1/9, ouseja, B = 0.90D, a fronteira entre o campo gravıtico da Terra e da Lua encontram-sea cerca de 90 % da distancia Terra-Lua.
Refira-se que a velocidade com que a nave Apollo-8 chegou ao ponto B era devB ≈ 3380 km/h.
Assumindo que a orbita do satelite e elıptica, a sua energia e 5
E =−GMT m2a
(16.38)
onde 2a e o eixo-maior da elipse.Exemplo 5: Supondo que a nave foi colocada numa orbita elıptica de eixo-maior
2a, qual e a velocidade orbital lunar vM (isto e, a velocidade com que a nave chegaa Lua)?
5 Veja o Cap. 16.

16.1 Lei da Gravitacao Universal 299
A energia mecanica total e dada por
Em =−GMT m2a
=12
mv2B +U(B). (16.39)
Obtem-seE = 1
2 mv2− GMT mr
E =−GMT m2a
∴ v =√
GMT (2r −
1a )
(16.40)
onde a ultima expressao da a velocidade da nave em qualquer posicao r da suaorbita. Pondo r = a = D, tem-se
vM =
√GMT
D(16.41)
Mostra-se que se pode reescever a Eq. 16.39 na forma
− D2a
=u2
2− (1+ ε)D
B(16.42)
onde pusemos u≡ vB/vM . Obtemos entao
vM = 3670km/h.u = 0.92
DB = 1+ ε = 1.11∴ 2a = 1.23D.
(16.43)
Concluımos que o eixo-maior da elipse descrita pela orbita da nave e um poucomaior que o mınimo necessario para atingir a Lua, isto e, um pouco mais do que0.9D.
Exemplo 6: Suponha que a nave e injectada a partir de uma orbita circular baixaa distancia r0 do centro da Terra, por exemplo, a 160 km de altitude, ou r0 = 6539km. Calcule a velocidade que devera ser comunicada ao satelite de modo a que anave atinja a Lua. Se escolhermos a orbita elıptica 2a= 1.23D, obtemos v0 = 3949.3km/h. Usando a Eq. 16.41, podemos construir a seguinte tabela:
2a = 1.23D v0 = 3949.3 km/h2a = 0.9D v0 = 3939.7 km/h
2a = ∞ v0 = 3976.7km/h velocidade de escape2a = 2r0 v0 = 2811.5km/h orbita circular
(16.44)
Os resultados apresentados em 16.44 mostram que a velocidade adicional quee necessaria para atingir a Lua e apenas ligeiramente superior a que e necessariapara escapar ao campo gravıtico do sistema Terra-Lua. Note-se tambem que todasas velocidades tem a mesma ordem de grandeza, concluindo-se que o “custo” do

300 16 Gravitacao
Table 16.1 Dados para o Sistema Solar.
Distancia Terra-Lua D 384398.3 kmRaio da Terra RT 6377.8 kmRaio da Lua RL 1738 km
ε2 ML/MT 0.01228Massa da Terra MT 5.983×1024 kg
Constante Gravitacao Universal G 6.67×10−11 N m2 kg−2
voo nao e o unico criterio a ter em conta para selecionar a orbita, pois que em todosos casos tratam-se de missoes extremamente dispendiosas.
Exemplo 7: Sabendo que o perıodo da orbita e dado pela expressao (despreza-sea influencia da Lua):
T = 2π
√a3
GMT(16.45)
determine o tempo que leva a viagem a Lua 6. Admita que se escolheu a orbitaelıptica, tal que 2a = D.
T = 2π
√(1.92×108)3
6.67×10−11×5.983×1024
T = 8.37×105sT ≈ 10 dias.
(16.46)
A viagem a Lua decorre em cerca de 10 dias (ida e volta) no caso de usarmos a orbitaelıptica. As naves Apollo levaram cerca de tres dias percorrendo orbitas diferentes(Fig. 16.11).
Fig. 16.11 Orbita Terra-Lua descrita pelo Apollo-8.
16.1.7 Energia potencial do sistema esfera-partıcula
Considere uma partıcula de massa m a distancia r do centro de uma esfera solidahomogenea de massa M e raio R.
Caso I: r ≥ R:Pode-se imaginar que a esfera solida e constituıda por um grande numero de
camadas desde o nucleo ate a superfıcie de raio R.
6 Na verdade este exemplo ilustra uma orbita muito semelhante a que foi descrita pela sondaSovietica Luna-3 lancada a 4 de Outubro de 1959 e que sobrevoou a face oculta da Luaa 7 deOutubro. Em lugar de uma orbita heliocentrica, a Luna-3 era de facto um satelite da Terra comuma orbita muito excentrica com o raio no apogeu ra = 469000 km e um perıodo de 16.2 dias.

16.1 Lei da Gravitacao Universal 301
Como ja foi abordado na Seccao anterior, a forca e a energia potencial criadapela camada dependem somente da sua massa e da distancia r a que uma partıculam se encontra : −→
F =−GmMr2−→u r ,(r ≥ R)
U =−GmMr ,(r ≥ R).
(16.47)
No interior da esfera o caso difere.Caso II: r ≤ R:A partir do resultado obtido quando tivemos em conta as camadas esfericas, a
forca exercida numa partıcula e devida inteiramente a toda a massa contida entrer = 0 e r = r:
∴ F = GmM (r)r2 ,(r ≤ R). (16.48)
Estes dois casos distintos encontram-se sumariados no grafico da Fig. 16.12.
Fig. 16.12 A forca exercida sobre uma partıcula no exterior da esfera solida homogenea e dadapor GmM/r2 e esta dirigida para o centro. A forca qua actua sobre a partıcula quando ela esta naregiao interna da esfera e proporcional a r e tende para zero no centro.
M (r) e a quantidade de massa no interior de uma esfera de raio r e M e a massatotal da esfera de raio R. Como a esfera e homogenea, ρ , a sua densidade volumicae constante:
ρ = MV = 3M
4πR3 = 3M (r)4πr3
∴ M (r) = M( r
R
)3
∴−→F =−GmMr
R3−→u r
(16.49)
A energia potencial na regiao r ≤ R e obtida a partir da definicao:
U(P2)−U(P1) =−∫ P2
P1
(−→F ·d−→r ). (16.50)
QuadroNegro 1
302 16 Gravitacao
A Fig. 16.13 mostra os graficos da energia potencial e da forca gravitacionalcriada por uma esfera solida homogenea.
Fig. 16.13 Energia potencial e forca de atracao gravitacional exercida sobre uma partıcula demassa m por uma esfera solida homogenea.
16.1.8 Forca gravitacional exercida entre objectos com simetriaesferica
Sejam dois objectos esfericos em atraccao mutua exercendo um sobre o outro aforca:
−→F AB =
GmAmB
r2 (16.51)
onde r e a distancia entre eles (Fig. 16.14).Cada massa elementar do objecto B actua sobre o CM do objecto A, de modo
semelhante ao sistema calote esferica + massa pontual. Somando sobre todos oselementos dm de B a forca resultante actua sobre o CM de A. Usando argumentosde simetria podemos concluir que a forca recıproca actua tambem sobre o CM de B.Pela Terceira Lei de Newton as forcas sao iguais em modulo e opostas em direcao.
Fig. 16.14 A forca gravitacional exercida sobre uma esfera A devido a uma esfera B actua sobre oCM de A.
Se o objecto B nao possui simetria esferica, a forca sobre A continua a actuarsobre o CM de A. Porem, a diferenca agora e que a forca sobre B nao actua sobre oCM de B.
Este resultado vai permitir-nos abordar o caso mais geral de forcas gravitacionaisexercidas sobre objectos extensos 7.
16.1.9 Forcas gravitacionais sobre objectos extensos
Sabemos que a forca gravitacional exercida pela Terra sobre uma partıcula de massami e −→
f i = mi−→g (16.52)
7 Repare bem que nos referimos a objectos que tem volume e forma, nao se trata mais aqui deestudar objectos pontuais.

16.1 Lei da Gravitacao Universal 303
onde−→g e a aceleracao da gravidade. Considerando relativamente pequenos objectosonde se pode assumir −→g constante sobre a extensao do objecto, obtemos
−→F = ∑
i
−→f i = ∑
imi−→g = (∑
i
−→m i)−→g = M−→g , (16.53)
onde M e a massa total do objecto. A questao que agora nos colocamos e a seguinte:em que ponto do objecto actua esta forca efectiva?
Calculemos o torque em torno do CM do objecto resultando da accao de todas asforcas
−→f i:
−→τ c = [∑
i
−→r i×−→f i] = ∑
i
−→r i×mi−→g = (∑
imi−→r i)×−→g . (16.54)
Ora por definicao, ∑i mi−→r i = M
−→R c e como estamos aqui a medir distancias em
relacao ao CM, de modo que podemos por−→R c = 0. Logo, obtemos assim
−→τ c = 0. (16.55)
Em conclusao, a forca total−→F nao pode produzir torques em torno do CM. Isto e,−→
F actua exactamente no CM do objecto. Este ponto tambem e chamado de centrode gravidade do objecto.
Se o objecto for de tal forma extenso que−→g varia em toda a sua extensao, o centrode gravidade nao pode ser facilmente identificado, excepto para objectos esfericos.
Fig. 16.15 As partıculas individuais mi que fazem parte de um objecto sao actuadas por forcasgravitacionais mi g. A soma de todas essas forcas indiciduais e equivalente a uma unica forca queactua em C, o CM do objecto.
16.1.10 Forca de mares (ou forca tidal)
As mares sao as elevacoes e depressoes da superfıcie oceanica devido a accao dasforcas de mare com origem na Lua e no Sol.
As mares afectam a profundidade das aguas dos estuarios e marinas e produzemcorrentes oscilantes. As previsoes das mares sao feitas com as leis de Newton, e oproblema foi resolvido sobretudo por Pierre-Simon Laplace, sendo de grande im-portancia a sua previsao para a navegacao costeira.
Quando um campo gravitacional e uniforme todas as partes de um corpo emqueda livre experimentam a mesma aceleracao. Pelo contrario, se o campo e naounforme a aceleracao varia de ponto para ponto e daqui resultando uma forca difer-encial, provocando um alongamento ou compressao do objecto (Fig. 16.16).
Forcas diferenciais sao forcas de mares, tambem chamadas forcas tidais.

304 16 Gravitacao
Fig. 16.16 (a) num campo gravitacional uniforme um objecto experimenta a mesma aceleracao;(b) Quando o campo nao e uniforme, a gravidade actua diferentemente nas diferentes partes doobjecto. O resultado e uma forca diferencial que tende a alongar um objecto ao longo das linhas decampo ou a comprimi-lo ao longo da direccao perpendicular as linhas de campo.
Considere dois objectos de massa m separados de uma distancia 2a localizados adistancia r da massa M (Fig. 16.18). A forca de mare (ou forca tidal) exercida sobreo objecto iguala a diferenca entre a forca gravitacional em cada um dos extremos:
FT =GMm(r−a)2 −
GMm(r+a)2 = GMm
(r+a)2− (r−a)2
(r−a)2(r+a)2 . (16.56)
Daqui resulta a forca tidal (ou de mare)
FT =4GMma
r3 (16.57)
valida para distancia r a. Repare que trata-se de uma forca que decai rapidamentecomo 1/r3, donde a influencia da Lua ser mais importante da que e exercida peloSol (Fig. 16.17).
Fig. 16.17 As mares resultam em primeiro lugar da forca diferencial criada pela lua. A forcagravitacional exercida sobre a massa dos oceanos no lado proximo da lua e maior, sendo menorno lado mais distante. Desta situacao resulta que a massa oceanica do lado voltado para a lua epara aı atraıda desenvolvendo-se duas pretuberancias de mare e fazendo que um dado lugar possaexperimentar duas mares altas por dia a medida que a Terra roda. A forca da gravidade nao emostrada por ser menor, mas desempenha um papel tambem importante.
16.1.11 Peso e forca gravitacional
Perto da superfıcie terrestre o peso de um corpo de massa m e
w = mg. (16.58)
Se a igualarmos a forca que actua sobre um corpo em queda livre, obtemos a con-stante de aceleracao da gravidade:
mg = GMT mR2
T
∴ g≡ GMTR2
T
(16.59)
Suponha agora que um objecto de massa m esta a altura h acima da superfıcie ter-restre, ou seja, esta a distancia r do seu centro:

16.1 Lei da Gravitacao Universal 305
r = RT +h. (16.60)
Se o corpo esta em queda livre, a sua aceleracao e, digamos, g′:
mg′ = GMT mr2 = GMT m
(RT+h)2
∴ g′ = GMTr2 = GMT
(RT+h)2(16.61)
g′ decresce com o incremento de altitude, atingindo no caso limite g′ = limh→∞ 0.No espaco intersideral os corpos nao tem peso (apenas massa).
Considere a energia potencial de uma partıcula a distancia r do centro:
U(r) =−GMT mr
, (16.62)
sendo que a sua energia potencial a superfıcie da Terra (r = RT ),e dada por
Fig. 16.18 A forca tidal actuando sobre um objecto resulta da diferenca em magnitude da forcagravitacional atraves do objecto.
U(RT ) =−GMT m
RT. (16.63)
A variacao da energia potencial e a sua diferenca:
∆U =U(r)−U(RT ) =−GMT m[
1r− 1
RT
]= GMT m
(r−RT
rRT
)(16.64)
Seja z = r−RT e rRT ≈ R2T , valido se z RT . Obtemos assim
∆U = GMT mR2
Tz
∆U = mgz.(16.65)
∆U = mgz representa a variacao da energia potencial de uma partıcula que ocorrequando se eleva a uma altura z acima da superfıcie terrestre.

306 16 Gravitacao
16.2 Movimento planetario
Os primeiros registos historicos de observacao astronomica datam da Babilonia,feitas no ano 2234 a.C. Em 721 a.C. foi observado o primeiro eclipse. Os mapas,globos (600 a.C.) e o Zodıaco (547 a.C.) foram inventados por Anaximandro 8.
Iremos agora apresentar as Leis de Kepler, obtidas pelo grande sabio alemao aofim de penosos e laboriosos calculos realizados ao longo de 18 anos e usando osdados astronomicos obtidos pelo astronomo dinamarques Tycho-Brahe.
Caso I: orbitas circularesUm corpo de massa m move-se numa trajectoria circular de raio ro em torno de
um objecto massivo com massa M (Sol).A forca actuando no planeta e
F =GMm
r2o
. (16.66)
Se a rapidez do planeta e v, entao a sua aceleracao centrıpeta e
ac =v2
ro
∴ GMmr2o
= mv2
ro
(16.67)
ou seja
v2 =GMro
(16.68)
o raio da orbita fixa a rapidez. O perıodo de uma revolucao e:
T = circun f erencia/rapidezT = 2πro
v .(16.69)
Fig. 16.19 Um corpo de massa m move-se em orbita circular em torno de um corpo de massa M.
∴GMro
=
(2πro
T
)2
(16.70)
donde se obtem aTerceira Lei de Kepler:
T 2 =4π2
GMr3
o. (16.71)
8 Anaximandro de Mileto (609-610 a.C. - c. 546 a.C.) foi um filosofo pre-Socratico e discıpulo deTales. Foi um geografo, matematico, astronomo e polıtico. Anaximandro defendia a ideia de que oprincıpio de tudo reside numa substancia primordial chamada “apeiron”, infinita e indeterminada.

16.2 Movimento planetario 307
Na realidade as orbitas dos planetas sao aproximadamente circulares e esta analisesimples e bastante boa.
orbitas circulares
QuadroNegro 2
Caso II: orbitas elıpticasPrimeira Lei de Kepler: As orbitas dos planetas sao elipses estando o sol num
dos seus pontos focais.
• Sol⇔ planetas;• Terra⇔ satelites.• M⇔ m• mM.
Considere um planeta localizado num dos seus pontos de retorno: rp ou ra.
QuadroNegro 3

308 16 Gravitacao
Portanto o afelio e o perielio correspondem as distancias:
ra = rmax =−GMm2E +
√(GMm
E )2 + L2
2ME
rp = rmin =−GMm2E +
√(GMm
E )2− L2
2ME
(16.72)
Verifica-se tambem que o eixo maior
A = ra + rp =−GMm
E(16.73)
tem um comprimento independente de L. Todas as orbitas com o mesmo eixo maiortem a mesma energia total. Pode-se mostrar que
ε =
√1+
2EL2
m(GMm)2 . (16.74)
Exemplo 8: Um objecto e projectado verticalmente para cima com velocidadeinicial vi (Fig. 16.20). Qual e a altitude alcancada pelo objecto? Assuma que a Terraesta em repouso.
A energia e conservada:Ki +Ui = K f +U f . (16.75)
Fig. 16.20 Um objecto de massa m e lancado para cima da superfıcie terrestre com uma velocidadeinicial vi e atinge a altitude maxima h (MT > m).
16.2.1 Velocidade de escape
Considere um objecto de massa m no campo gravıtico de um corpo de grande massaM. A sua energia total e
E = K +U= 1
2 mv2− GMmr
(16.76)
Assumindo que o objecto e lancado da superfıcie de M com raio R com a velocidadev, tendo no final energia cinetica zero em r→∞, obtem-se rapidamente a velocidadede escape:
Ei = E f12 mv2− GMm
r = 0+0
∴ v =√
2GMR
(16.77)
APLICACAO NUMERICA:

16.2 Movimento planetario 309
M = MR = R
v = 618km/s(16.78)
M = MTR = RT
vT = 11.2km/s.(16.79)
16.2.2 Movimento Planetario Geral
Os satelites artificias tem uma importancia crescente na gestao futura do planeta. Asobservacoes espaciais, complementadas pelas observacoes no solo, sao um instru-mento inultrapassavel no futuro, permitindo saber, por exemplo, onde se encontraagua potavel para irrigacao e exploracao agrıcola, mapear terras araveis e prever asua productividade, prever erupcoes vulcanicas e prospeccao de recursos minerais.
O movimento planetario e, em geral, o problema do movimento central tem umpapel de grande importancia em diferentes topicos de varia areas da fısica, por ex-emplo, na difusao de partıculas, estrutura atomica e navegacao no espaco. Este prob-lema e referido por problema de Kepler ou ainda, o problema dos dois-corpos.
Comecaremos por estudar os aspectos mais importantes do movimento de duaspartıculas sob a accao de um campo central, f (r)−→u r, onde f (r) e qualquer funcaoda distancia entre as partıculas e −→u r e o versor dirigido ao longo das linhas quepassam pelos seus centros.
Nesta seccao iremos comecar por efectuar uma transformacao de coordenadasapropriada para depois, usando as leis da conservacao da energia e do momentoangular, obtermos uma equacao do movimento de facil resolucao. Finalmente, apli-cando ao caso particular do movimento planetario com f (r) ∝ 1/r2, iremos reen-contrar as leis de Kepler.
Consideremos assim o problema fundamental a 2-corpos, onde somente 2 partıculasinteragem uma com a outra.
Duas partıculas de massa m1 e m2 tem os vectores posicoes −→r 1 e −→r 2 num dadoreferencial de inercia. Uma forca central actua sobre ambas, denotando-se por
−→F 12
a forca de m1 sobre m2.
−→F 12 = m1
d2−→r 1dt2
−→F 21 = m2
d2−→r 2dt2
(16.80)
Este problema tem uma resolucao mais facil se substituirmos −→r 1 e −→r 2 por −→r =−→r 2−−→r 1 e passando para as coordenadas do CM das 2 partıculas (Fig. 16.21).
Fig. 16.21 Par de partıculas em interaccao mutua.

310 16 Gravitacao
Sejam:
• −→R : o vector posicao do CM do sistema relativamente a uma origem O.• −→r : o vector coordenada relativa das duas partıculas.
−→R = m1
−→r 1+m2−→r 2
m1+m2−→r =−→r 2−−→r 1(16.81)
Podemos reescreve-las sob a forma
−→r 1 =−→R − m2
M−→r
−→r 2 =−→R + m1
M−→r
(16.82)
onde M = m1 +m2 e−→F 12 =−
−→F 21, de acordo com a lei da accao-reaccao.
Combinando as equacoes anteriores obtem-se
Md2−→Rdt2 = 0, (16.83)
donde obtemosd−→R
dt=−→V c =Const. (16.84)
Na ausencia de forcas externas, o movimento do CM descrito por−→R (t) e uniforme e
e independente do tipo de interacao entre as partıculas, tendo como simples solucao−→R =−→R o+
−→V t. As constantes
−→R o e
−→V dependem das condicoes iniciais e da escolha
do sistema de coordenadas. Esta e uma primeira vantagem da transformacao feita.Podemos ainda obter
m1m2d2−→rdt2 = M
−→F 21. (16.85)
Definindo a massa reduzida µ = m1m2m1+m2
do sistema de 2-partıculas, podemos escr-ever a Eq. 16.85 na forma abreviada
µd2−→rdt2 =
−→F 21. (16.86)
Vemos assim que o problema a dois corpos ficou reduzido ao problema bemmais simples do problema a um corpo! Podemos fazer a seguinte interpretacao daEq. 16.86: a coordenada relativa−→r (t) do sistema de 2-partıculas comporta-se comose se tratasse da coordenada de uma so partıcula de massa µ em movimento nocampo de forcas
−→F 12(
−→r ) que representa a forca mutua exercida entre o par departıculas.
A energia cinetica total no referencial de inercia O pode ser expresso em termosde−→V = d
−→R /dt (velocidade do CM), e −→v = d−→r /dt (velocidade relativa das duas
partıculas).

16.2 Movimento planetario 311
K =12
m1v21 +
12
m2v22 (16.87)
ev2
1 =d−→r 1
dtd−→r 1
dt v22 =
d−→r 2dt
d−→r 2dt . (16.88)
Usando as Eqs. 16.82 para −→r 1 e −→r 2, obtemos
K = 12 M( d
−→R
dt ) · (d−→R
dt )+12 µ( d−→r
dt ) · (d−→rdt )
K = 12 MV 2 + 1
2 µv2 (16.89)
A energia cinetica total no referencial O e a soma da energia cinetica de umapartıcula hipotetica de massa M = m1 +m2 movendo-se com velocidade Vc maisa energia cinetica de uma partıcula de massa µ movendo-se com velocidade relativav.
O momento linear no referencial O e
−→P =−→p 1 +
−→p 2 = M−→V . (16.90)
e, por sua vez, o momento linear “relativo” do par de partıculas e
µ−→v = m1m2
M (−→v 2−−→v 1)= 1
M (m1−→p 2−m2
−→p 1)(16.91)
Se o sistema de 2 partıculas estiver isolado (sem que haja forcas externas actuantes),entao conclui-se que −→
P =Const. (16.92)
e, em particular, no referencial do CM, o momento total e nulo,−→P = 0.
16.2.3 Propriedades Gerais do Movimento Planetario geral
16.2.3.1 Momento angular
Consideremos duas partıculas pontuais m1 e m2, sujeitas a forcas do tipo central esuponhamos que nao existem torques actuando sobre elas. O momento angular dem1 e m2 em torno do seu CM,
−→L c, e dado por:
−→L c =
−→l 1 +
−→l 2 = m1[
−→r ′1×−→v ′1]+m2[
−→r ′2×−→v ′2] =Const.
= µ[−→r ×−→v ],(16.93)
onde−→v ′1 = d−→r ′1/dt e−→v ′2 = d−→r ′2/dt. Usando o vector posicao de m1 e m2 relativosao referencial do CM, temos:
−→r ′1 =m2
m1+m2
−→r−→r ′2 =−
m1m1+m2
−→r .(16.94)

312 16 Gravitacao
Obtem-se entao sucessivamente−→L c =
m1m2m1+m2
[−→r ×−→v ′1]−m1m2
m1+m2[−→r ×−→v ′2]
= µ−→r × (−→v ′1−
−→v ′2)= µ[−→r ×−→v ]
| −→L c |= µr2ω = const.
(16.95)
Este resultado significa que o modulo do momento angular do par de partıculasreferido ao CM e equivalente ao de uma partıcula de massa µ .
16.2.3.2 Energia total
Assumindo que a forca de interaccao−→F exercida entre as duas partıculas e do tipo
central e igual ao gradiente de uma funcao potencial U(r), a energia total do sistemae uma constante do movimento:
Ec =12
MV 2 +12
µv2 +U(r) = const. (16.96)
Fig. 16.22 Momento angular de duas partıculas no referencial do CM.
16.2.4 Movimento planetario-sistema de 2 partıculas
O estudo do movimento planetario ou dum sistema de duas partıculas e tipicamenteo problema relativo aos seguintes sistemas:
• Sol + planeta;• Planeta + Lua;• Terra + satelite artificial.
Podemos escolher o referencial do CM adequadamente, da tal forma que:
−→R = 0⇒−→V = 0. (16.97)
Podemos comecar por escrever as seguintes equacoes:
M = m1 +m2;µ = m1m2
M ;−→r =−→r 2−−→r 1;−→r 1 =− µ
m1
−→r ;−→r 2 =
µ
m2
−→r .
(16.98)

16.2 Movimento planetario 313
A energia total do sistema de 2 partıculas no referencial do CM e dada por
E = K +U (a)= 1
2 µv2 +U(r) (b).(16.99)
Nas Eqs. 16.99(a)-(b) considerou-se que o CM do sistema tem velocidade nula, istoe,−→V = 0, uma escolha apropriada a fim de simplificar a algebra.Agora repare: a velocidade tem componentes radiais e azimutais, a saber
−→v = vr−→u r + vφ
−→u φ . (16.100)
vφ = vt = rω = r(
dφ
dt
);
L = µr2ω = µr2(
dφ
dt
).
(16.101)
Fig. 16.23 (a) Duas partıculas orbitam em torno do seu CM comum localizado no ponto O; (b)A situacao em (a) e descrita em termos de uma partıcula hipotetica de massa µ . O vector r e acoordenada relativa das partıculas.
Em consequencia, a energia apresenta uma dependencia das duas coordenadas,r e θ , facto que torna a visualizacao do movimento difıcil. Porem, se tivermos emconta que:
12
µ(rφ)2 =L2
2µr2 , (16.102)
podemos reescrever a equacao da energia na forma:
E = 12 µ(v2
r + v2φ)+U(r) (a)
∴ E = 12 µv2
r +L2
2µr2 − Gm1m2r (b).
(16.103)
Na Eq. 16.103-(b), o primeiro termo representa a energia devido ao movimento ra-dial no referencial do CM; o segundo termo representa a energia cinetica rotacionalem torno do CM; o ultimo termo e a energia potencial gravitacional.
Como se depreende da Eq. 16.99, e util definirmos uma funcao a que chamare-mos energia potencial efectiva:
Ve f (r)≡L2
2µr2 −Gm1m2
r. (16.104)
Seja k ≡ Gm1m2 = GµM = Gµ(m1 + m2). Esta pequena mudanca de variavelpermite-nos reescrever de novo a energia potencial efectiva numa forma mais com-pacta:
Ve f (r) =L2
2µr2 −kr. (16.105)

314 16 Gravitacao
A energia mecanica total pode-se agora escrever numa forma simplificada, invol-vendo unicamente o movimento radial:
E =12
µv2r +Ve f (r). (16.106)
Em consequencia desta apropriada transformacao podemos agora representa-lagraficamente usando a tecnica dos diagramas de energia 9. A Fig. 16.24 mostraos graficos de ambas as curvas.
Fig. 16.24 A energia potencial efectiva Ve f (r) no caso do movimento planetario. A energia poten-cial comum e U(r) =−GµM/r =−k/r.
16.2.4.1 Solucoes da equacao do movimento
A descricao que acabamos de fazer do problema a 2-corpos nao e totalmente ex-acta porque se os corpos sao esferas homogeneas eles interagem uns com os outroscomo se fossem partıculas ideais. Porem, a maioria dos corpos no sistema solarnem sao perfeitamente homogeneos, nem sao perfeitamente esfericos. A Lua, porexemplo, possui concentracoes massicas anomalas 10. Em particular, debaixo dosMare Imbrium, Serenitatis, Crisium e Orientale estao presentes massas anomalasque alteram a gravidade local, tornando instaveis numa escala de tempo de mesesou anos as orbitas dos satelites artificiais a baixas altitudes em redor da Lua. Asorbitas sucessivas ficam distorcidas levando ao impacto do satelite na superfıcielunar. Sabemos tambem que Mercurio e perturbado ligeiramente por uma pretu-berancia equatorial do Sol. Em ultima instancia, a verdade e que o sistema solare um sistema de varios corpos cuja resolucao matematica encontra-se em aberto.Felizmente, como a massa do Sol e muito superior a de qualquer outro planeta, asperturbacoes introduzidas nas trajectorias dos corpos celestes por outros planetassao muito pequenas, fazendo com que a aproximacao dos dois corpos seja razoavel.
SATELITE ARTIFICIAL: um satelite e um corpo que se move em queda livre emtorno da Terra. Vd. Fig. 16.25.
Se lancarmos horizontalmente um corpo de uma elevacao V , dependendo da ve-locidade inicial, ele caira em D, E, F , G, ou, se a velocidade inicial for suficiente-mente elevada, ele prosseguira num movimento de queda circular em torno da Terra.E o que acontece a qualquer satelite (incluindo a Lua).
Fig. 16.25 Um satelite e um corpo em queda livre em torno da Terra.
9 Desenvolvida num fascıculo anterior10 Denominadas em ingles “mascoons”.

16.2 Movimento planetario 315
A rotacao da Terra provoca um achatamento dos polos e a deformacao das su-perfıcies equipotenciais que deixam se ser paralelas, como mostra a Fig. 16.26.
Fig. 16.26 Devido a rotacao do planeta Terra ocorre uma deformacao das superfıcies equipotenci-ais.
A determinacao do campo gravıtico e util para a determinacao das altitudesdas montanhas, elevacoes, em geofısica em geral, e na determinacao das correntesoceanicas, fundamental para a previsao do tempo.
Para estudar o campo gravıtico terrestre os satelites tem que descrever orbitasde baixa altitude para que os aparelhos de bordo consigam determinar com exac-tidao as inhomogeneidades. Com o aumento da altitude, essas inhomogeneidadesdissipam-se, e a Terra comporta-se a altitudes elevadas (acima dos 20000 km) comose fosse um geoide com um campo gravıtico de simetria esferica (desvanecendo-seos detalhes), como mostra a Fig. 16.27.
Fig. 16.27 Campo gravıtico a diversas altitudes. Com a altitude perde-se os detalhes, aparecendoo campo gravıtico como perfeitamente homogeneo.
O “geoide” e um modelo fısico da forma da Terra. O grande matematico e fısicoalemao Carl Friedrich Gauss definiu o geoide como a “figura fısica da Terra”, isto e,uma superfıcie equipotencial que, em media, coincide com o valor do nıvel mediodas aguas do mar. Ve-se na Fig. 16.27 que a superfıcie do geoide e mais irregulardo que o elipsoide de revolucao com que poderıamos aproximar a forma do planeta(tendo em conta o achatamento dos polos). Porem, o geoide e uma superfıcie maissuave do que a propria superfıcie terrestre. Por exemplo, a superfıcie terrestre variaentre os +8,850 m (Monte Evereste) e os -11,000 m (Fossa das Marianas), enquantoque o geoide varia apenas cerca de ±100 m alem da superfıcie do elipsoide dereferencia.
O facto do planeta apresentar grandes inhomogeneidades do campo gravıtico(assim como qualquer outro corpo cosmico), a orbita de um satelite nao sera per-feitamente Kepleriana (do tipo (a), na Fig. 16.29), como seria de esperar (tendo emconta os calculos desenvolvidos anteriormente), mas antes sera uma orbita do tipo(c).
Se porventura quisessemos efectivamente descrever a orbita de um satelite comgrande precisao, poderıamos recorrer ao modelo EGM96 11 que nos da uma ex-pressao matematica do potencial gravıtico terrestre em qualquer ponto (r,λ ,φ)recorrendo a um conjunto de parametros que vai ate a 360o ordem. A expressaodo potencial no modelo EGM96 tem a forma:
11 Earth Gravity Model 1996.

316 16 Gravitacao
U(r,λ ,φ) =GMT
r
(1+
360
∑n=2
(ar
) n
∑m=0
Pn,m(sinφ)[Cn,m cosmλ +Sn,m sinmλ ]
),
(16.107)onde r e o raio geocentrico (isto e, a distancia ao centro da Terra), φ e λ saoa latitude e longitude geocentricas, respectivamente, tal como sao mostradas naFig. 16.28; Pn,m sao as chamadas funcoes de Legendre normalizadas de grau ne ordem m 12; Cn,m e Sn,m sao os coeficientes (valores numericos) do modeloEGM96 13. Por exemplo: (C20 = −0.484165371736× 10−3, S20 = 0.0); (C21 =−0.186987635955×10−9, S21 = 0.119528012031×10−8),...
Fig. 16.28 Coordenadas geograficas da esfera.
Fig. 16.29 Devido a inhomogeneidade do campo gravıtico terrestre, a orbita de um satelite nao erigorosamente do tipo Kepleriano (a), mas sim do tipo (c). O caso (b) seria um caso intermedio,devido a perturbacao criada pela rotacao da Terra.
Iremos em seguida resolver o problema do movimento planetario, isto e, iremosobter as solucoes das equacoes definidas anteriormente e verificar quais as orbitaspossıveis que daı resultam. Antes de prosseguirmos, repare que as solucoes desteproblema devem ser do tipo:
• r = f (t);• φ = g(t);• r = h(φ)⇒-trajectoria da orbita.
Portanto, temos que resolver o seguinte sistema de equacoes:
vr =drdt =
√2µ(E−Ve f (r)) (a)
dφ
dt = Lµr2 (b)
∴ dφ
dr = Lµr2
1√2µ(E−Ve f (r))
(c)(16.108)
Para comecar, repare que podemos integrar de imediato a Eq. 16.108-(a), obtendo
t− to =∫ r
ro
dr√2µ(E−Ve f (r))
. (16.109)
12 Sao funcoes tabuladas. Por exemplo: P0,0(x) = 1; P1,−1(x) =−P1,1(x)/2; P1,0 = x,..., onde nestecaso x = sinφ .13 Detalhes deste modelo e os seus coeficientes podem ser obtidos no sıtio da NASA:http://cddis.gsfc.nasa.gov/926/egm96/egm96.html

16.2 Movimento planetario 317
Da Eq. 16.108-(b), obtemos facilmente a dependencia angular:
φ −φo =∫ t
to
Lµr2 dt. (16.110)
Dividindo a Eq. 16.108-(b) pela Eq. 16.108-(a), obtem-se
dφ
dr=
Lµr2
1√2µ(E−Ve f (r))
. (16.111)
Chama-se a r(φ) a orbita da partıcula.Considerando o potencial gravıtico U(r) = −k/r, a Eq. 16.108-(c) converte-se
emφ −φo = L
∫ dr
r√
2µEr2 +2µkr−L2, (16.112)
onde φo e uma constante de integracao. Consultando uma Tabela de Integrais 14
verifica-se que a solucao e a seguinte:
φ −φo = arcsin
(µkr−L2
r√
µ2k2 +2µEL2
). (16.113)
Isto e,µkr−L2 = r
√µ2k2 +2µEL2 sin(φ −φo). (16.114)
Resolvendo agora em ordem a r obtem-se finalmente
r =L2
µk
1−√
1+( 2EL2
µk2 )sin(φ −φo). (16.115)
Por convencao, toma-se φo =−π/2 e introduz-se os parametros:
ro ≡ L2
µk (a)
ε ≡√
1+ 2EL2
µk2 (b).(16.116)
ro representa fisicamente o raio da orbita circular correspondente a um dado valorde L, µ e k. ε e um parametro sem dimensoes chamado excentricidade, e quecaracteriza a forma da curva. A Eq. 16.116 pode ser escrita na forma da equacao deuma conica:
r =ro
1− ε cosφ, (16.117)
ou ainda,
14 Por exemplo, Gradshteyn and Ryzhik, Table of Integrals, Series, and Products, Ed. Alan Jeffrey,Fifth edition (January 1994) ISBN number: 0-12-294755-X.

318 16 Gravitacao
ro
r= 1− ε cosφ =
ε pr, (16.118)
que representa uma equacao de uma seccao conica; p e o paramtero focal; ro e osemi-latus rectum. Como ja referimos, ε denota a excentricidade:
ε = e =
√1+
2EL2
µk2 . (16.119)
Pode-se agora inverter a Eq. 16.119 expressando-a em funcao da energia:
E =−µG2M2m2
2L2 (1− e2). (16.120)
E conveniente aqui referir a seguinte relacao:
e =rmax− rmin
rmax + rmin. (16.121)
Da analise dos resultados obtidos podemos concluir:
• Quando Ve f < E < 0, o movimento tem lugar entre dois pontos de retorno rmax ermin. A orbita e uma elipse tendo ro como ponto focal;
• Quando E → 0, rmax → ∞, e a excentricidade e = rmax−rminrmax+rmin
→ 1, isto e, a tra-jectoria descreve uma parabola;
• Quando E > 0, e = rmax−rminrmax+rmin
> 1 e a trajectoria e uma hiperbole, onde rmin e adistancia mınima de aproximacao.
16.2.5 Orbitas caracterısticas
Em resumo, consoante o valor da excentricidade obtemos diferentes tipos de tra-jectorias:
• ε = 0: orbita circular, E = Emin• ε > 1: orbita hiperbolica, E > 0.• ε = 1: orbita parabolica, E = 0• 0 < ε < 1: orbita elıptica, E < 0.
Fig. 16.30 Trajectorias possıveis de um satelite: (a) parabola; (b) elipse; (c) hiperbole.
Recapitulando o que foi explanado anteriormente, temos
E =12
µv2r +Ve f (r), (16.122)

16.2 Movimento planetario 319
onde
Ve f (r) =L2
2µr2 −Gm1m2
r. (16.123)
Da soma de ambos os termos resulta um mınimo:
limr→∞
Ve f (r) = 0. (16.124)
Quando−→L 6= 0, o potencial centrıfugo repulsivo L2/2µr2 e o termo dominante para
pequenos valores de r, enquanto que para grandes valores de r e o potencial gravıticoGm1m2/r que domina.
A energia cinetica associada ao movimento radial e:
K = E−Ve f (r). (16.125)
O movimento fica restringido as regioes onde K > 0 e a natureza do movimentodepende de E (Fig. 16.31).
Fig. 16.31 Grafico da funcao energia potencial efectiva no caso do movimento planetario,mostrando diferentes valores dos raios para duas energias que correspondem a orbita circular eelıptica.
E > 0: Hiperbole r nao tem limites para valores elevados, mas deve exceder umcerto valor mınimo se
−→L 6= 0. As partıculas estao separadas por uma barreira
centrıfuga. (e > 1)E = 0: Parabola orbita que fica no limite entre curva fechada e aberta. (e = 1).E < 0: Elipse O movimento e confinado para grandes e pequenos valores de r.
Duas partıculas formam um sistema fechado. (0 < e < 1).E = Emin: Cırculo r tem um unico valor exacto e as partıculas orbitam em redor
uma da outra a uma distancia constante. (e = 0).
Fig. 16.32 Trajectorias orbitais diferentes correspondendo ao mesmo valor do momento angular.
16.2.6 Orbitas circulares
E tem um valor mınimo quando vr = 0 e dVe f /dr = 0.
Ve f (r) = L2
2µr2 − kr (a)
dVdr =− L2
µr3 +kr2 = 0 (b).
(16.126)

320 16 Gravitacao
Obtem-se daqui o raio da trajectoria circular:
ro =L2
µk, (16.127)
ao qual corresponde a energia mecanica total mınima:
Emin =Ve f (ro) =− µk2
2L2 (a)
U(ro) =− µk2
L2 (b).(16.128)
A energia minıma iguala o valor de Ve f (ro), quando r = 0 e r = ro. A energia totale negativa e e exactamente metade da energia potencial gravıtica:
Emin =−12
U(ro) =−GMm
ro, (16.129)
e o movimento e circular.Exemplo 9: Qual e a velocidade inicial perpendicular a linha que une o centro
da Terra ao satelite, e que e necessaria transmitir ao satelite de modo a forca-lo adescrever uma orbita circular?
Desprezando o atrito o satelite esta unicamente sujeito ao campo gravıticoterrestre, de modo que a aceleracao esta dirigida para o centro da Terra (acel.centrıpeta):
mg = mv2
r∴ v =
√gr
(16.130)
sendo r a distancia do satelite ao centro da Terra e v a velocidade do satelite perpen-dicular a linha que une o centro da Terra ao satelite.
Como a forca gravitacional decresce com o quadrado da distancia, tambem severifica:
g = g0R2
Tr2 (16.131)
donde se obtem
v = RT
√g0
r. (16.132)
A superfıcie da Terra v ≈ 8 km/s (enquanto que a velocidade de escape e 11.27km/s).
Se quisermos colocar o satelite numa orbita geoestacionaria a sua inclinacaorelativa ao plano do equador e nula e devera ser escolhido um r de tal forma queo satelite permaneca sempre sobre o mesmo ponto da superfıcie terrestre, isto e, osatelite devera ter o mesmo perıodo que a Terra:
v =√
grωr =
√gr
∴ r = 3√
g0R2T T 2
4π2 ≈ 4.22×107m.
(16.133)

16.2 Movimento planetario 321
Usamos para RT o valor medio do raio da Terra, pois que o nosso planeta Terra tema forma de um geoide ou esferoide oblato.
Portanto compreendemos agora que os satelites geoestacionarios parecem estarfixos sobre um ponto sobre o equador. As antenas de emissao e recepcao podemestar fixos no solo e sao mais economicas. Estes satelites sao de grande importancianas comunicacoes globais, televisao, previsao do tempo e em comunicacoes mil-itares. Uma desvantagem destes satelites reside na altitude elevada a que saoforcados a estar, levando o sinal electromagnetico aproximadamente 0.25 segundosa fazer ida e volta provocando um atraso significativo do sinal. Outra desvantagemsignificativa esta na dificuldade da recepcao do sinal em latitudes superiores a 60o.Recorre-se entao a satelites com orbitas elıpticas.
Quando o satelite tem uma orbita geosıncrona em torno da Terra quer dizer queele volta a um ponto fixo na Terra exactamente no mesmo dia e instante a esse pontofixo.
Exemplo 10: Mostre que na verdade um satelite em torno da Terra esta em quedapara a Terra.
Considere a situacao da fig. 16.33. No instante t = 0 o satelite esta na posicao P1em orbita circular a velocidade v. No instante posterior t2 esta em P2. Na ausenciade qualquer aceleracao o satelite prosseguiria ao longo da tangencial de P1 e cairiacomo se fosse um projectil disparado por um canhao. Em P2 tera caıdo de
(RT − s)2 + v2t2 = R2T (16.134)
ouv2t2 = 2Rts− s2 (16.135)
Fig. 16.33 Satelite em queda.
Desprezando o ultimo termo, obtemos
s≈ 12
(GMT
R2T
)t2, (16.136)
o que representa a distancia percorrida pelo satelite na sua queda com aceleracaog = GMT/R2
T .
16.2.7 Orbitas elıpticas
As orbitas elıpticas correspondem a E < 0, 0≤ ε < 1,
r =ro
1− ε cosφ. (16.137)

322 16 Gravitacao
Podemos usar a Eq. 16.137 para determinar o valor maximo de r que ocorre paraφ = 0, rmax e o valor mınimo de r que ocorre para φ = π , rmin. Esses sao os pontosde retorno do movimento e correspondem as seguintes expressoes:
rmax =ro
1−ε,(φ = 0) (a)
rmin =ro
1+ε,(φ = π) (b). (16.138)
O comprimento do eixo maior e dado por
A = rmin + rmax = 2a= ro
[ 11+ε
+ 11−ε
]A = 2ro
1−ε2 .(16.139)
Fig. 16.34 (a) Elipse; (b) Geometria para obter as equacao geral da conica; (c) Movimento elıpticode m1 e m2 em torno do sue CM em O. O ponto O e o focus do lado direito da elipse menor e ofocus esquerdo da elipse maior; (d) O movimento correspondente da partıcula hipotetica µ emtorno de O′.
Table 16.2 Definicoes
Planetas Terrarmin = rp perihelio perigeurmax = ra afelio apogeu
Note quermaxrmin
= 1+ε
1−ε
ε = rmax−rminrmax+rmin
.(16.140)
A = 2ro1−ε2 =
2L2µk
1−(1+ 2EL2µk2 )
.
A = k(−E) .
(16.141)
Estes coeficientes aplicam-se as orbitas elıpticas e verifica-se que o comprimento doeixo maior e independente de L. As orbitas com o mesmo eixo maior tem a mesmaenergia. A excentricidade e dada pela seguinte expressao:
ε =
√1+
2EL2
µk2 . (16.142)
Apresenta-se na Tabela 16.3 alguns dados planetarios relevantes.

16.2 Movimento planetario 323
Table 16.3 Dados planetarios dos planetas do sistema solar.
Planeta Diametro (Terra=1) Massa (Terra=1) Semieixo maior (U.A.) Perıodo sideral (Anos) Excentricidade da orbitaMercurio 0.3824 0.0553 0.3871 0.24084 0.2056
Venus 0.9489 0.8150 0.7233 0.61515 0.0068Terra 1 1 1 1.00004 0.0167Marte 0.5326 0.1074 1.5237 1.8808 0.0934Jupiter 11.194 317.89 5.2028 11.862 0.0483Saturno 9.41 95.17 9.5388 29.456 0.0560Urano 4.4 14.56 19.1914 84.07 0.0461
Neptuno 3.8 17.24 30.0611 164.81 0.0100Plutao 1 0.4 0.02 39.5294 248.53 0.2484
16.2.8 Leis de Kepler revisitadas
As leis de Kepler sao leis aproximadas. Recordemos as duas primeiras leis:
1 O planeta move-se numa trajectoria elıptica com o foco na posicao do CM dosistema planeta-Sol (O CM deste sistema esta a 450 km do Sol).
2 O vector posicao do planeta (medido a partir do CM do sistema planeta-Sol) varre areas iguais em intervalos de tempo iguais (dA/dt =constante, vd.Fig. 16.35).
Fig. 16.35 (a) Representacao geometrica da Segunda Lei de Kepler; (b) Ilustracao da Segunda Leide Kepler.
O momento angular conserva-se quando o movimento e sujeito a forcas centrais,como e o caso da forca gravitacional.
Considere um trajecto PP′. Durante o intervalo de tempo ∆ t, o vector posicao−→r (t) varre a area ∆A:
∆A = 12 r2∆φ
lim∆ t→0∆A∆ t = 1
2 r2 lim∆ t→0∆φ
∆ tdAdt = 1
2 r2ω = L2µ
= const.(16.143)
A Segunda Lei de Kepler e valida para qualquer tipo de forca central.
3 O racio do quadrado do perıodo (T 2) pelo cubo do semi-eixo maior (a3) e aprox-imadamente o mesmo para todos os planetas.
dt = 2µ
L dA∫dt = 2µ
L∫
dA(16.144)

324 16 Gravitacao
Para uma revolucao completa temos o perıodo dado por:
T =2µ
LA =
2µ
Lπab. (16.145)
Numa orbita elıptica verifica-se em particular
b = a√
1− ε2, (16.146)
e
a(1− ε2) =
L2
µk. (16.147)
Pode-se assim obter a Terceira Lei de Kepler:
T 2 = 4µ2
L2 π2a2b2 = 4µ2
L2 π2a2a2(1− ε2)
= 4µ2
L2 π2a3 L2
µk = 4µ2π2a3
GMm = 4π2a3
GMmmM
m+M
T 2 = 4π2a3
G(m+M) .
(16.148)
Exemplo 11: Orbita de um satelite 15.Um satelite descreve uma orbita elıptica em redor da Terra. Sabe-se que m
M⇒ µ ≈ m. Suponha que os dados numericos sao os seguintes:
• RT = 6400 km;• m = 2000 kg;• rp = perigeu= 1100 km• ra = apogeu = 4100 km
a) Calcule o valor do eixo-maior da elipse A.
A = (rp + ra +2RT ) kma = 1.8×107 km (16.149)
b) Calcule a energia inicial do satelite antes da descolagem.
Ei =−GMT m
RT=−mgRT =−12.5×1010 J (16.150)
c) Calcule a energia do satelite em orbita.
A = k(−E) =
GµMT(−E) = GMT m
(−E) =(mg)R2
T(−E)
∴ E =−mgR2T
A =− 2×103×9.8×(6.4×106)2
1.8×107 =−4.5×1010 J.(16.151)
d) Calcule a energia (ou o trabalho) requerida para colocar o satelite em orbita,desprezando o efeito do atrito da atmosfera.
15 Kleppner and Kolenkow, “An introduction to mechanics”, (McGraw-Hill, New York, 1973), p. .

16.2 Movimento planetario 325
W = ∆EW = E−Ei = 8×1010 J. (16.152)
e) Calcule o momento angular do satelite na sua orbita.
rmin =r0
1+ε
rmax =r0
1−ε
∴ ε = rmax−rminrmax+rmin
ε = rmax−rminA = 3×103
1.8×104 = 16
ε2 = 1+ 2EL2
mk2 ⇒ L = 1.2×1014kg.m2/s
(16.153)
f) Calcule a velocidade do satelite no perigeu.
E = 12 mv2− k
rrp = (1100+6400)km = 7.5×106 km
∴ vp = 7900m/s.(16.154)
g) O momento angular conserva-se. Porque? Calcule a velocidade no afelio, va.
La = Lpµrpvp = µrava
va =rpvp
ra= 5600m/s.
(16.155)
Exemplo 12: O satelite russo Sputnik I, foi lancado pela USSR a 4 de Outubro de1957 emitindo sinal durante tres semanas 16 e descrevendo uma orbita elıptica, tinhaum perıodo de rotacao em torno da Terra de T = 96 mn 12 s e uma altitude maximade H = 939 km. Este feito tornou a Russia numa potencia espacial e constitui ummarco historico na conquista do espaco. Use a Terceira Lei de Kepler para determi-nar a altura de ejeccao do satelite (Fig. 16.36). Determine tambem a velocidade noperigeu, que corresponde a velocidade de ejeccao.
Sabe-se que:
a = 3√
GM4π2 T 2
∴ a = 6949.85km(16.156)
onde usamos G = 6.674×10−11 m3.kg−1.s−2 e MT = 5.96×1024 kg.
Fig. 16.36 Elementos da orbita elıptica de um satelite artificial da Terra. O centro da Terra O e umdos focos da elipse, Pe e o perigeu, (ponto mais proximo da Terra), Ap e o apogeu (ponto maisdistante), M e o centro geometrico da elipse, e a e o semi-eixo maior. H e h sao as alitudes em Ape Pe.
Como vemos na Fig. 16.36, temos a seguinte relacao geometrica simples degrande utilidade:
16 Era esferico com 84 kg de massa e 58 cm de diametro. A altitude no apogeu era ha = 947 km,inclinacao i = 65.128o, perıodo T = 96.17 min.

326 16 Gravitacao
h+H = 2a−2RT∴ h = 205km (16.157)
Na realidade foi a 215 km da superfıcie, mas este exemplo mostra como as leis domovimento planetario levam-nos a conclusoes imutaveis.
A velocidade de ejeccao calcula-se por meio da seguinte equacao:
vp =√
GMa
RT+HRT+h
∴ vp = 7970m/s.(16.158)
16.3 Fısica no sistema de coordenadas em rotacao
O movimento rotacional e um movimento acelerado. Um referencial em rotacao eum referencial acelerado onde surgem forcas fictıcias.
Pode-se mostrar que num referencial em rotacao verifica-se a seguinte relacaoentre a taxa de variacao temporal do vector posicao −→r :(
ddt−→r)
in=
(ddt−→r)
rot+[−→Ω ×−→r ], (16.159)
onde o sımbolo × denota o produto externo e onde se assume que −→r possui omesmo valor em ambos os referenciais num dado instante. A Eq. 16.159 17 podereescrever-se assim:
−→v in =−→v rot +[
−→Ω ×−→r ]. (16.160)
A Eq. 16.159 e totalmente geral e, em particular, pode ser generalizada paraqualquer vector
−→B (por ex., o vector inducao magnetica):(
ddt−→B)
in=
(ddt−→B)
rot+[−→Ω ×−→B ]. (16.161)
A aceleracao e dada por:
−→a in =(
d−→v indt
)in=(
d−→v indt
)rot
+[−→Ω ×−→v in]
−→a in = [ ddt (−→v rot +[
−→Ω ×−→r ])]rot +[
−→Ω ×−→v rot ]+ [
−→Ω × [
−→Ω ×−→r ]]
∴−→a in =−→a rot +[Ω ×−→r ]+2[
−→Ω ×−→v rot ]+ [
−→Ω [−→Ω ×−→r ]]
(16.162)
Da Eq. 16.162 concluımos que a forca aparente−→F rot num sistema de coorde-
nadas em rotacao e dada por
17 (Repare que o intervalo de tempo e o mesmo em ambos os referenciais, nao e suposto ocorrerefeitos relativistas.

16.3 Fısica no sistema de coordenadas em rotacao 327
−→a rot =−→a in− [Ω ×−→r ]−2[
−→Ω ×−→v rot ]− [
−→Ω × [
−→Ω ×−→r ]]
−→F rot = m−→a rot = m−→a in−m([Ω ×−→r ]+2[
−→Ω ×−→v rot ]+ [
−→Ω × [
−→Ω ×−→r ]])
−→F rot =
−→F +−→F f ict−→
F f ict =−2m[−→Ω ×−→v rot ]−m[
−→Ω × [
−→Ω ×−→r ]]−m[Ω ×−→r ].
(16.163)O primeiro termo a direita da forca fictıcia e chamado forca de Coriolis, o segundotermo, apontando para fora do eixo de rotacao e chamado de forca centrıfuga.Finalmente, o ultimo termo e chamado forca de Euler.
Essas forcas sao em geral consideradas fictıcias porque nao resultam de ver-dadeiras interaccoes fısicas 18, sao o resultado de relacoes puramente cinematicas.
Exemplo 13: Uma pequena esfera desliza sem atrito numa haste rıgida emrotacao em torno de um eixo com momento angular constante ω .
a) Determine a forca exercida pela haste na esfera (Fig. 16.37).Repare que a forca de Coriolis resulta do produto extermo [
−→Ω ×−→v rot ], onde
−→v rot e a velocidade da esfera no referencial em rotacao. A forca de Coriolis, emb-ora fictıcia, realiza trabalho no referencial em rotacao (portanto, acelerado), agindoperpendicularmente a haste, donde resulta o aparecimento de uma “pressao de con-tacto”
−→N , com a direccao oposta a
−→F Cor. Repare tambem que na vertical estao
aplicadas o peso da esfera e a respectiva normal, mas como a resultante e nula, naonos interessa neste problema. A forca centrıfuga e exercida radialmente para fora doeixo de rotacao.
Fig. 16.37 (a) - Forca de Coriolis num referencial em rotacao; (b) - queda de uma massa m de umatorre de altura h = 50 m situada no equador.
Temos assimmar = mr = Fcent
N−FCor = 0Fcent = mω2r
∴ mr−mω2r = 0
(16.164)
A ultima Eq. 16.164 e a equacao do oscilador harmonico, cuja solucao e
r = Aeωt +Beωt . (16.165)
A e B sao constantes de integracao que podem ser determinadas com as condicoesiniciais r(t = 0) = r0 e v(t = 0) = v0.
b) Calcule a expressao da forca de Coriolis.
N = FCor = 2mω rFCor = 2mω2(Aeωt −Beωt).
(16.166)
18 A forca centrıfuga aumenta com a distancia do eixo de rotacao enquanto que as forcas deinteraccao decrescem com a distancia.

328 16 Gravitacao
Como r(t = 0) = r0 = A+B e r(t = 0) = ω(A−B), obtem-se
A = 12 (r0 +
v0ω)
B = 12 (r0− v0
ω)
(16.167)
Exemplo 14: Deflecao de massas em queda livre. Calcule a deflecao a que estasubmetida uma massa m quando cai de uma torre de 50 metros de altura no equador.Veja a Fig. 16.37-(b).
a) Calcule as componentes da velocidade e da forca no referencial da Terra (emrotacao em relacao as estrelas).
As forcas da gravitacao e centrıfuga sao radiais, e a forca de Coriolis assentano plano equatorial, como se depreende aplicando a regra-da-mao-direita. Podemosusar a expressao
−→v rot = r−→u r + rθ−→u θ (16.168)
para representar a velocidade da massa m no referencial em rotacao da Terra. Emseguida, obtem-se as componentes fr e Fθ e a equacao do movimento radial:
QuadroNegro 4
O movimento de queda de m faz-se a superfıcie da Terra e, portanto r ≈ RT . Aequacao do movimento reduz-se a:
r =−g+Ω 2RT=−g′
g′ ≡ g−Ω 2RT
(16.169)
onde designa-se por g′ a constante “efectiva” de aceleracao da gravidade 19.
19 O lancamento de foguetoes e mais vantajoso no equador, aproveitando a velocidade rotacional deTerra que tem o valor maximo de 460 m/s (no equador), devendo ser feita para Este. Os EstadosUnidos escolheram Cape Canaveral (28o de latitude Norte), e a Europa lanca o Ariane desde aGuiana Francesa (5o de latitude Norte).

16.3 Fısica no sistema de coordenadas em rotacao 329
QuadroNegro 5
Exemplo 15: O Pendulo de Foucault.Uma celebre experiencia de pensamento de Newton mostra o efeito absoluto da
forca centrıfuga. Se fizermos rodar um balde com agua em torno do seu eixo, asuperfıcie livre do lıquido adquire uma forma parabolode. O que aconteceria se obalde estivesse parado e em seu lugar rodassem todos os astros do universo? New-ton concluiu que nada aconteceria a superfıcie livre do lıquido, mostrando assim ocaracter absoluto da forca centrıfuga.
Em 1852, Leon Foucault suspendeu um pendulo no tecto do Panteao em Parisdando uma dramatica prova da rotacao da Terra.

330 16 Gravitacao
Para um observador sobre a superfıcie terrestre existem duas forcas fictıcias a terem conta: a forca centrıfuga e a forca de Coriolis. Num plano horizontal do lugar,a forca de Coriolis e dada por 2mvΩ sinλ (procure ver porque), onde λ e a latitudedo lugar, e Ω sinλ e a componente vertical da velocidade angular da Terra.
a) Obtenha as equacoes do movimento da massa m suspensa num fio de compri-mento l.
Designemos o deslocamento em relacao a vertical por r. A forca restauradora emgr/l. As componentes da velocidade de m, radial e transversa, sao r e rθ . As suasaceleracoes sao: ar = r−rθ 2 e aθ = rθ +2rθ . Daqui podemos escrever de imediatoas eqs. do movimento:
m(r− rθ 2) =−mg rl
m(rθ +2rθ) =−2mrΩ sinλ(16.170)
b) Considere que θ + Ω sinλ = 0. Determine o perıodo T das oscilacoes dopendulo.
Inserindo esta condicao na Eq. 16.170-(b), obtem-se θ = 0. Substituindo-a naEq. 16.170-(a) resulta em
r+ω2r = 0ω2 = g
l +Ω 2 sin2λ .
(16.171)
Esta equacao e a equacao do oscilador harmonico. O perıodo das oscilacoes e
T =2π√
gl +Ω 2 sin2
λ
(16.172)
c) Admita que as condicoes iniciais sao: r(t = 0) = 0, θ(t = 0) = θ0 e θ(t = 0) =0. Calcule r e θ(t).
A solucao geral do oscilador harmonico e do tipo r(t) = Acos(ωt +φ), onde phie a chamada fase inicial. Atendendo a r(t = 0) = 0 (normalmente nas experienciascom o pendulo, a massa parte sem velocidade inicial).
r(t) = Acos√
gl +Ω 2 sin2
λ
θ =Const =−Ω sinλ
θ(t) = θ(t = 0)+Ctθ(t) = θ0−Ω sin(λ )t
(16.173)
Concluımos que o pendulo de Foucault ira rodar ao longo do tempo em torno davertical do lugar, devido a rotacao da Terra. Em particular, vemos que no equador,λ = 90o e θ(t) = θ(t = 0): o pendulo nao roda.
Exemplo 16: O limite de Roche, ou raio de Roche 20, e a distancia a que umobjecto cosmico, ligado pela sua propria forca gravitacional, se desintegrara dev-ido a accao da forca tidal exercida por um segundo corpo e excedendo a forca deauto-atraccao do primeiro corpo. No interior do limite de Roche, os materiais even-
20 Edouard Roche, astronomo frances, foi o primeiro a calcular este limite em 1848.

16.3 Fısica no sistema de coordenadas em rotacao 331
tualmente dispersos tendem a formar aneis, enquanto que no exterior do limite deRoche, os materiais tendem a coalescer em partıculas muito pequenas, em poeiracosmica.
Assim, consideremos uma massa m′ pertencendo a um primeiro corpo cosmico(satelite natural ou artificial) de massa m (sendo por hipotese m′ m) com raio r edensidade massica ρs. Seja um segundo corpo com massa M, raio R e densidade ρMsituado a distancia d do primeiro:
Fg = FTGm′m
r2 = 2GMm′rd3
∴ d = r 3√
2 Mm
M = ρM4πR3
3m = ρm
4πr3
3
d = R 3√
2 ρMρm
.
(16.174)
Um satelite natural ou artificial que esteja ligado por forcas mais fortes do quea gravitacao naturalmente que pode orbitar dentro do limite de Roche. E o casode Metis, lua de Jupiter, e Pan, lua de Saturno, pois sao solidos ligados por forcasde tensao fortes. Um cometa poderia quebrar-se no limite de Roche, no caso de asligacoes entre as suas partes forem fracas 21.
21 Nao parece ser o caso de Apofis, o asteroide que pora eventualmente a vida em perigo no nossoplaneta em 13 de Abril de 2036.


Chapter 17Lagrangianos
“Para mim, saber que tenho uma so vida para viver num universo que tambem so tem uma,oferece um paralelismo poetico. A vida e preciosa! So temos cada dia, cada pessoa queencontramos, cada experiencia - nada mais. Desgosta-me que tanta gente atravesse a vidaalienada, sem perceberem que e a unica oportunidade que tem, que nao havera outra”.
- John Archibald Wheeler, celebre fısico norte-americano (1911-2008)
“Natura operatur per modos faciliores et expeditiones ” (Nature works by the easiest andreadiest means).
- Pierre de Fermat, numa carta a M. de la Chambre, 1662.
17.1 Introducao a Mecanica Lagrangiana
Maupertius 1 argumentou que o princıpio da mınima accao (foi o primeiro aenuncia-lo), mostrava a sabedoria do Criador 2: “A Accao e proporcional ao pro-duto da massa pela velocidade e pelo espaco. Agora, eis este princıpio, tao sabio,tao digno do Ser supremo: logo que ocorre uma variacao na Natureza, a quantidadede Accao empregue para esta variacao e sempre a mais pequena possıvel.”
Faremos em seguida uma breve introducao a mecanica lagrangiana, um conjuntode metodos introduzidos por Lagrange e Hamilton, posteriores a Maupertuis 3. Assuas ideias sao muito uteis, porque embora nao conhecamos com detalhe a ver-dadeira natureza dos mecanismos fısicos dos sistemas que pretendemos estudar, a
1 Pierre Louis Moreau de Maupertuis foi um matematico e astronomo frances. Nasceu a 7 de Julhode 1698 em Saint-Malo e morreu em Bale a 27 de Julho de 1759. Curiosamente era filho de umcorsario.2 Maupertuis acreditava que a vis viva (o que hoje representa o dobro da energia cinetica) deve sermınima.3 Estes metodos constituem tambem uma tentativa de construir uma teoria mecanica alternativa ade Newton.
333

334 17 Lagrangianos
aplicacao dos princıpios dinamicos permite-nos obter relacoes entre as varias pro-priedades dos corpos. Em particular, a vantagem do metodo de Lagrange e Hamiltonreside em fazer depender todas as propriedades do sistema fısico de uma simplesfuncao, o Lagrangiano do sistema.
Este capıtulo e uma introducao a mecanica classica avancada.
17.1.0.1 Coordenadas generalizadas
Para definir no espaco um sistema de N partıculas pontuais temos que considerarN vectores posicao −→r i(xi,yi,zi) (i = 1, ...,N), isto e, 3N coordenadas. O numerode grandezas independentes necessarias para determinar univocamente a posicao deum sistema designa-se de numero de graus de liberdade do sistema. No caso queacabamos de referir sao 3N. Na pratica, as coordenadas generalizadas sao compri-mentos ou angulos.
Outros exemplos onde o numero de graus de liberdade e igual a n = 1: altura deuma partıcula constrangida a mover-se verticalmente, z; angulo de rotacao de umpendulo, θ . n = 2: Partıcula em movimento sobre uma superfıcie esferica, (θ ,ϕ).n = 5: duas partıculas ligadas por uma barra rıgida (sao necessarios 6 graus deliberdade no total, 3 graus para cada partıcula, mas havendo uma ligacao, uma dascoordenadas de uma das partıculas pode experimir-se em funcao das coordenadasda outra). n = 6: movimento do corpo rıgido, porque sao necessarios 3 graus deliberdade para descrever o movimento do CM (x,y,z), mais dois graus de liberdadepara descrever o movimento de rotacao (θ ,ϕ), mais um grau de liberdade paradescrever a rotacao em torno deste eixo.
Em geral, o numero mınimo de graus de liberdade (ou de coordenadas),n, necessarios para descrever o movimento ou a configuracao do sistema de Npartıculas em qualquer instante do tempo, e dado por
n = 3N−m, (17.1)
onde m e o numero de constrangimentos do sistema.As grandezas referidas nao tem que ser obrigatoriamente as coordenadas carte-
sianas dos pontos materiais, podendo-se escolher consoante o tipo de problema, ascoordenadas mais adequadas: um comprimento ou umangulo, um comprimento aoquadrado, uma energia, uma quantidade sem dimensao. Chamam-se coordenadasgeneralizadas as N grandezas q1,q2, ...,qN de um sistema com N graus de liber-dade que caracterizam totalmente a sua posicao, e velocidades generalizadas asuas derivadas, qi.

17.1 Introducao a Mecanica Lagrangiana 335
17.1.1 Princıpio da Mınima Accao
A expressao mais geral da lei do movimento dos sistemas mecanicos e dada peloPrincıpio de Hamilton. Segundo este princıpio
PRINCIPIO DE HAMILTON: A dinamica de um sistema mecanico fica perfeita-mente caracterizado por uma funcao
L = L(q1,q2, ...,qN , q1, q2, ..., qN) (17.2)
chamada Funcao de Lagrange ou Lagrangiano. Suponhamos que em dois in-stantes sucessivos t1 e t2 o sistema mecanico ocupa determinadas posicoes comcoordenadas q(1) e q(2). Mostra-se que entre estas posicoes o sistema se movera detal forma que o integral
S =∫ t2
t1L(q, q, t)dt, (17.3)
tenha o menor valor possıvel 4. O integral da Eq. 17.62 chama-se Accao entre osinstantes t1 e t2 (e com a unidade J.s).
Fig. 17.1 Um corpo desloca-se entre dois pontos fixos. Pode-se imaginar uma serie de percursos“virtuais” (curvas a pontilhado) entre esses pontos extremos, mas apenas uma obedece ao princıpioda mınima acao que corresponde a equacao Newtoniana.
Exemplo 1: Uma maca com massa m = 100 g cai de uma altura de 4.9 m.a) Qual o valor da Accao entre o instante inicial (t = 0 s) e o instante em que a
maca atinge o chao (t = 1 s)?Tem-se
m = 100 gH = 4.9 m
O Lagrangiano e dado por
L = T −U =12
mv2−mgy (17.4)
onde escolhemos y para a altura da massa m. A Accao e entao dada por
S =∫ t=1
t=0Ldt (17.5)
Ve-se que e conveniente exprimir o Lagrangiano em funcao do tempo, usando asequacoes
y = h− 12 gt2
vy =−gt(17.6)
4 Em ingles este integral denomina-se Action integral. Embora se chama princıpio da mınimaaccao, na verdade a “Accao” pode ter um maximo, um mınimo, ou mesmo um ponto de infleccao.

336 17 Lagrangianos
Assim, temos
L =12
mg2t2−mg(h− 12
gt2) = mg2t2−mgh (17.7)
e
S =∫ 1
0 (mg2t2−mgh)dt = mg2 t3
3 |t=1t=0 −mght |t=1
t=0=13 mg2−mgh
S =−1.6 J.s.(17.8)
b) Se na lei da queda dos graves, a velocidade fosse constante ou variasse comt2, qual seria o valor da accao S calculada entre os mesmos pontos t0 = 0 s, x0 = 4.9m, e t1 = 1 s, x1 = 0 m?
Suponha que v = const.. Entao terıamos a = 0. O Lagrangiano continua sendo
L = 12 mv2−mgy
S = 12 mv2t−mgvt
(17.9)
A velocidade sendo constante, tem-se v = ∆y/∆ t = 4.9/1 m/s, donde se concluique
S =12
mv2t−mgvt2
2=−1.2 J.s (17.10)
Se a velocidade tivesse a dependencia v = ct2, concluımos que
y = y0− 13 ct3 = h− 1
3 ct3
0 = h− 13 c
∴ c = 3h(17.11)
Logo,L = 1
2 mc2t4−mg(h− 13 3ht3)
S = 12 mc2 t5
5 |10 −mght |10 +
13 mgc t4
4 |10= 3.24 J.s
(17.12)
c) Pode concluir, a partir dos calculos efectuados, isto e, sem resolver as equacoesde Euler-Lagrange, qual destas tres leis descreve a queda dos graves?
Embora so tenhamos parcialmente analisado tres casos, o caso alanlisado naalınea a) corresponde ao menor valor da Accao, tendo-se obtido o seu o valornumerico com a conhecidada lei das quedas dos graves.
17.1.2 Equacoes de Lagrange para uma partıcula
Seja T a trajectoria APB seguida realmente pela partıcula entre os instantes t1 e t2 es-tando a partıcula momentaneamente no ponto P no instante t. Seja T ′ uma trajectoriaactualmente nao descrita pela partıcula mas hipoteticamente possıvel. Suponhamosque as coordenadas do ponto P′ sao (x + δx,y,z), e a velocidade da partıcula aısendo (x+ δ x, y, z) enquanto que as coordenadas do ponto P sao (x,y,z) e as com-

17.1 Introducao a Mecanica Lagrangiana 337
ponentes da velocidade da partıcula sao (x, y, z). Suposemos aqui para simplificarque a trajectoria T ′ difere de T nas coordenadas x.
Impoe-se que a trajectoria T ′ passe pelos pontos M1 e M2 por onde o sistemaefectivamente passou nos instantes t1 e t2, de forma que
δx(t1) = 0, δx(t2) = 0. (17.13)
A velocidade do sistema em x+δx e:
ddt(x+δx) =
dxdt
+ddt(δx) = x+
ddt(δx) (17.14)
Esta expressao deve igualar x+δ x, donde se obtem a igualdade:
δ x =ddt(δx). (17.15)
Na notacao inventada por Lagrange, o sımbolo δ e somente aplicado para variacoes.Os sımbolos da variacao (δ ) e diferenciacao (d) sao permutaveis.
A variacao da accao quando se passa da trajectoria real T para a trajectoria fictıciae:
δS = δ
(∫ t2
t1Ldt)=∫ t2
t1δLdt. (17.16)
Mas atendendo a que o Lagrangiano depende supostamente da posicao (x,y,z), as-sim como das componentes da velocidade (x, y, z), L = L(x, x, t), a variacao δL de Lderiva das variacoes δx de x, e δ x de x:
δL = ∂L∂x δx+ ∂L
∂ x δ xδL = ∂L
∂x δx+ ∂L∂ x
ddt (δx).
(17.17)
Substituindo na Eq, 17.16, obtem-se
δS =∫ t2
t1
∂L∂x
δxdt +∫ t2
t1
∂L∂ x
ddt(δx)dt. (17.18)
O tempo t e aqui considerada uma variavel independente.Obtemos sucessivamente (verifique!)
δS =∫
∂L∂x δxdt +
∫∂L∂ x d(δx),
=∫
∂L∂x δxdt +[ ∂L
∂ x δx]t2t1 −∫
δx ddt
∂L∂ x dt
=∫ t2
t1
[∂L∂x −
ddt
(∂L∂ x
)]δxdt.
(17.19)
O ultimo termo deve ser nulo pois que imposemos δx(t1) = 0 e δx(t2) = 0. Atrajectoria T e real e corresponde ao valor extremo do integral da Accao, isto e, δSdeve ser nulo para qualquer que seja o valor de δx:

338 17 Lagrangianos
ddt
∂L∂ x− ∂L
∂x= 0. (17.20)
O mesmo raciocınio aplicado as variacoes das outras coordenadas da partıcula,levam-nos as restantes equacoes:
ddt
∂L∂ y− ∂L
∂y= 0. (17.21)
ddt
∂L∂ z− ∂L
∂ z= 0. (17.22)
EQUACOES DE EULER-LAGRANGE:As equacoes diferenciais que correspondem ao mınimo da Accao constituem as
Equacoes de Euler-Lagrange.Uma das vantagens da mecanica de Lagrange e o a vontade com que se pode
tratar as coordenadas cartesianas, esfericas, cilındricas. A apresentacao deste metodopode ser generalizado facilmente se, em lugar de escrevermos as equacoes emtermos de (x,y,z), (ρ,φ ,z), ou (r,θ ,φ), usarmos as coordenadas generalizadas(q1,q2, ...,qN).
O Lagrangiano e referido como
L = L(q1,q2, ...,qN ; q1, q2, ..., qN , t), (17.23)
permanecendo o tempo como variavel independente.No caso de um sistema com N graus de liberdade L satisfaz as equacoes:
ddt
∂L∂ qi− ∂L
∂qi= 0,(i = 1,2, ...,N) (17.24)
Exemplo 2: Demonstre que a linha mais curta entre dois pontos a e b sobre asuperfıcie lateral de um cilindro e uma helice.
O comprimento s de uma linha arbitraria sobre o cilindro, entre os pontos a e b edada por:
s =∫ b
a ds (a)s =
∫ ba
√dz2 +dr2 (b)
dr = rdθ
∴ s =∫ b
a
[1+ r2
( dθ
dz
)2]1/2
dz =∫ b
a Φdz. (c)
(17.25)
Sobre a superfıcie do cilindro tem-se r = const. O integral da Eq. 17.25-(c) tem umvalor extremo quando se verifica a seguinte relacao
ddz
(∂Ψ
∂θ ′
)− ∂Ψ
∂θ= 0. (17.26)
Verifica-se logo que∂Ψ
∂θ= 0. (17.27)

17.1 Introducao a Mecanica Lagrangiana 339
Por outro lado∂Ψ
∂θ ′=
r2θ√1+ r2θ 2
= c1, (17.28)
se admitirmos que o passo da helice, θ ′ ≡ dθ/dz, e constante. E, sendo assim,tambem podemos concluir que rθ ′ = c2. Ou seja, integrando esta ultima equacao,obtem-se de imediato:
rθ = c2z+ c3. (17.29)
Podemos considerar que no ponto a as condicoes sao: θ = 0 e z = 0, donde seconclui que c3 = 0. No ponto b, podemos assumir que θ = θ2 e z = z2, e portanto
c2 =rθ2z2,
∴ rθ = rθ2z2
z.(17.30)
O Lagrangiano de uma partıcula livre em coordenadas cartesianas e
L =12
mv2 =12
m(x2 + y2 + z2) (17.31)
e em coordenadas cilındricas, sendo que o elemento diferencial do vector posicaods2 = dr2 + r2dφ 2 +dz2:
L =m2(r2 + r2
φ2 + z2). (17.32)
A forma geral de um Lagrangiano de um sistema fechado de partıculas e
L = ∑i
12
miv2i −U(−→r 1,
−→r 2, ...) (17.33)
ou, na sua forma geralL = K−U (17.34)
Repare que introduzindo o Lagrangiano 17.34 na Eq. de Euler-Lagrange, obtemosa Segunda Lei de Newton:
ddt
∂L∂−→v i
= ∂L∂−→r i
mid−→v idt =− ∂U
∂−→r i
∴−→F i =− ∂U
∂−→r i
(17.35)
Exemplo 3: Determine o Lagrangiano do pendulo plano (Fig. 17.2).
Fig. 17.2 Pendulo plano.
As coordenadas do ponto m sao:

340 17 Lagrangianos
x = l sinφ
y = l cosφ(17.36)
O lagrangeano e obtido depois de se determinar as respectivas componentes da ve-locidade:
dxdt = l dφ
dt cosφdydt =−l dφ
dt sinφ(17.37)
L = 12 m(x2 + y2)−U(y)
L = 12 ml2φ 2 +mgl cosφ
(17.38)
Usando a Eq. de Euler-Lagrange, obtemos finalmente as equacoes do movimento
ddt
∂L∂ φi− ∂L
∂φ= 0
ml2φ +mgl sinφ = 0(17.39)
ouφ +
gl
sinφ = 0 (17.40)
Para pequenos angulos φ 1⇒ sinφ ' φ e rapidamente reencontramos a equacaodo movimento harmonico simples (MHS).
Exemplo 4: Um pendulo simples de comprimento L e peso mg e articuladona massa M, a qual desliza sem atrito no plano horizontal como esta ilustrado naFig. 17.3. Use a equacao de Lagrange para determinar as equacoes do movimentodo sistema.
Seja x(t) o deslocamento da massa M e θ(t) o deslocamento angular do pendulo.A energia cinetica do sistema deve-se ao movimento das duas massas e a energiapotencial deve-se a energia elatica da mola e a posicao do contrapeso m.
QuadroNegro 1

17.1 Introducao a Mecanica Lagrangiana 341
Fig. 17.3 Exemplo 2.
Exemplo 5: Considere o movimento em duas dimensoes, em coordenadas po-lares, sob a accao dum potencial arbitrario U(r,φ).
a) Escreva a expressao da energia cinetica:
T =12
m(r2 + r2φ
2) (17.41)
b) Escreva o Lagrangiano do sistema.
L = T −U =12
m(r2 + r2φ
2)−U(r,φ). (17.42)
c) Quantas Equacoes de Lagrange devera estabelecer?Atendendo a que se tem duas coordenadas (r,φ) precisamos de duas equacoes:
∂L∂ r −
ddt
∂L∂ r = 0, ∂L
∂φ− d
dt∂L∂ φ
= 0 (17.43)
d) Insira o Lagrangiano nas Eqs. 17.49 e obtenha as duas equacoes do movi-mento.
mrφ 2− ∂U∂ r = mr
− ∂U∂φ
= ddt (mr2φ) = 2mrrφ +mr2φ .
(17.44)
e) Qual e o significado fısico das duas equacoes obtidas na alınea anterior?A primeira equacao da-nos a forca centrıpeta, pois que dela obtem-se
Fr = m(r− rφ2). (17.45)
Na segunda equacao, a quantidade (mr2φ) representa o momento angular, de modoque ela representa o torque:
−∂U∂φ
= rFφ =ddt(mr2
φ). (17.46)
17.1.3 Momento generalizado ou momento conjugado.Hamiltoniano
Define-se a j componente do momento generalizado, ou momento conjugado, oumomento canonico pela expressao:
p j =∂L∂ q j
. (17.47)

342 17 Lagrangianos
Chama-se a j componente da forca generalizada a expressao 5:
∂L∂q j
= Fj. (17.48)
Assim a equacao de Euler-Lagrange:
∂L∂q j
=ddt
∂L∂ q j
(17.49)
pode ser lidaFORCA GENERALIZADA=TAXA DE VARIACAO DO MOMENTO.Se o Lagrangiano nao contem explicitamente uma dada coordenada q j, entao
essa coordenada e dita cıclica (ou coordenada ignoravel), e o momento conjugadocorrespondente p j e dito conservado.
Exemplo 6: O Lagrangiano de um projectil de massa m na proximidade da su-perfıcie terrestre e dado por
L =12
m(x2 + y2 + z2)−mgz. (17.50)
As coordenadas x e y sao coordenadas cıclicas. Tem-se px = ∂L/∂ x = mx =constante, pois que d
dt∂L∂ x = mx = 0. O mesmo verifica-se para a coordenada y.
Uma segunda formulacao muito semelhante a da Mecanica Quantica e a damecanica de Hamilton. Nesta formulacao, em lugar do Lagrangiano, define-se umaquantidade chamada Hamiltoniano, a qual sao aplicadas as equacoes do movimentode Hamilton. A diferenca mais notoria entre as duas formulacoes e a seguinte:enquanto que as equacoes de Euler-Lagrange descrevem o movimento de umapartıcula por meio de uma equacao diferencial de segunda ordem, as equacoes deHamilton descrevem o movimento por meio de um sistema de duas equacoes difer-enciais de primeira ordem acopladas.
O Hamiltoniano H de um sistema mecanico e definido pela expressao:
H(q, p, t) = ∑i
piqi−L. (17.51)
H e funcao das coordenadas generalizadas e do momento do sistema. As equacoesdo movimento podem ser obtidas das equacoes de Hamilton:
qi =∂H∂ pi
pi =− ∂H∂qi
.(17.52)
Se as coordenadas generalizadas nao dependem explicitamente do tempo, entao oHamiltoniano do sistema iguala a energia mecanica total:
5 Este termo nao representa necessariamente uma forca, mas actua como uma forca e daı vem oseu nome.

17.1 Introducao a Mecanica Lagrangiana 343
H = K +U = E. (17.53)
Exemplo 7: Resolva o problema do oscilador harmonico simples usando amecanica de Hamilton.
O sistema e conservativo, logo a energia cinetica e
K =p2
2m, (17.54)
e a energia potencial e
U =12
kx2 (17.55)
O Hamiltoniano e neste caso dado por
H(x, p) = K +U= p2
2m + 12 kx2.
(17.56)
Substituindo nas duas eqs.de Hamilton, obtem-se
dxdt =
∂H∂ p
= ∂
∂ p (p2
2m + 12 kx2)
= pm .
(17.57)
d pdt =− ∂H
∂x
=− ∂
∂x (p2
2m + 12 kx2)
=−kx(17.58)
17.1.4 Alguns rudimentos de Mecanica Quantica nao-relativista ?
O estudo feito das propriedades do movimento levam-nos agora de modo mais es-correito do domınio macroscopico para uma descricao microscopica da natureza.Restringimo-nos apenas a descricao de uma partıcula ideal de massa m animada comvelocidade muito pequena quando comparada a velocidade da luz, v c. Quandoa mecanica classica combina-se com a electrodinamica com o fito de descrever osfenomenos atomicos, chegam-se a conclusoes que por vezes colidem com a ex-periencia. Por exemplo, segundo a electrodinamica, os electroes em orbita em tornodo nucleo atomico deveriam perder energia por emissao de radiacao, caindo para onucleo, o que nao acontece. Para contornar este obstaculo, Niels Bohr postulou acondicao de quantificacao
∫pdq = nh, permitindo o estudo do espectro do atomo
de hidrogenio, que veremos ja a seguir.Exemplo 8: Condicao de quantificacao de Bohr e espectro do atomo de hidrogenio.Niels Bohr determinou as orbitas estacionarias dos electroes no atomo de hidrogenio,
propondo que as suas orbitas obedeciam a uma condicao de quantificacao:

344 17 Lagrangianos∫pdq = nh, (17.59)
onde n = 0,1,2, ... e um numero inteiro e h = 6.6× 10−34 kg.m2/s e a constantede Planck, que nos coloca no domınio quantico (miscroscopico) da materia. O inte-gral da Eq. 17.59 estende-se a uma volta completa do electrao em torno do nucleoatomico, sendo p e q, resp., o momento linear e a posicao do electrao.
Determine os raios e as energias das orbitas de Bohr.A forca centrıpeta iguala a forca de Coulomb que atrai o electrao ao nucleo
atomico positivo (um protao):Fc = FCmv2
r = e2
r2(17.60)
onde pusemos e2 = q2/4πε0, sendo q a carga electrica do electrao, q = 1.6×10−19
C.Por outro lado a condicao de quantificacao de Bohr da-nos∫
pdq =∫
mvds = mv2πr = nh∴ mvr = n h
2π= nh.
L = mvr = nh(17.61)
Introduziu-se a constante h-bar (le-se “ache-bar”) h = h/2π . Concluımos que osmomentos angulares do electrao estao quantificados e sao multiplos inteiros de h.
rn =e2
mv2
rn =h2
me2 n2.(17.62)
Seja n = 1 a primeira orbita, tem-se r1 = h2/me2 = 0.5292× 10−8 cm, que repre-senta o raio do atomo de hidrogenio.
A energia do atomo de hidrogenio pode ser obtida a partir da energia mecanicatotal:
E =mv2
2− e2
r(17.63)
Usando a Eq. 17.60, obtem-semv2
2 = 12
e2
r∴ E =− e2
2r
(17.64)
e a orbita de raio rn corresponde a energia
En =−e2
2rn=−me4
2h21n2 (17.65)
O estado fundamental do atomo de hidrogenio H(n = 1) tem a energia
E1 =−me4
2h2 = 13.54eV. (17.66)
17.1 Introducao a Mecanica Lagrangiana 345
Exemplo 9: Equacao de Schrodinger.Em Mecanica Quantica qualquer observavel e representada por um operador.
Os valores que uma dada observavel L pode assumir compatıveis com a observacaosao chamados valores proprios 6 do operador quantico L 7. Em mecanica classicaos valores proprios podem assumir uma gama de valores contınuos. Em mecanicaquantica, os valores proprios podem assumir valores contınuos, mas tambem valoresdescontınuos.
O formalismo matematico da mecanica quantica e baseado na ideia de quecada estado de um sistema quantico e descrito num determinado instante por umafuncao 8 das coordenadas Ψ(−→r , t), cujo quadrado do modulo |ΨΨ ∗ | representa adistribuicao da probabilidade da ocorrencia de uma dada configuracao do sistemaquantico. Ψ chama-se funcao de onda do sistema.
Assim, associam-se as observaveis energia E e momento linear p os seguintesoperadores:
E→ ih ∂
∂ tpx→ −ih ∂
∂x(17.67)
Substituindo no Hamiltoniano associado a uma partıcula de massa m movendo-se numa dimensao (para simplificar) sob a accao do potencial U(x), obtem-se aEquacao de Schrodinger nao-relativista:
E = K +U → ih ∂
∂ tΨ(x, t) = (− h2
2m−→∇ 2 +U(x))Ψ(x, t) (17.68)
No caso mais geral, esta equacao escreve-se na forma:
HΨ = ih∂
∂ tΨ , (17.69)
onde designamos por H o operador Hamiltoniano do sistema.
17.1.5 Metodo dos multiplicadores de Lagrange
Vamos supor que foi escolhida alguma coordenada dum sistema que nao e indepen-dente, mas que se encontra ligada por m equacoes de contrangimento do tipo:
∑k
alkdqk +altdt = 0, i = 1, ...,m (17.70)
Mostra-se que as equacoes do movimento podem ser obtidas a partir do sistema den equacoes:
6 Em ingles, “eigenvalues”.7 Representa-se um operador quantico por uma letra com um “chapeu”, por exe., L.8 Em geral, uma funcao complexa.

346 17 Lagrangianos
ddt
(∂L∂ qk
)− ∂L
∂qk= ∑
lλlalk (17.71)
e m equacoes do tipo∑k
alkdqk +altdt = 0. (17.72)
Temos assim m+n equacoes e m+n incognitas: as n coordenadas e os m λ . Os λlchamam-se os multiplicadores de Lagrange indeterminados. ∑l λlalk e a forcageneralizada de constrangimento associada a coordenada qk.
O metodo dos multiplicadores de Lagrange e usado para encontrar os valoresextremos de uma funcao de varias variaveis sujeitas a um ou mais constrangimentos.Esta tecnica permite a determinacao de um conjunto particular de pontos onde umadada funcao possui o seu valor ma´ximo ou mınimo.
Esta tecnica reduz-se ao seguinte procedimento: forma-se uma nova funcao
F(x,y,z,λ ) = f (x,y,z)−λ (g(x,y,z)− k) (17.73)
e resolve-se paraFx = 0Fy = 0Fz = 0Fλ = 0
(17.74)
Exemplo 10: Suponhamos que sao produzidos aparelhos de televisao em duasfabricas A e B e que, em particular, x televisoes sao produzidas em A e y em B.Vamos tambem supor que o custo da sua producao avaliado pelo departamento deMarketing e dado por
C(x,y) = 6x2 +12y2. (17.75)
Imagine que a sua empresa quer produzir 90 aparelhos de televisao, x na empresa Ae y na empresa B. Quais devem ser os valores de x e y de modo a que os custos deproducao sejam mınimos?
[Sol.: O objectivo e minimizar a funcao C. O constrangimento consiste em pro-duzir 90 aparelhos de televisao, x+y = 90. Portanto a funcao que procuramos min-imizar e
F(x,y,λ ) = 6x2 +12y2−λ (x+ y−90) (17.76)
Podemos obter as derivadas parciais
Fx = 12x−λ = 0Fy = 24y−λ = 0
Fλ =−x− y+90 = 0(17.77)
As solucoes das duas primeiras equacoes (que por vezes, dependendo do prob-lema podem adquirir uma grande dimensso e tendo que ser resolvidas por meiosinformaticos), sao
x = λ
12y = λ
24(17.78)

17.1 Introducao a Mecanica Lagrangiana 347
Introduzindo estas duas na ultima equacao, da-nos
Fλ =− λ
12 −λ
24 +90 = 0∴ λ = 720.
(17.79)
Podemos agora inserir o valor de λ entretanto encontrado em x e y, obtendo-se
x = λ
12 = 72012 = 60
y = λ
24 = 72024 = 30
(17.80)
Podemos agora voltar a expressao dos custos:
C(x,y) = 6x2 +12y2
C(60,30) = 6(60)2 +12(30)2
C(60,30) = 32400.(17.81)
Este valor e bem mınimo, como podemos comprovar modificando ligeiramente x ey:
C(61,29) = 6(61)2 +12(29)2
C(61,29) = 32418. (17.82)
Esta e a ideia basica sobre os multiplicadores de Lagrange, e que esta relacionadacom o metodo dos Lagrangianos.
Exemplo 11: Uma partıcula de massa m encontra-se ligada (de modo a nao poderdeslizar) ao ponto medio de uma haste de massa desprezavel de comprimento l.As extremidades da haste estao constrangidas a moverem-se ao longo do eixo dosx e y. Um campo gravitacional uniforme actua na direccao negativa de Oy. Usecoordenadas generalizadas e despreze os efeitos do atrito, Fig. 17.4.
a) Escreva o Lagrangiano e obtenha as equacoes do movimento.b) Resolva a equacao do movimento para pequenos angulos θ 1, asssumindo
que, quando t = 0, tem-se θ(t = 0) = θo e θ(t = 0) = 0.
Fig. 17.4 Partıcula de massa m colada ao meio da haste de comprimento l.
Temos os contrangimentos para a coordenada de m:
x = l2 sinθ
y = l2 cosθ
(17.83)
O Lagrangiano e´ dado por L = K−U :

348 17 Lagrangianos
K = 12 m(x2 + y2)
U = mg l2 cosθ
x = l2 cos(θ)θ
y =− l2 sin(θ)θ
∴ K = 18 ml2θ 2
L = 18 ml2θ 2−mg l
2 cos(θ)ddt
∂L∂ θ− ∂L
∂θ
∴ θ = 2gl sinθ .
(17.84)
Para θ 1, e valida a aproximacao sinθ ≈ θ e
d2θ
dt2 = 2gl θ
∴ θ = A.exp(√
2gl t)+B.exp
(−√
2gl t)
(17.85)
Considerando as condicoes iniciais θ(0) = θo e θ(0) = 0, obtem-se a solucao geral:
θ =θo
2
(exp
(√2gl
t + exp
(−√
2gl
t
))= θo cosh
(√2gl
t
). (17.86)
Exemplo 12: Esfera num aro em rotacao.Considere uma esfera de massa m deslizando sem atrito num aro em rotacao de
raio R com velocidade angular ωo num campo gravitacional g (Fig. 17.5).
Fig. 17.5 Esfera num aro em rotacao.
E conveniente escolhermos a origem das coordenadas no centro da esfera de raioR assente sobre o eixo em torno do qual roda o aro (Vd. Fig. 17.5). As coordenadasgeneralizadas sao os angulo θ medido em relacao ao eixo negativo do Oz, e φ = ωo,medido relativamente ao eixo positivo Ox. As coordenadas da esfera sao:
x(θ , t) = Rsinθ cos(φo +ωot)y(θ , t) = Rsinθ sin(φo +ωot)
z(θ , t) =−Rcosθ
(17.87)
onde φ(t) = φo +ωot e as velocidades generalizadas sao:
x(θ , θ , t) = R(θ cosθ cosφ −ωo sinθ sinφ)y(θ , θ , t) = R(θ cosθ sinφ +ωo sinθ cosφ)
z(θ , θ , t) = Rθ sinθ
(17.88)
A energia cinetica da esfera e dada entao por
K =12
mv2 =12
mR2(θ 2 +ω2o sin2
θ), (17.89)

17.1 Introducao a Mecanica Lagrangiana 349
e a sua energia potencial e:
U(θ) = mgR(1− cosθ) (17.90)
Podemos agora definir o lagrangeano
L = K−UL = 1
2 mR2(θ 2 +ω2o sin2
θ)−mgR(1− cosθ).(17.91)
A equacao de Euler-Lagrange para θ e
∂L∂ θ
= mR2θ ⇒ ddt
(∂L∂ θ
)= mR2θ
∂L∂θ
=−mgRsinθ +mR2ω2o cosθ sinθ
(17.92)
donde se obtemθ + sinθ(
gR−ω
2o cosθ) = 0. (17.93)
Exemplo 13: Maquina de Atwood Composta.Considere a maquina de Atwood ilustrada na Fig. ??. Despreze as massas das
polias a e b. Os cabos tem o comprimento fixo la e lb. Determine as velocidadesdas tres massas m1, m2 e m3, a energia cinetica do sistema, energia potencial, oLagrangiano e as equacoes de Euler-Lagrange para as coordenadas generalizadas xe y (Vd. Fig. ??).
As coordenadas das tres massas sao dadas por
x1 = x⇒ v1 = xx2 = la− x+ y⇒ v2 =−x+ y
x3 = la− x+ lb− y⇒ v3 =−x− y.(17.94)
A energia cinetica escreve-se
K =12
m1x21 +
12
m2(y− x)2 +12
m3(x+ y)2. (17.95)
A energia potencial e dada por sua vez pela expressao (considerando U=0 na linhaa tracejado superior):
U =Uo−m1gx−m2g(x+ y)−m3g(la− x+ lb− y)U =Uo−gx(m1 +m2−m3)−gy(m2−m3)−gm3(la + lb)
U ′o =Uo−gm3(la + lb) = const.= 0 ∴U =−gx(m1 +m2−m3)−gy(m2−m3)(17.96)
Obtivemos a Eq. 17.96 arbitrando U ′o = 0 e atendendo a que so nos interessavariacoes de energia potencial. O Lagrangiano do sistema e assim dado por

350 17 Lagrangianos
L = K−UL = 1
2 m1x21 +
12 m2(y− x)2 + 1
2 m3(x+ y)2 +gx(m1 +m2−m3)+gy(m2−m3)∂L∂x = g(m1−m2−m3)
∂L∂ x = (m1 +m2 +m3)x+(m3−m2)y
ddt
∂L∂ x = (m1 +m2 +m3)x+(m3−m2)y
(17.97)Daqui resulta a equacao do movimento
(m1 +m2 +m3)x+(m3−m2)y = g(m1−m2−m3) (17.98)
Repetindo o mesmo tipo de procedimento para a coordenada generalizada y (e re-pare que so ha duas, visto que m3 fica determinada por lb− y), obtemos
∂L∂y = g(m2−m3)
∂L∂ y = (m3−m2)x+(m2 +m3)y
ddt
∂L∂ y = (m3−m2)x+(m2 +m3)y
(17.99)
Inserindo na equacao de Euler-Lagrange para a coordenada generalizada y, obtem-se a segunda equacao do movimento:
(m3−m2)x+(m2 +m3)y = g(m2−m3). (17.100)
Repare que as duas equacoes estao acopladas, mas ambas evidenciam uma aceleracaoconstante de todas as massas.
Exemplo 14: A Fig. 17.6 representa um pendulo cujo ponto de suspensao semove sem atrito sobre uma linha recta; a massa do bloco onde o pendulo esta sus-penso e desprezavel em relac˜ao a m e o fio e inextensıvel (m = 1 kg, e L = 1 m).
Fig. 17.6 Pendulo com suspensao movel.
a) supondo que o movimento do bloco onde o pendulo esta suspenso e descritopor uma funcao b(t) conhecida, quantos graus de liberdade tem o sistema? Escrevao Lagrangeano e as equacoes do movimento.
O sistema move-se no plano, necessitando a partida de 2 graus de liberdade. Oponto de suspensao precisa de 1 grau de liberdade, o que fara no todo 3 graus deliberdade. Ora, ha uma ligacao da massa m com o ponto de suspensao (ligacao de-pendente do tempo). O problema fica efectivamente reduzido a 1 grau de liberdade.
x(t) = b(t)+Lsinθ
y(t) =−Lcosθ(17.101)
A derivada em ordem ao tempo e:
x(t) = b(t)+Lθ cosθ
y(t) = Lθ sinθ(17.102)

17.1 Introducao a Mecanica Lagrangiana 351
A energia cinetica e dada por
K =12
m(x2 + y2) =12
m[(b+Lθ cosθ)2 +(Lθ sinθ)2] (17.103)
donde resulta
K = 12 m[b2 +2bθLcosθ +L2θ 2 cos2 θ +L2θ 2 sin2
θ ]K = 1
2 m[b2 +2bθLcosθ +L2θ 2](17.104)
A energia potencial e dada por
U =−mgLcosθ (17.105)
Assim, o Lagrangeano e
L = K−U =12
m(b2 +2bθLcosθ +L2θ
2)+mgLcosθ . (17.106)
Repare que omitimos o termo constante da energia potencial (mgL) pois em nada vaiafectar a dinamica do problema, pois e a variacao da energia potencial que se con-verte em trabalho ou movimento. Pode-se agora escrever a Eq. de Euler-Lagrangepara a coordenada θ (o unico grau de liberdade do problema):
QuadroNegro 2

352 17 Lagrangianos
b) Supondo que b(t) = at2/2, com a = 2 m/s2 (o que significa que o ponto desuspensao move-se com aceleracao constante). Determine o ponto de equilıbrio eresolva a equacao do movimento para pequenas oscilacoes θ 1.
b(t) = 12 at2
b(t) = atb = a.
(17.107)
Substituindo na equacao obtida anteriormente, tem-se
θ +gL
sinθ =−aL
cosθ (17.108)
Para pequenas amplitudes θ 1, sinθ ≈ θ e cosθ ≈ 1:
θ +gL
θ =−aL
(17.109)
No equilıbrio, tem-se
gL θeq =− g
L ⇒ θeq =− aL =−0.204rad ∼=−12o (17.110)
A Eq. 17.109 pode ser simplificada, se medirmos agora os angulos relativamente aposicao de equilıbrio:
φ ≡ θ −θeq = θ + ag
φ = θ
⇒ φ + gL (φ −
ag ) =−
aL
∴ φ + gL φ = 0
⇒ φ(t) = A.cos(ω0t +α)⇒ θ(t) =− a
g +A.cos(ω0t +α).
(17.111)

17.2 Oscilacoes 353
“All sciences are now under the obligation to prepare the ground for the future task ofthe philosopher, which is to solve the problem of value, to determine the true hierarchy ofvalues. ”
- Friedrich Nietzsche, filosofo alemao (1844-1900)
17.2 Oscilacoes
Os fenomenos periodicos sao todos aqueles que repetem a intervalos regulares al-guma variaavel independente:
• movimento orbital dos planetas;• relogio pendular;• sistema massa-mola;• vibracoes atomicas.
O movimento oscilatorio e todo o fenomeno periodico no tempo. O movimentoondulatorio resulta de perturbacoes periodicas que se propagam no espaco (por ex.,ondas electromagneticas, ondas sonoras, ondas em lıquidos,...). Estes exemplos sug-erem que o movimento ondulatorio e o metodo natural de transmissao de energia.
E conveniente classificar os movimentos periodicos em duas categorias:
Vibracao : o objecto em movimento permanece em torno de um estado medio ou,em particular, de um estado de equilıbrio⇒ vibracao
Oscilacao : o objecto pode deslocar-se de um ponto do espaco para outro, comoacontece numa onda sonora. E um tipo de fenomeno que ocorre em sistemasfısicos, mas que tambem ocorre frequentemente em sistemas biologicos (por ex.,nos ritmos circadianos 9) e nas proprias sociedades humanas (por ex., os conflitosetnicos).
O domınio coberto por estes tipos de fenomenos e muito vasto e constitui umobjecto de estudo para o cientista e engenheiro, tendo inumeras aplicacoes tecnicas.As vibracoes podem ser um fenomeno provocado, por exemplo dedilhando as cordasde uma guitarra, ou gerando uma corrente electrica alternada. Podem tambem serum fenomeno que se procura evitar, por exemplo, as vibracoes numa viatura devidoa uma peca excentrica, os ruıdos indesejaveis do motor de uma aeronave, etc.
O movimento ondulatorio mais simples - e igualmente o mais importante nacompreensao deste tipo de fenomenos - consiste na vibracao de uma partıcula emtorno de uma posicao de equilıbrio, por exemplo, actuada pela forca elastica deHooke. Esta forca e proporcional ao deslocamento da partıcula e e “restauradora”,no sentido em que da origem a um movimento para ca e para la em torno da posicaode equilıbrio. Este tipo de vibracao, a que esta associada uma so frequencia (onda
9 Ritmo (ou ciclo) circadiano, designa em Latim “circa diem”, o que significa “cerca de um dia”.E o perıodo de aproximadamente 24 horas constituindo o ciclo biologico do corpo humano e detodos os seres vivos, influenciado pela luz solar e por fenemenos astronomicos em geral.
354 17 Lagrangianos
monocromatica), e chamado de “Movimento harmonico simples” (com frequenciaabrevia-se com as siglas MHS). No movimento mais simples, uma partıcula oscilaentre duas posicoes espaciais num perıodo indefinido de tempo sem perda de energiamecanica.
Em sistemas reais as forcas de atrito reduzem (dissipam) a energia mecanica eas oscilacoes sao atenuadas. Se uma forca externa e aplicada de tal modo que aperda de energia e equilibrada pela energia que entra no sistema, o movimento edito forcado.
Todas as oscilacoes que resultam da elasticidade da materia sao MHS, ou com-postos de MHS, como por exemplo:
• pendulo;• diapasao;• instrumento de cordas;• oscilacao dos edifıcios, pontes,...
As forcas dissipativas (atrito) estao na origem do movimento quase-periodico fazendocom que as oscilacoes decaiam com o tempo.
Uma oscilacao pode apresentar-se na forma de uma funcao periodica sim-ples, uma funcao trigonometrica seno ou co-seno. O matematico frances JosephFourier 10 mostrou que:
Teorema de Fourier: qualquer movimento finito periodico descrito por uma funcao f (t)com perıodo 2π pode ser representado como o somatorio de um numero apropriado demovimentos harmonicos simples.
Sao as series de Fourier.
f (t) =12
a0 +∞
∑n=1
(an cosnt +bn sinnt), (17.112)
onde os coeficientes de Fourier an e bn sao dados pelas formulas
an =1π
∫π
−πf (t)cosntdt, bn =
1π
∫π
−πf (t)sinntdt. (17.113)
Um princıpio basico muito importante afirma que em qualquer fenomeno periodico,deslocamentos suficientemente pequenos a partir dum ponto de equilıbrio estavelresulta em movimentos harmonico simples em torno do valor mınimo do potencial.
Comecaremos entao o estudo das oscilacoes pelo estudo do movimento harmonicosimples.
17.2.1 Movimento harmonico simples
Uma partıcula movendo-se ao longo do eixo Ox descreve MHS quando o seu deslo-camento a partir do estado de equilıbrio varia com tempo na forma geral:
10 Jean Baptiste Joseph Fourier (1768-1830).

17.2 Oscilacoes 355
x(t) = Acos(ωt +δ ), (17.114)
onde A, ω e δ sao constantes. A Fig. 17.7 apresenta o grafico dessa funcao do tipoco-seno.
Fig. 17.7 Deslocamento versus tempo para uma partıcula descrevendo o movimento harmonicosimples. A amplitude do movimento e A e o perıodo T .
A : Amplitude do movimento - e o deslocamento maximo do movimento em am-bas as direccoes;
ω : Frequencia angular do movimento (em unidades de rad/s);δ : constante de fase (ou “angulo de fase”) (quantidade adimensional).
A e δ sao determinados pelo deslocamento inicial e velocidade inicial da partıcula,em t = 0 (as chamadas condicoes iniciais). Chama-se a (ωt + δ ) a fase do movi-mento. x(t) e uma funcao perodica que se repete quando ωt aumenta de 2π . Por-tanto, um processo estritamente periodico satisfaz a relacao:
F(t) = F(t +T ). (17.115)
O perıodo T e o tempo necessario para a partıcula descrever um ciclo completo doseu movimento:
ωt +δ +2π = ω(t +T )+δ
T = 2π
ω(s)
f = ν = 1T = ω
2π(Hz)
ω = 2π f = 2π
T (s−1)
(17.116)
A velocidade de uma partıcula sujeita ao MHS e dada por:
v =dxdt
=−ωAsin(ωt +δ ), (17.117)
e a aceleracao da partıcula e dada por:
a = dvdt =−ω2Acos(ωt +δ )
a =−ω2x(t).(17.118)
Os valores extremos de v sao ±ωA.Os valores extremos de a sao ±ω2A.
vmax = ωAamax = ω2A
(17.119)
Seja x = Acos(ωt +δ ). A amplitude A e a constante de fase δ devem ser apropri-adamente escolhidas de modo a verificarem as condicoes iniciais do movimento.
Suponha assim que essas condicoes iniciais em t = 0 sao x = xo e v = vo. Obtem-se:

356 17 Lagrangianos
Fig. 17.8 Representacao grafica do movimento harmonico simples: a) deslocamento versus tempo;b) velocidade versus tempo, c) aceleracao versus tempo. Repare que a velocidade encontra-se90o fora de fase com o deslocamento e a aceleracao esta 180o fora (em oposicao) de fase com odeslocamento.
x = Acos(ωt +δ )⇒ xo = Acosδ
v =−ωAsin(ωt +δ )⇒ vo =−ωAsinδ
∴ tanδ =− voωxo
(17.120)
E facil verificar que:
x2o +( vo
ω)2 = A2 cos2 δ +A2 sin2
δ = A2
∴ A =√
x2o +( vo
ω)2.
(17.121)
17.2.2 Propriedades do MHS
O estudo anterior permite-nos concluir o seguinte:
1. O deslocamento, a velocidade e a aceleracao variam sinusoidalmente com otempo, mas nao estao em fase;
2. A aceleracao da partıcula e proporcional ao deslocamento, mas dirigem-se emsentidos opostos;
3. A frequencia e o perıodo do movimento sao independentes da amplitude.
Se x(t) representa o movimento da partıcula de massa m, entao:
F = ma(t)=−mω2x
(17.122)
17.2.3 Sistema massa-mola
Considere um sistema constituıdo por uma massa m ligada a uma mola com con-stante elastica k e movendo-se numa superfıcie horizontal sem atrito (Fig. 17.9).
Se a mola estiver esticada de uma quantidade x a partir da sua posicao deequilıbrio, a massa e actuada por uma forca restauradora linear proporcional aodeslocamento (lei de Hooke) e sempre dirigida para o ponto de equilıbrio, oposta aodeslocamento:
F(x) =−kx. (17.123)
Sob a accao desta forca, a equacao do movimento de m e imediatamente obtida:
md2xdt2 =−kx, (17.124)

17.2 Oscilacoes 357
ou ainda, numa forma mais conveniente,
d2xdt2 +
km
x = 0. (17.125)
Seja ω2 = k/m. A equacao do movimento pode-se assim escrever na forma usual:
d2xdt2 +ω
2x = 0. (17.126)
Fig. 17.9 Sistema massa-mola
Vamos agora assumir uma solucao da forma:
x = Acos(ωt +δ )
v = dxdt =−ωAsin(ωt +δ )
a = d2xdt2 =−ω2Acos(ωt +δ ) =−ω2x
(17.127)
Verificamos logo que a solucao proposta verifica de facto a equacao diferencial desegunda ordem ( d2x
dt2 +ω2x = 0), onde
ω =√
km
T = 2π
ω= 2π
√mk
f = 1T = 1
2π
√km .
(17.128)
Note que a solucao matematica da Eq. 17.200 pode ser escrita na forma assinal-ada, ou nas duas seguinte formas equivalentes:
x(t) = Asin(ωt +δ )x(t) = Acosωt +Bsinωt. (17.129)
Podemos em seguida considerar alguns casos particulares.
17.2.3.1 Caso particular I:
A massa m e colocada na posicao A, distante de A da posicao de equilıbrio e libertadaa partir daı, dessa posicao em que a mola se encontra esticada (Fig. 17.10):

358 17 Lagrangianos
x(t = 0) = Av(t = 0) = 0
∴ x(t) = Acosωtv = dx
dt =−ωAsinωta = d2x
dt2 =−ω2Acosωt
(17.130)
A Fig. 17.11 mostra os graficos respectivos afectos a esse movimento.
Fig. 17.10 Sistema massa-mola que parte do repouso em xo = A. Neste caso δ = 0 e x = Acosωt.
Fig. 17.11 Deslocamento, velocidade e aceleracao versus tempo para uma partıcula submetida aum MHS, sob as condicoes iniciais, xo(t = 0) = A e vo(t = 0) = 0.
17.2.3.2 Caso particular II:
A massa m parte da posicao relaxada movendo-se para a direita com velocidadeinicial vo (Fig. 17.12).
x(t = 0) = 0 (a)v(t = 0) = vo (b)0 = Acos(δ ) (c)
vo =−ωAsin(δ ) (d)
(17.131)
Fig. 17.12 Sistema massa-mola comeca o seu movimento da posicao de equilıbrio, xo(t = 0) = 0.Se a velocidade inicial e vo para a direita, entao x = vo
ωsinωt.
Da Eq. 17.131-(c), obtem-se: δ =±π
2Da Eq. 17.131-(d), concluımos que a escolha acertada e: δ =−π
2 e A = vo/ω .
∴ x = voω
cos(ωt− π
2
)x = vo
ωsinωt. (17.132)
e, da mesma forma obtemos ainda:
v = vo cosωta =−ωvo sinωt (17.133)

17.2 Oscilacoes 359
17.2.4 Energia no movimento harmonico simples
Vamos agora calcular os valores instantaneos da energia cinetica e potencial, assimcomo os seus valores medios.
Supondo que nao ha atrito, a energia mecanica total conserva-se:
K =12
mv2 =12
mω2A2 sin2(ωt +δ ). (17.134)
A energia potencial elastica armazenada na mola para qualquer posicao x e
U =12
kx2 =12
mA2 cos2(ωt +δ ). (17.135)
Usando ω2 = k/m, a energia total e dada por
E = K +U =12
kA2[sin2(ωt +δ )+ cos2(ωt +δ )]. (17.136)
Obtemos finalmente a expressao geral da energia do movimento harmonico simples:
E =12
kA2. (17.137)
A energia do MHS e uma constante do movimento e e proporcional ao quadradoda amplitude do movimento. A Fig. 17.13 mostra K e U em funcao do tempo e daamplitude.
Na sequencia do curso necessitamos de introduzir o conceito de media temporalde uma dada funcao f (t):
〈 f (t)〉 ≡ 1T
∫ T
0f (t)dt. (17.138)
A media temporal de sin2(ωt +δ ) ou de cos2(ωt +δ ), tem o valor de 1/2 paracada um dos integrais temporais:
〈cos2(ωt +δ )〉 ≡ 1T
∫ T
0cos2(ωt +δ )dt =
12, (17.139)
ou
〈sin2(ωt +δ )〉 ≡ 1T
∫ T
0sin2(ωt +δ )dt =
12. (17.140)
Fig. 17.13 (a) Energia cinetica e energia potencial versus tempo para o caso do movimentoharmonico simples com δ = 0; (b) K e U versus deslocamento. Verifica-se sempre E = K +U =Const.

360 17 Lagrangianos
A Fig. 17.14 resume as definicoes e equacoes do movimento harmonico simples(MHS).
Fig. 17.14 Definicoes e equacoes do movimento harmonico simples (MHS).
Como a energia mecanica total e E = K +U , verificamos tambem que
E = K +U = 12 mv2 + 1
2 kx2 = 12 kA2
v =±√
km (A
2− x2).(17.141)
Fig. 17.15 Movimento harmonico simples do sistema massa-mola e a sua analogia com o pendulosimples. Os parametros na Tabela a direita referem-se ao sistema massa-mola, assumindo-se quex(t = 0) = A, donde x = Acosωt.
A energia cinetica instantanea e o seu valor medio sao dados por
K = 12 mx2 = 1
2 m[ωAcos(ωt +δ )]2
< K >=∫ T
0 K(t)dtT = 1
2 mω2A2∫ 2π/ω
0 cos2(ωt+δ )2πω
.(17.142)
Como calculamos o valor do integral sobre um perıodo completo, o valor da fase eirrelevante e podemos por δ = 0:
< K >= 12 mω2A2 ω
2π
∫ 2π/ω
012 (1+ cos(2ωt))dt
= 12 mω2A2 ω
2π( 2π
ω+∫ 2π/ω
0 cos(2ωt)dt)= 1
2 mω2A2[ 12 +
12ω
(sin4π− sin0)]< K >= 1
4 mω2A2.
(17.143)
Aplicando o mesmo tipo de procedimento a energia potencial, obtemos o valormedio da energia potencial:
<U >=14
mω2A2. (17.144)
Assim, concluımos que:< K >=<U > . (17.145)
Isto e, a energia cinetica media iguala a energia potencial media, sendo que a energiamecanica total permancece constante e assumindo o seguinte valor:
E =< K >+<U >=< E >=12
mω2A2. (17.146)
Exemplo 1: Sistema massa-mola horizontal, sem atrito.

17.2 Oscilacoes 361
m = 0.50 kg, F = 7.5 N e a forca exercida quando a mola e esticada 3.0 cm apartir da sua posicao de repouso.
a) Qual e a constante elastica da mola?
k =−F
x=
7.5N0.03
= 250N/m. (17.147)
b) Qual e a frequencia angular de vibracao do sistema?
ω =√
km =
√2500.5 = 22.36rad/s
ν = ω
2π= 3.56Hz
T = 1ν= 0.281s.
(17.148)
Suponha que no instante inicial t = 0 o sistema massa-mola e comprimido 5.0cm e depois liberto.
c) Qual e a equacao do movimento, o valor maximo de v(t) e a(t)?
QuadroNegro 1
362 17 Lagrangianos
Exemplo 2: Sistema massa-mola no campo gravıtico (Fig. 17.16).
Fig. 17.16 Sistema massa-mola no campo gravıtico.
A equacao do movimento e dada por
m d2xdt2 = ∑Fy =−ky+mg
=−k(y− mgk )
(17.149)
Quando a mola esta em repouso, em equilıbrio com a massa suspensa, a aceleracaoe nula:
∑Fy = 0 =−kyo +mg⇒ yo =mgk, (17.150)
sendo yo = mg/k o ponto de equilıbrio da massa medido no eixo vertical. Podemostirar partido deste facto de modo a fazer uma apropriada mudanca de variavel quesimplifica a equacao do movimento oscilatorio para a forma usual:
ξ = y− mgk
m d2ξ
dt2 = m d2ydt2 =−kξ
ξ = Acos(ωt +δ )y(t) = ξ + mg
ky(t) = Acos(ωt +δ )+ mg
k .
(17.151)
Como vemos, obtemos o MHS com o deslocamento y medido a partir da posicaode equilıbrio quando a mola esta esticada da quantidade d = mg/k (Fig. ??). Afrequencia das oscilacoes e igual a que foi encontrada no problema anterior.
Exemplo 3: Massa entre duas molas em movimento horizontal (Fig. 17.17).
Fig. 17.17 Massa entre duas molas no plano horizontal.
QuadroNegro 2

17.2 Oscilacoes 363
17.2.5 Circuito LC e o papel das analogias em Fısica
Nas oscilacoes a variavel x representa um deslocamento. Vamos em seguida mostrarque noutros sistemas fısicos, usando outras grandezas fısicas, poderemos obterequacoes matematicamente equivalentes. Podemos estabelecer analogias entre difer-entes tipos de fenomenos estabelecendo uma correspondencia biunıvoca entre asdiferentes variaveis.
Apresentamos na Tabela 17.1 as analogias entre grandezas fısicas electromagnecticase mecanicas.
Exemplo 4: A equacao do sistema massa-mola:
md2xdt2 + kx = 0 (17.152)
corresponde a equacao analoga do circuito electrico LC:
Ld2qdt2 +
1C
q = 0, (17.153)
donde concluımos com base nesta analogia que os perıodos respectivos de oscilacaosao dados por
T = 2π√
LC; T = 2π√m
k (17.154)
Exemplo 5: De modo semelhante podemos inferir da equacao do osciladorharmonico com atrito a equacao matematicamente analoga:
Ld2qdt2 +R
dqdt
+qC
= 0 (17.155)
e, no caso de o sistema electrico se encontrar sob a accao de oscilacoes sinusoidaisforcadas com a diferenca de potencial electrica (ou tensao) de pulsacao ω:
Ld2qdt2 +R
dqdt
+qC
=V cos(ωt). (17.156)
Vejamos o circuito LC ilustrado na Fig. 17.18. Sabemos que a tensao nos polosda bobina e dada pela expressao
VL = Ldidt
(17.157)
e a tensao electrica nos polos do condensador e dada por
VC =QC
=1C
∫i(t)dt (17.158)
Segundo a Primeira Lei de Kirchoff (lei das malhas) 11:
11 Esta materia sera estudada em Electromagnetismo e Optica no 2o ano.

364 17 Lagrangianos
V −VL−VC = 0. (17.159)
A lei das malhas diz-nos que num circuito fechado a soma algebrica de todas astensoes num circuito qualquer fechado e igual a zero. Portanto, temos a seguinteequacao:
−Ldidt− 1
C
∫idt =−V, (17.160)
ou entao, servindo-nos da expressao Q =−∫
idt:
Ld2Qdt2 +
1C
Q =−V (17.161)
Por analogia com o problema do sistema massa-mola podemos desde ja adivinharque a solucao sera do tipo
i(t) = io sinωt (17.162)
onde ω =√
1LC . Podemos assim determinar a diferenca de potencial nos terminais
da inductancia (bobina) e do condensador:
VL =−Li =−Lωio cosωt =−√
LC i
VC =− 1C∫
i(t)dt = 1C
ioω
cosωt = 1ωC i =
√LC i.
(17.163)
Em particular, verificamos que as amplitudes sao iguais, mas de sinais contrarios.
Fig. 17.18 Circuito oscilante LC.
E importante referir que os sistemas mecanicos podem ser representados e estu-dados pelos seus circuitos electricos equivalentes, daqui a importancia das analo-gias. Torna-se mais facil e economico construir um pequeno circuito electricoequivalente do que construir o modelo do sistema mecanico correspondente. NaTabela 17.1 mostramos as analogias referidas.
Exemplo 6: Determine o lagrangeano e o hamiltoniano de um pendulo movendo-se na vertical com massa m e comprimento L.
As energias cinetica e potencial sao dadas por:
K = 12 mv2 = 1
2 mL2θ 2
U =−MgLcosθ(17.164)
Donde se pode escrever o lagrangiano:
L = T −U =12
mL2θ
2 +mgLcosθ (17.165)
Por sua vez, o hamiltoniano e:

17.2 Oscilacoes 365
Table 17.1 Analogias mecanicas-electricas
Sistema mecanico Sistema electricoSegunda Lei de Newton Primeira Lei de Kirchoff
Grau de liberdade (x, θ ,...) Circuito (Q,...)Forca aplicada Interruptor fechado
Forca V - voltagemMassa Inductancia (Henry)
x - deslocamento q - carga (C)x - velocidade i - corrente do circuito (A)
h - amortecimento R - resistencia (Ω )k - constante elastica da mola 1
C - capacitancia (1/F)
H = pq−LH = E = θ
∂L∂ θ−L (17.166)
O momento conjugado e dado por:
p =∂L∂ θ
= mL2θ . (17.167)
e daqui resulta a expressao completa do hamiltoniano
H = mL2θ
2− 12
mL2θ
2−mgLcosθ =12
mL2θ
2−mgLcosθ . (17.168)
As equacoes do movimento obtem-se a partir da sucessao calculatoria:
ddt
∂L∂ θ− ∂L
θ= 0
∂L∂θ
=−mgLsinθ
∂L∂ θ
= mL2θ
ddt
∂L∂ θ
= mL2θ
∴ ML2θ +mgLsinθ = 0θ + g
L sinθ = 0.
(17.169)
Como se obtem o momento conjugado, p?Repare que L = pq−H, onde q e a velocidade generalizada.
∂L∂ q = p− ∂H
∂q∂q∂ q + q ∂ p
∂ q = p+(q− ∂H∂ p )
∂ p∂ q
∴ p = ∂L∂ q
(17.170)
onde usamos a segunda equacao de Hamilton, q = ∂H/∂ p.

366 17 Lagrangianos
17.2.6 Pendulo simples
Resolvemos na Seccao precedente o problema do pendulo simples aplicando ometodo dos lagrangianos. Iremos agora obter a solucao do movimento usando aequacao fundamental do movimento rotacional e aplicando o metodo da energiamecanica total.
17.2.6.1 Metodo do torque
Considere uma massa pontual m suspensa num ponto O de um fio de massa de-sprezavel e comprimento L. O movimento ocorre no plano vertical alimentado pelaforca gravıtica (Fig. 17.19).
As forcas actuantes sobre a massa m sao a tensao da corda−→T e o peso m−→g . A
componente tangencial de m−→g constitui uma forca restauradora, sempre agindo nadireccao da vertical em θ = 0. Podemos escrever as equacoes seguintes:
Ft =−mgsinθ = m d2sdt2
s = Lθ
v = L dθ
dtτ = Ioα =−FL =−mgLsinθ
mL2θ =−mgLsinθ
d2θ
dt2 + gL sinθ = 0.
(17.171)
Para pequenos angulos θ 1, (θ em radianos):
sinθ ≈ θ − θ 3
3!+ ..., (17.172)
e a equacao do movimento toma a forma simplificada
d2θ
dt2 +gL
θ ' 0. (17.173)
A solucao geral desta equacao apresenta-se na seguinte forma:
θ = θo cos(ωt +δ ), (17.174)
onde a frequencia angular e determinada pela equacao:
ω =
√gL. (17.175)
Basta substituir a Eq. 17.174 na Eq. 17.173 para confirmarmos que essa e de factouma solucao possıvel.

17.2 Oscilacoes 367
Fig. 17.19 Quando θ e pequeno, o pendulo simples tem um movimento harmonico simples emtorno do equilıbrio (θ = 0). A forca restauradora e a componente tangencial ao cırculo, mgsinθ .
Concluimos de imediato que, na aproximacao das pequenas amplitudes angu-lares, o perıodo ou a frequencia natural do pendulo simples depende apenas docomprimento do fio e da aceleracao da gravidade.
Podemos alternativamente resolver o mesmo problema por um metodo diferente,usando a nocao de torque. Se o eixo vertical for Oz e para a direita orientarmos oeixo Oy, podemos fazer o calculo anterior usando os vectores com todo o cuidado:
−→r = L−→u r = Lsinθ−→j −Lcosθ
−→k .
−→τ = [−→r ×−→F ].
(17.176)
A fim de calcularmos −→τ , podemos usar a notacao matricial:
−→τ = [−→r ×−→F ] =
−→i −→j
−→k
0 Lsinθ −Lcosθ
0 0 −mg
(17.177)
−→τ =−→i (−mgLsinθ) (17.178)
Ora, o momento angular−→L o em relacao ao eixo que passa por O e dado por:
−→L o = [−→r ×−→p ] =
−→i −→j
−→k
0 Lsinθ −Lcosθ
0 mLθ cosθ mLθ sinθ
(17.179)
−→L o =
−→i (mL2
θ sin2θ +mL2
θ cos2θ) =
−→i L2
θm. (17.180)
Recorrendo agora a lei fundamental da dinamica rotacional, obtemos a equacaodo movimento harmonico simples (MHS):
d−→L
dt =−→τ−mgLsinθ = mL2θ
∴ θ + gL sinθ = 0.
(17.181)
17.2.6.2 Metodo da energia mecanica total
Por ultimo, poderıamos resolver o mesmo problema classico da mecanica atravesdo metodo mais sofisticado da energia mecanica total. Trata-se em primeiro lugarde obter as expressoes da energia potencial e energia cinetica, somando ambas aspartes no termo de energia mecanica total, E. Resolvemos a equacao da energia emordem a θ :

368 17 Lagrangianos
U(h) = mgL(1− cosθ)K = 1
2 mv2 = 12 mL2θ 2
E = H = K +U = 12 mL2θ 2 +mgL(1− cosθ)
cosθ ' 1− θ 2
2 + ...E = 1
2 mL2θ 2 + 12 mgLθ 2
∴ dθ
dt =√
2E−mgLθ 2
ml2 =√
gL
√2E
mgL −θ 2
(17.182)
A amplitude maxima do movimento de oscilacao e θo, sendo os pontos de retorno θoe −θo. Nesses pontos o pendulo esta momentaneamente em repouso, isto e, θ = 0.
E = 12 mgLθ 2
o ⇒ θo =2E
mgLdθ
dt =√
gL
√θ 2
o −θ
dθ√θ 2
o−θ 2=√
gL dt∫
θ
θ1dθ√
θ 2o−θ 2
=√
gL∫ t
0 dt
∴ arcsin(
θ
θo
)− arcsin
(θ1θo
)=√
gL t
⇒ θ
θo= sin
[√gL t + arcsin θ1
θo
]∴ θ = θo sin(ωt +δ ).
(17.183)
Nesta ultima equacao estao identificadas a pulsacao angular ω e a fase δ :
ω =√
gL ;δ = arcsin
(θ1θo
). (17.184)
As tres quantidades θo, θ1 e δ sao importantes e o seu significado e o seguinte:
1. θo e a amplitude maxima da oscilacao;2. θ1 e o angulo de onde partiu o movimento em t = 0;3. δ e uma constante do movimento. As condicoes iniciais determinam δ .
Fig. 17.20 Energia potencial versus amplitude.
17.2.7 Solucao exacta do problema do pendulo simples
Como ja vimos, a energia do pendulo simples e dada pela expressao:
E =12
mL2θ
2 +mgL(1− cosθ). (17.185)

17.2 Oscilacoes 369
Esta pode ser reescrita numa forma mais conveniente por forma a construirmos astrajectorias de fase do sistema dado no espaco de fase:
θ 2 = 2mL2 [E−mgL(1− cosθ)]
θ 2 = 2EmL2 − 2g
L + 2gL cosθ =C+2ω2
o cosθ .(17.186)
Aqui a constante C do sistema define-se pela expressao:
C ≡(
2EmL2 − 2g
L
);ω2
o ≡gL . (17.187)
Suponhamos que se deixa cair o pendulo inicialmente em repouso da posicao−π <θo < π . Desprezando o efeito do atrito, esperamos que para pequenos movimentosθ = 0 quando θ =±θo. Se comunicarmos um grande impulso a massa m, o pendulodara uma volta completa (ou mais voltas) e θ(t) continuara a aumentar sem que θ
se anule em nenhum ponto.Com efeito, a expressao anterior permite construir as trajectorias de fase do sis-
tema dado e tracar sobre o espaco de fase 12 um retrato geral do sistema, como estailustrado no QuadroNegro 3.
QuadroNegro 3
Dois tipos de trajectorias de fase correspondem a dois tipos de movimento.Podemos depreender o seguinte da Figura tracada no QuadroNegro 3:
• Se E = 0, entao C =−2ω2o e o pendulo fica em repouso no ponto (θ = 0,θ = 0);
• Em θ = 2π , repete-se situacao identica nas coordenadas do tipo θ = 0 e θ = 2nπ
(n =±1,±2, ...) correspondendo aos pontos singulares do tipo “centro”. As tra-jectorias fechadas em torno deste ponto representam pequenos movimentos pen-dulares em torno da posicao de equilıbrio inferior estavel onde a energia potenciale mınima.
12 Neste problema a 1 dimensao, trata-se de um espaco abstracto de dimensao N=2, (θ ,θ).

370 17 Lagrangianos
• Os pontos singulares θ e θ = (2n−1)π , do tipo “colo” correspondem a posicaode equilıbrio superior, onde a energia potencial atinge o seu valor maximo.
• Os curvas limite correspondem a E = 2mgL.
Repare que a energia E nao pode ser negativa e temos que
C ≥−2ω2o , (17.188)
que correspondem as duas situacoes extremas
θ 2 =C+2ω2o > 0
θ 2 =C−2ω2o < 0.
(17.189)
As curvas fechadas correspondem aos valores de C para os quais se verifica
−2ω2o <C < 2ω
2o ⇒ E ≤ 2mgL. (17.190)
Calculemos o perıodo da oscilacao. A amplitude maxima e obtida quando θ = 0:
⇒ cosθo =−C
2ω2o
(17.191)
E claro que o perıodo e 4 vezes o tempo necessario para ir de θ = 0 a θ = θo:
dθ
dt =√
2ω2o cosθ +C
∴ T = 4∫
θo0
dθ√2ω2
o cosθ+C= 4√
2ω2o
∫θo0
dθ√cosθ−cosθo
. (17.192)
Transformemos este integral, introduzindo a nova variavel ψ:
sinψ ≡ sinθ/2sinθo/2
∴ T = 4ωo
∫ π/20
dψ√1−sin2( θo
2 sin2 ψ)≡ 2π
ω.
(17.193)
Mostra-se que
ω ' ωo(1−1
16θ
2o + ...) (17.194)
Concluımos que, quando a amplitude e grande, a frequencia do pendulo depende daamplitude: as oscilacoes do sistema sao nao isocronas 13.
Exemplo 7: Pendulo fısico.Qualquer corpo rıgido suspenso de um eixo fixo que nao passa pelo seu CM
oscilara sempre que for deslocado da sua posicao de equilıbrio. Suponhamos quese coloca um “pivot” a uma distancia d do CM de um corpo, tal como se encontrailustrado na Fig. 17.21.
O torque fornecido pelo campo gravıtico e dado por
13 As oscilacoes sao isocronas quando nao dependem da amplitude e, portanto, o seu perıodo econstante. Um relogio de pendulo ou um relogio de pulso de corda que funcione neste princıpiotem uma taxa temporal constante, independemente se se da mais ou menos corda ao relogio.

17.2 Oscilacoes 371
Fig. 17.21 O pendulo fısico consiste num corpo rıgido que pode rodar em torno de um “pivot”colocado num ponto O, distinto do CM. No equilıbrio, o peso passa por O, situacao que corre-sponde a θ = 0. O torque resultante em torno de O quando o sistema e deslocado de um angulo θ
e mgd sinθ .
τ = Iα
−mgd sinθ = I d2θ
dt2d2θ
dt2 + mgdI θ = 0(θ 1)
θ = θo cos(ωt +δ )
(17.195)
ondeω =
√mgd
I ⇒ T = 2π
ω= 2π
√I
mgd . (17.196)
Curiosamente, concluımos que um pendulo ideal de comprimento
L =I
md(17.197)
teria a mesma frequencia de oscilacao do pendulo fısico.Vemos assim que o pendulo fısico suspenso no ponto O oscila como se fosse um
pendulo ideal, com toda a sua massa concentrada num ponto O′ a distancia L de Oe localizado ao longo da linha que passa pelo CM no ponto C (Fig. 17.22).
Fig. 17.22 Pendulo ideal equivalente ao pendulo fısico se L = I/md.
O ponto O′ e chamado de centro das oscilacoes do pendulo. O e O′ sao pontosconjugados 14. Considere as oscilacoes em torno de O′ (com d = OC):
T ′ = 2π
√I′O′
mg(L−d)
L−d = Imd −d = I−md2
md = Icmd
IO = Ic +md2
I′O′ = Ic +m(L−d)2.
(17.198)
Substituindo em T ′:
T ′ = 2π
√I′o′
mg(L−d) = 2π
√Ic+m(L−d)2
mg(L−d)
T ′ = 2π
√Ic+m( Ic
md )2
mg( Icm d)
T ′ = 2π
√md2+Ic
mgd = 2π
√Io
mgd
∴ T ′ = T
(17.199)
14 Isto e, pontos que podem ser unidos por uma linha recta.

372 17 Lagrangianos
Definiu-se o momento de inercia em torno do ponto O por Io = Ic + md2. Con-cluımos que, nas referidas condicoes, os perıodos sao efectivamente iguais.
Exemplo 8: Considere o bastao apresentado na Fig. 17.23.
Fig. 17.23 Bastao pendular.
Aplicacao numerica: m = 0.910 kg, TA = 1.5 s, d = 45.8 cm.
L = Imd
TA = 2π
√I
mgd = 2π
√Lg
ω2 = gL ⇒ L = g
ω2 ⇒ L = ( TA2π)2g = ( 1.5
2π)2×9.8 = 55.9cm
(17.200)
Portanto, o pendulo tera o mesmo perıodo, seja oscilando suspenso em A ou sus-penso em B, TA = TB, pois os dois pontos A e B sao pontos conjugados. Isto e,invertendo o pendulo e colocando-o a oscilar em torno do ponto B ele tera o mesmoperıodo que tinha quando posto a oscilar em torno de A. Esta e uma propriedadeespecial importante.
Exemplo 9: Pendulo de torsao.Um corpo rıgido esta suspenso por um fio ligado ao topo de um suporte fixo. O
fio e um objecto elastico flexıvel que armazena energia mecanica. Quando o corpoe torcido de um pequeno angulo θ (abaixo do limiar elastico), o fio torcido exerceum torque restaurador proporcional ao deslocamento angular:
τ =−kθ . (17.201)
k e a constante de torsao do fio com unidades em N.m/rad.
d2θ
dt2 + kI θ = 0
ω =√
kI ⇒ T = 2π
ω= 2π
√Ik
(17.202)
Fig. 17.24 Um pendulo de torsao consiste num corpo rıgido suspenso por um fio ligado a umsuporte rıgido. O corpo oscila em torno da linha OP com amplitude θo.
Ha varios sistema oscilantes deste tipo: roda do balanco do relogio, galvanometros,balanca de torsao de Cavendish, barras de torsao que suportam as componentes desuspensao dos automoveis.
Exemplo 10: Pendulo de comprimento variavel.Consideremos um pendulo simples cujo comprimento e funcao do tempo: L =
Lo + vt. O teorema fundamental da dinamica rotacional da-nos:

17.2 Oscilacoes 373
ddt (L
2θ) =−gLsinθ
∴ Lθ +2vθ +gsinθ = 0.(17.203)
No limite das pequenas oscilacoes, obtem-se a equacao aproximada:
Ld2θ
dL2 +2dθ
dL+
gv2 θ = 0. (17.204)
Fazendo a seguinte mudanca de variaveis:
L = v2
4g x2; θ = Zx . (17.205)
obtemos a seguinte equacao de Bessel:
d2Zdt2 +
1x
dZdx
+Z(
1− 1x2
)= 0. (17.206)
O integral geral da equacao e
Z1 = AJ1(x)+BN1(x) (17.207)
onde J1 e N1 sao respectivamente as funcoes de Bessel e de Neumann de ordem um.Pode-se verificar que
dZ1
dx= Zo(x)−
Z1(x)x
(17.208)
Z0 deduz-se da Eq. 17.208 substituindo o ındice 1 por 0. Conhecendo os angulosem duas posicoes diferentes, θo e θ ′o pode-se calular A e B. Em particular, se θ ′o = 0,pode-se usar a identidade matematica:
N0J1−N1J0 =2
πx, (17.209)
obtendo-seA = π
2 θoxo(xoNo(xo)−N1(xo))B = π
2 θoxo(J1(xo)− xoJo(xo)).(17.210)
Suponhamos que a velocidade v e muito pequena face a velocidade adquirida porum corpo em queda de uma altura 2l, isto e, 2
√gL. Neste caso, x 1 e podemos
usar as formulas asimptoticas, que se podem encontrar em Tabelas:
J0 = ρ cosφ , N0 = ρ sinφ , J1 = ρ sinφ ,
N1 =−ρ cosφ , ρ =√
2πx , φ = x− π
4(17.211)
Assim, temos

374 17 Lagrangianos
θ = Zx
θ = π
2 θoxo[xoρ sinφ +ρ cosφ ]ρ sinφ − π
2 θoxo[ρ sinφ − xoρ cosφ ]ρ cosφ
θ = θoxo√
xox√
x cos(xo− x)
x = 2v
√g(Lo + vt).
(17.212)As oscilacoes tem amplitude instantanea θo
3√ xo
x , e aumenta ou diminui quandov < 0 e v > 0, respectivamente. Este tipo de movimento ocorre quando se tem umobjecto suspenso num cabo, por exemplo, com o fito de transportar para a superfıcieos detritos de uma mina.
17.2.8 Percussao
Considere um corpo suspenso de um ponto O (Fig. 17.25). Suponha que num dadoinstante este corpo recebe um impulso aplicado em O′ situado abaixo do CM:
−→I = ∆(m−→v c) =
∫ −→F dt. (17.213)
A velocidade resultante do CM e
−→v c =
−→Im
(17.214)
O impulso comunica velocidade angular ao corpo que tende a rodar em torno doCM:
ω =Ir′cIc
(17.215)
pois que∆L = ∆(Icω) = τdt = Ir′c. (17.216)
Em resultado do impacto, o corpo adquire um movimento de translaccao e rotacaoem torno do CM. Se a forca de impacto
−→F fosse aplicada no CM, o corpo teria
movimento de translacao para a direita, no sentido de−→F , sem rodar em torno do
ponto “pivot” O.
Fig. 17.25 Movimento do pendulo fısico imediatamente apos receber um impulso I em O′, centrodas oscilacoes quando esta suspenso do ponto O.
Se a forca de impacto for aplicada abaixo do CM mas acima do ponto de per-cussao, o corpo tendera a rodar em torno do seu CM no sentido oposto ao da forcaaplicada e, ao mesmo tempo, adquire um movimento de translaccao no sentido de−→F . O ponto O sera submetido a uma forca impulsiva. No caso de um jogador debaseball, ao bater a bola neste ponto sentira um forca impulsiva nas suas maos. Se

17.2 Oscilacoes 375
aplicar a forca de impacto abaixo do centro de percussao, a forca impulsiva aindasera maior.
Porem, se a forca de impacto actuar no centro de percussao, a aceleracao detranslaccao compensa exactamente a aceleracao de rotacao no sentido oposto. Comoveremos em seguida, a velocidade do ponto pivot O sera nula. O jogador de base-ball nao sentira qualquer reaccao de impacto no caso de bater a bola neste pontoexactamente.
A velocidade linear−→v em qualquer ponto do corpo e a soma vectorial de−→v c e davelocidade tangencial −→v ′ em torno do CM devido a rotacao. Em O′ as velocidades−→v ′ e −→v c somam-se. Em O as velocidades opoem-se:
vo = vc− v′ = vc−ωrc =Im−ωrc =
Im
(1− mrcr′c
Ic
)(17.217)
Masrcr′c =
Icm ⇒ vc = ωrc∴ vo = 0.
(17.218)
Assim, verificamos algo surpreendentemente que os objectos quando percutidos noponto certo (a distancia r′c do CM) rodam em torno do eixo que passa por O. Ocentro de oscilacao tambem se chama centro de percussao.
Exemplo 11: Poco de potencial.Uma partıcula esferica de massa m rola em torno do mınimo de potencial de uma
superfıcie curva de raio R. A esfera tem raio r (Fig. 17.26).Assuma θ 1, de modo que x∼ Rθ , e
U(θ) = mgR(1− cosθ)U(θ)' 1
2 mgRθ 2.(17.219)
Temos pela escolha apropriada da origem do potencial U(θ = 0) = 0. Seja θ = θoa amplitude maxima do deslocamento.
Fig. 17.26 Partıcula esferica de raio r oscilando num poco de potencial.
- Poco de potencial.QuadroNegro 4


Chapter 18Oscilacoes
“Everyone has been made for some particular work, and the desire for that work has beenput in every heart.”
- Rumi, poeta afegao (1207-1273)
“Advance, and never halt, for advancing is perfection. Advance and do not fear the thornsin the path, for they draw only corrupt blood.”
- Kahlil Gibran (1883-1931), grande poeta Libanes.
18.1 Oscilacoes amortecidas
Na ausencia de atritos a amplitude da oscilacao e constante no tempo. Porem,na pratica, observamos que as oscilacoes reais param ao fim de certo tempo, saoamortecidas devido a accao de forcas de atrito associadas a fenomenos irreversıveisque dissipam a cada oscilacao uma fraccao da energia do oscilador para a transfor-mar, por exemplo, em calor. Este e o caso do atrito entre dois solidos presente emmecanismos tais como eixos, parafusos, ...
Apesar da forca de atrito entre pecas solidas se encontrar presente em todas asarticulacoes mecanicas, o tipo de forca que se manifesta numa grande variedadede sistemas mecanicos e a forca de atrito do tipo fluido viscoso que aje no sentidocontrario a velocidade (Fig. 18.1):
−→F =−b−→v , (18.1)
onde b e uma constante positiva que depende das propriedades do fluido e geometriado objecto. A equacao do movimento e dada por
m−→a = m d2xdt2 = ∑i
−→F ext
i
m d2xdt2 =−kx−bv.
(18.2)
377

378 18 Oscilacoes
Fig. 18.1 Sistema massa-mola com amortecimento.
A equacao caracterıstica da Eq. 18.2 e
α2 +2λα +ω
2o = 0, (18.3)
onde 2λ = bm e ω2
o = km . O seu descriminante reduzido e:
∆ = λ2−ω
2o . (18.4)
Existem tres solucoes possıveis da Eq. 18.2:
• ∆ > 0 ou λ > ωo - regime aperiodico: o atrito fluido e importante.
As duas solucoes da caracterıstica sao reais e negativas:
α1 =−λ +√
λ 2−ω2o
α2 =−λ −√
λ 2−ω2o
(18.5)
A solucao geral e do tipo
x(t) = A1e−(γ
2+β )t +A2e−(γ
2−β )t , (18.6)
onde
β2 =
γ2
4−ω
2o . (18.7)
• ∆ < 0 ou λ < ωo - movimento oscilatorio amortecido: o atrito fluido e fraco.
As raızes da equacao caracterıstica sao:
α1 =−λ + iω ′ α2 =−λ − iω ′, (18.8)
onde i representa o numero imaginario, i =√−1.
A solucao desta equacao e do tipo:
x = Aoe−b
2m t cos(ω ′t +δ )x = A(t)cos(ω ′t +δ )
(18.9)
onde
ω′2 =
km− b2
4m2 (18.10)
e, portanto,
ω′2 < ω
2o =
km
(18.11)
A Fig. 18.2 mostra o grafico da funcao para dois valores distintos do coeficiente deatrito b.

18.1 Oscilacoes amortecidas 379
Fig. 18.2 Grafico do deslocamento x versus tempo. Quanto maior for b, maior o amortecimento,e mais rapidamente decresce a amplitude (mostrada com curvas a tracejado), enquanto que T au-menta, sendo To o perıodo na ausencia de atrito.
A amplitude decresce com o tempo:
E = 12 kA2
E(t) = 12 kA2
oe−bm t
E(t) = Eoe−bm t = Eoe−γt
(18.12)
γ = bm e o seu inverso τ = 1/γ chama-se constante de amortecimento e mede
quanto tempo o oscilador perde 1/e do valor da sua energia inicial.Chama-se factor de qualidade Q de um oscilador harmonico submetido a um
amortecimento viscoso, ao produto:
Q = ωτ. (18.13)
Pode-se igualmente definir Q como o racio da energia dissipada em cada oscilacao,sobre a energia total do oscilador:
Q = 2πenergia−do−oscilador
energia−dissipada− por− periodo. (18.14)
Exemplo 1: Oscilador acustico.Um vaso de volume V encontra-se obstruıdo por um embolo de seccao S e de
massa m, podendo-se mover no interior do colo de comprimento l do tubo cilindrico(Fig. 18.3). No equilıbrio, a posicao do embolo esta em x = 0 e a pressao no interiordo vaso e P, sendo Po a pressao no exterior, e as duas sao iguais no equilıbrio, P=Po.
Fig. 18.3 Oscilador acustico.
QuadroNegro 1

380 18 Oscilacoes
APLICACAO NUMERICA : S = 1 cm2, Po = 105 Pa, ρo = 10−3 g/cm3, l = 1 cm,Vo = 1 l, ω = 1.2 rad/s, ou ν ' 200 Hz.
Exemplo 2: Movimento de rolar 1 de um navio.O movimento de “roulis”, brusco ou lento, provoca sempre problemas a bordo:
carga solta, acidentes humanos, enjoo, ...Em geral, os navios possuem sistemasestabilizadores que contrariam o movimento. Pequenas quilhas laterais ou esta-bilisadores activos, tais como hidrofolios anti-roulis comandadas por uma centralde estabilisacao contrariam o movimento. Assimile um navio a um meio-cilindrohomogeneo de raio R, comprimento L e densidade volumica ρ . O momento deinercia el relacao ao eixo XX’ mostra-se que e Ix =
12 MR2. Quando o navio esta
em equilıbrio, o peso M−→g aplicado no ponto Go e a impulsao de Arquimedes−→Π
aplicada em G′ - por baixo de G - para que resulte equilıbrio do navio, sao iguais edirectamente opostos. Quando o navio se inclina de um angulo θ , o volume de aguadeslocado e
−→Π permanecem invariaveis, enquanto que o o ponto de aplicacao do
peso desloca-se de Go para G. O navio fica sujeito a um binario que tende a traze-lode volta ao equilıbrio e o navio e estavel. Determine o perıodo das oscilacoes donavio devido a este tipo de movimento.
Fig. 18.4 Movimento de “roulis” de um navio. Seccao do plano transversal.
O torque que tende a trazer o navio para o equilıbrio e dado por
−→τ = [−→r ×M−→g ]. (18.15)
τ = Mgd sinθ ≈MgdθdLdt = Ixα =−Mgdθ
θ + MgdIx
θ = 0.(18.16)
onde d = OG e sendo o perıodo dado por
T = 2π
√Ix
Mgd(18.17)
Aplicacao numerica: L = 100 m, R = 6 m, ρ = 0.43 g/cm3, g = 9.8 m/s2.
⇒ T = 5.33s. (18.18)
Finalmente, outro tipo de oscilacao possıvel corresponde ao seguinte valor dodiscriminante reduzido:
• ∆ = 0 ou λ = ωo - movimento aperiodico crıtico.
A raiz dupla da caracterıstica e α =−λ e a solucao geral e do tipo:
1 Em frances, diz-se “roulis” e em ingles, “roll”.

18.1 Oscilacoes amortecidas 381
x(t) = (A+Bt)e−γt2 . (18.19)
Sejakm −
b2
4m2 = 0⇒ bc = 2
√km.
(18.20)
bc e o factor de amortecimento crıtico que corresponde ao caso limite para o qualo movimento muda de oscilante para aperiodico.
Recordamos que a frequencia de oscilacao do sistema massa-mola com atrito edada por
ω′2 = ω
2o −
γ2
4. (18.21)
Se b > bc, ω ′2 < 0, o que significa que nao ha oscilacao.No caso do amortecimento crıtico, temos b = bc = 2
√mk.
O amortecimento crıtico e importante no sistemas mecanicos. Uma forca con-stante aplicada subitamente a um sistema que se encontra inicialmente em repousoresulta numa nova posicao de equilıbrio sem oscilacao ou solavanco. Logo que sepretende um regresso rapido a posicao de equilıbrio, tem-se que ser escolhido esteregime crıtico. O que acontece, por exemplo, com os amortecedores dos automoveis,os instrumentos de medida das balancas, os galvanometros.
Note tambem que:E = 1
2 mv2 + 12 kx2
dEdt = mv dv
dt + kx dxdt
= v(ma+ kx)=−bv2
(18.22)
Em resumo:Se b = 0, nao existe amortecimento, dE/dt = 0, isto e, E =Const..Se b 6= 0, E decresce com o tempo.
18.1.1 O factor Q de um oscilador
Vimos anteriormente que a energia media do oscilador decai exponencialmente como tempo:
< E >= 12 mω2
o A2e−γt
= Eoe−γt (18.23)
E costume definir o tempo de decaimento τ o intervalo de tempo ao fim do qual aenergia media decai uma fraccao 1/e do seu valor inicial,
τ = 1γ
(a)d<E>
dt = −γ < E > (b)(18.24)

382 18 Oscilacoes
γ representa a taxa de decrescimo relativo da energia media por unidade de tempo.Da Eq. 18.24-(b) obtem-se
∆ < E >=−d < E >
dtτ = γ < E > τ (18.25)
Define-se o factor de merito (ou factor “Q” 2) do oscilador, a grandeza sem di-mensoes:
Q = 2π
(Energia−armazenada−no−oscilador
Energia−dissipada− por− ciclo
). (18.26)
O factor “Q” pode-se ainda escrever na forma:
Q = 2π< E >
∆ < E >=
2π
γτ=
ωo
γ. (18.27)
Exemplo 3: Um diapasao musical vibra a frequencia de 440 Hz. Um medidor denıvel de som indica que a intensidade de som decresce de um factor 5 em 4 s. Quale o factor de qualidade do diapasao?
A intensidade do som provindo do diapasao e proporcional a energia do os-cilador. A energia do oscilador decresce como
E(t) = Eoe−γt , (18.28)
onde τ = 1γ= m
b .Eoe−γ4
Eoe−γ0 = 15 = e−γ4
∴ 4γ = ln5 = 1.6γ = 0.4s−1.
(18.29)
e o factor de qualidade e
Q =ω ′
γ=
2π4400.4
≈ 7000. (18.30)
As perdas de energia devem-se principalmente ao aquecimento do metal quandoeste dobra, ao atrito do ar e a perda de energia no “pivot” do diapasao.
Exemplo 4: Os motores de detonacao pulsado, “pulsejet”, despertam actual-mente grande interesse em propulsao aeronautica. Foram usados na WWII pelosalemaes com a designacao V-1 “buzz-bomb” (Fig. 18.5). Paul Schmidt, consideradopor muitos como o seu inventor, considerava-o um motor de ressonancia acustico,no sentido em que todos os estagios do ciclo mecanico sao realizados por ondasestacionarias geradas pela explosao da mistura ar-combustıvel. O comportamentodas ondas estacionarias e determinado pela geometria e as propriedades acusticas emecanicas do motor. Cabe ao engenheiro a “afinacao do “pulsejet”, tal como se setratasse de um orgao de igreja.
2 Factor “Q” para “qualidade”.

18.1 Oscilacoes amortecidas 383
O “pulsejet” produz impulso quando o combustıvel (ex: gasolina, metanol,...) einflamado aproximadamente a frequencia de resonancia do motor. Usualmente, aconfiguracao do motor e tal que o ar e introduzido atraves das valvulas na partefrontal do motor, sendo aquecido por injeccao de combustıvel. Os gases queimadossao expelidos e o aumento de pressao obriga as valvulas de entrada a fecharem-se eos gases produzidos a expandirem-se atraves da conduta de ejeccao. Com os gasesexpelidos ocorre uma queda de pressao na camara de combustao, permitindo umanova abertura da valvula dianteira, e repetindo-se o ciclo. A funcao da valvula deabertura e a de impedir a reversao do fluxo, o que anularia o movimento unidire-cional. Porem, a reversao do fluxo pode ser igualmente impedida por meio de umaconcepcao apropriada do funcionamento das valvulas e da area de injeccao. O “fac-tor de qualidade” do ressoador e de particular importancia, assim como a fısica dosfenomenos ondulatorios associados. A maioria das vezes os engenheiros se limitama correccoes ad-hoc do motor.
Fig. 18.5 Pulse jet.
Exemplo 5: o Efeito “Pogo” Os motores de foguetao estao todos sujeitos afluctuacoes de impulso, devido ao processo de injeccao de combustıvel, sua exp-losao e expansao na camara de exaustao, que nao e perfeitamente uniforme. Esteprocesso repetitivo gera um movimento oscilatorio caracterizado por uma dadafrequencia. Se esta frequencia coincidir com a frequencia de oscilacoes longitu-dinais do foguetao, este vibrara perigosamente na longitudinal, constituindo o talefeito “Pogo” (o mesmo nome do brinquedo). Na astronautica conta-se o caso dadescolagem do Apollo 6 que comecou de imediato com problemas. Logo apos aqueima do foguetao do primeiro andar, o veıculo iniciou um perıodo de 30 s comseveras oscilacoes longitudinais, como se fosse um diapasao.
18.1.2 Oscilacoes forcadas: ressonancia e impedancia mecanica
Vimos que os fenomenos dissipativos reduzem as amplitudes das oscilacoes. Es-tudaremos em seguida as condicoes em que se podem entreter as oscilacoes comaplitude constante- o fenomenos das oscilacoes forcadas.
Consideremos um sistema submetido a uma forca
f (t) = fo cosωt. (18.31)
A equacao do movimento e
md2xdt2 +b
dxdt
+ kx = fo cosωt. (18.32)

384 18 Oscilacoes
A solucao geral desta equacao e a soma de um integral geral da equacao sem se-gundo membro, x1(t), e de um integral particular x2(t) da equacao com segundomembro:
x(t) = x1(t)+ xo cos(ωt +δ ), (18.33)
onde δ representa o angulo de fase de x com F . O esquema representativo destesistema mecanico encontra-se representado na Fig. 18.6.
Fig. 18.6 Representacao grafica do sistema massa mola forcado e com atrito.
No inıcio do movimento a expressao x(t) e complicada pois representa o regimetransitorio. Ao fim de um certo tempo a solucao x1(t) tende para zero e, no final,resta somente a solucao x2(t) que define o regime permanente.
As oscilacoes permanentes
x2(t) = xo cos(ωt +δ ) (18.34)
sao designadas de oscilacoes forcadas: a sua pulsacao e a da forca aplicada e eindependente das caracterısticas do sistema oscilante.
18.1.2.1 Pesquisa do sistema oscilante
Associemos a equacao do movimento anterior a equacao diferencial:
md2zdt2 +b
dzdt
+ kz = foeiωt , (18.35)
onde z e uma quantidade complexa. Vamos procurar uma solucao da forma
z = xoeiδ eiωt = xeiωt (18.36)
ondex = xoeiδ , (18.37)
e i =√−1 e o numero imaginario puro. Temos sucessivamente
z = xeiωt (a)dzdt = iωxeiωt = iωz (b)
d2zdt2 =−ω2z (c)
(18.38)
de onde resulta(−mω2 + ibω + k)x = fo (a)
x = fo(k−mω2)+iωb (b)
(18.39)
Podemos desenvolver um pouco mais o calculo:

18.1 Oscilacoes amortecidas 385
xoeiδ = x = fo[(k−mω2)−ibω](k−mω2)2+(bω)2 (a)
= fo(k−mω2)(k−mω2)2+(bω)2 − i fobω
(k−mω2)2+(bω)2 (b)
∴ tanδ =− ωhk−mω2 (c)
xo =fo√
(k−mω2)2+(bω)2(d)
(18.40)
A fase δ diz-nos que o deslocamento atinge o seu valor maximo para um dadoangulo δ antes da forca.
Este regime e uma oscilacao sinusoidal de pulsacao (ou frequencia angular) igual
a pulsacao excitatriz ω , diferente da pulsacao propria do oscilador ωo =√
km . Diz-se
que o movimento e uma oscilacao forcada por um excitador externo.
18.1.3 Ressonancia da amplitude. Ressonancia da velocidade
Consideremos agora o denominador da Eq. 18.40-(d) na forma
xo = foA−1/2 (18.41)
e procuremos os valores de ω que correspondem ao maximo dessa funcao:
A = (k−mω2)2 +(bω)2
∴ dAdω2 = 2(k−mω2)(−m)+b2 = 0−2mk+2m2ω2 +b2 = 0∴ ω2
m = 2mk−b2
2m2 = km −
b2
2m2 .
(18.42)
Verificamos assim que o maximo da amplitude do movimento oscilatorio ocorrepara uma pulsacao ωm:
ωm =√
ω2o −2λ 2, (18.43)
para a qual diz-se que ha ressonancia entre o oscilador e a forca excitadora. λ ≡ b2m .
ωo ≡√
km e a frequencia natural do sistema na ausencia de atrito e da forca aplicada.
Para que ωm tenha sentido e preciso que λ < ωo√2, o que corresponde a presenca
de pequenos atritos. Neste caso, xo atinge um maximo e ocorre ressonancia da am-plitude. A medida que λ decresce, ωm aumenta provocando o aumento de xo.
Pelo contrario, quando λ > ωo√2, ωm nao e definida e nao ocorre ressonancia. xo
decresce quando ω cresce. Estas observacoes encontram-se condensadas na formado grafico de Xo = Xo(ω):
QuadroNegro 2 - Amplitude versus ω no oscilador forcado.

386 18 Oscilacoes
O avanco de fase δ da oscilacao sobre a forca excitadora e funcao de ω:
tanδ =ωb
mω2− k=
2ωλ
ω2−ω2o. (18.44)
A sua derivada e a seguinte:
(1+ tan2 δ ) dδ
dω= b(mω2−k)−ωb2mω
(mω2−k)2 = bmω2−bk−2mbω2
(mω2−k)2
=− b(k+mω2)(mω2−k)2 .
(18.45)
Com o calculo anterior podemos tracar o grafico de δ (ω), tal como esta represen-tado em baixo:
QuadroNegro 3 - Grafico de δ = δ (ω).
Repare que o deslocamento esta sempre em atraso (de um angulo δ ) em relacaoa forca aplicada.
Como se pode concluir do grafico de δ , temos as seguintes situacoes extremas:

18.1 Oscilacoes amortecidas 387
• Frequencia de excitacao fraca, ω ωo, δ → 0.
A resposta a baixa frequencia esta em fase com a forca aplicada. Atendendo a que
xo =fo√
m2(ω2o−ω2)2+(2λω)2
∴ xo→ fomω2
o= fo
k .(18.46)
Conclusao: a forca elastica controla a resposta do sistema.
• Resposta a frequencia de ressonancia, ω = ωo.
tanδ = ∞⇒ δ =−π
2xo =
fo2mλω
= fo2m b
2m ω= fo
bω. (18.47)
Quanto menor for o atrito, maior sera a amplitude do movimento e maior sera otempo de relaxacao do movimento,
τ =mb. (18.48)
A resposta maxima e obtida para um angulo δ =−π/2, quando o deslocamento temum atraso de π/2 sobre a forca.
A potencia absorvida pelo oscilador nao depende directamente da fase entre aforca aplicada e o deslocamento, mas entre a forca aplicada e a velocidade.
• Excitacao a alta frequencia, ω ωo:
δ →−π
xo→ fomω2 .
(18.49)
Neste limite, a resposta diminui como 1/ω2: a inercia da massa controla a respostaas altas frequencias.
18.1.4 Ressonancia da velocidade. Impedancia mecanica
x e a parte real de z = xeiωt (isto e, x = Rez) e v e a parte real de dzdt = iωz.
Vamos agora escreverdzdt
= veiωt ⇒ v = iωx. (18.50)
Portanto, temos igualmente
z =v
iωeiωt , (18.51)
donde se obtem ainda

388 18 Oscilacoes
dzdt = veiωt
d2zdt2 = iωveiωt .
(18.52)
Introduzindo estas derivadas sucessivas na equacao diferencial 18.52, obtem-se fi-nalmente
(imω +b+k
iω)v = fo. (18.53)
Ora, chama-se impedancia mecanica a expressao:
Z = b+ i(
mω− kω
). (18.54)
Mostra-se em particular que a amplitude da velocidade das oscilacoes e dada pelaexpressao:
vo =fo√
b2 +(mω− kω)2
=fo√
b2 +mk(
ω
ωo− ωo
ω
)2. (18.55)
Qual e o comportamento desta funcao de ω em torno de ωo?
QuadroNegro 4 - Grafico de vo = vo(ω).

18.1 Oscilacoes amortecidas 389
Conclui-se que, para qualquer λ , a amplitude da velocidade exibe um maximopara ω = ωo; diz-se que ha ressonancia da velocidade. Quanto menor for o atrito λ ,mais agudo sera o maximo da amplitude da velocidade.
18.1.5 Aspecto energetico
Sabemos queK = 1
2 mv2 U = 12 kx2
x = xo cos(ωt +δ ) v = dxdt =−v0 sin(ωt +δ )
(18.56)
donde se obtem sem dificuldade
K = 12 mv2
o sin2(ωt +δ ) U = 12 kx2
o cos2(ωt +δ ). (18.57)
Como vimos na Seccao dedicada ao movimento harmonico simples, os valoresmedios de K, e U sao:
< K >= 14 mv2
o <U >= 14 kx2
o. (18.58)
Multipliquemos por dx/dt os dois membros da equacao diferencial do movimento.Tem-se
m d2xdt2
dxdt +b( dx
dt )2 + kx dx
dt = fo cosωt dxdt
ddt [
12 m( dx
dt )2]+b( dx
dt )2 + d
dt (12 kx2) = fo cosωt dx
dt .
⇒ ddt (K +U) = fo cosωt dx
dt −b( dxdt )
2.
(18.59)
Procuremos o valor medio dos dois membros sobre um perıodo T :
1T
∫ T
0
dEdt
dt =− 1T
fovo
∫ T
0sin(ωt +δ )cosωtdt− 1
T
∫ T
0bv2
o sin2(ωt +δ )dt
(18.60)Ora, E e uma funcao periodica:
E(t = 0) = E(t = T ). (18.61)
Resta-nos assim:
− fovo
∫ T
0sin(ωt +δ )cosωtdt = bv2
o
∫ T
0sin2(ωt +δ )dt. (18.62)
Podemos aqui usar a conhecida relacao trigonometrica:
sinAcosB =12(sin(A−B)+ sin(A+B)), (18.63)
ou seja,

390 18 Oscilacoes
sin(ωt +δ )cosωt = 12 [sinδ + sin(2ωt +δ )]
⇒− fovo12 sin(δ )T = bv2
o12∫ T
0 [1− cos(ωt +δ )]dt
= bv2o
2 [T − sin2(ωt+δ )2ω
]T0= bv2
o2 [T − 1
2ω(sin2(2π +δ ))− sin2δ ]T0
⇒− 12 fovo sinδ = 1
2 bv2o.
(18.64)
Da Tabela da funcao δ podemos verificar que sinδ < 0. O resultado anteriorleva-nos a concluir que a potencia media fornecida pela forca f e dissipada nosfenomenos de atrito de coeficiente b.
18.1.6 Absorcao de potencia
Repare que o deslocamento e dado por:
x(t) = xo cos(ωt +δ ) = xo cos(
ωt + arctan2ωλ
ω2−ω2o
). (18.65)
Podemos assim obter a potencia media:
P =< f x >=− foxo < cosωt sin(ωt +δ )> . (18.66)
Atendendo a que:
cosα sinβ =12[sin(α +β )− sin(α−β )], (18.67)
o valor medio do ultimo termo da Eq. precedente tem como resultado
< cosωt sin(ωt +δ )>=12< sin(2ωt +δ )− sin(−δ )>=
12
sinδ , (18.68)
porque< sinωt cosωt >= 0. (18.69)
Ora ja vimos que
sinδ =fo
xom−2ωλ√
(ω2o −ω2)2 +(2λω)2
, (18.70)
e inserindo esta expressao na formula da potencia media, obtemos finalmente
P =12
f 2o
m2ω2λ
(ω2o −ω2)2 +(2λω)2 . (18.71)
Na ressonancia tem-se ω = ωo e a potencia media absorvida e
Po =12
f 2o
m2ω2
o λ
(2λωo)2 =14
f 2o
mλ=
12
f 2o
b=
12
f 2o
mτ. (18.72)

18.1 Oscilacoes amortecidas 391
A potencia media absorvida fica reduzida a metade do seu valor no ponto de res-sonancia quando ω varia de ±(∆ω)1/2, tal que (Fig. 18.7):
ω
τ= ω2
o −ω2 = (ωo +ω)(ωo−ω)' 2ωo(∆ω)1/2.
⇒ 2(∆ω)1/2 ≈ 1τ
(18.73)
Fig. 18.7 Potencia em funcao da frequencia para um oscilador harmonico amortecido.
Como ja referimos, o factor de qualidade define-se pela expressao:
Q = 2πenergia−armazenada
perda−de− energia− por− periodo=
2πEP/ν
=E
P/ω. (18.74)
Concluımos assim que
Q≈ EE/(ωoτ)
≈ ωoτ =ωo
2(∆ω)1/2=
frequencia de ressonancialargura total a meia altura da potencia
.
(18.75)O factor de qualidade Q mede a fineza da sintonia.
• Sismo: Q = 250∇ ·1400• Corda de piano: Q = 103.• ...
Na Fig. 18.8 mostra-se uma serie de fotografias tiradas em Julho de 1940 naPonte de “Tacoma Narrows” no dia em que colapsou. A ponte tinha cerca de 1600metros de comprimento. Bastou que o vento soprasse a 70 km/h para que a pontecomecasse a vibrar. A ponte foi destruıda devido ao fenomeno de ressonancia.
Fig. 18.8 A ponte de “Tacoma Narrows” no dia em foi destruıda pelo fenomeno de ressonancia.
Exemplo 6: Decaimento da nota de um saxofone: Se um saxofone tıpico possuium factor de qualidade Q = 10, quanto tempo levara uma nota de 100-Hz tocadapor um saxofone a desvanecer-se?
Um factor Q = 10 significa que e preciso 10 ciclos para que a vibracao decaia.Dez ciclos a frequencia angular (ou pulsacao) de 100 Hz corresponde, de acordocom Q ≈ ωoτ a um tempo de relaxacao de 0.1 segundos, o que e curto. A notaemitida por um saxofone nao reverbera como acontece com as notas emitidas porum piano ou guitarra electrica.
Exemplo 7: Q de um receptor de radio. Um receptor de ondas hertzianas nabanda FM precisa de ser sintonizado com uma largura de banda de 0.1 MHz paraum sinal de frequencia de 100 MHz. Determine o Q do aparelho.

392 18 Oscilacoes
Use aqui Q = ωo2(∆ω)1/2
= 1000.1 = 1000. Este valor e muito superior ao que e en-
contra na maioria dos sistemas mecanicos.Exemplo 8: O factor de qualidade Q de um alti-falante estereo deve ser por um
lado baixo, pois de outro modo continuaria a vibrar mesmo apos o final da notamusical registada e, por outro lado, sendo baixo, maior sera a gama de frequenciasque ele pode reproduzir (relacionado com o factor 2(∆ω)1/2).
18.1.7 Oscilacoes acopladas
Consideremos um sistema de dois pendulos acoplados com o mesmo comprimentol e massa m, ligados por uma mola de constante elastica k e sujeitos a oscilar noplano vertical definido pelas suas posicoes de equilıbrio (Fig. 18.9). O sistema temdois graus de liberdade.
Sejam x1 e x2 os deslocamentos das duas partıculas suspensas em relacao aposicao de equilıbrio e que por hipotese sejam suficientemente pequenos para quese possam confundir os arcos com as cordas, x1 ≈ lθ1 e x2 ≈ lθ2. A mola deforma-se com o alongamento x2 − x1, supostamente positiva, tal como se apresenta naFig. 18.9 e donde se pode concluir que tera que resultar a forca k(x2− x1) para adireita agindo sobre a partıcula 1 e −k(x2− x1) (para a esquerda) agindo sobre apartıcula 2. As duas massas encontram-ser igualmente sujeitas as forcas gravıticascom as componentes tangenciais respectivas:
−mgsinθ1 ≈−mgθ1 =−mg x1l =−ω2
o x1−mgsinθ2 ≈−mgθ2 =−mg x2
l =−ω2o x2
(18.76)
onde ωo =√
gl . Desprezando qualquer tipo de amortecimento, obtemos as equacoes
do movimento das duas massas:
mx1 =−mω2o x1 + k(x2− x1) (a)
mx2 =−mω2o x2− k(x2− x1) (b)
(18.77)
onde definimos uma nova variavel com o proposito de simplificar a escrita:
K =km. (18.78)
Dividindo as Eqs. 18.77 por m, obtemos as equacoes do movimento na forma
x1 +ω2o x1 = K(x2− x1);
x2 +ω2o x2 = K(x2− x1).
(18.79)
Neste caso, podemos desacoplar as duas equacoes. Somando membro a membro,obtemos primeiro
(x1 + x2)+ω2o (x1 + x2) = 0. (18.80)

18.1 Oscilacoes amortecidas 393
Subtraindo as mesmas Eqs. 18.79, obtemos por sua vez
(x1− x2)+ω2o (x1− x2) =−2K(x1− x2). (18.81)
Repare agora que se escolhermos um novo tipo de variaveis, tais como,
q1 =12 (x1 + x2);
q2 =12 (x1− x2),
(18.82)
as Eqs. 18.80 e 18.81 apresentam-se na forma desacoplada:
q1 +ω2o q1 = 0 (a)
q2 +ω22 q2 = 0 (b)
(18.83)
onde foi introduzido o parametro:
ω2 =√
ω2o +2K. (18.84)
As solucoes matematicas das Eqs. 18.83 sao as seguintes:
q1(t) = A1 cos(ωot +δ1) (a)q2(t) = A2 cos(ω2t +δ2) (b)
(18.85)
E facil confirmar que x1 e x2 sao ambos dados em funcao destas variaveis q’s:
x1(t) = q1(t)+q2(t);x2(t) = q1(t)−q2(t).
(18.86)
As coordenadas q1 e q2, como verificamos, oscilam harmonicamente e chamam-secoordenadas normais. Com elas o sistema fica desacoplado e podemos ver semdificuldade que q1 corresponde ao deslocamento do centro de massa, enquanto que2q2 = x1− x2 corresponde ao deslocamento relativo entre as duas partıculas.
Se escolhermos apropriadamente as condicoes iniciais, tais como:
A2 = 0 Corresponde a q1(t) = A1 cos(ωot +δ1) = x1(t) = x2(t). O deslocamentodos dois pendulos sao iguais, e o chamado modo simetrico e como a mola nao edeformada, tudo se passa como se ela nao existisse e cada pendulo oscila com asua frequencia livre ωo (Fig. 18.9-(b)).
A1 = 0 Corresponde a q2(t) = x1(t) = A2 cos(ω2t +δ2) = −x2(t). O desloca-mento dos dois pendulos sao iguais e contrarios sendo chamado de modo as-simetrico. Como a forca restauradora da mola aparece, a frequencia de oscilacaoe mais elevada, ω2 > ωo (Fig. 18.9-(c)).
Fig. 18.9 (a) Sistema de dois pendulos acoplados; (b) modo simetrico; (c) modo antissimetrico.

394 18 Oscilacoes
As condicoes iniciais para o modo simetrico correspondem ao mesmo desloca-mento inicial e a mesma velocidade inicial:
x10 = x20x10 = x20
(18.87)
No modo antisimetrico temos deslocamentos e velocidades iniciais contrarias:
x10 =−x20x10 =−x20
(18.88)
Em particular podemos analisar o que se passa se deslocarmos apenas um dospendulos da posicao de equilıbrio, deixando o outro no repouso:
x10 = a;x20 = 0; x10 = x20 = 0. (18.89)
As condicoes iniciais para as coordenadas normais sao:
q10 = q20 =a2
; q10 = q20 = 0 (18.90)
Como se pode ver rapidamente, as solucoes gerais dao
δ1 = δ2 = 0; A1 = A2 =a2 . (18.91)
ou seja, obtemos como solucao duas superposicoes de mesma amplitude e frequenciadiferentes:
x1(t) = a2 [cos(ωot)+ cos(ω2t)] (a)
x2(t) = a2 [cos(ωot)− cos(ω2t)] (b) (18.92)
Se definirmos uma frequencia angular media:
ω ≡ 12(ωo +ω2) (18.93)
e as diferencas de frequencias
∆ω ≡ ωo−ω2 (18.94)
podemos reescrever as Eqs. 18.92 na forma:
x1(t) = acos(
∆ω
2 t)
cos(ωt)x2(t) = asin
(∆ω
2 t)
sin(ωt)(18.95)
Usamos aqui as relacoes trigonometricas:
cos(A)+ cos(B) = 2cos A+B2 cos A−B
2 ,
cos(A)− cos(B) = 2sin A+B2 sin A−B
2 .(18.96)

18.1 Oscilacoes amortecidas 395
No caso limite do acoplamento fraco, quando a forca restauradora e pequena,verifica-se
K ω2o ;∆ω ω. (18.97)
As solucoes correspondem ao fenomeno de batimentos, onde x1 e modulado porcos ∆ω
2 t e x2 e modulado por sin(
∆ω
2 t)
(Fig. 18.10).
Fig. 18.10 Fenomeno de batimentos.
Exemplo 9: Osciladores acoplados longitudinais: Duas massas iguais estao lig-adas por meio de molas entre si e a duas extremidades fixas, segundo a mesmadireccao (como mostra a Fig. 18.11). As molas que ligam as massas as extremi-dades tem constante de restituicao k e a mola que liga as duas massas tem constantek′.
a) Escreva o lagrangeano do sistema: [Sugestao: escolha como coordenadas gen-eralizadas os deslocamentos das massas em relacao as suas posicoes de equilıbrio.]
K = 12 m1x2
1 +12 m2x2
2U = 1
2 kx21 +
12 k′(x1− x2)
2 + 12 kx2
2L = K−U = 1
2 m1x21 +
12 m2x2
2−12 kx2
1−12 k′(x1− x2)
2− 12 kx2
2
(18.98)
Fig. 18.11 Duas massas unidas por tres molas elasticas a duas paredes fixas.
b) Determine as equacoes do movimento.Atendendo a que se tem duas coordenadas generalizadas, temos que usar duas
equacoes de Euler-Lagrange:
ddt
∂L∂ x1− ∂L
∂x1= 0
ddt
∂L∂ x2− ∂L
∂x2= 0
(18.99)
donde resultam as duas equacoes do movimento:
m1x1 + kx1 + k′(x1− x2) = 0;m2x2 + kx2− k′(x1− x2) = 0. (18.100)
Podemos escreve-las na forma de um sistema de duas equacoes diferenciais:
x1 +k+k′m1
x1− k′m1
x2 = 0x2 +
k+k′m2
x2− k′m2
x1 = 0.(18.101)
Vamos supor que o movimento e periodico, com solucoes do tipo

396 18 Oscilacoes
x1 = Asin(ωt +φ); x1 =−ω2Asin(ωt +φ)x2 = Bsin(ωt +φ); x2 =−ω2Bsin(ωt +φ)
(18.102)
Substituindo nas equacoes do movimento, tem-se−ω2A+ k+k′
m1A− k′
m1B = 0
−ω2B+ k+k′m2
B− k′m2
A = 0(18.103)
que podemos ainda colocar na forma( k+k′
m1−ω2)A+− k′
m1B = 0
− k′m2
A+(−ω2 + k+k′m2
)B = 0(18.104)
Usando a Regra de Cramer, calcula-se o determinante do sistema:[( k+k′
m1−ω2)− k′
m1
− k′m2
+(−ω2 + k+k′m2
)
]= 0. (18.105)
cujo desenvolvimento lava-nos a uma equacao quartica em ω , ou quadratica em ω2:
ω4−(
k+ k′
µ
)ω
2 +1
m1m2[(k+ k′)2− k′2] = 0 (18.106)
onde introduzimos a massa reduzida a fim de simplificar a escrita da equacao. Con-sideremos em particular o caso de massas iguais, m1 = m2 = m e µ = m/2. Usandoa formula de resolucao, ecnotramos apos alguma algebra as duas solucoes:
ω1 =√
km
ω2 =√
2k′+km
(18.107)
Exemplo 10: Uma mola une dois rotores iguais montados em dois veios circu-lares identicos, tal como mostra a Fig. 18.12.
a) Obtenha o Lagrangiano.b) Obtenha as equacoes do movimento.c) Assumindo k = 5 N/m, K = 90, Ic = 1 e a = 2, determine as frequencias
naturais do sistema.
Fig. 18.12 Uma mola une dois rotores iguais montados sobre dois veios.
Solucao:a) Designemos por θ1 e θ2 os deslocamentos angulares dos rotores. As energias
cinetica e potencial sao dadas por:

18.1 Oscilacoes amortecidas 397
K = 12 Icθ 2
1 + 12 Icθ 2
2 (a)U = 1
2 Kθ 21 + 1
2 Kθ 22 + 1
2 ka2(θ1−θ2)2 (b)
(18.108)
O ultimo termo da Eq. 18.108-(b) resulta de que
Uel =12
k(s1− s2)2 =
12
ka2(θ1−θ2)2. (18.109)
Logo, o Lagrangeano do sistema e
L = K−U =12
Icθ21 +
12
Icθ22 −
12
Kθ21 +
12
Kθ22 +
12
ka2(θ1−θ2)2 (18.110)
b) Calcula-se agora sistematicamente as derivadas que aparecem na Eq. de Euler-Lagrange:
∂L∂θ1
= Kθ1 + ka2(θ1−θ2)∂L∂ θ1
= Icθ1ddt
∂L∂ θ1
= Icθ1.
(18.111)
donde resulta a equacao de Euler-Lagrange para o primeiro rotor:
Icθ1 +Kθ1 + ka2(θ1−θ2) = 0, (18.112)
e, de forma semelhante, temos tambem a equacao do movimento para o segundorotor:
Icθ2 +Kθ2 + ka2(θ2−θ1) = 0, (18.113)
O ultimo termo de ambas as equacoes faz com que ambas estejam acopladas.c) Supondo que o movimento e harmonico, composto possivelmente por varias
frequencias e amplitudes, pomos
θ1 = Asin(ωt +ψ)θ2 = Bsin(ωt +ψ)
(18.114)
e substituimos em ambas as Eqs. 18.112-18.113. Deveremos obter o sistema de duasequacoes algebricas:
A(−Icω2 +K + ka2)+B(−ka2) = 0A(−ka2)+(−Icω2 +K + ka2) = 0
(18.115)
As duas solucoes no equilıbrio sao A = B = 0 que nao interessam. Esta equacoessao compatıveis se o determinante do sistema e nulo:[
−Icω2 +C −ka2
−ka2 −Icω2 +C
], (18.116)
cujas raızes sao:

398 18 Oscilacoes
ω1 =√
C−ka2
Ic
ω2 =√
C+ka2
Ic
(18.117)
Exemplo 11: Um corpo de 2 kg oscila preso a certa mola com a constante deforca k = 400 N/m. A constante de amortecimento tem o valor b = 2.00 kg/s.O sistema e excitado por uma forca sinusoidal cujo valor maximo e de 10 N ea frequencia angular ω = 10 rad/s. (a) Qual a amplitude da oscilacao? (b) Se afrequencia de excitacao variar, em que frequencia ocorrera a ressonancia? (c) Quala amplitude das oscilacoes a frequencia de ressonancia? (d) Qual a largura ∆ω dacurva de ressonancia.
Os dados numericos sao os seguintes:
m = 2kgk = 400N/mb = 2.00kg/s
Fo = 10Nω = 10rad/s
(18.118)
A equacao do movimento e a seguinte:
∑Fx = max = m d2xdt2 =−kx−bv+Fo cosωt
∴ m d2xdt2 +b dx
dt +mω2o x = Fo cosωt
(18.119)
A solucao e do tipo:x = xtrans + xperm
xperm = Acos(ωt−δ )
A = Fo√m2(ω2
o−ω2)2+b2ω2
tanδ = bω
m(ω2o−ω2)
(18.120)
QuadroNegro 6

18.2 Conceito de onda 399
18.2 Conceito de onda
Todos temos familiaridade com o fenomeno ondulatorio. As ondas electromagneticasemitidas por uma estacao radiodifusora; as ondas radiais que se produzem quandocai uma pedra num lago; ou quando as cordas de um piano sao percutidas, vibramproduzindo uma onda sonora que se espalha pela sala de concerto. Todos estesfenomenos tem em comum duas propriedades importantes: i) a energia propaga-se de um ponto do espaco para outro; ii) o meio nao sofre nenhum deslocamentopermanente em consequencia da perturbacao. O que veremos a seguir e que, apesardo fenomeno ondulatorio poder ser de natureza diferente, todos eles sao governa-dos pela mesma equacao, a equacao da onda. Portanto, uma onda e qualquer sinalque se transmite de um ponto a outro de um meio com velocidade definida. As on-das podem ser transversais (ex: onda electromagneticas) ou longitudinais (ex: ondassonoras).
Vamos abordar o caso mais simples da propagacao de uma onda a 1 dimensao(onda unidimensional). Esta perturbacao, que representaremos aqui pela funcao φ ,propaga-se ao longo do eixo Ox com velocidade v. Nao precisamos de definir exac-tamente que perturbacao e essa; podera ser uma onda electrica fluctuante E(x, t) ouondas transversais numa corda com amplitude y(x, t). Como a perturbacao move-se,teremos que considerar a sua dependencia em x e t. No instante inicial t = 0, φ serauma funcao de x que designaremos por f (x) e a qual chamaremos perfil de onda.Vamos supor que o perfil de onda nao se altera. No instante t = 0 podemos imag-inar que tiramos uma “fotografia” da onda e a curva obtida seria φ = f (x). Comoa onda nao se deforma, se tirarmos uma nova “fotografia” posteriormente no in-stante t veremos o mesmo perfil de onda, simplesmente ela se tera deslocado de vt.Suponhamos agora que deslocamos a origem para este ponto x = vt e as abscissasmedidas a partir daqui sao chamadas por X . E claro que a transformacao de Galileupermite-nos escrever: x = X + vt e a equacao que descreve o perfil de onda na novaorigem passa a ser
φ = f (X), (18.121)
ou seja, referindo-a a origem inicial:
φ = f (x− vt). (18.122)
Se a onda se propaga no sentido negativo do eixo dos Ox a velocidade devera ter osinal contrario e podemos inferir logo que a forma geral de uma onda progressivaque se desloca nos dois sentidos do eixo Ox (onda unidimensional) com velocidadeconstante v e do tipo:
y(x, t) = f (x− vt)+g(x+ vt), (18.123)
onde f e g representam funcoes arbitrarias de x e t.A forma mais simples de representacao de uma onda e a chamada onda harmonica,
que se apresenta com a forma matematica:
f (x′) = Acos(kx′+δ
), (18.124)

400 18 Oscilacoes
onde f (x′) representa uma perturbacao num ponto x′, que corresponde a um ref-erencial que acompanha a onda. Se quisermos passar para um referencial que estafixo no espaco, teremos que aplicar as transformacoes de Galileu, para uma ondaprogressiva que se desloca para a direita sera x′ = x−vt, e a amplitude da onda nestereferencial fixo passara a ser
y(x, t) = Acos[k(x− vt)+δ ]. (18.125)
Mas da relacao de dispersao 3, obtem-se
ω = kv = 2πν =2π
τ. (18.126)
Substituindo a Eq. 18.126 na Eq. 18.125, obtemos a forma geral da onda planamonocromatica:
y(x, t) = Acos(kx−ωt +δ ). (18.127)
O argumento do coseno e chamado a fase da onda:
ϕ(x, t) = kx−ωt +δ , (18.128)
enquanto que δ e chamada a constante de fase. Se acompanharmos o deslocamentoda onda com o tempo de modo a que a fase ϕ se mantenha constante, temos neces-sariamente
dϕ
dt= k
dxdt−ω = 0. (18.129)
Obtem-se daqui finalmente a velocidade de fase da onda, −→v :
dxdt
=ω
k= v = νλ . (18.130)
A frequencia ν = 1/τ da o numero de oscilacoes por unidade de tempo, e σ = 1/λ
da o numero de comprimentos de onda por unidade de comprimento, designando-sepor numero de onda.
Podemos generalizar a Eq. 18.125 de modo a lidar com ondas planas a 3 di-mensoes. Uma onda plana e uma onda que exibe a mesma perturbacao num planoperpendicular a direccao do movimento. Esse plano chama-se de frente de onda.Se a direccao de propagacao e feita ao longo dos eixos Ox, Oy e Oz, entao a equacaoda frente de onda e dada por:
lx+my+nz = constante, (18.131)
onde l, m e n sao os cossenos directores 4.
3 Uma relacao de dispersao contem uma relacao funcional entre energia e quantidade de movi-mento.4 Recordamos que um vector
−→V =Vx
−→u x +Vy−→u y +Vz
−→u z definido em coordenadas cartesianas, sechamarmos por α , β e γ os angulos que o vector
−→V faz com os eixos Ox, Oy e Oz, respectivamente,

18.2 Conceito de onda 401
A equacao de ondas unidimensional e uma das equacoes mais fundamentais dafısica e tem a forma:
1v2
∂ 2y∂ t− ∂ 2y
∂x2 = 0. (18.132)
Esta e uma equacao as derivadas parciais, linear e de segunda ordem. E uma dasequacoes diferenciais mais importante da matematica porque descreve todo o tipode fenomeno ondulatorio no qual a velocidade e constante. A eq. 18.132 pode-seescrever a tres dimensoes na forma:
−→∇
2φ ≡ ∂ 2φ
∂x2 +∂ 2φ
∂y2 +∂ 2φ
∂ z2 =1v2
∂ 2φ
∂ t2 . (18.133)
A equacao de ondas e linear no sentido em que se φ1 e φ2 sao duas solucoes quais-quer da Eq. 18.132, entao a1φ1 + a2φ2 e tambem uma solucao (sendo a1 e a2 duasconstantes arbitrarias). Este e um exemplo particular do princıpio da sobreposicaoque diz que quando a equacao relevante e linear, podemos somar qualquer numerode solucoes individuais para formar novas funcoes que sao elas proprias solucoes.
Exemplo 12: Uma aplicacao particular do princıpio da sobreposicao resultaquando somamos (sobrepomos) duas ondas harmonicas que se propagam em senti-dos diferentes ao longo do eixo Ox, tendo a mesma frequencia e a mesma amplitude:
φ = acos(ωt− kx)+acos(ωt + kx)φ = 2acoskxcosωt (18.134)
Esta e uma onda estacionaria, devendo o seu nome ao facto que o perfil naose altera, a onda anula-se nos pontos onde coskx = 0, isto e, para x = (n+ 1
2 )π ,n = 0,±1,±2, .... Estes pontos chamam-se nos, e os pontos intermedios, onde aamplitude da onda atinge o valo maximo chama-se ventres.
A tres dimensoes terıamos as ondas harmonicas representadas na forma:
φ = 2acos2π
λ(lx+my+nz)cos
2π
λ(vt). (18.135)
Neste caso, a onda anula-se nos planos nodais:
2π
λ(lx+my+nz) = (n+ 1
2 )π
lx+my+nz = (n+ 12 )
λ
2 ,n = 0,±1,±2, ...(18.136)
A Tabela 18.1 apresenta resumidamente e para facilidade de consulta os resulta-dos anteriores.
entao Vx = V cosα , Vy = V cosβ e Vz = V cosγ . Os cossenos directores sao as quantidades cosα ,cosβ e cosγ .

402 18 Oscilacoes
Table 18.1 Ondas progressivas e estacionarias.
Dimensao Onda progressiva Onda estacionaria
1-dim, Equacao ∂ 2φ
∂x2 = 1v2
∂ 2φ
∂ t2∂ 2φ
∂x2 = 1v2
∂ 2φ
∂ t2
Solucao φ = f (ωt− kx)+g(ωt + kx) φ = acoskxcosωt
3-dim, simetria esferica ∂ 2φ
∂ r2 + 2r
∂φ
∂ r = 1v2
∂ 2φ
∂ t2
Solucao φ = 1r f (ωt−
−→k ·−→r )+ 1
r g(ωt−−→k ·−→r )
18.2.0.1 Equacao do telegrafista F
Quando o movimento ondulatorio se realiza na presenca de alguma forca dissipativa,uma forca de fricao por exemplo, esta forca podera ser representada na equacaode onda, Eq. 18.132, por um novo termo proporcional a velocidade da vibracaoda forma k ∂φ
∂ t . A equacao de onda modificada e conhecida como a equacao dotelegrafista:
∇2φ =
1v2
[∂ 2φ
∂ t2 + k∂φ
∂ t
](18.137)
e desempenha um papel importante no estudo das linhas de transmissao.
18.2.1 Equacao das cordas vibrantes
Seja µ a densidade linear de massa da corda. Um elemento infinitesimal de compri-mento ∆x tem a massa ∆m = µ∆x.
Vamos considerar um deslocamento transversal de pequena magnitude de umponto x da corda da sua posicao de equilıbrio e designar a sua nova posicao pory(x, t). Nesta aproximacao vamos considerar praticamente constante o comprimentoda corda assim como as tensoes exercidas sobre ela em dois pontos x e x+∆x. Asforcas exercidas serao assim devidas unicamente a variacao da direccao da tensao,introduzindo uma forca restauradora ao longo de Oy.
Ve-se na Fig. ?? (ou QN% 7) que no ponto x+∆x a componente em y da tensaoe
T sinθ ≈ T tanθ = T∂y∂x
. (18.138)
O angulo θ e o angulo entre a tangente a corda e o eixo Ox e usamos a aproximacaosinθ ≈ tanθ valida para pequenos angulos θ 1. Recordamos que tanθ = ∂y/∂x.
A forca vertical resultante que actua sobre o elemento ∆x da corda e dada por
T∂y∂x
(x+∆x, t)−T∂y∂x
(x, t) = T ∆x[∂y∂x (x+∆x, t)− ∂y
∂x (x, t)∆x
]. (18.139)
Podemos agora usar uma expansao em serie de Taylor:

18.2 Conceito de onda 403
f (x) = f (xo)+(x− xo)(∂ f∂x
)o +12!(x− xo)
2(∂ 2 f∂x2 )o + ...+
1n!(x− xo)
n(∂ n f∂x2 )o + ...
(18.140)que, neste caso, se ∆x 1, podemos escrever (tente fazer)
∂y∂x
(x+∆x)≈ (∂y∂x
)(x, t)+∆x(∂ 2y∂x2 ) (18.141)
Substituindo a Eq. 18.141 na Eq. 18.139, obtemos
QuadroNegro 7
Chegamos finalmente a equacao das cordas vibrantes unidimensional
µ∂ 2y∂ t2 = T
∂ 2y∂x2 (18.142)
onde a velocidade de propagacao da onda transversal e
v =
√Tµ. (18.143)
Exemplo 13: A impedancia de uma corda vibrante e Z = F/µ =√
µF [kg/s].

404 18 Oscilacoes
18.2.2 Intensidade de uma onda
Uma onda progressiva transporta energia, podendo em particular ser transmitida auma partıcula colocada na extremidade da corda. A forca transversal actuando sobreum elemento da corda no ponto x e dada por
Fy =−T∂y∂x
(x, t). (18.144)
O trabalho realizado sobre o elemento da corda por unidade de tempo e dado peloproduto da forca pela velocidade:
P(x, t) = Fy∂y∂ t
=−T∂y∂x
∂y∂ t
. (18.145)
Para uma onda harmonica temos
∂y∂x =−kAsinϕ
∂y∂ t = ωAsinϕ
(18.146)
A potencia e dada por
P(x, t) = ωkTA2 sin2(kx−ωt +δ ). (18.147)
A media sobre um perıodo chamamos intensidade I da onda. Ela e facilmenteobtida fazendo a media temporal do termo sinusoidal ao quadrado, que ja vimos emfascıculo anterior valer 1/2:
I =< P >= P =12
ωkTA2. (18.148)
Como ja vimos, T = µv2 e ω = kv, e a intensidade da onda tambem se pode escrever
I = P =12
µvω2A2. (18.149)
A intensidade da onda exprime-se em unidades W/m2, e proporcional ao quadradoda amplitude (A2), a velocidade da onda v e ao quadrado da frequencia ( f 2).
18.2.3 Modos normais de vibracao
Consideremos agora uma corda vibrante de comprimento finito l com as extrem-idades presas. Vamos procurar os modos normais de vibracao da corda, isto e,o modo de oscilacao em que todos os elementos da corda oscilam com a mesmafrequencia ω e a mesma constante de fase δ , embora cada ponto x possa natural-mente deslocar-se com amplitude A(x) diferente de ponto para ponto. Isto e, con-

18.2 Conceito de onda 405
sideremos uma onda estacionaria:
y(x, t) = A(x)cos(ωt +δ ) (18.150)
Verifica-se rapidamente que
1v2
∂ 2y∂ t2 =−ω2
v2 A(x)cos(ωt +δ )∂ 2y∂ t2 = d2A
dx2 cos(ωt +δ )(18.151)
ou sejad2Adx2 + k2A(x) = 0 (18.152)
cuja solucao geral e da forma
A(x) = acos(kx)+bsin(kx) (18.153)
A condicao de que as duas extremidades permanecam fixas e dada pela condicaode contorno:
y(0, t) = y(l, t) = 0,∀t. (18.154)
Esta relacao implica que temos que ter tambem
A(0) = a = 0A(l) = bsin(kl) = 0 (18.155)
Atendendo a que b 6= 0 forcosamente (de outro modo seria tudo nulo), concluımosque esta condicao so pode ser satisfeita para valores discretos da variavel k:
kn =nπ
l(18.156)
onde n = 1,2,3, .... As frequencias dos modos normais de vibracao sao
ωn = knv =nπ
lv (18.157)
e a expressao dos modos normais de vibracao e dada por
yn(x, t) = bn sin(knx)cos(ωnt +δn). (18.158)
O comprimento de onda associado λn associado ao modo n e
λn =2π
kn=
2ln. (18.159)
A frequencia νn do modo n e
νn =ωn
2π= n
v2l
= nν1 (18.160)

406 18 Oscilacoes
onde ν1 =v2l =
12l
√Tµ
e a frequencia do modo fundamental. As frequencias da cordavibrante sao multiplos inteiros da frequencia ν1 do modo fundamental. Para tocara nota fundamental temos que dedilhar a corda no meio. A segunda harmonica eproduzida quando dedilhamos a corda com ela presa no meio; a terceira harmonicae produzida quando dedilhamos a corda com ela presa a um terco do seu compri-mento, e por aı adiante.
Os sons tambem podem ser produzidos por uma corda vibrante por meio da suafriccao usando-se um arco feito de madeira, com um feixe de filamentos (geralmentefeitos de crina de cavalo) que sao fixados as suas extremidades sob tensao. Tocam-seassim os seguintes instrumentos: o violino, a viola, o violoncelo, o contrabaixo, aviola da gamba e a rabeca.
A producao de sons pode igualmente ser feita por percussao com baquetas,martelos ou com o proprio arco. A intensidade das notas e controlada pela forcada percussao. No piano usa-se um teclado com 88 teclas, e cada nota possui ummartelo.
Mais raramente produzem-se os sons nas cordas por movimento do ar. E o casoda harpa eolica.
As cordas vibrantes sao material que dao sonoridade a instrumentos de corda,tais como a guitarra, o cello, ou o piano.
Fig. 18.13 (a) Modos de vibracao de uma corda vibrante. (b) Escala harmonica em notacao musi-cal.
Exemplo 14: Duas ondas transversais de mesma frequencia ν = 100 s−1 sao pro-duzidas num fio de aco de 1 mm de diametro e densidade ρ = 8 g/cm3, submetidoa uma tensao T = 500 N. As ondas sao dadas por
y1 = Acos(kx−ωt + π
6
)y2 = 2Asin(ωt− kx).
onde A = 2 mm. (a) Escreva a expressao da onda harmonica progressiva resultanteda superposicao das duas ondas. (b) Calcule a intensidade da resultante. (c) Se fiz-ermos variar a diferenca de fase entre as duas ondas, qual e a razao entre os valoresmaximo e mınimo possıveis da intensidade da resultante?
Os dados que temos permitem obter:
ν = 100s−1s = 100Hz.ω = 2πν = 628rad/s.
µ = ρA = ρπ(D2 )
2
µ = 2π10−3kg/m
∴ v =√
Tµ=√
5002π10−3 = 282.1m/s
⇒ k = ω
v = 628282.1 = 2.23m−1.

18.2 Conceito de onda 407
E conveniente usarmos numeros complexos z = Aei(ωt+δ ). A parte real do numerocomplexo e dada por
y(t) = Rez(t) = Re[Aei(ωt−kx+δ )] = Acos(ωt− kx+δ ) (18.161)
A superposicao dos dois movimentos consiste no seu somatorio. Iremos somar asquantidades complexas respectivas:
y = y1 + y2
⇒ z = z1 + z2 = Aei(kx−ωt+ π
6 )+2Aei(ωt−kx) (18.162)
Podemos verificar em tabelas trigonometricas os seguintes resultados:
sinθ = cos(θ + π
2
)cos π
6 =√
32
sin π
6 = 12
eiφ = cosφ + isinφ Identidade de Euler
(18.163)
Para o calculo que se segue e muito importante referir o seguinte. Um numero com-plexo pode-se colocar na forma trigonometrica.
FORMA TRIGONOMETRICA DO NUMERO COMPLEXO:
z = x+ iy = r(cosφ + isinφ) = reiφ (a)r =| z |=
√x2 + y2 (b)
φ = Argz = arctan( y
x
)(c)
(18.164)
O x representa a abscissa no eixo real e y representa a ordenada no eixo imaginariovertical, r e o raio vector e θ a orientacao relativamente ao eixo Ox.
Em representacao complexa uma onda exprime-se na forma
y = yo exp i(ωt± kx), (18.165)
representando uma onda propagando-se na direccao do eixo positivo do eixo Oxquando se escolhe o sinal − ou propagando-se em sentido inverso so for tomado osinal +.
Uma onda e representada por uma funcao real, mas uma representacao complexaapresenta geralmente uma conveniencia matematica. Se tomarmos a parte real daEq. 19.164a, obtem-se:
y = yo Reexp i(ωt± kx). (18.166)
Com estes dados podemos reescrever as duas Eqs. 4.79 numa forma mais conve-niente:

408 18 Oscilacoes
y = Acos(kx−ωt + π
6
)+2Asin[−(kx−ωt)]
y = Acos(kx−ωt + π
6
)+2Acos
(kx−ωt + π
2
)z = Aei(kx−ωt+ π
6 )+2Aei(kx−ωt+ π2 )
z = Aei(kx−ωt)[ei π
6 +2ei( π2 )]
z = Aei(kx−ωt)[√
32 + i 1
2 +2i]z = Aeiφ [
√3
2 + 52 i]
(18.167)
onde φ = kx−ωt. Podemos escrever a ultima expressao dentro do parentesis rectona forma
zc = [
√3
2+
52
i] = reiδ , (18.168)
onde, por uma questao de conveniencia, fizemos uma mudanca de variavel parazc = [
√3
2 + 52 i]. O modulo de zc e:
| zc |= r =√
7, (18.169)
enquanto que o argumento de zc calcula-se atraves da formula
δ = Argzc = arctanyx= arctan
52√3
2
= arctan5√3= 1.237rad = 70.89o. (18.170)
Finalmente, podemos agora somar as duas componentes que calculamos separada-mente por uma questao de conveniencia, obtendo a resultante das duas vibracoes:
y = Rez= Arei(φ+δ )
y = 5.20×10−3 cos(kx−ωt +1.237).(18.171)
b) A intensidade resultante e dada pelo quadrado do somatorio das amplitudes:
I = (y1 + y2)2
I = 12 µνω2A2
I = 12 6.28×10−3
√500
6.28×10−3 (2π100)2(5.29×10−3)2
I = 9.79W
(18.172)
c) A intensidade resultante e calculada usando o seguinte resultado. Se duasvibracoes tem a mesma frequencia angular, tal que:
x1(t) = A1 cos(ωt +φ1)x2(t) = A2 cos(ωt +φ2),
(18.173)
entao a magnitude A da resultante e dada pela expressao:
A2 = A21 +A2
2 +2A1A2 cos(φ2−φ1). (18.174)
Podemos obter com facilidade o resultado anterior da Eq. 18.174 se usarmos a rep-resentao complexa da onda:

18.2 Conceito de onda 409
x1(t) = A1 cos(ωt +φ1)⇒ z1(t) = A1ei(ωt+φ1
x2(t) = A2 cos(ωt +φ2)⇒ z2(t) = A2ei(ωt+φ2)(18.175)
A intensidade e dada pela parte real do produto de z pelo seu complexo conjugadoz∗:
I = |z|2 = zz = (z1 + z2)(z1 + z2). (18.176)
Ou seja
I = (A1ei(ωt+φ1 +A2ei(ωt+φ2))(A1e−i(ωt+φ1)+A2e−i(ωt+φ2)))
I = A21 +A1A2ei(φ1−φ2 +A2A1e−i(φ1−φ2)+A2
2I = A2
1 +A22 +2cos(φ1−φ2)
(18.177)
pois que cosθ = 12 (e
iθ + e−iθ ).Verificamos de imediato que os maximos da intensidade (que e proporcional ao
quadrado da amplitude) correspondem aos seguintes valores da diferenca de faseentre as duas ondas:
δ12 ≡ φ2−φ1 = 2nπ(n = 0,±1,±2, ...)∴ Imax ∝ (A1 +A2)
2 (18.178)
Por sua vez, os mınimos de intensidade correspondem aos seguintes valores de δ12:
δ12 = (2n+1)π∴ Imin ∝ (A1−A2)
2 (18.179)
O racio da intensidade maxima sobre a intensidade mınima e dada por:
R =Imax
Imin=
(A1 +A2)2
(A1−A2)2 =(A+2A)A−2A
=(3A)2
A2 = 9. (18.180)
Exemplo 15: A facilidade com que se calcula a soma de N ondas e notavel. Oravejamos. Consideremos a soma de N ondas, tendo cada onda um pequeno acrescimoda fase:
y1 = yo cos(ωt− kx)y2 = yo cos(ωt− kx+δ )
...yN = yo cos(ωt− kx+(N−1)δ )
(18.181)
O somatorio dessas ondas em representacao complexa e:
y = y1 + y2 + ...+ yN
= yoei(ωt−kx)[1+ eiδ + ...+ ei(N−1)δ ]
= yoei(ωt−kx) 1−eiNδ
1−eiδ = yoei(ωt−kx) eiNδ/2
eiδ/2(eiNδ/2−eiNδ/2)
eiδ/2−eiδ/2
= yoei(ωt−kx)ei(N−1)δ/2 sinNδ/2sinδ/2 = yo
sinNδ/2sinδ/2 ei(ωt−kx+(N−1)δ )
= yosinNδ/2sinδ/2 cos[ωt− kx+(N−1) δ
2 ].
(18.182)

410 18 Oscilacoes
Esta onda tem uma amplitude que depende da fase δ e do numero de ondas.Exemplo 16: Uma corda de harpa com 0.5 m de comprimento tem uma frequencia
fundamental de 800 Hz.a) Qual a velocidade de propagacao das vibracoes na corda?
v =√
Tµ= λν
ν = vλ= v
2l∴ v = 2lν = 800m/s
(18.183)
b) Qual a tensao na corda que produz essa frequencia, se a massa por unidade decomprimento da corda for 2×10−2 kg/m?
µ = 2×10−2kg/m⇒ T = µv2 = (2×10−2)(800m/s)2
T = 1.28×104N(18.184)
A massa total da corda e m = µl = 10 g.c) Qual o comprimento de onda da quarta harmonica?
νn =nv2l
⇒ ν4 =4v2l = 3.2×103Hz
⇒ λ4 =v
ν4= v2l
4v = l2
(18.185)
Podemos referir para efeitos de comparacao que, no ar, uma onda com a frequenciada quarta harmonica teria o comprimento de onda:
λ (ar) =vsom
ν4=
344m/s3200s−1 = 0.11m. (18.186)
Usamos a velocidade do som no ar em condicoes P.T.N. (25 0 C, 1 atm) que e cercade 344 m/s.
Exemplo 17: Um diapasao cuja frequencia de vibracao e de 300 Hz e usado paraafinar um violino. Pondo o diapasao a vibrar ao mesmo tempo que uma das cordasdo violino e excitada, ouvem-se batimentos com uma frequencia de 5 Hz.
a) Quais as frequencias possıveis para o som produzido pela corda?
fbat = f1− f2 = 5Hz (18.187)
As frequencias possıveis sao f = 295 Hz e f = 305 Hz.b) Como varia a frequencia do som produzido com a tensao feita na corda?Como f = n
2l
√Tµ
, concluiu-se que f ∝√
T .c) Aumentando a tensao na corda, a frequencia do batimento diminui, ficando
o violino quase afinado. A corda do violino estava a vibrar com uma frequenciainferior ou superior a do diapasao?
Aumentando T aumenta-se f . Tal significa que a corda estava a vibrar a 295 Hz.

18.2 Conceito de onda 411
18.2.4 Natureza das ondas sonoras
Uma onda sonora e produzida por uma vibracao. Forma-se entao uma onda lon-gitudinal que necessita de um meio para se propagar. No vacuo nao se propaga aonda sonora, que resulta de uma perturbacao das posicoes medias das moleculas (ouatomos que constituem o substrato). Na Fig. 18.14 mostra-se as curvas do desloca-mento das partıculas do meio onde se propaga o som, a pressao e a sua velocidade,supondo que a onda sonora se propaga no sentido de A para B.
Fig. 18.14 Curvas do deslocamento das moleculas, pressao e velocidade das partıculas que con-stituem o substrato.
A distancia de A a B e o comprimento de onda, enquanto que Cc e a amplitudedo deslocamento das partıculas da onda sonora, e D’d’ e a amplitude da variacaode pressao. Repare que nos pontos A e B o deslocamento das partıculas e zero, apressao e mınima e a velocidade e positiva no sentido de A para B.
A propagacao das vibracoes longitudinais produzem em cada elemento de vol-ume V a pressao p, uma dilatacao ou aumento relativo de volume θ dado por:
θ =∆VV
, (18.188)
acompanhada por uma sobrepressao ∆P = p (supoe-se que a pressao do meio nao epraticamente perturbada). A densidade (volumetrica) do fluido e
ρ =MV. (18.189)
AS VARIACOES DE PRESSAO E DENSIDADE SAO EXTREMAMENTE PEQUENASEM COMPARACAO COM OS VALORES DE EQUILIBRIO.
Designemos os valores nao perturbados 5 da pressao e densidade, respectiva-mente, por p0 e ρ0, e por P e ρ os mesmos valores na presenca de uma onda:
P = p0 + pρ = ρ0 +δ
(18.190)
onde se verifica:| p | p0, | δ | ρ0 (18.191)
Os fluidos perfeitos sao definidos por um coeficiente (ou modulo) de compress-ibilidade K:
K = ∆P =− 1V
∆Vδ p
(18.192)
que se pode reescrever na forma
5 Quando o meio esta em perfeito equilıbrio.

412 18 Oscilacoes
P = ∆ p =−1k
∆VV
=−Eθ , (18.193)
mostrando que a sobrepressao e a dilatacao sao proporcionais. O modulo de elasti-cidade volumetrico (ou ainda modulo de Young 6) e dado por
E =1K
=− ∆ p∆V/V
. (18.194)
Consideremos uma vibracao sinusoidal de amplitude e propagando-se num tubocom um gas de densidade massica ρ:
e = A.cos(ωt− kx). (18.195)
e(x, t) representa o deslocamento das partıculas de ar (ou outro fluido) na seccaotransversal 7 de coordenada x e no instante t. Consideremos um pequeno volume defluido V antes do deslocamento, compreendido entre as seccoes x e x+∆x:
V = S.[(x+∆x)− x] = S.∆x. (18.196)
Quando a onda sonora passa o seu volume (dilatado ou comprimido) passa a ser
V +∆V = S.[(x+∆x+ e(x+∆x, t))− (x+ e(x, t))]= S.[∆x+(e(x+∆x, t)− e(x, t))]
= S.∆x[1+ e(x+∆x,t)−e(x,t)∆x ]
≈ S.∆x(
1+ ∂e∂x
)∴ ∆V
V ≈∂e∂x
(18.197)
A velocidade instantanea de cada ponto do espaco e dada por
v =dxdt
= ωAsin(ωt− kx) = ωAcos(
ωt− kx+π
2
)= vm cos
(ωt− kx+
π
2
)(18.198)
ocorrendo tambem uma dilatacao local instantanea:
θ =∆VV
=dedx
=−kAcos(
ωt− kx+π
2
). (18.199)
Quando a onda progride pelo meio ocorre uma variacao de pressao
P =−Eθ = kEAcos(
ωt− kx+π
2
). (18.200)
A condensacao θ e a velocidade v sao sıncronas:
6 Demasiadas designacoes para uma mesma grandeza fısica...7 A onda sonora e uma onda transversal.

18.2 Conceito de onda 413
Pv=
EkAωA
=E2π
λ
2π
T
=Ecs, (18.201)
onde cs designa a velocidade (rapidez) do som. Como em qualquer tipo de fenomenooscilatorio, a energia cinetica ρv2/2 converte-se em energia potencial (e vice-versa).
Podemos aplicar a 2a Lei de Newton ao elemento de fluido ∆m = ρ∆V . Temos
∆m ∂ 2e∂ t2 =− ∂P
∂x ∆xS
ρ∆xS ∂ 2e∂ t2
ρ∂ 2e∂ t2 =− ∂P
∂x
⇒ E ∂θ
∂x = ρ∂ 2e∂ t2
E ∂ 2e∂x2 = ρ
∂ 2e∂ t2
∴ ∂ 2e∂ t2 = E
ρ
∂ 2e∂x2
(18.202)
A ultima equacao e uma equacao de propagacao de uma onda acustica propagando-se num meio fluido com a velocidade
cs =
√Eρ. (18.203)
Podemos concluir que a velocidade (rapidez) do som depende do coeficiente deelasticidade do meio. No ar a sua velocidade e cerca de 340 m/s e na agua e daordem dos 1500 m/s.
O unico tipo de elasticidade que se pode esperar de um gas e a elasticidade devolume porque um gas so reage significativamente a uma modificacao do seu vol-ume. A densidade de um gas e dada pela expressao:
ρ =MpRT
(18.204)
Esta e a lei de Boyle para a densidade de um gas ideal. R e a constante universal dosgases, p e a pressao, M e a massa molar, e T e a temperatura absoluta do gas.
O processo de compressao (e descompressao) da massa de ar e adiabatico, pV γ =Const. de modo que tambem se verifica
cs =
√γ pρ
=
√γRT
m. (18.205)
O comprimento de onda eλ = csT =
cs
f(18.206)
As ondas sonoras audıveis variam entre ∼ 20 Hz e ∼ 20 kHz. Visto que cs ≈ 340m/ conclui-se o comprimento das ondas sonoras varia entre ∼ 1.7 cm e ∼ 17 m.
Da Eq. 18.200, vemos que a amplitude maxima da onda de pressao e dada por

414 18 Oscilacoes
pm = kEA = ρc2s kA. (18.207)
A forca exercida pela onda numa camada fluida de area S e
F = p(x, t).S = pm.S.cos(
ωt− kx+π
2
)= pm.S sin(ωt− kx). (18.208)
A potencia instantanea e, por sua vez,
F∂e∂ t
= ωSpmesin2(ω− kx) (18.209)
A potencia media por unidade de area e o que se entende por intensidade I da onda:
I =1S< F
∂e∂ t
>=12
ω pme. (18.210)
Como ω = kcs, podemos reescrever
I =12
ρcsω2e2. (18.211)
A INTENSIDADE DA ONDA E PROPORCIONAL AO QUADRADO DO PRODUTODA FREQUENCIA PELA AMPLITUDE DA ONDA DE DESLOCAMENTO
Outra expressao alternativa e
I =12
p2m
ρcs(18.212)
A unidade em que se exprime e o W/m2.
18.2.4.1 Analogias electricas e acusticas
As analogias continuam aqui a ser muito uteis. A impedancia electrica e dada por
Z =VI
(18.213)
onde V e a tensao electrica e I a corrente. Em acustica temos
Za =pressao−acustica
velocidade, (18.214)
onde Za e a impedancia acustica que pode ser uma grandeza complexa:
Za = Ra + jXa, (18.215)
onde Ra e Xa sao as resistencia e reactancia acustica. Numa onda plana vimos que

18.2 Conceito de onda 415
P =Ecs
v = Rav (18.216)
sendo portanto a resistencia acustica pura igual a
Ra =Ecs
= ρcs, (18.217)
porque E = c2s ρ .
A impedancia acustica e de grande importancia na determinacao da transmissaoe reflexao acustica na fronteira entre dois meios caracterizados por impedanciasacusticas diferentes; na concepcao de transductores acusticos 8; na absorcao do somnum meio.
Exemplo 18: A impedancia acustica dos materiais e dada por Z = ρv, ρ sendo adensidade do meio e v a velocidade da onda acustica nesse meio.
18.2.4.2 Coeficientes de reflexao e transmissao
O som (ou qualquer outro tipo de onda: electrica, onda na superfıcie de umlıquido,...) pode ser reflectido ou/e transmitido na interface de dois meios comimpedancias acusticas diferentes, Z1 e Z2.
Designemos por Ii, Ir e It a intensidade incidente, reflectida e transmitida, respec-tivamente. Verifica-se necessariamente
Ii = Ir + It . (18.218)
A fraccao da intensidade transmitida e
t =ItIi
(18.219)
e a fraccao da intensidade reflectida e
r =Ir
Ir. (18.220)
Verifica-se necessariamenter = 1− t. (18.221)
Pode-se mostrar que quando ocorre uma incidencia normal a interface de separacaodos dois meios se verificam as relacoes:
r =(
Z1−Z2Z2+Z1
)2
t = 4Z1Z2(Z2+Z1)2
(18.222)
8 Podem converter uma tensao electrica em som ou vice-versa. O mais simples transductor acusticae o velho microfone de telefone com grao de carbono.

416 18 Oscilacoes
Exemplo 19: Verificamos que quando Z1 = Z2, tem-se r = 0, o que quer dizerque nao ha energia reflectida, toda a energia e transmitida t = 1 e diz-se que ha umaadaptacao perfeita das impedancias. A condicao Z1 = Z2 nao significa necessari-amente que os dois meios sao identicos. No caso das cordas vibrantes mostra-se queZ1 =
√T1ρ1 e Z2 =
√T2ρ2 e a igualdade pode ocorrer se se mudar as densidades e
as tensoes das cordas.Exemplo 20: A expressao obtida da fraccao de intensidade reflectida e transmi-
tida sao validas para qualquer tipo de onda-inclusive as ondas electromagneticas.Uma onda electromagnetica num dielectrico perfeito e dada por Z = 377/n Ω
(unidade de resistencia electrica). A Eq. 18.222 passa a escrever-se
r =(
n1−n2
n1 +n2
)2
(18.223)
Suponhamos que uma onda luminosa incide segundo a normal sobre uma superfıciede vidro de ındice de refraccao n2 = 1.5. Seja n1 = 1 (ar). Qual e a fraccao de energiareflectida?
r =(
1−1.51+1.5
)2
=1
25(18.224)
ou seja, e reflectida por uma superfıcie ar-vidro e de apenas 4 % da intensidadeincidente.

Chapter 19Aplicacao da Mecanica dos Fluidos
“I hold that the mark of a genuine idea is that its possibility can be proved, either a prioriby conceiving its cause or reason, or a posteriori when experience teaches us that it is infact in nature.”
- Leibniz, 1670
“Indeed in general I hold that there is nothing truer than happiness, and nothing happierand sweeter than truth.”
- Leibniz, 1670
19.1 Aplicacoes da mecanica dos fluidos
Exemplo 1: Tubo de Pitot: Trata-se de um dispositivo para medir a velocidade numfluido em movimento. A presenca de um aerofolio altera as linhas de corrente (oufiletes) e no ponto O a fluido atinge praticamente a velocidade igual a zero, v0,chamando-se a tal ponto um ponto de estagnacao. No ponto A a velocidade deescoamento e suponhamos v, sendo a pressao em O, p0 (tambem chamada pressaoaerodinamica 1). A equacao de Bernoulli da-nos
p0 = p+12
ρv2 (19.1)
onde ρ e a densidade do ar. O manometro diferencial acoplado ao aerofolio 2, talcomo esta mostrado na Fig. 19.1 mede p− p0. Se ρ0 e a densidade do fluido no tuboem forma de U e h a diferenca de nıvel entre os dois ramos, verifica-se
1 Expressao que se aplica no caso dos fluidos compressıveis, como eo caso do ar. Nos lıquidosfala-se de pressao hidrodinamica.2 Um aerofolio e uma seccao bidimensional concebida para modificar a direccao e a magnitude davelocidade do fluido que sobre ela escoa.
417

418 19 Aplicacao da Mecanica dos Fluidos
p0− p = ρogh =12
ρv2. (19.2)
Desta expressao obtem-se a velocidade do fluido escoando sobre o aerofolio:
v =√
2ρ0
ρgh, (19.3)
consistindo num metodo usual para medir a velocidade relative duma aeronave rel-ativamente ao ar com uma incerteza de cerca de 1%.
Fig. 19.1 (a) - Tubo de Pitot instalado sobre um aerofolio; (b) - Tubo de Venturi.
Exemplo 2: Tubo de Venturi. O princıpio do tubo de Venturi esta ilustrado naFig. 19.1-(b). Usa-se este aparelho para medir o escoamento de fluidos em tubos econsiste numa contraccao conica em B que parte do ponto A, seguida de uma novaabertura ate a seccao inicial em C. Para preservar o fluxo das linhas de correnteconvem que a abertura de B para C seja gradual. Um manomtero de mercurio emforma de tubo em U liga as aberturas de A a B. O teorema de Bernoulli da-nos
pA
ρ+
12
v2A =
pB
ρ+
12
ρv2B. (19.4)
Sejam SA e SB as areas das seccoes transversais em A e B. A equacao da continuidadeda-nos
ρvASA = ρvBSB (a)
∴ vA =√
2(pA−pB)
ρ(S2A
S2B−1)
(b) (19.5)
Observa-se a diferenca pA− pB e deduz-se a velocidade por meio da Eq. 19.5-(b).Se ρm for a densidade do mercurio no tubo-U e h a diferenca de nıvel nos dois ramosdo manometro, a formula transforma-se em
vA =
√√√√ 2ghρm
ρ(S2
AS2
B−1)
= K√
h (19.6)
onde K e uma constante do aparelho de Venturi.
19.1.1 O coeficiente de contraccao
Seja AB um pequeno orifıcio numa parede de um recipiente, suposto cheio, e seja ha profundidade a que se encontra o orifıcio abaixo da superfıcie. Seja Π a pressao

19.1 Aplicacoes da mecanica dos fluidos 419
atmosferica e v a velocidade de escoamento no orifıcio. Seja A′B′ a projeccao daarea do orifıcio na parede oposta, supondo ambas as paredes verticais.
Se a pressao hidrostatica em AB for p quando orifıcio esta fechado, a accao de ABe A′B′ no fluido consiste em duas forcas iguais e opostas pσ1. Por sua vez, quando oorifıcio esta aberto a forca pσ1 em AB passa a ser Πσ1. Se admitirmos que a pressaohidrostatica permanece igual em primeira aproximacao em A′B′, excepto em AB, ofluido e acelerado atraves do orifıcio pela forca (p−Π)σ1. Portanto, devemos ter
F = dmdt v
F = (ρσ2v)v(p−Π)σ1 = σ2ρv2
(19.7)
Aplicando o teorema de Bernoulli a uma linha de corrente (horizontal), tem-se
pρ= Π
ρ+ 1
2 v2
∴ σ2 =12 σ1.
(19.8)
Ou seja, o orifıcio em AB apresenta uma seccao “contraıda” de um factor 1/2. Aseccao contraıda chama-se vena contracta, porque o fluxo de lıquido aparece naouniforme. E nesse ponto que as linhas de corrente passam a ser de facto paralelas;antes desse ponto as linhas de corrente ainda estao a convergir. Se colocarmos umtubo de escoamento projectado para o interior, tal como o mostra a Fig. 19.2-(b1), ashipoteses admitidas anteriormente sao ainda aproximadamente validas, e σ2 =
12 σ1.
A experiencia mostrou que no caso de se colocar um tubo de escoamento projec-tado para o exterior da cisterna, chamado de adjutor, tal como esta na Fig. 19.2-(b2),entao o fluxo aumentara, aumentando a velocidade do fluido, pois que a vena con-tracta se situara no exterior e teremos em seu lugar os seguintes calculos:
pσ1−Πσ2 = σ2ρv2
∴ σ2σ2
= 12
p−σ2Π/σ1p−Π
.(19.9)
Neste caso, σ2/σ1 > 1/2. Or Romanos conheciam estes factos por observacao eusavam estas tecnicas na distrbuicao de agua.
Fig. 19.2 Vena contracta.

420 19 Aplicacao da Mecanica dos Fluidos
19.1.2 Circulacao
O conceito de circulacao e de grande importancia na caracterizacao do movimentode um fluido. Seja Γ uma curva fechada orientada 3 situada inteiramente no fluidoem movimento. Seja −→v a velocidade de um ponto arbitrario P da curva e d
−→l o
vector deslocamento elementar orientado no sentido positivo do percurso ao longode Γ . Chama-se circulacao Cr ao longo de Γ ao integral de linha
CΓ =∮
Γ
(−→v ·d−→l ). (19.10)
Exemplo 3: Seja um recipiente cilındrico contendo um lıquido em rotacao comvelocidade angular uniforme ω . O lıquido roda como um corpo rıgido e a velocidadede um ponto generico P a distancia r do eixo de rotacao tera a velocidade
−→v = ωr−→u θ . (19.11)
Como d−→l = rdθ
−→u θ , obtemos
CΓ = ωr2∮
Γ
dθ=2πrv = 2πr2
ω. (19.12)
A circulacao sobre um cırculo de raio r aumenta com r2.Exemplo 4: Consideremos um outro tipo de escoamento em que se admite que
a circulacao CΓ e constante sobre qualquer cırculo de raio r com centro no eixo derotacao Oz. De acordo com a Eq. 19.12, temos
v =CΓ
2πr. (19.13)
O teorema de Bernoulli da-nos
z+v2
2g= z+
C2Γ
8π2gr2 =Const.= A (19.14)
donde resulta a equacao da superfıcie livre do lıquido
z = A− Br2 (19.15)
onde B=C2Γ/8π2g. Estas consideracoes sao de grande importancia na hidrodinamica
da meteorologia.Exemplo 5: Um furacao consiste num vortice com um nucleo de raio aproxi-
madamente 30 metros. Com varia a pressao no solo em torno do nucelo? Supondoque a velocidade maxima do vento igual a 160 km/h, qual e a queda maxima dapressao? Este decrescimo acentuado da pressao quando comparada a pressao at-
3 Para a qual e definida um sentido positivo do percurso.

19.1 Aplicacoes da mecanica dos fluidos 421
mosferica normal provoca a destruicao de casas, arrancando os tectos e atirando osdestrocos numa espiral.
Ja vimos que a velocidade azimutal vθ =CΓ /2πr. Pelo teorema de Bernoulli
p− p0 =−12
ρv2 =−0.5×1.293× (160×103/3600)2 (19.16)
Pode-se mostrar que a circulacao e dada por
CΓ = 2ωS (19.17)
onde S e a area contida pela curva Γ .Se o escoamento por unidade de area se anula numa dada regiao, diz-se que o
escoamento e irrotacional nessa regiao. Como neste caso se tem
CΓ =∮
Γ
(−→v ·d−→l ) = 0, (19.18)
tal implica que existe uma funcao φ , tal que
−→v =−−→gradφ . (19.19)
A funcao φ chama-se potencial de velocidades. Por este motivo, um escoamentoirrotacional e chamado de escoamento potencial.
Se CΓ 6= 0 diz-se que o escoamento e rotacional. No escoamento rotacional umelemento do fluido possui momento angular pois que roda ao mesmo tempo que etransportado pelo movimento do fluido.
Exemplo 6: [Exame da Universidade de Chicago] Um hangar de aeronaves(Fig. 19.3) tem a forma semi-cilindrica com comprimento L e raio R esta expostodirectamente ao vento que sopra perpendicular ao eixo com velocidade no infinito(isto e, a grande distancia do hangar) igual a v∞. Qual e a forca exercida sobre ohangar no caso de a porta, localizada em A, estiver aberta? O potencial de veloci-dades e dada por
φ =−v∞(r+R2
r)cosθ . (19.20)
Fig. 19.3 Hangar de aeronaves sujeito ao escoamento de ar.
QuadroNegro 1

422 19 Aplicacao da Mecanica dos Fluidos
19.1.3 Efeito Magnus
Quando um objecto esta animado com um movimento de rotacao num fluido emmovimento, produz-se uma ssimetria nas linhas de circulacao do fluido em torno doobjecto. Com a rotacao do objecto e devido a viscosidade do fluido, as diversas ca-madas do fluido entram em rotacao com a velocidade angular −→ω criando uma novadistribuicao das linhas de corrente, como se mostra na Fig. 19.4. Em baixo as ve-locidades subtraem-se, aumentando a pressao, enquanto em cime ocorre o contrario,aumentando a velocidade do fluido e a consequente queda de pressao. A resultantedas forcas e um empuxo dinamico vertical
−→E dirigido para cima.
Este efeito foi descrito por Heinrich Magnus em 1853.O empuxo dinamico e dado pela formula de Joukovsky-Kutta:
E =−ρv∞CΓ , (19.21)
em unidades N/m.Exemplo 7: O cilindro de diametro igual a 2.5 cm gira no sentido dos ponteiros
do relogio, como na Fig. 19.4, com 3600 rpm no ar nas condicoes PTN, sendo avelocidade do fluido no infinito v∞ = 30.5 m/s. Estimar o empuxo dinamico emN/m.
Admita-se que
CΓ =∮(−→v ·d
−→l ) =
∫ 2π
0(−rω)rdθ =−2πr2
ω, (19.22)
donde resulta queE =−ρv∞CΓ = (19.23)
Fig. 19.4 Efeito Magnus (as linhas de corrente estao muito deformadas na figura).
Em muitos desportos usa-se este efeito produzindo-se um movimento curvo dasbolas de tenis, futebol ou de pingue-pongue. Flettner em 1920 propos a utilizacaodeste efeito para propulsao de navios pelo vento.
19.1.4 Viscosidade
A viscosidade e uma forca volumetrica de atrito interno que surge no deslizamentodas camadas fluidas umas sobre as outras, o que origina tensoes tangenciais. Todo ofluido real possui a propriedade de viscosidade. A viscosidade e parcialmente umadas causas da resistencia ao escoamento de um fluido numa conduta, canais e nomovimento de um corpo num fluido. As forcas que se exercem entre as camdas tan-

19.1 Aplicacoes da mecanica dos fluidos 423
gentes a direccao do movimento podem ser determinadas pela formula de Newton:
FA= η
dvdy
(19.24)
o que siginifica queA TENSAO E PROPORCIONAL A TAXA DE VARIACAO ESPACIAL DA VELOCI-
DADE.A constante η e o coeficiente de viscosidade do fluido, cuja unidade e o N.s/m2.
Na pratica usa-se a unidade centipoise (cp):
1cp = 10−2 poise = 10−3N.s/m2.
Consideremos em regime estacionario o escoamento de um fluido num tubo cilin-drico de raio a e comprimento L sob a accao de uma diferenca de pressao p1− p2.Sob um cilindro imaginario de raio generico r a forca exercida e (p1− p2)πr2. Oraa area da superfıcie lateral e 2πrL. Logo, a tensao tangencial distribuıda sobre essasuperfıcie e
QuadroNegro 2
Obtemos a distribuicao parabolica das velocidades num tubo cilindrico:
v(r) =(p1− p2)
4Lη(a2− r2). (19.25)

424 19 Aplicacao da Mecanica dos Fluidos
19.1.5 Ondas de gravidade
Ondas de gravidade sao geradas num meio fluido ou na interface de entre dois meios,por exemplo a atmosfera e o oceano. A forca restauradora ea gravidade ou a im-pulsao de Arquimedes.
Quando um elemento do fluido e deslocado numa interface ou internamente parauma regiao de diferente densidade, a forca gravıtica tende a restaurar o equilıbrio re-sultando numa oscilacao em torno do equilıbrio. Ondas de gravidade numa interfacear-oceano sao chamadas de ondas gravıticas de superfıcie ou ondas de superfıcie en-quanto que ondas gravıticas internas sao chamadas de ondas internas. Exemplos deondas gravıticas sao as ondas geradas pelo vento, tsunamis e ondas oceanicas.
Exemplo 8: Uma massa de ar a temperatura de T = 280 K esta separada por umplano horizontal de uma massa de ar a temperatura T = 300 K localizada por cima.Assuma a presenca de ondas gravitacionais de comprimento de onda λ e de pequenaamplitudem gerando uma onda sinusoidal na interface de separacao dos dois meios.Trate as oscilacoes da massa de ar como incompressıvel.
Sejam ρ1 e ρ2 as densidades do meio superior e inferior, respectivamente. Con-siderando as oscilacoes incompressıveis significa que ∇2 p = 0 em todos os pontosdo espaco. A interface e supostamente perturbada por uma onda sinusoidale, do tipoη = α sin(ωt− kx) propagando-se ao longo de x.
Vamos supor que a pressao em cada uma das duas regioes, abaixo e acimada interface, e ligeiramente perturbada pelas oscilacoes do seu valor estatico (deequilıbrio na ausencia da onda) e que essa perturbacao se atenua exponencialmentea partir da interface (porque?):
p1 =−ρ1gz+β1 exp[−kz]sin(ωt− kx)p2 =−ρ2gz+β2 exp[kz]sin(ωt− kx) (19.26)
O valor das amplitudes β1 e β2 tendem para zero quando η tende para zero, como eexpectavel.
Temos que impor as seguintes condicoes de contorno:
p1 = p2,em : z = η . (19.27)
A equacao de Euler escreve-se
ρ∂−→v
∂ t=−−→∇ p. (19.28)
Ou seja, devemos resolverρ1η =− ∂ p1
∂ zρ2η =− ∂ p2
∂ z
(19.29)
QuadroNegro 2

19.1 Aplicacoes da mecanica dos fluidos 425
Fig. 19.5 (a)-“Ondas mostras” ou “Freak waves” engulindo um navio em alto mar; (b) - ondas degravidade na atmosfera.


Chapter 20Teoria da Relatividade Restrita
“And I think that you too would call it propaganda when people are enticed into a change ofopinion by promises of pleasure, or terrified into it by threats? Yes, propaganda and deceitalways go together.”
- Platao, em a Republica
“I soon learned to scent out what was able to lead to fundamentals and to turn aside fromeverything else, from the multitude of things that clutter up the mind.”
- Albert Einstein
20.1 Teoria da Relatividade Restrita
A missao do professor nao deve restringir-se unicamente a transmitir conhecimento,mas sobretudo transmitir a arte da aquisicao de conhecimentos, a arte da descoberta.A teoria da relatividade, tal como Einstein, Lorentz e Poicare nos transmitiram,convida-nos a abandonar ideias antigas sobre o espaco, tempo e movimento. O prob-lema da relatividade surge no trabalho de Newton. As descobertas de Galileu, Ke-pler e Huyghens levaram-nos a uma teoria do movimento compreensiva. Para queuma teoria da relatividade possa ser formulada e necessario definir o que se entendepor movimento, de modo a que um observador possa decidir se um dado corpo seencontra em movimento ou nao.
As leis da Fısica necessitam de um sistema de coordenadas no espaco (ou de umreferencial) de modo a poderem ser formuladas matematicamente. Se considerarmosdois referenciais em movimento um em relacao ao outro, poderıamos esperar que asleis da fısica observadas num ou noutro referencial fossem diferentes; poderıamosesperar tambem que a forma mais simplificada das leis fısicas se apresentasse noreferencial que se encontra “em repouso”. Porem, saber ao certo qual o sistema decoordenadas que se encontra “em repouso” tem representado historicamente umaconsideravel dificuldade intelectual.
427

428 20 Teoria da Relatividade Restrita
Newton resolveu o problema a sua maneira, adoptando a hipotese do espacoabsoluto. Ele sugeriu que as estrelas “fixas” fora do sistema solar (e aparentementenao perturbadas pelo seu movimento) poderiam ser usadas para definir o espacoabsoluto.
Na Mecanica Newtoniana usamos as transformacoes de Galileu para passarmosde um referencial de inercia para outro. Porem, existem eventos e fenomenos quenao podem ser descritos por este tipo de transformacoes. Por exemplo, imagine queviaja numa nave que se move com a velocidade v = 3c/4 em relacao ao solo. A navedispara um raio laser para a direita. Qual e a velocidade do raio de luz na perspectivade um observador que esta no solo (Fig. 20.1)? Se for utilizada a transformacao deGalileu, obtemos
vx = v′x +V= c+ 3
4 c = 74 c
(20.1)
praticamente o dobro da velocidade da luz. Se o feixe de luz for direcionado nosentido -x, terıamos
vx =−c+34
c =14
c, (20.2)
o que significa que a luz se apresentaria mais lenta. Na verdade, esta analise estaincorrecta.
Fig. 20.1 Observador em Terra, referencial Oxy, e nave donde e disparado um feixe de raios laser,referencial O’x’y’.
As transformacoes de Galileu sao unicamente validas para baixas velocidadesdos objectos quando comparadas com a velocidade da luz (v c). Elas admitemuma “relatividade” em relacao ao observador das medidas das coordenadas espaci-ais e temporais, das distancias entre dois pontos materiais, implicando assim que asvelocidades relativas e as aceleracoes sao invariantes pela transformacao de coorde-nadas de um referencial de inercia para um outro referencial de inercia com movi-mento uniforme relativo. Destas invariancias das aceleracoes resultam expressoesidenticas do Princıpio fundamental da dinamica,
−→F = m−→a .
Destas invariancias resulta a impossibilidade de determinar por meio de proces-sos mecanicos se um dado sistema (por exemplo, o laboratorio onde se executa umaexperiencia dada) se encontra em repouso absoluto ou em movimento rectilıneo euniforme. Os princıpios enunciados por Newton pressupoem um espaco absoluto eum tempo absoluto e o movimento dos corpos em relacao a esse espaco absoluto.
20.1.1 As inconsisteencias entre o eletromagnetismo e a mecanica
A teoria ondulatoria da luz, desenvolvida por Young apresentava a luz como umaonda, sujeita aos efeitos de interferencia, difraccao, polarizacao,...A luz apresenta

20.1 Teoria da Relatividade Restrita 429
caracterısticas analogas as que sao evidenciadas nos processos ondulatorios. Porexemplo, o som precisa de um meio material para se propagar, o ar. Consequente-mente, foi com naturalidade que se supos que a luz necessita igualmente de ummeio, historicamente denominado o eter luminıfero, tudo levando a crer que a rapi-dez da luz atraves desse meio deva ser independente da velocidade da fonte que aproduz.
Mas, se esse hipotetico meio existe, devera haver uma maneira de detectar omovimento atraves dele. Duas experiencias ficaram celebres pela sua tentativa dedeterminar a velocidade “absoluta” da Terra em relacao ao “eter”: o fenomenoda “aberracao estelar” estudada por James Bradley (1726) e a experiencia deMichelson-Morley.
20.1.2 Reflexoes sobre o tempo e o espaco nos finais do seculo XIXe inıcio do XX
A filosofia mostra-nos que o que vemos a nossa volta nao e o mundo real 1
A cultura Europeia nos finais do Sec. XIX e inıcio do Sec. XX estava recep-tiva a novas ideias sobre o espaco e o tempo, impressionistas como Picasso que-bravam a perspectiva convencional. Ciencia e Arte interagiam constructivamente.A famosıssima peca de teatro de Samuel Beckett “Waiting for Godot” explora anossa percepcao do tempo: as nossas sensacoes e pensamento. Em 1895, H. G.Wells escreve aquela que se julga ser a primeira obra de ficcao cientıfica “The TimeMachine”, explorando o conceito de viagem no tempo.
Fig. 20.2 Algumas figuras ilustres da ciencia no Sec. XX e quadro de Picasso.
Ate cerca de 1880 muitos relogios das povoacoes eram acertados ao meio-dia.Com o advento dos comboios surgiu a necessidade do passageiro poder aceder a umrelogio-padrao. Ao fim e ao cabo os relogios mecanicos facilmente podem atrasar-seou adiantar-se. Surgiu assim o problema tecnico da sincronia dos relogios.
PARA FALARMOS DO TEMPO TEMOS QUE SINCRONIZAR OS RELOGIOS.O problema da sincronizacao dos relogios tornou-se um problema central das
companhias rodoviarias, dos governos, dos militares.Em 1883, delegados de 27 nacoes encontram-se em Washington, D.C., numa
conferencia para estabelecer o tempo mundial. Acordaram num sistema semelhanteao actual, dividindo o planeta em fusos horarios 2, divididos por 24 meridianospadrao de longitude, separados por 150, com partida em Greenwich, Inglaterra. To-
1 Em Immanuel Kant sera a coisa em si, isto e, aquilo que existe para la da experiencia humana enao pode ser objecto de conhecimento.2 “Time zones”, em ingles.

430 20 Teoria da Relatividade Restrita
dos os fusos horarios encontram-se a frente ou atras uma hora, sendo que em algunsmeia-hora.
Nos Estados Unidos, todos os relogios sao sincronizados com a ajuda de com-putadores, radios e antenas, em Fort Collins, que transmitem o tempo preciso paratodo o paıs, pois e de vital importaancia nos mercados de valores (stock market) esinais de transito.
20.1.3 Experiencias de Michelson-Morley
A experiencia de Michelson e Morley e uma das experiencias mais importantes (edas mais famosas) na historia da fısica. Ela foi realizada durante o ano de 1887por Albert Michelson (que acabou por receber o premio Nobel em 1907 por essetrabalho) e Edward Morley, na que e hoje a “Case Western Reserve University”.E considerada como a primeira evidencia experimental contra a teoria do “eter lu-minıfero”.
Referimos que a propagacao das ondas sonoras ocorre num meio fluido ou solido.Em particular, nos metais as ondas sonoras atingem valores mais elevados, tipica-mente 5000 m/s, aumentando com o valor das “constantes elasticas” entre atomosvizinhos. A velocidade do som vs depende das propriedades do meio, podendo pare-cer maior ou menor conforme o meio em que se propaga se aproxima ou se afastado observador. En analogia com este bem conhecido fenomeno, Maxwell acreditavaque a velocidade da luz tambem teria um valor diferente quando medida num lab-oratorio terrestre devido ao seu movimento em redor do Sol atravessando o eter avelocidade de 3×104 m/s.
Apesar da analogia com as ondas sonoras, que consistem em movimentos decompressao e rarefaccao longitudinal dum fluido, a perturbacao ondulatoria denatureza electromagnetica tem um caracter diferente, consistindo em oscilacoestransversais periodicas no espaco e propagando-se atraves dele (Fig. 20.3).
Fig. 20.3 Caracterısticas de uma onda electromagnetica propagando-se no espaco.
Considere agora um feixe de luz propagando-se atraves do hipotetico eter, quepreenche o espaco inteiro. A Terra supostamente move-se atraves do eter com ve-locidade v. Portanto, todo o observador em movimento no eter, devera estar sujeitoa um vento de eter. Michelson imaginou um aparelho de grande sensibilidade, uminterferometro, capaz de medir o movimento da Terra atraves deste eter.
Imaginemos que a luz descreve um trajecto de ida e volta: A→ B→ A, descritoentre entre dois pontos AB separados pela distancia L (Fig. 20.4).
Fig. 20.4 Trajecto de ida e volta descrito pela luz.

20.1 Teoria da Relatividade Restrita 431
Suponhamos que o conjunto AB (braco do interferometro) move-se para a direitaatraves do eter com velocidade v (Fig. 20.4-(a)). Por simetria, podemos supor queo eter se move para a esquerda com a mesma velocidade. Quando o feixe de luz sepropaga para a direita, a sua velocidade e c− v, enquanto que sera c+ v quando ofeixe se propaga para a esquerda (Fig. 20.4-(b)). Podemos pois assim determinar ostempos de transito seguintes:
tempo de transito A→ B : t1 = Lc−v
tempo de transito B→ A : t2 = Lc+v
Se o aparelho estivesse em repouso, v = 0 : to = Lc
O movimento de translaccao da Terra provoca um atraso no retorno do feixe de luz∆ t, que se estima assim:
∆ t = t1 + t2−2to= L
c−v +L
c+v −2Lc
= Lc
[1
1−v/c +1
1+v/c −2]
= 2Lc
[1
1−v2/c2−1
]' 2L
cv2
c2
(20.3)
A orbita terrestre corresponde a v/c = 10−4, e se suposermos como valor razoavel,como dimensao tıpica de um aparato experimental, L = 1 m, obtemos ∆ t = 2×1/(3× 108)× 10−8 ≈ 7× 10−7 s, na verdade um valor excessivamente pequenopara ser mensuravel. Porem, Michelson nao se desencorajou, imaginando em 1881a seguinte solucao.
A luz provinda de uma fonte luminosa e dividida em dois feixes por meio de umespelho semi-transparente 3 colocado em M, como ilustra a Fig. 20.5-(a).
Fig. 20.5 (a) Versao simplificada do interferometro de Michelson mostrando o feixe provindo dafonte S dividido em dois feixes por um espelho semi-transparente M. Os feixes sao reflectidos pelosespelhos M1 e M2, retornando ao espelho semi-transparente. Os feixes sao depois transmitidos aotelescopio T onde interferem, dando como resultado um padrao de franjas de interferencia. NaFigura −→v e a suposta velocidade do eter relativamente ao interferometro.
Metade do feixe propaga-se ate ao espelho M1 antes de ser reflectida de volta aoespelho M e depois ate ao observador.
A outra medade do feixe e desviado para o segundo braco do interferometroatingindo o espelho M2, sendo reflectido de volta para o observador.
O observador vera um padrao de interferencias resultando da subreposicao dosdois feixes e que dependera do atraso temporal ∆ t entre ambos.
Se ∆ t = 0, o que corresponde a um numero inteiro de o observador vera umafranja brilhante.
3 Em ingles, “beam-splitter”.

432 20 Teoria da Relatividade Restrita
Se ∆ t = T/2, o que corresponde a exactamente metade de um ciclo, as ondaschegam ao observador em oposicao de fase (180o) e cancelam-se uma a outra. Oobservador tera o campo de visao obscurecido.
Fig. 20.6 (a) Sobreposicao de ondas em fase: maximo de intensidade; (b) Sobreposicao de ondasem oposicao de fase: mınimo de intensidade.
Medidas precisas e cuidadosas permitem medir variacoes da ordem dos λ/100,fazendo de Michelson um precursor no campo das medidas de alta precisao.
Alinhando o interferometro de modo que M→M1 esteja orientado ao longo davelocidade da Terra, verifica-se que o tempo de percurso de ida e volta do feixe deluz dispendido no trajecto M→M1 e:
T1 =L
c−v +L
c+v
= Lc
[1
1−v/c +1
1+v/c
]= 2L
c1
1−v2/c2
' 2Lc
[1+ v2
c2
],
(20.4)
onde L e o comprimento do braco AM1 do interferometro (Fig. 20.7).
Fig. 20.7 O interferometro esta orientado de modo que um dos seus bracos esta orientado ao longoda direccao do movimento da Terra.
Ocorre igualmente um atraso no braco-2. O espelho M2 move-se para a direita ea luz deve propagar-se no trajecto mostrado na Fig. 20.8.
Fig. 20.8 Trajecto curvo em direccao ao espelho M2.
Seja τ o tempo de percurso do feixe de luz (ou da frente de onda) dispendido notrajecto M→M2. A distancia percorrida pelo feixe de luz e calculado sem dificul-dade:
L′ =√
L2 + v2τ2
L′ = cτ
τ =
√L2+v2τ2
c∴ τ = L
c1√
1−v2/c2.
(20.5)
O tempo total para a luz viajar do espelho A ate M2 e voltar ao ponto de partidae:

20.1 Teoria da Relatividade Restrita 433
T2 = 2τ = 2Lc
1√1−v2/c2
T2 ' 2Lc
(1+ 1
2v2
c2
)⇒ ∆T = T1−T2 =
Lc
v2
c2
(20.6)
onde ∆T representa o atraso temporal devido ao movimento de translaccao da Terra.Como e evidente, torna-se muito difıcil construir na pratica um interferometro
com dois bracos exactamente iguais.Michelson teve a ideia engenhosa de rodar de 90o os bracos do seu inter-
ferometro. Assim, o atraso temporal total devera ser 2∆T , e o deslocamento dopadrao das franjas e rapidamente calculado.
Se a diferenca de percurso dos dois feixes e um numero integral de comprimentosde onda λ , a interferencia e construtiva. Se um dos espelhos se desloca de meio-comprimento de onda λ/2, a distancia percorrida pela luz nesse braco varia nototal de λ e o padrao de interferencia atinge um maximo, desde que δ = mλ . Esseincremento eventual de λ num dos bracos, corresponde ao deslocamento de umafranja. No total passarao ∆N franjas se o deslocamento total do espelho for de δ
δ = ∆nλ . (20.7)
Assim, ao rodar os bracos do iterferometro de 90o o atraso temporal total e 2∆T ,dando origem ao deslocamento de N franjas no padrao de interferencias dos doisfeixes:
∆N =δ
λ=
2∆T cλ
=2Lλ
v2
c2 . (20.8)
Apesar de todo o cuidado e complexidade da experiencia nao foi detectado qual-quer deslocamento das franjas de interferencia, isto e, a velocidade de propagacaoda luz e a mesma em todas as direccoes, nao se podendo demonstrar a existencia deum eter em repouso, logo nao fazendo sentido supo-lo existente.
Exemplo 1: Seja um interferometro de Michelson-Morley cujos bracos tem ocomprimento de 10 m cada um, um deles estando orientado ao longo do movimentoque a Terra supostamente faz atraves do eter. Supondo que a velocidade da Terraatraves do eter e igual a sua velocidade orbital v = 10−4c, calcule a diferenca detempo de percurso ao longo dos bracos do interferometro dos dois feixes luminosos.
Vimos anteriormente que
∆T ≈ Lc
v2
c2 =2(10−4c)2
(3×108)c2 = 3.33×10−16s (20.9)
Exemplo 2: O interferometro usado por Michelson e Morley tinha bracos de11 m e usava a luz de uma lampada de sodio emitindo no comprimento de ondaλ = 5900 A. Esta aparelhagem teria permitido observar um deslocamento de 0.005franjas. Qual e o limite superior da velocidade da Terra atraves do eter que esteinterferometro permite detectar? (Suponha o comprimento dos bracos iguais).
O numero de franjas que podemos observar a desfilar no retıculo e dado por

434 20 Teoria da Relatividade Restrita
∆N = v2
c2λ(2L) = 2Lv2
λc2
0.005 = 2(11)v2
(5900×10−10m)(3×108m/s)2
∴ v = 3.47×103m/s.
(20.10)
Como a velocidade orbital da Terra e v = 3× 104 m/s, o interferometro usado eraperfeitamente sensıvel para detectar o movimento atraves do eter. Porem, Michelsone Morley reclamaram ter sido impossıvel detectar tal movimento.
20.1.4 As solucoes propostas por Lorentz e Poincare
Hendrik Lorentz na sua obra intitulada “Theory of electrons”, propos uma teoriahoje chamada “Teoria do Eter de Lorentz” (TEL) e que constitui o desenvolvimentofinal das teorias classicas do eter muito em voga nos finais do Sec. XIX e inıcio doSec. XX.
O matematico e fısico frances Henri Poincare desenvolveu essa teoria, quenomeou de “Nova Mecanica”. O aspecto caracterıstico fundamental destas novasteorias reside na explicacao da impossibilidade de se detectar qualquer movimentorelativo ao eter imovel, com a introducao das transformacoes de Lorentz.
Estas teorias foram desenvolvidas entre 1892 e 1906, baseando-se na teoriado eter de Augustin-Jean Fresnel, nas equacoes de Maxwell do campo electro-magnetico e na teoria do electrao de Rudolf Clausius.
Uma das caracterısticas mais salientes introduzidas por Lorentz na sua teoriafoi a separacao entre materia (em especial os electroes supostos os portadores do“fluido electrico”) e o eter, suposto completamente imovel e nao susceptıvel de serarrastado pela materia. De acordo com estas teorias, o estado fısico do eter pode serdescrito pelo campo electrico
−→E e o campo de excitacao magnetico
−→H . Com esta
nova abordagem, o eter electromagnetico substitui os velhos modelos mecanısticosdo eter.
Como se pode depreender, muitos aspectos da Teoria da Relatividade Especialde Einstein (TREE) contem a Teoria de Lorentz-Poicare.
Os efeitos da contraccao dos comprimentos ou da dilatacao do tempo sao referi-dos a um referencial “preferido” (o eter) e nao e possıvel distinguir-se a TREE daTEL. A diferenca fundamental entre a TREE e a TEL esta em que a TEL assume-se a impossibilidade de se detectar o eter (sendo todo o movimento relativo a esseespaco absoluto agora apelidado de eter) e a validade do princıpio da relatividade eapenas pura coincidencia, enquanto que a TREE assume que o eter e superfluo poisque nao existem meios de se detectar o movimento em relacao a ele.
Exemplo: Meio transparente em movimento Considere um tubo flexıvel demassa M por unidade de comprimento, sujeito a uma extensao longitudinal ao longodo eixo Ox devido a accao de uma tensao T . O tubo esta preenchido por um lıquidode densidade linear de massa m. Considere a propagacao de ondas de deslocamentotransversais ao longo do eixo Oy no tubo e no lıquido que esta no seu interior. Agora

20.1 Teoria da Relatividade Restrita 435
faca as consideracoes gerais que usamos aquando do estudo das ondas nas cordasvibrantes (a tensao e a mesma em todo o lado; a curvatura da corda e aproximada-mente proporcional a segunda derivada; etc).
Seja c a velocidade das ondas ao longo do tubo vazio; quando o tubo contemlıquido a velocidade das ondas passa a ser c/n quando o lıquido se encontra esta-cionario el relacao ao tubo. Seja u a velocidade das ondas quando o tubo se encontraem movimento com velocidade v em relacao a um referencial fixo. Para simplificar,podemos assumir que v e pequeno, de modo que iremos desprezar todas as quanti-dades siguais ou superiores a v2.
a) Supondo que o tubo se encontra acelerado com ∂ 2y/∂ t2, qual e a aceleracaodo lıquido. Use a derivada convectiva.(
∂
∂ t+ v
∂
∂x
)2
y≈ ∂ 2y∂ t2 +2v
∂ 2y∂x∂ t
. (20.11)
b) Calcule a aceleracao a esta sujeito um elemento de comprimento dx.[(M+m)
∂ 2y∂ t2 +2mv
∂ 2y∂ t∂x
]dx. (20.12)
c) Aplique a equacao fundamental da dinamica a este elemento da estrutura decomprimento dx (reveja o calculo que foi feito aquando do estudo das cordas vi-brantes).
(M+m)∂ 2y∂ t2 +2mv
∂ 2y∂x∂ t
= T∂ 2y∂x2 . (20.13)
d) Suponha que as ondas que se propagam sao do tipo sinusoidal sink(ut− x).Insira na Eq. 20.13 e mostre que
u2(M+m)−2muv−T = 0. (20.14)
e) Resolva esta equacao quadratica em u.
u = 2mv±[4m2v2+4T (M+m)]1/2
2(M+m)
⇒ u = [ TM+m ]
1/2 + mvM+m
(20.15)
f) Quando m = 0, temos naturalmente u = c. Quando m 6= 0 e v = 0, teremos
entao u = c/n. Ve-se assim que c =√
T/M e n =√
M+mM . Mostre assim que se
obtem a formula de Fizeau para a velocidade da luz num meio em movimento:
u =cn+ v(
1− 1n2
). (20.16)

436 20 Teoria da Relatividade Restrita
20.1.5 Postulados da Teoria da Relatividade Especial (ou Restrita)
A experiencia de Michelson-Morley deu um resultado nulo na tentativa de determinacaoda velocidade da Terra atraves do eter - o meio transmissor das ondas electro-magneticas.
O resultado da experiencia de Michelson-Morley significa que dois observadores,A e B, em movimento relativo um ao outro com velocidade v, ambos vem uma ondaesferica provinda dos seus respectivos pontos de observacao.
Mas este resultado da observacao encontra-se em contradicao com as transformacoesde Galileu:
x′ = x− vty′ = yz′ = zt ′ = t
(20.17)
Ora vejamos. No sistema Oxyz, onde se encontra o observador A e valida a ex-pressao
x2 + y2 + z2 = c2t2, (20.18)
como equacao da superfıcie de onda decorrido o intervalo de tempo t, enquanto quea equacao da mesma superfıcie de onda no referencial O’x’y’z’ deveria ser dada,aplicando as transformacoes de Galileu, pela expressao:
(x′+ vt)2 + y′2 + z′2 = c2t2. (20.19)
Porem, o resultado da experiencia de Michelson-Morley exige que se tenha igual-mente uma esfera com centro em O’, ou seja, que se tenha
x′2 + y′2 + z′2 = c2t ′2. (20.20)
A experiencia de Michelson-Morley obriga a descrever o movimento no referencialO’x’y’z’ atribuindo um tempo local t ′, que se relaciona com o tempo t atraves dumarelacao de transformacao ainda por definir.
Einstein resolveu, de certa forma, este problema enunciando dois postulados queconstituem o cerne do celeberrimo artigo publicado em 1905 e intitulado “On theelectrodynamic of moving bodies” 4:
1. Postulado 1: As leis da fısica tem a mesma forma (sao invariantes) em todos osreferenciais de inercia;
2. Postulado 2: A rapidez da luz no vacuo e a mesma em qualquer referencial deinercia, e igual a c = 1√
εoµo= 3×108 m/s.
A expressao matematica do princıpio da relatividade encontra-se materializadanas Transformacoes de Lorentz (TL).
4 1905 e considerado o “anno mirabilis” de Einstein, e da fısica, tendo Einstein publicado 5notaveis artigos, cada um por si merecendo o premio Nobel...

20.1 Teoria da Relatividade Restrita 437
20.1.6 Relatividade e medidas; ponto de vista operacional
A questao de capital importancia da existencia (ou nao) do eter continua a suscitarmuio debate, diga-se em abono da verdade. E se nos e permitido dizer, continuaainda sem uma respota definitiva, satisfatoria.
Como reconheceu Einstein, nao existe nada na Teoria da Relatividade Especialque seja incompatıvel com o eter, muito embora Einstein defenda a inutilidade dasua existencia.
Tal nao significa que o eter (ou o espaco absoluto) nao exista. O movimento rela-tivo ao eter podera estar escondido por que a velocidade com que o eter transmite asondas e praticamente igual, ou mesmo igual, a velocidade que aparece nas formulasrelativısticas.
Existindo o eter ou nao, no ponto de vista de Einstein, o seu conceito e inutil. Aessenia da relatividade reside no caracter universal de evento e no caracter subordi-nado de espaco, tempo e materia.
A aplicacao da algebra simples das transforcoes de Lorentz requer uma definicaoprevia de alguns conceitos elementares, em acordo com o ponto de vista operacionalde Einstein.
• Evento: qualquer fenomeno que acontece e definido por meio de 4 coordenadas;
Os referenciais sao referidos na seguinte forma:
• S: (x,y,z, t).• S′: (x′,y′,z′, t ′)
COORDENADAS ESPACIAIS:
• Sistema de coordenadas preenchido com um sistema denso de reguas, orientadasao longo de cada um dos eixos; as reguas fornecem a localizacao precisa de cadaevento.
COORDENADAS TEMPORAIS:
• Cada ponto na interseccao de cada regua contem um relogio;• Os relogios sao colocados no seu lugar e simultaneamente sincronizados no in-
stante inicial t = 0 por meio de sinais luminosos (propagando-se a velocidade daluz).
• Todos os relogios sao perfeitamente iguais e trabalham ao mesmo ritmo.
Quando um evento ocorre, as coordenadas do evento no espaco-tempo ficam de-terminadas fazendo a medida das distancias com o auxılio das “reguas” e do relogiomais pertos do evento (Fig. 20.9).
Para dois eventos, a diferenca temporal e calculada como sendo a diferenca reg-istada pelos relogios mais proximos do evento; a separacao espacial e obtida a partirdas diferencas das coordenadas registadas pelas reguas proximas de cada evento.

438 20 Teoria da Relatividade Restrita
Fig. 20.9 ...
20.1.7 A transformacao de Lorentz
O postulado da invariancia da velocidade da luz em todos os referenciais de inerciatorna necessario substituir as transformacoes de Galileu pelas transformacoes deLorentz.
Estas consistem num conjunto de equacoes que relacionam (x,y,z, t) em S com(x′,y′,z′, t ′) em S′ movendo-se com velocidade v relativamente a S.
Requer-se, em particular, que se verifiquem os seguintes contrangimentos:
• a transformacao deve ser linear. Um unico evento em S deve ser transformadonum unico evento em S′;
• Quando v c, a transformacao deve tender para a transformacao de Galileu;• A rapidez da luz deve ser c em qualquer referencial de inercia.
Na verdade, as transformacoes de Lorentz (TL) verificam todos esses requerimen-tos. Por hipotese, admite-se que para x = x′ = 0 tem-se tambem t = t ′ = 0. Para doisobservadores em S e S′, as TL exprimem-se assim:
x′ = γ(x− vt)y′ = yz′ = z
t ′ = γ(t− vxc2 )
(20.21)
ondeγ =
1√1−β 2
(20.22)
sendoβ ≡ v
c. (20.23)
Nestas expressoes v conta-se como positivo se O′ desloca-se no sentido positivo, econta-se como negativo no caso contrario.
Na Fig. 20.10 mostra-se a variacao muito rapida de γ quando o racio v/c→ 1.
Fig. 20.10 Grafico de γ versus v/c.
Por simetria, temosx = γ(x′+ vt ′)
y = y′
z = z′
t = γ(t ′+ vx′c2 )
(20.24)

20.1 Teoria da Relatividade Restrita 439
Na verdade, estas equacoes foram propostas ad-hoc por Lorentz de modo a “ex-plicar” o resultado nulo da experiencia de Michelson-Morley.
20.1.8 Invariantes de espaco-tempo
Considere o evento E:
• (x, t) em S;• (x′, t ′) em S′.
Temosx′ = γ(x− vt)t ′ = γ(t− vx
c2 )(20.25)
Podemos verificar o seguinte:
(ct ′)2− (x′)2 = γ2[(ct− vxc2 )
2− (x− vt)2]
= γ2[(c2− v2)t2− (1− v2
c2 x2)]
= (ct)2− (x)2 = s2(20.26)
A quantidade s2 chama-se de it invariante.Exemplo 3: Um comboio de comprimento 1 km (medido por um observador-
passageiro) desloca-se com a velocidade de 200 km/h. Dois claroes atingem simul-taneamente as duas extremidades do comboio no ponto de vista de um observador nosolo. Qual sera o intervalo de tempo entre os dois claroes, medidos pelo observador-passageiro?
Temos(200km/h)(
1h3600s
) = 5.6×10−2km/s. (20.27)
Defenimos os eventos A e B pelos instantes em que os claroes atingem o comboio.Para o observador O no solo, verificam-se as seguintes medidas:
tB− tA =(t ′B−t ′A)+
vc2 (x
′B−x′A)√
1− vc2
0 =(t ′B−t ′A)+
5.6×10−2
c2 (103m)√1− v
c2
⇒ t ′B− t ′A =−4.02×10−3s
(20.28)
O sinal negativo indica que o evento A precede o evento B.

440 20 Teoria da Relatividade Restrita
20.1.9 O conceito de simultaneidade
Dois eventos aparecem como simultaneos a um observador se ele os observar nomesmo instante de tempo.
Suponhamos que dois eventos A e B sao simultaneos para um observador O′,de modo que t ′A = t ′B. De acordo com as transformacoes de Lorentz a diferenca detempo para o observador O sera
tB− tA =vc2 (x′B− x′A)√
1− v2
c2
(20.29)
Se os dois eventos se produzem no mesmo lugar, x′A = x′B, e eles serao simultaneosigualmente para O; de outro modo, se x′a 6= x′B, os dois eventos A e B nao seraosimultaneos para o observador O.
20.1.10 Medidas relativistas de comprimentos
Se um objecto esta em repouso em relacao a um observador, o seu comprimentoavalia-se medindo a diferenca entre as coordenadas espaciais das suas extremidades.O comprimento determinado e chamado comprimento proprio do objecto consider-ado.
Se o objecto encontra-se em movimento, o procedimento de medida e mais com-plexo na medida em que as extremidades do objecto devem ser medidas no mesmoinstante.
Consideremos entao uma regua orientada na direccao x− x′, e no repouso relati-vamente a O′. Queremos estabelecer uma relacao entre as medidas efectuadas pelosobservadores O e O′ quando O′ se desloca com velocidade v na direccao x− x′.Sejam A e B as duas extremidades da regua. De acordo com as transformacoes deLorentz, tem-se
x′b− x′A =(xB− xA)+ v(tB− tA)√
1− v2
c2
(20.30)
A diferenca x′B − x′A = Lo e o comprimento proprio da regua medido por O′. SexB e xA forem medidos no mesmo instante, tB = tA, a diferenca xB− xA = L sera ocomprimento da regua medido por O:
L = Lo
√1− v2
c2 . (20.31)
Atendendo a que√
1− v2
c2 < 1, tem-se L < Lo, o comprimento da regua em movi-mento sera menor, a regua estara contraıda, um resultado que se designa porcontraccao de Lorentz-Fitzgerald.

20.1 Teoria da Relatividade Restrita 441
Exemplo 4: Qual deve ser a velocidade atingida por um foguetao para que o seucomprimento represente 99% do seu comprimento proprio?
LLo
= 0.99 =
√1− v2
c2 ⇒ v = 0.141c. (20.32)
20.1.11 Dilatacao do tempo
Vamos agora investigar o efeito do movimento no tempo. Coloquemos um relogioem repouso no referencial em movimento (x′,y′) e consideremos dois eventos A e Bocorrendo em momentos distintos t ′A e t ′B no mesmo ponto x′0:
A : x′0 t ′AB : x′0 t ′B
(20.33)
O intervalo de tempo lido τ = t ′B− t ′A entre os dois eventos A e B no referencial emrepouso e o que se chama interval de tempo proprio. Queremos agora encontrar ointervalo de tempo lido no referencial do laboratorio usando t = γ(t ′+ x′v/c2):
tA = γ(t ′A +vx′0c2 )
tB = γ(t ′B +vx′0c2 )
(20.34)
O tempo que decorre entre os dois eventos e T = tB− tA:
T = γ(t ′B− t ′A)T = γτ
T = τ√1−v2/c2
.(20.35)
O intervalo de tempo lido no referencial do laboratorio e maior do que o que e lidono referencial proprio; este efeito chama-se dilatacao do tempo.
Exemplo 5: O decaimento do mesao. O tempo de vida medio do mesao µ eτ = 2× 10−6 s. O decaimento radioactivo tem como resultado o surgimento denovas partıculas:
µ±→ e±+ν +ν ,
o muao positivo (negativo) decai num positrao (electrao) e em dois neutrinos.Os muoes sao formados em abundancia a alta altitude quando raios cosmicos
constituıdos por protoes altamente energeticos entram na alta atmosfera. O tempode vida medio dos muoes lido no seu referencial proprio (onde estao em repouso)nao lhes permitiria alcancar a superfıcie terrestre de modo a serem detectados 5.
Sabe-se que se num instante t = 0 ha N(0) muoes, num instante posterior t deveraexistir nessa amostra N(t):
5 Parando-os por meio de absorsores densos e em seguida detectando o seu decaimento.

442 20 Teoria da Relatividade Restrita
N(t) = N(0)exp(− t
τ
)(20.36)
a) Os muoes percorrem a distancia d = 6000 m a (aproximadamente) a veloci-dade da luz, 0.998c, sendo c a velocidade da luz no vacuo. Nao considerando ofenomeno relativista, qual a distancia media percorrida pelo muao antes de se desin-tegrar?
d = vτ = 0.998×3×108×2×10−6 = 599m. (20.37)
b) Considerando a dilatacao do tempo, qual a distancia percorrida, medida porum observador terrestre?
τ′ = γτ =
τ√1− v2/c2
=2×10−6
1− (0.998)2 = 31.6×10−6s. (20.38)
c) Qual e a distancia percorrida?
d = vτ′ = (0.998×3×108)(31.6×10−6) = 9470m. (20.39)
Para um observador na Terra, a probabilidade de detectar um mesao µ e relativa-mente elevada. Esta e uma demostracao classica da dilatacao do tempo.

20.1 Teoria da Relatividade Restrita 443
“O homem vulgar, por mais dura que lhe seja a vida, tem ao menos a felicidade de a naopensar. Viver a vida decorrentemente, exteriormente, como um gato ou um cao - assimfazem os homens gerais, e assim se deve viver a vida para que possa contar a satisfacao dogato e do cao. Pensar e destruir. O proprio processo do pensamento o indica para o mesmopensamento, porque pensar e decompor. Se os homens soubessem meditar no misterio davida, se soubessem sentir as mil complexidades que espiam a alma em cada pormenor daaccao, nao agiriam nunca, nao viveriam ate. Matar-se-iam assustados, como os que sesuicidam para nao ser guilhotinados no dia seguinte.”
- Fernando Pessoa, in “O Livro do Desassossego”
20.1.12 Exercıcios
Exemplo 1: Um observador O regista a ocorrencia de dois eventos cujas distanciasespaciais e temporais sao respectivamente 3.6×108 m e t = 2 s. qual e o intervalode tempo proprio entre esses dois eventos?
Existe um observador O′ em movimento relativamente a O para o qual esses doiseventos se produzem no mesmo ponto do espaco. O intervalo de tempo proprio e ointervalo de tempo medido por esse observador. Sejam A e B esses dois eventos. Deacordo com as transformacoes de Lorentz, tem-se:
x′B− x′A = (xB−xA)−v(tB−tA)√1−v2/c2
0 = 3.6×108m−v(2s)√1−v2/c2
∴ v = 1.8×108m/s = 0.6c.
(20.40)
O intervalo de tempo proprio e dado pela equacao:
t ′B− t ′A =(tB−tA)− v
c2 (xB−xA)√1−v2/c2
=2s− 0.6×3.6×108m/s
3×108m/s√1−(0.6)2
= 1.6s(20.41)
20.1.13 Transformacao relativista das velocidades
Einstein considerou que se as transformacoes de Lorentz fossem verdadeiras, amecanica de Newton nao seria universal e deveria ser modificada. Para construiressa nova mecanica era necessario encontrar uma nova transformacoes das veloci-dades. Usando a Transformacao de Lorentz podemos obter a velocidade u′ no ref-erencial S′ admitindo que cada um dos observadores mede a velocidade de umapartıcula unica, O le as componentes da velocidade (ux,uy,uz) enquanto que O′ leas componentes (u′x,u
′y,u′z). O observador em O′ desloca-se ao longo do eixo x− x′
comum, com uma velocidade v em relacao a O.

444 20 Teoria da Relatividade Restrita
dx′ = dx−vdt√1−v2/c2
dt ′ =dt− v
c2 dx√1−v2/c2
u′x =dx′dt ′ =
dx−vdtdt− v
c2 dx =dxdt −v
1− vc2
dxdt
∴ u′x =ux−v
1− vc2 ux
(20.42)
As outras componentes podem ser obtidas de forma semelhante:
u′y =uy√
1−v2/c2
1− vc2 ux
u′y =uz√
1−v2/c2
1− vc2 ux
(20.43)
Exemplo 2: Dois foguetoes A e B deslocam-se um em direccao do outro com asvelocidades 0.8c e 0.6c um relacao a Terra. Qual e, para B a velocidade de A?
Sejam u′x =−0.6c a velocidade de B (em direccao para a esquerda) e ux = 0.8c avelocidade de A (em direccao da direita), ambas representando respectivamente asleituras dos observadores O′ e O do planeta Terra. v passa a ser a velocidade de Bem relacao a A Tem-se
u′x =ux−v
1− vc2 ux
−0.6c = 0.8c−v1− v
c2 0.8c
∴ v = 0.946c
(20.44)
sendo v = 0.946c a velocidade de B em relacao a A.
20.1.14 Momento linear relativista
Ao tentar manter a validade da lei da conservacao do momento linear para todos osobservadores, Einstein concluiu que a massa de um objecto deve ser uma funcao davelocidade u:
m =m0√
1− v2/c2, (20.45)
onde m0 e a massa em repouso, isto e, a massa do objecto medido quando este estaem repouso relativamente ao observador. O momento linear e dado por:
−→p =m0−→u√
1−u2/c2= m−→u . (20.46)
Resulta daqui que a expressao da segunda lei de Newton na Relatividade Especial e
−→F =
d−→pdt
=ddt
[m0−→u√
1−u2/c2
]=
ddt(m−→u ). (20.47)

20.1 Teoria da Relatividade Restrita 445
20.1.15 E=mc2
Na Mecanica Relativista, assim como na Mecanica Classica, a energia cinetica K deum corpo em movimento e igual ao trabalho realizado por uma forca externa:
K =∫ u
u=0(−→F ·d−→r ). (20.48)
Para simplificar suponhamos que o movimento e numa dimensao:
K =∫ u
0 Fdx =∫ u
0ddt (mu)dx =
∫ u0 d(mu) dx
dtK =
∫ u0 (mdu+udm)u =
∫ u0 (mudu+u2dm)
(20.49)
A expressao da variacao da massa com a velocidade e
m = m0√1−u2/c2
⇒ m2c2−m2u2 = m20c2
(20.50)
Derivemos ambos os membros da Eq. 20.63:
2mc2dm−m22udu−u22mdm = 0mudu+u2dm = c2dm
(20.51)
Inserindo a Eq. 20.64 na Eq. 20.49, obtem-se
K =∫ m
m0
c2dm = c2(m−m0) (20.52)
Mas a energia cinetica representa a diferenca entre a energia total E em movimentoe a sua energia em repouso E0:
E−E0 = mc2−m0c2. (20.53)
Definindo a energia em repouso por E0 = m0c2, obtemos a famosa formula de Ein-stein.
Einstein noutro celebre trabalho mostrou que a luz e constituıda por quanta 6,cada um dos quais com o momento linear p = E/c, sendo E a energia de cada umdos quantum. O argumento que se segue e semelhante ao do canhao sobre um vagao,tal como o mostra a Fig. 20.11.
Fig. 20.11 (a) - Caixa de massa 2M e comprimento L e fotao; (b) - caixa de Einstein.
Considere a caixa da Fig. 20.11 emitindo um quantum de luz do extremo A com amassa M para o extremo B de massa M, onde e absorvido. A caixa tem a massa 2M
6 No plural quanta, no singular quantum.

446 20 Teoria da Relatividade Restrita
e comprimento total L. A energia do quantum de luz e p = E/c. A caixa e supostaisolada e livre da accao de forcas externas; o CM da caixa e o momento linear totalda caixa devem permanecer nulos.
Depois da emissao do quantum de luz, a caixa sofre um recuo com velocidade
p = 2MvEc = 2Mv∴ v = E
2Mc
(20.54)
O quantum de luz (ou fotao) viaja durante o intervalo de tempo ∆ t, bate no extremooposto, transmitindo-lhe o momento igual e oposto ao inicial. A distancia percorridapela caixa e
d = v∆ t =EL
2Mc2 . (20.55)
Como o centro de massa nao pode mexer-se, deve permanecer estacionario relativa-mente a um observador externo e tem que se verificar:
Xcm = m1x1+m2x2m1+m2
0 = (M−µ)(−L/2−d)+(M+µ)(L/2−d)2M
(20.56)
Ou seja
Md = µL2
(20.57)
Como d = EL/2Mc2, conclui-se que o quantum de luz comporta-se como se tivessea “massa equivalente”:
µ = Ec2
E = µc2.(20.58)
20.1.16 Relacao entre o momento linear e a energia
Sendo o momento linear conservado, e usual em fısica das partıculas, exprimir aenergia em funcao do momento linear:
m = m0√1−v2/c2
⇒ m2c4−m2v2c2 = m20c4
E = mc2
E0 = m0c2
p = mv∴ E2 = m2
0c4 +(pc)2
(K +m0c2)2 = (m0c2)2 +(pc)2
(20.59)
Em Fısica Relativista usa-se como unidade de energia o electrao-volt (eV).

20.2 O sistema de referencia preferido em Paul Dirac 447
O ELECTRAO-VOLT E A ENERGIA CINETICA ADQUIRIDA POR UM CORPO COMA CARGA DO ELECTRAO ACELERADO A UMA DIFERENCA DE POTENCIAL DE 1VOLT.
1 eV= (1.602×10−19)(1Volt) = 1.602×10−19 JExemplo 3: Calcule a energia em repouso de um electrao em electrao-volts (eV).
E0 = m0c2 = (9.109×10−31kg)(2.998×108)2 = 8.187×10−14JE0 = (8.187×10−14J)( 1eV
1.602×10−19J )(1MeV106eV ) = 0.511MeV
Exemplo 4: Calcule o momento linear de um electrao de 1 MeV.
E2 = (pc)2 +m20c4
pc =√
(1MeV +0.511MeV )2− (0.511MeV )2
p = 1.42MeV/c(20.60)
Na Fısica Relativista o momento linear exprime-se usualmente em unidades MeV/c.
20.2 O sistema de referencia preferido em Paul Dirac
Num memoravel artigo publicado na revista Nature em 1951, o premio Nobel PaulDirac discute a existencia de um referencial preferido (“prefered frame of refer-ence”), aplicando a mecanica quantica ao eter e argumentando que “with the newtheory of electrodynamics we are rather forced to have an aether”. Interessante-mente, Dirac nao ve nenhum conflito entre a Teoria da Relatividade de Einstein e ateoria do eter.
Repare que a Eq.E2 = m2
0c4 +(pc)2 (20.61)
admite uma solucao positiva e outra negativa:
E =±√(m0c2)2 +(pc)2 (20.62)
Dirac nao viu nenhuma razao para se eliminar as energias negativas da MecanicaQuantica. Um electrao de energia negativa tera tanto menos energia quanto maiorfor a sua velocidade. Dirac conjecturou entao que todos os electroes do Universotendem a cair nesses estados de energia negativa emitindo radiamento. Assim, natu-ralmente todos os estados de energia negativa estarao ocupados, com a excepcao dealguns com baixa velocidade. Estando estes estados de energia negativa quase todosocupados, sera muito pouco provavel que os electroes de energia positiva soframuma transicao que os facam passar para esses estados. Como a distribuicao doselectroes de energia negativa e uniforme, esses electroes nao podem ser observados.Porem, podem ocorrer pequenos desvios a esse estado de uniformidade, criando-selacunas, estados desocupados nesse “mar” de energia negativa. Dirac mostrou queesses buracos, essas lacunas moviam-se sob a accao de um campo electromagnetico

448 20 Teoria da Relatividade Restrita
como se fossem partıculas de carga +e. E o anti-electrao, chamado actualmente depositrao.
20.2.1 A equacao de Dirac
A Teoria da Relatividade Especial leva-nos a seguinte relacao entre massa e energia:
(Ec)2−−→p 2 = (mc)2. (20.63)
E desta expressao que se tem de partir a fim de se obter a equacao que descreve oelectrao (partıcula de spin-1/2) no ambito da Mecanica Quantica Relativista.
Havia essa necessidade, pois a Mecanica ondulatoria desenvolvida por ErwinSchrodinger nao tinha em conta o spin do electrao e a funcao de onda Ψ era umaquantidade escalar.
A fim de ter em conta do spin do electrao, Paul Dirac sugeriu a substituicao daEq. 20.63 por
(Eop
c−−→σ ·−→p )(
Eop
c+−→σ ·−→p ) = (mc)2, (20.64)
onde todas as observaveis devem passar a ser representadas por operadores quanticos:
Eop = ih ∂
∂ t = ihc ∂
∂x0−→p =−ih−→∇
(20.65)
Assim, podemos passar a escrever a Eq. 20.66 na forma de uma equacao diferencialde segunda ordem para um electrao livre, onde Ψ representa uma funcao de ondacom duas componentes:
(ih∂
∂x0+−→σ · ih
−→∇ )(ih
∂
∂x0−−→σ · ih
−→∇ )Ψ = (mc)2
Ψ (20.66)
−→σ sao as chamadas matrizes de Pauli:
σx =
[0 11 0
]σy =
[0 −ii 0
]σz =
[1 00 −1
] (20.67)
Na Mecanica Quantica representam o operador de spin para uma partıcula de spin-1/2 (por ex.: electrao, protao).

20.2 O sistema de referencia preferido em Paul Dirac 449
O objectivo e obter uma equacao diferencial de primeira ordem no tempo. Anecessidade de a equacao ter covariancia relativista sugere que a equacao de ondaque procuramos obter deva ser linear em ∂/∂ t e em
−→∇ tambem.
Define-se entao duas funcoes de onda com duas componentes:
ΦR = 1mc (ıh
∂
∂x0− ıh−−−→σ ·−→∇ )Ψ ; Ψ L =Ψ . (20.68)
O sobrescrito R e L provem do facto que quando m→ 0, Ψ R e Ψ L descrevem oestado da partıcula de spin-1/2 que pode ter polarizacao direita (spin paralelo adireccao do momento linear) e esquerda (spin anti-paralelo a direccao do momentolinear).
A equacao diferencial de segunda ordem e agora equivalente as duas equacoesde primeira ordem:
[ıh−→σ ·−→∇ − ıh ∂
∂x0]Ψ L =−mcΨ R
h−→σ ·−→∇ − ıh ∂
∂x0Ψ R =−mcΨ L
(20.69)Fazemos notar que as duas Eqs. 20.69 acoplam Ψ R e Ψ L tal como nas equacoes deMaxwell (equacoes diferenciais de primeira ordem) acoplam
−→E e−→B . As Eqs. 20.69
sao equivalentes as equacoes de Dirac. A fim de escrevermos na forma original deDirac, somamos e subtraımos as duas Eqs. 20.69, representando a soma e a diferencapor ΨA e ΨB:
Ψ =
[ΨAΨB
]=
[Ψ R +Ψ L
Ψ R−Ψ L
](20.70)
Deste modo, a Eq. 20.70 pode escrever-se na forma mais concisa:(γ ·∇+ γ4
∂
∂ (ix0)
)Ψ +
mch
Ψ = 0, (20.71)
ou ainda (γµ
∂
∂xµ
+mch
)Ψ = 0, (20.72)
onde se usa a convencao de Einstein na soma dos ındices, e γµ com µ = 1,2,3,4sao matrizes 4×4 dadas por
γk =
[0 −iσk
iσk 0
];γ4 =
[I 00 −I
](20.73)
O sımbolo I denota a matriz identidade 2×2:
I =[
1 00 1
](20.74)
e, por exemplo

450 20 Teoria da Relatividade Restrita
γ3 =
0 0 −i 00 0 0 ii 0 0 00 −i 0 0
γ4 =
1 0 0 00 1 0 00 0 −1 00 0 0 −1
(20.75)
As matrizes 4× 4 γµ sao chamadas matrizes gama ou matrizes de Dirac. AsEqs. 20.72 sao na verdade 4 equacoes que acoplam as 4 componentes da funcaode onda Ψ :
Ψ =
Ψ1Ψ2Ψ3Ψ4
(20.76)
que se chama um bispinor ou um spinor de Dirac.
20.2.2 A bomba atomica
A descoberta da energia de repouso por Einstein em 1905 fizera sem duvida grandefuror. Essa teoria afirmava a existencia de uma nova fonte de energia, afirmandopor exemplo que a aniquilacao de 1 grama de materia equivaleria a a combustao de3000 toneladas de carvao. A sua confirmacao veio depois da descoberta do neutrao.Um nucleo fica inteiramente definido pelo seu numero de protoes, Z, e de neutroes,N. O seu numero de massa e entao A = Z +N. A notacao usada na representacao 7
de um nucleo X com numero de massa A, numero atomico Z e numero de neutroesN = A−Z e A
ZXN (por exemplo, 3517Cl18).
Ao medir-se com precisao a massa AZM do nucleo atomico pelo processo que
utiliza o desvio da trajectoria de uma partıcula carregada ao passar por um campomagnetico, verificou-se que
AZM < Zmp +(A−Z)mn, (20.77)
onde mp e mn sao as massas do protao e do neutrao, respectivamente. A diferencachama-se defeito de massa.
O DEFEITO DE MASSA CORRESPONDE A ENERGIA DE LIGACAO QUE SE LIB-ERTA QUANDO OS VARIOS NUCLEOES SE LIGAM PARA FORMAR UM NUCLEO.
Em alternativa, pode-se dizer que o defeito de massa e a energia que e necessariafornecer ao nucleo para separar os nucleoes uns dos outros a distancias grandesquando comparadas com o alcance das forcas nucleares.
As pesquisas de Enrico Fermi em 1934 foram encorajadoras. Fermi sabia quequando ha excesso de neutroes no nucleo, o neutrao emite um electrao transformando-
7 Os atomos dum conjunto constituıdos por um dado nucleo chamam-se nuclidos; os nuclidos domesmo Z e com A diferente isotopos; aqueles que tem o mesmo A mas contem diferentes N e Zchamam-se isobaros.

20.2 O sistema de referencia preferido em Paul Dirac 451
o num protao, fenomeno esse conhecido por decaimento β 8. No decaimento β−, aforca de interaccao fraca converte um neutrao (n) num protao (p), emitindo tambemum electrao (e−) e um anti-neutrino (νe):
n→ p+ e−+νe. (20.78)
Fermi incidiu um feixe de neutroes sobre o uranio na expectativa que este ab-sorvesse neutroes que ficariam em excesso no nucleo, decaindo em seguida emprotoes com a emissao para fora do nucleo do electrao, e formando-se assim umnovo elemento quımico com numero atomico superior ao uranio; na realidade, umelemento novo artificial.
Em Janeiro de 1939, Hahn e Strassmann descobriram que o bombardeamento donucleo de uranio produzia o elemento Ba.
U +n→ Ba+Kr+3n (20.79)
O elemento uranio combina-se com um neutrao, partindo-se em seguida em doisnovos elementos (bario e crıpton), mais tres neutroes. Na verdade, esta e apenasuma das maneiras do nucleo de uranio se cindir.
Meitner, uma cientista judia fugida da Alemanha Nazi, interpretou correctamenteesse fenomeno como correspondendo a fissao nuclear. Estudos posteriores nos Es-tados Unidos e em Franca mostraram que eram emitidos em media 2.5 neutroes de2 MeV por cada fissao. Havia entao a possibilidade de esses neutroes provocaremmais fissoes, e por sua vez mais neutroes, isto e, uma reaccao em cadeia. Toda aatencao dos investigadores convergiu para o uranio como uma nova fonte de energia.
As pesquisas realizadas levaram os investigadores a conclusao que para se obteruma reaccao em cadeia era necessario diminuir a energia dos neutroes criados pelafissao e fazer o 235U absorver esse neutrao para subsequente fissao. Fermi sugeriu ometodo do espalhamento elastico: por colisoes elasticas sucessivas do neutrao comum elemento diminui-se a sua energia. Escolheu-se o carbono.
Posteriormente, descobriu-se o plutonio-239 como elemento fissıvel.Havia porem outro problema, que era a fuga do neutrao da amostra. Para que a
producao de neutroes fosse maior que a perda era necessario que a amostra tivesseuma certa massa de uranio, pois que nao existe um material reflector perfeito deneutroes.
Exemplo 5: Determine a dimensao crıtica da amostra de uranio-235 de modo apermitir a reaccao em cadeia.
Considere uma mostra de forma cubica de aresta de comprimento L. A producaodeve ser proporcional ao volume, G = aL3; a perda de neutroes deve ser propor-cional a superfıcie, P = bL2. O ganho em neutroes deve ser superior as perdas paraa ocorrencia da reaccao em cadeia:
8 O decaimento nuclear e um tipo de decaimento radioactivo no qual uma partıcula beta (umelectrao ou um positrao) e emitido.

452 20 Teoria da Relatividade Restrita
G = aL3
P = bL2
G > P⇒ bL2 > aL3
∴ L > ab .
(20.80)
a e b eram coeficientes a determinar pela experiencia. Conclui-se que e necesarioum pedaco de uranio com um certo valor crıtico, era necessaria uma certa massacrıtica.
Enrico Fermi e um grupo de cientistas da Universidade de Chicago estavamcertos que uma suficiente quantidade de uranio colocada em condicoes determi-nadas, resultaria numa reaccao nuclear auto-sustentada. Efectivamente, as 15:25 de2 Dezembro de 1942, num campo de handball abandonado do Stagg Field Stadiumda Universidade de Chicago, realizou-se a experiencia. Uma reaccao em cadeia quedurou 28 minutos foi iniciada, controlada e parada. O reactor consistia em pilhas deuranio separadas umas das outras por blocos de grafite para travar os neutroes e per-mitir a reaccao de fissao em cadeia. Mas efectivamente a reaccao era controlada porbarras de cadmio que absorviam os neutroes. Retirar as barras equivale a aumentara reaccao; ao reinseri-las reduzia-se a reaccao em cadeia. Na Fig. 20.12 mostra-se oreactor apelidado Chicago Pile-1. Estava iniciada a idade atomica !
Fig. 20.12 (a) - Esquema do primeiro reactor nuclear Chicago Pile-1; (b) - pintura da epocailustrando o momento em que decorre a experiencia (que decorreu sem que houvesse escudo deproteccao contra o radiamento letal que se liberta na fissao nuclear...)
Os habitantes de Chicago nao souberam que a sua vida esteve em perigo. Naverdace, a experiencia poderia ter corrido mal !
O princıpio de funcionamento de uma bomba atomica e simples. Em Los Alamosimaginaram o esquema mostrado na Fig. 20.13. Quando ocorre a explosao do deton-ador, as duas partes de uranio juntam-se, constituindo a massa crıtica necessaria paraa ocurrencia da fissao nuclear; ocorre entao uma reaccao em cadeia descontrolada,resultando numa explosao nuclear.
Fig. 20.13 (a) - Esquema da bomba atomica construıda em Los Alamos durante a WWII; (b) -Foto do “cogumelo” formado pela explosao nuclear da bomba atomica lancada sobre Hiroshima.
A idade atomica apareceu ao grande publico de forma brutal quando foi con-hecido o lancamento da bomba de uranio enriquecido sobre a cidade de Hiroshima a6 de Agosto de 1945, seguida pelo lancamento de uma segunda bomba (de plutonio)sobre a cidade de Nagasaki a 9 de Agosto de 1945. Foi nesta altura que a co-munidade cientıfica se apercebeu de forma dramatica das suas responsabilidadespolıticas...

20.3 Teoria da Relatividade Geral 453
Fig. 20.14 Extracto da carta dirigida por Einstein ao Presidente Roosevelt.
20.3 Teoria da Relatividade Geral
A ciencia e um processo de descoberta dos fenomenos naturais que se encontra per-manentemente inacabado. Aristoteles atribuıu a causa da gravidade ao movimentonatural.
Johannes Kepler (1571-1630) foi o primeiro cientista da Era Moderna queprocurou unificar as leis da Fısica, fazendo uma sıntese entre a fısica reconhecidacomo descritiva dos fenomenos terrestres e os fenomenos cosmicos recorrendo aoconceito de forca de atraccao magnetica.
Keplers goal is to unite astronomy and physics, I believe that both sciences areso closely interlinked that one cannot attain completion without the other.1 Ke-plers new natural philosophy is inspired by William Gilberts magnetical philosophy,which Kepler extends to create a theory of planetary revolutions. This attempt at uni-fication, like Gilberts attempt to unify terrestrial physics under magnetism, was notsuccessful. But his ideas formed the basic framework which enabled Isaac Newtonto successfully complete the unification under the principle of universal gravitationusing the new science of mechanics.
Galileu ao estudar o movimento circular e a trajectoria dos projecteis. Descartesexplicava a gravidade com os vortices cosmicos. Newton proos a lei F = GMm/r2
e a accao a distancia. Einstein propos que a curvatura do espaco-tempo devido apresenca da materia era a sua causa. O que nos espera no futuro?
”When forced to summarize the general theory of relativity in one sentence: Time and spaceand gravitation have no separate existence from matter. ... Physical objects are not in space,but these objects are spatially extended. In this way the concept ’empty space’ loses itsmeaning. ... The particle can only appear as a limited region in space in which the fieldstrength or the energy density are particularly high. ... The free, unhampered exchange ofideas and scientific conclusions is necessary for the sound development of science, as it isin all spheres of cultural life. ... We must not conceal from ourselves that no improvementin the present depressing situation is possible without a severe struggle; for the handful ofthose who are really determined to do something is minute in comparison with the mass ofthe lukewarm and the misguided. ... Humanity is going to need a substantially new way ofthinking if it is to survive!” (Albert Einstein)
A Teoria da Relatividade Especial nao esta preparada para acomodar o campogravıtico. Da electrodinamica das cargas em movimento chegou-se as equacoes
4φ =−ρ (a)−→F .
= d−→pdt =−q
−→∇ φ . (b)
(20.81)
A Eq. 20.81 prediz que variacoes instantaneas de carga δρ implicam variacoes in-stantaneas e simultaneas de potencial δφ . Porem, noutro referencial equivalente es-sas variacoes nao sao simultaneas 9. Torna-se necessario proceder a uma modificaca
9 Recorde a nao simultaneidade dos eventos na TREE.

454 20 Teoria da Relatividade Restrita
o da Eq. 20.81-(a), substituindo-a por
4φ − ∂ 2φ
∂ t2 =−ρ. (20.82)
Em 1911 Albert Einstein formulou uma nova teoria valida para sistemas acel-erados. Einstein apercebeu-se que a teoria da Gravitacao devia ser formulada noquadro teorico do espaco-tempo. Nas regioes sem gravitacao o espaco seria plano.Nas regioes com gravitacao ele seria curvo. Na presenca unicamente de camposgravitacionais os corpos descrevem geodesicas no espaco curvo. No espaco plano(e na ausencia de campos gravıticos) os corpos descrevem linhas rectas.
A materia curva o espaco-tempo, espaco de Riemann. T αβ e o tensor de energia-impulsao. Einstein descobriu que a equacao fundamental do campo:
Sαβ = χTαβ (20.83)
onde χ = 8πG/c4.Em 1916, Schwarzschild descobriu uma solucao uma solucao particular para esta
equacao num espaco sem materia mas com uma singularidade pontual onde e su-posta encontrar-se um corpo muito massivo M:
ds2 = (1− 2mr)−1− r2(dθ
2 + cos2θdφ
2)+ c2(1− 2mr)dt2, (20.84)
onde pusemos m = MG/c2. Convem referir que as equacoes da Relatividade Geralsao de uma extrema dificuldade, conhecendo-se a sua solucao em apenas algunscasos.
20.3.0.1 Algumas verificacoes experimentais
• Calculo do avanco do perielio de Mercurio• Desvio de um raio luminoso vindo de uma estrela pelo campo gravıtico do Sol• O eclipse de Sobral, Ceara e na ilha do Principe, em Sao Tome e Principe.
20.3.1 O Princıpio da Covariancia
O princıpio da covariancia em fısica procura eliminar aspectos subjectivos semimportancia do campo da experiencia humana. O princıpio da covariancia ou oprincıpio da invariancia de forma das leis fısicas, busca uma formulacao das leisfısicas de tal forma que observadores em diferentes posicoes e em diferentes esta-dos de movimento possam usar essas mesmas leis invariantes sem ambiguidades.

20.3 Teoria da Relatividade Geral 455
“Do not say a little in many words but a great deal in a few.”
- Pitagoras.
20.3.2 Tempo proprio
Para um observador O, quando dois eventos desenrolam-se no mesmo lugar, o in-tervalo de tempo que decorre pode ser medido por O usando o unico relogio que esuposto possuir, ∆ to = τ = tB− tA. Este intervalo de tempo medido no referencialproprio do observador O chama-se de tempo proprio.
20.3.3 Dilatacao do tempo
Consideremos agora os dois eventos A e B referidos na Sec. 20.3.2, mas agora vis-tos no referencial de inercia de um segundo observador O′, movendo-se com ve-locidade uniforme v em relacao a O. Para O′ os dois eventos ocorrem em dois lu-gares diferentes e precisara de dois relogios deferentes e sincronizados (um com ooutro) para poder determinar o intervalo de tempo t ′B−t ′A = ∆ t ′. Substraindo as duastransformacoes temporais de Lorentz:
t ′B =tB− v
c2 (xB−xA)√1− v2
c2
;
t ′A =tA− v
c2 (xB−xA)√1− v2
c2
;
∴ ∆ t ′ = ∆ t0√1− v2
c2
,
(20.85)
porque O regista os dois eventos que se produzem no mesmo lugar, xB− xA = 0.
Como√
1− v2
c2 < 1, ∆ t ′ > ∆ to, o intervalo de tempo medido por O′ e maior,dizendo-se que ocorreu uma dilatacao do tempo. O fenomeno da dilatacao dotempo, assim como o da contracao dos comprimentos sao fenomenos perfeitamentereais. Poderıamos efectuar a seguinte experiencia,
20.3.4 Os Espacos Fibrados e a Teoria Quantica
Os campos de gauge foram introduzidos em 1920 por Hermann Weyl. Em 1954 C.N. Yang e Robert Mills aplicaram o conceito de campos de gauge as forcas nucle-

456 20 Teoria da Relatividade Restrita
ares. Um estudo mais profundo destes campos permitiu que fossem reconhecidasestruturas mais abstractas chamadas espacos fibrados.

Index
eter, 5
Aceleracao, 27, 67Aceleracao instantanea, 27aceleracao media, 27acronyms, list of, xxiiiAdicao de Vectores, 40Aristoteles, 1, 3, 5Arquimedes, 1, 3August Ferdinand Mobius, 39
Barao Roland von Eotvos, 33
Carl Friedrich Gauss, 39Caspar Wessel, 39Christian Huygens, 2Cinematica a tres dimensoes, 65coordenadas cartesianas, 15corrente electrica, 5
datacao radioactiva, 17Dinamica, 3
eixos de coordenadas, 15epiciclos, 5Eratostenes, 13Escolastica medieval, 5espaco absoluto, 5estadio egıpcio, 15Estatica, 3experiencia de Michelson-Morley, 5
Filolau, 4foreword, vii
Galileu Galilei, 2grandezas derivadas, 5
grandezas fundamentais, 5
Heron de Alexandria, 2
intensidade luminosa, 5Isaac Newton, 2isocronismo do pendulo, 2
James Clerck-Maxwell, 4Jean Robert Argand, 39
Kepler, 2
Leonardo da Vinci, 2linha de universo, 20
metodo da triangulacao, 13Metodo do veio em rotacao, 25metodos electronicos, 17Mecanica, 3meia-vida, 17meridiano, 6metro, 5Movimento, 4movimento, 1movimento uniforme, 19
Numero imaginario puro, 39
osciloscopio, 17
paralaxe trigonometrica, 13Parmenides, 4Pitagoras de Samos, 4Princıpio da Alavanca, 3Princıpio fundamental da hidrostatica, 3Princıpios matematicos de filosofia natural, 2
457

458 Index
problema a dois corpos, 35
quantidade de substancia, 5quantidade fısica, 6Queda livre, 33
Rapidez, 67rapidez, 20rapidez media, 20referencial, 15
sistema de coordenadas, 15sistema de coordenadas polares, 15Sistema Internacional de Unidades, 5sistema Ptolemaico, 5Stevin, 2Stevinus de Bruges, 3symbols, list of, xxiii
tabela horaria do movimento, 19temperatura, 5Tempo de voo, 24tempos muito curtos, 17tempos muito longos, 17teodolito, 13
unidade, 6
Varigon, 2vector deslocamento, 65Vectores, 39velocidade da luz no vacuo, 1, 6Velocidade media, 19, 65velocidade media, 20, 66
Zenao de Eleia, 4












![arXiv:physics/0110041v1 [physics.pop-ph] 14 Oct 2001 · que exploram os paralelos entre evoluc¸˜ao cultural e evoluc¸˜ao biol´ogica, ´e a de que conceitos ou id´eias nunca](https://img.pdfslide.us/doc/110x75/5faa63dc8f60ad743e6f2737/arxivphysics0110041v1-14-oct-2001-que-exploram-os-paralelos-entre-evolucoeao.jpg)