Embed Size (px)
Citation preview

Gasoline-engine management
Technical Instruction
ME-Motronicengine managementEdition 1999

Published by:© Robert Bosch GmbH, 1999Postfach 30 0220D-70442 StuttgartAutomotive Equipment Business Sector.Product-Marketing software products (KH/PDI2).
Editor-in-Chief:Dipl.-Ing. (FH) Horst Bauer,
Editors:Dipl.-Ing. Karl-Heinz Dietsche,Dipl.-Ing. (BA) Jürgen Crepin,Dipl.-Holzw. Folkhart Dinkler.
Authors:Dipl.-Ing. Jürgen Gerhardt,Dipl.-Ing. Walter Gollin.
Layout:Berthold Gauder, Leinfelden-Echterdingen.
Translation:Editor-in-Chief:Peter Girling
Technical graphics:Bauer & Partner, Stuttgart.
Unless otherwise stated, the above are all employees of Robert Bosch GmbH, Stuttgart.
All rights reserved.
Reproduction, duplication, and translation of thispublication, including excerpts therefrom, is only toensue with our previous written consent and with par-ticulars of source. Illustrations, descriptions, schema-tic diagrams and other data only serve forexplanatory purposes and for presentation of thetext. They cannot be used as the basis for design,installation, and scope of delivery. Robert BoschGmbH undertakes no liability for conformity of thecontents with national or local regulations. Wereserve the right to make changes.
Printed in Germany.Imprimé en Allemagne.
1st Edition, September 1999English translation of the German edition dated: March 1999.

Combustion in the gasoline engineThe spark-ignition engine 2
Gasoline-engine managementTechnical requirements 4Cylinder charge 5Mixture formation 7Ignition 10Inductive ignition systems 13
Gasoline-injection systemsOverview 16
ME-Motronic engine managementThe overall Motronic system 18Cylinder-charge control systems 21Fuel system 28Operating-data acquisition 34Operating-data processing 42Operating conditions 47Closed-loop idle-speed control 52Lambda closed-loop control 52Evaporative-emissionscontrol system 55Knock control 57Boost-pressure control 58Protective functions 59Improved drivability 60Cruise control 60Integrated diagnosis 62ECU 68Interfaces to other systems 70
ME-Motronicengine management
Electronic engine-management sys-tems have advanced to become decisivefactors in promoting fuel economy andenhancing the motor vehicle’s environ-mental compatibility.The engine-management system’s pri-mary assignment is to furnish the torquerequested by driver demand while at thesame time ensuring maximum fuel econ-omy and minimum emissions. The ME-Motronic engine-management systemfor the gasoline engine (also known asthe spark-ignition (SI) or Otto-cycle en-gine), unites all of the subsystems re-quired to meet this challenge: The elec-tronic throttle control (ETC, or “drive bywire”) regulates the flow of induction airto satisfy instantaneous torque demand,while the fuel-injection subsystem regu-lates fuel mass. Meanwhile, the ignitionsubsystem governs ignition timing andthe generation of spark energy.ME-Motronic’s capabilities extend evenfurther to embrace coordinated actionwith other automotive systems designedto enhance comfort, convenience andsafety for the user. An example is the wayME-Motronic adjusts torque levels to en-sure maximum traction in response todemands from the ABS and ESP sys-tems.Progress in satisfying this highly varie-gated range of engine-management functions has been marked by ever-closer coordination of the individual sub-systems. This brochure explains the design concept behind ME-Motronic engine management as well as how thesystem operates.Conventional Motronic systems are de-scribed in a publication from this seriesentitled “M-Motronic engine manage-ment”.

The spark-ignition or Otto-cycle engine
Operating conceptThe spark-ignition or Otto-cycle1)powerplant is an internal-combustion (IC)engine that relies on an externally-generated ignition spark to transform thechemical energy contained in fuel intokinetic energy. Today’s standard spark-ignition enginesemploy manifold injection for mixtureformation outside the combustionchamber. The mixture formation systemproduces an air/fuel mixture (based ongasoline or a gaseous fuel), which is then drawn into the engine by the suctiongenerated as the pistons descend. Thefuture will see increasing application ofsystems that inject the fuel directly into thecombustion chamber as an alternateconcept. As the piston rises, it compressesthe mixture in preparation for the timedignition process, in which externally-generated energy initiates combustion viathe spark plug. The heat released in the
combustion process pressurizes thecylinder, propelling the piston back down,exerting force against the crankshaft andperforming work. After each combustionstroke the spent gases are expelled fromthe cylinder in preparation for ingestion ofa fresh charge of air/fuel mixture. Theprimary design concept used to governthis gas transfer in powerplants forautomotive applications is the four-strokeprinciple, with two crankshaft revolutionsbeing required for each complete cycle.
The four-stroke principleThe four-stroke engine employs flow-control valves to govern gas transfer(charge control). These valves open andclose the intake and exhaust tractsleading to and from the cylinder:
1st stroke: Induction,2nd stroke: Compression and ignition,3rd stroke: Combustion and work,4th stroke: Exhaust.
Induction strokeIntake valve: open,Exhaust valve: closed,Piston travel: downward,Combustion: none.
The piston’s downward motion increasesthe cylinder’s effective volume to drawfresh air/fuel mixture through the passageexposed by the open intake valve.
Compression strokeIntake valve: closed,Exhaust valve: closed,Piston travel: upward,Combustion: initial ignition phase.
Combustion in the gasoline
engine
2
Combustion in the gasoline engine
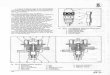
Reciprocating piston-engine design concept
OT = TDC (Top Dead Center); UT = BDC (BottomDead Center), Vh Swept volume, VC Compressedvolume, s Piston stroke.
Fig. 1
UM
M00
01E
OT
UT
OT
UT
Vh
s
VC
1) After Nikolaus Augst Otto (1832–1891), whounveiled the first four-stroke gas-compression engineat the Paris World Exhibition in 1876.

As the piston travels upward it reducesthe cylinder’s effective volume tocompress the air/fuel mixture. Just beforethe piston reaches top dead center (TDC)the spark plug ignites the concentratedair/fuel mixture to initiate combustion.Stroke volume Vh
and compression volume VC
provide the basis for calculating thecompression ratioε = (Vh+VC)/VC.Compression ratios ε range from 7...13,depending upon specific engine design.Raising an IC engine’s compression ratioincreases its thermal efficiency, allowingmore efficient use of the fuel. As anexample, increasing the compression ratiofrom 6:1 to 8:1 enhances thermalefficiency by a factor of 12%. The latitudefor increasing compression ratio isrestricted by knock. This term refers touncontrolled mixture inflammation charac-terized by radical pressure peaks.Combustion knock leads to enginedamage. Suitable fuels and favorablecombustion-chamber configurations canbe applied to shift the knock threshold intohigher compression ranges.
Power strokeIntake valve: closed,Exhaust valve: closed,Piston travel: upward,Combustion: combustion/post-combus-tion phase.
The ignition spark at the spark plugignites the compressed air/fuel mixture,thus initiating combustion and theattendant temperature rise.This raises pressure levels within thecylinder to propel the piston downward.The piston, in turn, exerts force againstthe crankshaft to perform work; thisprocess is the source of the engine’spower.Power rises as a function of engine speedand torque (P = M⋅ω).A transmission incorporating variousconversion ratios is required to adapt thecombustion engine’s power and torquecurves to the demands of automotiveoperation under real-world conditions.
Exhaust strokeIntake valve: closed,Exhaust valve: open,Piston travel: upward,Combustion: none.
As the piston travels upward it forces thespent gases (exhaust) out through thepassage exposed by the open exhaustvalve. The entire cycle then recommenceswith a new intake stroke. The intake andexhaust valves are open simultaneouslyduring part of the cycle. This overlapexploits gas-flow and resonance patternsto promote cylinder charging andscavenging.
Otto cycle
3
Operating cycle of the 4-stroke spark-ignition engine
Fig. 2
UM
M00
11E
Stroke 1: Induction Stroke 2: Compression Stroke 3: Combustion Stroke 4: Exhaust

Technical requirements
Spark-ignition (SI)engine torque
The power P furnished by the spark-ignition engine is determined by theavailable net flywheel torque and theengine speed.The net flywheel torque consists of theforce generated in the combustionprocess minus frictional losses (internalfriction within the engine), the gas-exchange losses and the torque requiredto drive the engine ancillaries (Figure 1). The combustion force is generatedduring the power stroke and is defined bythe following factors:– The mass of the air available for
combustion once the intake valveshave closed,
– The mass of the simultaneouslyavailable fuel, and
– The point at which the ignition sparkinitiates combustion of the air/fuelmixture.
Primary engine-management functions
The engine-management system’s firstand foremost task is to regulate theengine’s torque generation by controllingall of those functions and factors in thevarious engine-management subsystemsthat determine how much torque isgenerated.
Cylinder-charge controlIn Bosch engine-management systemsfeaturing electronic throttle control (ETC),the “cylinder-charge control” subsystemdetermines the required induction-airmass and adjusts the throttle-valveopening accordingly. The driver exercisesdirect control over throttle-valve openingon conventional injection systems via thephysical link with the accelerator pedal.
Mixture formationThe “mixture formation” subsystem cal-culates the instantaneous mass fuelrequirement as the basis for determiningthe correct injection duration and optimalinjection timing.
Gasoline-engine
management
4
Gasoline-engine management
Driveline torque factors
1 Ancillary equipment(alternator,a/c compressor, etc.),
2 Engine,3 Clutch,4 Transmission.
UM
M05
45-1
E
Fig. 1
Air mass (fresh induction charge)
Fuel mass
Ignition angle (firing point)Engine
Gas-transfer and frictionAncillaries
Clutch/converter losses and conversion ratiosTransmission losses and conversion ratios
Combustion output torque
Engineoutput torque
Flywheel torque
Drive force
– –– –– –Clutch Trans-
mission
1 1 2 3 4

Cylindercharge
5
IgnitionFinally, the “ignition” subsystem de-termines the crankshaft angle thatcorresponds to precisely the ideal instantfor the spark to ignite the mixture.
The purpose of this closed-loop controlsystem is to provide the torquedemanded by the driver while at thesame time satisfying strict criteria in theareas of– Exhaust emissions,– Fuel consumption,– Power,– Comfort and convenience, and– Safety.
Cylinder chargeElementsThe gas mixture found in the cylinderonce the intake valve closes is referred toas the cylinder charge, and consists ofthe inducted fresh air-fuel mixture alongwith residual gases.
Fresh gasThe fresh mixture drawn into the cylinderis a combination of fresh air and the fuelentrained with it. While most of the freshair enters through the throttle valve,supplementary fresh gas can also bedrawn in through the evaporative-
emissions control system (Figure 2). Theair entering through the throttle-valve andremaining in the cylinder after intake-valve closure is the decisive factordefining the amount of work transferredthrough the piston during combustion,and thus the prime determinant for theamount of torque generated by theengine. In consequence, modifications toenhance maximum engine power andtorque almost always entail increasingthe maximum possible cylinder charge.The theoretical maximum charge isdefined by the volumetric capacity.
Residual gasesThe portion of the charge consisting ofresidual gases is composed of– The exhaust-gas mass that is not
discharged while the exhaust valve isopen and thus remains in the cylinder,and
– The mass of recirculated exhaust gas(on systems with exhaust-gas recircu-lation, Figure 2).
The proportion of residual gas is de-termined by the gas-exchange process.Although the residual gas does notparticipate directly in combustion, it doesinfluence ignition patterns and the actualcombustion sequence. The effects of thisresidual-gas component may be thoroughlydesirable under part-throttle operation.Larger throttle-valve openings to com-pensate for reductions in fresh-gas filling
Cylinder charge in the spark-ignition engine
1 Air and fuel vapor,2 Purge valve
with variable aperture,3 Link to evaporative-emissions
control system,4 Exhaust gas,5 EGR valve with
variable aperture,6 Mass airflow (barometric pressure pU),7 Mass airflow
(intake-manifold pressure ps),8 Fresh air charge
(combustion-chamber pressure pB),9 Residual gas charge
(combustion-chamber pressure pB),10 Exhaust gas (back-pressure pA),11 Intake valve,12 Exhaust valve,α Throttle-valve angle.
UM
M05
44-1
Y
Fig. 2
1
6 7 108
2 3
54
11 12
9
α

are needed to meet higher torquedemand. These higher angles reduce theengine’s pumping losses, leading tolower fuel consumption. Precisely reg-ulated injection of residual gases canalso modify the combustion process toreduce emissions of nitrous oxides (NOx)and unburned hydrocarbons (HC).
Control elements
Throttle valveThe power produced by the spark-ignition engine is directly proportional tothe mass airflow entering it. Control ofengine output and the correspondingtorque at each engine speed is regulatedby governing the amount of air beinginducted via the throttle valve. Leavingthe throttle valve partially closed restrictsthe amount of air being drawn into theengine and reduces torque generation.The extent of this throttling effectdepends on the throttle valve’s positionand the size of the resulting aperture.The engine produces maximum powerwhen the throttle valve is fully open(WOT, or wide open throttle).Figure 3 illustrates the conceptualcorrelation between fresh-air chargedensity and engine speed as a functionof throttle-valve aperture.
Gas exchangeThe intake and exhaust valves open andclose at specific points to control thetransfer of fresh and residual gases. Theramps on the camshaft lobes determineboth the points and the rates at which thevalves open and close (valve timing) todefine the gas-exchange process, andwith it the amount of fresh gas availablefor combustion.Valve overlap defines the phase in whichthe intake and exhaust valves are opensimultaneously, and is the prime factor indetermining the amount of residual gasremaining in the cylinder. This process isknown as "internal" exhaust-gasrecirculation. The mass of residual gascan also be increased using "external"exhaust-gas recirculation, which relies
on a supplementary EGR valve linkingthe intake and exhaust manifolds. Theengine ingests a mixture of fresh air andexhaust gas when this valve is open.
Pressure chargingBecause maximum possible torque isproportional to fresh-air charge density, itis possible to raise power output bycompressing the air before it enters thecylinder.
Dynamic pressure chargingA supercharging (or boost) effect can beobtained by exploiting dynamics withinthe intake manifold. The actual degree ofboost will depend upon the manifold’sconfiguration as well as the engine’sinstantaneous operating point(essentially a function of the engine’sspeed, but also affected by load factor).The option of varying intake-manifoldgeometry while the vehicle is actuallybeing driven, makes it possible to employdynamic precharging to increase themaximum available charge mass througha wide operational range.
Mechanical superchargingFurther increases in air mass areavailable through the agency of
Gasoline-engine
management
6
Throttle-valve map for spark-ignition engine
Throttle valve at intermediate apertureU
MM
0543
-1E
Fig. 3
Fres
h ga
s ch
arge
RPMmin. max.
Throttle valve completely open
Throttle valve completely closed
Idle

Mixtureformation
7
mechanically driven compressors pow-ered by the engine’s crankshaft, with thetwo elements usually rotating at an in-variable relative ratio. Clutches are oftenused to control compressor activation.
Exhaust-gas turbochargersHere the energy employed to power thecompressor is extracted from the exhaustgas. This process uses the energy thatnaturally-aspirated engines cannotexploit directly owing to the inherentrestrictions imposed by the gas ex-pansion characteristics resulting from thecrankshaft concept. One disadvantage isthe higher back-pressure in the exhaustgas exiting the engine. This back-pressure stems from the force needed tomaintain compressor output.The exhaust turbine converts theexhaust-gas energy into mechanicalenergy, making it possible to employ animpeller to precompress the incomingfresh air. The turbocharger is thus acombination of the turbine in the exhaust-fas flow and the impeller that compressesthe intake air. Figure 4 illustrates the differences in thetorque curves of a naturally-aspiratedengine and a turbocharged engine.
Mixture formation
ParametersAir-fuel mixtureOperation of the spark-ignition engine iscontingent upon availability of a mixturewith a specific air/fuel (A/F) ratio. Thetheoretical ideal for complete combustionis a mass ratio of 14.7:1, referred to asthe stoichiometric ratio. In concrete termsthis translates into a mass relationship of14.7 kg of air to burn 1 kg of fuel, whilethe corresponding volumetric ratio isroughly 9,500 litres of air for completecombustion of 1 litre of fuel.
The air-fuel mixture is a major factor indetermining the spark-ignition engine’srate of specific fuel consumption.Genuine complete combustion andabsolutely minimal fuel consumptionwould be possible only with excess air,but here limits are imposed by suchconsiderations as mixture flammabilityand the time available for combustion.
The air-fuel mixture is also vital indetermining the efficiency of exhaust-gastreatment system. The current state-of-the-art features a 3-way catalyticconverter, a device which relies on astoichiometric A/F ratio to operate atmaximum efficiency and reduce un-desirable exhaust-gas components bymore than 98 %.
Current engines therefore operate with astoichiometric A/F ratio as soon as theengine’s operating status permits
Certain engine operating conditionsmake mixture adjustments to non-stoichiometric ratios essential. With acold engine for instance, where specificadjustments to the A/F ratio are required.As this implies, the mixture-formationsystem must be capable of responding toa range of variable requirements.
Torque curves for turbocharged and atmospheric-induction engines with equal power outputs
1 Engine with turbocharger,2 Atmospheric-induction engine.
UM
M04
59-1
E
Fig. 4
1
2
14
12
34
11
Eng
ine
torq
ue M
d
Engine rpm nn

Excess-air factorThe designation l (lambda) has beenselected to identify the excess-air factor(or air ratio) used to quantify the spreadbetween the actual current mass A/F ratioand the theoretical optimum (14.7:1):λ = Ratio of induction air mass to airrequirement for stoichiometric com-bustion.λ = 1: The inducted air mass correspondsto the theoretical requirement.λ < 1: Indicates an air deficiency,producing a corresponding rich mixture.Maximum power is derived from λ =0.85...0.95.λ > 1: This range is characterized byexcess air and lean mixture, leading tolower fuel consumption and reducedpower. The potential maximum value for λ– called the “lean-burn limit (LML)” – isessentially defined by the design of theengine and of its mixture for-mation/induction system. Beyond thelean-burn limit the mixture ceases to beignitable and combustion miss sets in,accompanied by substantial degener-ation of operating smoothness.In engines featuring systems to inject fueldirectly into the chamber, these operatewith substantially higher excess-airfactors (extending to λ = 4) since com-bustion proceeds according to differentlaws.Spark-ignition engines with manifoldinjection produce maximum power at air
deficiencies of 5...15% (λ = 0.95...0.85),but maximum fuel economy comes in at10...20% excess air (λ = 1.1...1.2).Figures 1 and 2 illustrate the effect of theexcess-air factor on power, specific fuelconsumption and generation of toxicemissions. As can be seen, there is nosingle excess-air factor which cansimultaneously generate the mostfavorable levels for all three factors. Airfactors of λ = 0.9...1.1 produce“conditionally optimal” fuel economy with“conditionally optimal” power generationin actual practice.Once the engine warms to its normaloperating temperature, precise andconsistent maintenance of λ = 1 is vitalfor the 3-way catalytic treatment ofexhaust gases. Satisfying this re-quirement entails exact monitoring ofinduction-air mass and precise meteringof fuel mass.Optimal combustion from current en-gines equipped with manifold injectionrelies on formation of a homogenousmixture as well as precise metering of theinjected fuel quantity. This makeseffective atomization essential. Failure tosatisfy this requirement will foster theformation of large droplets of condensedfuel on the walls of the intake tract and inthe combustion chamber. These dropletswill fail to combust completely and theultimate result will be higher HCemissions.
Gasoline-engine
management
8
Effects of excess-air factor λ on power P andspecific fuel consumption be.
a Rich mixture (air deficiency),b Lean mixture (excess air).
UM
K00
33E
Fig. 1
Effect of excess-air factor λ on untreatedexhaust emissions
UM
K00
32E
Fig. 2
0.8 1.0 1.2
a b
P
be
Pow
er P
,S
peci
fic fu
el c
onsu
mpt
ion
be
Excess-air factor λ0.6 1.0 1.4
Rel
ativ
e qu
antit
ies
ofC
O;
HC
; N
OX
Excess-air factor λ0.8 1.2
COHC NOX

Mixtureformation
9
Adapting to specificoperating conditionsCertain operating states cause fuelrequirements to deviate substantially fromthe steady-state requirements of an enginewarmed to its normal temperature, thusnecessitating corrective adaptations in themixture-formation apparatus. The follow-ing descriptions apply to the conditionsfound in engines with manifold injection.
Cold startingDuring cold starts the relative quantity offuel in the inducted mixture decreases: themixture “goes lean.” This lean-mixturephenomenon stems from inadequateblending of air and fuel, low rates of fuelvaporization, and condensation on thewalls of the inlet tract, all of which arepromoted by low temperatures. To com-pensate for these negative factors, and tofacilitate cold starting, supplementary fuelmust be injected into the engine.
Post-start phaseFollowing low-temperature starts,supplementary fuel is required for a briefperiod, until the combustion chamberheats up and improves the internalmixture formation. This richer mixturealso increases torque to furnish asmoother transition to the desired idlespeed.
Warm-up phaseThe warm-up phase follows on the heelsof the starting and immediate post-startphases. At this point the engine stillrequires an enriched mixture to offset thefuel condensation on the intake-manifoldwalls. Lower temperatures are synony-mous with less efficient fuel proces-sing (owing to factors such as poor mix-ing of air and fuel and reduced fuel va-porization). This promotes fuel precip-itation within the intake manifold, with the formation of condensate fuel that willonly vaporize later, once temperatureshave increased. These factors make itnecessary to provide progressive mixtureenrichment in response to decreasingtemperatures.
Idle and part-loadIdle is defined as the operating status inwhich the torque generated by the engineis just sufficient to compensate for frictionlosses. The engine does not providepower to the flywheel at idle. Part-load (orpart-throttle) operation refers to therange of running conditions between idleand generation of maximum possibletorque. Today’s standard concepts relyexclusively on stoichiometric mixtures forthe operation of engines running at idleand part-throttle once they have warmedto their normal operating temperatures.
Full load (WOT)At WOT (wide-open throttle) supple-mentary enrichment may be required. AsFigure 1 indicates, this enrichmentfurnishes maximum torque and/or power.
Acceleration and decelerationThe fuel’s vaporization potential is stronglyaffected by pressure levels inside theintake manifold. Sudden variations inmanifold pressure of the kind encounteredin response to rapid changes in throttle-valve aperture cause fluctuations in thefuel layer on the walls of the intake tract.Spirited acceleration leads to highermanifold pressures. The fuel respondswith lower vaporization rates and the fuellayer within the manifold runners expands.A portion of the injected fuel is thus lost inwall condensation, and the engine goeslean for a brief period, until the fuel layerrestabilizes. In an analogous, but inverted,response pattern, sudden decelerationleads to rich mixtures. A temperature-sensitive correction function (transitioncompensation) adapts the mixture tomaintain optimal operational responseand ensure that the engine receives theconsistent air/fuel mixture needed forefficient catalytic-converter performance.
Trailing throttle (overrun)Fuel metering is interrupted during trailingthrottle. Although this expedient savesfuel on downhill stretches, its primarypurpose is to guard the catalytic converteragainst overheating stemming from poorand incomplete combustion (misfiring).

Gasoline-engine
management
10
Ignition
FunctionThe function of the ignition system is toinitiate combustion in the compressedair/fuel mixture by igniting it at preciselythe right instant. In the spark-ignitionengine, this function is assumed by anelectric spark in the form of a short-duration discharge arc between thespark plug’s electrodes.Consistently reliable ignition is vital forefficient catalytic-converter operation.Ignition miss allows uncombusted gasesto enter the catalytic converter, leading toits damage or destruction from over-heating when these gases burn inside it.
Technical requirementsAn electrical arc with an energy content ofapproximately 0.2 mJ is required for eachsustainable ignition of a stoichiometricmixture, while up to 3 mJ may be neededfor richer or leaner mixtures. This energyis only a fraction of the total (ignition)energy contained in the ignition spark. Ifthe available ignition energy isinadequate, the mixture cannot ignitesince ignition fails to take place, and theresult is that the engine starts to misfire.This is why the system must supply levelsof ignition energy that are high enough toalways ensure reliable inflammation of theair/fuel mixture, even under the mostsevere conditions. A small ignitablemixture cloud passing by the arc isenough to initiate the process. Themixture cloud ignites and propagatescombustion through the remainingmixture in the cylinder. Efficient mixtureformation and easy access of the mixturecloud to the spark will improve ignitionresponse, as will extended sparkdurations and larger electrode gaps(longer arcs). The location and length ofthe spark are determined by the sparkplug’s design dimensions. Spark durationis governed by the design and con-figuration of the ignition system along withthe instantaneous ignition conditions.
Ignition timing
Ignition timing and its adjustmentApproximately two milliseconds elapsebetween the instant when the mixtureignites and its complete combustion.Assuming consistent mixture strength,this period will remain invariable. Thismeans that the ignition spark must arcearly enough to support generation ofoptimal combustion pressure under alloperating conditions.Standard practice defines ignition timingrelative to top dead center, or TDC on thecrankshaft. Advance angles are thenquantified in degrees before TDC, withthe corresponding figure being known asthe ignition (timing advance) angle.Moving the ignition point back towardTDC is referred to as “retarding” thetiming and displacing it forward toward anearlier ignition (firing) point is “advancing”it (Figure 1).Ignition timing must be selected so thatthe following criteria are complied with:– Maximum engine power,– Maximum fuel economy,– Prevention of engine knock, and– “Clean” exhaust gas.
BDC
TDCZ
Position of crankshaft and piston at theignition (firing) point with advanced ignition
TDC Top Dead Center, BDC Bottom Dead Center,Z Ignition point.
UM
Z01
55E
Fig. 1

It is impossible to fulfill all the abovedemands simultaneously, and a com-promise must be reachd from case tocase. The most favorable firing point at agiven torque depends upon a variety ofdifferent factors. These are in particular,engine speed, engine load, enginedesign, fuel, and the particular operatingconditions (e.g. starting, idle, WOT,overrun).Engine knock is due to the abruptcombustion of portions of the air-fuelmixture which have not yet been reachedby the advancing flame front triggered bythe ignition spark. In this case, the firingpoint is too far advanced. Combustionknock not only leads to increases incombustion-chamber temperature, whichin turn can cause pre-ignition, but also tomarked increases in pressure. Suchabrupt ignition events generate pressureoscillations which are superimposed onthe normal pressure characteristic (Fig. 2). Today, the high compressions employedin spark-ignition engines involve a fargreater risk of combustion knock thanwas the case with the compression ratioswhich were common in the past. Onedifferentiates between two different formsof “knock”:
– Acceleration knock at low enginespeeds and high load (clearly audibleas pinging), and
– High-speed knock at high enginespeeds and high load.
For the engine, high-speed knock is aparticularly critical factor, since the otherengine noises generated at such speedsmake it inaudible. This is why audibleknock is not a faithful index of preignitiontendency. At the same time, electronicmeans are available for precisedetection. Consistent knock causessevere engine damage (destruction ofcylinder-head gaskets, bearing damage,“holed” piston crowns) as well as spark-plug damage.Preignition tendency depends upon suchfactors as engine design (for instance:combustion chamber layout, homo-genous air-fuel mixture, efficient in-duction flow passages) and fuel quality.
Ignition timing and emissionsThe effects of the excess-air factor λ andignition timing on specific fuel consump-tion and exhaust emissions are dem-onstrated in Figures 3 and 4. Specific fuel consumption responds to leanermixtures with an initial dip before rising
Ignition
11
Combustion-chamber pressure curves for different firing points
1 Ignition Za with ideal advance,2 Ignition Zb advanced too far (knock),3 Ignition Zc too late.
Effect of excess-air factor λ and ignitiontiming αZ on fuel consumption
Fig. 2 Fig. 3
αz20o
30o
40o
50o
g/kWh
580
500
420
340
Spe
cific
fuel
con
sum
ptio
n
0.8 1.0 1.2 1.4Excess-air factor λ
660
UM
K01
40E
bar
40
20
075o 50o 25o 0o – 25o – 50o– 75o
Before TDC After TDC
Com
bust
ion-
cham
ber
pres
sure
Ignition angle αZ
21
3
60
ZbZa Zc
UM
Z00
01E

from λ = 1.1...1.2. Increases in the excess-air factor are accompanied by a corre-sponding increase in the optimal ignitionadvance angle, which is defined here asthe timing that will minimize specific fuelconsumption. The relationship betweenspecific fuel consumption and excess-airfactor (assuming optimal ignition timing)can be explained as follows: The airdeficiency encountered in the “fuel-rich”range leads to incomplete combustion,while substantial shifts toward the leanmisfire limit (LML) will start to causedelayed combustion and misfiring, ulti-mately leading to higher levels of specificfuel consumption. The optimal ignitionadvance angle increases at higher ex-cess-air ratios owing to the slower rate offlame-front propagation enountered inlean mixtures; the ignition timing must beadvanced to compensate for thesedelays.
HC emissions, which bottom out at λ = 1.1,display a similar response pattern. Theinitial rise within the lean range can beattributed to the flame being extinguisheddue to the cooling on the walls of thecombustion chamber. Extremely leanmixtures produce delayed combustionand failure to ignite, phenomena whichoccur with increasing frequency as thelean misfire limit is approached. Below λ =1.2, further ignition advance will lead tohigher HC emissions, but it will also shiftthe lean misfire limit to accomodatemixtures with even less fuel. This is why anincrease in ignition advance lowers thelevels of HC emissions in the lean rangebeyond λ = 1.25.Emissions of nitrous oxides (NOx) displaya completely different pattern by rising inresponse to higher oxygen (O2) con-centrations and maximum peak com-bustion temperatures. The result is thecharacteristic bell-shaped curve for NOx
emissions. These rise up to λ ≈ 1.05 inresponse to the accompanying increasesin O2 concentrations and peakcombustion temperatures. Then, beyondλ = 1.05, NOx generation displays asharp drop as the mixture continuesfurther into the lean range, owing to the
Gasoline-engine
management
12
Excess-air factor λ and ignition timing αZon exhaust emissions
g/kWh
16
12
8
4
0
HC
em
issi
ons
(FID
)N
OX
em
issi
ons
g/kWh
g/kWh
800
600
400
200
0
CO
em
issi
ons
20
16
12
8
4
0
0.8 1.2 1.4
αz 50°
40°
30°
20°
0.8 1.0 1.2 1.4Excess-air factor λ
0.8 1.0 1.2 1.4Excess-air factor λ
αz50°40°
30°
20°
1.0Excess-air factor λ
αz
50°
40°30°
20°
Fig. 4
UM
K01
36E

rapid reduction in peak temperatures thataccompanies higher levels of mixturedilution. This response pattern alsoaccounts for the extreme sensitivity withwhich NOx emissions respond tochanges in ignition timing, escalatingsharply as advance is increased.Because a mixture of λ = 1 is needed toimplement emissions-control conceptsrelying on the 3-way catalytic converter,adjusting the ignition advance angle isthe only remaining option for optimizingemissions.
Inductive ignition systems
The spark-ignition engine’s inductive(coil) ignition system generates the high-tension voltage to provide the energythen employed to create an arc at thespark plug. While inductive ignitionsystems rely on coils to store ignitionenergy, an available alternative is storagein a condenser (R so-called high-voltagecapacitor-discharge ignition/CDI). Theinductive ignition circuit’s componentsare the driver (output amplifier) stage, thecoil and the spark plug
Ignition coil
FunctionThe ignition coil stores the requiredignition energy and generates the highvoltages required to produce an arc atthe firing point.
Design and functionIgnition-coil operation is based on aninductive concept. The coil consists oftwo magnetically coupled copper coils(primary and secondary windings). Theenergy stored in the primary winding’smagnetic field is transmitted to thesecondary side. Current and voltage aretransformed in accordance with the turnsratio of the primary and secondarywindings (Fig. 1).
Modern ignition coils feature an iron core,composed of individual metal platesinside a synthetic casing. Within thiscasing the primary winding is woundaround a bobbin mounted directly on thecore. These elements are concentricallyenclosed by the secondary winding,which is designed as a disc or chamberwinding for improved insulation resis-tance. For effective insulation of core andwindings, these elements are all en-closed in epoxy resin inside the casing.Specific design configurations areselected to reflect individual operationalrequirements.
Ignition driver stage
Assignment and functionIgnition driver stages featuring multi-stage power transistors switch the flow ofprimary current through the coil,replacing the contact-breaker pointsemployed in earlier systems.In addition, this ignition driver stage isalso responsible for limiting primarycurrent and primary voltage. The primaryvoltage is limited to prevent excessivelysteep increases of secondary voltage,
Ignition coils (schematic)
Rotating distribution: a Single-spark coil.Static distribution: b Single-spark coil, c Dual-spark coil.
Inductiveignition systems
13
a b c
15 15 154a
1 1 14 4b
4a
4
Fig. 1U
MZ
0257
-1Y

which could damage components withinthe high-tension circuit. Restrictions onprimary current hold the ignition system’senergy output to the specified level. The ignition system’s driver stage may beinternal (integrated within the ignitionECU) or external (mounted locally).
High-voltage generationThe ignition ECU switches on the ignitiondriver stage for the calculated dwellperiod. It is within this period that theprimary current within the coil climbs toits specified intensity.The energy for the ignition system isstored in the coil’s magnetic field anddefined by the levels of the coil’s primarycurrent and primary inductance. At the firing point the ignition driver stageinterrupts the current flow through theprimary winding to induce flux in themagnetic field and generate secondaryvoltage in the coil’s secondary winding.The ultimate level of secondary voltage(secondary voltage supply) dependsupon a number of factors. These includethe amount of energy stored in theignition system, the capacity of thewindings and the coil’s transformationratio as well as the secondary load factorand the restrictions on primary voltageimposed by the ignition system’s driverstage. The secondary voltage must alwaysexceed the level required to produce anarc at the spark plug (ignition-voltagerequirement), and the spark energy mustalways be high enough to reliably initiatecombustion in the mixture, even in theface of secondary arcing.When primary current is switched on, thisinduces an undesired voltage (switch-onvoltage) of roughly 1...2 kV in thesecondary winding whose polarityopposes that of the high voltage. It isessential that this is prevented fromgenerating an arc (switch-on arc) at thespark-plug.In systems with conventional rotatingvoltage distribution, this switch-on sparkis effectively suppressed by thedistributor’s spark gap. On distributorlessignition systems with non-rotating (static)
voltage distribution featuring dedicatedignition coils, a diode in the high-voltagecircuit performs this function.With distributorless (static) sparkdistribution and dual-spark coils, the higharcing voltage associated with two sparkplugs connected in series effectivelysuppresses the switch-on spark withoutany need for supplementary counter-measures.
Voltage distribution
High-tension voltage must be on hand atthe spark plug at the moment of ignition(firing point). This function is theresponsibility of the high-voltage distri-bution system.
Rotating voltage distributionSystems using a rotating voltage-distribution concept rely on a mechanicalignition distributor to relay the highvoltage from a single ignition coil to theindividual cylinders. This type of voltage-distribution has ceased to be relevant inthe current generation of engine-management systems.
Static voltage distributionDistributorless ignition (otherwise knownas static or electronic ignition) is availablein two different versions:
System equipped with single-sparkignition coilsEach cylinder is equipped with its ownignition coil and driver stage, which theengine-management ECU triggerssequentially in the defined firing order.Because internal voltage loss within adistributor is no longer a consideration,the coils can be extremely compact. Thepreferred installation location is directlyabove the spark plug. Static distributionwith single-spark ignition coils isuniversally suited for use with anynumber of cylinders. While there are noinherent restrictions on adjusting ignitionadvance (timing), these units do require asupplementary synchronization arrange-ment furnished by a camshaft sensor.
Gasoline-engine
management
14

System equipped with dual-sparkignition coilsEach set of two cylinders is supplied by asingle ignition driver stage and one coil,with each end of the latter’s secondarywinding being connected to a differentspark plug. The cylinders are paired sothat the compression stroke on one willcoincide with the exhaust stroke on theother.When the ignition fires an arc isgenerated at both spark plugssimultaneously. Because it is importantto ensure that the spark produced duringthe exhaust stroke will ignite neitherresidual nor fresh incoming gases, thissystem is characterized by restrictions onadjusting ignition advance (timing). Thissystem does not require a syn-chronization sensor at the camshaft.
Connectors and interference suppressors
High-voltage cablesThe high voltage from the ignition coilmust be able to reach the spark plugs.On coils not mounted in direct electricalcontact with the spark plugs this functionis performed by special high-voltagecables featuring outstanding high-voltage strength and synthetic insulation.Fitted with the appropriate terminals,these cables provide the electricalconnections between the high-voltagecomponents.Because every high-voltage lead re-presents a capacitive load for the ignitionsystem and reduces the available supplyof secondary voltage accordingly, cablesshould always be as short as possible.
Interference resistors, interferencesuppressionThe pulse-shaped, high-tension dis-charge that characterizes every arc at thespark plug also represents a source ofradio interference. The current peaksassociated with discharge are limited bysuppression resistors in the high-voltagecircuit. To hold radiation of interference
emanating from this circuit to a minimum,the suppression resistors should beinstalled as close as possible to theactual interference source.Resistors (capacitors) for interferencesuppression are generally installed in thespark-plug cable terminals, while rotatingdistributors also include rotor-mountedresistors. Spark plugs with integralsuppression resistors are also available.It is important to remember that higherlevels of resistance in the secondarycircuit are synonymous with cor-responding energy loss in the ignitioncircuit, and result in a reduction in theenergy available for firing the spark plug.Partial or comprehensive encapsulationof the ignition system can be im-plemented to obtain further reductions ininterference radiation.
Spark plug
The spark plug creates the electrical arcthat ignites the air-fuel mixture within thecombustion chamber. The spark plug is a ceramic-insulated,high-voltage conductor leading into thecombustion chamber. Once arcingvoltage is reached, electrical energyflows between the center and groundelectrodes to convert the remainder ofthe ignition-coil energy into a spark.
The level of the voltage required forignition depends upon a variety of factorsincluding electrode gap, electrodegeometry, combustion-chamber pres-sure, and the instantaneous A/F ratio atthe firing point.Spark-plug electrodes are subject towear in the course of normal engineoperation, and this wear leads toprogressively higher voltage require-ments. The ignition system must becapable of providing enough secondaryvoltage to ensure that adequate ignitionvoltage always remains available,regardless of the operating conditionsencountered in the intervals betweenspark-plug replacements.
Inductiveignition systems
15

Carburetors and gasoline-injection sys-tems are designed for a single purpose:To supply the engine with the optimal air-fuel mixture for any given operatingconditions. Gasoline injection systems,and electronic systems in particular, arebetter at maintaining air-fuel mixtureswithin precisely defined limits, whichtranslates into superior performance inthe areas of fuel economy, comfort andconvenience, and power. Increasinglystringent mandates governing exhaustemissions have led to a total eclipse of thecarburetor in favor of fuel injection.Although current systems rely almostexclusively on mixture formation outsidethe combustion chamber, concepts basedon internal mixture formation – with fuelbeing injected directly into the combustionchamber – were actually the foundationfor the first gasoline-injection systems. Asthese systems are superb instruments forachieving further reductions in fuelconsumption, they are now becoming anincreasingly significant factor.
Overview
Systems withexternal mixture formationThe salient characteristic of this type ofsystem is the fact that it forms the air-fuelmixture outside the combustion chamber,inside the intake manifold.
Multipoint fuel injectionMultipoint fuel injection forms the idealbasis for complying with the mixture-formation criteria described above. In thistype of system each cylinder has its owninjector discharging fuel into the areadirectly in front of the intake valve.
Representative examples are the variousversions of the KE and L-Jetronic systems(Figure 1).
Mechanical injection systemsThe K-Jetronic system operates byinjecting continually, without an exter-nal drive being necessary. Instead ofbeing determined by the injection valve,fuel mass is regulated by the fueldistributor.
Combined mechanical-electronicfuel injectionAlthough the K-Jetronic layout served asthe mechanical basis for the KE-Jetronicsystem, the latter employs expandeddata-monitoring functions for moreprecise adaptation of injected fuelquantity to specific engine operatingconditions.
Electronic injection systemsInjection systems featuring electroniccontrol rely on solenoid-operated injection
Multipoint fuel injection (MPI)
1 Fuel,2 Air,3 Throttle valve,4 Intake manifold,5 Injectors,6 Engine.
Gasoline-injection systems
3
2
5
6
4
1
Fig. 1U
MK
0662
-2Y
Gasoline-injectionsystems
16

valves for intermittent fuel discharge. Theactual injected fuel quantity is regulatedby controlling the injector's opening time(with the pressure-loss gradient throughthe valve being taken into account incalculations as a known quantity).Examples: L-Jetronic, LH-Jetronic, andMotronic as an integrated engine-manage-ment system.
Single-point fuel injectionSingle-point (throttle-body injection (TBI))fuel injection is the concept behind thiselectronically-controlled injection systemin which a centrally located solenoid-operated injection valve mountedupstream from the throttle valve spraysfuel intermittently into the manifold. Mono-Jetronic and Mono-Motronic are theBosch systems in this category (Figure 2).
Systems for internal mixture formationDirect-injection (DI) systems rely onsolenoid-operated injection valves to sprayfuel directly into the combustion chamber;the actual mixture-formation process takesplace within the cylinders, each of whichhas its own injector (Figure 3). Perfectatomization of the fuel emerging from theinjectors is vital for efficient combustion.Under normal operating conditions, DIengines draw in only air instead of the
combination of air and fuel common toconventional injection systems. This is oneof the new system's prime advantages: Itbanishes all potential for fuel condensationwithin the runners of the intake manifold.External mixture formation usuallyprovides a homogenous, stoichiometric air-fuel mixture throughout the entirecombustion chamber. In contrast, shiftingthe mixture-preparation process into thecombustion chamber provides for twodistinctive operating modes:With stratified-charge operation, only themixture directly adjacent to the spark plugneeds to be ignitable. The remainder of theair-fuel charge in the combustion chambercan consist solely of fresh and residualgases, without unburned fuel. This strategyfurnishes an extremely lean overall mixturefor idling and part-throttle operation, withcommensurate reductions in fuelconsumption.Homogenous operation reflects theconditions encountered in external mixtureformation by employing uniformconsistency for the entire air-fuel chargethroughout the combustion chamber.Under these conditions all of the fresh airwithin the chamber participates in thecombustion process. This operationalmode is employed for WOT operation.MED-Motronic is used for closed-loopcontrol of DI gasoline engines.
Overview
17
Throttle-body fuel injection (TBI)
1 Fuel,2 Air,3 Throttle valve,4 Intake manifold,5 Injector,6 Engine.
3
2
5
6
4
1
UM
K06
63-2
Y
Fig. 2
Direct fuel injection (DI)
1 Fuel,2 Air,3 Throttle valve
(ETC), 4 Intake manifold,5 Injectors,6 Engine.
3
2
5
6
4
1
UM
K16
87-2
Y
Fig. 3

The overall MotronicsystemSystem overviewThe Motronic system contains all of theactuators (servo units, final-controlelements) required for intervening in thespark-ignition engine management,while monitoring devices (sensors)register current operating data for engineand vehicle. These sensor signals arethen processed in the input circuitry of acentral electronic control unit (ECU)before being transferred to the ECUmicroprocessor (function calculator). Theinformation provided (Figs. 1 and 2)includes data on:– Accelerator-pedal travel,– Engine speed,– Cylinder charge factor (air mass),– Engine and intake-air temperatures,– Mixture composition, and – Vehicle speed.The microprocessor employs these dataas the basis for quantifying driverdemand, and responds by calculating theengine torque required for compliancewith the driver’s wishes. Meanwhile, thedriver or a transmission-shift controlfunction selects the conversion rationeeded to help define engine speed. The microprocessor generates therequired actuator signals as the firststage in setting the stipulated operatingstatus. These signals are then amplifiedin the driver circuit and transmitted to the actuators responsible for enginemanagement. By ensuring provision ofthe required cylinder charge togetherwith the corresponding injected fuelquantity, and the correct ignition timing,the system furnishes optimal mixtureformation and combustion.
ME versionThe following descriptions focus on atypical version of ME-Motronic. Within thetype designation, the letter “M” stands for the classical Motronic function ofcoordinated control for injection andignition, while “E” indicates integration ofthe ETC electronic throttle control.
Basic functionsMotronic’s primary function is toimplement the engine’s operationalstatus in line with the driver’s demands.The system’s microprocessor respondsto this demand by translating theaccelerator-pedal travel into a specifiedengine output. When converting therequired engine-output figure to theparameters for actually controllingengine output, that is– The density of the cylinders’ air charges,– The mass of the injected fuel, and– The ignition timing, the system takes into account theextensive range of current operating dataas monitored by its sensors:
Auxiliary functionsME-Motronic complements these basicfunctions with a wide spectrum ofsupplementary open and closed-loopcontrol functions, including:– Idle-speed control,– Lambda closed-loop air-fuel mixture
control,– Control of the evaporative-emissions
control system,– Exhaust-gas recirculation (EGR) for
reductions in NOX emissions,– Control of the secondary-air injection to
reduce HC emissions, and– Cruise control. These secondary functions have beenrendered essential by a combination of
ME–Motronic
18
ME-Motronic engine management

factors. While these include legal man-dates for reduced exhaust emissions anda continued demand for further en-hancements of fuel economy, they alsoembrace higher expectations now direct-ed toward safety and driving comfort.The system can also be expanded toincorporate the following supplements:– Turbocharger and intake-manifold
geometry-control functions (R toenhance power output),
– Camshaft control for engines withvariable valve timing (R to enhancepower output while simultaneouslyreducing both fuel consumption andexhaust emissions), and
– Knock control, and engine-speedcontrol and vehicle-speed control (R toprotect engine and vehicle).
Torque-based control conceptThe prime objective behind this torque-control strategy is to correlate this large andhighly variegated range of objectives. Thisis the only way to allow flexible selection ofindividual functions for integration in theindividual Motronic versions according toengine and vehicle type.
Torque coordinationMost of the above auxiliary open andclosed-loop control functions exercise afeedback effect on engine torque. Thisfrequently leads to the simultaneous ap-pearance of mutually conflicting demands.
In a torque-based system, all of thesefunctions reflect the driver’s behavior inthat they demand a specific engine torque.ME-Motronic’s flexible-response torque-based control system can prioritize thesemutually antagonistic requirements andimplement the most important ones. Thisis the advantage of the torque-basedstructure. All functions submit individualand independent requests for torque.
Vehicle managementThe CAN (Controller Area Network) bussystem allows Motronic to maintaincommunications with the various controlunits governing other systems in thevehicle. One example of this cooperationis the way Motronic operates with theautomatic transmission’s ECU toimplement torque reductions during gearchanges, thus reducing wear on thetransmission. If TCS (traction controlsystem) is installed, its ECU responds towheelslip by transmitting the cor-responding data to the Motronic unit,which then reduces engine torque.This is yet another benefit resulting fromflexible torque-based control.
Diagnosis (OBD)ME-Motronic is complemented by com-ponents designed for on-board mon-itoring (OBD), allowing it comply with thestringent emissions limits and the stip-ulations for integrated diagnosis.
Overallsystem
19
ME-Motronic – Schematic diagram
UM
K16
78E
Fig. 1
ADC
Function processor
RAM
Flash-EPROM
EEPROM
Moni-toring com-puter
Accelerator-pedal travel
Air mass
Engine temperature
Battery voltage
Throttle-valve aperture
Camshaft position
Intake-air temperature
Crankshaft speed and TDC
Knock intensity
Lambda oxygensensor
Transmission gear
12
Lambda oxygen-sensor heaterCamshaft control
Fuel-pump relay
Main relay
Tachometer
ETC actuator
Spark plugs
Injectors
Intake-manifold runner controlTank ventilation system
Secondary-air injectionExhaust-gas recirculation (EGR)
21
Vehicle speed
DiagnosisCAN

ME
–Motronic20
ME
-Mo
tron
ic system d
iagram
UMK1674Y
Fig. 2
���������������
CAN
1
2
10
17
18
19
20
1112 13
16
14
21
242322
3
4
5
6
7
8
9
15
16
ME-Motronic engine management ME7 (Example)
1 Activated-charcoal canister,2 Check valve,3 Canister-purge valve,4 Intake-manifold pressure sensor,5 Fuel rail/Injector,6 Ignition coil/Spark plug,7 Phase sensor,8 Electric secondary-air injection pump,9 Secondary-air injection valve,10 Air-mass meter,11 Throttle-valve assembly (ETC),12 EGR valve,13 Knock sensor,14 RPM sensor,15 Temperature sensor,16 Lambda oxygen sensor,17 Electronic control unit (ECU),18 Diagnosis interface,19 Diagnosis lamp,20 Vehicle immobilizer,21 Tank pressure sensor,22 In-tank pump assembly,23 Accelerator-pedal module,24 Battery.

Cylinder-charge control systems
Throttle-valve controlOn spark-ignition engines with externalmixture formation, the prime factordetermining output force and thus poweris the cylinder charge. The throttle valvecontrols cylinder charge by regulating theengine’s induction airflow.
Conventional systemsConventional layouts rely on mechanicallinkage to control the throttle valve. ABowden cable or linkage rod(s) translateaccelerator-pedal travel into throttle-valve motion.To compensate for the cold engine’shigher levels of internal friction, a largerair mass is required and supplementaryfuel must be injected. Increased air flowis also required to balance drive-powerlosses when ancillaries such as air-conditioning compressors are switchedon. This additional air requirement canbe met by an air-bypass actuator, whichcontrols a supplementary air streamrouted around the throttle valve (Figure2). Yet another option is to use a throttle-valve actuator designed to respond todemand fluctuations by readjusting thethrottle valve’s minimum aperture. In both
cases, the scope for electronicmanipulation of airflow to meetfluctuating engine demand is limited tocertain functions, such as idle control.
Systems with ETCIn contrast, ETC (electronic throttlecontrol) employs an ECU to controlthrottle-valve travel. The throttle valveforms a single unit along with the throttle-valve actuator (DC motor) and thethrottle-valve angle sensor: This is thethrottle-valve assembly (Figure 1).Two mutually-opposed potentiometersmonitor accelerator-pedal travel as thebasis for controlling this type of throttle-
Cylinder-charge controlsystems
21
ETC system
Fig. 1
UM
K16
27E
Principle of air control using air bypass valve
1 Idle valve (bypass valve), 2 ECU, 3 Throttle valve, 4 Bypass tract.
Fig. 2
UM
K16
77Y
Engine-management ECUAccelerator-pedal module Throttle-valve assembly
M
CAN
Sensors Actuators
Monitoringmodule
C
1
4
2
3
UBnTMαD/AC
DK

valve assembly. The ECU calculates thethrottle-valve aperture that correspondsto the driver’s demand, makes anyadjustments needed for adaptation to theengine’s current operating conditions,and then generates a correspondingtrigger signal for transmission to thethrottle-valve actuator. The throttle-valvetravel sensor with its two mutually-opposed potentiometers permits preciseand accurate response to positioningcommands.The dual-potentiometer setup at thethrottle valve is complemented by dualpotentiometers to monitor acceleratorpedal travel; this arrangement serves asan integral part of the overall ETCmonitoring function by furnishing thedesired system redundancy. Thissubsystem continuously checks andmonitors all sensors and calculations thatcan affect throttle-valve aperturewhenever the engine is running. Thesystem’s initial response to malfunctionsis to revert to operation based onredundant sensors and process data. If noredundant signal is available, the throttlevalve moves into its default position.The ME-Motronic system integrates ETCcontrol within the same engine-
management ECU used to govern theignition, injection and numerous auxiliaryfunctions. This renders retention of aspecial dedicated ECU for ETCunnecessary. Figure 3 shows thecomponents in an ETC system.
Gas-exchange controlAlthough throttle-valve controlrepresents the primary method ofregulating the flow of fresh air into theengine, a number of other systems arealso capable of adjusting the mass offresh and residual gases in the cylinder:– Variable valve timing on both the intake
and exhaust sides,– Exhaust-gas recirculation (EGR),– Variable-geometry intake manifold
(dynamic boost), and– Exhaust-gas turbocharger.
Variable valve timingIn defining valve timing it is important torecognize that fluctuations in factors suchas engine speed and throttle-valve angleinduce substantial variations in the flowpatterns of the gas columns streaminginto and out of the cylinder. This meansthat when invariable (fixed) valve timing
ME–Motronic
22
ETC components
1 DV-E5 throttle-valve assembly,2 Engine-management ECU,3 Accelerator-pedal module (FPM).
Fig. 3
UM
K16
28Y
1 2 3

is used the gas-exchange process canonly be optimized for a single operatingstatus. In contrast, variable valve timingcan be employed to adapt gas flow tovarious engine speeds.
Camshaft adjustmentIn conventional engines a chain ortoothed timing belt serves as themechanical link between the crankshaftand camshaft(s). On engines withadjustable camshaft, at least the angle ofthe intake-camshaft relative to thecrankshaft can be varied. Nowadays,adjustment of both intake and exhaustcamshafts relative to the crankshaft isbeing increasingly encountered. Theadjustment process relies on electric orelectrohydraulic actuators. Figure 4shows how the open phase of the intakevalve “shifts” relative to TDC when theintake camshaft’s timing is modified. Oneoption is to turn the camshaft to retardthe “intake opens/closes” phase at idle toreduce residual gases and obtainsmoother idling.At high engine speeds the intake valve’sclosing point can be delayed to obtainmaximum charge volumes. The sameobjective can be achieved at low tomoderate engine speeds and/or inspecific part-throttle ranges by varyingthe timing of the intake camshaft andshifting the entire intake cam-phaseforward (advanced “intake opens/closes”).
Selective camshaft-lobe controlSystems with selective camshaft-lobecontrol modify valve timing by alternatelyactivating cam lobes with two differentramp profiles.The first lobe furnishes optimal valvetiming and lift for intake and exhaustvalves at the low end and in the middle ofthe engine’s operating range.A second cam lobe is available forincreased valve lift and extended phasedurations. This lobe is activated when therocker arm to which it is connected locksonto the standard rocker arm once theengine crosses a specific speedthreshold (Figure 5).Infinitely-variable valve timing and valve-lift adjustment represents the optimum,but it is very complicated. This conceptemploys extended cam lobes featuringthree-dimensional ramp profiles in con-junction with linear shifts in camshaftposition, and grants maximum latitude forperfecting engine performance (Figure 6).This strategy can be used to obtainsubstantial torque increases throughoutthe engine’s operating range.
Exhaust-gas recirculation (EGR)Variable valve timing, as alreadymentioned in the section covering thissubject, represents one way ofinfluencing the mass of the residual gasremaining in the cylinder followingcombustion; this process is referred to as“internal” EGR.
Cylinder-charge controlsystems
23
Intake-camshaft rotation
1 Late, 2 Standard, 3 Early.
Selective lobe activation
1 Standard, 2 Auxiliary lobe
Fig. 4 Fig. 5
UM
M04
46-1
E
UM
M04
47-!
E
300° 360° 420° 480° 540° 600°TDC BDC
0
Str
oke
s
Intake(adjustable)
Exhaust(invari-able)
1
Crankshaft
2
3
Crankshaft
240° 360° 480° 600°BDC
0
Str
oke
s
Intake(adjustable)
Exhaust(adjustable)
TDCBDC120°
1
1
22

ME–Motronic
24
Exhaust-gas recirculation (example)
1 Exhaust-gas recirculation (EGR),2 Electropneumatic converter,3 EGR valve,4 ECU,5 Air-mass meter.n Engine speed.
Infinitely-variable valve timing and lift
a Minimum lift,b Maximum lift.
UM
K09
13-1
YU
MM
0448
-2Y
Fig. 7Fig. 6
a b
1 1
2
3
4
5
n

Another option available for varying theproportion of residual gases is to apply“external” EGR. Motronic controls thisprocess by modifying the EGR valve’s liftto reflect current engine operatingconditions (Figure 7). The EGR systemtaps into the exhaust and, via the EGRvalve, diverts a portion of the gases backinto the fresh mixture. This is how theEGR valve defines the residual-gascomponent in the cylinder charge.Exhaust-gas recirculation is an effectiveway to reduce emissions of nitrous oxides.Adding previously combusted exhaustgases to the fresh air-fuel mixture lowerspeak combustion temperatures, andbecause generation of nitrous oxides istemperature-sensitive, NOX emissionsare reduced at the same time.Assuming that the mass of the fresh-aircharge remains constant, the overallcharge will increase when exhaust gas isrecirculated. This means the engine willproduce the same torque at wider throttle-valve apertures (less throttling effect). Theresult is enhanced fuel economy.
Dynamic pressure-charging Because maximum possible torque isproportional to fresh-gas cylinder charge,maximum torque can be raised bycompressing the intake air before it entersthe cylinder.The gas-exchange process is notgoverned solely by valve timing; intakeand exhaust-tract configuration are alsoimportant factors. Periodic pressurewaves are generated inside the intakemanifold during cylinder intake strokes.These pressure waves can be exploited toboost the fresh-gas charge and maximizepossible torque generation.Intake manifolds for multipoint injectionsystems consist of individually tunedrunners and the plenum chamber with itsthrottle valve. Careful selection of thelength and diameter of runners and ofplenum chamber dimensions can beemployed to exploit pressure waves in theair traveling through the intake tract. Thisstrategy can be used to increase thedensity – and with it the mass – of thefresh-gas charge.
Intake wave ram effectThe pressure waves generated by thereciprocating piston propagate throughthe intake runners and are reflected attheir ends. The idea is to adapt the lengthand diameter of the runners to the valvetiming in such a way that a pressure peakreaches the intake valve just before itcloses. This supplementary pressuriza-tion effect increases the mass of thefresh gas entering the cylinder.
Resonance pressure chargingResonance boost systems employ shortrunners as links between groups ofcylinders with equal ignition intervals andresonance chambers. These, in turn, areconnected via resonance tubes to theatmosphere or a plenum chamber, allow-ing them to act as Helmholtz resonators(Figure 8). Sometimes the requiredplenum volumes are considerable, andthe resulting storage effect can have anegative influence on dynamic response(in the form of mixture vacillation duringsudden changes in load).
Cylinder-charge controlsystems
25
Resonance boost
a Layout, b Air flow path.1 Resonance tube, 2 Resonance chamber, 3 Cylinder, 4 With resonance boost,5 With standard intake manifold.
Fig. 8
UM
M04
53E
Engine speed n
Cha
rge
dens
ity
λ a1
1
2
3
4
5
a
b
Engine

Variable-geometry intake manifoldBoth of the dynamic charge-flow en-hancement concepts described aboveare suitable for increasing the maximumavailable charge volume, especially atthe low end of the engine-speed range.
However, the variable-geometry intakemanifold (selective intake-tract activation)can be used to obtain a virtually idealtorque curve. This concept opens upnumerous possibilities, with adaptiveresponse to variations in such factors asengine load factor, engine speed andthrottle-valve angle:– Adjustment of runner length,– Alternation between different runners
of varying lengths and diameters,– Selective deactivation of individual
runners leading to individual cylindersin multitract systems, and
– Alternating selection of differentplenum-chamber volumes.
ME–Motronic
26
Variable-geometry intake systems
Switchable: a two-stage, b three-stage.A, B Cylinder groups: 1, 2 Flaps,engine speed determines opening point.
UM
M04
54Y
Brake mean effective pressure (bmep) overengine speed for three different lengths of aninfinitely-variable intake system
L1 Effective intake-runner length,D1 Intake-runner diameter.
Fig. 11
UM
K09
11-2
E
Infinitely-variable-length intake system
1 Fixed housing,2 Rotating drum (air distributor),3 Drum air-entry orifice,4 Intake runner air-entry orifice,5 Seal (e.g., leaf spring),6 Intake runners,7 Intake valve,8 Induction air flow.
Fig. 10
UM
K09
10-2
Y
a
b
A B
1
A
B
21
1
min–12,000 4,000
Engine speed n
7
8
9
10
11
Bra
ke m
ean
effe
ctiv
e pr
essu
re p
me
L1= 640mm, D1=36 mmL1= 950mm, D1=36 mm
L1= 330mm, D1= 40mm
12
bar
1
23
4
5
6 7
8
Fig. 9

For switching such variable-geometry air-intake systems, as engine speed variesflaps or similar devices are used to openand close the connections between thegroups of cylinders (Fig. 9).At low rpm the variable-length intakerunners operate in combination with theinitial resonance chamber. The length ofthe runners is then subjected to ongoingmodification as engine speed risesbefore the process culminates in theopening of a second resonance chamber(Figure 10).Figure 11 provides an index of air-flowefficiency by illustrating how variableintake-manifold geometry influencesbrake mean effective pressure (bmep) asa function of engine speed.
Exhaust-gas turbochargingYet another and even more effectiveoption in the quest for higher induction-gas density levels is to install asupercharging device. Among thefamiliar techniques for furnishing forcedinduction on spark-ignition engines, themost widespread is turbocharging.Turbocharging makes it possible toextract high torques and powers fromengines with minimal piston displace-ment by running them at high levels ofvolumetric efficiency. Compared to natur-ally-aspirated engines, if we presumeidentical power outputs, it is the turbo-charged powerplant’s lower weight andmore compact dimensions that representits salient advantages.Until recently turbochargers wereprimarily viewed as a way to raise power-to-weight ratios, but today the focus is shifting toward achieving torqueincreases in the low and mid-rangesectors of the engine’s rev spectrum.This strategy is very often applied inconjunction with electronic boost-pressure control.The exhaust-gas turbocharger’s primarycomponents are the impeller and theturbine, which are mounted at oppositeends of a common shaft.The energy employed to drive theturbocharger is extracted from theengine’s exhaust stream. Although, on
the one hand, this process exploitsenergy that in naturally-aspiratedengines would otherwise be wasted(owing to the inherent expansion limitsimposed by the crankshaft assembly), onthe other, the turbo process generateshigher exhaust back-pressures as theprice for impeller power.The exhaust turbine converts a portion ofthe exhaust-gas’ energy into rotationalenergy to drive the impeller, which drawsin fresh air before compressing it anddispatching it through the intercooler,throttle-valve and intake manifold on itsway to the engine.
Turbocharger boost-control actuatorEven at the bottom end of the rev range,passenger-car engines are expected toproduce high torque. In response, turbinehousings are basically designed forefficient operation with modest exhaust-gas mass flow rates, i.e., for WOT as lowas n ≤ 2,000 min–1.To prevent the turbocharger fromoverboosting the engine when theexhaust-gas stream rises to higher massflow rates, the unit must incorporate abypass valve. This bypass valve, or
Cylinder-charge controlsystems
27
Cross section of a Roots-type supercharger
1 Housing,2 Rotor.
Fig. 12U
MM
0509
Y
2
1

wastegate, diverts a portion of theexhaust gases in these higher ranges,routing them around the turbine andfeeding the gas back into the exhaustsystem on the other side. This bypassvalve is generally a flap valve integratedwithin the turbine housing, although lessfrequently it is in the form of a plate valvein a separate casing parallel to theturbine.
Mechanical superchargingThe motive force used to power themechanical compressor is taken directlyfrom the IC engine. Mechanicalsuperchargers are available in a varietyof designs, and Figure 12 shows theRoots compressor. A belt from thecrankshaft usually drives the super-
charger at a fixed ratio, so crankshaft andsupercharger rotate at mutually invari-able rates. One difference relative to theturbocharger is that the superchargerresponds immediately to increases inrpm and load factor, with no lag whilewaiting for the impeller to accelerate. Theresult is higher engine torque in dynamicoperation.This advantage is relativized by thepower needed to turn the compressor.This must be subtracted from theengine’s effective net output, and leads tosomewhat higher fuel consumption.However, Motronic can lessen thesignificance of this factor by controllingoperation of a compressor clutch toswitch off the supercharger at low rpmand under light loads.
ME–Motronic
28
Fuel-supply system with return line
1 Fuel tank,2 Electric fuel pump,3 Fuel filter,4 Fuel-pressure regulator,5 Injector.
Fig. 1
UM
K17
02Y
1 2
45
3

Fuel system
Fuel supply and delivery Systems with and without return linesThe fuel system’s function is to ensure aconsistently reliable supply of the fuelmass needed to meet the engine’srequirements under any and all operatingconditions. An electric pump draws thefuel from the tank and forces it through afilter for delivery to the fuel (distribution)rail with its solenoid-triggered injectors.The injectors then spray the fuel into theengine’s intake manifold in preciselymetered quantities. In systems equippedwith a return line the excess fuel then flowsthrough the pressure regulator and backto the fuel tank (Figure 1). Until quiterecently this layout represented the state-of-the-art, but now returnless fuel-supplysystems are becoming increasinglycommon.Both systems rely on an electric fuelpump to provide the fuel circuit with acontinuous supply of fuel from the tank. Apressure regulator, operating at a typicalsupply pressure of 300 kPa, maintainssystem pressure by controlling the flow offuel returning to the tank. The highpressure inhibits formation of unde-sirable vapor bubbles in the fuel.In the returnless system the pressureregulator is mounted immediatelyadjacent to the pump. This means that
the fuel return line from the engine canbe omitted, thus lowering productioncosts as well as fuel temperatures withinthe tank. These lower temperaturesmean lower hydrocarbon emissions, andpromote improved performance from theevaporative-emissions control system.
Electric fuel pumpThe electric fuel pump maintains acontinuous flow of fuel from the tank. Itcan be installed either within the tankitself (in-tank) or mounted externally inthe fuel line (in-line).The in-tank pumps currently in generaluse (Figure 2 shows the EKP 13.5 as arepresentative example) are integratedwithin pump assembly units along withthe fuel-gauge sensor and a swirl baffledesigned to remove vapor from the fuel inthe return line. Hot-delivery problems insystems with in-line pumps can be solvedby installing a supplementary boosterpump within the tank to maintain a low-pressure fuel flow up to the main pumpunit. The pump’s maximum deliverycapacity always exceeds the system’stheoretical maximum requirement toensure that it remains consistentlycapable of maintaining system pressureunder all operating conditions.The fuel pump is switched-on by theengine-management ECU. An interruptcircuit or software-based function stopsfuel delivery whenever the engine isstationary with the ignition switched on.
Fuel system
29
EKP 13.5 electric fuel pump
Fig. 2
UM
K16
79Y

Fuel railThe fuel then flows through the fuel rail,whence it is evenly distributed to allinjectors. The injectors are mounted onthe fuel rail, while rails in systems with areturn line also include a fuel-pressureregulator. A pressure attenuator may alsobe installed. Fuel rails are carefullydimensioned to prevent local fuel-pressure variations caused by reso-nances which occur when the injectorsopen and close. This prevents irreg-ularities in injection mass flow that mightotherwise arise during load and rpmtransitions. Depending upon theparticular vehicle type and its specialrequirements, fuel rails can bemanufactured in steel, aluminum orplastic. The rail may also incorporate atest valve, which can be used to bleedpressure during servicing as well as fortest purposes.
Fuel filterFuel-borne contaminants can impair theoperation of both pressure regulator andinjectors. A filter is therefore installed inthe line downstream from the electric fuelpump. This fuel filter contains a paperelement with a mean pore diameter of 10µm (Figure 3).
Fuel-pressure regulatorInjection quantities are determined byinjection duration and the pressuredifferential between the fuel in the railand the intake-manifold pressure. Return-line systems utilise a pressureregulator to maintain the pressuredifferential between fuel system andintake manifold at a constant level. Thispressure regulator regulates the amountof fuel returning to the tank to maintain aconstant pressure drop across theinjectors (Figure 4). In order to ensurethat the fuel rail is efficiently flushed withfuel, the pressure regulator is generallymounted at its far end. In systems without a return line thepressure regulator is installed within thein-tank pump assembly, whence itmaintains the pressure within the fuel railat a constant level relative to ambient
ME–Motronic
30
Fuel filter
1 Paper element,2 Strainer,3 Support plate.
Fig. 3U
MK
0119
Y
Fuel-pressure regulator
1 Intake-manifold connection, 2 Spring, 3 Valve holder, 4 Diaphragm, 5 Valve, 6 Fuel supply, 7 Fuel return.
Fig. 4U
MK
1297
Y
Fuel-pressure attenuator
1 Spring, 2 Spring plate, 3 Diaphragm,4 Fuel supply, 5 Fuel return.
Fig. 5
UM
K12
98Y
1 2 3
5������
����
������
����
1
2
3
4
67
����
����
1
2
3
45

pressure. As this implies, the systemdoes not maintain a constant pressuredifferential between rail and manifold, soinjection duration must be calculatedaccordingly.
Fuel-pressure attenuator The injectors’ cyclical operating phasesand the periodic fuel-dischargecharacteristic of the positive-dis-placement fuel pump both inducepressure waves in the fuel system. Underunfavorable circumstances the mountson the electric fuel pump, the fuel linesand the rail itself can transmit thesevibrations to the fuel tank and to thevehicle’s body. Noise stemming fromthese sources can be inhibited throughthe use of specially designed mounts andwith fuel-pressure attenuators. The fuel-pressure attenuator (Figure 5) shares itsgeneral design layout with the pressureregulator, with a spring-loaded dia-phragm separating the fuel from the airspace in both cases.
Fuel injectionUncompromising demands for runningrefinement and low emissions make itvital to provide consistently excellent air-fuel mixture quality in every enginecycle. The system must inject fuel inquantities precisely metered to reflectthe induction air’s mass (duration), whilethe start of injection is also a significantfactor (timing). This is why multipointinjection systems feature a solenoid-operated injector for each individualcylinder. At the injection point specifiedby the ECU the injector sprays aprecisely metered quantity of fuel intothe area directly in front of the cylinder’sintake valve(s). Thus condensationalong the walls of the intake tractleading to undesired deviations from theprescribed lambda values is largelyavoided. Because the engine’s intakemanifold conducts only combustion air,its geometry can be optimized solely onthe basis of the engine’s dynamic gas-flow requirements.
Solenoid injector
Design and functionThe essential components of the injectorare– The valve casing with solenoid winding
and electrical connection,– Valve seat with injector-nozzle disc,
and– Reciprocating valve needle with
solenoid armature.
A filter screen in the fuel supply lineguards the valve against contamination,while two O-rings seal the injectoragainst the fuel rail and the intakemanifold. The spring and the force of fuelpressure against the valve seat insulatethe fuel-supply system from the intakemanifold for as long as the coil remainswithout current flow (Figure 6).When the injector’s solenoid winding isenergized, the coil responds by
Fuel system
31
EV6 injector design
1 O-rings,2 Strainer,3 Valve housing with electrical connection,4 Coil winding,5 Spring,6 Valve needle with solenoid armature,7 Valve seat with hole plate.
Fig. 6
UM
K17
12Y
1
2
3
4
5
6
7
1

generating a magnetic field. This lifts thearmature, the valve needle rises from theseat, and fuel flows through the injector.System pressure and the exit aperturedefined by the orifices in the injectornozzle are the primary factors indetermining the injected fuel quantity perunit of time. The valve needle closesagain as soon as the trigger currentceases to flow.
DesignsFour injector configurations are em-ployed to cover virtually all current Mo-tronic systems (Figure 7):– The EV1 injector has been inproduction since the early 70s. Thanks toongoing development, this injectorcontinues to satisfy all of the essentialrequirements encountered in moderngasoline-injection systems.– The EV6 is based on the EV1. Itfeatures superior hot-starting forimproved performance in returnless fuel-supply systems. This is important,considering the fact that the fuel suppliedto the injector is hotter in a returnlesssystem than it is in systems with fuelreturn. There are also a range of differentEV6 installation lengths available.
– So-called “air shrouding” can beadded to further improve mixtureformation with the EV6 (refer to Figure 9).– The EV12 has been developed fromthe EV6. For intake manifolds havingdifficult geometries, the injection pointcan be shifted forward 20 mm to obtainan ideal position.
Spray formationThe injector’s spray pattern asdetermined by discharge geometry andangle, as well as droplet size, influencethe air-fuel mixture formation process.Different spray-patterns are needed toadapt the injector for use with specificgeometrical configurations in cylinderhead and intake manifold. Various sprayconcepts are available to meet theserequirements (Figure 8).
Tapered spray patternAfter being discharged through individualorifices in the nozzle plate, the emergingfuel streams converge to form a taperedspray cloud. A pintle at the bottom end ofthe needle and extending beyond thenozzle can also be employed to obtain atapered form. Engines with a single
ME–Motronic
32
View of different injectors
a EV1 injector,b EV6 injector,c EV12 injector.
Fig. 7
UM
K19
99Y
a b c

intake valve are a typical applicationarea for tapered-spray injectors, whichfocus their discharge toward the openingbetween the intake valve and the wall ofthe intake manifold.
Dual-stream injectorDual-stream patterns are employed inengines with two intake valves. Thenozzle plate’s holes are arranged toconcentrate the emerging fuel in twospray patterns. Each of these cloudsserves one intake valve.
Air shroudingAir-shrouded valves exploit the pressuredifferential between intake manifold andthe ambient atmosphere to enhance thequality of mixture formation. Air isconducted through a shroud in thedischarge region of the nozzle plate. Thisair accelerates to extremely highvelocities as it travels through this narrowpassage before then emerging andpromoting more intense atomization inthe air-fuel mixture (Figure 9).
Fuel system
33
EV6 with external air shroud
1 Air,2 Fuel,3 Air-fuel mixture.
Fig. 9U
MK
1514
Y
Discharge patterns
a Tapered pattern,b Dual-stream pattern.
Fig. 8
������������������������
yyyyyyyyyyyyyyyyyyyyyyyy
����������
���������������
������������
������������
��������
1 2
3
a b
UM
K17
03Y

7 6 5
3
2
1
4
Operating-data acquisition
Driver demand
There is no mechanical linkage toconnect the accelerator pedal with thethrottle valve in engine-managementsystems with ETC throttle control.Instead, the accelerator pedal’s positionis monitored by an accelerator-pedaltravel sensor for transformation into anelectrical signal within the pedal module.The engine-management system inter-prets this signal as “driver demand.”The accelerator-pedal module is anoperational unit unifying all required pedalfunctions and mechanical components.Although this concept renders all in-vehicle adjustment redundant, the factthat a wide variety of individual installationgeometries together with very crampedconditions are frequently encounteredoften makes it necessary to resort tospecific configurations according tovehicle type.The accelerator-pedal travel sensorincorporates a redundancy feature (twopotentiometers) to facilitate diagnosis andensure backup operation. The sensorsoperate with separate reference voltagesfrom mutually independent sources, andtheir signals are also processedseparately within the engine ECU.
Air charge
Engines with design concepts based onmanifold injection display a linearrelationship between air-charge densityand the force generated in thecombustion process, which, in turn,corresponds to the engine’s load factor.This is why air charge is more thansimply a primary parameter for cal-culating injection quantity and ignitiontiming in the ME-Motronic system. In atorque-based system such as ME-Motronic, cylinder charge also serves asthe basis for calculating instantaneousengine torque generation.
Using the following sensors, the ME-Motronic monitors cylinder charge withthe following sensors:– Hot-film air-mass meter (HFM),– Intake-manifold pressure sensor
(DS-S),– Ambient-pressure sensor (DS-U),– Boost-pressure sensor (DS-L, on
turbocharged powerplants), and– Throttle-valve sensor (DKG).
Concepts for monitoring induction chargevary according to engine, and all sensorsare not present in all systems. Values forthose parameters that are not directlymonitored are derived from other,monitored data.
HFM5 hot-film air-mass meterThe hot-film sensor is a “thermal” air-flowmonitor. Basically speaking, this meter(or sensor) is positioned somewherebetween air filter and throttle valve,
ME-Motronic
34
Sensor element in hot-film air-mass meter
1 Electrical connections, 2 Electrical terminals, 3 Evaluation electronics, 4 Air intake, 5 Sensorelement, 6 Air discharge, 7 Casing.
Fig. 1
UM
K17
13-1
Y

T2
T1
T
1
2
∆
T
0
35
4
7
76
T1 = T2
M2
M1
although it can for example be located asan “insert” in the air-filter housing or in asensor tube in the air-intake tract. Figure1 shows the meter’s design. The air-flow meter must register theengine’s mass air intake (kg/h) with theutmost precision. At high load factors, inparticular, there is a tendency for reverseflow pulses from the piston to generatewaves in the air upstream from thethrottle valve. These reverse undulationsshould not be allowed to detract from theair-mass meter’s monitoring accuracy.The HFM5 hot-film air-mass meter is amicromechanical device featuring a hotzone heated to a specific temperature.Temperatures drop on each side of thiszone. If no air flow is present, then thedescending thermal gradients in thesectors on each side of the hot zone willbe identical. Air-flow leads to a moreradical temperature progression curve forthe induction side, in response to the
cooling effect that the incoming air exertson the sensor element. Although the airflowing past the opposite (engine) side ofthe sensor also has a cooling effect, theair warmed by the heater elementultimately raises relative temperatures onthis side. The result is the thermalprogression pattern in the illustration.Temperatures T1 and T2 are found at thetwo monitoring points M1 and M2,respectively, with the actual differentialbeing determined by induction-air mass.This differential ∆T is then converted intoa voltage.This monitoring concept also makes itpossible to register reverse flow, a situationreflected by T2 being lower than T1.
The temperature differential is a directindex of induction-air mass. Therelationship between air mass and thevoltage generated by the processingcircuit defines the sensor’s characteristiccurve (Figure 3), which has sectors forboth forward and reverse flow. Monitoringprecision is further enhanced by using avoltage provided by the Motronic ECU asa reference for the sensor signal. Thecharacteristic curve has also been plottedto aid the Motronic’s integrated diagnosisin recognizing problems such as opencircuits.A separate intake-air temperature sensorcan also be integrated in the system.
Operating-data acquisition
35
Monitoring concept of hot-film air-mass meter
1 Temperature curve, no air flow,2 Temperature curve, with air flow,3 Sensor, 4 Heated zone, 5 Diaphragm,6 HFM5 with measurement tube, 7 Air current.M1, M2 Scan points, T1, T2 Temperatures,∆T Temperature differential generates sensorsignal
Fig. 2
UM
K16
52-1
Y
HFM5 signal voltage over air mass
UM
K16
91E
Fig. 3
Reverse currentForward current
00
200 400 600 kg/h
5
4
3
2
1
V
Sig
nal v
olta
ge
Mass airflow

The sensor tube is available in a variety ofdiameters designed to reflect the engine’sspecific airflow requirements.
Intake-manifold pressure sensorA pneumatic link allows the pressuresensor to monitor absolute pressurelevels (kPa) within the intake manifold.The sensor’s monitoring range extendsfrom 2...115 kPa (20...1,150 mbar).This micromechanical sensor is availableeither for integration within the ECU or asa remote sensor for local mounting on ornear the manifold.This sensor, with its pneumatic link to themanifold, consists of a pressure cell withtwo sensor elements and a space for theprocessing circuitry, both of which aremounted on a single ceramic substrate(Figure 4). The processing circuitamplifies the electrical voltagesgenerated at various levels as areflection of pressure variations. It alsocompensates for thermal effects andconverts the pressure curve to linearform. The signal from the processingcircuit is transmitted to the ECU.
Ambient-pressure sensorThe ambient-pressure sensor shares itsdesign with the manifold-pressuresensor, but is located inside the ECU.Barometric pressure readings areneeded by systems that rely on throttle-valve aperture instead of an air-massmeter to monitor the incoming air supply.The precise data on ambient air densityregistered by this sensor serve as asignificant factor in numerous diagnosisfunctions.
Boost-pressure sensorIn order to regulate boost pressure, thismust first of all be measured. Thisfunction is taken over by a pressuresensor with a measurement rangeextending up to 250 kPa (2,500 mbar).
Throttle-valve sensorME-Motronic uses the throttle valve tocontrol engine output. The throttle-valvesensor is employed to verify that thethrottle valve responds to commands byassuming the specified angle (closed-loop position control).The throttle-valve sensor forms anintegral component within the throttle-valve assembly, with system redundancyprovided by sensors incorporating twoseparate potentiometers operating withindividual reference voltages.
Engine speed, crankshaftand camshaft anglesEngine speed and crankshaft angleThe momentary piston position (travel)within the cylinder serves the system asone parameter for defining the ignitionfiring point. Because each piston in eachcylinder is joined to the crankshaft via aconnecting rod, the crankshaft or engine-speed sensor can provide data indicatingpiston travel in each cylinder. The rate atwhich the crankshaft changes its positionis the engine speed, quantified in thenumber of crankshaft revolutions perminute (rpm). Engine speed, which is yetanother vital operating parameter forMotronic, is also calculated fromcrankshaft position.
Generating the crankshaft-angle signalInstalled on the crankshaft is a ferro-magnetic sensor rotor with a theoretical
ME-Motronic
36
Pressure sensor (for integration in ECU)
1 Pressure connection,2 Pressure cell with
sensor elements,3 Seal rim,4 Evaluation circuit,5 Thick-layer hybrid
(ceramic substrate).
UM
K13
05-1
Y
Fig. 4
2 3 4 51

capacity for 60 teeth, but with a 2-tooth gap, giving an actual sequenceof 58 teeth. This 58-tooth sequence is scanned by an inductive rpm sensorfeaturing a soft-iron core and apermanent magnet (Figure 5). Thesensor’s magnetic field responds to thepassing teeth by generating AC voltage.The amplitude of this voltage risesradically at progressively higher enginespeeds. Adequate amplitudes foroperation are available at minimalengine speeds, extending as low as 20 min–1.Tooth and sensor-pole geometries mustbe precisely matched. The processingcircuit in the ECU converts the sinus-wave voltage with its highly inconsistentamplitudes into a constant-amplitudesquare-wave pattern.
Determining crankshaft angleThe flank data for the square-wavevoltage are transmitted to the computerthrough an interrupt input. A gap in thetooth pattern is registered at those pointswhere the flank interval is twice as largeas in the previous and subsequentsectors. This tooth gap corresponds to aspecific crankshaft angle, with cylinderno. 1 as the reference. The computeruses this point as its crankshaftsynchronization reference. It then counts6 degrees further for each subsequentnegative tooth flank. Because the ignition
must be triggered based on more minuteincrements, the interflank periodicity isdivided by eight. This new unit can thenbe multiplied by one, two, three, etc., andappended to a flank position as the basisfor determining the firing point, allowingtiming adjustments in increments of 0.75degrees.
Calculating segment duration andengine speed from engine-speed sensorsignalThe cylinder offset in the four-strokeengine results in two crankshaftrevolutions (720 degrees) elapsingbetween the start of each new cycle oncylinder no. 1. This period defines themean ignition interval, and theintermediate duration is the segmenttime Ts. Equal distribution of the intervalsresults in:
Ignition, injection and the engine speedderived from the signal duration arerecalculated with each new interval. Thefigure for rotational speed describes themean crankshaft rpm within the segmentperiod and is proportional to itsreciprocal.
Camshaft positionThe camshaft controls the engine’sintake and exhaust valves while rotatingat half the rate of the crankshaft. When a piston travels to top dead center,it is the positions of the intake andexhaust valves, as defined by thecamshaft, that determine the cylinder’sactual cycle phase. TDC can mark theend of the compression phase and thestart of ignition, or, alternatively, the endof the exhaust stroke. Crankshaft dataalone cannot indicate which.Motronic systems with static (distribu-torless) ignition and dedicated coils –such as ME-Motronic – differ from
Operating-data acquisition
37
1 2
4
6
5
3
S
N
Interval Degrees Teeth2 cylinders 360 603 cylinders 240 404 cylinders 180 305 cylinders 144 246 cylinders 120 20
Table 1
Inductive RPM sensor
1 Permanent magnet, 2 Housing, 3 Engine block,4 Soft-iron core, 5 Winding, 6 Toothed rotor withreference point (gap).
Fig. 5
UM
Z01
38Y

systems with rotating spark distributionby requiring supplementary data on cyclephase. The ECU must decide which coiland spark-plug combination are to betriggered, and it derives this informationfrom the camshaft’s position.Data for camshaft position are alsoneeded by systems that adapt injectiontiming for each cylinder individually, suchas those with sequential injection.
Hall-sensor signalCamshaft position is usually monitoredwith a Hall sensor. This consists of a Hallelement with a semiconductor waferthrough which current flows. Thisferromagnetic Hall element responds toactivation by a trigger wheel rotating inunison with the camshaft by generatingvoltage at right angles to the direction ofthe current passing through it.
Determining camshaft positionAs the Hall voltage lies in the millivoltrange, it must be processed in the sensorbefore being transmitted to the ECU inthe form of a switching signal. The basicprocedure is for the microprocessor torespond to trigger-wheel gaps bychecking for Hall voltage and determiningwhether or not cylinder no. 1 is on itspower stroke.Special trigger-wheel designs make itpossible to use the camshaft signal as anemergency back-up in the event ofcrankshaft sensor failure. However, theresolution provided by the camshaftsignal is much too low to allow its use asa permanent replacement for thecrankshaft rpm sensor.
Mixture composition
Excess-air factor λThe lambda excess-air factor (λ )quantifies the relative masses of the airand fuel in the mixture. Optimalperformance is obtained from thecatalyst at λ = 1. Because the lambda, orO2 sensor, monitors the concentration ofoxygen in the exhaust gas, its signals arean index of the excess-air factor lambda(λ ).
Oxygen (lambda) sensorThe oxygen sensor (lambda probe) is a“dual-threshold” unit capable of indicatingboth rich (λ <1) and lean (λ >1) mixtures.The radical transitions that characterizethis sensor’s response curve (Figure 7)facilitate mixture adjustments to achieveλ =1.The wide-band sensor providesinformation on the current excess-airfactor, and can also be used to maintainricher and leaner mixtures.
Two-state oxygen (lambda) sensorbased on the Nernst conceptThe outside of the oxygen sensor’selectrode extends into the exhauststream, while the inside remains incontact with the surrounding air (Figure 6).The essential component of the oxygensensor is a special ceramic bodyfeaturing gas-permeable platinum elec-trodes on its surface. Sensor operationrelies on the porous nature of the ceramicmaterial, which allows oxygen in the air todiffuse (solid electrolyte). This ceramicbecomes conductive when heated.Voltage is generated at the electrodes inresponse to differences in the oxygenlevels on the inside and outside of the sensor. A stoichiometric air-fuel ratioof λ = 1 produces a characteristic jump(step function) in the response curve(Figure 7).
ME-Motronic
38
Position of lambda oxygen sensor in exhaustpipe (schematic)
1 Ceramic coating, 2 Electrodes, 3 Contacts, 4 Housing contacts, 5 Exhaust pipe, 6 Ceramic shield (porous), 7 Exhaust gas, 8 Ambient air, U Voltage.
UM
K16
84Y
Fig. 6
4
3
U
2
1
6
5
87

The oxygen sensor’s voltage andinternal resistance are both sensitive totemperature. Reliable control operationbecomes possible once exhaust-gastemperatures exceed 350°C with un-heated sensors, or 200 °C with heatedunits.
Heated oxygen (lambda) sensorThe heated sensor reduces the waitingperiod between engine start and initiationof effective closed-loop control byproviding reliable performance withcooler exhaust gas (e.g., at idle).Because heated sensors warm morequickly, they also have shorter reactiontimes, reducing lag in closed-loopoperation. This type of sensor also offersgreater latitude in the selection ofinstallation positions.A ceramic heater element warms thesensor’s active ceramic layer from thecenter to ensure that the active materialremains hot enough for operation, evenwhile exhaust-gas temperatures remainmodest.The heated sensor is protected by aguard tube incorporating a restricted flowopening to prevent its ceramic materialfrom being cooled through exposure tolow-temperature exhaust gases.
Wide-band oxygen (Lambda) sensorWhile the dual-threshold sensor signalsrich and lean mixtures, the wide-bandsensor can actually be used to measurethe excess-air factor via the exhaust gas.This facility promotes improved dynamicresponse in the closed-loop controlsystem, regardless of whether themomentary mixture specification is λ = 1. The wide-band sensor expands on theprinciple of the Nernst cell by in-corporating a second electrochemicalcell, the pump cell. It is through a smallslot in this pump cell that the exhaustgas enters the actual monitoringchamber (diffusion gap) in the Nernstcell. Figure 8 shows a schematicdiagram of the sensor’s design. Thisconfiguration contrasts with the layoutused in the dual-threshold cell bymaintaining a consistently stoichiometricair-fuel ratio in the chamber. Applicationof pumping voltage to the pump cellresults in oxygen discharge when theexhaust gas is lean, and oxygeninduction if it is rich. The resultingpumping current is an index of theexcess-air factor in the exhaust gas. Thebasic progression of the curve forpumping current is portrayed in Figure9. Lean exhaust leads to a positivepumping current, which is needed tomaintain a stoichiometric composition inthe atmosphere within the diffusion gap,
Operating-data acquisition
39
Two-state lambda oxygen sensor voltage curve at 600°C operating temperature
a Rich mixture (air deficiency),b Lean mixture (excess air).
UM
K02
79E
Fig. 7
0.9 1 1.1
1,000
800
600
400
200
Excess-air factor λ
Oxy
gen-
sens
or v
olta
ge U
s
mV
1.20.80
a b
Schematic portrayal of continuous wide-bandlambda oxygen sensor and position of sensorin exhaust pipe
1 Nernst cell, 2 Reference cell, 3 Heater, 4 Diffusion gap, 5 Pump cell, 6 Exhaust pipe.
UM
K12
60Y
Fig. 8
15
6
2
3
4
+
–

while rich exhaust is indicated by anegative pumping current.The wide-band sensor thus differssubstantially from its dual-thresholdcounterpart. While the dual-thresholdunit uses the voltage at the Nernst cell asa direct measurement signal, the wide-band sensor employs special processingand control circuitry to adjust thepumping current. The resulting current isthen monitored as an index of theexhaust gas’ excess-air factor. Becausesensor operation is no longer dependenton the step-function response of theNernst cell, air factor can be monitoredas a continuous progression.
Combustion knock
Under certain conditions, combustion inthe spark-ignition engine can degenerateinto an abnormal process characterizedby a typical “knocking” or “pinging” sound.This undesirable combustion pheno-menon marks the outer limits of ignitiontiming advance, and thus, at the sametime, defines the boundaries of power-generation potential and efficiency. Itoccurs when fresh mixture preignites inspontaneous combustion before beingreached by the expanding flame front.During an otherwise normally initiatedcombustion event, the pressure andtemperature peaks created by thepiston’s compressive force generate self-
ignition in the end gas (remainingunburned mixture). This process can beaccompanied by flame velocities inexcess of 2000 m/s, as compared tospeeds of roughly 30 m/s for normalcombustion. This abrupt combustionleads to substantial pressure rises in theend gas, and the resulting pressure wavecontinues to propagate until halted by thecylinder walls. Chronic preignition is characterized bypressure pulses and high thermalstresses acting on the cylinder-headgasket, the piston and around the valves.It can produce mechanical damage in allof these locations.The characteristic oscillations induced bycombustion knock can be monitored byknock sensors for conversion intoelectrical signals, which can then betransmitted to the Motronic ECU (Figures10 and 11).Both the number and installationpositions of the knock sensors must bedefined with the utmost care. Reliableknock detection must be guaranteed forall cylinders and under all operatingconditions, with special emphasis on highengine speeds and load factors. As ageneral rule, 4-cylinder engines areequipped with one, 5 and 6-cylinderengines with two, 8 and 12-cylinderengines with two or more knock sensors.
Engine and intake-air temperaturesThe engine-temperature sensor incor-porates a thermally sensitive resistorwhich extends into the coolant circuit itmonitors. Figure 12 shows the designstructure of this sensor.The electrical resistor is characterized bya Negative Temperature Coefficient(NTC), indicating that its electricalresistance is inversely proportional totemperature. Figure 13 shows the basicresponse curve of resistance overtemperature. The NTC resistor formspart of a voltage divider circuit operatingon a 5-volt power supply. The voltagefrom the NTC resistor varies withtemperature, and an analog-digital
ME-Motronic
40
Pump current Ip in a wide-band lambda oxygen sensor over exhaust-gas air factor
Fig. 9
0
Pos
itive
Neg
ativ
eP
ump
curr
ent
I p
0.7 1.0 1.3 1.6 1.9 2.2Excess-air factor
UM
K12
66E

converter registers these data as anindex of thermal conditions in thecoolant. Compensation for the non-linearrelationship between voltage andtemperature is provided by a table storedin the computer’s database, whichmatches each reading with a corre-sponding temperature. The sensor in theintake tract monitors the temperature ofthe induction air according to the sameconcept.
Engine-temperature sensor
1 Electrical terminals, 2 Housing, 3 NTC resistor, 4 Coolant.
Operating-data acquisition
41
Knock sensor
1 Seismic mass, 2 Casting, 3 Piezoelectric ceramic layer, 4 Contact paths, 5 Electrical terminals.
UM
Z01
99Y
2
3
4
5
1
Knock-sensor signalsThe knock sensor transmits signal c which reflects pressure-wave pattern a in the cylinder.The filtered pressure signal is portrayed in b.
UM
Z01
21-2
E
Fig. 11
a
b
c
a
b
c
without knock with knock
Fig. 12
���������������������
1 2 3
4
Temperature sensor (NTC) response curve
UM
K13
09E
Fig. 13
Temperature °C
Res
ista
nce
Fig. 10
UM
K01
24-3
Y

Operating-dataprocessingTorque-led control concept
PurposeThe engine-management system’sprimary assignment is to convert driverdemand into engine power and torque.The driver needs this engine power toovercome running resistance duringsteady-state operation as well as foraccelerating the vehicle.On today’s spark-ignition engines thisentails calculating the air-charge re-quirement along with the correspondinginjection quantity and optimal ignitiontiming. Once these parameters havebeen defined, the system can proceed toactive control of the actuators thatregulate them (throttle-valve assembly,injectors, ignition coils).In addition to governing cylinder charge,injection and timing, engine-manage-ment systems have also assumed controlof a number of auxiliary functions, manyof which also consume engine power.A distinguishing feature of ME-Motronicis its torque-led control concept.Numerous subcomponents within theoverall Motronic system (idle control, rpmgovernor, etc.) join the systems
controlling the drivetrain (e.g., TCS,transmission-shift control) and generalvehicular functions (such as air-conditioner operation) in relaying re-quests for adaptation of current engineoutput to the basic Motronic system. Tocite one example, the air-conditionercontrol system requests an increase inengine output prior to engaging the a/ccompressor clutch.Earlier practice entailed direct imple-mentation of such commands at thecontrol-parameter level (cylinder charge,fuel mass and ignition timing) on anuncoordinated, individual basis. ME-Motronic goes a step further byprioritizing and coordinating individualdemands before using the availablecontrol parameters to implement theresulting specified torque (Figure 1). Thiscoordinated control strategy makes itpossible to obtain optimal emissions andfuel consumption from the engine atevery operational coordinate.An essential element within the torque-based control concept is the ETCelectronic accelerator pedal which per-mits the throttle-valve control mechanismto advance beyond merely reflectingpedal inputs. Formerly the driver usedthe accelerator pedal to activate amechanical linkage and determinethrottle-valve aperture. The driver
ME-Motronic
42
Torque adjustments in the gasoline engineU
MK
1692
EFig. 1
External demand:– Accelerator pedal (driver),– Cruise control,– Dynamic conditions,– Comfort and convenience
Start
Idle control
RPM governor
Component protection
Start, heat catalytic converter, idle control
Coordination of torque and efficiency demands
Operating efficiency
Injection suppression
Injection duration
Wastegate
control
Throttle valve
Ignition timing
Implementation of output requirement with available control parameters

exercised direct control over the cylindercharge, and the engine-managementsystem’s options for initiating separateadjustments were limited to activation ofa bypass routed around the throttle valve.
Calculating specified torqueThe basic parameter underlying ME-Motronic’s torque-led control concept isthe internal torque produced duringcombustion. This is the physical forceproduced by gas pressure during thecompression and power strokes. Theengine’s actual net torque production isobtained by subtracting such factors asfriction, pumping (gas-transfer) lossesand drive power for ancillary equipment(water pump, alternator, etc.) from thisinternal force.The ultimate goal of the torque-ledcontrol system is to select precisely theengine control parameters needed foraccurate response to driver demandwhile simultaneously compensating forall losses and supplementary re-quirements. Because Motronic “knows”the optimal specifications for chargedensity, injection duration and ignitiontiming for any desired torque, it canconsistently maintain optimal emissionsand fuel economy.
Adjustment of actual torqueME-Motronic’s torque coordinator hastwo potential control paths to choosefrom when regulating internal torquegeneration (Figure 2). One path,furnishing gradual reaction, is controlledby triggering the throttle valve (ETC),while the rapid-response path relies onmanipulation of ignition timing and/ordeactivating the injection at individualcylinders. The slower path, also knownas the charge-control path, is responsiblefor static operation. The chargerequirement calculated for a given torquegeneration determines the cylindercharge, which is then provided by thethrottle valve. The rapid-response(ignition timing) path can react veryquickly to dynamic variations in torquegeneration.
Calculating cylinder charge
The air mass within the cylinder followingclosure of the intake valve is the aircharge. There is also a “relative (air)charge” which is independent of pistondisplacement. It is defined as the ratio ofthe current charge to a charge obtainedunder specified standard conditions (p0 =1,013 hPa, T0 = 273 K).The relative charge must be known inorder to calculate injected fuel quantity.
Operating-data processing
43
Coordinating output with charge path and crankshaft-synchronous paths (ignition timing path)
UM
K16
94E
Fig. 2
Driver
External and internaltorque demand (e.g., rpm governor, a/c com-pressor, trans-mission inter-vention, etc.)
Priority assignmentsCharge path
Crankshaft-synchronous pathpriority assignment
Charge density setpoint
Actual fresh-gas charge
Internal torque setpoint
Efficiency levels, lambda, ignition timing
Torque to charge density conversion
Specified charge density
Charge density– Throttle valve control
Charge– Turbocharger triggering
Specified torque– Synchronous intervention
Throttle valve, specified aperture
Specified manifold pressure
Specified wastegate opening
Injection suppression pattern
Injection duration
Ignition timing advance
Calculate efficiency level and torque references

On today’s spark-ignition engines it isalso the primary parameter for in-fluencing engine output, which is why it isincorporated in the torque structure as acontrol parameter. Because no meansfor directly monitoring charge density isavailable, it must be calculated fromavailable sensor signals with the aid of asimulation model. The requirements forthe charge model are:– Precise determination of charge
density under all operating conditions(dynamic, selective-flow intake mani-fold, variable valve timing, etc.),
– Accurate response to exhaust-gascomponents in systems with variable-rate EGR (controlled external orinternal EGR),
– Calculation of the control commandparameter for “throttle-valve aperture”corresponding to any given charge-density requirement.
Intake-manifold simulation modelThe actual mass of the air within thecylinder is relevant for fuel metering andtorque calculations. In the absence of amethod to directly monitor cylindercharge, it is calculated using an intake-manifold simulation model. Depending onthe system’s induction-charge sensor (air-mass meter or intake-manifold pressuresensor), the raw data for this model iseither monitored directly or simulated.
Induction air massHere, the decisive parameter is the massof the incoming air. While charge densitycan be calculated directly from inductionair mass during static engine operation,abrupt variations in throttle-valveaperture result in a time lag. This stemsfrom the fact that (for example) the firstresponse to an opening throttle valve isfor the intake manifold to fill with air. Adisparity exists between the air massactually entering the combustionchamber and the air monitored by asensor such as the hot-wire air-massmeter (HFM) for the duration of this lagperiod. It is only after pressure levels inthe manifold start to rise that more air canflow into the combustion chamber.
Intake-manifold pressureThese considerations elevate manifoldpressure to the status of a primaryfactor; the relationship between therelative cylinder charge – the relevantfactor – and the intake-manifold pres-sure can be portrayed using a linearequation (Figure 3).The linear equation’s offset is defined bythe partial pressure emanating frominternal residual gases, making it afunction of valve overlap, rpm andambient barometric pressure, while thegradient is determined by engine speed,valve overlap and combustion-chambertemperature.
Other flow into the manifoldA supplementary mass flow, over andabove the air entering through the throttlevalve, results from activation of suchsystems as the evaporative-emissionscontrol. The regeneration flow requiredby this system can be varied with the aidof a tank vent valve (purge valve). Withmanifold pressure as a known quantity, itis possible to calculate the regenerationflow for use in the intake-manifold modelsimulation process.
Monitoring charge density with the HFMWhen an HFM is fitted this directlymeasures the air mass entering theintake manifold. This process entails
ME-Motronic
44
Relationship between manifold pressure andrelative charge density
Note: Each parameter set (“pirg”, “fupsrl”) is validfor a single rpm, one valve overlap and onemanifold geometry.
UM
M05
47E
Fig. 3
Gradient: “fupsrl” (%/hPa)
%
Intake manifold pressure
hPaOffset:
“pirg” (hPa)Partial pressure
Internal residual gas
Rel
ativ
e ch
arge
den
sity

multiplying the mean mass airflowmonitored during an intake stroke(segment) by the intake stroke’s durationfor conversion into a relative chargedensity. The other parameters requiredfor intake-manifold model simulation(such as intake-air temperature) areeither monitored directly or calculated inthe modeling process (in this caseintake-manifold pressure, but alsosecondary parameters such as com-bustion-chamber temperature).
Monitoring charge density with amanifold-pressure sensorIf an intake-manifold pressure sensor ispresent to act as a “primary charge-densitysensor” then manifold pressure can bemonitored directly. The system calculatesthe mass of the air entering the intakemanifold based on manifold pressure.
Cylinder charge control
The density of the charge entering thecylinder is also controlled with the intake-manifold model, exploiting the fact thatgas flow through valves (in this case thethrottle valve) can be formulated as anequation. The main factors are the entrypressure immediately in front of thethrottle valve, the pressure drop, thetemperature and the effective aperture;all parameters calculated with the intake-manifold model. Other parametersrelevant for specific throttle valves (suchas friction losses in the air current) mustbe quantified using test-stand measure-ments.Now the intake-manifold model can be“turned around” to calculate a throttle-valve aperture from the desired cylindercharge density (which has beencalculated by ME-Motronic’s torque-ledcontrol facility). This aperture istransmitted to the throttle-valve actuator’sposition controller as a command value.
Calculating injection timing
Calculating injection durationCylinder-charge density can be used asthe basis for calculating the fuel mass
required to obtain a stoichiometric air-fuel ratio. The injector constant, whichvaries according to injector design, canthen be incorporated into the calculationsto produce the injection duration.Injection duration is also affected by thedifferential between the fuel’s supplypressure and injection counterpressure.The standard fuel supply pressure is 300kPa (3 bar). This pressure can bemaintained using any of a variety ofreference sources. Fuel-supply systemswith return lines maintain constantsupply pressures relative to manifoldpressure. This strategy ensures that thepressure differential across the injectorsremains constant in the face of changingmanifold pressures, so that roughlyconsistent flow rates result. Returnlessfuel systems rely on a different concept,maintaining their 300 kPa supplypressure relative to ambient pressure.Fluctuations in the pressure within theintake manifold produce variations in thedifferential between its own pressure andthat of the fuel supply. A compensationfunction corrects this potential errorsource.As the injectors open and close theyinduce pressure waves in the fuel-supplysystem. This leads to flow-rateinconsistencies when the injector isopened. An adaptation factor correlatedwith engine speed and injection durationis used to compensate.The opening duration calculated up tothis point will be valid if we assume thatthe injector has already opened and isdischarging fuel at a constant flow rate,but the injector’s opening time must alsobe considered in real-world operation.This opening duration displays significantvariations depending on the voltagebeing supplied by the battery. There maybe substantial lag before the valve openscompletely, especially in the startingphase or when the battery is partiallydischarged. A supplementary injectionduration based on battery voltage isadded to the base duration tocompensate for this effect.Excessively short injection durationswould lend disproportionate influence to
Operating-data processing
45

the valve opening and closing times. Thisis why a minimum injection duration isdefined to guarantee precise fuelmetering. This minimal duration is lessthan the injection period required forminimum potential cylinder charging.
Injection timingOptimal combustion depends on correctinjection timing as well as precisemetering. The fuel is usually injected intothe intake manifold while the intake valveis still closed. Termination of the injectionperiod is defined by something known asthe injection advance, which is indicatedin crankshaft degrees, and uses intake-valve closure as a reference. Theinjection duration can then be correlatedwith engine speed to obtain a point forinitiating injection defined as an angle.Current operating conditions are alsoreflected in the calculations to define theinjection advance angle.ME-Motronic triggers an individualinjector for each cylinder, making itpossible to preposition a separate fuelcharge for each cylinder (sequentialinjection). This option is not available withsystems that rely on only one injectionvalve (single-point injection) or simul-taneous activation of several injectors atonce (group injection).
Calculating the ignition angleThe “reference ignition angle” iscalculated based on the engine’s currentsteady-state operating status. Its essen-tial determinants are instantaneouscylinder charge, engine speed, andmixture composition (as indicated by theexcess-air factor λ). The ignition angle iscorrected to compensate for the particularoperating conditions encountered duringstarting and in the warm-up phase. Asimplified representation of the “referenceignition angle” in ME-Motronic woulddefine it as the earliest potential ignitionangle under any given operatingconditions. Under standard operatingconditions, with the engine warmed to itsnormal running temperature, this angle is
defined by a minimum interval separatingit from the knock threshold.This reference ignition angle can then befurther retarded by the knock control (toavoid combustion knock) and the crank-shaft-synchronized torque-guidance out-put (to reduce torque).The reference ignition angle is combinedwith the correction factors listed above toproduce the so-called “basic ignitionangle”.The actual ignition angle specified by thesystem reflects the addition of asupplementary correction factor de-signed to compensate for phase error inthe engine-speed sensor.
Calculating the dwell angle
The purpose of the ignition system is tosupply enough energy to ensurecomplete combustion of the air-fuelmixture at precisely the right instant.Energy availability is essentially definedby the dwell period for charging theprimary circuit; the end of this periodusually coincides with the firing point.The ECU specifies a dwell anglecorresponding to the ignition coil’scharge requirement. It activates the coil’sprimary current at the start of the dwellperiod and then interrupts it to initiateignition at the firing point. This is how ME-Motronic controls distributorless ig-nition systems (DLI).The system refers to a program map todetermine the dwell angles for specificengine speeds and battery voltages,while its final output also includes atemperature correction.The start of the dwell period is definedby the difference between the end ofdwell and the dwell angle. The dwellangle is calculated from the dwell periodusing a time/angle conversion equation.The end of the dwell period is defined tocoincide with the firing point (ignitiontiming).The system basically has two options fordefining the start and the end of the dwellperiod:– As an angle,– As a period of time.
ME-Motronic
46

When defined as an angle, the segmenttime is used to convert the dwell periodinto an angle. During dynamic variationsin engine speed this produces a timingerror, as the segment times used forcalculating angle position are alreadyoutdated. Positive dynamic engine-speed changes (acceleration) lead toattenuated dwell periods, while negativedynamics (deceleration) produceextended dwell angles. Compensationfor the dwell period reductions thataccompany acceleration is provided byan injection advance, which must alwaysbe added to the basic duration. Thisdynamic injection advance declines asengine speed increases. In contrast,pronounced dynamic changes at low rpmcan retard the dwell timing to such anextent that the dwell period becomes toobrief for recharging the coil. Theresponse is to transmit the dwell periodtermination point as a time function at lowrpm. This ensures generation ofadequate ignition energy regardless ofdynamic fluctuations.
Operating conditions
The various engine operating conditionsare primarily distinguished by variationsin torque generation and engine speed.Figure 1 shows the different ranges.Conditions characterized by high rates ofdynamic change in rpm and load facor areespecially significant, as they placespecial demands on the mixture-formation system (i.e., condensation andvaporization of the fuel film on themanifold walls). Other important elementsare starting phase, and the subsequenttransition phase that continues untilengine and exhaust system warm to theirnormal operating temperatures.
Starting
Special calculations are employed toregulate charge control, injection andignition timing for the duration of thestarting process. At the outset of this
process the air within the intake manifoldis stationary, and the manifold’s internalpressure reflects that of the surroundingatmosphere. This rules out using themanifold simulation model for throttle-valve control. Instead, throttle-valveposition is specified as a fixed parameterbased on starting temperature.In an analogous process special“injection timing” is specified for the initialinjection pulses.The injected fuel quantity is augmentedin accordance with engine temperatureto promote formation of a fuel film on thewalls of the intake manifold and thecylinders, thereby compensating for theengine’s higher fuel requirement as itruns up to speed.The system immediately starts to fadeout the start-enrichment as soon as theengine turns over, until it is completelycancelled upon termination of thestarting phase (600...700 min–1). The ignition angle is also adapted to thestarting process. It is adjusted as afunction of engine temperature, intake-airtemperature, and engine speed.
Cylinder recognitionBefore the first ignition spark can begenerated, the system must reliablyidentify which cylinder is currently on itscompression stroke. Ignition during theintake stroke could initiate backfiringthrough the manifold, leading tocomponent damage.
Operating-data processing
47
Engine operating ranges
UM
K16
85E
Fig. 1
WOT
Part throttle Acceleration enrichment
Resumption
Overrun (trailing throttle)fuel cutoff
Start
Tor
que
Idle
RPM

The system determines cylinder phasesby correlating the respective signals fromcrankshaft and camshaft sensors. Thecamshaft sensor rotor features at leastone segment. The signal progression forone camshaft rotation is shown in Figure2, which also shows the signal patterngenerated by the crankshaft sensor as itscans through all 58 rotor teeth on each
rotation. When the gap in the signal fromthis sensor (Figure 2, Curve b) coincideswith the depression in curve c, thisindicates that cylinder no. 1 is on itscompression stroke, meaning that it isnext in line to fire (Ignition A in Figure 2).The first ignition spark in the start phasecannot be triggered until the level of thecamshaft signal at the first gap in thecrankshaft-sensor signal has beenevaluated; this is how the systemdetermines which cylinder is next in thefiring order (Figure 2: Cyl. 1 or 6).
Rapid startThe “rapid-start” mode reduces the time that elapses between starterengagement and cylinder recognition.This shortens overall starting times forenhanced convenience while alsoreducing the loads placed on starter andbattery.The rapid start relies on equipment suchas a special “rapid-start” sensor rotormounted on the camshaft (Figure 3). Thissensor rotor generates a unique flankprofile (Figure 4), enabling the system torecognize cylinder phases – and thustransmit the first ignition spark – beforethe first gap in the crankshaft signal isreached.
ME-Motronic
48
Rapid-start sensor rotor
UM
M05
48Y
Fig. 3
Signal patterns for ignition, crankshaft and camshaft on a 6-cylinder engine with standard sensorrotor
a Ignition-coil secondary voltage, b Crankshaft rpm-sensor signal, c Hall-sensor signal (standard sensor rotor) at camshaft.1 Close, 2 Ignition.A Ignition at Cylinder No. 1, B Ignition at Cylinder No. 5, C Ignition at Cylinder No. 3,D Ignition at Cylinder No. 6, E Ignition at Cylinder No. 4.
UM
K13
08Y
Fig. 2
a
b
c
1
2
E A B C D

Post-start phase
The post-start phase (immediatelyfollowing termination of the startingphase) is marked by further reductions inthe charge densities and injected-fuelquantities employed for starting. Systemresponse in this phase is defined by therise in engine temperature and the periodthat has elapsed since the starting phaseended.Ignition angles are also adjusted tocorrespond to the revised injected-fuelquantities and different operating status.The post-start phase trails off in a smoothtransition to the warm-up phase.
Warm-up and catalytic-converter heatingAfter starting at low engine temperatures,cylinder charge, injection and ignition areall adjusted to compensate for theengine’s greater torque requirements;this process continues up to a suitabletemperature threshold.The prime concern in this phase is rapidwarming of the catalytic converter, asquick transition to catalytic-converteroperation permits drastic reductions inexhaust emissions. The strategy em-
ploys a portion of the exhaust gas for“cat-converter heating” during this phase,while accepting the resulting sacrifices inengine efficiency.There are basically two concepts:– Secondary air injection into a rich
mixture with retarded ignition timing,and
– Lean warm-up with extremely retarded(late) ignition timing.
Both concepts entail using retardedignition timing to operate the engine at alow level of efficiency. The initial resultsare higher exhaust-gas temperaturesand reduced torque generation. Thetorque-based control automaticallycompensates for this loss by prescribinghigher cylinder-charge densities. Thisproduces a larger quantity of hot exhaustgas for use in heating the catalyticconverter with minimal delay. Thecatalytic converter’s rapid warm-up andthe consequent early onset of operationfurnish a substantial reduction in exhaustemissions.
Lean warm-upThe combination of lean warm-up withthe extremely retarded ignition pointleads to the post-oxidization of the
Operationconditions
49
RPM and phase-sensor signal (camshaft signal) from rapid-start sensor rotor on 4-cylinder engine
a Filtered rpm-sensor signal,1...4 Initiation of the calculations for Cylinders 1 through 4.2...30 Pulses in one half of a crankshaft rotation.b Rapid-start sensor-rotor signal with four equidistant negative phase flanks.A Equidistant to next negative phase flank.The pulse sequence indicates the engine’s current rotation cycle.
Fig. 4
12 6 10 14 18 22 26 30 2 6 10 14 18 22 26 30 2 6 10 14 18 22 26 3026
3 42 6 10 14 18 22 26 30
2 1a
b
30
AA A A
UM
M05
49Y

unburnt hydrocarbons which result frominefficient combustion. The term “lean warm-up” stems from theuse of a slightly lean base mixture tosupply the oxygen required to supportthis oxidation process.Although this concept’s advantage is thefreedom to dispense with supplementarycomponents, limits on its potential forheat generation mean that the catalyticconverter must be installed close to theengine to minimize thermal losses.
Secondary-air injectionThis concept expands on the low-efficiency strategy by operating theengine on high levels of excess fuel (λ <0.6) to increase the carbon monoxide(CO) and hydrocarbon (HC) content ofthe exhaust gas. Fresh (“secondary” airwhich is not involved in the internalcombustion process) is then injecteddirectly downstream of the exhaustvalves to support oxidation of CO andHC. This produces heat energy, whichthen flows to the catalytic converter,enabling it to reach operating tem-perature with minimal delay.An electric vacuum pump draws therequired secondary air from within theair-filter housing or through a specialcoarse filter. Injection into the exhaustsystem is then regulated by adeactivation valve and a check valve
designed to prevent hot exhaust gasesfrom flowing back into the secondary-airinjection system. ME-Motronic triggersthe secondary-air pump and air valve atthe indicated intervals. A wide-bandLambda oxygen sensor facilitatesprecise diagnosis of the secondary-airpump.This process produces enough heat foruse with catalytic converters situatedfurther away from the engine. Figure 5shows the respective curves forhydrocarbon and carbon-monoxideemissions in the initial seconds of theemissions test with and withoutsecondary-air injection.
Idle
The engine generates no torque at idle;the power generated in the combustionprocess being needed to sustain engineoperation and to drive the ancillarydevices. Under these conditions, thetorque that the engine needs to remainin operation combines with the idlespeed to define fuel consumption.Because a substantial portion of the fuelconsumed by vehicles in heavy stop-and-go traffic is actually burned in thiskind of use, it pays to hold friction lossesduring idling at the lowest possible level.This translates into specifying low idlespeeds.
ME-Motronic
50
Effects of secondary-air injection on CO and HC emissions (6-cylinder engine, 2.8 litre, 145 kW).
1 Without secondary-air injection, 2 With secondary-air injection.v Vehicle velocity.
UM
K17
11E
Fig. 5
1,000
2,000
3,000
0km/h km/h
40 80
1 1
2 2
120 s0 40TimeTime
80 120 s0
CO
em
issi
ons
υ υ
100
200
300
ppm ppm
0
50 50
0 0
HC
em
issi
ons

ME-Motronic’s closed-loop idle controlreliably maintains a stable idle at thedefined level regardless of variations inoperating conditions. These variationscan stem from from factors such asfluctuating current draw in the electricalsystem, air-conditioner compressors,gear engagement on automatic-trans-mission vehicles, active power steering,etc.
WOT (full load)
At Wide-Open Throttle (WOT) there areno throttling losses, and the engineproduces the maximum potential poweravailable at any given rpm.
Transition response
Acceleration/decelerationA portion of the fuel discharged into theintake manifold does not reach thecylinder in time for the subsequentcombustion process. Instead, it forms acondensation layer along the walls of theintake manifold. The actual quantity offuel stored in this film rises radically inresponse to higher load factors andextended injection durations.A portion of the fuel injected when thethrottle valve opens is absorbed for thisfilm. As a result, a corresponding quantityof supplementary fuel must be injected tocompensate and prevent the mixture
from going lean under acceleration.Because the additional fuel retained inthe wall film is released again once theload factor drops, injection durationsmust also be reduced by a correspondingincrement during deceleration.Figure 6 shows the corresponding curvesfor injection duration.
Overrun fuel cutoff/renewed fuel flowOverrun, or trailing throttle, indicates acondition in which the power beingprovided by the engine at the flywheel isnegative. Under these conditions theengine’s friction and gas-flow losses canbe exploited to slow the vehicle. Theengine can continue to run with orwithout active fuel injection.For passive, injectionless trailing-throttleoperation the injection is deactivated toreduce fuel consumption and exhaustemissions. ME-Motronic’s torque-basedcontrol can regulate suppression of thefuel-injection pulses to prevent radicaltorque jumps during the transition totrailing throttle by relying on gradualinstead of abrupt reductions in specifiedoutput.Injection resumes once rpm falls to aspecified reactivation speed located at apoint above idle. Actually, the ECU isprogrammed with a range of reactivationspeeds. These vary to reflect changes inparameters such as engine temperatureand dynamic variations in engine speed,and are calculated to prevent the rpmfrom falling below the defined minimumthreshold.Once injection resumes, the systemstarts by using the initial injection pulsesto discharge supplementary fuel andrebuild the wall fuel layer. When fuelinjection is resumed, the slow, controlledincrease of engine torque by the torque-based control ensures that torquebuildup is smooth (gentle transition).
Operationconditions
51
Transitional injection duration
1 Injection signal from charge-density calculations,2 Corrected injection duration, 3 Supplementaryinjected fuel quantity, 4 Reduction of injected fuelquantity, 5 Throttle valve angle αTV.
UM
K13
15-1
E
Fig. 6
4
Inje
ctio
n du
ratio
n/th
rottl
e-va
lve
angl
e
Time
1
2 3
5

Closed-loop idle-speed control
Purpose
The engine does not furnish torque at theflywheel during idling. To ensure con-sistent idling at the lowest possible level,the closed-loop idle-speed control systemmust maintain a balance between torquegeneration and the engine’s “powerconsumption.”Power generation is needed at idle in orderto satisfy load requirements from a numberof quarters. These include internal frictionat the engine’s crankshaft and valve-trainassemblies, as well as such ancillaryequipment as the water pump. The engine’s internal friction losses aresubject to substantial variation inresponse to temperature fluctuations,while friction also changes, albeit at amuch slower rate, over the course of theengine’s service life.The load imposed by external factors (suchas the a/c compressor) also fluctuatesthrough a wide range as ancillaries areswitched on and off. Modern engines areespecially sensitive to these variations,owing to their lower reciprocating andflywheel masses as well as higher intake-manifold (storage) volumes.
Operating concept
ME-Motronic’s torque-based conceptrelies on closed-loop idle-speed controlto quantify the output needed to maintainthe desired idle speed under anyoperating conditions. This output rises asengine speed decreases, and drops as itincreases.The system responds to recognition ofnew “interference factors” such as ac-tivation of the a/c compressor or en-gagement of a drive range in an automatictransmission by requesting more torque.Torque demand must also be increased atlow engine temperatures to compensatefor higher internal friction losses and/ormaintain a higher idle speed.
The sum of all these output demands isrelayed to the torque coordinator, whichthen proceeds to calculate thecorresponding charge density, mixturecomposition and ignition timing.
Lambda closed-loop controlPost-treatment of exhaust gases in a 3-way catalytic converter represents an effective means of reducing con-centrations of harmful exhaust pollut-ants. The converter can reduce hydro-carbons (HC), carbon monoxide (CO) andoxides of nitrogen (NOX) by 98% and more (Figure 1), converting them to water(H2O), carbon dioxide (CO2) and nitrogen(N2). This level of efficiency is contingenton engine operation within a very narrowscatter range surrounding the stoichio-metric air-fuel ratio of λ = 1.
ME-Motronic
52
Catalytic efficiency and lambda-sensor voltagerelative to excess-air factor λ1 Without catalytic post-combustion treatment,2 With catalytic post-combustion treatment,3 Voltage curve with 2-threshold λ sensor.
UM
K08
76-2
E
Fig. 1
λ-control range (catalyst window)
Excess-air factor λrich
Sen
sor
volta
ge U
λE
ngin
eem
issi
ons
Eng
ine
emis
sion
s
lean0.975 1.0
NOX
NOX
CO
CO
1
2
3
HC
HC
1.025 1.05

Two-state lambda closed-loop control
Control rangeThe “lambda window,” corresponding tothe range available for effectivesimultaneous processing of all three“classical” exhaust-gas components, isextremely restricted. Closed-loop lambdacontrol is needed to maintain operationwithin this window (λ = 0.99...1).The two-state oxygen sensor monitorsthe exhaust stream’s oxygen contentfrom a position on the engine side of thecatalytic converter. Lean mixtures (λ > 1)induce sensor voltages of approx. 100mV, while rich mixtures (λ < 1) generateroughly 800 mV. At λ = 1 the sensorvoltage suddenly jumps from one level tothe other.ME-Motronic includes this signal from theoxygen sensor in its calculations ofinjection duration. Figure 2 is a
schematic portrayal of the circuit’sconfiguration.
OperationA closed-loop lambda control system canonly function in tandem with a fullyoperational oxygen sensor. An auxiliaryprocessing circuit monitors the sensor ona continuing basis.A cold oxygen sensor or damagedcircuitry (short or open circuits) will leadto implausible voltage signals, which theECU will reject. Depending uponindividual configuration and installationposition, the heated oxygen sensorsfound today in most systems can assumeoperation after only 15 to 30 seconds.Cold engines require a richer mixture (λ< 1) to run smoothly. This is why theclosed-loop lambda control circuit is onlyreleased for active intervention once adefined temperature threshold has beenreached.Once the lambda control assumesoperation, the ECU uses a comparator toconvert the sensor signal into binaryform.The lambda closed-loop control reacts toincoming signals (λ > 1 = mixture toolean, or λ < 1 = mixture too rich) bymodifying the control variables, gener-ating a control factor for use as amultiplication factor when modifying theinjection duration.Injection duration is adjusted (lengthenedor reduced) and the control factor reactsby settling into a state of constantoscillation (Figure 3).Continuing oscillation in a range with λ =1 as its focal point is the only way toachieve optimal lambda control with adual-state system. The precision of theclosed-loop control process dependsupon the speed with which the controlsystem can adjust the control factor tocounteract shifts in the excess-air factor.While waiting fuel is constantly beingdischarged into the combustion chamber,the O2 sensor is located elsewhere,further back in the exhaust system. Theresulting gas-transit times translate intoresponse lag within the control circuit,with the actual delay depending on the
Lambda closed-loopcontrol
53
Lambda closed-loop control: Operationalschematic
1 Air-mass meter,2 Engine,3a Lambda oxygen sensor 1,3b Lambda oxygen sensor 2 (with two-statecontrol only),4 Catalytic converter,5 Injectors,6 ECU.Us Sensor voltage,Uv Injector control voltage.
UM
K13
19-1
E
Fig. 2
AirExhaustgas
Fuel
VE
3a 3b
UV USa
1 2 4
5
6
USb

engine’s load factor and speed. Theultimate reaction to mixture adjustmentscan only be measured once the lagperiod has elapsed. This leads to aminimum phase duration (periodicity) forthe cyclical revisions in the control factor.Processing times and the sensor’sresponse delay increase lag even further.The duration of the oscillation periods isdetermined by the transit times of thegas, while the ramp climb maintainslargely constant amplitudes throughoutthe engine’s load and speed range,despite variations in gas-transit times.Radical steps in control factor duringmixture adjustments (sensor jump)accelerate the reaction process, makingit possible to shorten the oscillationperiod.
Lambda shiftBecause the sensor’s response patternvaries depending upon the direction ofthe monitored mixture transition (viz., rich
to lean, or lean to rich), a symmetricalcontrol arrangement would produce theslightly lean exhaust mixture portrayed inFigure 3b. Because catalytic converterefficiency is optimal in the λ = 0.99...1.0range, the control system must be able tocounteract this tendency. An asym-metrical controller oscillation pattern canshift the mixture into the optimalconversion range.The required asymmetry is obtainedeither by delaying the switch-over of thecontrol factor after the voltage jump (fromlean to rich) at the oxygen sensor, or withan asymmetrical step function. Maximaare limited to maintain the controller’sdynamic response.
Adapting the Lambda pilot control tothe Lambda closed-loop control The lambda closed-loop control systemcorrects each consecutive injection eventin the sequence based on previousmonitoring data from the O2 sensor.As a result, a certain time shift arisingfrom gas-transit times is unavoidable,and the approach to new operating pointsdefined with maladjusted pilot control ischaracterized by deviations from λ = 1.This condition continues until thesystem’s cyclical control can reestablishequilibrium.Thus a special default (or reference)control mechanism is needed to maintaincompliance with emissions limits. Thepilot control is programmed when thesystem is adapted to the engine, and acorresponding lambda control map isstored in a ROM (program memory).However, subsequent revisions in thedefault control may be needed tocompensate for the effects of drift factorsduring the vehicle’s service life, includingvariations in the density and quality of thefuel. If the lambda controller starts toconsistently implement a single set ofcorrections during operation in aparticular engine speed and load range,the pilot control’s adaptation function willregister this fact and respond byprogramming corresponding correctionsinto the system’s non-volatile memory
ME-Motronic
54
Dynamic two-state lambda control with typicaloscillation patterns
a Signal from two-state sensor (simplified),b Oscillation pattern of control factor,c Switching lag with limited maximum.
UM
K17
07E
Fig. 3
100
800
1
1
Time
Sen
sor
volta
geC
ontr
ol fa
ctor
fr
Con
trol
fact
or fr
mVa
b
c
Bounce KFRP
Constant decrease with KFRI
Delayed bounce with limited maximum

(RAM or EEPROM with constant currentsupply). The corrected pilot control isthen ready for immediate implementationat the next start, assuming duty until thelambda closed-loop control becomesactive. Interruptions in the power supply to thenon-volatile memory are also registered;adaptation then recommences usingneutral pilot-control values as a startingpoint.
Dual-sensor lambda closed-loop controlInstalling the oxygen sensor at the backend of the catalytic converter (“cat-back”position) helps guard it against con-taminants in the exhaust gas while also reducing the thermal stressesimposed on it. This type of auxiliarysensor can generate a second,overlapping control signal to augment theone from the main, (“cat-forward”) sensoron the engine side and ensure stable air-fuel mixture composition over an ex-tended period. The superimposed control systemmodifies the asymmetry of the constantoscillation pattern that characterizescontrol mechanisms based solely on acat-forward oxygen sensor; thuscompensating for the lambda shift.A lambda control strategy basedexclusively on a sensor mounted behindthe converter (“cat-back”) would behandicapped by excessive control lagproduced by extended gas-transit times. While helping maintain the lambdacontrol system’s long-term operationalstability, the second, “cat-back” sensoralso can be employed as a tool forassessing the catalytic converter’seffectiveness.
Continuous lambda closed-loop controlWhile the two-state sensor can onlyindicate two states – rich and lean – witha corresponding voltage jump, the wide-band sensor monitors deviations from λ = 1 by transmitting a continuous signal.In other words, this wide-band sensor
makes it possible to implement lambdacontrol strategies based on continuousinstead of dual-state information.The advantages are:– A substantial improvement in dynamic
response, with quantified data ondeviations from the specified gascomposition, and
– The option of adjusting to any values,i.e., also air factors other than λ = 1.
The second option is especiallysignificant for strategies seeking toexploit the fuel-savings potential of leanoperation (lean-burn concepts).
Evaporative-emissions controlsystem
Source of fuel vaporsThe fuel in the tank is warmed by: – Heat radiated from external sources,
and– Excess fuel from the system return
line, which is heated during itspassage through the enginecompartment.
This results in HC emissions whichprimarily emerge from the fuel tank in theform of vapor.
Limiting HC emissionsEvaporative emissions are limited by legalmandate. Limitation is by means ofevaporative-emissions control systemsequipped with an activated-charcoal filter(carbon canister) installed at the end of thetank’s vent line. The activated charcoal inthe canister binds the fuel vapors, allowingonly air to escape into the atmosphere,while simultaneously providing the pres-sure-relief function. To support ongoingregeneration in the charcoal filter, an ad-ditional line leads from the canister to theintake manifold.Vacuum, produced in the intake manifoldwhenever the engine is running, draws in acurrent of atmospheric air; this air flowsthrough the charcoal on its way to themanifold. The air stream absorbs the fuelvapors stored in the activated charcoal and
Evaporative-emissionscontrol system
55

takes them to the engine for combustion. Apurge-valve installed in the line to themanifold meters this regenerative or“cleansing” flow (Figure 1).
Regeneration flowThe regenerative stream is an air-fuelmixture of necessarily unknowncomposition, as it can contain fresh air aswell as substantial concentrations ofgasoline extracted from the activatedcharcoal.The regenerative flow thus represents amajor interference factor for the lambdaclosed-loop control system. A re-generative flow representing 1% of theintake stream and consisting solely offresh air will lean out the overall intakemixture by 1 %. A flow with a substantialgasoline component on the other handcan enrichen the mixture by something inthe order of 30%, owing to the effects onthe A/F ratio λ of fuel vapor with astoichiometric factor of 14.7. In addition,the specific density of fuel vapor is twicethat of air.
Canister-purge valveThe canister-purge valve ensuresadequate ventilation of the carboncanister while holding lambda deviationsto a minimum (Figure 2).
ECU control functionsThe canister-purge valve closes atregular intervals in order to allow themixture adaptation process to proceedwithout interference from the tank’sventilation flow.During active regeneration the systemselects the optimal purge quantity for
ME-Motronic
56
Evaporative-emissions control system
1 Line from fuel tank to activated-charcoal canister, 2 Activated-charcoal canister, 3 Fresh air, 4 Canister-purge valve, 5 Line to intake manifold, 6 Throttle assembly with throttle valve.∆p Difference between manifold pressure ps and ambient barometric pressure pu.
Fig. 1
5
6
4
3
1
2
p
p
∆
u
Canister-purge valve
1 Hose fitting, 2 Seal flange, 3 Armature, 4 Spring, 5 Solenoid winding, 6 Solenoid core with flow channel, 7 Flow path.
UM
K17
06Y
UM
K17
01Y
Fig. 2
1
2
3
4
5
6
7
1

instantaneous operating conditions, withthe ECU generating signals to open thevalve in a ramp pattern. The purgestream absorbs a specified gaseous “fuelload,” defined using data from theprevious regeneration cycle. At the sametime, the system reduces injectiondurations to compensate for theanticipated fuel content in the purgestream. Because the mixture-adaptationfunction is a separate process, thesystem now interprets any deviationsfrom lambda as changes in “fuel load”and responds with corrective adjustmentto the initial specification.For the “load-sensitive” control of thispurge flow, ME-Motronic usesparameters familiar from the intake-manifold model, which define suchfactors as the manifold’s internalpressure and temperature. Thisfacilitates precise calculation of the purgeflow. The system is designed to operatewith up to 40% of the total fuel comingfrom the regeneration current.With the lambda control system inactive,only a minimal regenerative current isallowed into the induction system, as until the lambda comes online there is no control mechanism capable ofcompensating for the mixture deviationsthat regeneration produces. In order toprevent unburned fuel vapors fromentering the catalytic converter, thepurge valve closes immediately inresponse to the interruption of fuel supplywhich occurs when the throttle isreleased (overrun fuel cutoff).
Knock control
Electronic control of ignition timing allowsextremely precise adjustment of advanceangles based on engine rpm, tem-perature and load factor. Despite this precision, conventionalsystems must still operate with asubstantial safety margin to avoidapproaching the knock threshold. Thismargin is necessary to ensure that nocylinder will reach or go beyond the
preignition limit, even when susceptibilityis increased by risk factors such asengine tolerances, aging, environmentalconditions and fuel quality. The enginedesign which results when these factorsare taken into consideration features alower compression ratio with retardedignition which lead to sacrifices in fuelconsumption and torque.These disadvantages can be avoided by using a knock-control system.Experience confirms that such a systemallows higher compression ratios, withconsiderable improvements in both fueleconomy and torque. With this system, itis no longer necessary to specify pilotignition-timing angles defined to reflectworst-case scenaria. Instead, idealconditions (engine compression attolerance threshold, maximum fuelquality, cylinder least prone topreignition) can serve as the basis forspecifying ignition timing. This makes itpossible for each cylinder to be operatedat the preignition limit, which coincideswith optimal efficiency, in virtually allranges, and throughout the life of theengine.The essential prerequisite for this kind ofknock-control system is reliable detectionof any and all preignition exceeding aspecified intensity. This must embrace
Knock control
57
Knock control
Control algorithm for ignition intervention on a 4-cylinder engine.K1...3 Knock at Cylinder 1...3
(no knock on Cyl. no. 4).a Adjusted for retarded ignition timing,b Increment for advanced ignition timing, c Advanced ignition timing.
UM
Z00
20E
Fig. 1
a b c
K1 K2 1 3 K1 K3
1
2
4
3
1 1 1 1 1 1Cyl.
αz
Igni
tion
adva
nce
angl
eCycles
Cyl.

every cylinder and extend throughout theengine’s entire operating range. Preignition is detected by sensorsdesigned to register solid-borne sonicwaves. Installed at one or severalsuitable points on the engine, theseknock sensors detect the characteristicoscillation patterns produced by knockand transform them into electrical signalssuitable for transmission to the MotronicECU for subsequent processing (refer tothe section on ignition for additionalinformation). The ECU employs a specialprocessing algorithm to detect incipientpreignition in every combustion cycle andin every cylinder. Detection of knocktriggers a specified, programmed re-duction in ignition advance. When theknock danger subsides, the ignition forthe affected cylinder is then graduallyadvanced back toward the pilot ignition-timing angle.The knock-recognition and knock-controlalgorithms are designed to prevent thekind of preignition that results in audibleknock and engine damage (Figure 1).
Adaptation
Real-world engine operation is charac-terized by different knock limits indifferent cylinders, and ignition timingmust be adjusted accordingly. In order toadapt the pilot-ignition timing to reflectthe individual knock limits under varyingoperating conditions, individual ignition-retard increments are stored for eachcylinder.These data for specific engine speedsand load factors are stored in non-volatileprogram maps in permanently-poweredRAMs. This strategy permits the engineto be operated at maximum efficiencyunder all conditions without any dangerof audible combustion knock, even duringabrupt changes in load and rpm.The engine can even be approved to runon low-octane fuels. Standard practice isto adapt the engine to run on premiumfuel.Operation with regular-grade gasolinecan also be approved.
Boost-pressurecontrol
Boost-pressure control mechanisms that rely on pneumatically-triggeredmechanical layouts use actuators(wastegates) that are directly exposed tothe pressure in the the impeller outlet. Thisconcept allows only very limited definitionof torque response as a function of enginespeed. Load control is limited to the full-load bypass. There is no provision forcompensation of the full-load boost
ME-Motronic
58
Actuator for electronic boost-pressure control
1 Cycle valve.p2 Boost pressure,pD Pressure on diaphragm,TVM Cycle valve triggering signal from ECU,VT Flow volume through turbine,VWG Flow volume through wastegate.
UM
K13
20Y
Fig. 1
1
pD
VWG
VT
TVM
p2

tolerances, and at part load, the closedwastegate impairs operating efficiency.Acceleration from low rpm can be markedby a delay in turbocharger response (avery pronounced “turbo lag”). Theseproblems can be avoided with electronicboost-pressure control (Figure 1). Thissystem can provide reductions in specificfuel consumption under some part-throttle operating conditions, controllingthe wastegate’s opening pattern to obtainthe following results:– The engine’s back-pressure losses
and the impeller’s output both drop,– Pressure and temperature at the
impeller’s discharge orifice fall, and– The pressure gradient at the throttle
valve is reduced.
The exhaust-gas turbocharger and itsboost-control device must be preciselymatched to the engine as the primaryrequirements for achieving theseimprovements.The affected components in the boost-control device are:– The electropneumatic cycle valve,– The effective diaphragm surface,
stroke and spring in the aneroidcapsule, and
– The cross section of the valve head orvalve flap in the wastegate.
ME-Motronic employs electronic boostcontrol to regulate induction pressure tothe specified value. This specified boostpressure is converted into a specificationfor the desired maximum cylinder charge.The torque-based control functionconverts this specification into a setpointfor throttle-valve aperture and a pulse-duty factor for the wastegate. The signalmodifies the wastegate’s controlpressure and stroke to regulate thebypass opening.Control-circuit elements compensate forthe difference between the setpointdefined by current operating conditions(program map) and the actual, monitoredboost pressure. The calculated value atthe controller output is then included inthe process used to define the maximumcylinder charge.On turbocharged engines, the tem-
perature of the exhaust gas betweenengine and turbine should not exceedcertain limits. This is why Motronic’s boost control operates exclusively inconjunction with knock control, as thelatter represents the only means foroperating the engine with maximumignition advance throughout its servicelife. A result of using optimal ignition timingat all operating coordinates is extremelylow exhaust-gas temperatures. Furtherreductions in exhaust temperature areavailable through intervention in cylindercharge, meaning boost pressure in thiscase, and/or air-fuel mixture.
Protective functions
Limiting vehicle and enginespeed
Extremely high engine speeds can lead topowerplant demolition (valve train,pistons). The rpm limiting functionprevents the maximum approved enginespeed (redline) from being exceeded.Incorporation of a vehicle-speed limitermay be necessary in response to specificequipment specifications as defined forvehicles in certain markets (i.e., tires,suspension). In addition, several Germanmanufacturers have made a voluntarycommitment to limit the maximum speedsof their vehicles to 250 km/h. The functions for restricting vehicle andengine speeds operate according to thesame principles. A control agorithmreduces the permitted engine output oncea specified threshold is crossed. Thisoutput limit is included in ME-Motronic’storque-based control function.
Torque and power limits
It is sometimes necessary to restrict torquegeneration in order to reduce the loading oncertain drivetrain components (such as thetransmission). ME-Motronic’s torque-based control function provides for thedefinition of such a limit. It is also possible torestrict ultimate output by governing enginespeed and torque.
Boost-pressurecontrol
59

Limiting exhaust-gastemperaturesHigh exhaust-gas temperatures candamage exhaust-system components.Therefore, a model incorporated withinthe ECU is employed to simulate thesetemperatures. Extreme requirements formonitoring precision can be satisfied byinstalling a temperature sensor. Tem-peratures beyond a defined thresholdtrigger mixture enrichment, which coolsthe exhaust by extracting heat energy to vaporize the fuel. Limiting charge den-sity and torque are additional options.
Vehicle immobilizer
To prevent unauthorized vehicle use, theMotronic ECU incorporates a feature thatprevents the engine from being starteduntil the ECU itself has been released viaa special control line. The actual releasemechanism is an encoded signalprepared by an external control unit. Thissecond control unit verifies userauthorization by analyzing the signalfrom a transmitter in the ignition key or akeypad entry code, etc.
Improved drivability
Transition surge-impactsuppressionPositive and negative load shifts –initiated by abruptly depressing orreleasing the accelerator pedal – canproduce jolts in the driveline. This effectis especially pronounced when thetorque reversal transfers forces tomounting bushings or the transmission.An example is the engine, which shiftsfrom one engine mount to the otherduring transitions from power-on topower-off. This force transfer can be prevented, orat least reduced in intensity, bycontrolling the rates of torque rise andreduction in order to achieve gentlertransitions. In order to adjust flywheeltorque (Fig. 1) this strategy relies onmanipulation of ignition timing andcylinder charge.
Surge-damping function
The fact that the engine and drivetrainrepresent a spring-mass system meansthat during operation this system canstart to oscillate. The surge-dampingfunction detects these oscillations andsuppresses them by intervening inengine output torque in the respectivephase. Oscillation recognition is basedon a comparison between a referencerpm derived from driver demand and thecurrent rpm. Intervention is throughadjustments to ignition timing. Effectivesuppression of driveline oscillationsentails implementing the torqueintervention at opposed phases to thetorque oscillation.
Cruise control
The cruise control’s function is to com-pensate for changes in rolling/aero-dynamic resistance and maintain a con-stant vehicle speed without the driver
ME-Motronic
60
Transition-surge impact suppression
UM
K17
10E
Fig. 1
Driv
er d
eman
d (t
orqu
e)F
ilter
ed
torq
ue
Time
Flywheel torque = 0

having to press the accelerator pedal. Inaddition to maintaining current vehicularvelocity, these systems provide a range ofsupplementary functions. Cruise controlthus enhances driving convenience onlong trips while also facilitating compliancewith posted speed limits.Because ME-Motronic’s throttle-valveactuator is already integrated in the ETCfunction, the supplementary effort requiredto integrate cruise control within thesystem is minimal.
Functions:
The driver uses a stalk/switch to controlthe following functions:– Adopt and then maintain the current
road-speed (set),– Accelerate and then maintain prede-
fined road-speed,– Decelerate and then maintain prede-
fined road-speed,– Accelerate to a stored target speed
(resume),– Graduated incremental increase in
defined road-speed (tip up),– Graduated incremental decrease in
defined road-speed (tip down),– Cruise control deactivation at main
switch and/or tip-off switch.
Control elements
The driver can operate the cruise-controlsystem with a single control elementwhich incorporates switches for thefunctions:– Set,– Resume,– Accelerate, and– Decelerate.Depending upon its particular config-uration, an individual switch may governmore than one function. Thus one buttonmay be used for set/decelerate and onefor resume/accelerate.In such a case, the function to beimplemented by the system when theswitch is activated will depend upon thesystem’s current status and how longpressure is applied to the switch. The tip-up and tip-down functions are triggered bybrief pressure on the switch foracceleration and deceleration. In additionto the switch components for specificfunctions, the control element may alsoinclude an optional main switch and acruise-control cancelation switch. Wherepresent, the main switch must be switchedon before entries at the function switch willbe registered. When the main switch isdeactivated, any speeds stored previ-ously will be lost. Active cruise control canalso be interrupted by applying pres-sure to the brake or clutch pedal.
Improveddrivability
61
Cruise-control operating stalk
UA
E01
41Y
Fig. 1

Integrated diagnosis
Diagnostic procedure
An “On-Board Diagnosis” (OBD) systemis standard equipment with Motronic.This integral diagnostic unit monitorsECU commands and system responseswhile also checking sensor signals forplausibility. This test program proceedscontinually during normal vehicleoperation.The ECU stores recognized errorstogether with the operating conditionsunder which they arose. When thevehicle is serviced, a tester can then beused to read out and display the storederror data through a standardizedinterface. This information facilitatesfault diagnosis procedures for servicepersonnel.Diagnosis processes extending farbeyond those in earlier systems havebeen developed to comply withmandates issued by the California AirResources Board. All componentswhose failure could cause a substantialincrease in harmful emissions must bemonitored, and detected faults musttrigger a diagnosis lamp in the in-strument panel. This expanded diag-nosis is designated OBD II.An OBD system adapted for Europeanconditions is designated EOBD.
Diagnosed areas
Air-mass meterThe process for monitoring operation ofthe air-mass meter is an example ofMotronic’s self-diagnosis function. Whilecylinder charge is being determinedbased on the mass of the induction air, asupplementary reference is calculatedat the same time from throttle-valveangle and engine speed. If the ECUdetects excessive variation between thetwo, its initial response is to record theerror. As vehicle operation continues,plausibility checks determine which ofthe sensors is defective. The ECU does
not store the designated error code untilit has unequivocally determined whichsensor is at fault.
ETC throttle-valve actuatorBecause engine output is manipulatedby adapting cylinder charge, the throttle-valve actuator must satisfy stringentdemands for reliability and diagnosis.The actuator monitors current throttle-valve position with two, mutuallycounterrotational potentiometers. Thesignals these produce are thencompared. If a deviation occurs, thesystem falls back on the intake-manifoldmodel as a basis for extrapolatingthrottle-valve position and restoringsignal plausibility.
Combustion missCombustion miss, resulting from suchfactors as worn spark plugs, allowsunburned mixture to enter the catalyticconverter. This mixture can destroy thecatalyst, and is also detrimental to theenvironment. Because even an isolatedcombustion miss produces higheremissions, the system must be able todetect it.
ME-Motronic
62
Exhaust emissions as a function of combustion miss
Engine: 6 cyl., 2.8 litre.US emissions limits.
200
150
100
50
0 0 1 2
Misfire rate
Exh
aust
em
issi
ons
(% o
f lim
it)
250
3 %
HC
CO
NOX
UM
K13
22-1
E
Fig. 1

Figure 1 shows the effects of com-bustion miss on emissions of hydro-carbons (HC), carbon monoxide (CO)and oxides of nitrogen (NOX).
In the search for a method to monitorcombustion miss, the monitoring ofinconsistencies in the crankshaft’srotational speed has emerged as thebest compromise between complexityand practicability. Combustion miss isaccompanied by a shortfall in torqueequal to the increment that wouldnormally have been produced in thecycle. The result is a reduction inrotation speed. At high speeds and lowload factors the intervals separatingfiring points (periodicity) will beextended by only 0.2 %. This means thatrotation must be monitored with extremeprecision, while extensive computationsare also required to distinguish com-bustion miss from other interferencefactors.
Catalytic converterYet another diagnostic function monitorsthe efficiency of the catalytic converter.This process relies on a second oxygensensor mounted downstream of theconverter as a supplement to the first,cat-forward unit. A healthy catalyticconverter will store oxygen, thusattenuating the lambda control oscil-lations. As the catalyst ages, this effectdeteriorates until finally the signal pat-terns from the two sensors start toconverge. Comparison of the signalsfrom the two O2 sensors thus serves asthe basis for assessing the catalyticconverter’s condition. A warning lampalerts the driver when a defect isdetected.
Lambda-Sonde
Two-state sensor (Nernst probe)A precisely stoichiometric air-fuel mix-ture is vital for optimal operation of thecatalytic converter.The lambda closed-loop control systemuses the signals from the oxygensensors to maintain this mixture.
The oxygen sensors are diagnosed for:– Electrical plausibility: The systemcontinuously assesses the sensorsignal’s plausibility. It reacts to im-plausible signals by deactivating otherlambda-related control functions whilesimultaneously entering the corres-ponding error code in the fault memory.– Sensor dynamic response (phaseduration, Figure 2): An oxygen sensorexposed to excessively high tem-peratures for an extended period of timemay start to react more slowly tochanges in the air-fuel mixture. Thisleads to extended phase durations(periodicity) in the two-state controlpattern. A diagnosis function monitorsthis control frequency and triggers adiagnosis lamp to alert the driver toexcessive response lag in the sensor.– Control range: The presence of twooxygen sensors in each exhaust line
Integrated diagnosis
63
Monitoring dynamic response of lambdaoxygen sensors
a New sensor,b Aged Type II sensor,c Aged Type III sensor,T Phase duration.
a
Sen
sor
volta
ge
b
c
Sen
sor
volta
ge
T = 3 s
T = 8 s
T = 11 s
0 10 20 30 40 s
Time
Sen
sor
volta
ge
UM
K13
23E
Fig. 2

makes it possible to use the post-catalyst (“cat-back”) sensor to check theengine-side (“cat-forward”) sensor fordrift in its effective response range.– Heater: The system checks currentand voltage to the oxygen sensor’sheater resistor. For this check theMotronic ECU must rely on a direct linkto the heater resistor, instead ofcontrolling it through a relay.
LSU wide-band sensorWith the introduction of the LSU wide-band oxygen sensor it is now possible tomonitor specified mixtures other than λ = 1. The ongoing lambda control pro-cess uses a “cat-forward” control circuitwith an LSU, complimented by a super-imposed “cat-back” circuit featuring atwo-state sensor. This strategy makes itpossible to assess the LSU’s operation
with the aid of the two-state sensor. Thediagnosis process includes the followingelements:
– Electrical plausibility: One feature thatdistinguishes the LSU sensor from itstwo-state counterpart is that thepotential spectrum of plausible signalsextends throughout the entire voltagerange. In addition to checking upper andlower limit values, the system alsocompares its signal with that beingtransmitted from the sensor mounteddownstream of the catalytic converter.– Sensor dynamic response: Diagnosisbased on assessment of a mandatory,superimposed amplitude.– Control range: The second, “cat-back” sensor is used to verify compli-ance with a delta lambda threshold.
ME-Motronic
64
Reference leak test for detecting fuel-system leakage
1 Throttle valve, 2 Engine, 3 ECU, 4 Canister-purge valve, 5 Activated-charcoal canister, 6 Diagnosis module, 7 Reference leak, 8 Circuit-control valve, 9 Electric air pump, 10 Filter, 11 Fresh air, 12 Fuel tank,13 Leak.
Fig. 3
UM
K16
82Y
������������������
M
32
1
4
5
6
78
9 10
1312
11

– Heater: This process is the same oneused with the two-state sensor, whileongoing variations in the lambda signalare also evaluated.
Fuel supplyWhen the air-fuel ratio deviates fromstoichiometric for extended periods oftime, the system recognizes this state,with the mixture adaptation serving asone reference. If the deviations exceedspecific programmed limits, thisindicates that a fuel-system or fuel-metering component has shifted outsideits specified tolerance range. Anexample would be a faulty pressureregulator or cylinder-charge sensor (forinstance, the hot-film air-mass meter),while other potential error sourcesinclude leaks at the intake manifold or inthe exhaust system.
Tank systemEmissions emanating from the exhaustsystem are not the sole element ofecological concern; vapors from the fueltank are also a problem. While current requirements for theEuropean market are limited to arelatively simple check to verify correctoperation of the purge valve, USmandates already demand a means ofdetecting leakage at any and all pointswithin the evaporative-emissions controlsystem.
Vacuum testThe diagnosis process relies on analysisunder vacuum. A shut-off valve is usedto block the fresh-air supply to thecarbon canister and seal off the vaporretention system. Then, preferably withthe engine running at idle, the purgevalve is opened and vacuum from theintake manifold propagates throughoutthe system. A tank-mounted pressuresensor monitors the subsequentpressure curve to determine whetherleakage is present.
Reference leak procedureYet another process for diagnosing fueltank leakage (Figure 3) relies on an
electric air pump (9) to pressurize thetank (12). Instead of monitoringpressure with a pressure sensor, thistest uses the pump’s current draw as itstest parameter. The first step iscalibration, based on simulating areference leak (7) with a defined flow atthe purge valve. Then a circuit-controlvalve (8) is used to link the pump withthe activated-charcoal canister (5). Theresulting current pattern will point to anyleakage present in the fuel system(Figure 4).
Secondary-air injectionThe secondary-air injection activatedfollowing cold starts must also bemonitored, as its failure would also effectemissions. This can be done using thesignals from the lambda oxygen sensorwhile the secondary-air injection is inoperation, or the injection can beactivated and observed at idle using aspecial lambda test function.
Exhaust-gas recirculationBecause exhaust-gas recirculation(EGR) permits reductions in theconcentrations of nitrous oxides in theexhaust gas, the operational integrity ofthis system must also be monitored.Opening the EGR valve conducts part ofthe exhaust-gas flow back into the intakemanifold. As this supplementary flow ofresidual gases enters the manifold and
Integrated diagnosis
65
Schematic portrayal of pump current curve during pressurization test on fuel system
UM
K16
83E
Fig. 4
Reference leak 0.5 mm
Sealed system
Leak 0.5 mm
Leak > 0.8 mmReferencemeasurement
Tank diagnosis
Mot
or c
urre
nt l
Test period

then the cylinders, it initially affectsmanifold vacuum, and then, subse-quently, the combustion process. Thischaracteristic opens two options fordiagnosing the EGR system:
Diagnosis based on manifold vacuumThe EGR valve is briefly closed underpart-throttle operation. If ETC is used tohold the flow of induction air passingthrough the hot-film air-mass meter at aconstant level, the valve will shift theintake-manifold vacuum. This change ismonitored with the manifold pressuresensor, and its magnitude is an index ofthe EGR system’s condition.
Diagnosis based on idling stabilityThis method is employed on systemswithout hot-film air-mass meter orsupplementary intake-manifold pres-sure sensor. At idle, the EGR valve isopened slightly. The increased mass ofresidual gas leads to rougher engineoperation. This, in turn, is detected bythe system’s smooth-running monitoringsystem which applies the rough runningto diagnose the EGR system.
Other monitoring functionsWhile the new emissions statutes focuson the engine-management system,other systems (such as the electronictransmission-shift control) are alsomonitored. These relay data on anyfaults to the engine-management ECU,which then assumes responsibility fortriggering the diagnosis lamp.Greater system complexity and in-creasingly stringent environmental legis-lation are making diagnosis increasinglyimportant.
Diagnosis sequence schedulingOBD II demands completion of alldiagnosis functions at least once in thecourse of the emissions test cycle. Theformer scheduling concept triggered theindividual diagnosis functions accordingto an invariable scheme; the pattern wasdictated by the operating conditions thatcharacterized the individual stages ofthe emissions test cycle. Under normal
operating conditions, this strategy couldlead to extended delays before the rightoperating conditions for initiating aspecific diagnosis process wereencountered. In practice this means thatsome diagnostic procedures might beperformed only rarely, as individualdriving habits could render it impossiblefor the system to adhere to thescheduled diagnosis sequence.Diagnosis System Management canrespond to operating conditions andinitiate dynamic adjustments in thediagnostic sequence to allow optimaldiagnosis processing in daily operation.
Fault memoryDetection of emissions-relevantmalfunctions leads to an entry in thenon-volatile fault memory. While thisentry reflects the officially mandatederror codes, it also includes a “freezeframe” consisting of supplementaryinformation on the operating conditionsunder which the error occurs (i.e.,engine speed and temperature).Depending on the system project,malfunctions of significance for vehicleservicing are also stored, although notincluded in the OBD II catalog.Error codes can be read out byconnecting the client’s own servicetester or a Bosch Motortester (Figure 5)to the ECU interface. The sameequipment can be used to record testdata (such as engine speed). OBD IIprescribes standardized protocols forstoring malfunction data as defined bythe SAE (Society of AutomotiveEngineers). This makes it possible toaccess the fault memory using standard,commercially-available “scan tools.”
ME-Motronic
66

Emergency (limp-home)mode
In the interval elapsing between initialoccurrence of a fault and the sub-sequent vehicle workshop visit, ignitiontiming and air-fuel mixtures can beprocessed based on default values andemergency-running functions. Thisallows continued vehicle operation,albeit with sacrifices in comfort andconvenience. The ECU responds torecognized errors in an input line bysubstituting data from a simulationmodel or by falling back on a redundantsignal.Failure in units on the output side initiateimplementation of specific backupmeasures corresponding to the in-dividual problem. As an example, thesystem can react to a defect in the ignitioncircuit by suppressing fuel injection at theaffected cylinder to prevent damage tothe catalytic converter.The ETC throttle-valve actuator has aspring-loaded default position. Thismaintains engine operation at low rpm,allowing ME systems to continue inrestricted operation in the event offailure in the vital ETC circuit.
Actuator diagnosis
During normal driving, many Motronicfunctions (e.g., EGR) are operationalonly under specific conditions. Thisrenders it impossible to activate allactuators (such as the EGR valve) foroperational checks while on the road.Actuator diagnosis represents a uniquecase within the range of diagnosticprocesses. It proceeds with the engineoff, and never during normal operation.This test mode relies on the enginetester, which serves as the triggeringdevice for operational checks in theservice workshop. The actual testprocess entails activation of eachactuator in sequence. Operation canthen be verified using acoustic or othermeans.In this mode the injectors should only betriggered with extremely brief pulses (< 1 ms). Although this is not enoughtime for the injector to open completely,and no fuel is injected into the manifold,the sound can be clearly heard.
Integrated diagnosis
67
Fig. 5Bosch KTS 500 Motortester in use
UA
E06
90Y

ECU
PurposeThis ECU (Figure 1) serves as the“processing and control center” for theengine-management system. It employsstored functions and algorithms(processing programs) to process theincoming signals from the sensors.These signals serve as the basis forcalculating the control signals to theactuators (such as ignition coil andinjectors) which it controls directlythrough its driver stages (3).
Physical designThe ECU has a metal housing containinga printed circuit board (2) with electroniccomponentry. Compact units whichfeature hybrid technology are availablefor installation directly on the engine.They are specially designed to withstandhigher thermal stresses.A multi-terminal plug connects the ECUto its sensors and actuators, as well as toits power supply. The number ofindividual terminals within this interfacevaries according to the number offunctions covered by the ECU. More than100 terminals must usually be included inthe ME-Motronic connector plugs.The PCB has a metal base underneaththe output amplifier circuitry, wherethrough-hole contacts provide goodthermal transfer to its lower side. Fromhere the heat generated by the outputamplifier circuits is transferred throughheat bridges to the housing.
Environmental conditionsThe ECU must withstand extremetemperatures, humidity and physicalstresses. Resistance to incomingelectromagnetic interference and theability to suppress outward-boundradiation of high-frequency static mustalso be of a high order.Under normal operating conditions theECU must be capable of errorless sig-nal processing at environmental tem-peratures ranging from –30°C to +60 °C, at with battery voltages that
extend from 6 V (during starting) to 15 V.
Power supplyA voltage regulator (10) provides theECU with the constant 5 V operatingpower needed for the digital circuitry.
Signal entryThe sensor signals enter the ECU viaprotective circuits, and through signalconverters and amplifiers where in-dicated:– Analog-digital (A/D) convertersintegrated in the microprocesors (4, 7)transform analog input signals (e.g.,information on accelerator-pedal posi-tion, induction air mass, engine andintake-air temperature, battery voltage,air-fuel mixture ratio, etc.) into digitalizeddata.– Digital input signals (such as switchingsignals from the air conditioner ortransmission selector lever, but alsoincluding digital signals such as rpmpulses from Hall sensors) are suitable fordirect processing in the microprocessor.– Incoming signals in pulse formtransmitted by inductive sensors furnishinformation on vehicle speed as well ason crankshaft speed and angle. Theseare processed in a special circuit (10)and converted into square-wave signals.Depending upon the system’s integrationlevel, initial signal processing may bepartially or completely performed in thesensor itself. Input information arrivingthrough the data bus (CAN) also arriveswithout need for preliminary processing.
Signal processingInput signals are handled by themicroprocessor within the ECU. In orderto function, this microprocessor must be equipped with a signal-processingprogram stored in a non-volatile mem-ory (ROM or EPROM, 5). This memoryalso contains the specific individualperformance curves and program maps(data) used to govern the engine-management system.Owing to the large number of engine andvehicle variations with their extensive
ME-Motronic
68

individual ranges of data requirements,the ECUs are not programmed until theyreach the end of the production line.There is no need to open up the ECU forthis procedure. This reduces the numberof ECU configurations required by anysingle vehicle manufacturer.A read/write memory (RAM) is neededfor storing calculated values andadaptation factors along with any systemerrors that may be detected (diagnosis).RAMs rely on an uninterrupted powersupply for continued operation, and loseall data if the vehicle’s battery isdisconnected. The ECU must thenrecalculate the adaptation factors afterthe battery is reconnected. To get aroundthis problem, some units store requiredvariables in an EEPROM (6, non-volatilememory) instead of a RAM.
Signal outputThe microprocessor-controlled outputamplifier (driver) circuits supply sufficientpower for direct operation of theactuators. These driver circuits areprotected against shorts to ground,fluctuations in battery voltage and theelectrical overloads that could destroythem. The OBD diagnosis function isable to recognizes errors in the driverstages, and reacts by deactivating therespective output (where necessary).The error entry is stored in the RAM. Theservice technician can then access theerror information by connecting a testerto the serial interface.Another protective circuit operatesindependently of the ECU to deactivatethe electric fuel pump when enginespeed falls below a specified level. Whenthe Terminal 15 power supply isinterrupted at the ignition switch (“ignitionoff”), some ECUs rely on a holding circuitto keep the main relay open until programprocessing can be completed.
Electronic control unit
69
ME7 Electronic control unit
1 Multi-terminal plug connection,2 Printed circuit board,3 Driver stages,4 Microprocessor with ROM
(function processor),5 Flash EPROM (supplementary
memory with program for specific vehicle),
6 EEPROM,7 Microprocessor with ROM
(expansion processor),8 Flash EPROM
(program memory for expansion processor),
9 Barometric-pressure sensor,10 CJ910 peripheral chip
(integrated 5V voltage supply and inductive sensor evaluation circuit).
RAM is on the underside of the PCB and thus invisible in this figure.
1
6
7
8
3
910
2
3
35
4
UA
E06
97Y
Fig. 1

Interfaces to othersystems
System overview
Increasingly widespread application ofelectronic control systems for automotivefunctions such as– Electronic engine management
(Motronic),– Electronic transmission-shift control,– Electronic vehicle immobilizers,– Antilock braking systems (ABS),– Traction control system (TCS), and– On-board computershas made it vital to interconnect theindividual control circuits by means ofnetworks. Data transfer between thevarious control systems reduces thenumber of sensors while also promotingexploitation of the performance potentialin the individual systems.
The interfaces can be divided into twocategories:– Conventional interfaces, with binary
signals (switch inputs), pulse-dutyfactors (pulse-width modulated sig-nals), and
– Serial data transmission, e.g., Con-troller Area Network (CAN).
Conventional interfacesIn conventional automotive data-communications systems each signal isassigned to a single line. Binary signalscan only be transmitted as one of twoconditions: “1” or “0” (binary code). Anexample would be the a/c compressor,which can be “on” or “off.” Pulse-duty factors can be employed torelay more detailed data, such as throttle-valve aperture.Increasing data traffic between variouson-board electronic components meansthat conventional interfaces are no longercapable of providing satisfactoryperformance. The complexity of currentwiring harnesses is already difficult tomanage, and the requirements for data
communications between ECUs are onthe rise (Figure 1).
Serial data transmission(CAN)These problems can be solved with aCAN, that is, a bus system (bus bar)specially designed for automotive appli-cations.Provided that the ECU’s are equippedwith a serial CAN interface, CAN can beused to relay the signals from thesources listed above.
There are three basic applications forCAN in motor vehicles:– To link ECU’s,– Body-related and convenience
electronics (multiplex), and– Mobile communications.The following is limited to a description ofcommunications between ECUs.
ECU networkingThis strategy links electronic systemssuch as Motronic, electronic trans-mission-shift control, etc. Typical trans-mission rates lie between approximately125 kBit/s and 1 MBit/s, and must be highenough to maintain the required real-timeresponse. One of the advantages thatdistinguishes serial data transfer fromconventional interfaces (pulse-dutyfactors, switching and analog signals,
ME-Motronic
70
Conventional data transmission
Transmission-shift control
Motronic
ABS/TCSElectronic
vehicleimmobilizer
Fig. 1
UM
K16
76-1
E

etc.) is the high speeds achieved withoutplacing major burdens on the centralprocessing units (CPU’s).
Bus configurationCAN works on the “multiple master”principle. This concept combines severalECU’s with equal priority ratings in alinear bus structure (Figure 2).The advantage of this structure is thatfailure of one subscriber will not affectaccess for the others. The probability oftotal failure is thus substantially lowerthan with other logical configurations(such as loop or star structures). With loop or star architecture, failure inone of the subscribers or the central ECUwill provoke total system failure.
Content-keyed addressingThe CAN bus system addresses dataaccording to content. Each message isassigned a permanent eleven-bit iden-tifier tag indicating the contents of themessage (e.g., engine speed). Eachstation processes only the data for whichidentifiers are stored in its acceptance list(acceptance check). This means thatCAN does not need station addresses totransmit data, and the interfaces do notneed to administer system configuration.
Bus arbitrationEach station can begin transmitting itshighest priority message as soon as thebus is unoccupied. If several stations initiate transmissionsimultaneously, the resulting bus-accessconflict is resolved using a “wired-and”arbitration arrangement. This conceptgrants first access to the message withthe highest priority rating, with no loss ofeither time or data bits.When a station loses the arbitration, itautomatically reverts to standby statusand repeats the transmission attempt assoon as the bus indicates that it is free.
Message formatA data frame of less than 130 bits inlength is created for transmissions to thebus. This ensures that the queue timeuntil the next – possibly extremely urgent– data transmission is held to a minimum.The data frames consist of sevenconsecutive fields.
StandardizationThe International Organization forStandardisation (ISO) has recognized aCAN standard for use in automotiveapplications with data rates of over 125kBit/s, and along with two other protocolsfor data rates of up to 125 kBit/s.
Interfaces
71
Linear bus structure
Station1
Station2
Station3
Station4
UA
E02
83E
Fig. 2

(1.0)1 987 722 178KH/PDI2-09.99-En