Embed Size (px)
Citation preview
7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 1/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 1
ManufacturingControls
FALL 2001

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 2/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 2
Manufacturing Controls
20-IND-475-001
TIME: 11:00--12:15 PM, Tuesday and Thursday;Room: 617 ERC
INSTRUCTOR: Professor Ernest L. Hall, P.E. GeierProfessor of Robotics
PHONE: 556-2730, Email: [email protected] OFFICE HOURS: 1:00--2:00 and 3:30--4:30 PM,
TH, 681 or 508 Rhodes
WWW: http://www.eng.uc.edu/~elhall/mc.html
TEXT: Devdas Shetty and Richard A. Kolk,Mechatronics System Design, PWS Publishing,Boston.
NOTES: www.robotics.uc.edu/MC2001/

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 3/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 3
Course objective
To provide a broad basis for understanding
modern digital control theory for
manufacturing
with enough detailed examples to provide
practical experience in understanding stability
and tuning of digital motion controllers using
modern design tools such as Matlab.

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 4/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 4
Syllabus
DATE TOPIC NOTES 1. Sep. 20 Mechatronics Design Process Ch. 1
2. Sep. 25 System Modeling and Simulation Ch. 2
3. Sep. 27 Laplace Transforms and Transfer Functions Ch. 2
4. Oct. 2 Electrical Examples Ch.2, Notes 5. Oct. 4 Mechanical Examples Ch.2, Notes
6. Oct. 9 Thermal and Fluid Examples, QUIZ 1 (Take Home)
7. Oct. 11 Sensors and Transducers Ch. 3
8. Oct. 16 Advanced MATLAB
9. Oct. 18 Analog and Digital Sensing Ch. 3,
Notes 10. Oct. 23 Actuating Devices Ch. 4
11. Oct. 25 DC Motor Model Ch. 4,Notes
12. Oct. 30 Boolean Logic Ch. 5
13. Nov. 1 Programmable Logic Controllers Ch. 5, Notes
14. Nov. 6 Stability and Compensators, P, PI and PD Ch. 6
15. Nov. 8 PID Controllers Ch. 7
16. Nov. 13 QUIZ 2 (In Class - Open Book)
17. Nov. 15 Practical and Optimal Compensator Design Ch. 8 18. Nov. 20 Frequency Response Methods Ch. 9, Notes
19. Nov. 22 THANKSGIVING HOLIDAY Ch. 9, Notes
20. Nov. 27 Optimal Design of a Motion Control System Ch. 9, Notes
21. Nov. 29 QUIZ 3 (In Class - Closed Book)
22. Dec. FINAL EXAM (In Class - Closed Book) Comprehensive

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 5/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 5
Grading System
FG = .2(Q1 + Q2 + Q3 + F + HW)
Where
FG = Final grade Qi = Quiz i
F = Final exam
HW = Homework.

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 6/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 6
Note to Students:
You are expected to attend class, read the
text, and use the computer. Computer
accounts and Email are required. You will
find MATLAB essential for some of the
homework. The syllabus topics are guidelines
and may be adapted as required to improve
your understanding during the quarter.
7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 7/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 7
Today’s objective
To provide an introduction to systems theory
and the use of Matlab by studying a simple
example, the flexible link pendulum.

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 8/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 8
Plant
System
Human – not yet fully
understood
Machine – Linear and
non-linear systemstheory
Man-Machine – Best of
both
Has both input and
output - normally

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 9/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 9
Architecture of System
Uncontrollable
Example - sun
Plant

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 10/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 10
Architecture of System
Unobservable
Example – black hole
Plant

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 11/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 11
Non-servo system
Plant
connection
(b) Non-servo system

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 12/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 12
Feedback Control
Feedback system – measurements
compared to input and error used to drive
plant
Plant
connection
Sensors

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 13/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 13
Digital Motion Control
Motion control is one of thetechnological foundations ofindustrial automation.
motion of a product
path of a cutting tool motion of an industrial robot
arm conducting seamwelding
motion of a parcel beingmoved from a storage bin toa loading dock by ashipping cart
The control of motion is afundamental concern.

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 14/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 14
Control theory
Control theory is a foundation formany fields, including industrialautomation. The concept ofcontrol theory is so broad that itcan be used in studying the economy
human behavior spacecraft design
industrial robots
Automated guided vehicles
Motion control systems oftenplay a vital part of productmanufacturing, assembly, and
distribution.

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 15/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 15
Mechatronics
Motion Control is defined by the American Institute of MotionEngineers as:
"The broad application of varioustechnologies to apply a controlledforce to achieve useful motion in
fluid or solid electromechanicalsystems."
The field of motion control can alsobe considered as mechatronics.
"Mechatronics is the synergisticcombination of mechanical andelectrical engineering, computerscience, and informationtechnology, which includes controlsystems as well as numericalmethods used to design productswith built-in intelligence."

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 16/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 16
Components
The components of a typical servocontrolled motion control system mayinclude
an operator interface
motion control computer
control compensator
electronic drive amplifiers Actuator
Sensors
Transducers
and the necessary interconnections.
The actuators may be powered byelectro-mechanical, hydraulic or
pneumatic or a combination of thesepower sources.

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 17/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 17
Motion Control Example
Consider the simple pendulumshown that has been studied formore than 2000 years.
Aristotle first observed that a bobswinging on a string would cometo rest, seeking a lower state of
energy. Later, Galileo Galilee made a
number of incredible, intuitiveinferences from observing thependulum.
Galileo’s conclusions are even
more impressive considering thathe made his discoveries beforethe invention of calculus.
s
L
M
(a) Physical
diagram
(b) Free body
diagram
s
T
D
W=Mg

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 18/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 18
Flexible Link Pendulum
The pendulum may be described as abob with mass, M, and weight given byW=Mg, where g is the acceleration ofgravity, attached to the end of a flexiblecord of length, L as shown.
When the bob is displaced by an angle ,the vertical weight component causes a
restoring force to act on it. Assuming that viscous damping, from
resistance in the medium, with a dampingfactor, D, causes a retarding forceproportional to its angular velocity, w,equal to D.
Since this is a homogeneous, unforcedsystem, the starting motion is set by theinitial conditions. Let the angle at time(t=0) be 45 .
For definiteness let the weight, W = 40lbs., the length, L = 3 ft, D = 0.1 (lb.s) andg=32.2 (ft/s2).
s
L
M
(a) Physical
diagram
(b) Free body
diagram
s
T
D
W=Mg

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 19/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 19
Free Body Diagram
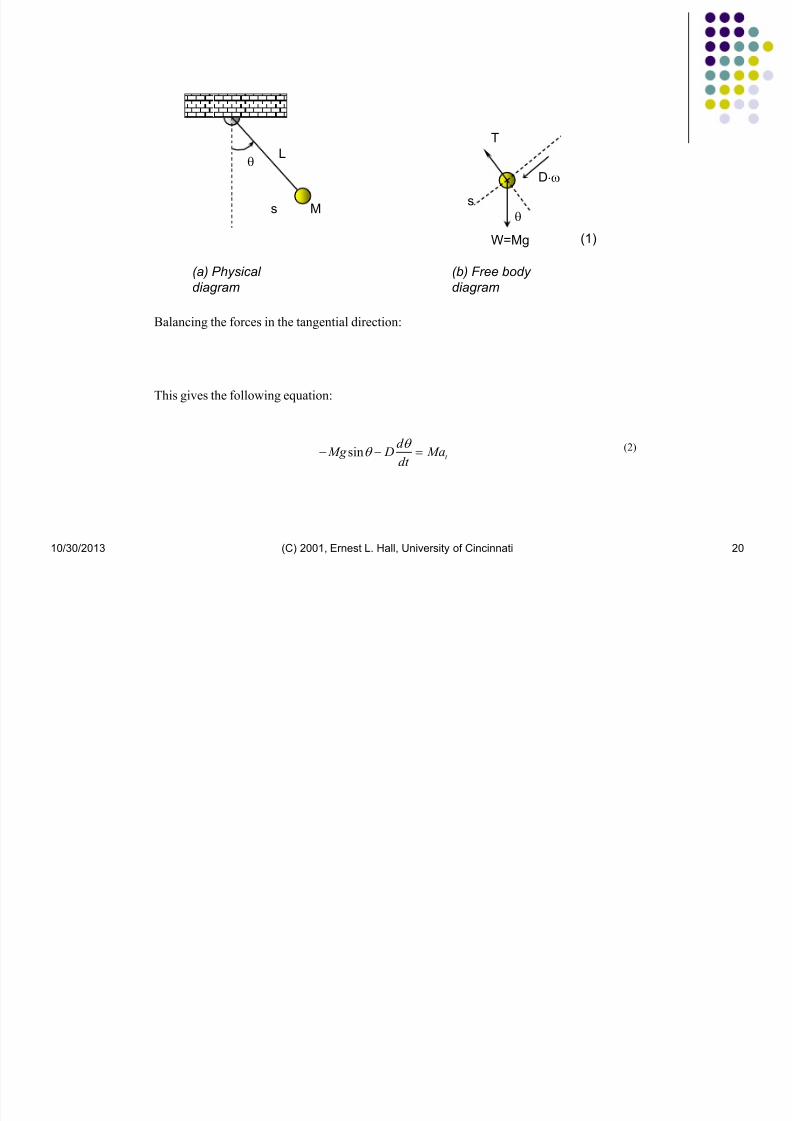
The analysis is begun by drawing afree body diagram of the forcesacting on the mass. We will use thetangent and normal components todescribe the forces acting on themass. The free body diagramshown and Newton's second law arethen used to derive a differentialequation describing the dynamicresponse of the system.
Forces may be balanced in anydirection, however, a particularlysimple form of the equation forpendulum motion can be developed
by balancing the forces in thetangential direction:
s
T
D
W=Mg
7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 20/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 20
s
L
M
(a) Physical
diagram
(b) Free body
diagram
s
T
D
W=Mg
(1)
Balancing the forces in the tangential direction:
This gives the following equation:
Mg Dd
dt Mat sin
(2)

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 21/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 21
adv
dt
d s
dt t
2
2 (3)
s L (4)
a Ld
dt t
2
2
(5)
The tangential acceleration is given in terms of the rate of change of velocity or arc length by the equation:
Since the arc length, s, is given by:
Substituting s into the differential in Equation 3 yields:

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 22/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 22
Combining Equation 2 and Equation 5 yields:
Note that the unit of each term is force. In English units, W is in lbf , g is in ft./sec2, D is in
lb.sec, L is in feet, is in radians, d/dt is in rad/sec and d2/dt
2 is in rad/sec
2. In international
SI units, M is in kg, g is in m/sec2, D is in kg-m/sec, L is in meters, is in radians, d/dt is in
rad/sec and d2/dt
2 is in rad/sec
2.
This may be rewritten as:
d dt
D ML
d dt
g L
2
20 sin (7)
Mg Dd
dt Ma ML
d
dt t sin
2
2(6)
7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 23/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 23
System
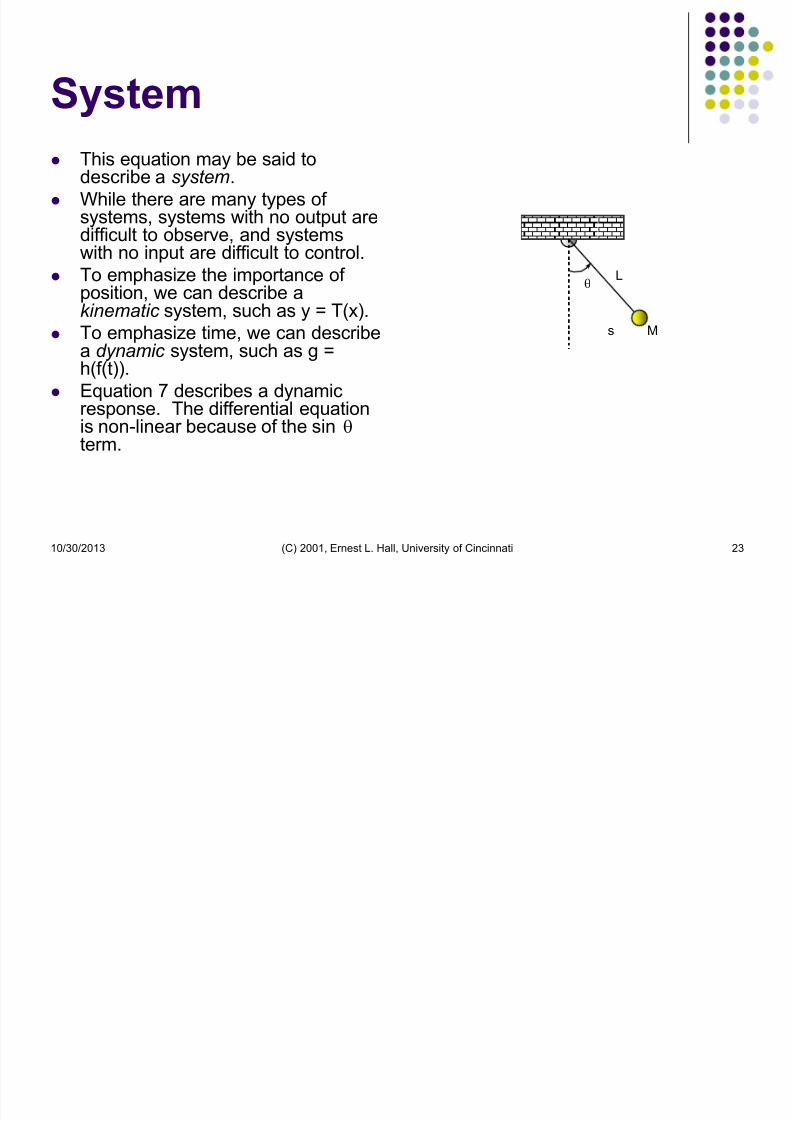
This equation may be said todescribe a system.
While there are many types ofsystems, systems with no output aredifficult to observe, and systemswith no input are difficult to control.
To emphasize the importance ofposition, we can describe akinematic system, such as y = T(x).
To emphasize time, we can describea dynamic system, such as g =h(f(t)).
Equation 7 describes a dynamic
response. The differential equationis non-linear because of the sin term.
s
L
M

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 24/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 24
For a linear system, y = T (x), two conditions must be satisfied:
1. If a constant, a, is multiplied by the input, x, such that ax is applied as the input, then
the output must be multiplied by the same constant, as in Equation 8:
2. If the sum of two inputs is applied, the output must be the sum of the individual
outputs and the principal of superposition must hold as demonstrated by the following
equations:
where
and
T x y( )2 2 (11)
T x x y y( )1 2 1 2 (9)
T ax ay( ) (8)
T x y( )1 1 (10)

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 25/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 25
This may be rewritten as:
d
dt
D
ML
d
dt
g
L
2
20
sin (7)
Equation 7 is non-linear because the sine of the sum of two angles is not equal to the sum of
the sines of the two angles. For example, sin(45) = 0.707 while sin(90) = 1.

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 26/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 26
Linear approach modeling
Returning to the pendulum example, the solution to this non-linear equation with D=0
involves the elliptic function. (The solutions of this non-linear system will be investigated
later using Simulink.) Using the approximation sin = in Equation 7 gives the linear
approximation:
d
dt
D
ML
d
dt
g
L
2
20
(27)

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 27/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 27
Simple Harmonic Motion
When D=0, Equation 27 simplifies to the linear differential equation for simple harmonic
motion:
d
dt
g
L
2
20
(28)
7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 28/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 28
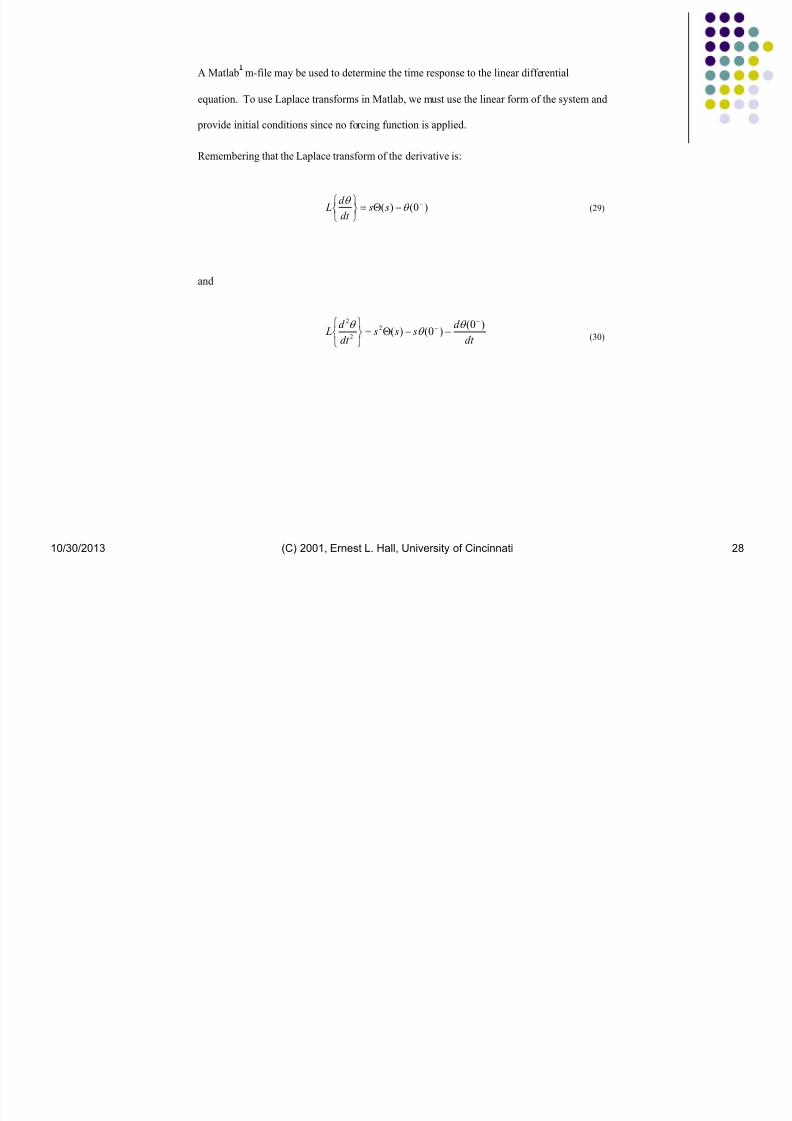
Matlab m-file may be used to determine the time response to the linear differential
equation. To use Laplace transforms in Matlab, we must use the linear form of the system and
provide initial conditions since no forcing function is applied.
Remembering that the Laplace transform of the derivative is:
and
(29))0()(
s sdt
d L
(30)dt
d s s s
dt
d L
)0()0()(2
2
2

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 29/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 29
Taking the Laplace transform of the linear differential Equation 27 gives:
This may be simplified to:
(31) s s sd
dt
D
ML s s
g
L s2 0
00 0 ( ) ( )
( )( ) ( ) ( )
(32)( )( ) ( )
( )
s s
D
ML
d
dt
s D
ML s
g
L
0 00
2

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 30/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 30
(Note that the initial conditions act as a forcing function for the system to start it moving.) It is
more common to apply a step function to start a system. The unit step function is defined as:
(Note that the unit step function is the integral of the delta function.) It may also be shown
that the Laplace transform of the delta function is 1, and that the Laplace transform of the unit
step function is 1/s.
0
0
0
1)(
t
t
for
for t u
(33)

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 31/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 31
To use Matlab to solve the transfer function for (t), we must tell Matlab that this is the output
of some system. Since G(s) = H(s)F(s), we can let H(s) = 1 and F(s) = (s). Then the output
will be G(s) = (s), and the impulse function can be used directly. If Matlab does not have an
impulse response but it does have a step response, then a slight manipulation is required.
(Note that the impulse response of system G(s) is the same as the step response of system s
(G(s)).)

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 32/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 32
The transform function with numerical values substituted is:
( )( . )
. . s
s
s s
45 0 0268
0 0268 10 732
(34)

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 33/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 33
Note that (0) = 45, and d/dt = 0. We can define T0 = (0) for ease of
typing, and express the numerator and denominator polynomials by their
coefficients as shown by the num and den vectors below.
To develop a Matlab m-file script using the step function, define the parameters
from the problem statement:
T0 =45
D = 0.1
M = 40/32.2
L = 3
G=32.3
num = [T0, D*T0/(M*L), 0];
den = [1, D/(M*L), G/L ];
t= 0:0.1:10;
step(num,den,t);
grid on
title('Time response of the pendulum linear approximation')

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 34/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 34
This m-file or script may be run using Matlab and should produce an oscillatory output. The
angle starts at 45 degrees at time 0 and goes in the negative direction first, then oscillates to
some positive angle and dampens out. The period, T in seconds (or frequency, f = 1/T in
cycles/second or Hertz) of the response can be compared to the theoretical solution for an
undamped pendulum given in Equation 35 [4]. The is shown in Figure 3.
T L
g 2
(35)

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 35/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 35
Now try it!
Use Matlab to solve the
pendulum.
Just open a new
workspace in Matlab. Copy the sample
program.
Run the m-file.0 2 4 6 8 10
-50
0
50
Time (Seconds)
me response o pen u um w near approxma on
D e g r e e s
Figure 3. Pendulum response with linear
approximation. (0+)=45

7/27/2019 MCLECTURE1.PPT
http://slidepdf.com/reader/full/mclecture1ppt 36/36
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati 36
Homework 1
Now capture your Matlab program and output
and format it on a Word page. Put you name
on the page and turn it in to me as your first
homework assignment.