Embed Size (px)
DESCRIPTION
Fast Luminosity Dither. M. Sullivan for D. Arnett, S. DeBarger, S. Ecklund, C. Field, A. Fisher, S. Gierman, P. Grossberg, M. Petree, K. Krauter, A. Kulikov, E. Miller, K. Sonnad, N. Spencer, K. Underwood, U. Wienands Machine Advisory Committee Review January 18-20, 2006. Outline. - PowerPoint PPT Presentation
Citation preview

1
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
M. Sullivan
for
D. Arnett, S. DeBarger, S. Ecklund, C. Field, A. Fisher,
S. Gierman, P. Grossberg, M. Petree, K. Krauter,
A. Kulikov, E. Miller, K. Sonnad, N. Spencer,
K. Underwood, U. Wienands
Machine Advisory Committee Review
January 18-20, 2006
Fast Luminosity Dither

2
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Outline
• Present luminosity feedback
• New fast feedback
– General Characteristics – weekly meetings
– Hardware
– Software
• Summary

3
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Present Feedback system
• Presently we keep the beams in collision by dithering the HEB while monitoring the luminosity signal and then move the HEB to the LEB in order to maximize the luminosity signal.
• We use 8 correctors in the HEB (4 for X and 4 for Y) to move the HEB beam back and forth in the X, Y and Y angle dimensions. The feedback moves the beam left then right, then calculates the peak of the luminosity with a parabolic fit and then moves the beam to the newly calculated peak.
• The process is repeated for the Y dimension and then for the Y angle. There is at least a 5/8 sec settle time for the corrector magnets for each beam move. This means the present system speed is dominated by the corrector magnet settle time. There are 5 magnet moves for each dimension and three dimensions so it takes at least 8 sec to complete a full go-around of the feedback.
• Several times over the last few years we have thought of trying to make a faster luminosity feedback system, but could not come up with a location for some air coils until we finally thought of using locations near the HER fast separator magnets. These magnets need a thin stainless steel beam pipe which is exactly what the new system needs.

4
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
New Luminosity Feedback
• The new idea is to use air coils that can be driven at frequencies of around 100 Hz.
• We simultaneously excite the coils at 3 different frequencies – one for each dimension and detect the 3 signals with separate lock-in amplifiers.
• The lock-ins deliver an amplitude and sign for each dimension. The sign indicates which direction to move.
• The feedback algorithm then uses this information to decide how much to step in each dimension.
• The 3 steps are then added together and the magnets are moved in all 3 dimensions at once.
• We should immediately gain a factor of about 8 in speed and hope to improve that even more by using an improved algorithm that decides how much to move the beam .

5
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Luminosity signal
• We have a very high rate luminosity signal that we have not been fully utilizing
• Clive Field says that at luminosities of near 1e34 nearly every crossing produces a hit in his detector. This corresponds to a signal rate of well over 100 MHz.
• Our present minimum luminosity signal is 1e30 which should still have a signal rate of something like 10 kHz
• The background level for the luminosity signal is less than 1e29 at low to moderate beam currents
• Work is going on to provide a couple of signals. The trick is to get a fast enough response time without too much noise.

6
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Coil Design and Hardware• The design and construction of the coils include:
– Inductance calculations and measurements– Field penetration and phase shift measurements– Field uniformity calculations– Power handling capacity – air cooled
• The kick angles needed for the beam movements were calculated from the MAD model of the HER. This gives us initial coefficients to make closed bumps around the IP.
• There are two different beam pipes for the coils so calculations and measurements had to be made for both locations.
• There are two very good presentations by Steve Gierman and Alan Fisher on more details at these links:
– http://www.slac.stanford.edu/~sullivan/Fast_Dither/2005_10_19%20Design%20Review/fast_dither_19oct05%20Gierman.pdf
– http://www.slac.stanford.edu/~sullivan/Fast_Dither/2005_10_19%20Design%20Review/Fast-DitherDesgnReview-2005-10-19%20Fisher.pdf

7
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
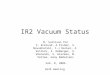
5″ 6.3″
5″ 4.9″
4″ OD beam pipe± 31 x 7.7 mm stayclear
5.29″ x 2.34″ beam pipe± 53 x 27 mm stayclear
BSEP1 chambersat ± 50 meters
BSEP2 chambersat ± 30 meters
Beamline geometryFrom Steve Gierman’s design review presentation

8
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
0 2 4 6 8 10 12 14yy
0.998
0.9985
0.999
0.9995
1ykick 7.7` 31.`mm
0 2 4 6 8 10 12 14xx1
1.002
1.004
1.006
1.008
xkick 31.` 7.7`mm
0 2 4 6 8 10 12 14yy0.99
1
1.01
1.02
1.03
ykick 27.` 53.`mm
0 2 4 6 8 10 12 14xx
0.995
1
1.005
1.01
1.015
1.02
1.025
xkick 53.` 27.`mm
Normalized field integrals within one stay-clear quadrant
Field uniformity
50 m
30 m

9
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Field penetration at 30 meters6″
5″
stainless steel mock-up chamber 5.294″ x 2.34″ x 20″ 3/16″ wall thickness
slopes are 0.060 deg/Hz and 0.099 deg/Hz
0 50 100 150 200frequency Hz
20
15
10
5
0
ged
phase shift
0 50 100 150 200frequency Hz
0
1
2
3
4
5
6
reptnec
relative attenuation

10
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Coil Hardware
Coil set at 50 meters
Coil set at 30 meters

11
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Lock-ins From Alan Fisher’s design review presentation

12
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Initial study on how to minimize the response time from the lock-in and still be able to get a clean signal

13
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006

14
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006

15
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
More Hardware• We have in hand the Lock-ins
• We have found and refurbished 8 power amplifiers (KEPCOs)
• The circuit board with the frequency additions and with the driver circuits for the power amplifiers has been designed, sent out for fabrication, and has just come back from the vendor last week. The mother board and the 8 daughter boards are being stuffed in preparation for checkout.

16
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Software
• We have a team of people from the software group helping to put together a software package for the fast dither
• We will keep the present system intact and build another package for the new hardware. The present system then becomes a backup.
• The present SLAC fast feedback software package can readily accommodate the new fast dither feedback design
• We plan to use a “Newton search” algorithm to decide how far to move. We have a simulator in software to study the algorithm.
• We are keeping an up-to-date flow chart to make sure everyone understands how the feedback works.

17
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Block diagram for the
fast dither
M. SullivanDec. 21, 2005Rev. 7
SAM 66
Algorithm
Gierman, Sullivan, Wienands, Himel,Krauter,Miller, …
PR02
Interface to correctors
Other feedbacks
HERO, LERO, etc.
Bit-Bus
Lock-in signals
X (x,y)Y (x,y)YP (x,y)
Lock-ins
Freq. controlEPICS
Fast Coils
Interface board
24 coil coefficients
Power amplifiers
Lumi signals
SCPCoil coeffs. (24)
Dither amplitudes (3)Dither windows (6)
Default step sizes (3)Newton search boundary (3)
Phase lock thresholds (3)
Minimum lumi signal (1) PR00
DC correctors12 magnets
DACSAMSAM
8
8
24
24
32 24
2432
24
31
Magnet job ampls.Analog status
3 13 336

18
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Algorithm
1
2
Total Lumi
Phase lock signals
2
2
X
Y
YP
X amplitude& sign
Y amplitude& sign
YP amplitude& sign
Lumi threshold for starting feedback
Default step sizes when outside Newton search zone
BitBus commands to DC correctors
If phase lock
amplitude is too
small then do nothing
Boundary definition for stable Newton search zone
3
Amplitude thresholds for lock in signals
1
Inside Newton search zone
compute magnet move
Outside Newton search zone
compute magnet move
Inside or outside newton search
zone
3 3
Sum all three dimensions
Fast dither step sizes
3
Start feedback
6
Fast dither windows
Accuator
Measurement
Computation

19
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Database entries
3 dither sizes
3 phase-lock amplitude thresholds
24 coil coefficients with unit dithers
24 coil coefficients with present dithers
Lumi threshold
3 initial boundary definitions for Newton search (min. Cap sigs)
3 dither windows (6 values)
3 boundary values for Newton search
Algorithm
Slow feedback
SCP
3 initial dither sizes
Default step sizes for DC correctors

20
IR Fast DitherM. Sullivan
MAC ReviewJan. 18-20, 2006
Summary
• We are putting together a new fast dither luminosity feedback system
• The new system should be about 10 times faster than the present system
• This shows great promise for a more accurate and quicker luminosity tune-up of the accelerator.
• The faster feedback should also improve machine stability by getting the beams quickly back into collision when something in the ring shifts the beam orbit(s)