Embed Size (px)
Citation preview
LUẬN VĂN:
Nghiên cứu về giải pháp DCS cho
một xí nghiệp , nhà máy cụ thể
Lời nói đầu
Hiện nay , hệ thống điều khiển phân tán DCS đang được ứng dụng rất rộng rãi trong các
nhà máy công nghiệp . Do đó việc nắm bắt , am hiểu , và làm chủ các hệ thống điều khiển
DCS là yêu cầu cấp thiết đối với các kĩ sư và các sinh viên chuẩn bị ra trường.
Để có thể hiểu một cách sâu sắc thế nào là một hệ thống điều khiển phân tán DCS , chức
năng , cấu trúc , đặc điểm và khả năng áp dụng của nó . Đòi hỏi các sinh viên phải đi tìm
hiểu thực tế tại các nhà máy, nghiên cứu về giải pháp DCS cho một xí nghiệp , nhà máy cụ
thể.
Phần I
Giới thiệu chung về công ty giấy Bãi Bằng
I. Giới thiệu chung về công ty Bãi Bằng :
Công ty giấy bãi bằng là công trình được xây dựng bởi tiền viện trợ không hoàn lại của chính
phủ và nhân dân Thụy Điển ,được xây dựng ở thị trấn Phong Châu , huyện Phù Ninh , tỉnh
Phú Thọ .
Đây là một biểu tượng cao đẹp của tình hữu nghị đã gắn bó hai dân tộc Việt Nam-Thụy Điển
ngay từ những năm nhân dân Việt Nam còn gian khổ đấu tranh chống xâm lược . Một công
trình sản xuất giấy qui mô lớn và hiện đại nhất Việt Nam , được khánh thành năm 1982 , đã và
đang đưa ra thị trường một lượng giấy đáng kể , có chất lượng cao , được người tiêu dùng ưa
chuộng và cũng đã có chân trong thị trường một số nước trong khu vực như Malaysia , Thái
Lan , Singapore , Hồng Công ...
Giấy Bãi Bằng ngay từ khi thiết kế đã chú ý đến việc bảo vệ môi trường và trong quá trình
hoạt động công tác này càng phát triển . Công ty đã tiếp thu công tác quản lý Bắc Âu và đào
tạo được một đội ngũ cán bộ , kỹ sư và công nhân lành nghề đã quản lý và vận hành thành
thạo dây chuyền sản xuất hiện đại . Năm 2004 công ty đã tiến hành nâng cấp và mở rộng sản
xuất lên 100.000 tấn giấy/ năm và 61 000 tấn bột giấy/ năm với chất lượng cạnh tranh quốc tế
và môi trường được cải thiện đạt chuẩn quốc gia Đồng thời công ty đã lập xong nghiên cứu
tiền khả thi cho mở rộng công ty giai đoạn 2 xây dựng một nhà máy sản xuất bột giấy thương
phẩm 250.000 tấn năm hoàn thành trước năm 2007 với chất lượng quốc tế và tiêu chuẩn môi
trường đáp ứng các yêu cầu thế giới.
II . Tổng quan về hệ thống sản xuất của công ty giấy Bãi Bằng :
Toàn bộ nhà máy là một hệ thống khép kín , từ khâu động lực với những lò hơi , tuabin ,…
hoạt động theo công nghệ hiện đại , tự cung cấp đủ điện và hơi và nước cho sản xuất . Bao
gồm :
+ Một nhà máy điện ( power plant ) :
Một lò hơi đốt than 145 tấn / giờ
Một lò hơi thu hồi 36 tấn/giờ
02 tuabins , 01 ngưng tụ , 01 đối áp
02 máy phát điện tổng công suất 28 Mw
+ Xí nghiệp vận tải ( transport enterprise )
Một hệ thống xe chuyên dùng
40 đầu xe tải , tổng trọng tải 300 tấn
12 đoàn xà lan , tổng trọng tải 9600 tấn
Một cảng sông hiện đại
+ Xí nghiệp bảo dưỡng ( maintenance enterprise )
Xí nghiệp cơ khí bảo dưỡng có đủ phương tiện , máy móc và đội ngũ kĩ sư
công nhân lành nghề , có khả năng bảo dưỡng , sửa chữa lớn trong các lĩnh vực cơ khí ,
điện , đo lường và điều khiển
+ Nhà máy hoá chất :
Nhà máy có công suất là 7000 tấn clo hàng năm
24 thùng điện phân , điện cực ti tan
Một hệ thống sản xuất clo lỏng , axit HCl , dịch tẩy Zaven và khí Axetylen
đóng chai cung cấp đủ các loại chất chính cho nhu cầu sản xuất của công ty và bán ra thị
trường
+ Nhà máy sản xuất giấy :
Nhà máy có công suất 100.000 tấn giấy / năm và 61.000 tấn bột giấy /năm
với chất lượng cạnh tranh quốctế với các sản phẩm chính : giấy in ( printing paper ) , giấy
viết ( writing paper ) , giấy photocopy ( photocopy paper ) ,giấy tissue( tissue paper ) ,
các sản phẩm chế biến ( processed products ) , sản phẩm gỗ ( wood products)
Nhà máy bao gồm 3 phân xưởng đảm nhiệm 3 công đoạn sản xuất giấy :
Phân xưởng nguyên liệu : là nơi tập trung gỗ mỡ , gỗ bồ đề , gỗ bạch đàn ,
gỗ thông , keo tai tượng , tre nứa
Vùng nguyên liệu quy hoạch trải rộng trên các tỉnh : phú thọ , vỉnh yên , tuyên quang ,
Hà Giang , Yên Bái , Lào Cai
Phân xưởng sản xuất bột : gồm 3 nồi nấu dung tích 140 tấn / nồi , hệ thống
rửa , sàng chọn khép kín thu hồi 96 – 98% hoá chất . Hệ thống tẩy trắng 3 giai đoạn , có
tiền xử lí bằng oxy
Phân xưởng sản xuất giấy : 02 máy xeo khổ rộng 3,8 m. Một phân xưởng
hoàn thành gia công chế biến tới các loại sản phẩm cuỗi cùng
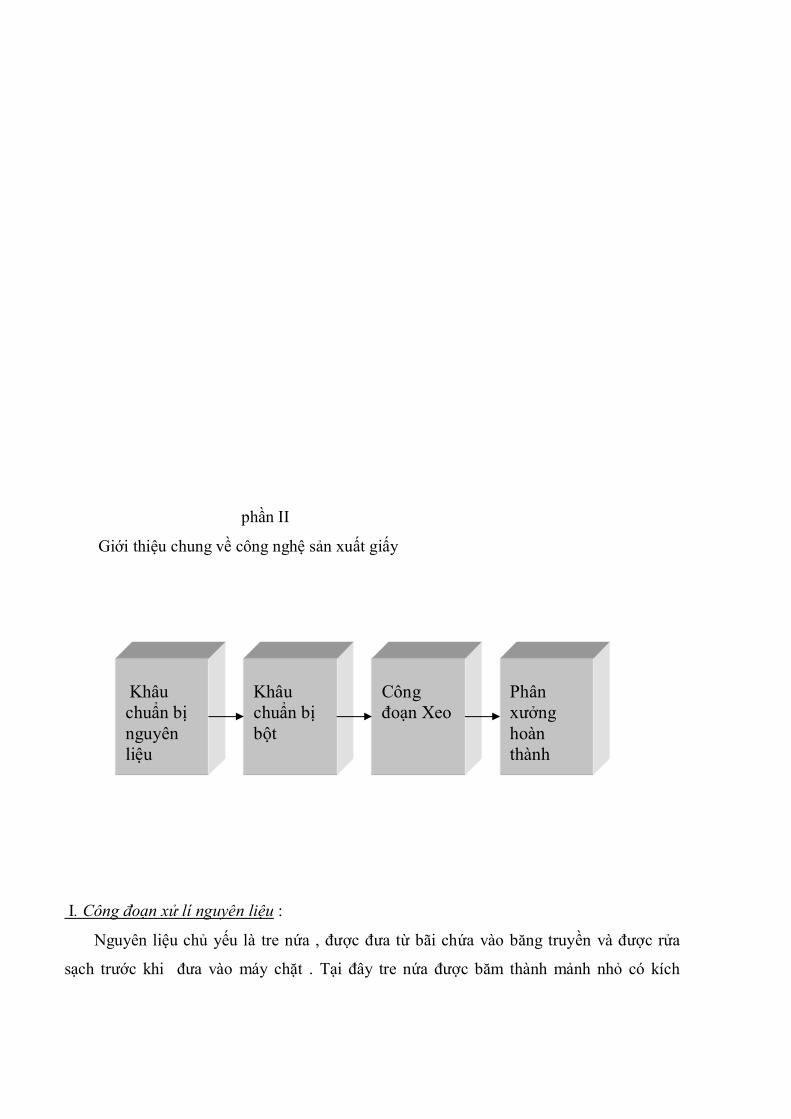
phần II
Giới thiệu chung về công nghệ sản xuất giấy
I. Công đoạn xử lí nguyên liệu :
Nguyên liệu chủ yếu là tre nứa , được đưa từ bãi chứa vào băng truyền và được rửa
sạch trước khi đưa vào máy chặt . Tại đây tre nứa được băm thành mảnh nhỏ có kích
Khâu chuẩn bị nguyên liệu
Khâu chuẩn bị bột
Công đoạn Xeo
Phân xưởng hoàn thành
thước theo tiêu chuẩn là : dài 35mm rộng 10mm , dày 2,5 mm . Các loại máy này được
đưa qua máy sàng chọn Sau đó được đưa vào hệ thống rửa mảnh và qua băng tải tới sân
chứa mảnh Năng suất máy chặt tre nứa là 20 tấn /h .
Gỗ được đưa đến bộ phận bóc vỏ bởi băng tải xích . Gỗ sau khi đã bóc vỏ rồi được rửa
sạch rồi đi vào máy chặt mảnh . Mảnh gỗ sau khi được chặt mảnh có kích thước là : dài 25
– 35mm , rộng 10- 20mm , dày 3-4mm . Mảng gỗ được đưa qua sàng chọn và đưa ra sân
chứa mảnh bằng băng tải Năng suất máy chặt gỗ là 40 tấn / h. Mảnh tre nứa ,gỗ đưavào
nồi nấu bởi hệ thống nầu bằng hơi nóng ở nhiệt độ rất cao thổi vào mảnh
II. công đoạn xử lí bột :
1. Công đoạn nấu bột:
Bột giấy được sản xuất theo phương pháp sunfat có thu hồi hoá chất . Nguyên liệu được
nấu trong 3 thùng , có cấu tạo hình trụ đứng với dung tích mỗi thùng V= 145 m3 .
Thời gian hoàn thành một chu kì nấu là 240 phút kể cả thời gian nạp mảnh . Bột sau
khi được chuyển sang bể có dung tích 400m3 , từ đây bột được chuyển qua máy đánh tơi và
được đưa tới bộ phận rửa .Năng suất nấu bột là 150 tấn /ngáy .
2 Công đoạn rửa sàng :
Tiếp theo là đến công đoạn sàng , bột sau khi được đánh tơi được đưatới 4 máy rửa lọc
chân không . Tại đây bột được rửa sạch , dịch hoá chất thu hồi trong quá trình nấu bột (
dịch đen loãng ) có nồng độ 13% . Loại dịch này được đưa đến hệ thống chưng bốc .
Bột đen đã được rửa sạch , đưa qua hệ thống sàng gồm 2 sàng áp lực 1 sàng thô và 3
giai đoạn lọc cát. Các mấu mắt tre nứa hoặc bột sống bị loại ra khỏi bột được đưa xuống
sáng cô đặc và xuống vít tải thải ra ngoài .
3. Công đoạn tẩy trắng bột :
Công đoạn tẩy trắng bột : bột từ sàng được đưa vào bể chứa bột đen sau đó được đưa
vào tẩy .
Công đoạn tẩy bao gồm 4 giai đoạn : Bột được clo hoá bởi Clo , sau đó được kiềm hoá
để loại bỏ hợp chất màu
Clora lignin ra khỏi bột . Sau khi kiềm hoá bột được tẩy tiếp bởi NaClO để đạt độ trắng
khoảng74 – 78% . Để bột có độ trắng đồng đều theo yêu cầu phải thực hiện theo quy trình
tẩy nghiêm túc duy trì thích hợp các yếu tố nồng độ bột , mức tỉ lệ hoá chất tẩy , nhiệt độ ,
thời gian và độ PH . Bột Sau khi tẩy trắng được đưavào bể chứa để chuẩn bị quá trình sản
xuất giấy
4. Công đoạn Xeo :
Trước khi vào máy xeo giấy , bột được đưa qua hệ thống nghiền còn để làm tăng
diện tích tiếp xúc , tăng khả năng liên kết giữa các thớ sợi với nhau , tạo điều kiện cho
khả năng hình thành tờ giấy tốt hơn . Sau khi nghiền bột được pha trộn với các phụ gia như
: cao lanh , nhựa thông , phèn và một số chất khác tùy theo yêu cầu sản phẩm . Bột đã pha
trộn phụ gia trong bể chứa được đưa qua hệ thống phụ trợ : sàng áp lực , lọc cát và các
thành phần khác có ảnh hưởng đến tờ giấy rồi đưa đến hòm phun bột bắt đầu quá trình sản
xuất giấy.
4.1-Hòm phun bột và sự hình thành tờ giấy
+ Hòm phun bột :
Nhiệm vụ của hòm phun bột là phân phối một lượng bột đồng đều trên lưới và ổn
định với một tốc độ không đổi trên toàn bộ bề ngang của lưới và giữ cho dòng bột xáo trộn
để chống chảy xoáy và phá vỡ sự vón cục của dòng bột đã được hình thành.ở đây bột đã
hình thành tờ giấy ướt có độ khô 18 20 % .
+Bộ phận hình thành :
Việc hình thành tờ giấy được thực hiện giữa 2 bề mặt của lưới đôi . Lưới trong rộng
4350 mm,dài 22.000 mm , lưới ngoài rộng 4350 mm , dài 18000 mm .Ưu thế của loại tạo
hình như vậy hạn chế bề mặt tự do của dòng chảy trên lưới và cho ta khả năng điều khiển
tốt hơn .Trên bộ phận hình thành , nước được thoát ra cả 2 phía chiều dài tạo hình và giấy
sẽ có bề mặt đồng nhất .Sử dụng nguyên tắc tạo tờ giấy giữa một trục hút mở (gọi là trục
tạo hình) một phần được lưới trong và lưới ngoài bao lại có độ căng nên thuận lợi về thời
gian tách nước và độ thấm .
4.2-Bộ phận ép:
ép có nghĩa là tờ giấy được nén bằng cơ học để đạt trên bão hoà . ở phần này nước
cũng tách được càng nhiều ra khỏi tờ giấy càng tốt . Sau công đoạn hình thành , tờ giấy
còn khoảng 80% nước (độ khô = 20 %) . ở công đoạn ép độ khô sẽ tăng lên từ 20 40 % .
Nhiệm vụ chính của bộ phận ép là tách nước ra khỏi tờ giấy , tăng độ bền và độ
nhẵn cuả tờ giấy đồng thời bộ phận ép còn có nhiệm vụ dẫn tờ giấy đến bộ phận sấy .
Bộ phận ép có số lượng cặp ép và cấu trúc khác nhau . Một cặp ép bao gồm giá đỡ
và 2 hoặc 3 lô . Lô dưới thường được lắp trên một ổ đỡ cố định và lô dẫn động . Sự ép xảy
ra ở khoảng giữa lô trong khe ép và tờ giấy được chăn dẫn qua khe ép .
Tờ giấy ướt được chuyển trực tiếp từ lưới tới trục ép chân không được lọc chặn của
tổ ép 1 . Chức năng quan trọng của lưới ép là chống tạo vết trên tờ giấy .Từ tổ ép 1 tờ giấy
được chuyển tới bộ phận ép lưới ở tổ 2 .Tổ 2 gồm một lưới nhựa giữa chăn ép và một trục
ép phía dưới nhằm giảm áp suất thuỷ tĩnh trong tuyến ép .Từ chăn 2 tờ giấy được chuyển
tới tổ ép nhẵn 3 qua một khoảng cách kéo hở . Tổ ép này không có chăn nên không có
nhiệm vụ tách nước mà chỉ có làm cho tổ giấy nhẵn và phẳng hơn .
4.3-Bộ phận sấy:
Khi tờ giấy ra khỏi bộ phận ép , có độ khô khoảng 40 % và nhiệt độ từ 25 30 C .
Trong bộ phận sấy , lượng nước còn lại sẽ được tách ra bằng cách bốc hơi . Sấy là cách vận
chuyển nhiệt và nước , trong đó nhiệt độ được chuyển qua vùng bay hơi và hơi nước bốc
lên đi qua bề mặt của tờ giấy vào luồng khí thông gió . Các biện pháp sấy được sử dụng là
:
- Sấy trực tiếp : tờ giấy tiếp xúc với lô sấy máy.
- Sâý đối lưu : nhiệt độ được cung cấp bởi không khí trong một chụp xung quanh lò
sấy.
- Sấy tự do : sấy trong khoảng không có sức căng hoặc giữa các lô sấy . ở giai đoạn
này , tờ giấy được sấy khô tới 94% . Sau đó ,t ờ giấy đi qua bộ phận ép gia nhựa(ép keo) .
ở đây , nước cùng hoá chất được tờ giấy hấp thụ và lượng nước này được làm bay hơi ở bộ
phận sấy thứ 2 (bộ phận sấy nhựa).
- Bộ phận sấy bao gồm 34 lô sấy (24 lô ở bộ phận sấy chính và 10 lô ở bộ phận sấy
nhựa) . Giấy đã sấy khô được làm nguội trên 2 lô làm lạnh .Tất cả các lô đều có đường
kính là 1500 mm , chiều dài của giấy có thay đổi trong quá trình sấy. Sau các lô ép tờ giấy
được căng ra . Trong suốt quá trình nó được gia nhiệt ở cả 2 quá trình sấy chính và sấy
nhựa (ép keo) . Điều đó thường gây ra sự cố của tờ giấy . Để khắc phục những sự cố và
những biến đổi của tờ giấy , các lô được bố trí thành các nhóm dẫn động khác nhau .Trong
đó , tất cả các lô trong một nhóm có cùng tốc độ . Sự chênh lệch tốc độ giữa các nhóm dẫn
động sẽ được hiệu chỉnh theo độ kéo căng và sự cố cuả tờ giấy.
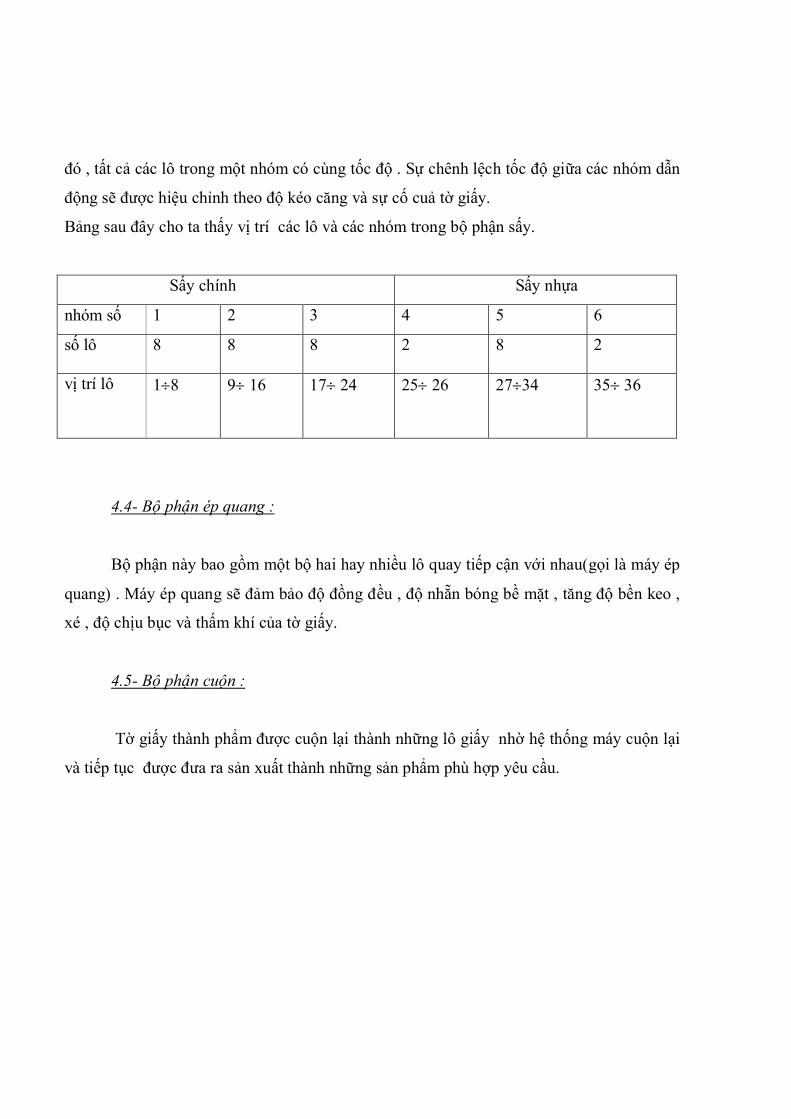
Bảng sau đây cho ta thấy vị trí các lô và các nhóm trong bộ phận sấy.
Sấy chính Sấy nhựa
nhóm số 1 2 3 4 5 6
số lô 8 8 8 2 8 2
vị trí lô 18 9 16 17 24 25 26 2734 35 36
4.4- Bộ phận ép quang :
Bộ phận này bao gồm một bộ hai hay nhiều lô quay tiếp cận với nhau(gọi là máy ép
quang) . Máy ép quang sẽ đảm bảo độ đồng đều , độ nhẵn bóng bề mặt , tăng độ bền keo ,
xé , độ chịu bục và thấm khí của tờ giấy.
4.5- Bộ phận cuộn :
Tờ giấy thành phẩm được cuộn lại thành những lô giấy nhờ hệ thống máy cuộn lại
và tiếp tục được đưa ra sản xuất thành những sản phẩm phù hợp yêu cầu.
phần III
Giới thiệu chung về hệ thống dây chuyền sản xuất trong phân xưởng Xeo 2 :
Bản vẽ kĩ thuật :
Từ bản vẽ kĩ thuật ta thấy : Bột tre nứa được xử lí xong ở khâu bột được đưa đến
bể Bamboo pulp chest 1 , bể này có dung tích 70 m3 , ta điều khiển việc pha trộn dung
dịch bột này với dung dịch bột ngoại , nước trắng để đảm bảo nồng độ bột ở trong bể là 5%
. Sau đó dung dịch bột trong bể sẽ được dẫn ra pha trộn với nước và đưa tới 6 máy nghiền
thô để làm nhỏ kích thước của hạt bột . Tiếp theo chúng được dẫn tới bể Bampoo pulp
chest 2 , dung tích của bể là 50 m3 , việc pha trộn trước đó phải đảm bảo nồng độ của dung
dịch ở trong bể này là 4% . Tiếp đó dung dịch trong bể này được dẫn tới bể pha trộn hỗn
hợp Blending chest, bể này có dung tích 50 m3 .
Tương tự như thế , bột gỗ cứng sau khi đước xử lí ở khâu bột được đưa đến bể
Harđwood pulp chest 1 , bể này có dung tích 70 m3 , ở đây ta phải đảm bảo việc pha trộn
với dung dịch bột ngoại và nước trắng sao cho nồng độ bột trong bể là 5% . Sau đó dung
dịch trong bể được dẫn ra và trộn với nước trắng ( white water ) và đưa vào sáu máy
nghiền thô để làm giảm kích thước của hạt bột , sau đó dung dịch này được đưa vào bể
Hardwood pulp chest 2 , bể này có dung tích 50 m3 , ở đây ta phải đảm bảo việc pha trộn
để nồng độ bột trong bể là 4% . Tiếp đó dung dịch trong bể này được dẫn tới bể pha trộn
Blending chest .
Bể Blending chest là nơi pha trộn dung dịch bột giấy tre nứa , dung dịch bột gỗ cứng ,
dung dịch bột giấy đứt được đưa phản hồi về từ bể Broke chest 1 , các phụ gia là clay,
Alum ( nhôm ) , nhựa thông ( Rosin ) . Các dung dịch trên được trộn đều và đảm
bảo sao cho nồng độ dung dịch là 3 % . Dung dịch trong bể này được dẫn ra và pha trộn
với nước và dung dịch bột giấy đứt từ bể Couch pit pulper sao cho nồng độ giảm xuống
còn 2% và đưa vào bể Machine chest , bể này có dung tích 20 m3 . Dung dịch dẫn ra từ bể
này được đưa qua 2 máy nghiền tinh và dẫn tới bể hố lưới ( wire pit ) .
Ơ bể wire pit dung dịch được trộn với nước sạch đã lọc cát và chất phụ gia AKD sao
cho nồng độ dung dịch giảm xuống chỉ còn 0,8 – 1% và dẫn tới các máy làm sạch ( 3 máy
làm sạch nối tiếp nhau ) theo
nguyên lí li tâm . Hạt cát , bụi bẩn có khối lượng lớn hơn hạt bột do đó chìm xuống dưới
và quay trở lại và bị loại bỏ . Còn dung dịch bột được trộn tiếp với nước và hoá chất phụ
gia là CaCO3 và chất tăng trăng và đưa tới các máy làm sạch ( hai máy ) theo nguyên lí
sàng áp lực ( pressure screens ) các hạt bột đủ tiêu chuẩn sẽ lọt xuống đáy sàng các hạt sợi
dài không đủ tiêu chuẩn sẽ chuyển động lên trên và được đưa trở lại bể hố lưới wire pit .
Dung dich bột đủ tiêu chuẩn sẽ được pha trộn thêm phụ gia BENTONITE trước khi
dẫn tới hòm phun bột tổng , ở đây bột sẽ được phun lên lưới đôi để định hình tờ giấy , sau
lưới đôi giấy sẽ được ép sơ bộ trên lưới để làm giảm % độ ẩm của tờ giấy ,sau đó tờ giấy
sẽ được dẫn qua các lô sấy khô gồm có 6 lô , đây là các lô sấy khô bằng hơi nóng ở áp suất
cao , khoảng 0.3 Mpa .
Như vậy khi đi qua các lô sấy độ ẩm của tờ giấy sẽ giảm rất nhiều và làm tăng độ bền
củatờ giấy . Tiếp theo để tăng độ bền kéo và độ bền xé của tờ giấy người ta sẽ cho tờ giấy
đi qua hệ thống ép keo bằng hồ tinh bột lên bề mặt tờ giấy , sau đó tờ giấy được đưa đi qua
hệ thống làm lạnh để làm giảm nhiệt độ của nó ,và cho sang hệ thống ép quang để gia tăng
độ bóng bề mặt , cuối cùng tờ giấy được đưa vào hệ thống cuộn và nâng suất để tạo thành
sản phẩm chuyển sang phân xưởng hoàn thành .
Để tận dụng dung dịch bột rơi vãi , giấy đứt tại các hệ thống lưới , cuộn , các lô sấy , ép
keo và ép quang ta có hai bể thu hồi là bể Couch pit pulper và bể Dry end pulper chúng
được gọi chung là các thùng đánh bột . Bể Couch pit pulper có dung tích 17 m3 nó dung để
chứa dung dịch bột từ các đầu lưới và lô ép , lô cuộn rơi xuống và dung dich bột đưa tới
từ bể Dry end pulper , bể này dung tích 30m3 và đặt ở khu vực các lô làm lạnh , ép quang ,
lô cuộn để chứa giấy bị đứt , rách ,hỏng và đánh tơi nó ra trước khi đưa sang bể Couch pit
Pulper .
Dung dịch bột có nồng độ rất loãng từ bể Couch pit pulper được đưa tới bể Broke chest
2 ở đây nó được trộn với dung dịch bột hoàn thành , dung dịch bột từ bể Broke chest 2 của
máy Xeo một và dung dịch phản hồi từ bể Broke chest 1 . Ta trộn đều dung dịch trong bể
Broke chest 2 trước khi đưa vào máy cô đặc dung dịch bột giấy đứt (Broke thickener )
dung dịch bột có nồng độ bột cao chảy sang bể Broke chest 1 .
Mục đích của việc phản hồi từ bể Broke chest 1 sang Broke chest 2 chính là để điều
khiển mức trong bể Broke chest 1 . Vì dung dich bột trong bể Broke chest 1 đã được trộn
hoá chất lên ta đưa nó về bể Blending chest để xử lí từ đầu .
Để có nước sạch cho việc pha trộn dung dịch , nước ấm để rửa các đầulưới ta còn có
các bể white water storage, dung tích 200 m3 , bể white water tank , dung tích 20 m3 , bể
wire shower water tank , dung tích 20 m3 , bể chứa nước ấm warm water tank , dung tích
20m3 và bể Filtratetank có dung tích 20 m3
Để phục vụ cho việc ép gia keo cho bề mặt của tờ giấy , trong phân xưởng Xeo có một
hệ thống tạo dung dịch keo từ hồ tinh bột . Dung dịch hồ tinh bột chuẩn bị được hoà trộn
với dung dịch keo thu hồi từ máy ép gia keo và được đưa tới bể Ch 82 , dung tích 1m 3 .
Trong bể Ch82 dung dich keo được nung nóng nhờ hơi nước nóng ở áp suất cao 0.35 Mpa
, lưu lượng 0.04 Kg / s . Và dung dịch keo này được đưa tới hệ thống máy ép gia keo cho
bể mặt tờ giấy .
Phần IV
Các giải pháp điều khiển đang được ứng dụng trong phân xưởng Xeo :
Trong phân xưởng Xeo hiện nay đang tồn tại hỗn hợp 3 hệ thống điều khiển là DCS
của hãng YOKOGAWA , hệ thống điều khiển chất lượng QCS ( Quality control system )
của hãng ABB và các bộ điều khiển đơn lẻ PLC của các hãng SIEMEMS , và hãng
MITSUBISHI .
I. Hệ thống điều khiển chất lượng QCS :
Về cấu trúc thí hệ thống điều khiển QCS chính là một hệ thống điều khiển phân tán
DCS , tức là nó một hệ thống mà tài nguyên của nó được phân tán tới các lớp trường , cận
trường , các đơn vị của hệ thống được liên kết với nhau qua hệ thống BUS , và hệ thống có
tính chất mở .
Nhưng hệ thống QCS có một điểm khác so với hệ thống điều khiển DCS là về thuật
toán điều khiển . Hệ DCS thì các bộ vi xử lí trong trạm FCS dùng các thuật toán để tính
toán các thông số P,I,D cho bộ điều chỉnh , điểu chỉnh các đối tượng , còn hệ QCS điêu
khiển theo phương thức điều khiển tối ưu , nó gồm 2 vòng điều chỉnh . Vòng điểu khiển
một sẽ dựa vào chênh lệch giữa giá trị đặt SV và giá trị công nghệ MV để từ đó tính toán
tín hiệu out làm điểm đặt cho vòng điều chỉnh 2 .
1. Cấu hình của hệ thống QCS :
Hệ thống QCS của nhà máy có thể coi là một Local control network , sử dụng hệ thống
bus MB300 single , có tốc độ truyền thông 10mb/s để kết nối các trạm OS và MP200/1 .
Toàn bộ hệ thống có địa chỉ Net la 11
ABB phân loại quy mô vật lý về hệ thống mạng điều khiển của mình ra làm 3 loại Local
control network , Control network , Plan network , với tiêu chí về số lượng các trạm tham
gia điều khiển , số lượng các bus có trong hệ thống .
Về tổng thề QCS là 1 network (11) , hai trạm Operator station (OS) , hai trạm Master
piece 200/1 , hai trạm sensor Smart Platform , hai trạm ABB là Smart Weight Profile
Control ( ASPC) , 8 SIO . Ngoài ra còn có các sensor , actuator , terminal … phục vụ cho
mục đích điều khiển của hệ thống .
Các lớp dịch vụ của hệ thống hình thành một chuẩn kiến trúc riêng của hãng ABB có tên
là Master Net . Thực ra Master Net vẫn tuân theo chuẩn OSI đặc tả dịch vụ tử tầng 7 là
tầng ứng dụng cho đến tầng vật lí cuối cùng ( tầng 1) do đó hệ thống có tính mở , có thể
kết nối với các hệ thống khác
2. Chức năng và cấu hình của hai trạm vận hành OS :
2.1 Cấu hình phần cứng :
Hai trạm OS được cấu hình đặc biệt chuyên dùng cho hệ thống . Chúng có địa chỉ mạng
là 11.21 cho hệ thống máy Xeo1 và 11.22 cho hệ thống máy Xeo 2 và có cấu hình là :
CPU loại 68030 của Motorola
RAM : 64 MB
HARDISK : 1GB
BUS : 66 Mhz .
Card mạng : Real time Accelerator PU510 phương pháp thâm nhập mạng
CSMA/CD , giao thức sử dụng connection- oriented transport đây là một giao thức ngắn
gọn tuân theo tiêu chuẩn ISO class 4 .
Card mạng PU510 có khả năng hỗ trợ bus dự phòng , hiện nay vẫn còn dư cổng kết nối
để kết nối lên đường bus MB 300 ta cần dùng một thiết bị kết nối là terminal DSTA
2.2 Phương thức truy nhập MB 300 :
Phương thức truy nhập Master Bus 300 ( MB 300 ) của hệ thống QCS là CSMA/CD (
Carrier Sense Multiple Access with Collision Detection ) . Đây là phương thức truy nhập
Bus đa truy cập , cảm nhận đường truyền để dò xung đột .
Mỗi trạm đều phải tự nghe đường dẫn ( Carrier Sense ) , nếu đường dẫn rỗi ( không có
tín hiệu ) thì mới được phát dữ liệu
Do việc lan truyền tín hiệu cần một thới gian nào đó, nên vẫn có khả năng hai trạm cùng
phát tín hiệu lên đường dẫn . Chính vì vậy , trong khi phát thí mỗi trạm vẫn phải nghe
đường dẫn để so sánh tín hiệu phát đi với tín hiệu nhận được xem có xảy ra xung đột hay
không ( Collision Detection )
Trong trường hợp xảy ra xung đột , mỗi trạm đều phải huỷ bỏ bức điện của mình , chờ
một thời gian ngẫu nhiên và thử gửi lại . Thời gian chờ ngẫu nhiên thường là một bội số
của 2 lần thời gian lan truyền tín hiệu Ts.
Ưu điểm của phương pháp CSMA/CD là tính đơn giản , linh hoạt. Việc ghép thêm hay bỏ
đi một trạm không ảnh hưởng gì đến mạng .Vì vậy nó được sử dụng rộng rãi trong các
mạng Ethernet . Nhược điểm là hiệu suất sử dụng đường truyền thấp , không thích hợp với
các cấp thấp , đòi hỏi trao đổi dữ liệu định kì và thời gian thực
Điều kiện ràng buộc của phương pháp CSMA/ CD là :
l . v < 100.000.000 n
với : n là chiều dài bức điện .
l là chiều dài dây dẫn
v : tốc độ truyền
2.3 Cấu hình phần mềm :
Hệ điều hành cài đặt trên hai máy là HP-UX , đây là hệ điều hành phân tán . Nó có
trách nhiệm cung cấp các dịch vụ như quản lý các USER , các tác vụ chuột , bàn phím …
đồng thời quản lí các tài nguyên của hệ thống như bộ nhớ , thời gian CPU … và cung cấp
một số thư viện cho phần chương trình ứng dụng .
Hệ điều hành khi bị hỏng , chẳng hạn như phần mềm ứng dụng không khởi động được …
hệ thống ở trạng thái treo thì ta cũng tiến hành Back up như đối với phần mềm ứng dụng
nhưng theo các bước tiến hành khác và phần được lưu trữ khác nhau
Phần chương trình ứng dụng trên máy cung cấp các dịch vụ như : giám sát thông tin ,
quản lí quá trình , quản lí thống kê , tìm kiếm liên mạng , quản lí lỗi , … phục vụ cho hệ
thống . Chương trình ứng dụng cung cấp 2 tiện ích quan trọng là Back up và Restore .
Back up được dùng khi hệ thống đang chạy ổn định , khi đó cần Back up để tạo ra một
phiên bản hiện thời chứa vào nơi lưu trữ
Restore được dùng khi hệ thống có lỗi như phần ứng dụng bị mất tác dụng điều khiển ,
một số trang màn hình bị mất , hay một số button , label không kích hoạt được … thì
Restore trở lại từ nơi lưu trữ chép đè lên hệ thống đang bị lỗi .
Trong chương trình ứng dụng có một công cụ được cài đặt sẵn là chương trình AdvaBuild
Display Builder . Nó được dùng để tạo lập các trang màn hình điều khiển , cũng như sửa
chữa , hiệu chỉnh chúng . .. Để có thể sử dụng được công cụ này ta cần phải được phép của
hệ thống thông qua PASSWORD , hay chìa khoá uỷ quyền
2.4 Chức năng của hai trạmvận hành OS :
Hai trạm vận hành này được phân công sử dụng riêng cho 2 máy Xeo , nhưng cũng co
thể chuyển quyền điều khiển sang cho nhau , thông qua việc xác lập chế độ quyền điều
khiển . Điều này là rất cần thiết khi sảy ra sự cố ở một trong 2 trạm , thì trạm kia sẽ thay
thế vận hành ở cả hai máy Xeo.
Phần mềm ứng dụng trong điều khiển sản xuất giấy được chia làm 2 phần như sau :
Điều khiển MD ( Machine Direction ) : chức năng điều khiển tỗc độ máy xeo , bao gồm
đồng bộ hoá các thông số về tốc độ chạy máy , tốc
độ bơm quạt … hỗ trợ Ram speed để nâng cao tính ổn định bền vững trong quá trình công
nghệ
Điều khiển CD ( Cross Direction ) : điều khiển định lượng theo chiều ngang của tờ giấy
3. Chức năng và cấu hình của hai trạm Master piece 200/1
Hai trạm Master piece 200/1 có chức năng là một trạm chủ điều khiển trung tâm ( host )
. Nó thu thập , xử lí dữ liệu và thông tin từ các trạm bên dưới như Smart Platform , Smart
Weight Profiler sau đó đưa ra các tín hiệu điều khiển xuống các trạm này . Đồng thời
Master piece 200/1 cũng truyền dữ liệu về OS và nhận lệnh từ OS . Do đó từ OS ta có thể
điểu khiển trạng thái làm việc của các Smart platform , Smart Weight Profiler thông qua
trạm Master piece.
Mặt khác hệ thống điều khiển QCS cũng là một hệ thống điều khiển duy nhất trong nhà
máy dùng Bus trường , là chuẩn RS232 C . Do đó từ màn hính OS ta có thể thâm nhập rất
sâu vào hệ thống , như từ màn hình OS ta có thể thay đổi chế độ đo , dải đo , nhiệt độ của
các sensors … Đây là điều mà hệ thống DCS của nhà máy không có được ví nó không sử
dụng Bus trường .
Cấu trúc của Master piece 200/1 gồm có các Card DSPC 172 h , Card DSBC 172 ,
Card DSCB 190 , và các Card vào ra là DSAI , DSAO DSDO , DSDI . Các Card vào ra
này đều được thiết kế chế độ tự kiểm tra và kết quả kiểm tra đều được hiển thị thông qua
các đèn trên các Card . Nếu đèn F đỏ Card bị lỗi , và nếu Card có nhiều kênh thì có các đèn
chỉ thị trạng thái cho từng kênh tương ứng .
Card DSPC 172 h : Card này đóng vai trò là bộ xử lí trung tâm của trạm Master piece
200/1 . Card gồm vi xử lí 68020 của Motorola , và bộ nhớ DSMP 175 *2 = 8 MbRam.
Trên Card này cũng có gắn 2 Modul Prom dùng cho việc tạo và sử dụng các trend
QMP260 và QMV800 .
Card DSBC 172 làm chủ tốc độ truyền thông của hệ thống . Chức năng của nó bao gồm
một số chức năng trong đó quan trọng nhất là nắm vai trò giám sát truyền thông trên Bus
mở rộng , đồng thời nó cũng giám sát mức điện áp và chỉ thị các lỗi nghiêm trọng khi phát
hiện được
Master piece 200/1 truyền thông với các lớp duới ( SPF , SWP) thông qua Card truyền
thông DSCS190 . Card này sử dụng giao thức RS232C , tín hiệu số dưới dạng dòng do đó
nó có thể truyền xa tới 1,5km và tốc độ truyền tin đạt 19600 bps , tốc độ hiện thời của hệ
thống đang đặt là 9600 bps . Như vậy mỗi MP200/1 hiện nay ở Bãi Bằng có 2 DSCS 190
phục vụ cho việc truyền thông với SPF và SWP .
4. Chức năng và cấu hình của trạm Smart Weight Profiler ( SWP) :
Trạm Smart Weight Profiler (SWP) : là hệ thống chấp hành đặc biệt trong điều khiển
CD , dùng để điều khiển định lượng trung bình của tờ giấy theo từng điểm xác định và
theo chiều ngang của tờ giấy bằng cách dịch chuyển các Actuators lên những điểm xác
định trên môi phun làm khoảng cách từng điểm trên môi phun thay đổi dẫn đến sự thay
đổi định lượng từng điểm trên tờ giấy .
Cấu tạo SWP bao gồm hệ thống các sensors đo vị trí , các Actuator thực hiện các dịch
chuyển môi phun , các SIO và ASPC có nhiệm vụ thu thấp số liệu về giá trị đo của các
sensors , tình trạng làm việc của các Actuator , các điều kiện làm việc như áp suất khí cấp ,
mức điện áp … Đồng thời nhận lệnh điều khiển từ cấp cao hơn . Chức năng của ASPC
dùng cho SWP cũng giống như dùng cho SPF . Tuy nhiên việc dữ liệu mà nó nhận và gửi
đi và các đơn vị lớp dưới mà nó quản lí thì khác nhau do đó phần chương trình mà nó làm
việc cũng khác với SPF . Các thao tác Back up và Restore cũng sử dụng thông qua tiện ích
GOZON trên EWS .
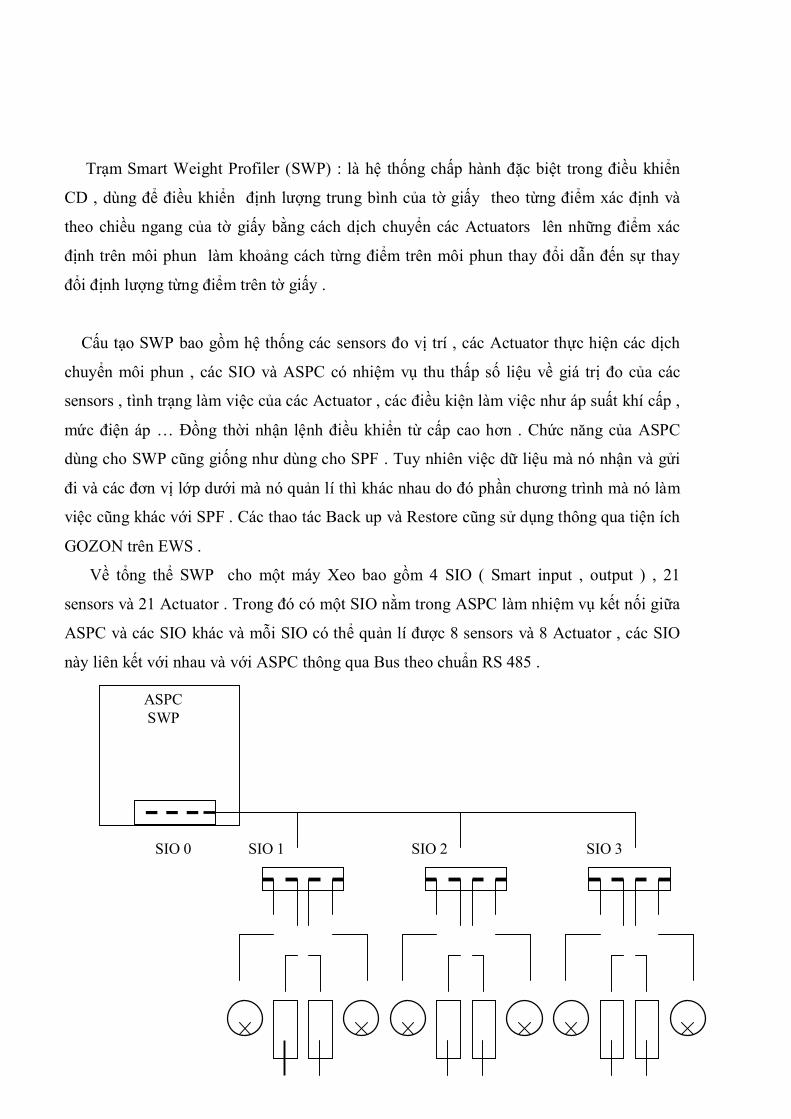
Về tổng thể SWP cho một máy Xeo bao gồm 4 SIO ( Smart input , output ) , 21
sensors và 21 Actuator . Trong đó có một SIO nằm trong ASPC làm nhiệm vụ kết nối giữa
ASPC và các SIO khác và mỗi SIO có thể quản lí được 8 sensors và 8 Actuator , các SIO
này liên kết với nhau và với ASPC thông qua Bus theo chuẩn RS 485 .
+
ASPC SWP
SIO 0 SIO 1 SIO 2 SIO 3
5. Chức năng và cấu hình của trạm kĩ thuật EWS :
Trạm kĩ thuật EWS( Engineer Work Station ) : Chức năng của EWS là một PC được sử
dụng để giám sát , điều khiển , xử lí các tình trạng làm việc của hệ thống . EWS quản lí
SPF và SWP của cả hai máy xeo . Khi khởi động EWS trình Autoexec.bat của hệ thống sẽ
khởi động chương trình DSQview cho phép ta vào phiên làm việc trực tiếp với 1 trong các
trạm mà nó quản lí l.
Yêu cầu về cấu hình của PC là tốc độ CPU từ 100 MHZ trở lên , ổ đĩa 250 MB , RAM
8 MB , có gắn Card hostes của hãng COMTROL , cáp tương thích nối với bộ đa trạm
MAU .
Phần mềm : hệ điều hành Windows 3.1 , Health report , QMM
Công cụ phần mềm Health report có 2 chức năng chính đó là :
Giám sát tình trạng làm việc của hệ thống , các sensors , Actuators . Giám sát điều kiện
làm việc cho các trạm SPF , SWP như mức điện áp , áp suất cấp , nhiệt độ , aircolum ….
Làm công cụ để cài đặt , gỡ rối cho các phần mềm chương trình cần thiết cung cấp cho
các trạm , đồng thời có thể áp đặt các chế độ chạy máy của các trạm .
Ngoài ra phần mềm Health report còn tạo ra các báo cáo , thu thập được trong tình trạng
làm việc bình thường của hệ thống , để từ đó làm các căn cứ so sánh khi cần gỡ rối hệ
thống .
6 . Đặc trưng điều khiển của hệ thống QCS :
Hệ thống QCS thực hiện 2 phương thức điều khiển là : điều khiển phản hồi (
FeedBack) và điều khiển đoán trước ( FeedForword ) . Nó được phân ra làm 2 mức điều
khiển .
Mức 1 ( level 1 ) là mức slave , với các đầu vào là các cổng vào số , cổng vào tương tự
. Đầu ra của nó cũng là các cổng ra số , cổng ra tương tự . Điểm đặt cho mức điều khiển
này có thể cập nhật từ bàn phím ( nếu ta chọn chế độ Auto ) hoặc nó lấy điểm đặt tử các
tín hiệu đặt ở lớp 2 tương ứng ( khi ta chọn chế độ E1) bao gồm các vòng điều khiển lưu
lượng bột F21 , áp suất hơi , lưu lượng CaCO3 . Các tham số điều khiển cần cài đặt cho
mức một là Gain , Ti , Td , Tf .
Mức 2 ( level2 ) là mức Master với đầu vào thu thập được từ các sensors thông qua cơ
cấu SPF , từ đó nó xử lí và tính toán tín hiệu ra làm điểm đặt cho mức một , tương ứng với
các chức năng tương điều khiển tương ứng , và điểm đặt cho SWP . Mức 2 có các trang
tuning chứa rất nhiều tham số khác nhau . Đòi hỏi người quản trị hệ thống phải có nhiều
kinh nghiệm mới nên thâm nhập sâu.
7. Nhiệm vụ điều khiển của hệ thống QCS :
Chất lượng của tờ giấy bao gồm có tính chất vật lý và tính chất hoá lý , trong đó tính
chất vật lý bao gồm độ bền kéo , độ bền xé, độ dày , định lượng …v .v.. Còn tính chất hoá
lý bao gồm độ tro , độ trắng , độ ẩm , độ bóng ..v.v ..
Nhưng hệ thống điều khiển QCS của phân xưởng chỉ quan tâm điều khiển 4 tính chất
Độ tro ( Ash ) là % CaCO3 trong tờ giấy việc pha trộn CaCO3 chính là làm tăng lợi nhuận
sản xuất , độ dày ( caliper ) , định lượng g/ m2 ( Basic weight ) và độ ẩm ( Moisture ) là
% H2O trong tờ giấy .
Để thực hiện việc đo và thu thập số liệu về 4 thông số quan trọng trên hệ thống QCS có
một cơ cấu gọi là Smart Plat Form ( SPF) , SPF có nhiệm vụ thu thập số liệu về tình trạng
vật lý của tờ giấy một cách liên tục , gia công tín hiệu thu thập được theo một chuẩn khuôn
dạng dữ liệu định trước và truyền về MP200/1 , đồng thời nó cũng nhận tín hiệu điều khiển
trạng thái làm việc từ lớp cao hơn .
SPF bao gồm một GARATE , được bố trí theo chiều cắt ngang của hướng giấy chạy , nó
bao gồm 4 SENSORS , mỗi SENSORS đảm nhận đo một thông số là : định lượng , độ ẩm
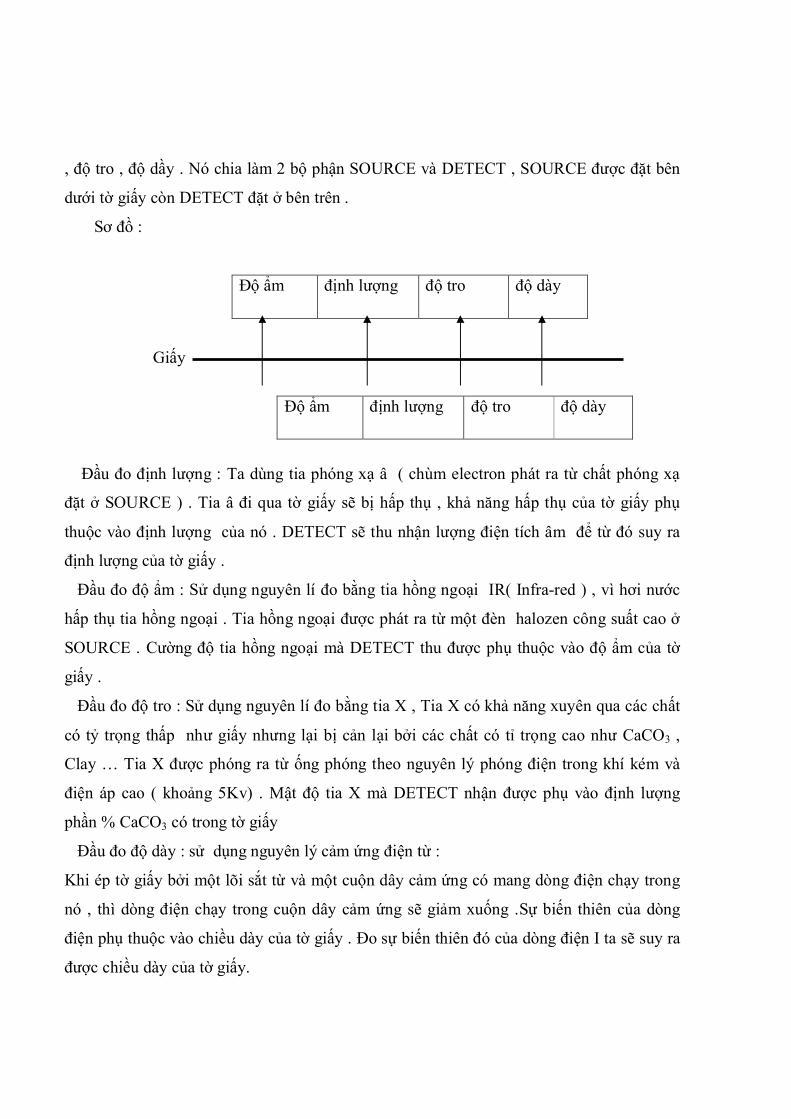
, độ tro , độ dầy . Nó chia làm 2 bộ phận SOURCE và DETECT , SOURCE được đặt bên
dưới tờ giấy còn DETECT đặt ở bên trên .
Sơ đồ :
Độ ẩm định lượng độ tro độ dày
Giấy
Đầu đo định lượng : Ta dùng tia phóng xạ â ( chùm electron phát ra từ chất phóng xạ
đặt ở SOURCE ) . Tia â đi qua tờ giấy sẽ bị hấp thụ , khả năng hấp thụ của tờ giấy phụ
thuộc vào định lượng của nó . DETECT sẽ thu nhận lượng điện tích âm để từ đó suy ra
định lượng của tờ giấy .
Đầu đo độ ẩm : Sử dụng nguyên lí đo bằng tia hồng ngoại IR( Infra-red ) , vì hơi nước
hấp thụ tia hồng ngoại . Tia hồng ngoại được phát ra từ một đèn halozen công suất cao ở
SOURCE . Cường độ tia hồng ngoại mà DETECT thu được phụ thuộc vào độ ẩm của tờ
giấy .
Đầu đo độ tro : Sử dụng nguyên lí đo bằng tia X , Tia X có khả năng xuyên qua các chất
có tỷ trọng thấp như giấy nhưng lại bị cản lại bởi các chất có tỉ trọng cao như CaCO3 ,
Clay … Tia X được phóng ra từ ống phóng theo nguyên lý phóng điện trong khí kém và
điện áp cao ( khoảng 5Kv) . Mật độ tia X mà DETECT nhận được phụ vào định lượng
phần % CaCO3 có trong tờ giấy
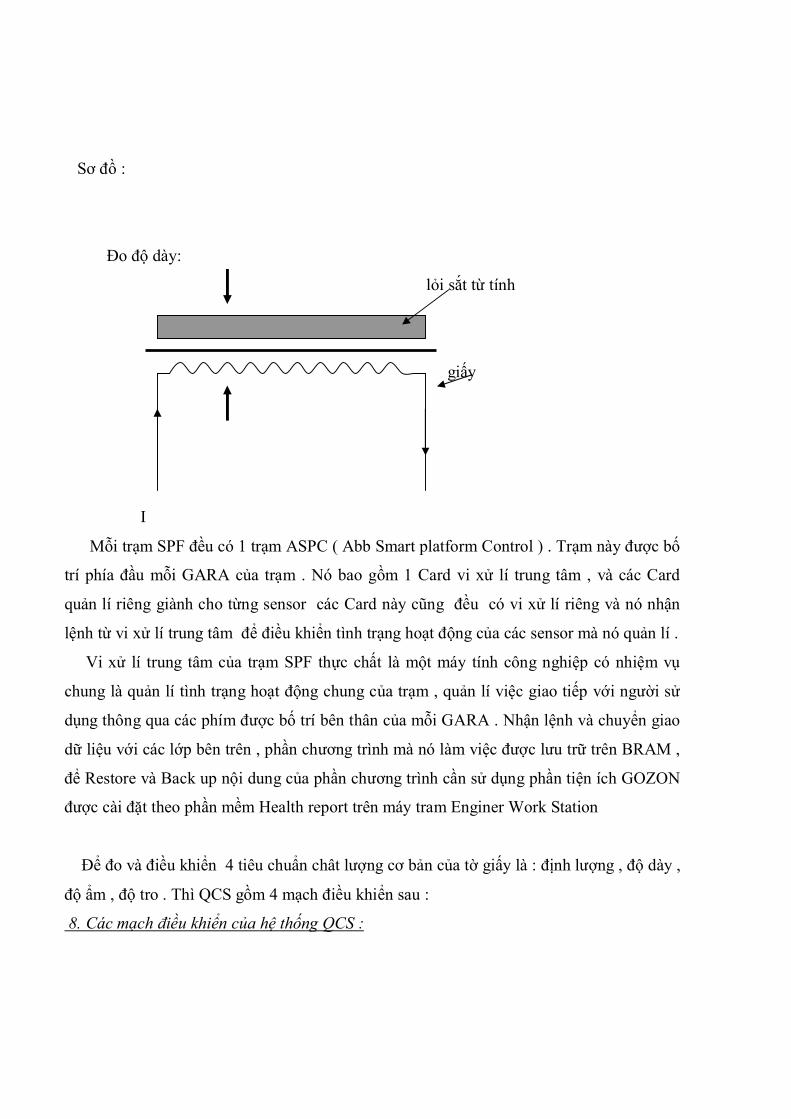
Đầu đo độ dày : sử dụng nguyên lý cảm ứng điện từ :
Khi ép tờ giấy bởi một lõi sắt từ và một cuộn dây cảm ứng có mang dòng điện chạy trong
nó , thì dòng điện chạy trong cuộn dây cảm ứng sẽ giảm xuống .Sự biến thiên của dòng
điện phụ thuộc vào chiều dày của tờ giấy . Đo sự biến thiên đó của dòng điện I ta sẽ suy ra
được chiều dày của tờ giấy.
Độ ẩm định lượng độ tro độ dày
Sơ đồ :
Đo độ dày:
lỏi sắt từ tính
giấy
I
Mỗi trạm SPF đều có 1 trạm ASPC ( Abb Smart platform Control ) . Trạm này được bố
trí phía đầu mỗi GARA của trạm . Nó bao gồm 1 Card vi xử lí trung tâm , và các Card
quản lí riêng giành cho từng sensor các Card này cũng đều có vi xử lí riêng và nó nhận
lệnh từ vi xử lí trung tâm để điều khiển tình trạng hoạt động của các sensor mà nó quản lí .
Vi xử lí trung tâm của trạm SPF thực chất là một máy tính công nghiệp có nhiệm vụ
chung là quản lí tình trạng hoạt động chung của trạm , quản lí việc giao tiếp với người sử
dụng thông qua các phím được bố trí bên thân của mỗi GARA . Nhận lệnh và chuyển giao
dữ liệu với các lớp bên trên , phần chương trình mà nó làm việc được lưu trữ trên BRAM ,
để Restore và Back up nội dung của phần chương trình cần sử dụng phần tiện ích GOZON
được cài đặt theo phần mềm Health report trên máy tram Enginer Work Station
Để đo và điều khiển 4 tiêu chuẩn chât lượng cơ bản của tờ giấy là : định lượng , độ dày ,
độ ẩm , độ tro . Thì QCS gồm 4 mạch điều khiển sau :
8. Các mạch điều khiển của hệ thống QCS :
Để đo và điều khiển 4 tiêu chuẩn chât lượng cơ bản của tờ giấy là : định lượng , độ dày ,
độ ẩm , độ tro . Thì QCS gồm 4 mạch điều khiển sau :
Mạch điều khiển F21 làm nhiệm vụ điêu khiển định lượng của tờ giấy , nó sẽ dựa vào
tín hiệu đo thu nhận được từ đầu đo định lượng để từ đó tính toán điểm đặt cho mạch P33
để điều khiển Hòm phun bột tổng , phun bột lên lưới đôi . Để điều khiển sự phun bột từ
Hòm phun bột tổng lên lưới đôi , ta cần điều khiển áp suất của hòm phun bột tổng , như
vậy ở đây người ta người ta bố trí mạch điều khiển áp suât P33 ( PRCA) , mạch náy sẽ thu
nhận tín hiệu đo từ sensor đo áp suất , sensor này có nhiệm vụ đo áp suất trong đường ống
dẫn dung dịch bột tới hòm phun bột tổng . Sau đó P33 có trách nhiệm điều khiển sao cho
áp suất đó có giá trị bằng điểm đặt từ F21.
Để điều khiển độ tro trong tờ giấy , trong QCS có một mạch điều khiển lưu lượng F (
FCRI) . Nó sẽ dựa vào độ tro của tờ giấy thông qua đầu đo độ tro để từ đó điều khiển lưu
lượng trong đường ống chứa dung dịch CaCO3 và chất tăng trắng vào pha trộn với dung
dịch bột tại bể Wire pit .
Việc điều khiển độ dày của tờ giấy sẽ do cơ cấu SWP của QCS đảm nhiệm , SWP gồm
các sensor đo vị trí và các Actuator thực hiện việc dịch chuyển các môi phun . Dựa vào tín
hiệu đo độ dày của đầu đo độ dày bố trí ở SPF , SWP sẽ điều khiển sao cho Actuator thực
hiện việc dịch chuyển các môi phun sao cho thích hợp
Để điều khiển độ ẩm của tờ giấy ,thì QCS đảm nhiệm việc điều khiển các lô sấy 4 , 5 và
6 của máy Xeo 1 và các lô sấy 5 và 6 của máy Xeo 2. Giấy được sấy khô bởi khí nóng ở
áp suất cao đi trong các lô . Nhiệt độ trong các lô sấy từ 75 – 150 Ċ và áp suất hơi đi vào
đầu các lô sấy khoảng 0.3 Mpa . Như vậy dựa vào độ ẩm của tờ giấy thu nhận được từ đầu
đo độ ẩm ở SPF , thì QCS sẽ tính toán và điều khiển áp suất hơi trong các lô sấy sao cho
thích hợp .
Để tạo điều kiện cho việc điều khiển và giám sát các lô sấy , ở đây người ta bố trí các
đầu đo các đại lượng là : áp suất hơi , nhiệt độ của lô sấy , chênh áp ở đầu vào và đầu ra
của các lô sấy ,lưu lượng hơi . Việc đo lưu lượng hơi ,và nhiệt độ lô sấy được hiển thị tại
chỗ trên các panel , phục vụ cho việc giám sát, nó không có tác dụng điều khiển . Còn các
tín hiệu đo áp suất hơi và chênh áp là nhữngtín hiệu có tác dụng điều khiển .
Ta phải điểu khiển sự chênh áp giữa đầu và cuối lô là nhằm để cho hơi luôn được truyền
đi theo một chiều định trước , hơi hay dung dịch chỉ có thể chuyển động được khi có sự
chênh lệch áp suất.
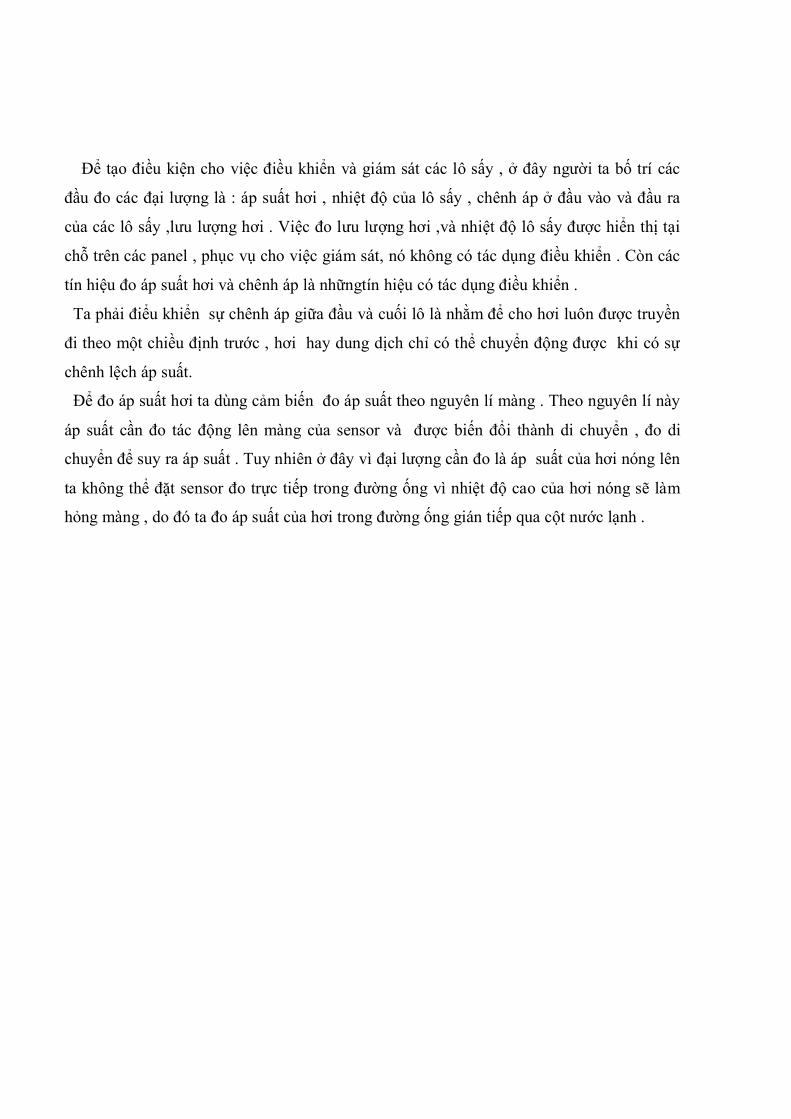
Để đo áp suất hơi ta dùng cảm biến đo áp suất theo nguyên lí màng . Theo nguyên lí này
áp suất cần đo tác động lên màng của sensor và được biến đổi thành di chuyển , đo di
chuyển để suy ra áp suất . Tuy nhiên ở đây vì đại lượng cần đo là áp suất của hơi nóng lên
ta không thể đặt sensor đo trực tiếp trong đường ống vì nhiệt độ cao của hơi nóng sẽ làm
hỏng màng , do đó ta đo áp suất của hơi trong đường ống gián tiếp qua cột nước lạnh .
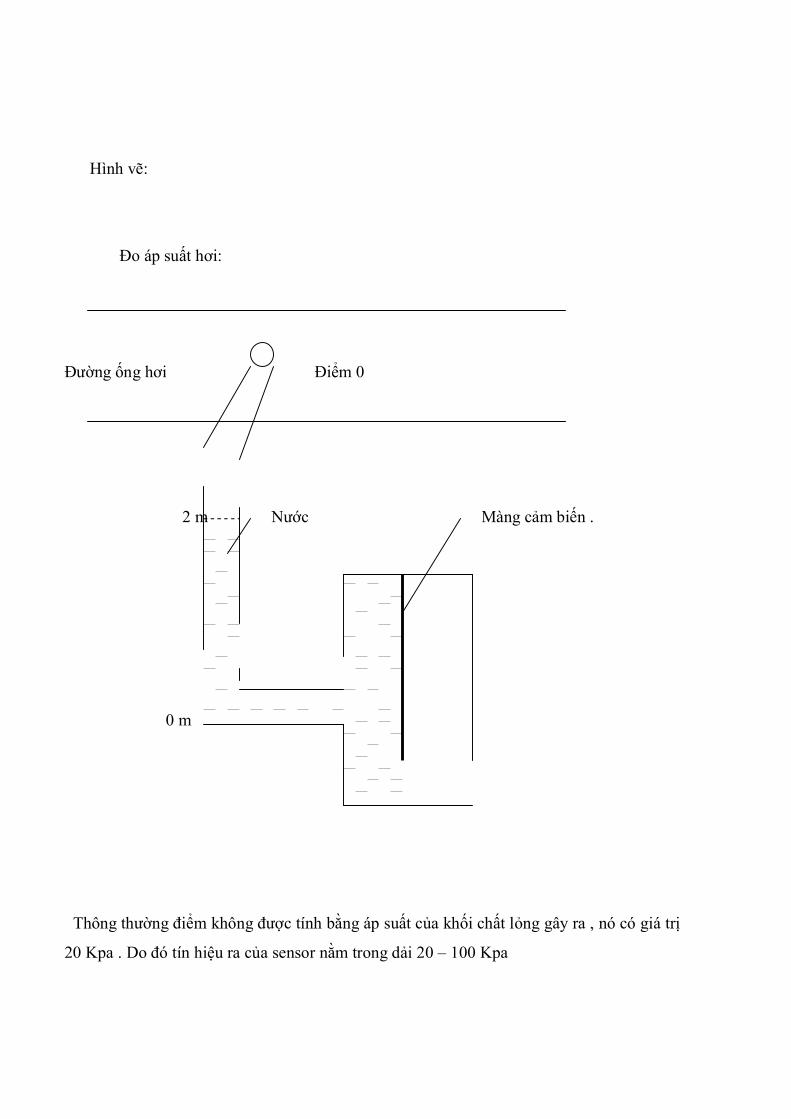
Hình vẽ:
Đo áp suất hơi:
Đường ống hơi Điểm 0
2 m Nước Màng cảm biến .
0 m
Thông thường điểm không được tính bằng áp suất của khối chất lỏng gây ra , nó có giá trị
20 Kpa . Do đó tín hiệu ra của sensor nằm trong dải 20 – 100 Kpa
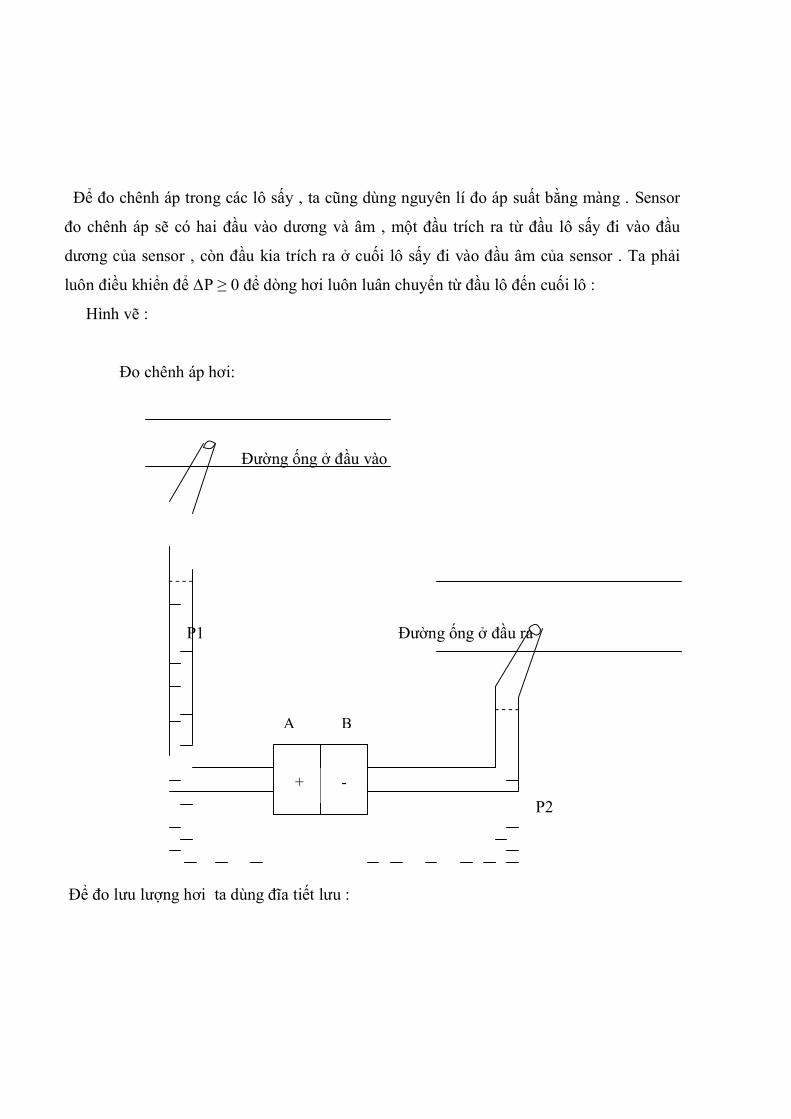
Để đo chênh áp trong các lô sấy , ta cũng dùng nguyên lí đo áp suất bằng màng . Sensor
đo chênh áp sẽ có hai đầu vào dương và âm , một đầu trích ra từ đầu lô sấy đi vào đầu
dương của sensor , còn đầu kia trích ra ở cuối lô sấy đi vào đầu âm của sensor . Ta phải
luôn điều khiển để ∆P ≥ 0 để dòng hơi luôn luân chuyển từ đầu lô đến cuối lô :
Hình vẽ :
Đo chênh áp hơi:
Đường ống ở đầu vào
P1 Đường ống ở đầu ra
P2
Để đo lưu lượng hơi ta dùng đĩa tiết lưu :
+ -
A B
Để đo nhiệt độ hơi ta dùng cảm biến Pt100 , là nhiệt kế nhiệt điện trở được chế tạo bằng
Platin . Khi nhiệt độ là 0 Ċ điện trở của nhiệt điện trở là 100 Ù , khi nhiệt độ là 100 Ċ
điện trở của nhiệt điện trở là 138,5 Ċ . Ta coi sự thay đổi của điện trở theo nhiệt độ là xấp
xỉ tuyến tính.
II. Các bộ điều khiển PLC :
Chúng được sản xuất bởi các hãng SIEMEMS là dòng S7-200 và hãng MISHUBISHI
Các bộ PLC đảm nhiệm việc điều khiển các tổ sấy 1, 2 ,3 và 4 của máy Xeo 1 và các tổ
sấy 1,2, 3 của máy Xeo2 , chúng cũng điều khiển sự chênh áp ở 6 lô sấy . Nhiệm vụ của
các bộ PLC này là giữ cho áp suất hơi trong các lô sấy ,cũng như sự chênh áp luôn ổn định
ở một giải giá trị cho phép , như giữ cho áp suất hơi ở giá trị 0.3 Mpa .
Các bộ PLC được đặt tại chỗ trong các tủ điều khiển tại hiện trường và được kết nối
với màn hình giao diện trên các Panel , cho phép người vận hành giám sát và điêu khiển
thay đổi các thông số tại chỗ . Chúng cũng được kết nối tới tủ điều khiển FCS của hệ thống
DCS của phân xưởng để người vận hành tại trạm HIS cũng có thể giám sát trạng thái hoạt
động của các lô sấy từ màn hình giao diện OS .
Nhược điểm của các bộ điều khiển PLC là khả năng quản lí số lượng các mạch điều
khiển và các điểm đo là hạn chế , mặt khác bộ CPU của PLC có tốc độ không cao , chúng
làm việc theo chu trình quét lên khả năng đáp ứng thời gian thực không cao khi có một
ngắt tác động yêu câu điều khiển . Trong tương lai phân xưởng cần cải tiến để thay thế các
bộ điều khiển PLC bằng DCS .
Phần V
Giải pháp điều khiển DCS cho phân xưởng xeo
I. Khái niệm chung về hệ điều khiển phân tán DCS
Distributed Control System, hệ điều khiển phân tán – DCS là hệ điều khiển mà các
chức năng điều khiển được phân bố trên toàn bộ hệ thống thay vỡ được xử lý tập chung tại
một trạm chung tõm .
Một hệ DCS điển hỡnh bao gồm cỏc trạm điều khiển có chức năng hoàn toàn độc lập
và các trạm điều hành theo dừi và sử lý dữ liệu trong cỏc trạm điều khiển, cung cấp các
giao diện đồ hoạ và cho phép người vận hành có thể thực hiện các thay đổi một cách dễ
dàng và thuận tiện.
DCS là một hệ thống tích hợp với một hệ cơ sở dữ liệu rộng lớn. Không giống như
với các hệ thống dựa trên PLC, ta không thể sử dụng các bộ điều khiển khác nhau và các
trạm điều hành từ các nhà cung cấp khác nhau vỡ DCS là một hệ thống hoàn thiện và việc
truyền thông, trao đổi dữ liệu giữa các bộ phận của hệ là một thể thống nhất.
Hệ DCS được ứng dụng trong các hệ thống điều khiển quá trỡnh như các nhà máy
hoá chất, nhiệt điện, khai khoáng, giấy… DCS được phát triển từ các bộ điều chỉnh tương
tự. Khả năng xử lý dữ liệu tương tự và các trỡnh tự phức tạp và tối ưu hoá quá trỡnh lạ thế
mạnh của DCS .
Một đặc điểm nổi bật nữa của hệ DCS là việc sử dụng các tagname. Trong các hệ
PLC sủ dụng hệ thống địa chỉ để truy cập dữ liệu cũn DCS lại sử dụng cỏc tagname.
Tagname là một tờn bất kỡ được định nghĩa bởi người sử dụng, được áp dụng cho tất cả
các khối chức năng và các điểm I/O trong trạm điều khiển. Do vậy người vận hành và
theo dừi hệ thống cú thể truy cập tới bất cứ một đối tượng nào trong hệ thống qua các
tagname.
1. Cấu trúc chung của mọi hệ điều khiển phân tán :
Đặc điểm của một cấu trúc điều khiển phân tán là việc phân bố việc xử lý thụng tin cũng
như các chức năng theo chiều rộng cũng như theo chiều sâu kết hợp với việc sử dụng mạng
truyền thông thay cho phương pháp nối dây và bằng điện thông thường. Bên cạnh giải
pháp sử dụng các cụm vào/ra tại chỗ nối và các thiết bị châp hành thông minh, người ta
cũn đưa các bộ điều khiển/xử lý từ xa ( như các bộ điều chỉnh, vi điều khiển ) xuống các vị
trí hiện trường ( Remote I/O cabinet).
Cấu trúc điển hỡnh của một hệ DCS được thể hiện trong hỡnh dưới đây, qua đó có :
I/O : Lớp vào ra gồm các trường vào ra và các PLC .
Control : Lớp điều khiển bao gồm các trạm điều khiển ( ví dụ như FCS - trạm
điều khiển hiện trường )
Operation : Lớp điều hành gồm các trạm điều hành ( ví dụ như HIS - trạm giao
diện người máy)
Management Information : Lớp cơ sở dữ liệu và các trạm quản lý ( vớ dụ như
Exaquantum và PRM – chương trỡnh quản lý tài nguyờn nhà mỏy )
.Lớp I/O
Đầu vào và đầu ra đến các hiện trường được tập trung ở lớp I/O. Các bộ vào ra của
hệ thống được xử lý ở lớp I/O bằng một trong ba cỏch sau :
a. I/O bằng mạch điện trở :
Các I/O dạng tương tự ( như các bộ đo áp suất, van điều chỉnh… ) và dạng số ( relay và
các bộ chuyển mạch) có thể được thực hiện bằng các panel mạch điện tử trực tiếp từ hiện
trường. Panel giao diện I/O có một loạt các card giao diện để đưa vào xử lý tớn hiệu
vào/ra.
b. I/O fiedbus :
Có nhiều dạng fiedbus khác nhau được sử dụng trong hệ thống như Foundation Fieldbus,
Profibus và Hart. Những loại này cho phép các sensor và các cơ cấu chấp hành có thể được
kết nối với giao diện I/O thông qua một mạng tín hiệu số để trao đổi các thông số quá trỡnh
và cỏc thụng số trạng thái thiết bị.
c. Giao tiếp với PLC :
Các PLC có thể được nối với hệ thống DCS bằng các dạng card giao diện truyền thông,
thường là trong panel giao diện I/O hoặc đơn giản bằng cách nối trực tiếp đến mạng điều
khiển thông qua module truyền thông với PLC.
.Lớp điều khiển
Các chức năng điều khiển nằm ở lớp này. Các bộ điều khiển trao đổi thông tin với lớp
I/O: đọc dữ liệu vào, thực hiện các chức năng điều khiển và gửi các tín hiệu ra.Các trạm
điều khiển được hoạt động độc lập với nhau nên nếu xảy ra sự cố một trạm thỡ sẽ khụng
ảnh hưởng tới hoạt động của các trạm khác. Đồng thời, một trạm điều khiển có thể trao đổi
dữ liệu dễ dàng với một trạm khác khi sử dụng phương pháp truyền thông điểm - điểm
trong mạng điều khiển.
.Lớp điều hành
Các trạm điều hành cung cấp môt giao diên đồ hoạ đối với các chức năng và các dữ liệu
trong các bộ điều khiển và thực hiện việc xử lý thông qua các đồ thị, các báo cáo…
.Lớp thụng tin quản lý
Tất cả các thông tin mức độ cao, không cần với việc điều khiển thời gian thực nhưng là
cần thiết đối với việc quản lý quỏ trỡnh lõu dài, được xử lý trong lớp quản lý. Lớp này gồm
ba lớp nhỏ :
Gateway: Đề đọc dữ liệu từ các trạm điều khiển
Database: Cơ sở dữ liệu để dữ và lưu lại dữ liệu từ phân tích trước
Management: Quản lý để xử lý thông tin trong cỏ sở dữ liệu.
a) Gateway:
Trước kia mỗi nhà cung cấp có giao thức truyền thông độc lập cho phép máy chủ truy
cập dữ liệu từ các trạm điều khiển. Hiện nay, Microsoft cùng một số các nhà cung cấp
chính đó phỏt triển một tiêu chuẩn liên lạc gọi là OPC, OPC là OLE cho điều khiển quá
trỡnh và cho phộp mỏy chủ nao cũng cú thể kết nối tới một DCS bất kỡ. OPC cú thể đặt
trong trạm điều khiển hoặc trong một máy tính độc lập.
Ghi chú : OPC (OLE for Process Control) được xây dựng dựa trên ý tưởng ứng dụng
công nghệ COM nhằm đơn giản hoá, chuẩn hoá việc khai thác dữ liệu từ các thiết bị cận
trường và các thiết bị điều khiển, tương tự như việc khai thác một hệ thống dữ liệu thông
thường. OPC định nghĩa thêm một số giao diện cho khai thỏc dữ liệu từ cỏc quỏ trỡnh kỹ
thuật, tạo cơ sở cho việc xây dựng các ứng dụng điều khiển phân tán mà không bị phụ
thuộc vào mạng công nghiệp cụ thể.
b) Lớp cơ sở dữ liệu :
Dữ liệu được đọc từ hệ thống DCS phải được lưu trữ và có một bộ cơ sở dữ liệu –
database package, được thiết kế cho mục đích này. Chúng gồm Exaquantum ( một sản
phẩm của Yokogawa ) và PI ( một sản phẩm độc lập ). Những package này đọc dữ liệu
thông qua cổng OPC và lưu dữ liệu dưới dạng fomat cơ sở dữ liệu chuẩn. Exaquantum
dùng Server SQL của Microsoft tương thích với hầu hết các package quản lý. Những
package này cựng cung cấp cỏc chức năng khác như lưu trư dữ liệu trên đĩa, nén dữ liệu,
báo cáo cơ bản và các chức năng hiển thị.
c) Lớp quản lý :
Có một loạt các package khác nhau cẵn có, cung cấp các thông tin khác nhau cho người
dùng. Nó gồm báo cáo chi tiết, điều khiển khối và công thức, quản lý nguồn mỏy, quản lý
cảnh bỏo, tối ưu hoá máy … Chúng truy cập dữ liệu từ cơ sở dữ liệu lưu nhưng có thể ghi
trực tiếp tới các trạm điều khiển thông qua OPC.
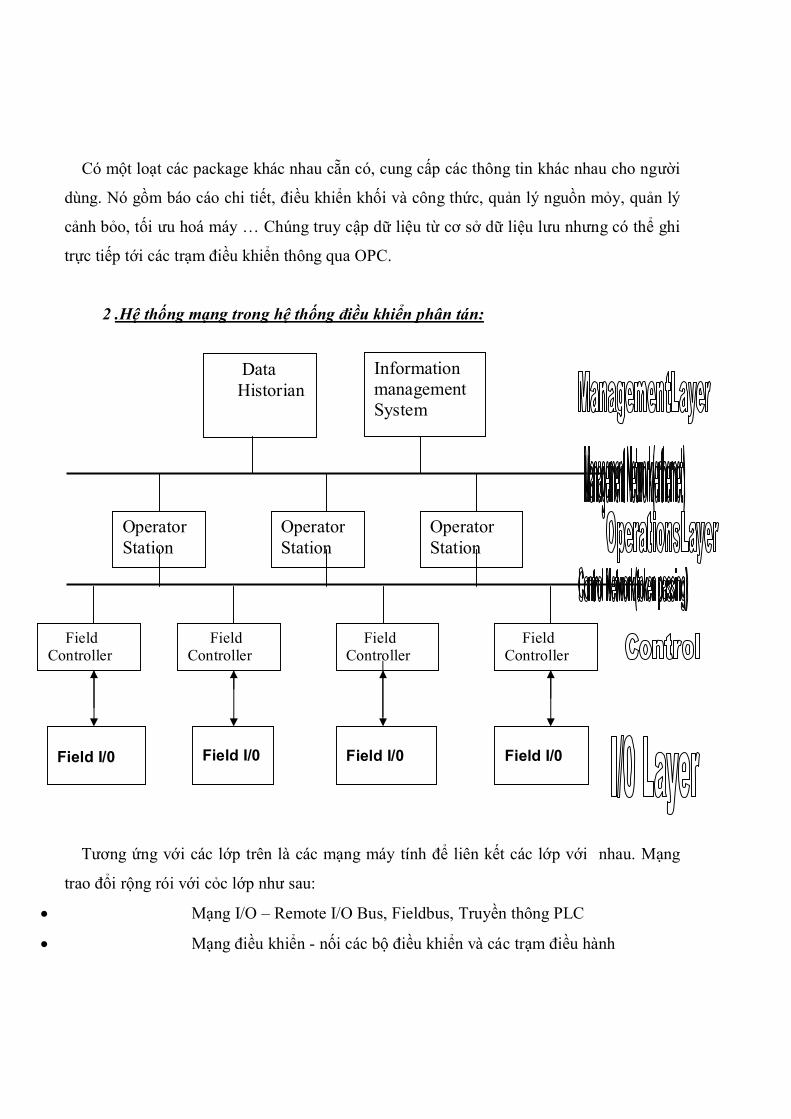
2 .Hệ thống mạng trong hệ thống điều khiển phân tán:
Tương ứng với các lớp trên là các mạng máy tính để liên kết các lớp với nhau. Mạng
trao đổi rộng rói với cỏc lớp như sau:
Mạng I/O – Remote I/O Bus, Fieldbus, Truyền thông PLC
Mạng điều khiển - nối các bộ điều khiển và các trạm điều hành
Data Historian
Information management System
Operator Station
Operator Station
Operator Station
Field Controller
Field Controller
Field Controller
Field Controller
Field I/0 Field I/0
Field I/0
Field I/0
Mạng diện rộng của nhà máy – nơi chứa hầu hết thông tin quản lý
2.1. Các mạng I/O:
Có thể có vài loại mạng I/O, điều đó phụ thuộc vào loại I/O có giao diện với :
Bus I/O từ xa : Một số trạm điều khiển có các card giao diện I/O được tích hợp
trong trạm điều khiển ( ví dụ như Hệ thống Fíches và Porter 6). Tuy nhiên những trạm
khác ( như Yokogawa CS1000/3000 ) có I/O từ xa, tức là các card giao diện I/O tách biệt
khỏi trạm điều khiển và liên lạc với nó qua một bus remote I/O tốc độ cao
Mạng Fieldbus : Một card fieldbus thường đặt trong một khe trên panel I/O và
mỗi loại mạng Fieldbus thường sử dụng một loại card fieldbus riêng biệt.’
Mạng PLC : Như với fieldbus, card truyền thông thường đặt ở một khe I/O trên
panel I/O, sử dụng cổng giao diện nối tiếp, và một số có khả năng hỗ trợ chuẩn đặc biệt.
Chẳng hạn như giao thức truyền thông của Modbus, ABB hay Siemens có thể được nạp
vào card để có thể liên lạc với bất cứ một loại PLC nào trong số đó hoặc một loại PLC
tương thích. Giao thức Modbus là một chuẩn truyền thông công nghiệp, nhiều loại PLC và
các thiết bị khác ( thiết bi phân tích , cân …) có thể liên lạc dựa trên giao thức này.
2.2. Mạng điều khiển:
Các trạm điều khiển và các trạm điều hành được liên lạc với nhau thông qua một
đường truyền dữ liệu tốc độ cao gọi là mạng điều khiển. Đây luôn là mạng quyền của mỗi
hóng và thường sử dụng phương pháp truy nhập chuyển thẻ bài Token passing. Một mạng
điều khiển được ưu tiên để những thông tin nhất định luôn được trao đổi theo mức độ sau :
- Các message cảnh báo: mức ưu tiên cao nhất
- Xử lý thụng tin và cỏc lệnh điều hành: mức trung bỡnh
- Truyền file hay nhập một chương trỡnh vào một trạm điều khiển: mức ưu tiên
thấp nhất.
Ghi chú : Token Passing là một trong nhữn phương pháp truy nhập bus. Token là một bức
điện ngắn không mang dư liệu, có cấu trúc đặc biệt để phân biệt với các bức điện mang
thông tin nguồn, được dùng tương tự như một chỡa khúa. Một trạm được quyền truy nhập
Bus và gửi thông tin đi chỉ trong thời gian nó giữ Token. Sau khi không có nhu gửi thông
tin đi, trạm đang giữ Token phải gửi tới một tràm khác theo một trỡnh tự nhất định. Nếu
trỡnh tự này đúng với trỡnh tự xắp xếp vật lý trong một mạch vũng. Ta dựng khỏi niệm
Token Ring. Cũn nếu trỡnh tự được quy định chỉ có tính logic như ở cấu trúc bus, ta nói tới
Token Bus. Trong mỗi trường hợp đều hỡnh thành một mạch vũng logic. Token Passing
được xếp vào phương pháp kiểm soát phân tán.
2..3. Mạng diện rộng của nhà máy:
Tất cả các thông tin quản lý đều có sẵn trờn mạng thụng tin quản lý hoặc mạng diện
rộng. Đây là mạng Ethernet tiêu chuẩn sẵn có trên các máy PC và được tích hợp với máy
tính.
2. 4.Kiểu mạng
Giao thức mạng thường được sử dụng nhất là Ethernet. Thuật ngữ Ethernet đề cập đến
caỡ gọi là tầng “kết nối” và tầng “vật lý”của mạng. Đó là cáp và phương pháp truyền tải tín
hiệu.
Khi thông tin ví dụ như một file được truyền qua mạng, một giao thức gọi là TCP/IP
sẽ chia file này thành một chuỗi các gói tin với địa chỉ nguồn và địa chỉ đích được gắn vào
mỗi gói. Sau đó nó được chuyển qua Ethernet để mang thông tin qua đường cáp đến máy
tính đích.
Ghi chú: TCP/IP là khái niệm dùng để chỉ cả một bộ giao thức và dịch vụ truyền thông
được công nhận thành chuẩn cho Inthernet. TCP/IP được dùng trong các mạng máy tính
cục bộ và các mạng truyền thông công nghiệp.
Vấn đề đặt ra ở đây là nếu có nhiều máy cùng gửi đi các thông tin trên mạng thỡ điều gỡ
sẽ xảy ra ? Ethernet sử dụng một phương pháp được gọi là hiện xung đột. Nếu các gói
được gửi đi cùng một lúc từ các máy khác nhau, chúng sẽ xung đột với nhau. Khi xung đột
xảy ra, tất cả các máy không được gửi đi bất cứ gỡ trờn mạng trong khi 2 mỏy sẽ được
quyền gửi các gói và khởi động các bộ tính giờ ngẫu nhiên. Máy thứ nhất sẽ nắm quyền
điều khiển của mạng cho đến khi gửi xong các gói.
Một số vấn đề đặt ra khi sử dụng mạng Ethernet:
+ Phương pháp phát hiện xung đột chiếm rất nhiều thời gian. Trung bỡnh thời gian để “
dàn xếp ” việc gửi gói tin gấp 10 lần thời gian gửi nó đi.
+ Khụng cú gỡ đảm bảo rằng gói dữ liệu sẽ được truyền đi trong một thời gian bất kỡ
phụ thuộc vào thời gian giải quyết xung đột.
II . Hệ thống điều khiển phân tán CENTUM CS3000:
A . Giới thiệu:
Từ năm 1997, Yokogawa đó lựa chọn cỏc giải phỏp công nghệ ETS – Enterprise
Technology Sulution cho những khái niệm kinh doanh mới. ETS đảm bảo cho mục đích
cung cấp các giải pháp tối ưu trên quan điểm quản lý doanh nghiệp để thoả món mọi yờu
cầu của khỏch hàng và sự hy vọng vào trỡnh độ phát triển của khoa học kỹ thuật trong
phạm vi từ cấp điều khiển đến cấp quản lý thông tin doanh nghiệp. Là sản phẩm cốt lừi của
hệ thống điều khiển quá trỡnh trong cỏc giải phỏp ETS, Yokogawa đó giới thiệu hệ thống
điều khiển phân tán tích hợp CENTUM CS3000 - hệ thống điều khiển quỏ trỡnh quy mụ
lớn.
Để đáp ứng yêu cầu hệ thống mở, hệ thống sử dụng hệ điều hành Windows NT cho giao
diện người dùng Human Interface. Các chức năng điều khiển của hệ thống được thiết lập
để đảm bảo sự tin cậy của hệ thống.
Sự thay đổi mạnh mẽ trong cơ cấu tổ chức của công nghiệp sản xuất, chế tạo đó thỳc đẩy
nhu cầu cải tiến sản xuất để giảm nhân công, tăng hiệu quả và các yếu tố thuận lợi cho sản
xuất. Mặt khác, để vần hành nhà máy an toàn, càng không thể bỏ qua việc tăng độ tin cậy
và sự an toàn trong sản xuất.
Nhiệm vụ của hệ thống điều khiển quá trỡnh nhằm đơn giản hoá các thao tác điều khiển
quá trỡnh, nhưng khi có sự phát triển mạnh mẽ trong lĩnh vực công nghệ thông tin thỡ yờu
cầu hiện nay đũi hỏi cần cú sự trao đổi thông tin giữa hệ thống quản lý và hệ thống sản
xuất.
Trong xu hướng phát triển chung, hệ thống cấu trúc mở sử dụng các chuẩn phổ thông
biến đó thành yờu cầu khỏ quan trọng. Vào năm 1997, Yokogawa giới thiệu hệ thống điều
khiển phân tán CENTUM CS1000 cho các nhà máy nhỏ và trung bỡnh. CENTUM CS1000
là một hệ thống DCS mở, sử dụng hệ điều hành Window NT. Hiện nay, hệ thống
CENTUM CS3000 được phát triển từ hệ CENTUM CS1000 là một hệ thống điều khiển
quá trỡnh thớch hợp với quy mụ nhà mỏy lớn.
Kế thừa và phát triển các đặc điểm của hệ CENTUM trước đó, hệ thống CENTUM
CS3000 cung cấp cho người dùng những thuận lợi cơ bản sau:
Tăng hiệu quả vận hành sản xuất bằng hệ thống đa cửa sổ theo dừi và khả năng cập
nhật công nghệ mới.
Kết nối thông tin của cấp điều khiển giám sát với hệ thống thông tin thuộc cấp điều
hành.
Phát triển mạnh khả năng tự động hoá và điều khiển.
B. Các đặc trưng của hệ thống CENTUM CS3000
1 . Hiệu quả nâng cao
Bên cạnh ưư điểm và các chức năng điều khiển linh hoạt cao của các hệ thống
CENTUM trước, hệ thống CENTUM CS3000 ngày nay gồm các đặc trưng cơ bản sau:
Được trang bị các chức năng nhúng và liên kết đối tượng OLE cho điều quá
trỡnh bằng trạm OPC ( OLE for Process Control Server)
Hỗ trợ Foudation Fieldbus để tích hợp với mạng sensor và cơ cấu chấp hành.
Cho phép kết nối dễ dàng với các thiết bị điều khiển lập trỡnh PLC.
Cấu trúc dữ liệu mở cho phép sử dụng các công cụ mở rộng để tính toán,
thay đổi khả năng.
2. Khả năng vận hành nâng cao
Sử dụng hệ điều hành Window NT/Window 2000 trong giao diện người máy HIS, hệ
thống CENTUM CS3000 cho phép ứng dụng các ứng Windows phổ biến trong hầu hết các
máy tính PC hiện nay, cho phép sử dụng các phần cứng PC giá thành thấp, thông thường
của các hóng làm cỏc trạm giỏm sỏt vận hành HIS, cho phép dữ liệu có thể trao đổi rộng
rói với cỏc ứng dụng, kể cả cỏc ứng dụng kinh doanh.
3. Nâng cao hiệu quả sản xuất
Thừa kế để đơn giản của công nghệ từ CENTUM CS 1000, hệ thống CENTUM CS3000
có các chức năng công nghệ mở rộng phù hợp với việc thay đổi và mở rộng các công
nghệ.Hệ thống CENTUM CS3000 cho phép tách việc nâng cấp công nghệ với việc vận
hành hệ thống sẵn có,vỡ vậy cú thể thực hiện hiệu quả mà khụng ảnh hưởng đến hiệu quả
sản xuất của nhà máy.
4. Tối ưu hoá sản xuất qua môi trường mở :
Hệ thống DCS có thể sử dụng được để tối ưu hóa sản xuất trên quan điểm sản xuất doanh
nghiệp ERP-Enterprise Resource Planning,hay hệ thống vận hành sản xuất MES-
Manufacturing Excution System,cũng như dễ dàng tạo một hệ thống thông tin quản lý cú
tớnh chiến lược cho doanh nghiệp.Trên quan điểm sản xuất ,hệ thống CENTUM CS3000
có thể được đồng bộ hoá với hệ thống con như hệ thống tự động hoá xí nghiệp FA-Factory
Automation,các thiết bị điều khiển PLC… nhằm nâng cao hiệu quả sản xuất,tính ổn định
và linh hoạt của hệ thống.
C. Cấu hình hệ thống CENTUM CS3000
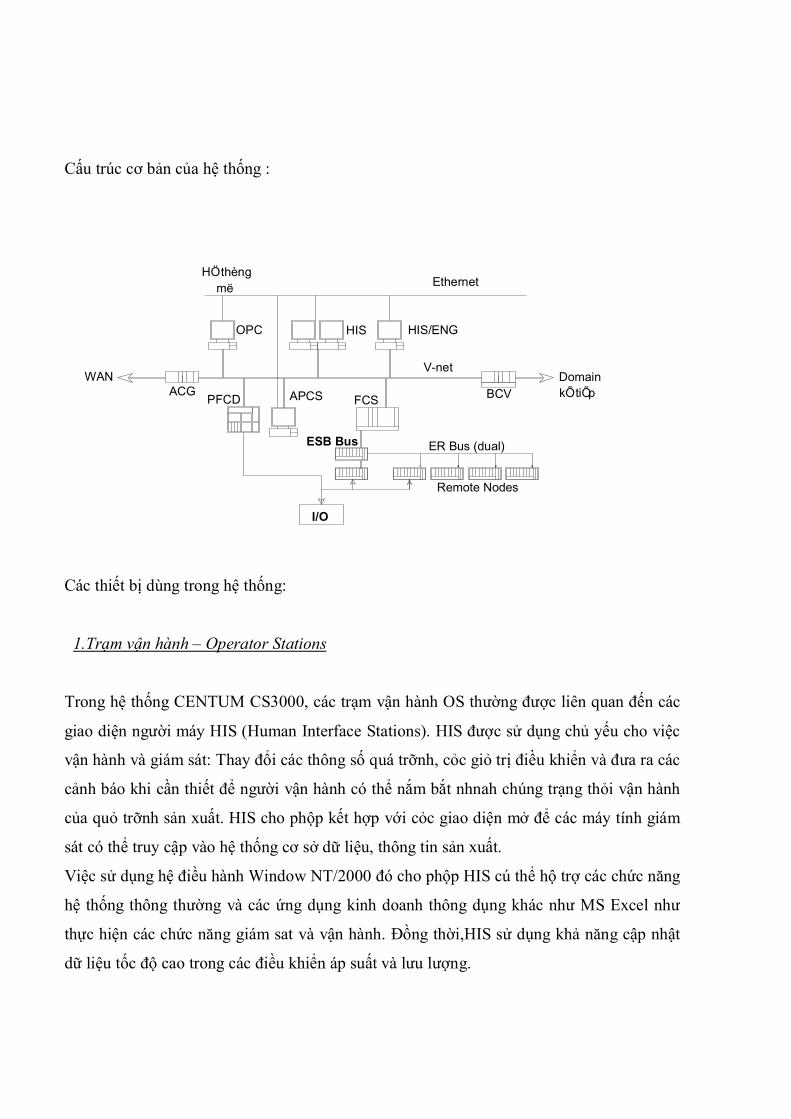
Cấu trúc cơ bản của hệ thống :
Ethernet
HIS/ENGHISOPC
HÖ thèng më
WANACG
PFCD APCS FCS
V-net
BCVDomain kÕ tiÕp
ESB Bus ER Bus (dual)
Remote Nodes
I/O
Các thiết bị dùng trong hệ thống:
1.Trạm vận hành – Operator Stations
Trong hệ thống CENTUM CS3000, các trạm vận hành OS thường được liên quan đến các
giao diện người máy HIS (Human Interface Stations). HIS được sử dụng chủ yếu cho việc
vận hành và giám sát: Thay đổi các thông số quá trỡnh, cỏc giỏ trị điều khiển và đưa ra các
cảnh báo khi cần thiết để người vận hành có thể nắm bắt nhnah chúng trạng thỏi vận hành
của quỏ trỡnh sản xuất. HIS cho phộp kết hợp với cỏc giao diện mở để các máy tính giám
sát có thể truy cập vào hệ thống cơ sở dữ liệu, thông tin sản xuất.
Việc sử dụng hệ điều hành Window NT/2000 đó cho phộp HIS cú thể hộ trợ các chức năng
hệ thống thông thường và các ứng dụng kinh doanh thông dụng khác như MS Excel như
thực hiện các chức năng giám sat và vận hành. Đồng thời,HIS sử dụng khả năng cập nhật
dữ liệu tốc độ cao trong các điều khiển áp suất và lưu lượng.
Có 2 kiểu HIS:
- Console Type HIS: HIS kiểu đứng gồm hai loại
- Desktop Type HIS: HIS kiểu để bàn: thực chất là các máy tính cá nhân chạy
hệ điều hành Windows NT.
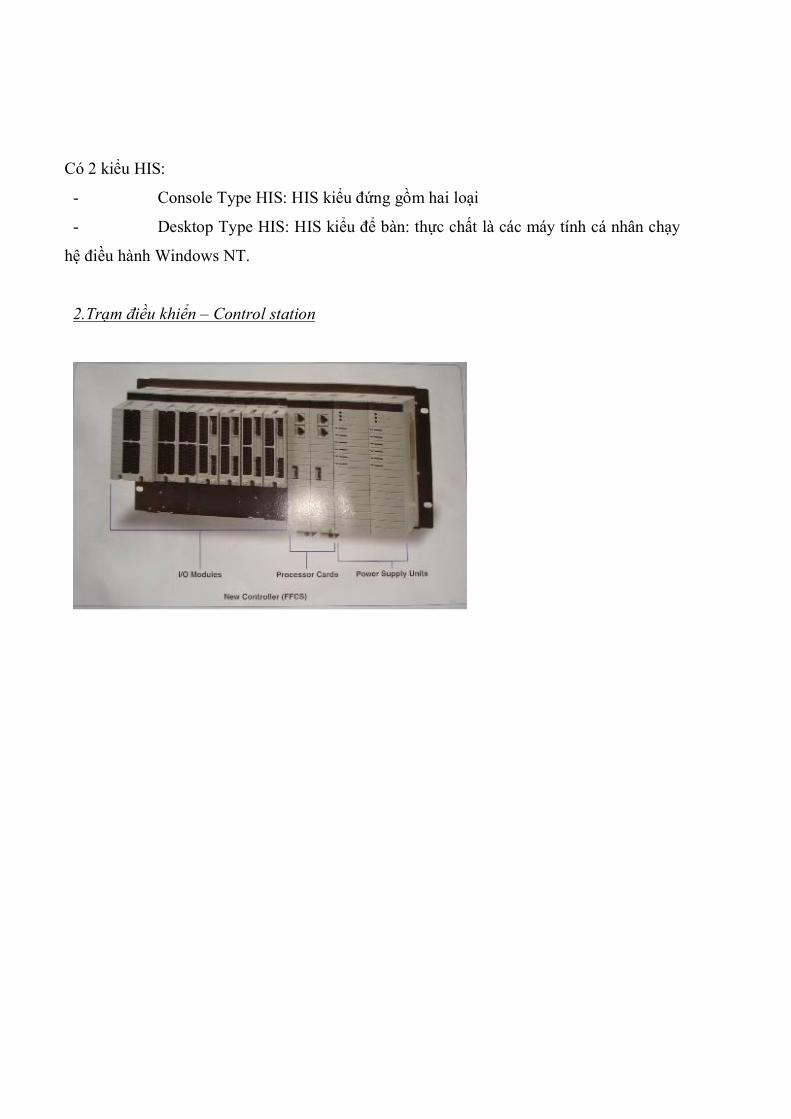
2.Trạm điều khiển – Control station
Các trạm điều khiển trong hệ thống CENTUM CS 3000 được gọi là các trạm điều khiển
trường FCS – File Control Station. Đây là trung tâm của các hệ thống điều khiển và là thiết
bị cần thiết dùng cho việc điều khiển nhà máy liên tục do FCS xử lý các chức năng điều
khiển quá trỡnh liờn tục hay yheo nhúm trong hệ thống CENTUM CS 3000.
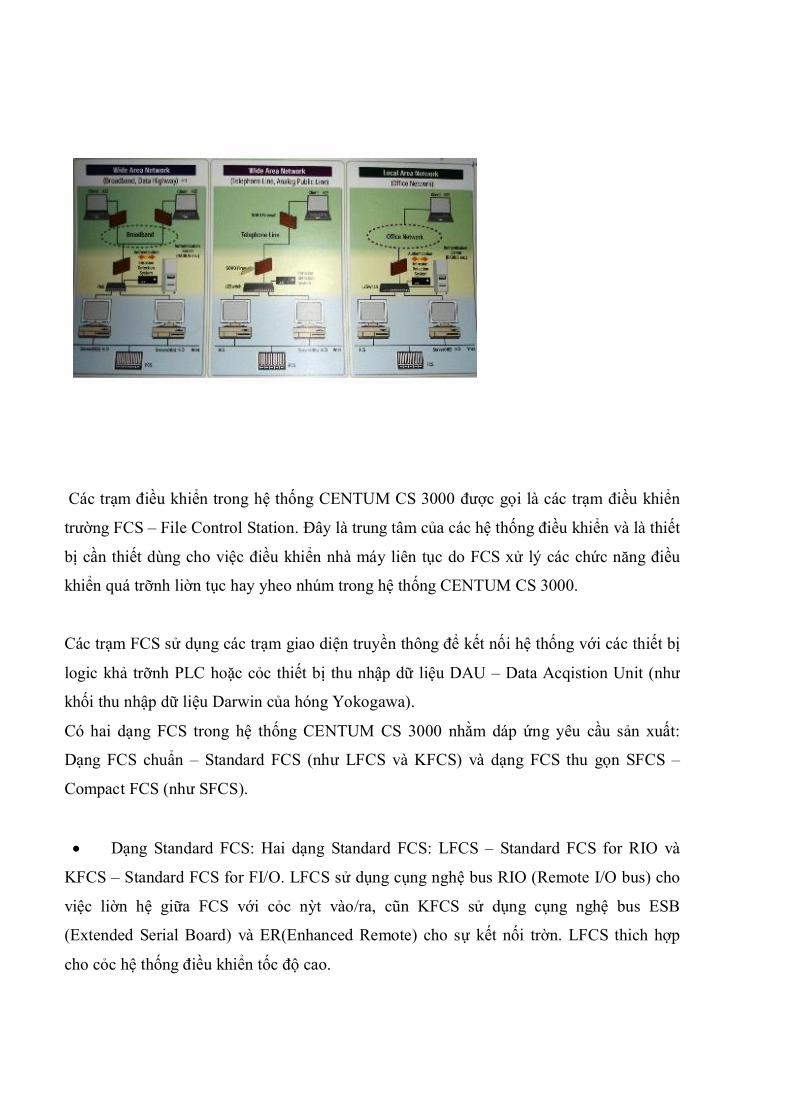
Các trạm FCS sử dụng các trạm giao diện truyền thông để kết nối hệ thống với các thiết bị
logic khả trỡnh PLC hoặc cỏc thiết bị thu nhập dữ liệu DAU – Data Acqistion Unit (như
khối thu nhập dữ liệu Darwin của hóng Yokogawa).
Có hai dạng FCS trong hệ thống CENTUM CS 3000 nhằm dáp ứng yêu cầu sản xuất:
Dạng FCS chuẩn – Standard FCS (như LFCS và KFCS) và dạng FCS thu gọn SFCS –
Compact FCS (như SFCS).
Dạng Standard FCS: Hai dạng Standard FCS: LFCS – Standard FCS for RIO và
KFCS – Standard FCS for FI/O. LFCS sử dụng cụng nghệ bus RIO (Remote I/O bus) cho
việc liờn hệ giữa FCS với cỏc nỳt vào/ra, cũn KFCS sử dụng cụng nghệ bus ESB
(Extended Serial Board) và ER(Enhanced Remote) cho sự kết nối trờn. LFCS thich hợp
cho cỏc hệ thống điều khiển tốc độ cao.
Dạng Compact FCS: Bộ điều khiển SFCS thường được đặt gần các thiết bị hoặc hệ
điều khiển quá trỡnh, và là giải phỏp lý tưởng cho việc liên kết với các hệ thống phụ.
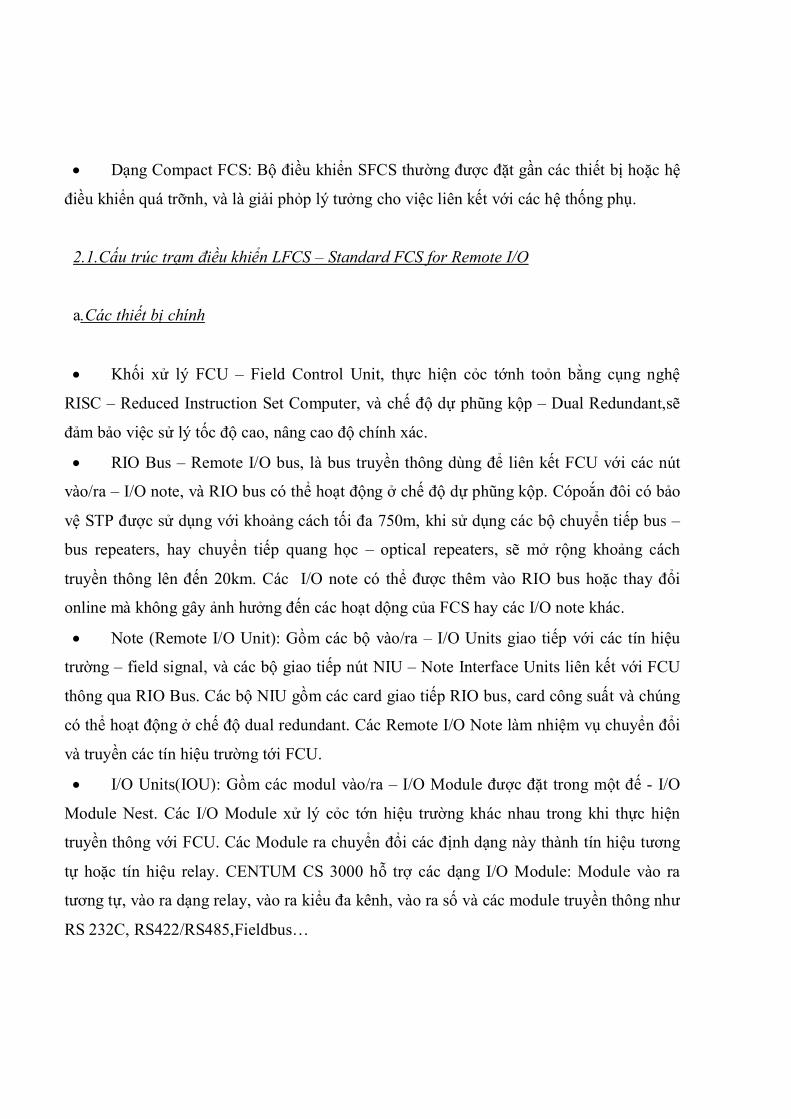
2.1.Cấu trúc trạm điều khiển LFCS – Standard FCS for Remote I/O
a.Các thiết bị chính
Khối xử lý FCU – Field Control Unit, thực hiện cỏc tớnh toỏn bằng cụng nghệ
RISC – Reduced Instruction Set Computer, và chế độ dự phũng kộp – Dual Redundant,sẽ
đảm bảo việc sử lý tốc độ cao, nâng cao độ chính xác.
RIO Bus – Remote I/O bus, là bus truyền thông dùng để liên kết FCU với các nút
vào/ra – I/O note, và RIO bus có thể hoạt động ở chế độ dự phũng kộp. Cópoắn đôi có bảo
vệ STP được sử dụng với khoảng cách tối đa 750m, khi sử dụng các bộ chuyển tiếp bus –
bus repeaters, hay chuyển tiếp quang học – optical repeaters, sẽ mở rộng khoảng cách
truyền thông lên đến 20km. Các I/O note có thể được thêm vào RIO bus hoặc thay đổi
online mà không gây ảnh hưởng đến các hoạt dộng của FCS hay các I/O note khác.
Note (Remote I/O Unit): Gồm các bộ vào/ra – I/O Units giao tiếp với các tín hiệu
trường – field signal, và các bộ giao tiếp nút NIU – Note Interface Units liên kết với FCU
thông qua RIO Bus. Các bộ NIU gồm các card giao tiếp RIO bus, card công suất và chúng
có thể hoạt động ở chế độ dual redundant. Các Remote I/O Note làm nhiệm vụ chuyển đổi
và truyền các tín hiệu trường tới FCU.
I/O Units(IOU): Gồm các modul vào/ra – I/O Module được đặt trong một đế - I/O
Module Nest. Các I/O Module xử lý cỏc tớn hiệu trường khác nhau trong khi thực hiện
truyền thông với FCU. Các Module ra chuyển đổi các định dạng này thành tín hiệu tương
tự hoặc tín hiệu relay. CENTUM CS 3000 hỗ trợ các dạng I/O Module: Module vào ra
tương tự, vào ra dạng relay, vào ra kiểu đa kênh, vào ra số và các module truyền thông như
RS 232C, RS422/RS485,Fieldbus…
b.Lắp đặt các FCS và các I/O Note:
Các FCU và các I/O Note có đặt trong các cabin chuyên dụng hoặc giá đỡ 19’’ thông
thường. Chúng có thể đặt cạnh nhau hoặc riêng lẻ: ta có thể đặt vài I/O Note trong cùng
một cabin hoặc cùng giá đỡ với FCU và đặt các I/O Note ở các giá đỡ khác tại hiện trường.
Mỗi FCU chỉ có thể kết nối tối đa với 8 I/O Note và mỗi NIU có thể nối với tối da 5 I/O
Unit.
c. Chế độ dự phũng kộp – Dual Redundant
Với các LFCS, tất cả các thiết bị đều có thể hoạt động ở chế độ dự phũng kộp. Việc chuyển
đổi giữa hai trạng thái: Hoạt động và dừng ở hai card CPU không cần bất cứ sự gián đoạn
nào trong điều khiển. Có 2 CPU trong mỗi card CPU. Mỗi CPU thực hiện cùng một quá
trỡnh tớnh toỏn và kết quả sẽ được so sánh với nhau qua bộ so sỏnh. Nếu kết quả tớnh toỏn
giống nhau thỡ bản mạch sẽ hoạt động bỡnh thường, kết quả tính toán được gửi tới bộ nhớ
và card giao diện bus. Bộ nhớ chính sử dụng mó đúng sai ECC để thay đổi nhanh chóng
các bít bị sai trong quá trỡnh truyền dữ liệu. Nếu kết quả tính toán không giống nhau, bộ so
sánh sẽ đặt card CPU này bị bất thường và chuyển sang card CPU dự phũng.
Bộ định thời Watch Dog được sử dụng khi phát hiện thấy bất thường trong card CPU hiện
hành thỡ sẽ chuyển trạng thỏi cho 2 card CPU. Bộ dự phũng sẽ thực hiện cựng một quỏ
trỡnh tớnh toỏn tương tự như trong bộ hiện hành, và khi được chuyển sang trạng thái làm
việc thỡ kết quả tớnh sẽ được chuyển tới bộ nhớ và card giao diện bus mà không có sự gián
đoạn trong điều khiển. Nếu một lỗi trong CPU bất thường được phát hiện thỡ bộ nhớ tự
chuẩn đoán sẽ được tiến hành kiểm tra phần cứng CPU. Nếu không có lỗi phần cứng thỡ
lỗi này sẽ được coi là lỗi tức thời và card CPU sẽ được chuyển từ trạng thái bất thường
sang dự phũng.
Vnet và giao diện Vnet phải hoạt động ở chế độ dự phũng kộp. Cỏc card giao diện bus
RIO dự phũng ( RB301) cú thể đặt trong FCU và được sử dụng liên tục. Nếu một sự bất
thường được phát hiện trên một đường bus thỡ đường thư hai sẽ được sử dụng. Bus bất
thường sẽ được kiểm tra định kỳ để xem xét khả năng đưa nó về trạng thái bỡnh thường.
Trong các nút, card giao tiếp nút NIC – Node Interface Card, và nguồn cung cấp của nút
NPS – Node Power Supply, bus module I/O từ NIU tới từng module I/O cũng có thể làm
việc ở chế độ dự phũng.
2.2. Trạm điều khiển KFCS – Standard FCS for Fast IO
Về cơ bản, FCU KFCS không khác nhiều so với FCU LFCS. Điểm khác biệt lớn nhất
giữa hai kiểu Standard FCS này là KFCS sử dụng hệ thống vào ra hai lớp – Tow-layer I/O
System, bằng các bus ESB và ER, cũn cú LFCS chỉ sử dụng RIO bus cho các vào/ra phân
tán. Mỗi FCU có thể kết nối tối đa với 10 FIO Node và tối đa 8 I/O module có thể lắp đặt
tại mỗi IO Node.
ESB bus ( Extended Serial Bacdboard bus) là dạng bus truyền thông được sử dụng để
kết nối FCU với các nút vào ra cục bộ - local node đặt trong cùng dabin với FCU. ESB bus
có thể hoạt động ở chế độ dual redundant và khoảng cách truyền tối đa là 10m với tốc độ
128 Mbps .
R bus (Enhanced Remote bus) là dạng bus truyền thông để kết nối các RIO Node với
FCU thông qua module giao tiếp ER bus tại local node. Bằng việc sử dụng ER bus, các I/O
Node có thể đặt tại cùng cabin với FCU hoặc tại các vị trí từ xa so với cabin của FCS.
Khoảng cách truyền tối đa là 185m nếu sử dụng cáp đồng trục Ethernet10-Base-2 hoặc tối
đa 500m nếu sử dụng cáp đồng trục Ethernet 10- Base-5. Nếu sử dụng các bộ chuyển tiếp
kết hợp bus quang thông thường thỡ cú thể đưa khoảng cách này lên đến 2km.
2.3 . Trạm điều khiển SFCS – Compact Field Control Station
SFCS được phát triển từ hệ thống CENTUM CS1000, phối hợp các chức năng điều
khiển, các I/O Module và các card xử lý, giao tiếp trong một giá đỡ 19” thông thường. Mỗi
SFCS được nối với tối đa 5 I/O Unit.
Tương tự LFCS thỡ cỏc bộ phận của SFCS cũng cú thể hoạt động ở chế độ dự phũng
kép và các card CPU cũng có thề chuyển nhanh chóng từ trạng thái hoạt động sang dừng
mà không gặp sự gián đoạn trong điều khiển. Trong SFCS, mỗi card CPU chỉ có một CPU
và không có bộ so sánh. Các card CPU thực hiện tính toán đồng bộ và mó đúng sai của bộ
nhớ chính được dùng để sửa các bit sai. Khi truy cập vào bộ nhớ CPU không có hiệu lực
thỡ cỏc dữ liệu này sẽ khụng được sử dụng và CPU tương ứng sẽ dừng hoạt động. Nếu các
lỗi xảy ra trong CPU hiện hành thỡ sẽ chuyển nhanh sang trạng thỏi dừng bằng bộ định
thời Watch Dog. Mỗi CPU thực hiện vào/ra qua card giao diện vào/ra quà trỡnh( Process
I/O bus). Cả hai bộ CPU đều kiểm tra khả năng bỡnh thường của bus PIO. Nếu bất thường
được phát hiện thỡ bộ dự phũng sẽ được đưa vào sử dụng.
3.Các máy tính kỹ thuật :
Đây là loại máy với chức năng kỹ thuật để vận hành Centum CS3000. Nó có thể có cùng
cấu trúc như các máy PC chuyên dụng. Bằng cách có các chức năng điều hành và kiểm tra,
xử lý của HIS, trờn một mỏy ENG ta cú thể sư dụng chức năng kiểm tra để tạo ra một môi
trường kỹ thuật hiệu quả và dễ sử dụng.
4.Bus điều khiển :
a. Vnet
Hệ thống bus điều khiển cũng quan trọng như các trạm điều khiển FCS. Hệ thống
CENTUM CS3000 sử dụng bus điều khiển thời gian thực Vnet cho việc liên kết các trạm
FCS, HIS, BCV, CGW… với nhau bằng hai loại cáp chính:
Cáp YCB 141 : nối giữa các trạm HIS với khoảng cách tối đa 185m
Cỏp YCB 111 : nối cỏc trạm cũn lại (FCS,CGW) với khoảng cỏch tối đa 500m
Hai loại cáp trên có thể nối với nhau thông qua bộ chuyển đổi cáp hoặc bộ chuyển đổi bus
Khi mở rộng Vnet, các trạm FCS được phân bố khắp nhà máy có thể được giám sát từ các
trạm HIS trong phũng điều khiển trung tâm. Các bộ chuyển tiếp bus – bus repeater và các
bộ chuyển tiếp cáp quang có thể được sử dụng kết hợp với nhau để mở rộng Vnet tới chiều
dài tối đa 20km.
b. Các thiết bị truyền thông trên bus điều khiển
Hệ thống điều khiển tích hợp CENTUM CS3000 là hệ thống DCS cho các nhà máy quy
mô lớn. Để thực hiện mục đích này, hệ thống CENTUM CS3000 đó sử dụng cỏc thiết bị
truyền thông sau để liên kết với bus điều khiển Vnet :
ACG, CGW: cung cấp một cổng Ethernet cho các máy tính giám sát và hỗ trợ giao thức
TCP/IP, đồng thời được sử dụng để kết nối Vnet với một mạng lớn. BCV-V, BCV-H,
BCV-L : các cổng kết nối Vnet, HF bus HL với bus Vnet của hệ thốngCENTUM CS 3000
để phù hợp với quy mô lớn. Các BCV-H và BCV-L được sử dụng để kết nối các hệ thống
CETUM XL và CENTUM V vào hệ thống CENTUM CS 3000.
5.Mạng thông tin :
Trong hệ thống CENTUM CS3000, mạng thông tin thường sử dụng mạng Ethernet với
mục đích phát triển hệ thống mở, cho phép hệ thống CENTUM CS3000 có thể kết nối với
hệ thống mạng nội bộ Intranet của công ty. Ethernet sẽ kết nối các trạm HIS, ENG và các
hệ thống giám sát với nhau để trao đổi thông tin dữ liệu trong hệ thống CENTUM CS3000.
6. Đặc điểm kỹ thuật của hệ thống:
CENTUM CS3000 là một hệ thống linh hoạt, có thể dụng cho các hệ thống nhỏ cũng như
các hệ thống lớn.
Số đối tượng quản lý tối đa: 100.000 tag
Số trạm tối đa trong hệ thống : 256 trạm
Số vùng điều khiển tối đa: 16 vùng
Số trạm tối đa cho một vùng điều khiển : 64 trạm ( 16 trạm HIS tối đa)
III . Giải pháp DCS đang được áp dụng trong phân xưởng Xeo :
1. Giới thiệu về hệ thống điều khiển DCS của phân xưởng :
Hệ thống điều khiển DCS đang được áp dụng cho nhà máy được cung cấp bởi hãng
YOKOGAWA . Hệ thống bao gồm một hệ thống các điểm đo và thu thập số liệu của các
đại lượng như nồng độ mức , lưu lượng , áp suất , độ nghiền , .... Tín hiệu đo từ sensor
được đưa vào các bộ transmitter để hiển thị tại chỗ và chuẩn hoá thành tín hiệu dòng 4 –
20mA truyền về phòng điều khiển trung tâm. Trong phòng điều khiển trung tâm bao gồm
một trạm FCS , một tủ vào số , một tủ ra số , và 1 tủ vào/ra tương tự . Trạm FCS gồm có 4
CPU và các mạch điều khiển , Card truyền thông . các I/O ... Trạm FCS truyền thông với
các máy tính vận hành tại trạm HIS( gồm 2 máy ) thông qua mạng V- Net, đường cáp
truyền là 10BASE5 . Hai máy của trạm HIS cũng được nối mạng với nhau bởi một cổng
Hub , đường truyền là cáp 10BASE2 , các máy này cũng được nối mạng với các máy in
màu và máy in phun.
2. Chức năng của hệ thồng điều khiển DCS ở phân xưởng :
a. Điều khiển mức dung dịch trong các bể chứa :
BamBoo pulp chest 1 có tagname là : 64-Ch 63
HardWood pulp chest 1 có tagname là : 64 – Ch 64.
HardWood pulp chest 2 có tagname là : 64 – Ch 65
BamBoo pulp chest 2 có tagname là : 64 – Ch 66
Blending chest có tagname là : 64 – Ch 67
Machine chest có tagname là : 64 – Ch 68
White water storage có tagname là : Ch69
Wire pit có tagname là : Ch 70
White water tank có tagname là : Ch 71
Couch pit pulper có tagname là : Ch 73
Wire shower water tank có tagname là Ch 74
Warm water tank có tagname là Ch75.
Broke chest 1 có tagname là : Ch 76
Broke chest 2 có tagname là : Ch 77
Filtrate tank có tagname là : Ch 78
Flotation Save all có tagname là : Ch 79
Dry end Pulper có tagname là : Ch 81 .
b. Điều khiển nồng độ bột của dung dịch dẫn trong các đường ống
Đường ống dẫn dung dịch từ bể BamBoo pulp chest 1 tới bể BamBoo pulp Chest 2.
Đường ống dẫn dung dịch từ bể Hardwood pulp chest 1 tới bể Hardwood pulp Chest 2.
Đường ống dẫn dung dịch từ bể BamBoo chest 2 tới bể Blending chest
Đường ống dẫn dung dịch từ bể Hardwood chest 2 tới bể Blending chest
Đường ống dẫn dung dịch từ bể Broke chest 1 tới bể Blending chest
Đường ống dẫn dung dịch từ bể Blending chest tới bể Machine chest .
c. Điều khiển lưu lượng của dung dịch bột chạy trong các đường ống :
Đường ống dẫn dung dịch từ bể BamBoo chest 2 tới bể Blending chest
Đường ống dẫn dung dịch từ bể Hardwood chest 2 tới bể Blending chest
Đường ống dẫn dung dịch từ bể Broke chest 1 tới bể Blending chest
Đường ống dẫn dung dịch từ bể Machine chest tới bể Wire pit
Đường ống dẫn dung dịch hoá chất AKD tới pha trộn với dung dịch bột tại bể Wire pit
Đường ống dẫn dung dịch hoá chất BENTONITE tới pha trộn với dung dịch bột trước khi
đi vào hòm phun bột tổng .
d. Điều khiển độ nghiền tại các máy nghiền
Điều khiển áp suất trong các đường ống ở các bơm hút chân không và ở một số đương ống
khác trong nhà máy .
Ngoài ra hệ thống DCS còn cung cấp giao diện đồ hoạ tại các máy tính ( 2 máy ) ở trạm
vận hành HIS ( Human Interface System ) , phục vụ cho việc giám sát hoạt động của hệ
thống máy móc . Tại đây ta cũng có thể thay đổi các thông số điều khiển , điểm đặt .
Hai máy tính tại trạm HIS thì chỉ có một máy giữ vai trò chức năng chính , nó có thể điều
khiển . Còn máy kia không có vai trò điều khiển .
3. Hệ thống các điểm đo của DCS :
Để phục vụ cho việc điều khiển của mình hệ thống DCS có một hệ thống các điểm đo để
thu thập số liệu cần thiết cho quá trình điều khiển và giám sát . Chúng được coi là các con
mắt của hệ thống DCS .
Vì chưa đủ điều kiện về kinh tế , máy móc , trình độ vận hành …. Nên công ty giấy Bãi
Bằng chưa đưa vào ứng dụng hệ thống Bus trường ( Field Bus ) cho hệ thống DCS của
phân xưởng Xeo .
Mà ở dưới cấp độ hiện trường hiện nay của hệ thống DCS trong phân xưởng Xeo đang
sử dụng các dây dẫn truyền bằng dòng tương tự , được chuẩn hoá từ 4 – 20 mA. Tín hiệu
đo được thu nhận từ các sensors sẽ được truyền đến các bộ Transmitters , tại đây chúng sẽ
được chuyển đổi thành tín hiệu dòng và chuẩn hoá giá trị từ 4 – 20 mA, và truyền tiếp về
phòng điều khiển . Việc truyền tín hiệu dưới dạng tín hiệu dòng sẽ tránh được ảnh hưởng
của điện trở dây dẫn lên tín hiệu cũng như làm giảm được khả năng gây nhiễu bởi môi
trường xung quanh . Do đó khoảng cách truyền được xa hơn .
Trong phong điều khiển có đặt các tủ FCS , và các tủ vào số ( DI ) 192 tủ ra số ( DO )
193 , tủ vào/ra tương tự ( AI/AO) 191. Như vậy tín hiệu truyền từ các Transmitters sẽ
được đưa tới tủ 191 để nó chuyển đổi thành tín hiệu số dưới dạng áp, trước khi đưa tới các
Card mạng truyền thông của tủ FCS .
Các CPUs ( gồm 4 CPU , trong đó có 2 CPU là để dự phòng ) trong tủ FCS sẽ dựa vào
các tín hiệu đo nhận được từ các sensors để từ đó xử lí tính toán và đưa ra các tín hiệu điều
khiển xuống các cơ cấu chấp hành , cũng như truyền dữ liệu về các máy tính của trạm HIS.
Trên các bộ Transmitters cũng có màn hình hiện thị giá trị tại chỗ về giá trị đo , chế độ
đo , dải đo , nhiệt độ … của các sensors tương ứng để người công nhân có thể giám sát và
thay đổi các thông số đó .
Nguyên tắc truyền tín hiệu dòng là luôn phải khép kín , nhưng trong công nghiệp ta
không tận dụng đất làm dây dẫn thứ hai . Mà thực tế tín hiệu truyền từ Transmitters tới
phòng điều khiển và ngược lại là sử dụng cáp truyền 2 dây . Điều này nhằm mục đích
tránh sự khác nhau về thế điện áp của đất ở nơi phát và nơi thu. Với những cảm biến dùng
đo lưu lượng , áp suất của các đường ống trên cao thì đường cáp truyền từ nó về các I/O sử
dụng đến 3 dây trong đó một dây là để nối đất chung cho nơi phát và nơi thu. Nguồn cấp
cho các sensors là nguồn điện áp 220V .
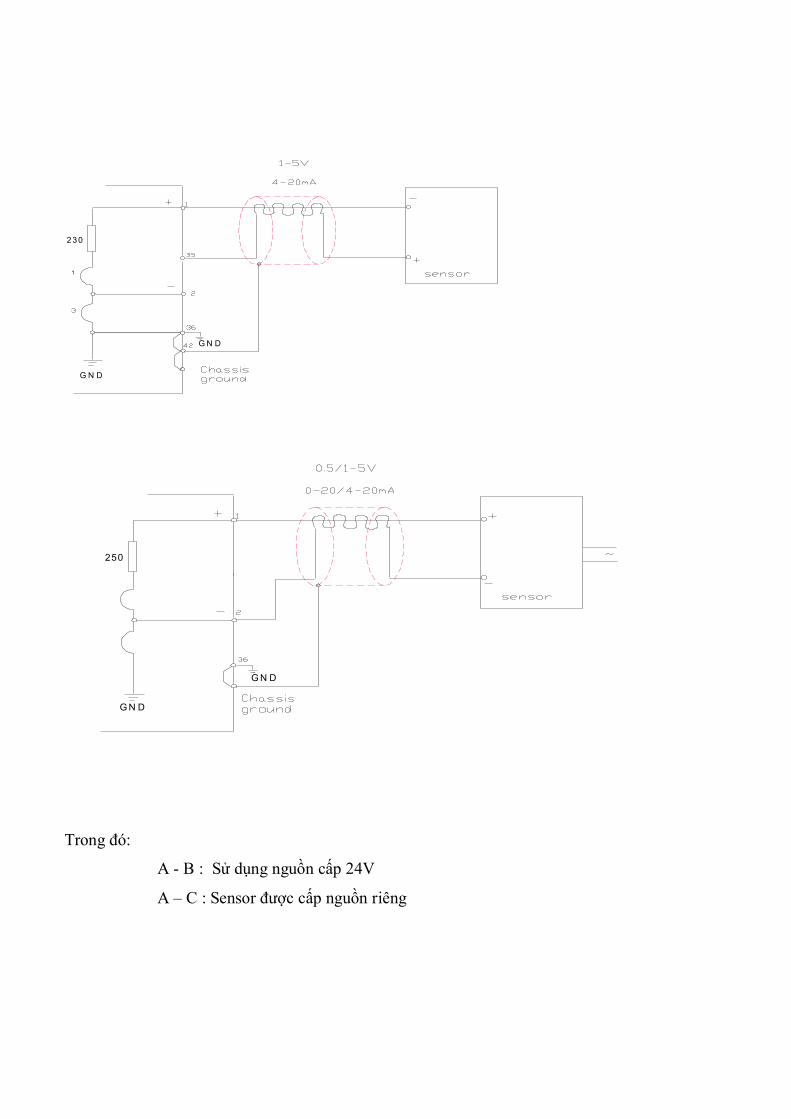
Có 2 dạng sơ đồ cung cấp nguồn cho sensor :
2 3 0
1
G N D
G N D
250
G N D
G N D
Trong đó:
A - B : Sử dụng nguồn cấp 24V
A – C : Sensor được cấp nguồn riêng
Do không sử dụng hệ thống Bus trường cho hệ thống DCS , lên từ màn hình giao diện
của các máy tính tại trạm vận hành HIS , ta không thể can thiệp quá sâu vào hệ thống tức
là ta không thể thay đổi các thông số về chế độ đo , dải đo , nhiệt độ… của các sensors.
Nếu như FCS là bộ não của hệ thống điều khiển DCS , các sensors là các con mắt thì
các van , các bộ tác động , thyristors , động cơ... được coi là tay chân của hệ thống điều
khiển . Thực tế tại nhà máy giấy Bãi Bằng cho ta thấy , để điều khiển các đối tượng như
lưu lượng , nồng độ bột , áp suất , mức trong các bể ... ta thường tác động vào khối chấp
hành của bộ điều chỉnh là các van phần trăm. Cấu tạo của các van này gồm 3 bộ phận đó
là : cơ cấu cảm nhận vị trí , bộ tác động và khố chấp hành.
Các van có thể nhận tín hiệu điều khiển dưới dạng tín hiệu điện 4 – 20 mA hoặc dưới
dạng khí 20 – 100 Kpa . Nguồn cấp cho các van điện là 220 V , còn nguồn cấp cho các van
khí là 600 Kpa . Nếu như cần điều khiển van khí thì tín hiệu điều khiển từ FCS đưa xuống
dưới dạng dòng 4 – 20 mA phải được cho vào bộ chuyển đổi I/P thành tín hiệu áp suất của
khí 20 – 100 Kpa , trước khí đưa vào điều khiển van . Và ngược lại
4. Nguyên lí đo một số đại lượng cơ bản :
4.1 .Các nguyên lí đo nồng độ :
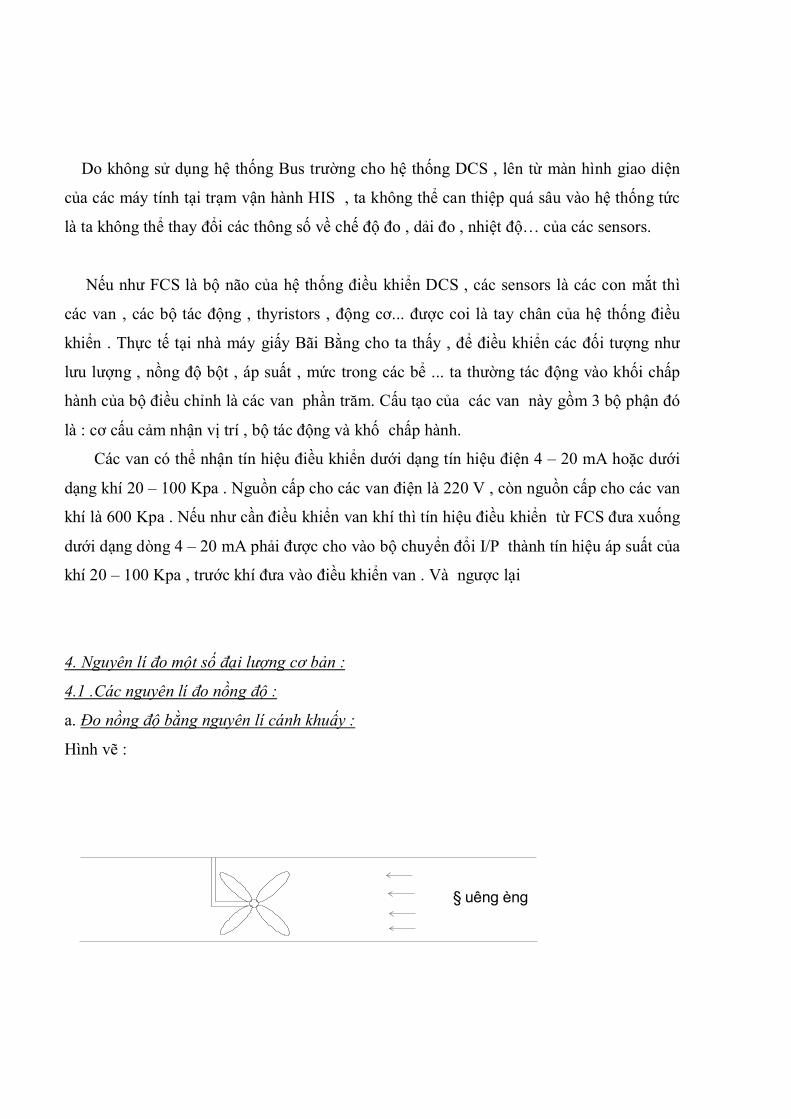
a. Đo nồng độ bằng nguyên lí cánh khuấy :
Hình vẽ :
§ uêng èng
Cánh khuấy gồm có 4 cánh. Trong đó 2 cánh gắn vào một động cơ nhỏ lắp đặt trong
sensor đo , mục đích của 2 cánh này là quấy đều dung dịch bột trước khi đo để tăng độ
chính xác . Còn 2 cánh kia quay khi dòng dung dịch chảy qua . Nồng độ bột càng loãng thì
lực cản 2 cánh này càng nhỏ do đó nó quay càng nhanh và ngược lại , nồng độ bột càng
cao thì lực cản càng lớn nó sẽ quay chậm hơn . Đo tốc độ quay của 2 cánh này ta có thể
suy ra nồng độ bột trong dung dịch .
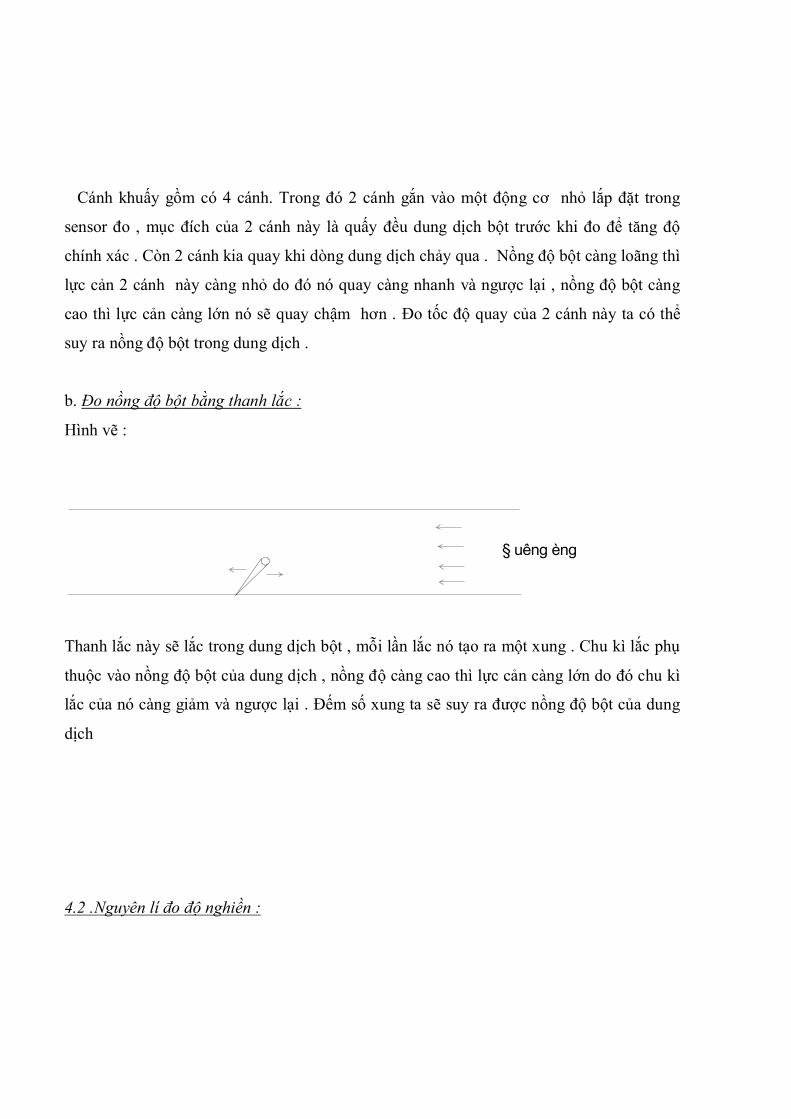
b. Đo nồng độ bột bằng thanh lắc :
Hình vẽ :
§ uêng èng
Thanh lắc này sẽ lắc trong dung dịch bột , mỗi lần lắc nó tạo ra một xung . Chu kì lắc phụ
thuộc vào nồng độ bột của dung dịch , nồng độ càng cao thì lực cản càng lớn do đó chu kì
lắc của nó càng giảm và ngược lại . Đếm số xung ta sẽ suy ra được nồng độ bột của dung
dịch
4.2 .Nguyên lí đo độ nghiền :
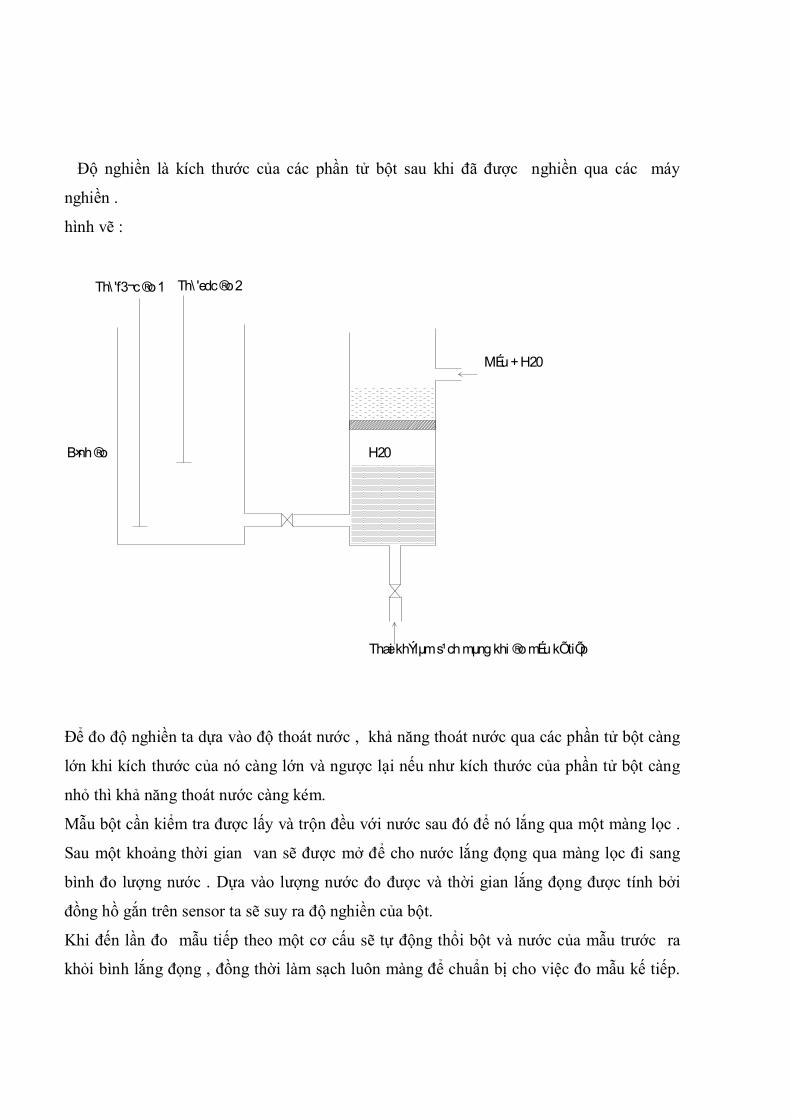
Độ nghiền là kích thước của các phần tử bột sau khi đã được nghiền qua các máy
nghiền .
hình vẽ :
Thæi khÝ lµm s¹ch mµng khi ®o mÉu kÕ tiÕp
Th\ 'edc ®o 2Th\ 'f3¬c ®o 1
MÉu + H20
H20B×nh ®o
Để đo độ nghiền ta dựa vào độ thoát nước , khả năng thoát nước qua các phần tử bột càng
lớn khi kích thước của nó càng lớn và ngược lại nếu như kích thước của phần tử bột càng
nhỏ thì khả năng thoát nước càng kém.
Mẫu bột cần kiểm tra được lấy và trộn đều với nước sau đó để nó lắng qua một màng lọc .
Sau một khoảng thời gian van sẽ được mở để cho nước lắng đọng qua màng lọc đi sang
bình đo lượng nước . Dựa vào lượng nước đo được và thời gian lắng đọng được tính bởi
đồng hồ gắn trên sensor ta sẽ suy ra độ nghiền của bột.
Khi đến lần đo mẫu tiếp theo một cơ cấu sẽ tự động thổi bột và nước của mẫu trước ra
khỏi bình lắng đọng , đồng thời làm sạch luôn màng để chuẩn bị cho việc đo mẫu kế tiếp.

Như vậy sensor đo độ nghiền này chỉ có khả năng đo gián đoạn chứ không đo liên tục . Và
kết quả đo của nó bị ảnh hưởng rất lớn bởi nhiệt độ , do đó ta cần quan tâm tới việc căn
chuẩn nhiệt độ trước khi đo . Hiện nay phân xưởng Xeo mới được trang bị 2 đầu đo độ
nghiền của Nhật .
4.3 Các nguyên lí đo lưu lượng :
a.Lưu lượng kế dũng xoỏy:
Lưu lượng kế dũng xoỏy dựa trờn nguyờn lý khi chất lỏng gặp một vật cản (vortex
shedder) sẽ bị phõn thành cỏc dũng xoỏy ở phớa sau vật. Tại mặt mà cú cỏc dũng xoỏy cú
lưu tốc lớn hơn và có áp suất nhỏ hơn mặt kia. Các dũng xoỏy liờn tiếp được tạo ra sẽ tạo
ra biến thiên dao động áp suất. Hiện tượng này ta có thể thấy rừ ở cỏc lỏ cờ khi cú giú thổi.
Tốc độ dũng chảy được xác định bằng cách điếm số xoáy trong một đơn vị thời gian và
được đo bằng một cảm biến nhạy với biến thiên dao động áp suất (thường sử dụng cảm
biến áp điện).Có thể tham khảo một lưu lượng kế dũng xoáy có cấu tạo như hỡnh dưới:
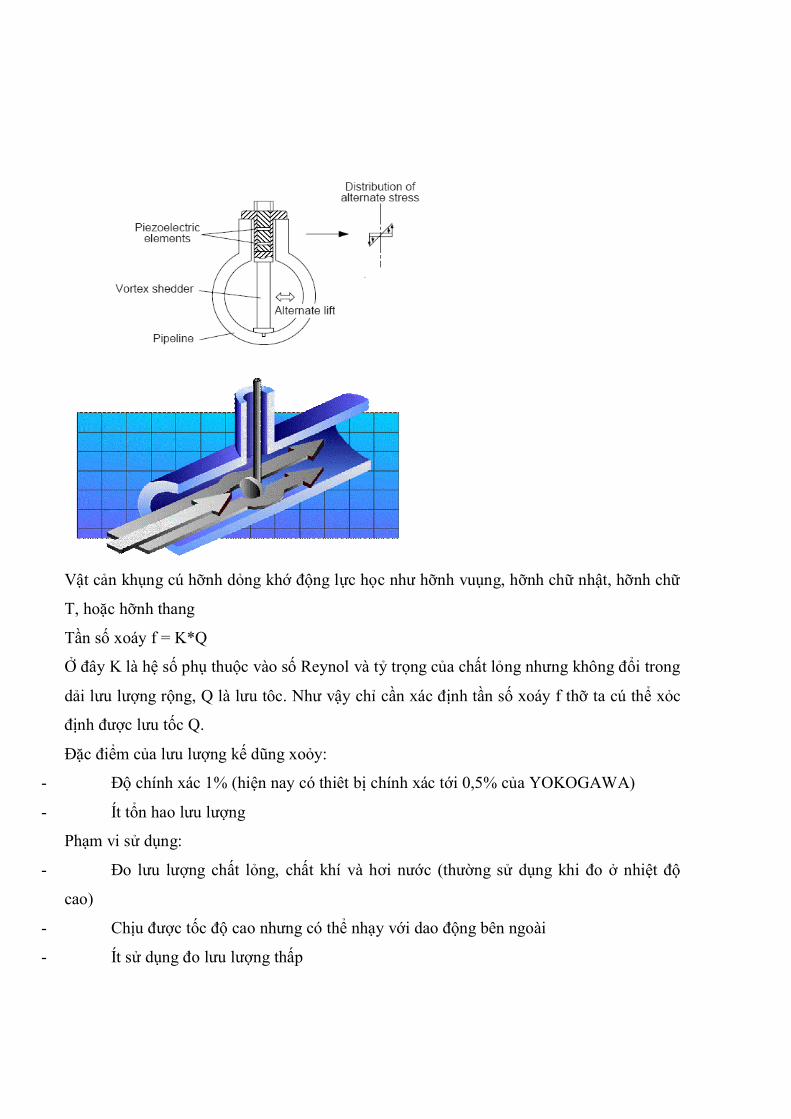
Vật cản khụng cú hỡnh dỏng khớ động lực học như hỡnh vuụng, hỡnh chữ nhật, hỡnh chữ
T, hoặc hỡnh thang
Tần số xoáy f = K*Q
Ở đây K là hệ số phụ thuộc vào số Reynol và tỷ trọng của chất lỏng nhưng không đổi trong
dải lưu lượng rộng, Q là lưu tôc. Như vậy chỉ cần xác định tần số xoáy f thỡ ta cú thể xỏc
định được lưu tốc Q.
Đặc điểm của lưu lượng kế dũng xoỏy:
- Độ chính xác 1% (hiện nay có thiêt bị chính xác tới 0,5% của YOKOGAWA)
- Ít tổn hao lưu lượng
Phạm vi sử dụng:
- Đo lưu lượng chất lỏng, chất khí và hơi nước (thường sử dụng khi đo ở nhiệt độ
cao)
- Chịu được tốc độ cao nhưng có thể nhạy với dao động bên ngoài
- Ít sử dụng đo lưu lượng thấp
Vị trí lắp đặt:
- Tránh những nơi có nhiẹt độ biến thiên phức tạp
- Tránh môi trường ăn mũn
- Tránh sốc rung
b. Lưu lượng kế Coriolis:
hóng ABB
Nguyờn lý hoạt động của lưu lượng kế là gia tốc Coriolis ( nhà vật lý Phỏp 1791 - 1843)
xuất hiện khi một vật đồng thờ chịu tác động của chuyển động quay và chuyển động tịnh
tiến.
Một khối M dịch chuyển với tốc độ có định v trong ống T, ống quay với vận tốc góc cố
định quanh điểm P. Khối này bị tác động bởi hai thành phần gia tốc :
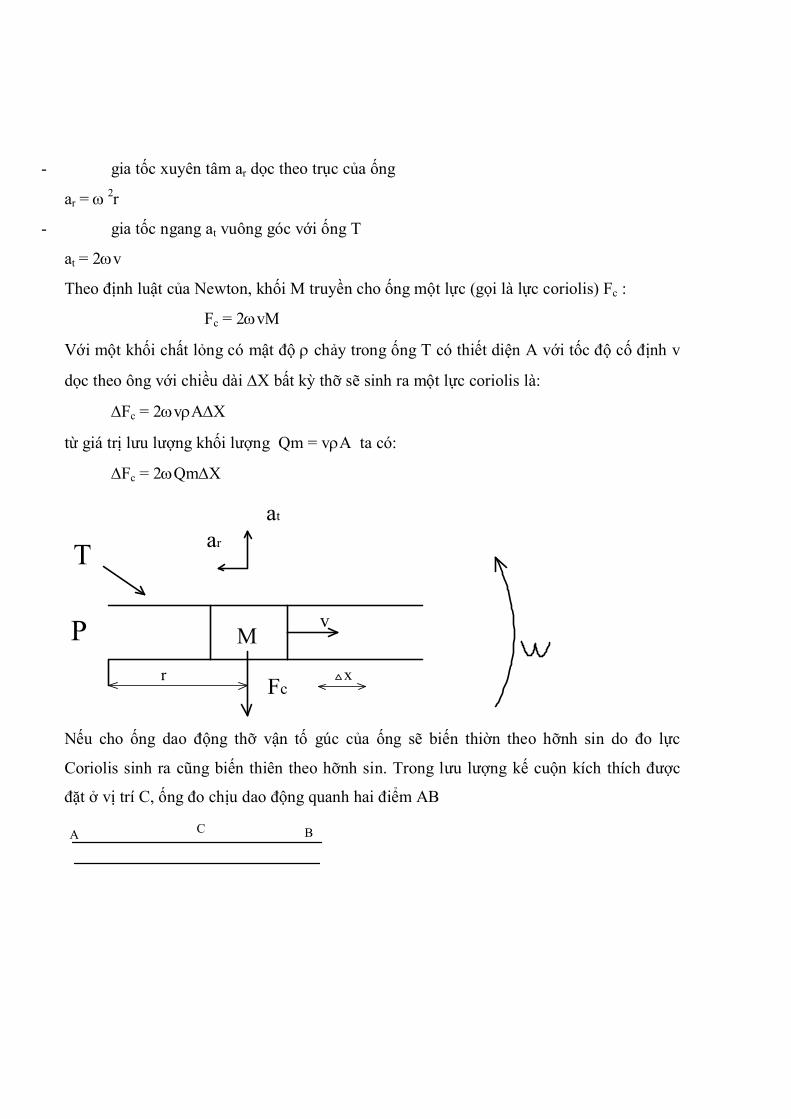
- gia tốc xuyên tâm ar dọc theo trục của ống
ar = 2r
- gia tốc ngang at vuông góc với ống T
at = 2v
Theo định luật của Newton, khối M truyền cho ống một lực (gọi là lực coriolis) Fc :
Fc = 2vM
Với một khối chất lỏng có mật độ chảy trong ống T có thiết diện A với tốc độ cố định v
dọc theo ông với chiều dài X bất kỳ thỡ sẽ sinh ra một lực coriolis là:
Fc = 2vAX
từ giá trị lưu lượng khối lượng Qm = vA ta có:
Fc = 2QmX
M
ar
at
P
T
v
Fcr x
Nếu cho ống dao động thỡ vận tố gúc của ống sẽ biến thiờn theo hỡnh sin do đo lực
Coriolis sinh ra cũng biến thiên theo hỡnh sin. Trong lưu lượng kế cuộn kích thích được
đặt ở vị trí C, ống đo chịu dao động quanh hai điểm AB
A C B
Kết quả là lực Coriolis sinh ra ở mỗi nửa của ống có độ lớn bằng nhau nhưng ngược hướng
nhau. Lực đối này sinh ra momen uốn làm cho ống biến dạng. Chuyển động tổng hợp gây
ra sự lệch pha giữa dao động tại A và dao động tại B. Sự lệch pha này được đo nhờ cảm
biến điện cảm đặt giữa A và B. Góc lệch pha này tương ưng với khoảng thời gian và tỷ lệ
thuận với lưu lượng cần đo.
AB
t
t = f
2
= KQ
K ở đây là một hằng số, f là tần số dao động, Q là lưu lượng cần đo
Đặc điểm của lưu lượng kế này là:
- Độ chính xác cao 0,1%
- Phép đo không phụ thuộc vào đặc tính của chất lỏng
- Đo lưu lượng khối
- Tùy theo nhà cung cấp, ống có dạng cong hoặc thẳng, đơn hoặc kép
Phạm vi sử dụng :
- Đo lưu lượng chất lỏng và chất khí sạch và nhớt
- Đường kính không quá lớn
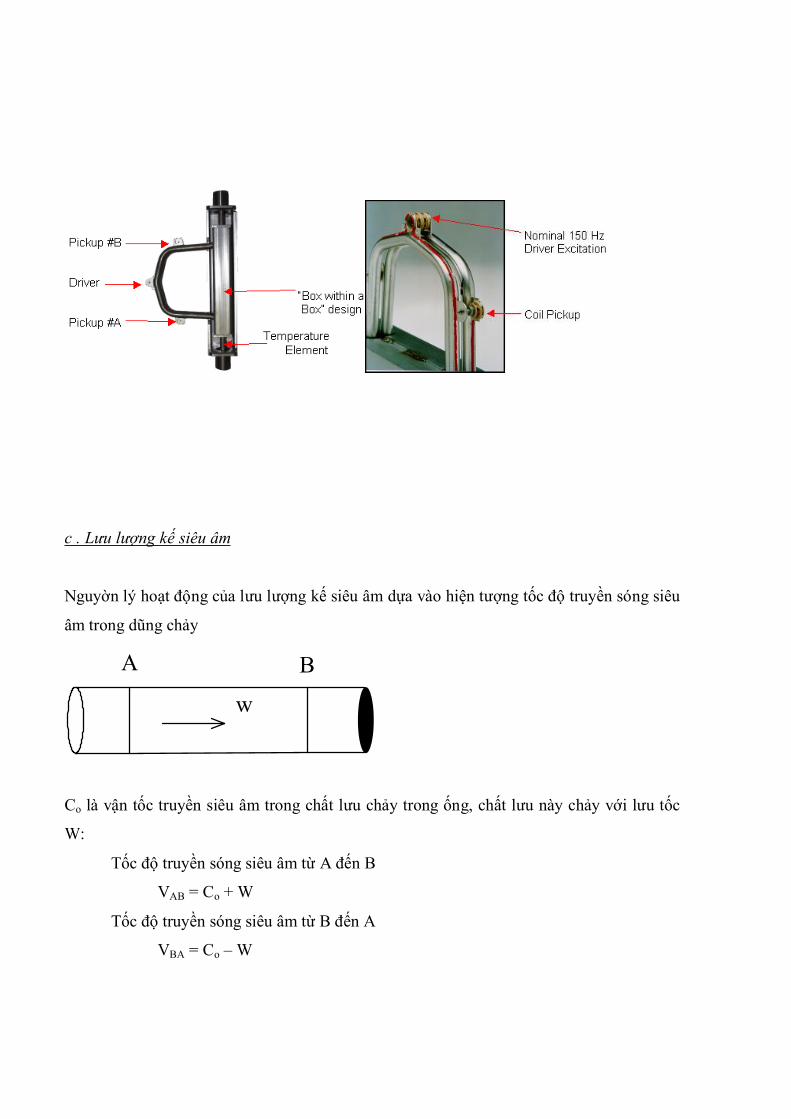
c . Lưu lượng kế siêu âm
Nguyờn lý hoạt động của lưu lượng kế siêu âm dựa vào hiện tượng tốc độ truyền sóng siêu
âm trong dũng chảy
A B
w
Co là vận tốc truyền siêu âm trong chất lưu chảy trong ống, chất lưu này chảy với lưu tốc
W:
Tốc độ truyền sóng siêu âm từ A đến B
VAB = Co + W
Tốc độ truyền sóng siêu âm từ B đến A
VBA = Co – W
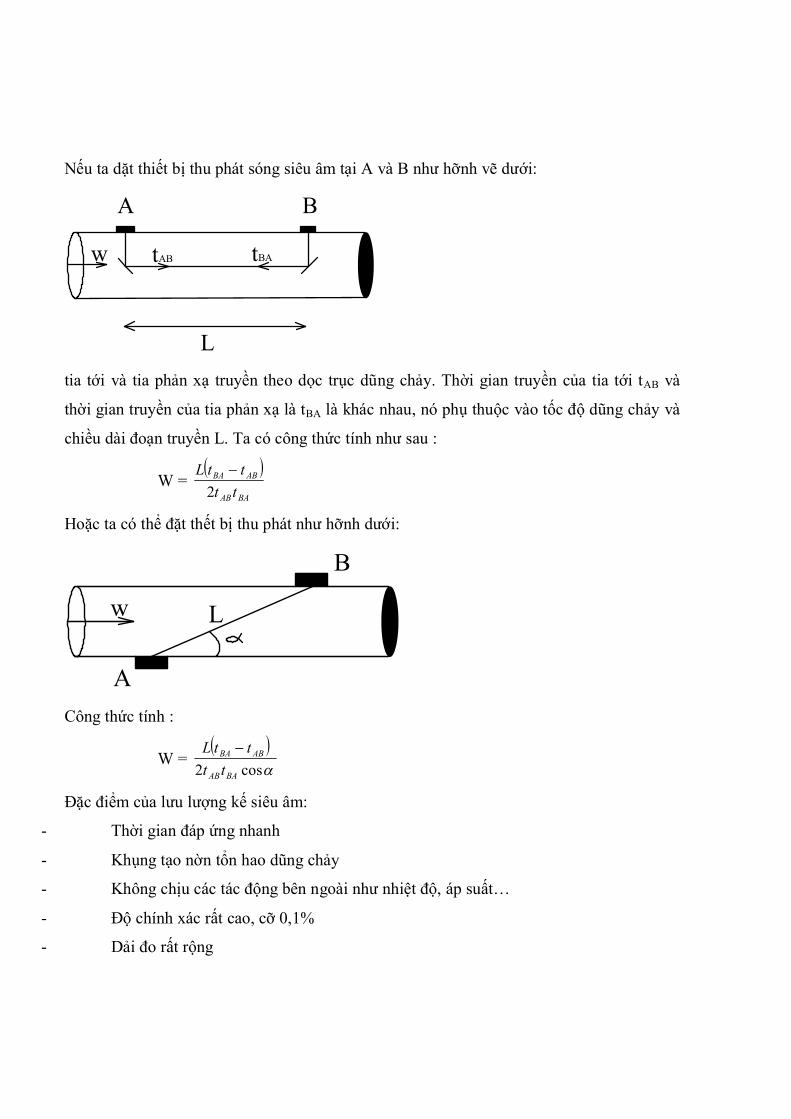
Nếu ta dặt thiết bị thu phát sóng siêu âm tại A và B như hỡnh vẽ dưới:
A B
L
tAB tBAw
tia tới và tia phản xạ truyền theo dọc trục dũng chảy. Thời gian truyền của tia tới tAB và
thời gian truyền của tia phản xạ là tBA là khác nhau, nó phụ thuộc vào tốc độ dũng chảy và
chiều dài đoạn truyền L. Ta có công thức tính như sau :
W =
BAAB
ABBA
ttttL
2
Hoặc ta có thể đặt thết bị thu phát như hỡnh dưới:
A
B
Lw
Công thức tính :
W =
cos2 BAAB
ABBA
ttttL
Đặc điểm của lưu lượng kế siêu âm:
- Thời gian đáp ứng nhanh
- Khụng tạo nờn tổn hao dũng chảy
- Không chịu các tác động bên ngoài như nhiệt độ, áp suất…
- Độ chính xác rất cao, cỡ 0,1%
- Dải đo rất rộng
- Dễ lắp đặt (cảm biến được gắn trên ống)
Phạm vi sử dụng:
- Đo lưu lượng chất lỏng, chất khí
- Một số loại có thể sử dụng cho hơi nước bóo hũa và quỏ nhiệt trờn 400oC
- Có thể đo lưu lượng dũng chảy rối
Lưu lượng kế siêu âm hiệu ứng Doppler
Là một loại lưu lượng kế siêu âm áp dụng hiệu ứng Doppler ( Nhà vật lý người Áo 1803 -
1853 ). Hiệu ứng Doppler là hiện tượng thay đổi tần số của sóng siêu âm phản xạ ừ các
chất lơ lửng, bọt khí ở trong lũng chất lỏng. Dựa vào sự thay đổi tần số ta có thể xác định
đực vận tốc của dũng chất lỏng trờn
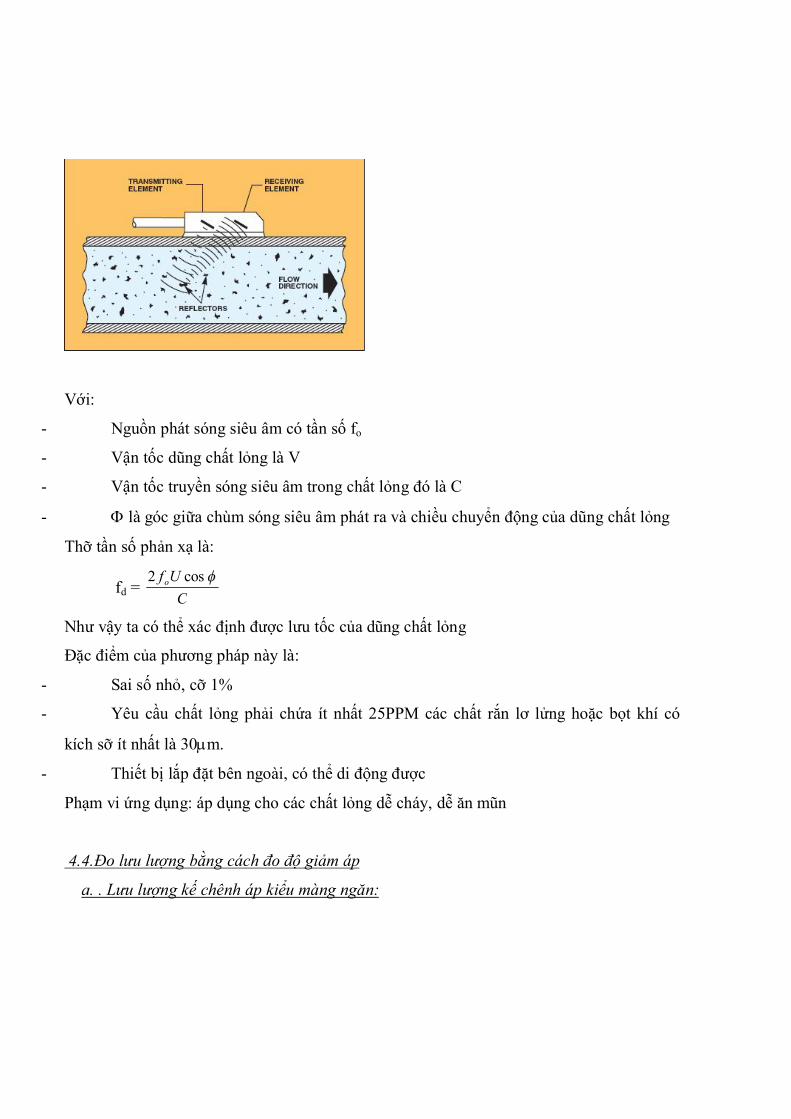
Với:
- Nguồn phát sóng siêu âm có tần số fo
- Vận tốc dũng chất lỏng là V
- Vận tốc truyền sóng siêu âm trong chất lỏng đó là C
- là góc giữa chùm sóng siêu âm phát ra và chiều chuyển động của dũng chất lỏng
Thỡ tần số phản xạ là:
fd = C
Ufo cos2
Như vậy ta có thể xác định được lưu tốc của dũng chất lỏng
Đặc điểm của phương pháp này là:
- Sai số nhỏ, cỡ 1%
- Yêu cầu chất lỏng phải chứa ít nhất 25PPM các chất rắn lơ lửng hoặc bọt khí có
kích sỡ ít nhất là 30m.
- Thiết bị lắp đặt bên ngoài, có thể di động được
Phạm vi ứng dụng: áp dụng cho các chất lỏng dễ cháy, dễ ăn mũn
4.4.Đo lưu lượng bằng cách đo độ giảm áp
a. . Lưu lượng kế chênh áp kiểu màng ngăn:
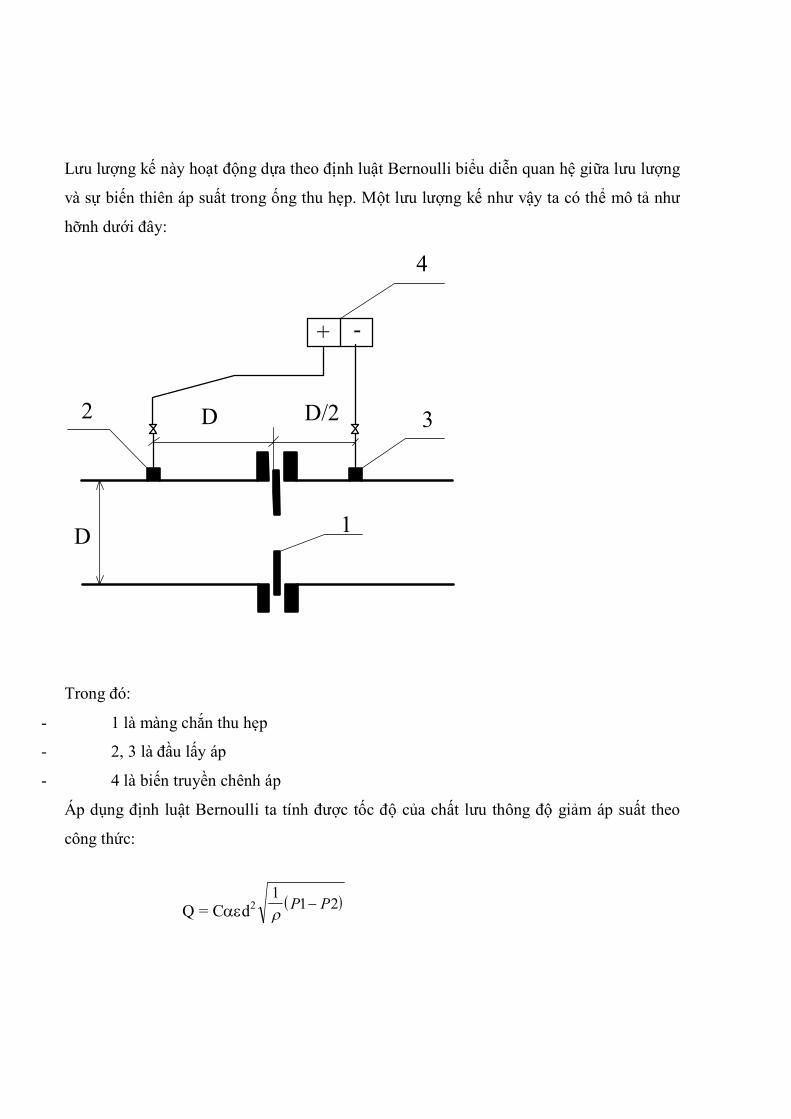
Lưu lượng kế này hoạt động dựa theo định luật Bernoulli biểu diễn quan hệ giữa lưu lượng
và sự biến thiên áp suất trong ống thu hẹp. Một lưu lượng kế như vậy ta có thể mô tả như
hỡnh dưới đây:
D D/2
+ -
D
4
2 3
1
Trong đó:
- 1 là màng chắn thu hẹp
- 2, 3 là đầu lấy áp
- 4 là biến truyền chênh áp
Áp dụng định luật Bernoulli ta tính được tốc độ của chất lưu thông độ giảm áp suất theo
công thức:
Q = Cd2 211
PP
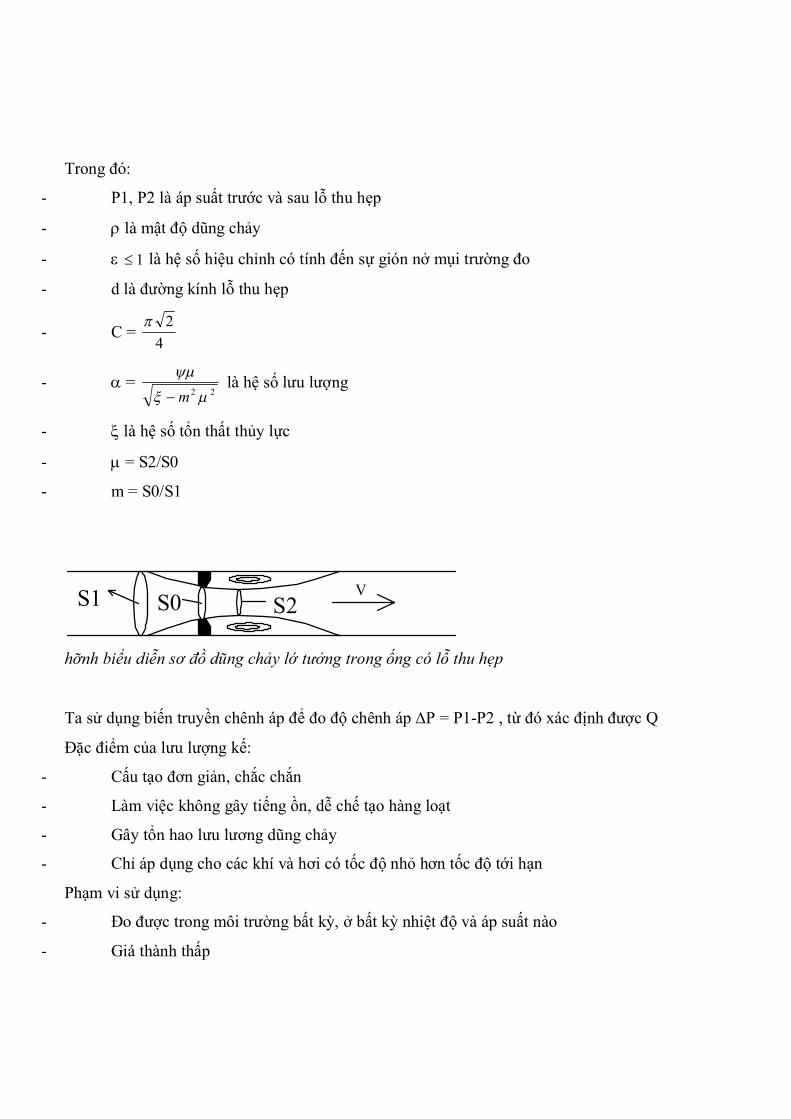
Trong đó:
- P1, P2 là áp suất trước và sau lỗ thu hẹp
- là mật độ dũng chảy
- 1 là hệ số hiệu chỉnh có tính đến sự gión nở mụi trường đo
- d là đường kính lỗ thu hẹp
- C = 4
2
- = 22
m là hệ số lưu lượng
- là hệ số tổn thất thủy lực
- = S2/S0
- m = S0/S1
S1 S0 S2V
hỡnh biểu diễn sơ đồ dũng chảy lớ tưởng trong ống có lỗ thu hẹp
Ta sử dụng biến truyền chênh áp để đo độ chênh áp P = P1-P2 , từ đó xác định được Q
Đặc điểm của lưu lượng kế:
- Cấu tạo đơn giản, chắc chắn
- Làm việc không gây tiếng ồn, dễ chế tạo hàng loạt
- Gây tổn hao lưu lương dũng chảy
- Chỉ áp dụng cho các khí và hơi có tốc độ nhỏ hơn tốc độ tới hạn
Phạm vi sử dụng:
- Đo được trong môi trường bất kỳ, ở bất kỳ nhiệt độ và áp suất nào
- Giá thành thấp
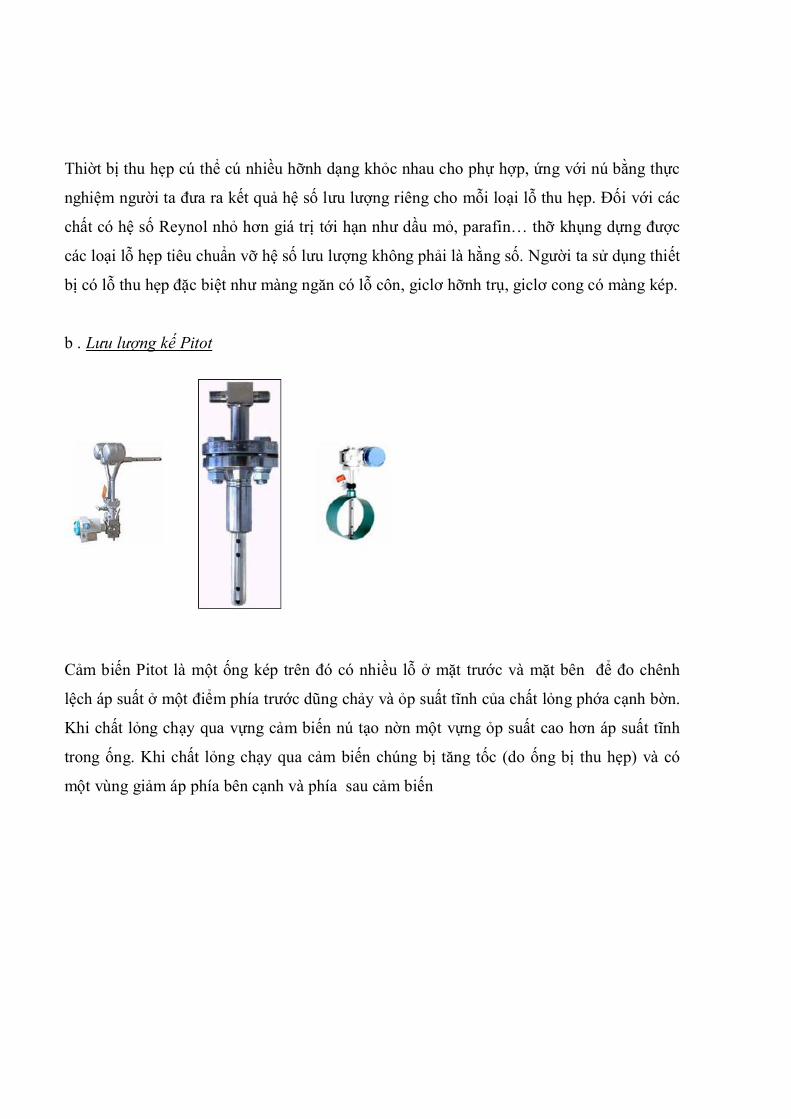
Thiờt bị thu hẹp cú thể cú nhiều hỡnh dạng khỏc nhau cho phự hợp, ứng với nú bằng thực
nghiệm người ta đưa ra kết quả hệ số lưu lượng riêng cho mỗi loại lỗ thu hẹp. Đối với các
chất có hệ số Reynol nhỏ hơn giá trị tới hạn như dầu mỏ, parafin… thỡ khụng dựng được
các loại lỗ hẹp tiêu chuẩn vỡ hệ số lưu lượng không phải là hằng số. Người ta sử dụng thiết
bị có lỗ thu hẹp đặc biệt như màng ngăn có lỗ côn, giclơ hỡnh trụ, giclơ cong có màng kép.
b . Lưu lượng kế Pitot
Cảm biến Pitot là một ống kép trên đó có nhiều lỗ ở mặt trước và mặt bên để đo chênh
lệch áp suất ở một điểm phía trước dũng chảy và ỏp suất tĩnh của chất lỏng phớa cạnh bờn.
Khi chất lỏng chạy qua vựng cảm biến nú tạo nờn một vựng ỏp suất cao hơn áp suất tĩnh
trong ống. Khi chất lỏng chạy qua cảm biến chúng bị tăng tốc (do ống bị thu hẹp) và có
một vùng giảm áp phía bên cạnh và phía sau cảm biến
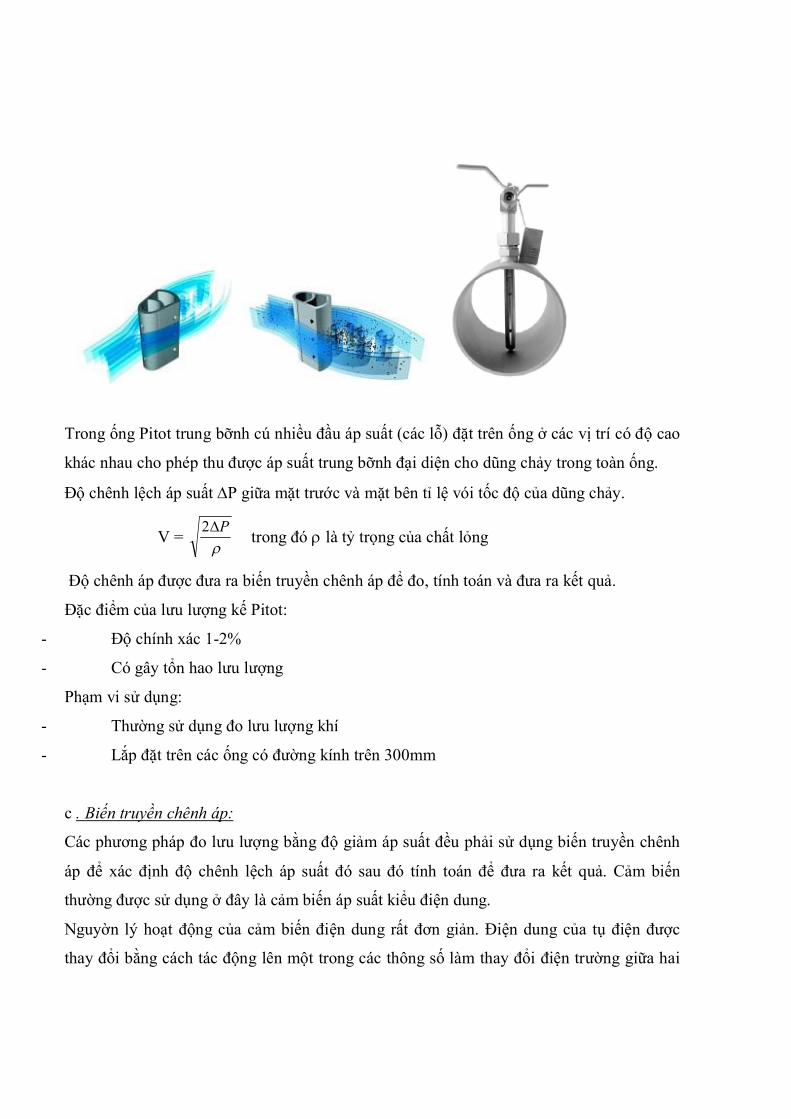
Trong ống Pitot trung bỡnh cú nhiều đầu áp suất (các lỗ) đặt trên ống ở các vị trí có độ cao
khác nhau cho phép thu được áp suất trung bỡnh đại diện cho dũng chảy trong toàn ống.
Độ chênh lệch áp suất P giữa mặt trước và mặt bên tỉ lệ vói tốc độ của dũng chảy.
V = P2 trong đó là tỷ trọng của chất lỏng
Độ chênh áp được đưa ra biến truyền chênh áp để đo, tính toán và đưa ra kết quả.
Đặc điểm của lưu lượng kế Pitot:
- Độ chính xác 1-2%
- Có gây tổn hao lưu lượng
Phạm vi sử dụng:
- Thường sử dụng đo lưu lượng khí
- Lắp đặt trên các ống có đường kính trên 300mm
c . Biến truyền chênh áp:
Các phương pháp đo lưu lượng bằng độ giảm áp suất đều phải sử dụng biến truyền chênh
áp để xác định độ chênh lệch áp suất đó sau đó tính toán để đưa ra kết quả. Cảm biến
thường được sử dụng ở đây là cảm biến áp suất kiểu điện dung.
Nguyờn lý hoạt động của cảm biến điện dung rất đơn giản. Điện dung của tụ điện được
thay đổi bằng cách tác động lên một trong các thông số làm thay đổi điện trường giữa hai
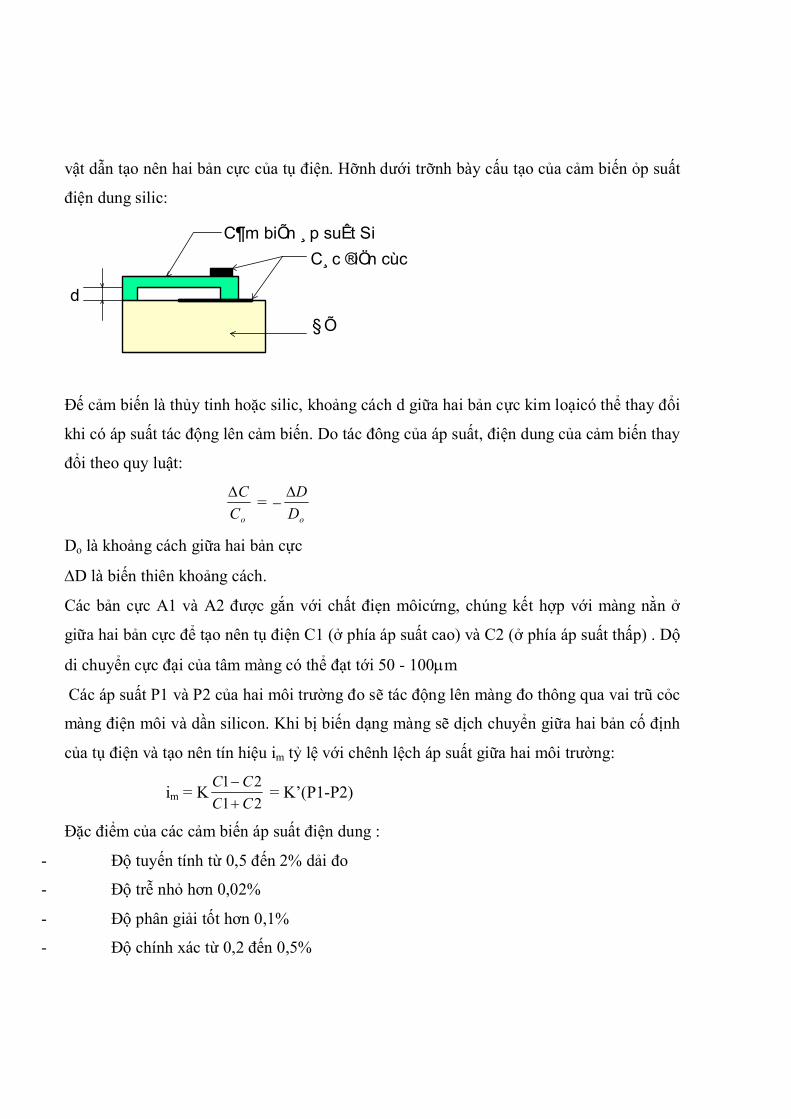
vật dẫn tạo nên hai bản cực của tụ điện. Hỡnh dưới trỡnh bày cấu tạo của cảm biến ỏp suất
điện dung silic:
§ Õ
C¸ c ®iÖn cùcC¶m biÕn ¸ p suÊt Si
d
Đế cảm biến là thủy tinh hoặc silic, khoảng cách d giữa hai bản cực kim loạicó thể thay đổi
khi có áp suất tác động lên cảm biến. Do tác đông của áp suất, điện dung của cảm biến thay
đổi theo quy luật:
oCC
= oDD
Do là khoảng cách giữa hai bản cực
D là biến thiên khoảng cách.
Các bản cực A1 và A2 được gắn với chất điẹn môicứng, chúng kết hợp với màng nằn ở
giữa hai bản cực để tạo nên tụ điện C1 (ở phía áp suất cao) và C2 (ở phía áp suất thấp) . Dộ
di chuyển cực đại của tâm màng có thể đạt tới 50 - 100m
Các áp suất P1 và P2 của hai môi trường đo sẽ tác động lên màng đo thông qua vai trũ cỏc
màng điện môi và dần silicon. Khi bị biến dạng màng sẽ dịch chuyển giữa hai bản cố định
của tụ điện và tạo nên tín hiệu im tỷ lệ với chênh lệch áp suất giữa hai môi trường:
im = K2121
CCCC
= K’(P1-P2)
Đặc điểm của các cảm biến áp suất điện dung :
- Độ tuyến tính từ 0,5 đến 2% dải đo
- Độ trễ nhỏ hơn 0,02%
- Độ phân giải tốt hơn 0,1%
- Độ chính xác từ 0,2 đến 0,5%
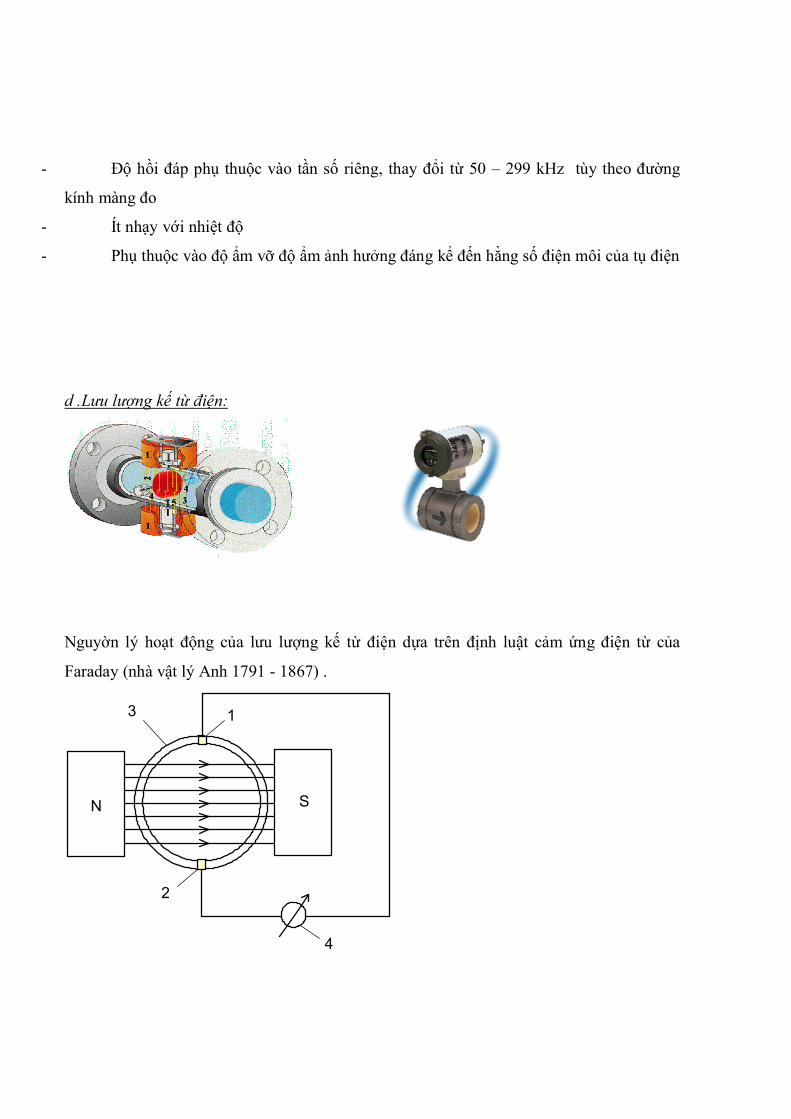
- Độ hồi đáp phụ thuộc vào tần số riêng, thay đổi từ 50 – 299 kHz tùy theo đường
kính màng đo
- Ít nhạy với nhiệt độ
- Phụ thuộc vào độ ẩm vỡ độ ẩm ảnh hưởng đáng kể đến hằng số điện môi của tụ điện
d .Lưu lượng kế từ điện:
Nguyờn lý hoạt động của lưu lượng kế từ điện dựa trên định luật cảm ứng điện từ của
Faraday (nhà vật lý Anh 1791 - 1867) .
4
2
13
N S
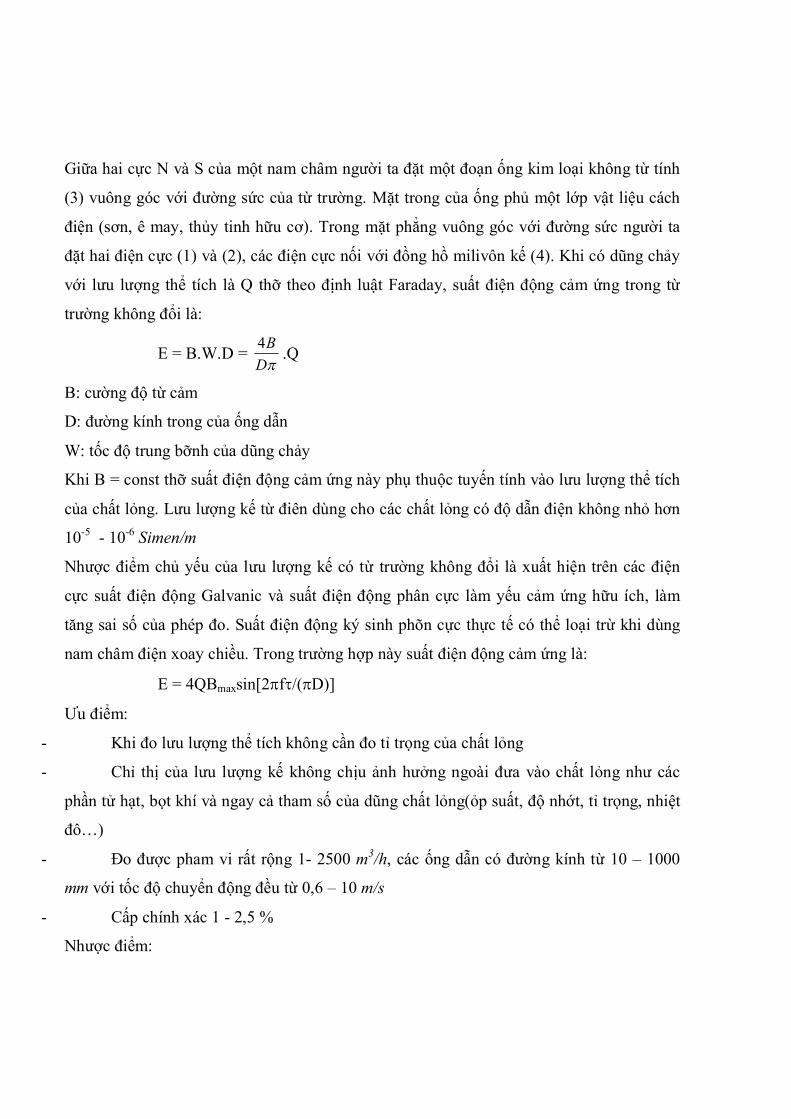
Giữa hai cực N và S của một nam châm người ta đặt một đoạn ống kim loại không từ tính
(3) vuông góc với đường sức của từ trường. Mặt trong của ống phủ một lớp vật liệu cách
điện (sơn, ê may, thủy tinh hữu cơ). Trong mặt phẳng vuông góc với đường sức người ta
đặt hai điện cực (1) và (2), các điện cực nối với đồng hồ milivôn kế (4). Khi có dũng chảy
với lưu lượng thể tích là Q thỡ theo định luật Faraday, suất điện động cảm ứng trong từ
trường không đổi là:
E = B.W.D = DB4 .Q
B: cường độ từ cảm
D: đường kính trong của ống dẫn
W: tốc độ trung bỡnh của dũng chảy
Khi B = const thỡ suất điện động cảm ứng này phụ thuộc tuyến tính vào lưu lượng thể tích
của chất lỏng. Lưu lượng kế từ điên dùng cho các chất lỏng có độ dẫn điện không nhỏ hơn
10-5 - 10-6 Simen/m
Nhược điểm chủ yếu của lưu lượng kế có từ trường không đổi là xuất hiện trên các điện
cực suất điện động Galvanic và suất điện động phân cực làm yếu cảm ứng hữu ích, làm
tăng sai số của phép đo. Suất điện động ký sinh phõn cực thực tế có thể loại trừ khi dùng
nam châm điện xoay chiều. Trong trường hợp này suất điện động cảm ứng là:
E = 4QBmaxsin[2f/(D)]
Ưu điểm:
- Khi đo lưu lượng thể tích không cần đo tỉ trọng của chất lỏng
- Chỉ thị của lưu lượng kế không chịu ảnh hưởng ngoài đưa vào chất lỏng như các
phần tử hạt, bọt khí và ngay cả tham số của dũng chất lỏng(ỏp suất, độ nhớt, tỉ trọng, nhiệt
đô…)
- Đo được pham vi rất rộng 1- 2500 m3/h, các ống dẫn có đường kính từ 10 – 1000
mm với tốc độ chuyển động đều từ 0,6 – 10 m/s
- Cấp chính xác 1 - 2,5 %
Nhược điểm:
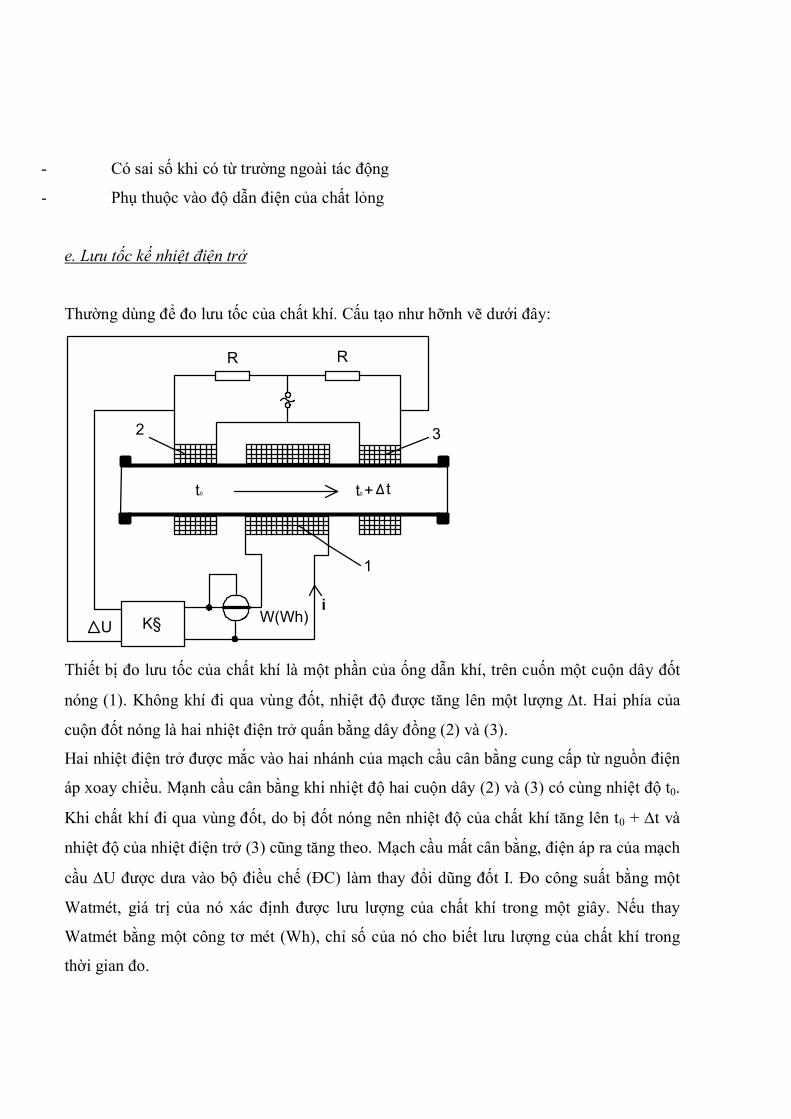
- Có sai số khi có từ trường ngoài tác động
- Phụ thuộc vào độ dẫn điện của chất lỏng
e. Lưu tốc kế nhiệt điện trở
Thường dùng để đo lưu tốc của chất khí. Cấu tạo như hỡnh vẽ dưới đây:
K§Ui
W(Wh)
1
t0 t0 + t
3
R R
2
Thiết bị đo lưu tốc của chất khí là một phần của ống dẫn khí, trên cuốn một cuộn dây đốt
nóng (1). Không khí đi qua vùng đốt, nhiệt độ được tăng lên một lượng t. Hai phía của
cuộn đốt nóng là hai nhiệt điện trở quấn bằng dây đồng (2) và (3).
Hai nhiệt điện trở được mắc vào hai nhánh của mạch cầu cân bằng cung cấp từ nguồn điện
áp xoay chiều. Mạnh cầu cân bằng khi nhiệt độ hai cuộn dây (2) và (3) có cùng nhiệt độ t0.
Khi chất khí đi qua vùng đốt, do bị đốt nóng nên nhiệt độ của chất khí tăng lên t0 + t và
nhiệt độ của nhiệt điện trở (3) cũng tăng theo. Mạch cầu mất cân bằng, điện áp ra của mạch
cầu U được dưa vào bộ điều chế (ĐC) làm thay đổi dũng đốt I. Đo công suất bằng một
Watmét, giá trị của nó xác định được lưu lượng của chất khí trong một giây. Nếu thay
Watmét bằng một công tơ mét (Wh), chỉ số của nó cho biết lưu lượng của chất khí trong
thời gian đo.
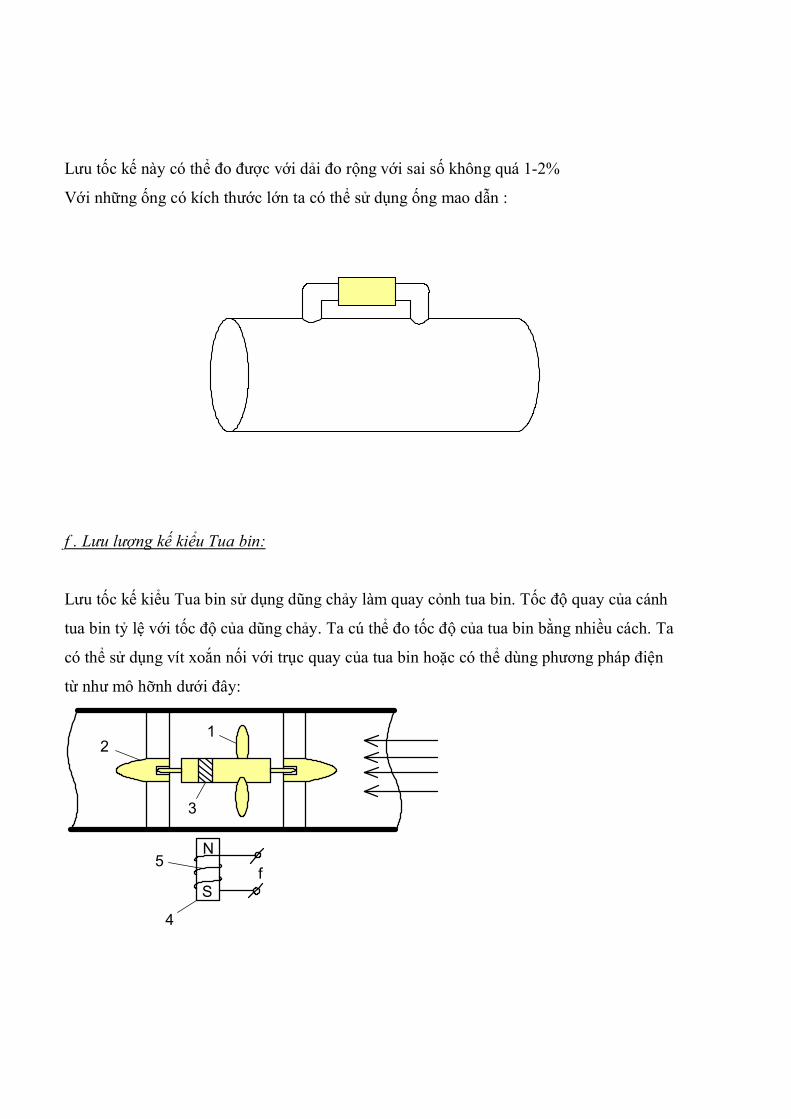
Lưu tốc kế này có thể đo được với dải đo rộng với sai số không quá 1-2%
Với những ống có kích thước lớn ta có thể sử dụng ống mao dẫn :
f . Lưu lượng kế kiểu Tua bin:
Lưu tốc kế kiểu Tua bin sử dụng dũng chảy làm quay cỏnh tua bin. Tốc độ quay của cánh
tua bin tỷ lệ với tốc độ của dũng chảy. Ta cú thể đo tốc độ của tua bin bằng nhiều cách. Ta
có thể sử dụng vít xoắn nối với trục quay của tua bin hoặc có thể dùng phương pháp điện
từ như mô hỡnh dưới đây:
N
Sf
12
3
4
5
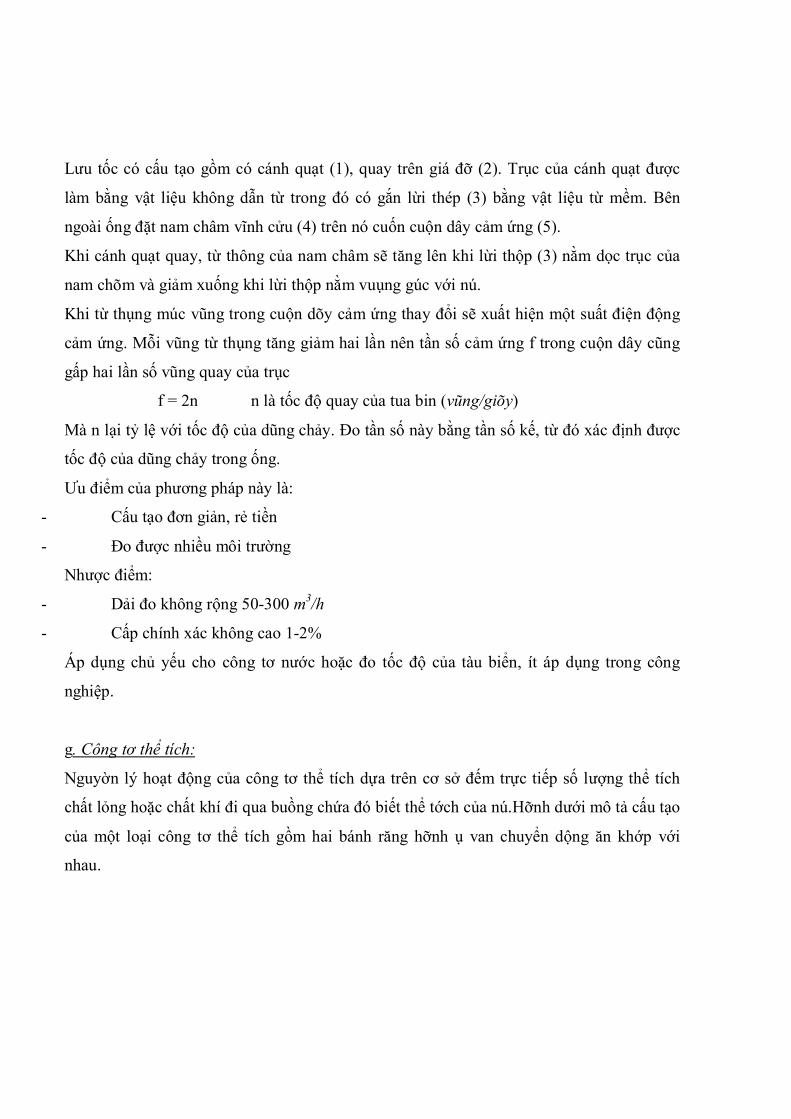
Lưu tốc có cấu tạo gồm có cánh quạt (1), quay trên giá đỡ (2). Trục của cánh quạt được
làm bằng vật liệu không dẫn từ trong đó có gắn lừi thép (3) bằng vật liệu từ mềm. Bên
ngoài ống đặt nam châm vĩnh cửu (4) trên nó cuốn cuộn dây cảm ứng (5).
Khi cánh quạt quay, từ thông của nam châm sẽ tăng lên khi lừi thộp (3) nằm dọc trục của
nam chõm và giảm xuống khi lừi thộp nằm vuụng gúc với nú.
Khi từ thụng múc vũng trong cuộn dõy cảm ứng thay đổi sẽ xuất hiện một suất điện động
cảm ứng. Mỗi vũng từ thụng tăng giảm hai lần nên tần số cảm ứng f trong cuộn dây cũng
gấp hai lần số vũng quay của trục
f = 2n n là tốc độ quay của tua bin (vũng/giõy)
Mà n lại tỷ lệ với tốc độ của dũng chảy. Đo tần số này bằng tần số kế, từ đó xác định được
tốc độ của dũng chảy trong ống.
Ưu điểm của phương pháp này là:
- Cấu tạo đơn giản, rẻ tiền
- Đo được nhiều môi trường
Nhược điểm:
- Dải đo không rộng 50-300 m3/h
- Cấp chính xác không cao 1-2%
Áp dụng chủ yếu cho công tơ nước hoặc đo tốc độ của tàu biển, ít áp dụng trong công
nghiệp.
g. Công tơ thể tích:
Nguyờn lý hoạt động của công tơ thể tích dựa trên cơ sở đếm trực tiếp số lượng thể tích
chất lỏng hoặc chất khí đi qua buồng chứa đó biết thể tớch của nú.Hỡnh dưới mô tả cấu tạo
của một loại công tơ thể tích gồm hai bánh răng hỡnh ụ van chuyển dộng ăn khớp với
nhau.
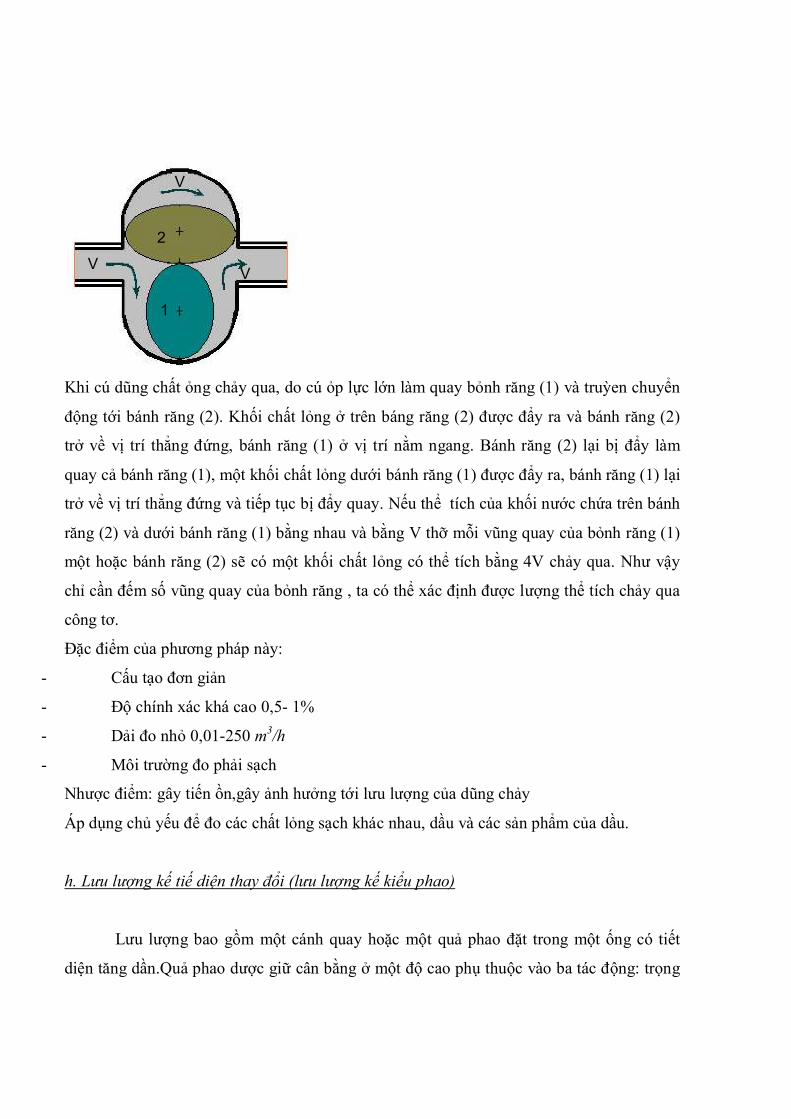
V
VV
2
1
Khi cú dũng chất ỏng chảy qua, do cú ỏp lực lớn làm quay bỏnh răng (1) và truỳen chuyển
động tới bánh răng (2). Khối chất lỏng ở trên báng răng (2) được đẩy ra và bánh răng (2)
trở về vị trí thẳng đứng, bánh răng (1) ở vị trí nằm ngang. Bánh răng (2) lại bị đẩy làm
quay cả bánh răng (1), một khối chất lỏng dưới bánh răng (1) được đẩy ra, bánh răng (1) lại
trở về vị trí thẳng đứng và tiếp tục bị đẩy quay. Nếu thể tích của khối nước chứa trên bánh
răng (2) và dưới bánh răng (1) bằng nhau và bằng V thỡ mỗi vũng quay của bỏnh răng (1)
một hoặc bánh răng (2) sẽ có một khối chất lỏng có thể tích bằng 4V chảy qua. Như vậy
chỉ cần đếm số vũng quay của bỏnh răng , ta có thể xác định được lượng thể tích chảy qua
công tơ.
Đặc điểm của phương pháp này:
- Cấu tạo đơn giản
- Độ chính xác khá cao 0,5- 1%
- Dải đo nhỏ 0,01-250 m3/h
- Môi trường đo phải sạch
Nhược điểm: gây tiến ồn,gây ảnh hưởng tới lưu lượng của dũng chảy
Áp dụng chủ yếu để đo các chất lỏng sạch khác nhau, dầu và các sản phẩm của dầu.
h. Lưu lượng kế tiế diện thay đổi (lưu lượng kế kiểu phao)
Lưu lượng bao gồm một cánh quay hoặc một quả phao đặt trong một ống có tiết
diện tăng dần.Quả phao dược giữ cân bằng ở một độ cao phụ thuộc vào ba tác động: trọng
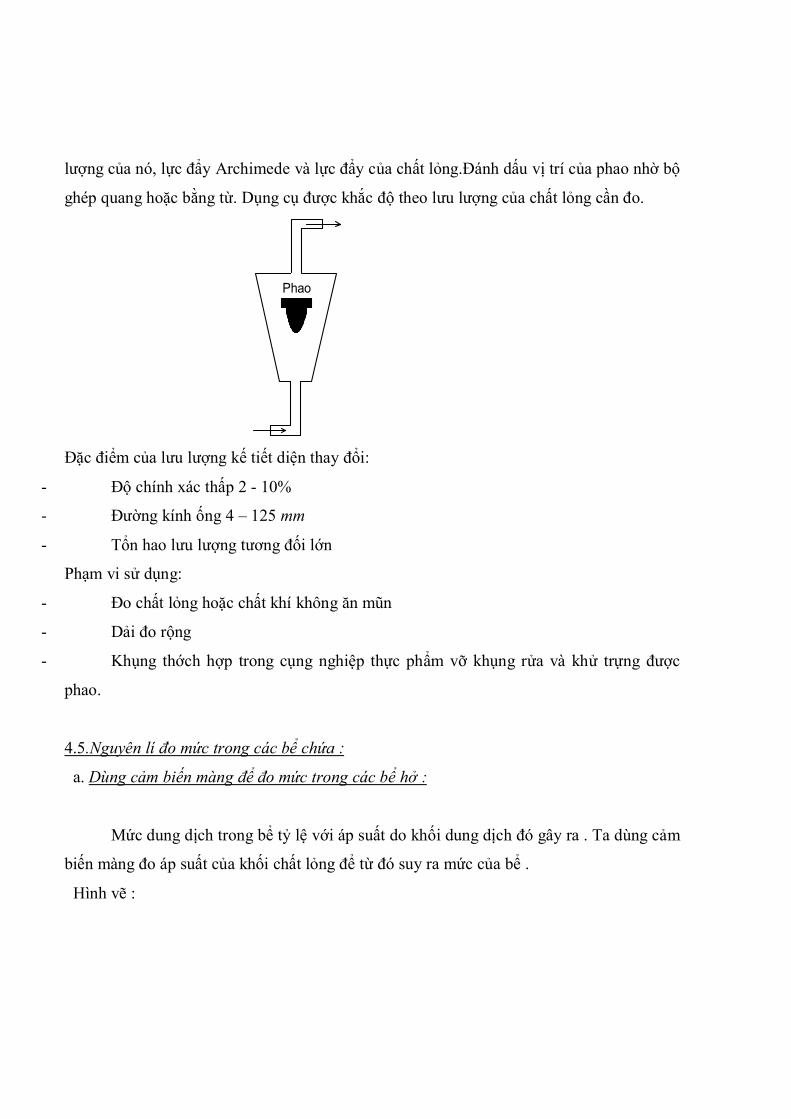
lượng của nó, lực đẩy Archimede và lực đẩy của chất lỏng.Đánh dấu vị trí của phao nhờ bộ
ghép quang hoặc bằng từ. Dụng cụ được khắc độ theo lưu lượng của chất lỏng cần đo.
Phao
Đặc điểm của lưu lượng kế tiết diện thay đổi:
- Độ chính xác thấp 2 - 10%
- Đường kính ống 4 – 125 mm
- Tổn hao lưu lượng tương đối lớn
Phạm vi sử dụng:
- Đo chất lỏng hoặc chất khí không ăn mũn
- Dải đo rộng
- Khụng thớch hợp trong cụng nghiệp thực phẩm vỡ khụng rửa và khử trựng được
phao.
4.5.Nguyên lí đo mức trong các bể chứa :
a. Dùng cảm biến màng để đo mức trong các bể hở :
Mức dung dịch trong bể tỷ lệ với áp suất do khối dung dịch đó gây ra . Ta dùng cảm
biến màng đo áp suất của khối chất lỏng để từ đó suy ra mức của bể .
Hình vẽ :
b. Đo mức trong bể hở bởi cảm biến điện dung:
Hình vẽ :
Đo mức bằng tụ:
Ta thấy rằng điện dung của tụ sẽ biến thiên theo mức trong bể , đo sự biến thiên điện
dung của tụ ta sẽ suy ra mức của bể. Phương pháp này thường áp dụng cho những dung
dịch có độ PH ổn định
c. Đo mức trong bể hở bởi phương pháp sủi bọt :
Hình vẽ:
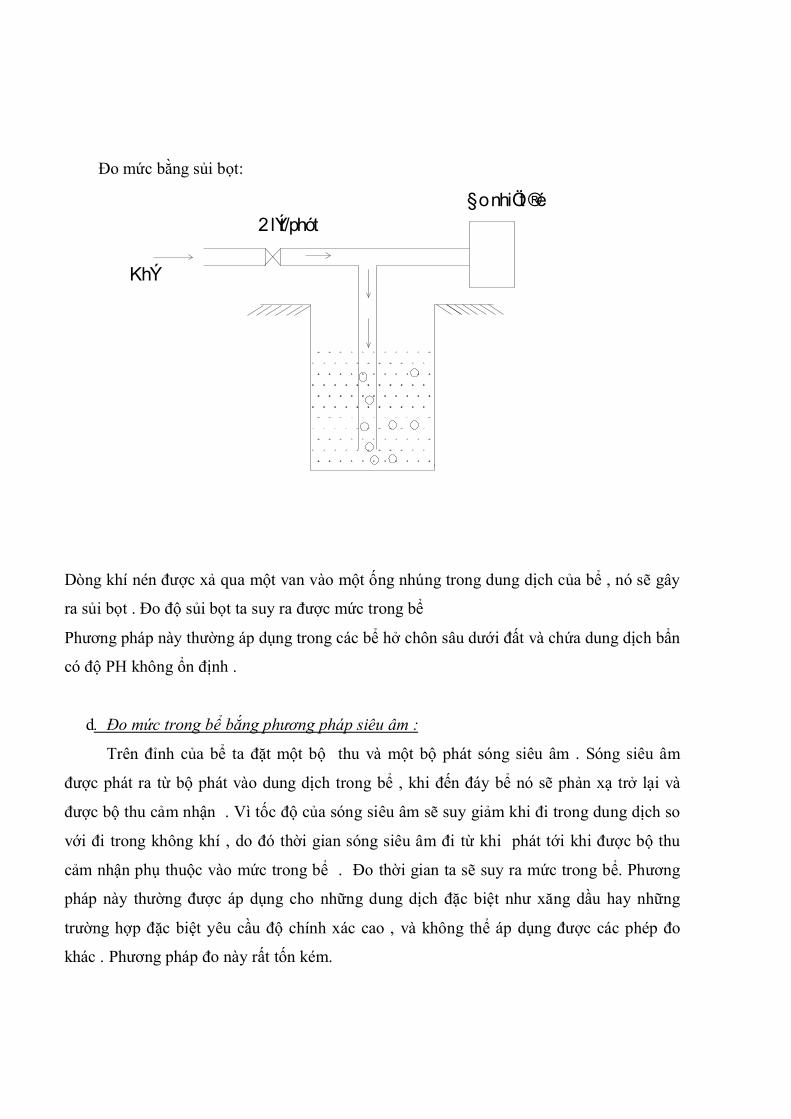
Đo mức bằng sủi bọt:
KhÝ
2 lÝt/phót§o nhiÖt ®é
Dòng khí nén được xả qua một van vào một ống nhúng trong dung dịch của bể , nó sẽ gây
ra sủi bọt . Đo độ sủi bọt ta suy ra được mức trong bể
Phương pháp này thường áp dụng trong các bể hở chôn sâu dưới đất và chứa dung dịch bẩn
có độ PH không ổn định .
d. Đo mức trong bể bắng phương pháp siêu âm :
Trên đỉnh của bể ta đặt một bộ thu và một bộ phát sóng siêu âm . Sóng siêu âm
được phát ra từ bộ phát vào dung dịch trong bể , khi đến đáy bể nó sẽ phản xạ trở lại và
được bộ thu cảm nhận . Vì tốc độ của sóng siêu âm sẽ suy giảm khi đi trong dung dịch so
với đi trong không khí , do đó thời gian sóng siêu âm đi từ khi phát tới khi được bộ thu
cảm nhận phụ thuộc vào mức trong bể . Đo thời gian ta sẽ suy ra mức trong bể. Phương
pháp này thường được áp dụng cho những dung dịch đặc biệt như xăng dầu hay những
trường hợp đặc biệt yêu cầu độ chính xác cao , và không thể áp dụng được các phép đo
khác . Phương pháp đo này rất tốn kém.
e. Đo mức trong bể kín theo nguyên lí bình thông nhau :
Hình vẽ :
Ta dùng một ống thuỷ tinh dễ quan sát , nối thông với bể cần đo . Nhìn vào mức trong
ống thuỷ tinh ta sẽ suy ra mức trong bể . Phương pháp đo này chỉ có tác dụng để người
vận hành quan sát , chẳng hạn như mức trong các bể dầu ....
f . Đo mức trong bể kín bằng nguyên lí chênh áp :
Hình vẽ :
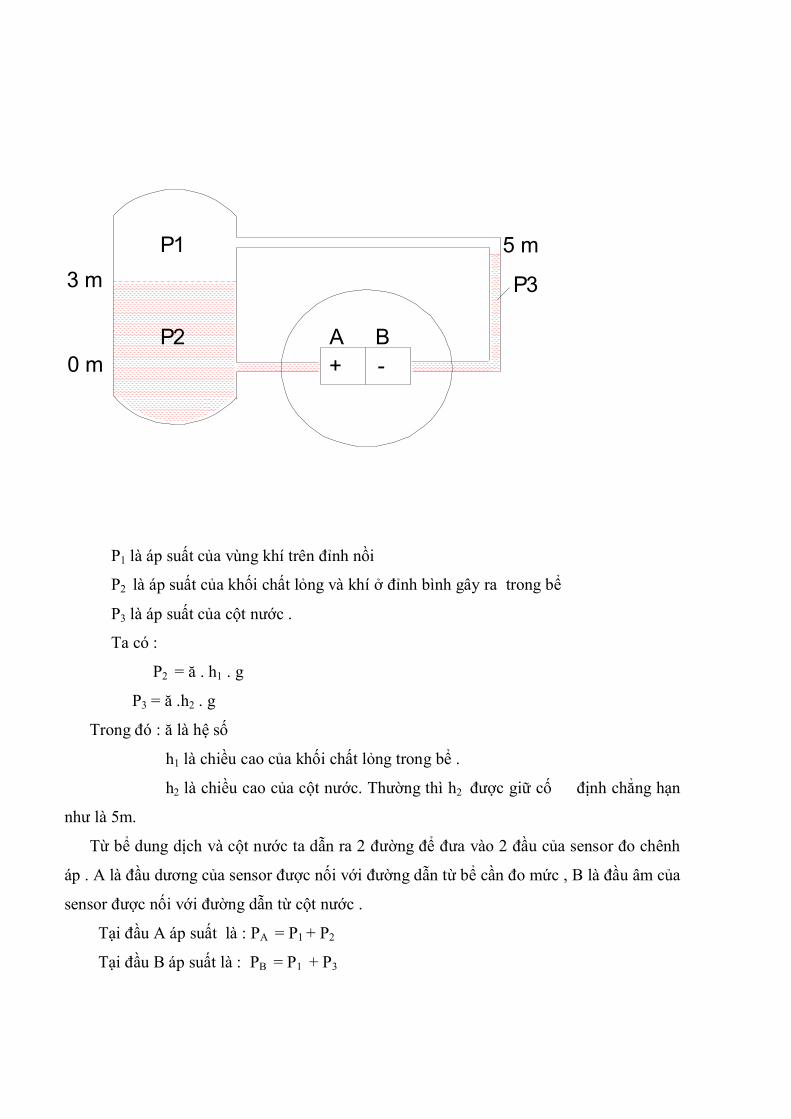
P1
P2
P3
A B+ -0 m
3 m5 m
P1 là áp suất của vùng khí trên đỉnh nồi
P2 là áp suất của khối chất lỏng và khí ở đỉnh bình gây ra trong bể
P3 là áp suất của cột nước .
Ta có :
P2 = ă . h1 . g
P3 = ă .h2 . g
Trong đó : ă là hệ số
h1 là chiều cao của khối chất lỏng trong bể .
h2 là chiều cao của cột nước. Thường thì h2 được giữ cố định chẳng hạn
như là 5m.
Từ bể dung dịch và cột nước ta dẫn ra 2 đường để đưa vào 2 đầu của sensor đo chênh
áp . A là đầu dương của sensor được nối với đường dẫn từ bể cần đo mức , B là đầu âm của
sensor được nối với đường dẫn từ cột nước .
Tại đầu A áp suất là : PA = P1 + P2
Tại đầu B áp suất là : PB = P1 + P3
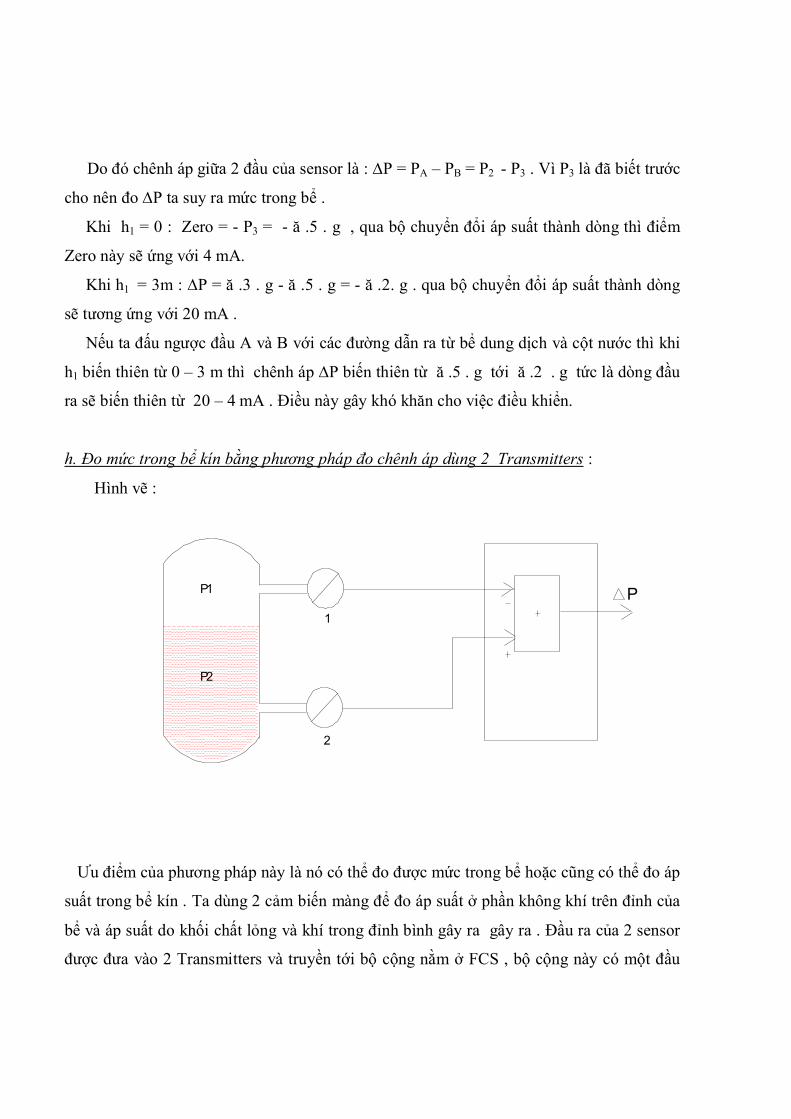
Do đó chênh áp giữa 2 đầu của sensor là : ∆P = PA – PB = P2 - P3 . Vì P3 là đã biết trước
cho nên đo ∆P ta suy ra mức trong bể .
Khi h1 = 0 : Zero = - P3 = - ă .5 . g , qua bộ chuyển đổi áp suất thành dòng thì điểm
Zero này sẽ ứng với 4 mA.
Khi h1 = 3m : ∆P = ă .3 . g - ă .5 . g = - ă .2. g . qua bộ chuyển đổi áp suất thành dòng
sẽ tương ứng với 20 mA .
Nếu ta đấu ngược đầu A và B với các đường dẫn ra từ bể dung dịch và cột nước thì khi
h1 biến thiên từ 0 – 3 m thì chênh áp ∆P biến thiên từ ă .5 . g tới ă .2 . g tức là dòng đầu
ra sẽ biến thiên từ 20 – 4 mA . Điều này gây khó khăn cho việc điều khiển.
h. Đo mức trong bể kín bằng phương pháp đo chênh áp dùng 2 Transmitters :
Hình vẽ :
P1
P2
1
2
P
Ưu điểm của phương pháp này là nó có thể đo được mức trong bể hoặc cũng có thể đo áp
suất trong bể kín . Ta dùng 2 cảm biến màng để đo áp suất ở phần không khí trên đỉnh của
bể và áp suất do khối chất lỏng và khí trong đỉnh bình gây ra gây ra . Đầu ra của 2 sensor
được đưa vào 2 Transmitters và truyền tới bộ cộng nằm ở FCS , bộ cộng này có một đầu
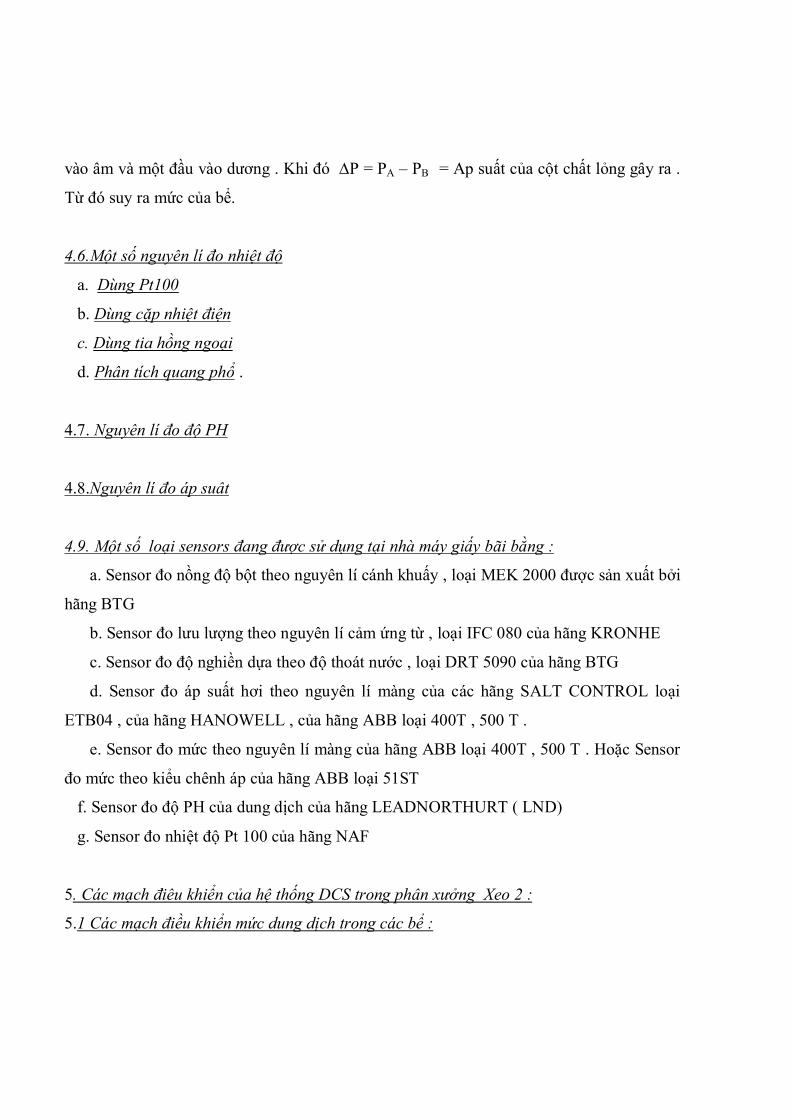
vào âm và một đầu vào dương . Khi đó ∆P = PA – PB = Ap suất của cột chất lỏng gây ra .
Từ đó suy ra mức của bể.
4.6.Một số nguyên lí đo nhiệt độ
a. Dùng Pt100
b. Dùng cặp nhiệt điện
c. Dùng tia hồng ngoại
d. Phân tích quang phổ .
4.7. Nguyên lí đo độ PH
4.8.Nguyên lí đo áp suât
4.9. Một số loại sensors đang được sử dụng tại nhà máy giấy bãi bằng :
a. Sensor đo nồng độ bột theo nguyên lí cánh khuấy , loại MEK 2000 được sản xuất bởi
hãng BTG
b. Sensor đo lưu lượng theo nguyên lí cảm ứng từ , loại IFC 080 của hãng KRONHE
c. Sensor đo độ nghiền dựa theo độ thoát nước , loại DRT 5090 của hãng BTG
d. Sensor đo áp suất hơi theo nguyên lí màng của các hãng SALT CONTROL loại
ETB04 , của hãng HANOWELL , của hãng ABB loại 400T , 500 T .
e. Sensor đo mức theo nguyên lí màng của hãng ABB loại 400T , 500 T . Hoặc Sensor
đo mức theo kiểu chênh áp của hãng ABB loại 51ST
f. Sensor đo độ PH của dung dịch của hãng LEADNORTHURT ( LND)
g. Sensor đo nhiệt độ Pt 100 của hãng NAF
5. Các mạch điêu khiển của hệ thống DCS trong phân xưởng Xeo 2 :
5.1 Các mạch điều khiển mức dung dịch trong các bể :
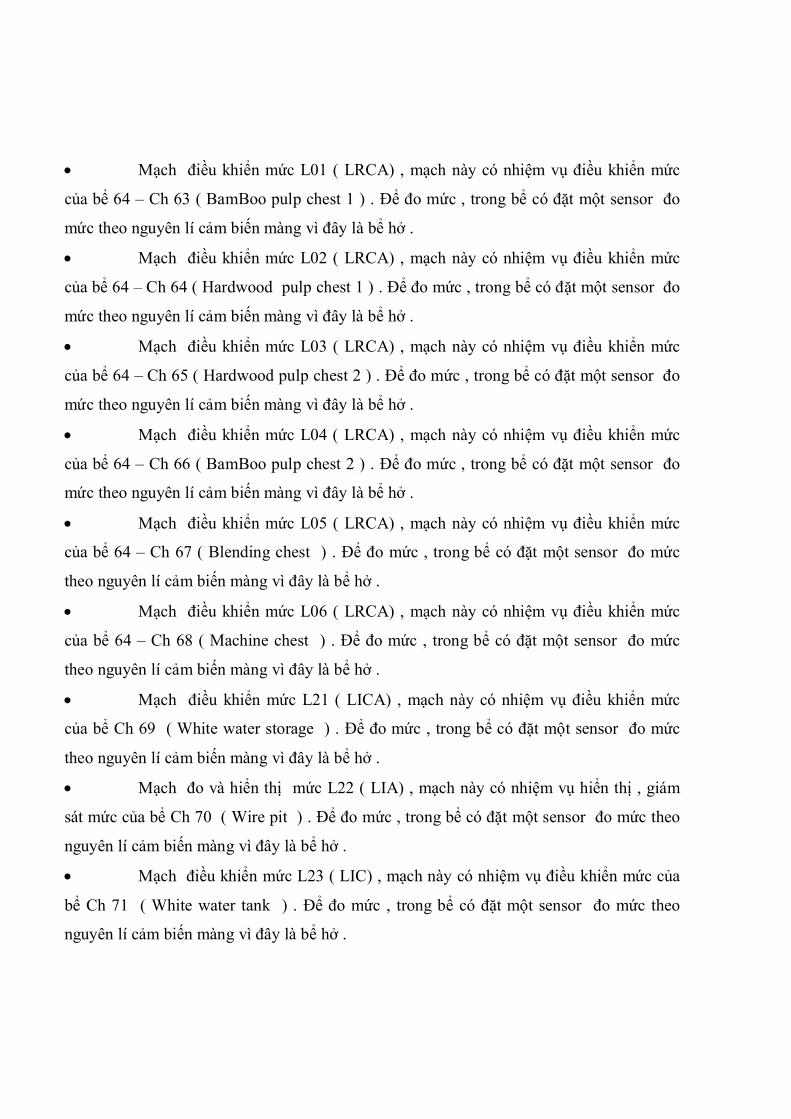
Mạch điều khiển mức L01 ( LRCA) , mạch này có nhiệm vụ điều khiển mức
của bể 64 – Ch 63 ( BamBoo pulp chest 1 ) . Để đo mức , trong bể có đặt một sensor đo
mức theo nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L02 ( LRCA) , mạch này có nhiệm vụ điều khiển mức
của bể 64 – Ch 64 ( Hardwood pulp chest 1 ) . Để đo mức , trong bể có đặt một sensor đo
mức theo nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L03 ( LRCA) , mạch này có nhiệm vụ điều khiển mức
của bể 64 – Ch 65 ( Hardwood pulp chest 2 ) . Để đo mức , trong bể có đặt một sensor đo
mức theo nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L04 ( LRCA) , mạch này có nhiệm vụ điều khiển mức
của bể 64 – Ch 66 ( BamBoo pulp chest 2 ) . Để đo mức , trong bể có đặt một sensor đo
mức theo nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L05 ( LRCA) , mạch này có nhiệm vụ điều khiển mức
của bể 64 – Ch 67 ( Blending chest ) . Để đo mức , trong bể có đặt một sensor đo mức
theo nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L06 ( LRCA) , mạch này có nhiệm vụ điều khiển mức
của bể 64 – Ch 68 ( Machine chest ) . Để đo mức , trong bể có đặt một sensor đo mức
theo nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L21 ( LICA) , mạch này có nhiệm vụ điều khiển mức
của bể Ch 69 ( White water storage ) . Để đo mức , trong bể có đặt một sensor đo mức
theo nguyên lí cảm biến màng vì đây là bể hở .
Mạch đo và hiển thị mức L22 ( LIA) , mạch này có nhiệm vụ hiển thị , giám
sát mức của bể Ch 70 ( Wire pit ) . Để đo mức , trong bể có đặt một sensor đo mức theo
nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L23 ( LIC) , mạch này có nhiệm vụ điều khiển mức của
bể Ch 71 ( White water tank ) . Để đo mức , trong bể có đặt một sensor đo mức theo
nguyên lí cảm biến màng vì đây là bể hở .

Mạch điều khiển mức L25 ( LICA) , mạch này có nhiệm vụ điều khiển mức
của bể Ch 73 ( Couch pit pulper ) . Để đo mức , trong bể có đặt một sensor đo mức theo
nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L26 ( LICA) , mạch này có nhiệm vụ điều khiển mức
của các bể Ch 74 (Wire shower water tank ) và Ch 76 ( Broke chest 1) và Filtrate tank
Ch 78 . Để đo mức , trong các bể có đặt một sensor đo mức theo nguyên lí cảm biến màng
vì đây là bể hở .
Mạch điều khiển mức L33 ( LICA) , mạch này có nhiệm vụ điều khiển mức
của bể Ch 76 ( Broke chest 1 ) . Để đo mức , trong bể có đặt một sensor đo mức theo
nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L34 ( LRA) , mạch này có nhiệm vụ đo và hiển thị mức
của bể Ch 77 ( Broke chest 2 ) . Để đo mức , trong bể có đặt một sensor đo mức theo
nguyên lí cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L35 ( LSA) , mạch này có nhiệm vụ điều khiển mức của
bể Ch 78 ( Filtrate tank ) . Để đo mức , trong bể có đặt một sensor đo mức theo nguyên lí
cảm biến màng vì đây là bể hở .
Mạch điều khiển mức L30 ( LICA) , mạch này có nhiệm vụ điều khiển mức
của bể Ch 81 ( Dry end pulper ) . Để đo mức , trong bể có đặt một sensor đo mức theo
nguyên lí cảm biến màng vì đây là bể hở . Mạch này có thể điều khiển mức trong bể theo
van đổ dung dịch vào bể hoặc theo van xả dung dịch ra khỏi bể.
Mạch điều khiển mức L31 ( LICA) , mạch này có nhiệm vụ điều khiển mức
của bể Ch 82 ,là bể chứa dung dịch hồ tinh bột phục vụ cho quá trình ép keo . Để đo mức ,
trong bể có đặt một sensor đo mức theo nguyên lí cảm biến màng vì đây là bể hở .
5.2 Các mạch điều khiển nồng độ bột trong dung dịch các bể :
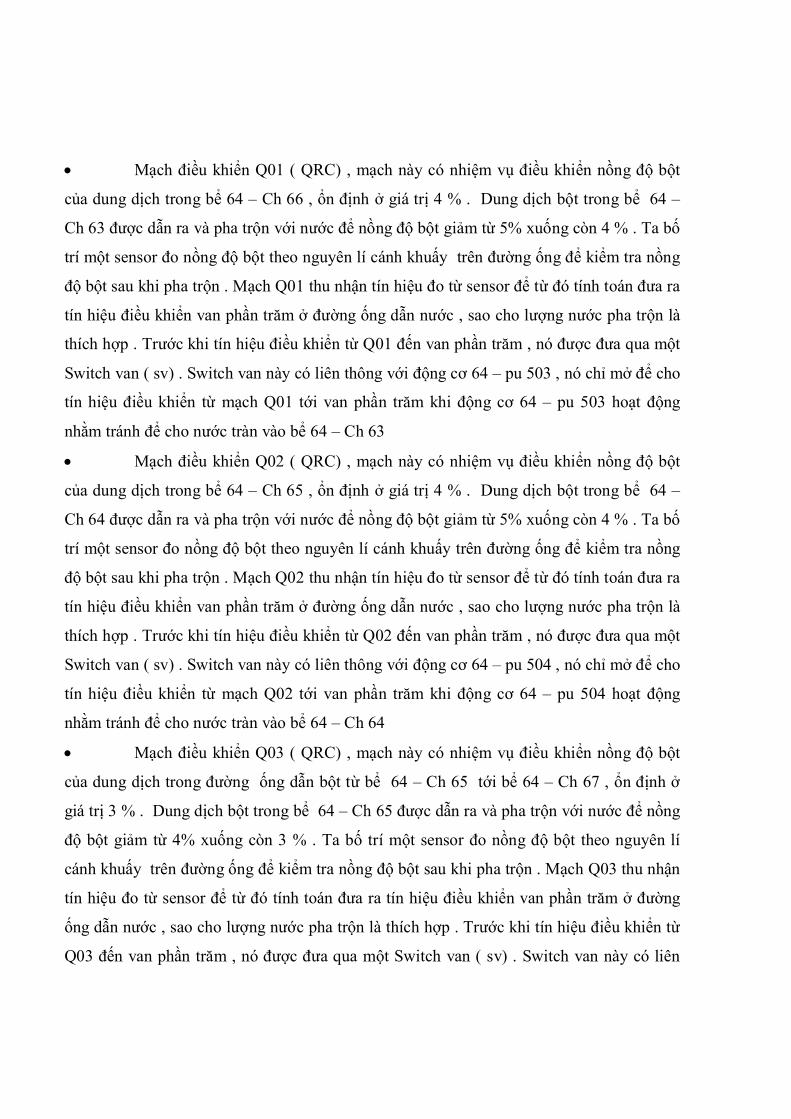
Mạch điều khiển Q01 ( QRC) , mạch này có nhiệm vụ điều khiển nồng độ bột
của dung dịch trong bể 64 – Ch 66 , ổn định ở giá trị 4 % . Dung dịch bột trong bể 64 –
Ch 63 được dẫn ra và pha trộn với nước để nồng độ bột giảm từ 5% xuống còn 4 % . Ta bố
trí một sensor đo nồng độ bột theo nguyên lí cánh khuấy trên đường ống để kiểm tra nồng
độ bột sau khi pha trộn . Mạch Q01 thu nhận tín hiệu đo từ sensor để từ đó tính toán đưa ra
tín hiệu điều khiển van phần trăm ở đường ống dẫn nước , sao cho lượng nước pha trộn là
thích hợp . Trước khi tín hiệu điều khiển từ Q01 đến van phần trăm , nó được đưa qua một
Switch van ( sv) . Switch van này có liên thông với động cơ 64 – pu 503 , nó chỉ mở để cho
tín hiệu điều khiển từ mạch Q01 tới van phần trăm khi động cơ 64 – pu 503 hoạt động
nhằm tránh để cho nước tràn vào bể 64 – Ch 63
Mạch điều khiển Q02 ( QRC) , mạch này có nhiệm vụ điều khiển nồng độ bột
của dung dịch trong bể 64 – Ch 65 , ổn định ở giá trị 4 % . Dung dịch bột trong bể 64 –
Ch 64 được dẫn ra và pha trộn với nước để nồng độ bột giảm từ 5% xuống còn 4 % . Ta bố
trí một sensor đo nồng độ bột theo nguyên lí cánh khuấy trên đường ống để kiểm tra nồng
độ bột sau khi pha trộn . Mạch Q02 thu nhận tín hiệu đo từ sensor để từ đó tính toán đưa ra
tín hiệu điều khiển van phần trăm ở đường ống dẫn nước , sao cho lượng nước pha trộn là
thích hợp . Trước khi tín hiệu điều khiển từ Q02 đến van phần trăm , nó được đưa qua một
Switch van ( sv) . Switch van này có liên thông với động cơ 64 – pu 504 , nó chỉ mở để cho
tín hiệu điều khiển từ mạch Q02 tới van phần trăm khi động cơ 64 – pu 504 hoạt động
nhằm tránh để cho nước tràn vào bể 64 – Ch 64
Mạch điều khiển Q03 ( QRC) , mạch này có nhiệm vụ điều khiển nồng độ bột
của dung dịch trong đường ống dẫn bột từ bể 64 – Ch 65 tới bể 64 – Ch 67 , ổn định ở
giá trị 3 % . Dung dịch bột trong bể 64 – Ch 65 được dẫn ra và pha trộn với nước để nồng
độ bột giảm từ 4% xuống còn 3 % . Ta bố trí một sensor đo nồng độ bột theo nguyên lí
cánh khuấy trên đường ống để kiểm tra nồng độ bột sau khi pha trộn . Mạch Q03 thu nhận
tín hiệu đo từ sensor để từ đó tính toán đưa ra tín hiệu điều khiển van phần trăm ở đường
ống dẫn nước , sao cho lượng nước pha trộn là thích hợp . Trước khi tín hiệu điều khiển từ
Q03 đến van phần trăm , nó được đưa qua một Switch van ( sv) . Switch van này có liên
thông với động cơ 64 – pu 505 , nó chỉ mở để cho tín hiệu điều khiển từ mạch Q03 tới van
phần trăm khi động cơ 64 – pu 505 hoạt động nhằm tránh để cho nước tràn vào bể 64 – Ch
65
Mạch điều khiển Q04 ( QRC) , mạch này có nhiệm vụ điều khiển nồng độ bột
của dung dịch trong đường ống dẫn bột từ bể 64 – Ch 66 tới bể 64 – Ch 67 , ổn định ở
giá trị 3 % . Dung dịch bột trong bể 64 – Ch 66 được dẫn ra và pha trộn với nước để nồng
độ bột giảm từ 4% xuống còn 3 % . Ta bố trí một sensor đo nồng độ bột theo nguyên lí
cánh khuấy trên đường ống để kiểm tra nồng độ bột sau khi pha trộn . Mạch Q04 thu nhận
tín hiệu đo từ sensor để từ đó tính toán đưa ra tín hiệu điều khiển van phần trăm ở đường
ống dẫn nước , sao cho lượng nước pha trộn là thích hợp . Trước khi tín hiệu điều khiển từ
Q04 đến van phần trăm , nó được đưa qua một Switch van ( sv) . Switch van này có liên
thông với động cơ 64 – pu 506 , nó chỉ mở để cho tín hiệu điều khiển từ mạch Q04 tới van
phần trăm khi động cơ 64 – pu 506 hoạt động nhằm tránh để cho nước tràn vào bể 64 – Ch
66
Mạch điều khiển Q05( QRC) , mạch này có nhiệm vụ điều khiển nồng độ bột
của dung dịch trong đường ống dẫn bột vào bể 64 – Ch 68 , ổn định ở giá trị 2 % . Dung
dịch bột trong bể 64 – Ch 67 được dẫn ra và pha trộn với nước và dung dịch bột giấy đứt
từ bể Ch 73 để nồng độ bột giảm từ 3% xuống còn 2 % . Ta bố trí một sensor đo nồng độ
bột theo nguyên lí cánh khuấy trên đường ống để kiểm tra nồng độ bột sau khi pha trộn .
Mạch Q05 thu nhận tín hiệu đo từ sensor để từ đó tính toán đưa ra tín hiệu điều khiển van
phần trăm ở đường ống dẫn nước , sao cho lượng nước pha trộn là thích hợp . Trước khi tín
hiệu điều khiển từ Q05 đến van phần trăm , nó được đưa qua một Switch van ( sv) . Switch
van này có liên thông với động cơ 64 – pu 507 , nó chỉ mở để cho tín hiệu điều khiển từ
mạch Q05 tới van phần trăm khi động cơ 64 – pu 507 hoạt động nhằm tránh để cho nước
tràn vào bể 64 – Ch 67
Mạch điều khiển Q22 ( QRC) , mạch này có nhiệm vụ điều khiển nồng độ bột
của dung dịch trong bể Ch 76 là bể chứa bột giấy đứt . Nước trắng được dẫn từ bể Ch 71
được đưa vào bể Ch 76 để pha trộn . Một sensor đo nồng độ bột theo nguyên lí cánh khuấy
được lắp đặt trên đường ống dẫn dung dịch bột từ bể Ch76 tới bể 64 – Ch 67. Mạch điều
khiển Q22 thu nhận tín hiệu đo từ sensor để từ đó tính toán tín hiệu điều khiển mở van
phân trăm trên đường ống dẫn nước trắng.
5.3 Các mạch điều khiển lưu lượng dung dịch bột trong các đường ống
Mạch điều khiển F01 ( FFRC) , mạch này có nhiệm vụ điều khiển lưu lượng
dung dịch trong đường ống dẫn dung dịch bột từ bể 64 – Ch 65 đưa vào bể 64 – Ch 67 .
Đây là một mạch điều khiển lưu lượng phân cấp theo kiểu tỉ lệ . Nó nhận tín hiệu đặt từ
mạch điều khiển mức L05 , sau đó điều khiển độ mở van phần trăm theo tín hiệu đặt này .
Để triệt tiêu sai lệch giữa giá trị đặt của mạch L05 và độ mở thực của van , ta bố trí một
sensor đo lưu lượng theo nguyên lí cảm ứng từ trên đường ống . Mạch F01 sẽ thu nhận tín
hiệu đo từ sensor và so sánh giá trị mở thực của van và giá trị đặt để từ đó tính toán tín
hiệu điều khiển van sao cho sai lệch này là bằng không .
Mạch điều khiển F02 ( FFRC) , mạch này có nhiệm vụ điều khiển lưu lượng
dung dịch trong đường ống dẫn dung dịch bột từ bể 64 – Ch 66 đưa vào bể 64 – Ch 67 .
Đây là một mạch điều khiển lưu lượng phân cấp theo kiểu tỉ lệ . Nó nhận tín hiệu đặt từ
mạch điều khiển mức L05 , sau đó điều khiển độ mở van phần trăm theo tín hiệu đặt này .
Để triệt tiêu sai lệch giữa giá trị đặt của mạch L05 và độ mở thực của van , ta bố trí một
sensor đo lưu lượng theo nguyên lí cảm ứng từ trên đường ống . Mạch F02 sẽ thu nhận tín
hiệu đo từ sensor và so sánh giá trị mở thực của van và giá trị đặt để từ đó tính toán tín
hiệu điều khiển van sao cho sai lệch này là bằng không .
Mạch điều khiển F03 ( FFRC) , mạch này có nhiệm vụ điều khiển lưu lượng
dung dịch trong đường ống dẫn dung dịch bột từ bể Ch 76 đưa vào bể 64 – Ch 67 . Đây là
một mạch điều khiển lưu lượng phân cấp theo kiểu tỉ lệ . Nó nhận tín hiệu đặt từ mạch điều
khiển mức L05 , sau đó điều khiển độ mở van phần trăm theo tín hiệu đặt này . Để triệt tiêu
sai lệch giữa giá trị đặt của mạch L05 và độ mở thực của van , ta bố trí một sensor đo lưu
lượng theo nguyên lí cảm ứng từ trên đường ống . Mạch F03 sẽ thu nhận tín hiệu đo từ
sensor và so sánh giá trị mở thực của van và giá trị đặt để từ đó tính toán tín hiệu điều
khiển van sao cho sai lệch này là bằng không .
Mạch điều khiển F21 ( FRC) , mạch này có nhiệm vụ điều khiển lưu lượng
dung dịch trong đường ống dẫn từ bể 64 – Ch 68 tới bể Ch 70 . Mạch này thu nhận tín hiệu
từ sensor đo lưu lượng theo nguyên lí từ tính được lắp trên đường ống để từ đó điều khiển
lưu lượng trong đường ống phục vụ cho việc pha trộn dung dịch bột với nước tại bể Ch 70
, sao cho nồng độ bột giảm từ 2% xuống chỉ còn 0,8 – 1 % .
Mạch điều khiển F ( FFRC) , mạch này có nhiệm vụ điều khiển lưu lượng trong
đường ống dẫn dung dịch chất phụ gia AKD vào pha trộn với dung dịch bột tại bể Ch 70
Mạch điều khiển F ( FCRI) , mạch này có nhiệm vụ điều khiển lưu lượng trong
đường ống dẫn dung dịch chất phụ gia BENTONITE vào pha trộn với dung dịch bột trước
khi đi vào hòm phun bột tổng , phun lên đầu lưới định hình tờ giấy.
5.4 Các mạch điều khiển áp suất trong các đường ống :
Mạch điều khiển P52 ( PICA) , mạch này có nhiệm vụ điều khiển áp suất trong
đường ống dẫn nước trắng ra từ bể Ch 71 , phục vụ cho việc pha trộn bột trong các bể ,
các công đoạn sàng làm sạch . Mạch P52 sẽ thu nhận tín hiệu đo từ sensor đo áp suất theo
nguyên lí màng được gắn trên đường ống sau đó tính toán điều khiển độ mở van phần
trăm.
Mạch điều khiển P49 ( PICA) , mạch này có nhiệm vụ điều khiển áp suất trong
đường ống thải nước bởi các bơm chân không. Một sensor đo áp suất trong đường ống theo
nguyên lí cảm biến màng , mạch P49 nhận tín hiệu đo từ sensor và đưa ra tín hiệu điều
khiển van phần trăm.
Mạch điêu khiển P72 ( PIC) , mạch này điều khiển áp suất hơi lạnh để vào làm
mát trong các lô sấy .
5. 5 . Các mạch điều khiển độ nghiền :
Phân xưởng Xeo của công ty giấy Bãi Bằng mới được trang bị 2 mạch điều khiển
độ nghiền , để tăng chất lượng của sản phẩm . Nhiệm vụ của 2 mạch điều khiển này
là thu nhận tín hiệu đo từ 2 đầu đo độ nghiền của 2 máy nghiền để từ đó điều khiển
trục nghiền của máy nghiền quay và ở vị trí thích hợp
6.6 . Nhận xét :
Trong tất cả các mạch điều khiển trong phân xưởng Xeo , thì 2 mạch điều khiển L05
của hệ thống DCS và mạch F21 của hệ thống điều khiển QCS giữ vai trò đặc biệt quan
trọng. Nó liên quan chặt chẽ tới chất lượng đầu ra của sản phẩm . Do đó ta phải luôn giữ nó
làm việc ở độ chính xác cao.
Mạch điều khiển L05 là một mạch điếu khiển mức của bể 64 – Ch 67 ( bể Blending
chest ) . Bể này là nơi pha trộn 3 loại bột là : bột gỗ cứng , bột tre nứa , bột giấy đứt với 3
loại phụ gia là Clay, Alum, và nhựa thông. Mạch L05 sẽ thu nhận tín hiệu đo mức từ
sensor đặt tại bể , từ đó xử lí tính toán và đưa ra tín hiệu làm điểm đặt cho 6 mạch điều
khiển F01 , F02 , F03 và 3 bộ điều khiển ở các đường ống dẫn phụ gia. Sáu tín hiệu phần
trăm làm điểm đặt từ mạch L05 cho các mạch điều khiển phải có tổng bằng 1.
Mạch điều khiển F21 có nhiệm vụ điều khiển áp suất trong hòm phun bột tổng , phun
bột lên lưới định hình tờ giấy . Chất lượng điều khiển của nó liên quan chặt chẽ đến định
lượng của tờ giấy.
Tài liệu tham khảo .
1. Thiết kế kĩ thuật trên hệ DCS CENTUM 3000
Th.S Bùi Đăng Thảnh .
2. Hệ thống điều khiển phân tán CS 3000 - YOKOGAWA
Phòng thí nghiệm tự động hoá , trường đại học Bách Khoa Hà Nội
3. Tìm hiểu hệ thống điều khiển chất lượng QCS của phân xưởng Xeo
K.S Khuất Bá Dương .
4. Công nghệ sản xuất giấy.
5. Mạng truyền thông công nghiệp
Hoàng Minh Sơn.
6. Kĩ thuật đo lường các đại lượng vật lí.
Phạm Thượng Hàn , Nguyễn Trọng Quế , Nguyễn Văn Hoà
Nguyễn Thị Vân .
7. Các bộ cảm biến .
Khoa vật lí kĩ thuật , trường đại học Bách Khoa Hà Nội .
8. Các bản vẽ kĩ thuật , sơ đồ sản xuất của công ty giấy Bãi Bằng.
Mục lục
Lời nói đầu 1
Phần I : Giới thiệu chung về công ty giấy Bãi Bằng.................4
I.. Giới thiệu chung về công ty Bãi Bằng .......................................4
II . Tổng quan về hệ thống sản xuất của công ty giấy Bãi Bằng .....5
phần II : Giới thiệu chung về công nghệ sản xuất giấy ............7
I. Công đoạn xử lí nguyên liệu ........................................................7
II. công đoạn xử lí bột .....................................................................7
1. Công đoạn nấu bột......................................................................7
2. Công đoạn rửa sàng ...................................................................8
3. Công đoạn tẩy trắng bột ............................................................8
4. Công đoạn Xeo...........................................................................8
4.1. Hòm phun bột và sự hình thành tờ giấy...................................8
4.2-Bộ phận ép................................................................................9
4.3-Bộ phận sấy............................................................................10
4.4- Bộ phận ép quang .................................................................11
4.5- Bộ phận cuộn ........................................................................11 phần III : Giới
thiệu chung về hệ thống dây chuyền sản xuất trong phân xưởng Xeo 2
.........................................................12 Phần IV : Các giải pháp điều khiển đang được ứng
dụng trong phân xưởng Xeo .....................................................................15
I.. Hệ thống điều khiển chất lượng QCS.........................................15
1. Cấu hình của hệ thống QCS ....................................................15
2. Chức năng và cấu hình của hai trạm vận hành OS .................16
2.1 Cấu hình phần cứng ..............................................................16
2.2 Phương thức truy nhập MB 300 .............................................16
2.3 Cấu hình phần mềm ..............................................................17
2.4 Chức năng của hai trạmvận hành OS .....................................18
3. Chức năng và cấu hình của hai trạm Master piece 200/1.........18
4. Chức năng và cấu hình của trạm Smart Weight Profiler (SWP)
5. Chức năng và cấu hình của trạm kĩ thuật EWS ......................20
6 . Đặc trưng điều khiển của hệ thống QCS ................................21
7. Nhiệm vụ điều khiển của hệ thống QCS.................................21
8. Các mạch điều khiển của hệ thống QCS .................................24
II. Các bộ điều khiển PLC ...........................................................27
Phần V : Giải pháp điều khiển DCS cho phân xưởng xeo....28
I. Khỏi niệm chung về hệ điều khiển phõn tỏn DCS.....................28
1. Cấu trúc chung của mọi hệ điều khiển phân tán ....................28
2 .Hệ thống mạng trong hệ thống điều khiển phân tán...............31
2.1. Các mạng I/O .......................................................................31
2.2. Mạng điều khiển...................................................................32
2..3. Mạng diện rộng của nhà máy...............................................33
2. 4.Kiểu mạng .............................................................................33
II . Hệ thống điều khiển phân tán CENTUM CS3000...................34
III. Giải pháp DCS đang được áp dụng trong phân xưởng Xeo......43
1. Giới thiệu về hệ thống điều khiển DCS của phân xưởng ........43
2. Chức năng của hệ thồng điều khiển DCS ở phân xưởng .........45
3. Hệ thống các điểm đo của DCS ...............................................48
4. Nguyên lí đo một số đại lượng cơ bản .....................................48
4.1 .Các nguyên lí đo nồng độ .....................................................49
4.2 . Các nguyên lí đo độ nghiền .................................................50
4.3. Các nguyên lí đo lưu lượng ...................................................58
4.4.Đo lưu lượng bằng cách đo độ giảm áp .................................68
4.5.Nguyên lí đo mức trong các bể chứa ......................................72
4.6.Một số nguyên lí đo nhiệt độ ..................................................72
4.8.Nguyên lí đo áp suất ...............................................................72
4.9. Một số loại sensors đang được sử dụng tại nhà máy giấy bãi
Bằng .......................................................................................72
5. Các mạch điêu khiển của hệ thống DCS trong phân xưởng Xeo
thứ 2 ....................................................................................... ..73
5.1 Các mạch điều khiển mức dung dịch trong các bể ..................73
5.2 Các mạch điều khiển nồng độ bột trong dung dịch các bể ....74
5.3 Các mạch điều khiển lưu lượng dung dịch bột trong các đường
ống ........................................................................................76
5.4 Các mạch điều khiển áp suất trong các đường ống ................77
5. 5 . Các mạch điều khiển độ nghiền ..........................................78
6.6 . Nhận xét ...............................................................................78
Tài liệu tham khảo .............................................79





























