Embed Size (px)
Citation preview

Linearity Studies of the TileCal detector
PMTs of ATLAS/LHC experiment, with
the Laser monitoring system
by
Bruno Miguel Leonardo Galhardo
Dissertation submitted in partial fulfillment of the requirements for the
Masters Degree in Nuclear Particles and Physics
in the
Faculdade de Ciencias e Tecnologia da Universidade de Coimbra
Departamento de Fısica
Supervisor: Professor Doutor Joao Carlos Lopes Carvalho
July 2010

UNIVERSIDADE DE COIMBRA
Abstract
Faculdade de Ciencias e Tecnologia da Universidade de Coimbra
Departamento de Fısica
Masters Degree in Nuclear Particles and Physics
by Bruno Miguel Leonardo Galhardo
An important parameter of the performance of a detector is its linear response. In
TileCal, an hadron calorimeter of scintillating tiles, the light is transmitted by optical
fibers wavelength shifting to be readout by photomultiplier tubes (PMT). They must
have a response that increases linearly with the intensity of light received, which is
proportional to the energy deposited by particles in the calorimeter. To measure the
linearity of the PMT one uses a laser system that sends both a well-defined quantity of
light, monitored by PMT and photodiodes installed inside the laser box, to all of the
approximately 10 000 PMT in TileCal. In this study was developed software for data
analysis, using the ROOT program, to study the linearity of the response of the PMTs.

UNIVERSIDADE DE COIMBRA
Abstract
Faculdade de Ciencias e Tecnologia da Universidade de Coimbra
Departamento de Fısica
Masters Degree in Nuclear Particles and Physics
by Bruno Miguel Leonardo Galhardo
Um parametro importante para a medida do desempenho de um detector e a sua lineari-
dade de resposta. No TileCal, um calorımetro hadronico de telhas cintilantes, a luz de
cintilacao e transmitida por fibras opticas, com mudanca do comprimento de onda, para
leitura por tubos fotomultiplicadores (PMT). Estes tem de ter uma resposta que au-
menta linearmente com a intensidade de luz recebida, a qual sera proporcional a energia
depositada pelas partıculas no calorımetro. Para medir a linearidade dos PMT recorre-
se a um sistema laser que envia, simultaneamente, uma quantidade bem definida de luz,
monitorizada por PMT e fotodıodos instalados dentro da caixa do laser, para todos os
cerca de 10000 PMT do TileCal. Neste trabalho desenvolveu-se software de analise de
dados, recorrendo ao programa ROOT, para o estudo da linearidade de resposta dos
PMT.

Acknowledgements
First of all i would like to thank my supervisor, Joao Carvalho, for his outstanding
guidance and dedication. I also want to thank my office colleagues and friends Susana
e Ines for their availability in helping me.
A big thanks to Miguel, for his huge help and hospitality in Switzerland, without it, i
would had a hard time adapting there.
I thank all my friends for for all the fun, fellowship and motivation especially Angela for
her true friendship, support and also some patience.
Finally i would like to thank my family for their continual and unconditional support
and affection.
iii

Contents
Abstract i
Resumo ii
Acknowledgements iii
List of Figures vi
List of Tables viii
1 Introduction 1
2 ATLAS Detector 3
2.1 LHC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 ATLAS Detector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.1 Inner Detector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.2 Calorimeters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.3 Muon spectrometer . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.4 Magnet system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.5 Trigger and data acquisition systems . . . . . . . . . . . . . . . . . 11
2.2.6 GRID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 TileCal and its calibration 13
3.1 Calibration of TileCal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.1 Cesium System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.1.2 LASER system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.2.1 LASER box . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.2.2 Light Distribution System . . . . . . . . . . . . . . . . . 18
3.1.3 CIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Linearity studies using one LASER intensity and different wheel posi-tions 21
4.1 PMT1 vs diode 1 as references . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2 rms vs gaussian error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3 Different intensities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
iv

Contents v
5 Linearity studies using a single filter wheel position and different in-tensity runs 33
5.1 PMTs vs PMT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.1.1 Linearity of the PMTs in the LASER box . . . . . . . . . . . . . . 34
5.1.2 Comparing runs with the same intensity . . . . . . . . . . . . . . . 36
5.1.3 Different intensities with temperature . . . . . . . . . . . . . . . . 38
5.2 Using diode 4 as reference . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.3 Using the 1st PMT of the TileCal as reference . . . . . . . . . . . . . . . 40
5.4 Using the 1st PMT of the same fiber . . . . . . . . . . . . . . . . . . . . . 40
6 Conclusions 44
Bibliography 45

List of Figures
2.1 LHC acceleration stages . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Pseudorapidity Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 ATLAS detector scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4 Inner Detector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.5 Calorimeter sub-detectors . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.6 Muon spectrometer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.7 Magnet system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1 Module of TileCal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Section of a TileCal Module . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3 Hardware calibration chain . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4 Cesium passage through the cells . . . . . . . . . . . . . . . . . . . . . . . 16
3.5 The Laser box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.6 Beam expander . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.7 The light distribution system . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.8 Calibration event during a gap . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1 Example of a gaussian fit . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.2 Attenuation factors histograms . . . . . . . . . . . . . . . . . . . . . . . . 23
4.3 Linearity Plots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.4 χ2/ndf comparison between 1 run fit and 3 run fit . . . . . . . . . . . . . 24
4.5 χ2 probability comparison between 1 run fit and 3 run fit . . . . . . . . . 24
4.6 χ2probability comparison using as references diode 1 and PMT1 . . . . . 26
4.7 χ2 probability comparison using rms error and gaussian ones . . . . . . . 27
4.8 15k run histograms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.9 20k run histograms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.10 25k run histograms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.11 15k run histograms - set 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.12 20k run histograms - set 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.1 Example of a fit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.2 PMT vs PMT1 plots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.3 Linearity of the PMTs in the LASER box . . . . . . . . . . . . . . . . . . 36
5.4 Fluctuations in the Signal for the same intensity . . . . . . . . . . . . . . 36
5.5 Temperature evolution in consecutive runs . . . . . . . . . . . . . . . . . . 37
5.6 Signals for PMT1 and PMT0 versus time for intensity 14k . . . . . . . . . 37
5.7 Signals for PMT1 and PMT0 versus the temperature for intensity 14k . . 37
5.8 Correlation between the ratios and temperature . . . . . . . . . . . . . . . 38
vi

List of Figures vii
5.9 Linearity plot for the 1st PMT of the Tilecal . . . . . . . . . . . . . . . . 38
5.10 Change in temperature along the runs . . . . . . . . . . . . . . . . . . . . 39
5.11 PMT vs diode 4 plots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.12 PMT vs 1st PMT of the TileCal plots . . . . . . . . . . . . . . . . . . . . 41
5.13 PMT vs 1st PMT of the fiber plots . . . . . . . . . . . . . . . . . . . . . . 42
5.14 Chi-square probability excluding the 1st point . . . . . . . . . . . . . . . . 43

List of Tables
2.1 General Detector Performance . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Filter wheel attenuation factors . . . . . . . . . . . . . . . . . . . . . . . . 17
6.1 Summary of the results of the various methods . . . . . . . . . . . . . . . 44
viii

Chapter 1
Introduction
At present, all the observable phenomena can be explain by four fundamental interac-
tions: the gravitation has a very weak intensity and acts on all matter; its importance is
taken into account on large systems but is negligible in particle physics (its incorporation
in particle physics remains a problem unsolved by theoretical physics). The electromag-
netic interaction is responsible for the cohesion of the atoms and a large portion of the
phenomena observable at our scale; the strong and weak interactions are responsible for
the cohesion of the atomic nuclei and radioactivity, respectively. The ultimate goal of
particle physics is to find a theory that explains and unifies all these interactions.
The Standard Model is a theory comprising: first, the electroweak theory (electromag-
netic interaction and weak interaction) and, secondly, the strong interaction. To this
day, all observed experimental particle physics phenomenon are explained by this the-
ory. All the particles in this theory (3 families/generations of fermions with 2 quarks, a
lepton and its neutrino, and 4 boson mediators) were found by experiments except one,
the Higgs boson.
With the purpose of testing the Standard Model and eventually alternative models
beyond the Standard Model, the Large Hadron Collider (LHC), was built at CERN
(European Organization for Nuclear Research). It is a proton-proton collider and will
reach a maximum energy of 14 TeV. In order to study the particle collisions, four detec-
tors are placed on LHC. One of them is ATLAS (A Toroidal LHC ApparatuS) and its
sub-detector TileCal is the one of interest in this work.
In order to provide the best possible physics input, the TileCal response must be perfectly
understood and optimized, so that the difference between the energy of the particle and
the energy we are reconstructing should be as small as possible. This is the role of the
calibration.
1

Chapter 1. Introduction 2
One of 3 systems used to calibrate the hardware in TileCal is the LASER system.
It is used to calibrate and monitor all 9852 photomultipliers tubes (along with their
associated electronics) within the detector. The focus of this work will be an analysis of
the linearity response of those TileCal PMTs using this LASER system.
This thesis is structured as follows. In the second chapter, the accelerator (LHC) and the
ATLAS detector are presented. On the third chapter is described the calibration tools,
in particular the LASER system used in TileCal. On the fourth chapter is presented the
analysis and results of the linearity of the PMTs using the LASER system with runs
having only one intensity at a time. On chapter five is shown the analysis and results,
this time using different intensity runs. Lastly, chapter 6 is left for the conclusions and
comments about this study.

Chapter 2
ATLAS Detector
2.1 LHC
With the purpose of studying the physics of particles under the framework of the Stan-
dard Model and other models beyond the Standard Model, the LHC was built. It is
a proton-proton collider located at CERN, near Geneva, Switzerland. This accelerator
will allow to access masses in the interval of a few GeV and several TeV. The motivation
behind the construction of this machines are the following:
• Comprehension of the origin of masses of the particles: currently, the Standard
Model explains this by the Higgs Mechanism which assumes a neutral boson called
Higgs boson. This particle could have a mass of 120GeV or all the way to 1TeV.
• Physics beyond the Standard Model: although the Standard Model gives predic-
tions verified to a level of 0.1%, some of its theoretical flaws (unification of coupling
constants, number of families, ...) suggest that this model is an approximation,
at low energy, of some more general model. So, the LHC will allow to observe
manifestations of these eventual new theories until energies of order of a TeV.
• Answering some open questions such as: are quarks and leptons the elementary
particles? What is the origin of the asymmetry between matter and anti-matter?
What is the origin of confinement of quarks?
• Precision measurements (Top mass, W width): due to the high luminosity of
LHC, measurements involving a large statistics can be made. They will test more
thoroughly the predictions of the Standard Model.
The accelerator was built in the LEP (Large Electron Positron collider) tunnel and
is 27km long and is placed 50-175m underground. The particles are accelerated by
3

Chapter 2. ATLAS Detector 4
intense electric fields. An intense magnetic field of 8.4T will maintain the trajectory
of the protons in the ring. The acceleration of protons will be made in several stages
of accelerations, in various accelerators, to achieve the nominal energy. This chain is
represented in 2.1. The Linac2 will accelerate protons up to an energy of 50MeV. The
Booster (PSB) will reach an energy of 1GeV. The protons will be sent to PS bringing
their energy to 26GeV. Finally, the SPS will provide, as output, a beam of protons of
450GeV, which is injected into the LHC and where it reaches its nominal energy of
7TeV.
Figure 2.1: LHC acceleration stages
Four main experiments are installed at LHC: ATLAS and CMS (Compact Muon Solenoid)
are generalist experiments aiming to discover the Higgs boson or evidences of supersym-
metry among other things. Then there is ALICE (A Large Ion Collider Experiment)
which is focused in the study of heavy ion collisions (Pb-Pb). Its researches will search

Chapter 2. ATLAS Detector 5
for evidence of a plasma of quarks and gluons. Lastly is LHCb which is dedicated to the
study o the violation of CP symmetry.
2.2 ATLAS Detector
The ATLAS detector is constituted of a set of sub detectors of cylindrical shape placed
around the beam pipe. The sub-detectors form layers around the collision point. In this
way, the particles emitted transversely pass through three types of sub-detectors:
• The inner tracker: it measures charged particles tracks and their momentum. The
curvature of the tracks is obtained thanks to the magnetic field of 2T produced
by a magnetic solenoid. It allows the determination of primary and secondary
vertices.
• The Calorimeters: two types of calorimeters are being used, the electromagnetic
followed by the hadronic. The electromagnetic calorimeter was designed to mea-
sure the energy of charged particles and photons through the electromagnetic in-
teraction, while the hadronic calorimeter measures the energy of hadrons that
interact via the strong interaction.
• The muon spectrometer: identifies and measures the momentum of muons. The
curvature of the trajectory of these particles is obtained by a toroid magnet.
Besides this, there are the two magnetic systems: a solenoid surrounding the Inner
Detector and the toroid magnets. The toroid magnets surround the calorimeters and
generate the magnetic field for the muon spectrometer.
One important variable used in ATLAS is the pseudo-rapidity, and is defined as
η = −ln(tan
(θ
2
)) (2.1)
Where θ is the polar angle (the azimuthal angle is φ). η is then related with the angle
between the object momentum and the beam pipe (z-axis). Its variation with θ is plotted
on Figure 2.2.
To achieve its goals, the detector needs to fulfill a set of requirements[1]:
• Fast electronics, resistant to the radiation, and high granularity to reduce events
overlap.

Chapter 2. ATLAS Detector 6
Figure 2.2: Pseudorapidity (η) as a function of the polar angle (θ).
• Large acceptance in pseudo-rapidity, with a very large coverage in the azimuthal
angle.
• Good resolution in the charged particles momentum and reconstruction efficiency
in the Inner Detector. Pixel detectors close to the interaction point are required
for an efficient triggering and offline tagging of τ ’s and b-jets by observation of
secondary vertices.
• An electromagnetic calorimeter with an excelent capability of identification and
measurement of photons and electrons and an accurate hadronic calorimeter to
measure jet and missing transverse energy with precision.
• An independent muon identification with good momentum resolution to determine
unambiguously the charge of high pT muons.
• A triggering system for low pT particles with sufficient background rejection to
allow the observation of most of the physics processes of interest at the LHC.
The structure of the detector is shown on Figure 2.3 and the general performance goals
of ATLAS detector are on Table 2.1 [1]
2.2.1 Inner Detector
The inner detector determines the trajectories of the charged particles, their momentum
and the primary and secondary vertices. It allows the identification of electrons, labeling
of b-jets, τ leptons and the rejection of light jets. The objectives in terms of performance
of the sub-detector are [2]:

Chapter 2. ATLAS Detector 7
Figure 2.3: ATLAS detector scheme
component Resolution η trigger (η)
Tracking σpT /pT = 0.05%× pT ⊕ 1% |η| < 2.5 -
EM calorimeter σE/E = 10%√E ⊕ 0.7% |η| < 3.2 |η| < 2.5
Hadronic calorimetry
barrel and end-cap σE/E = 50%√E ⊕ 3% |η| < 3.2 |η| < 3.2
forward σE/E = 100%√E ⊕ 10% |η| < 4.9 |η| < 4.9
Muon spectrometer σpT /pT = 10%@pT = 1TeV |η| < 2.7 |η| < 2.4
Table 2.1: General Detector Performance
• Reconstruction of tracks for |η| < 2.5.
• The angles θ are measured with a precision of, at least, 2 mrad.
• The primary vertex is found along the z axis with an accuracy better than 1mm.
• The identification of electrons with pT ≥ 7 GeV is greater than 90%.
• Identification of photons combined with the electromagnetic calorimeter
• Identification of jets from b-quark.
The Inner Detector has three parts, the Pixel Detector, the Semiconductor Tracker
(SCT) and the Transition Radiation Tracker (TRT). All contained on a 2T magnetic field
that bends charged particles trajectory to allow measurement of the particles momenta
(Figure 2.4).

Chapter 2. ATLAS Detector 8
Figure 2.4: Inner Detector
2.2.2 Calorimeters
There are two calorimeters in the ATLAS detector: the electromagnetic and the hadronic,
covering the regions |η| < 3.2 and |η| < 4.9, respectively (Figure 2.5). The electromag-
netic calorimeter allows a precise measure of the energy and position of the electrons
and photons that interact through electromagnetic force while the hadronic absorbs the
energy of particles that interact through the strong force, after crossing the electro-
magnetic calorimeter. The hadronic calorimeter is meant to detect the particle shower
resulting from the hadronization of the quarks, also known as jet, allowing to measure
the energy of the original particle after calibration.
The EM calorimeter [3, 4] is a sampling calorimeter made of layers of lead (used as the
passive material). Between the layers, liquid argon (LAr) is used as the active material.
The accordion geometry provides complete φ symmetry without azimuthal cracks. It is
divided into three regions: the barrel (|η| < 1.475) and two end-caps (1.375 < |η| < 3.2).
It has the following properties:
• An angular coverage as large as possible to collect a maximum of rare events and
to measure the missing energy.
• An excellent resolution on the energy in the order of 1%.
• A precise measurement of the direction of electromagnetic showers.
• An excellent separation of γs.

Chapter 2. ATLAS Detector 9
Figure 2.5: Calorimeter sub-detectors
The hadronic calorimeter is composed by three sub-detectors: the tile calorimeter (Tile-
Cal), the LAr hadronic end-cap calorimeter (HEC) and the LAr forward calorimeter
(FCal). The TileCal [5, 6] is a sampling calorimeter using steel as the absorber and
scintillator as the active medium. It is located in the region |η| < 1.7, behind the LAr
EM calorimeter, and it is subdivided into a barrel central region (|η| < 1.0) and two
extended barrels (0.8 < |η| < 1.7). The light produced in the scintillating tiles is col-
lected at the edges of each tile using two wavelength shifting fibers that conduct the
light to photomultipliers. The HEC covers the region 1.5 < |η| < 3.2 overlapping the
forward calorimeter. Each HEC consists of two wheels with a radius of 2.03m, each with
32 modules, and is divided in two longitudinal segments. Finally, the FCal is located
at 4.5m from the interaction point covering the region 3.1 < |η| < 4.9 with the main
purpose of minimising the loss of energy and reduce background radiation levels in the
muon spectrometer. FCal and HEC use cooper as the absorber and LAr as the active
material. Its properties are:
• The identification of jets, the measurement of their energy and their direction.
• Good coverage in η to measure precisely the missing transverse energy.
• A good granularity.
• A linear response in energies for |η| < 3.

Chapter 2. ATLAS Detector 10
2.2.3 Muon spectrometer
The muon spectrometer is the last layer of ATLAS detector, has a cylindrical shape and
measures 22m of diameter and 46m long. It has a full coverage in the region |η| < 2.7,
with the exception of a region around η = 0, where a 300mm gap is present, allowing for
the passage of the services for the ID detector, solenoid and calorimeters. This gap leads
to a significant degradation of the muon reconstruction efficiency in that region. The
Superconductors generate a magnetic field perpendicular to the trajectory of muons.
The spectrometer measures the deviation to determine the momentum of muons.
To efficiently identify and measure muons, the Muon Spectrometer is composed by four
different tracking detector technologies: Monitored Drift Tubes (MDT) and Cathode
Strip Chambers (CSC) precision detectors in the barrel and end-cap regions; Resistive
Plate Chambers (RPC) and Thin Gap Chambers (TGC) that provide fast trigger signals
in the barrel and end-cap regions (Figure 2.6).
Figure 2.6: Muon spectrometer
The goals of this sub-detector are:
• A good resolution on the measurement of the transverse momentum for 5GeV<E
<1 TeV.

Chapter 2. ATLAS Detector 11
• A good reconstruction of the muons tracks.
• Good angular coverage (|η| < 3).
• Ability to function in standalone mode (without the tracker).
2.2.4 Magnet system
Apart from the three main sub-detectors, ATLAS, has a system of four large super-
conducting magnets with the purpose of bending the charged particles produced in the
events, allowing to measure their momentum and charge sign. The ATLAS magnet sys-
tem consists of a solenoid, aligned with the beam axis, providing a 2T axially symmetric
magnetic field for the inner detector; a barrel and two end-cap toroids, which produce a
toroidal magnetic field of 0.5T and 1T, respectively, for the muon detectors. Figure 2.6
shows the geometry of the magnet system.
Figure 2.7: Magnet system
2.2.5 Trigger and data acquisition systems
The selection of events in ATLAS is done on three levels of trigger, based on the signa-
tures of high-pT particles and missing transverse energy. Each level allows to refine the
selection in order to pass from a frequency of events of 109Hz to a frequency of storage
of 100Hz. The trigger will therefore provide a factor of rejection of about 107.

Chapter 2. ATLAS Detector 12
The level 1 trigger will select high pT muons, electrons, photons, jets and τ leptons
decaying in hadrons. The decision time of 2µs includes the transmission of signals
between the detector and the trigger electronics. After the 1st has accepted an event,
the data is read out, formatted and stored in buffers, being available to the next levels.
The level 2 trigger uses about 2% of total event data at full granularity and precision,
and it will reduce the trigger rate to 3.5kHz. At this stage, the processing time for an
average event is 10ms. At final stage the rate will be reduced to 100Hz.
2.2.6 GRID
The LHC computing Grid is a distribution network designed to handle the massive
amounts of data produced by the Large Hadron Collider (LHC). It incorporates both
private fiber optic cable links and existing high-speed portions of the public Internet.
The data stream from the detectors provides approximately 300 GB/s, which is filtered
for ‘interesting events’, resulting in a ‘raw data’ stream of about 300 MB/s. This makes
more than 1PB of data per year. The storage and offline reconstruction of this amount
of data require the use of a large storage and computing resources. The Grid sites
are organized in Tiers: the Tier-0 is located at CERN (where the data is produced)
and it is connected via high-speed networks to eleven Tier-1 sites (located in different
countries), which will store the output of event reconstruction. The Tier-1 centres
will make data available to more than 150 Tier-2 centres, each consisting of one or
several collaborating computing facilities, which can store sufficient data and provide
adequate computing power for specific analysis tasks. Individual scientists will access
these facilities through Tier-3 computing resources, which consist of local clusters (or
even individual computers).

Chapter 3
TileCal and its calibration
The TileCal is a sub-detector of ATLAS as explained in the previous chapter. It is
made of three aligned barrels. Both barrels on the exterior are the extended barrels.
They measure 2.91m in length and cover the following range of pseudo-rapidity: 0.8 <
|η| < 1.7. The central barrel is called the Long Barrel and is 5.64m long, covering the
pseudo-rapidity range |η| < 1. All three sections are subdivided into 64 independent
modules. Each module covers a portion of 2π/64 angle in φ that gives the granularity
in φ. Radially, the modules are divided into three layers (Figure 3.1): A, BC and D.
They correspond, respectively, at 1.4, 3.9 and 1.8 interaction length. The granularity
∆η×∆φ of the TileCal is 0.1×0.1 for the first two layers and 0.2×0.1 for the third layer.
Figure 3.1: Different layers of a module of TileCal
The calorimeter measures only a fraction of the energy deposited by the incoming parti-
cles (it is a sampling calorimeter). The absorber plate is iron, while the active medium is
constituted of scintillating tiles. The particles deposite a fraction of their energy in the
scintillating tiles, which is converted into light. The light is transported by wavelength
shifting fibers, placed on each side of scintillating tiles. The absorption spectrum of
13

Chapter 3. TileCal and its calibration 14
the fiber is adapted to the wavelength of light produced in the scintillating tiles. The
emission spectrum has been tailored to the absorption efficiency of the Photomultipli-
ers (PMTs). PMTs are placed on the other end of the fiber converting the light into
electrical signals. The charge collected by each PMT is then digitized and passed to the
ATLAS readout system, allowing to double reading each cell. The scintillating tiles are
placed in a plane perpendicular to the beam, and this geometry allows for the connection
of optical fibers on the side outside of the module. Figure 3.2 represents a section of a
TileCal module.
Figure 3.2: Section of a TileCal Module
3.1 Calibration of TileCal
In order to reach good physics analysis, the difference between the energy of the particle
and the energy we are reconstructing should be as small as possible. This is the role of
the calibration which can be made in two ways[11]:

Chapter 3. TileCal and its calibration 15
• Hardware: a quantitative understanding of the TileCal response requires moni-
toring and control of a large number of parameters such as electronic noise, PMT
gain, among others, which in turn depend on a large number of variables (time,
temperature,...). All such parameters must be known precisely in order to cor-
rectly interpret the data collected. Consequently, all these parameters have to be
measured precisely and integrated into the calibration system.
• Software: once the hardware calibration has been performed, one still has to
correctly estimate the shower energy. The calorimeter finite granularity will lead
to a non-exact estimation of the shower energy, even with a perfect hardware
calibration. This is sorted out using specific software corrections.
There are three main components in the TileCal calibration scheme (Figure 3.3) - the
Cesium system, the LASER system and the charge injection system (CIS). With those
3 systems we achieve a complete calibration of the hardware chain, from the active
modules to the read-out electronics.
Figure 3.3: Hardware calibration chain
3.1.1 Cesium System
A 137Cs source is moved inside the calorimeter modules during ATLAS shutdown periods
via a complex network of pipes filled with water. The light thus produced is collected
and measured for each cell, leading to the comparison of each TileCal cell response. In
Figure 3.4 is shown the response of 5 cells during the passage of the Cesium source.
Each secondary peak represents the passage of the source through a tile. In this case,
for the second cell, there is an absence of a peak. This is due to poor coupling between
the fiber and the scintillating tile. With the detection of such a flaw one can make a
repair. However since the signal passes through the full data aquisition chain if the
Cesium sees a drop in one cell efficiency, it could be due to different sorts of problems,

Chapter 3. TileCal and its calibration 16
for example a gain variation in the PMTs. We thus need other systems in order to solve
this uncertainty.
Figure 3.4: PMT current as a function of source position for 5 adjacent cells
The Cs system provides a calibration of the full readout chain.
3.1.2 LASER system
The LASER system is the next in the chain and was designed to calibrate and monitor
the PMTs response with an accuracy better that 0.5%. The LASER pulse produces a
similar PMT response as a signal generated by a particle in the TileCal. The major
difference is that the initial energy of the light pulse is known precisely (better than
1%). This enables accurate monitoring of PMT gains and linearity.
The LASER system is divided into two main parts: the LASER box and the light
distribution system.
3.1.2.1 LASER box
The LASER box (in Figure 3.5) contains not only the LASER head, but also two PMTs
used for triggering and monitoring purposes, four Si PIN photodiodes (inter-calibrated
by a 241Am source) used for the absolute measurement of the light intensity emitted by
the LASER, and the optical circuitry necessary for changing the LASER beam intensity.
The humidity and temperature in the box are constantly monitored and controlled.
The LASER light is transmitted to the photodiodes via four optical fibers connected
to the box. One out of the four fibers (the one linked to diode number 1) is receiving

Chapter 3. TileCal and its calibration 17
Figure 3.5: The Laser box
light collected directly in the LASER box, whereas the others are getting information
at another level of the system. Diode 1 and the two PMTs (which are similar to the
PMTs installed in the TileCal) receive light via a semi-reflecting mirror.
The light that is not reflected by the mirror passes through a filter wheel with 8 holes.
One of them is empty (position 5) while the others contain filters providing beam atten-
uation with a factor 3 to 1000. The design values of the filter attenuations are in Table
3.1. These filters were chosen to provide full coverage of the entire TileCal dynamic
range, from a few hundred of MeV to around 1TeV.
Position 1 2 3 4 5 6 7 8
Attenuation 1050±350 103±23 32±6 10±1 1 3.1±0.2 103±23 330±100
Table 3.1: Filter wheel attenuation factors
In the Laser box there is also a shutter, which was installed for safety reasons and is
closed when the LASER is not in use. It can be used to make tests without sending
light to the TileCal.

Chapter 3. TileCal and its calibration 18
3.1.2.2 Light Distribution System
If a LASER pulse is emitted when the shutter is opened, the light exits the LASER box
and enters into a 1m long liquid light guide. It links the LASER box output to the first
component of the light distribution system - the beam expander (Figure 3.6). It is a
system composed of two lenses that expand the beam diameter. It also has a diffuser in
order to prevent effects due to LASER light coherence. The Coimbra box in turn sends
the primary beam toward a bunch of 384 clear fibers (128 for each end-cap barrel, and
128 for the long barrel).
Figure 3.6: Beam expander
Each fiber is glued to an adjustable connector that is held in a big patch panel located
immediately behind the LASER box. The role of the connectors is to equalize the light
sent by all the fibers to the TileCal. The fact that all PMTs receive roughly the same
light amount simplifies the calibration work.
At the other side of the connectors, long clear fibers take the light individually to TileCal
drawers where they are split a last time in order to reach all the PMTs. Each extended
barrel is fed by two fibers (17 PMTs per fiber) and each barrel module (two partitions)
is fed by two fibers (45 PMTs per fiber). This is summarized in Figure 3.7.
Again, not all of the fibers coming out of the Coimbra box go to the TileCal. Around
20 fibers are either kept as spares, or used to feed the three remaining diodes in the
LASER box.
This system is fast enough to be used in the acquisition phase. During each acquisition
run the LASER will send pulses in the gaps of beam particle crossing. This is used to
check, for example, the status of the PMTs during all the data acquisition run (Figure
3.8).

Chapter 3. TileCal and its calibration 19
Figure 3.7: The light distribution system
Figure 3.8: Calibration event during a gap

Chapter 3. TileCal and its calibration 20
3.1.3 CIS
Change impulses of known intensity are pulsed into the readout electronic chain. These
mimic the response of the PMTs in the electronics located ahead of the PMTs. It leads
to a precise estimation of the electronic noise and linearity. Its objective is an accuracy
of around 1%. In ATLAS there will be periodic CIS runs over the full dynamic range
during maintenance periods. Also, in data acquisition phases, a fixed amplitude signal is
injected when there are no crossings of particles, for calibration purposes. CIS calibrates
the end side of the readout chain.

Chapter 4
Linearity studies using one
LASER intensity and different
wheel positions
The files being analyzed are ntuples coming from LASER runs with all sorts of infor-
mation, such as the signal of TileCal PMT, the ADC of the LASER box four diodes
and the two PMTs and respective pedestals, intensity of the LASER, temperature, etc.
The runs used are: 129566, 129570, 129574, 130425, 130430, 130435 corresponding to
the LASER intensities: 15k, 20k, 25k, 15k, 20k, 25k respectively.
The linearity plots will be made plotting the signal of a PMT of the TileCal against the
reference signal (Diode 1 or PMT 1). Since the signal from the references comes from
the LASER light reflected by the mirror that is never attenuated by the filter wheel (as
explained in chapter 3), that attenuation factor needs to be taken into account to scale
the reference signal and make the plot.
The first thing to do is to convert the histograms from each TileCal PMT and the
reference signal used (Diode 1 or PMT 1 of the LASER box) to a mean value. This is
done fitting a gaussian function to the histogram and taking the p1 parameter (mean) as
shown in Figure 4.1. Selecting only the signals in the interval 0.1-700pC and 50-2050ADC
for the TileCal PMTs and the PMTs or diodes of the LASER box respectively.
f(x) = p0e− 1
2
(x−p1p2
)2
(4.1)
The attenuation factors are computed as the ratio between the mean signal (from the
fit described above) of a PMT using filter 5 (no attenuation) and the filter in question.
21

Chapter 4. Linearity studies using one LASER intensity and different wheel positions22
Entries 2373Mean 64.64RMS 5.935
Signal (in pC)45 50 55 60 65 70 75 80 85
Nu
mb
er o
f E
ven
ts
0
10
20
30
40
50
60
70
80Entries 2373Mean 64.64RMS 5.935
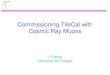
Figure 4.1: Gaussian fit for the signal of PMT000 for filter 5 and intensity 15k.
E5 = FiEi ↔ Fi =E5
Ei, i = filters wheel positions (4.2)
Making an histogram with all the PMTs calculated factors for a given filter, one can
fit a gaussian function again to get the mean value. The histograms for each filter are
shown in Figure 4.2.
These values are within the ones provided by the manufacturer (Table 3.1).
Now, having the values for the PMTs signal and the reference signal (scaled with the
attenuated factor) it is possible to make the linearity plot.
The plots with one and all the three runs were done (Figure 4.3) and it is evident that
when we mix the three runs there are sources of systematic errors that increase the chi-
square probability (χ2/ndf and χ2 probability plots in Figures 4.4 and 4.5 respectively).
These problems will be addressed in chapter 5.
It is worth noting that even using only one run, the fit does not give good a χ2 probability
because the errors coming from each point are so small. In fact, looking at Figure 4.1
it is clear that the fit is done from a large sample of data, which makes the statistical
errors very small. The errors used so far are rms/√n and, as one can see, with such a
large n the errors are very small.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions23
Entries 9551Mean 928.4RMS 20.74
Filter attenuation factor800 850 900 950 1000 1050 1100
Nu
mb
er o
f ev
ents
0
50
100
150
200
250
300
Entries 9551Mean 928.4RMS 20.74
(a)
Entries 9552Mean 95.64RMS 0.5703
Filter 2 attenuation factor92 94 96 98 100 102
Nu
mb
er o
f E
ven
ts
0
200
400
600
800
1000
Entries 9552Mean 95.64RMS 0.5703
(b)
Entries 9552Mean 30.93RMS 0.3314
Filter 3 attenuation factor29 29.5 30 30.5 31 31.5 32 32.5 33
Nu
mb
er o
f ev
ents
0
100
200
300
400
500
600
Entries 9552Mean 30.93RMS 0.3314
(c)
Entries 9552Mean 10.07RMS 0.09457
Filter 4 attenuation factor9.6 9.8 10 10.2 10.4 10.6 10.8 11
Nu
mb
er o
f E
ven
ts
0
100
200
300
400
500
600
Entries 9552Mean 10.07RMS 0.09457
(d)
Entries 9553
Mean 2.656
RMS 0.007972
Filter 6 attenuation factor2.6 2.62 2.64 2.66 2.68 2.7 2.72
Nu
mb
er o
f E
ven
ts
0
200
400
600
800
1000
1200
1400
Entries 9553
Mean 2.656
RMS 0.007972
(e)
Entries 9551Mean 924RMS 19.17
Filter 7 attenuation factor850 900 950 1000 1050
Nu
mb
er o
f E
ven
ts
0
50
100
150
200
250
300
Entries 9551Mean 924RMS 19.17
(f)
Entries 9552Mean 242.2RMS 1.793
Filter 8 attenuation factor235 240 245 250 255
Nu
mb
er o
f E
ven
ts
0
100
200
300
400
500
600
700Entries 9552Mean 242.2RMS 1.793
(g)
Figure 4.2: Histograms obtained from the attenuation factors from all the PMTs.a)Attenuation factor for filter 1, b) for filter 2, c) for filter 3, d) for filter 4, e) for filter
6, f) for filter 7, f) for filter 8.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions24
PMT 1 signal (in ADC)20 40 60 80 100 120 140 160 180 200 220
PM
T s
ign
al (
in p
C)
0
10
20
30
40
50
60
70
/ ndf 2χ 3655 / 6p0 0.0007401± -0.05545 p1 0.0003563± 0.3062
/ ndf 2χ 3655 / 6p0 0.0007401± -0.05545 p1 0.0003563± 0.3062
(a)
PMT1 signal (in ADC)100 200 300 400 500 600
PM
T s
ign
al (
in p
C)
0
50
100
150
200
/ ndf 2χ 8985 / 22p0 0.0004576± -0.02608 p1 0.0001226± 0.3147
/ ndf 2χ 8985 / 22p0 0.0004576± -0.02608 p1 0.0001226± 0.3147
(b)
Figure 4.3: Linearity plots for PMT000 with a) 8 points using 1 run b) 24 points, 3runs.
Entries 9619
Mean 7.894
RMS 12.13
Chi2/ndf0 10 20 30 40 50 60 70 80
Nu
mb
er o
f ev
ents
0
100
200
300
400
500
600
700
800
900
Entries 9619
Mean 7.894
RMS 12.13
(a)
chi2/ndf0 100 200 300 400 500 600 700 800 900 1000
Nu
mb
er o
f ev
ents
0
10
20
30
40
50
60
70
80
90
(b)
Figure 4.4: χ2/ndf a) using 1 run b) using 3 runs.
Chi-square probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f ev
ents
0
1000
2000
3000
4000
5000
(a)
Chi square probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f ev
ents
0
2000
4000
6000
8000
10000
(b)
Figure 4.5: χ2 probability a) using 1 run b) using 3 runs.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions25
4.1 PMT1 vs diode 1 as references
Another fact to note is that it was used so far the PMT1 as reference (instead of diode 1)
because the diodes are affected by the light crosstalk effect [10] meaning so that the four
of them are close enough to affect the signals of each other. While this is not a problem
when making stability analysis, it becomes more serious for the linearity because the
diodes signal will not be linear anymore.
Comparing the fits coming from plots with the PMT1 and the diode 1 as reference, one
ends up with Figure 4.6.
From this results it cannot be observed the crosstalk effect as both references give very
similar probabilities in the fit.
4.2 rms vs gaussian error
Another comparison that can be done is between using rms errors or the error from the
gaussian fit in the mean parameter p1. As shown in Figure 4.7, there is some difference
between the methods of errors used. However, it seems that there are no systematic
effect.
4.3 Different intensities
Now, using PMT1 as reference (that does not suffer from the crosstalk), one could
compare runs 129566, 129570, 129574 (15k, 20k and 25k) parameters plotted in Figures
4.8, 4.9 and 4.10. Although the probability plots do not seem to follow any pattern, since
the fits continue to appear very bad, due to the very small statistical errors, there is an
improvement in the fit, looking at the residuals. Low intensities, such as 15k (Figures
4.8 and 4.11) filters 1 and 7 and, to some extension, filter 8 (corresponding to larger
filter attenuations or, in another way, weaker signals) give the bigger deviations from
the fit. This is due to the non-linearity of the electronics[10] that occurs for signals
<100pC. Since the signals are selected in the interval from 0.1 to 700pC the results
show that effect. In the next chapter those values will not be considered. It is worth to
point out that all the residuals are around zero meaning that they are not biased. The
offset parameter is also around zero as expected. Looking at the residual values, and
disregarding filter 1, 7 and 8 at low intensity, they are between around 1% to 2%.
Also comparing both 15k runs 129566 (Figure 4.8) and 130425 (Figure 4.11), and 20k
run (Figure 4.9) and 130425 (Figure 4.12) the results are similar as it was expected.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions26
Entries 9619
Mean 0.01573
RMS 0.08168
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
7000
8000
9000 Entries 9619
Mean 0.01573
RMS 0.08168
(a)
Entries 9619
Mean 0.01538
RMS 0.08066
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f E
ntr
ies
0
1000
2000
3000
4000
5000
6000
7000
8000
9000Entries 9619
Mean 0.01538
RMS 0.08066
(b)
Entries 9552
Mean 0.07334
RMS 0.1731
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
Entries 9552
Mean 0.07334
RMS 0.1731
(c)
Entries 9552
Mean 0.07206
RMS 0.1716
qui square probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
Entries 9552
Mean 0.07206
RMS 0.1716
(d)
Entries 9477
Mean 0.02728
RMS 0.1036
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f E
ntr
ies
0
1000
2000
3000
4000
5000
6000
7000
8000Entries 9477
Mean 0.02728
RMS 0.1036
(e)
Entries 9477Mean 0.0265
RMS 0.1021
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
7000
8000Entries 9477Mean 0.0265
RMS 0.1021
(f)
Figure 4.6: χ2probability comparison using as references diode 1 and PMT1 a) 15krun using diode 1 as reference b) 15k run using PMT1 c) 20k run using diode 1 d) 20k
run using PMT1 e) 25k run using diode 1 and f) 25k run using PMT1.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions27
Entries 9619
Mean 0.01573
RMS 0.08168
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
7000
8000
9000 Entries 9619
Mean 0.01573
RMS 0.08168
(a)
Entries 9619Mean 0.0958
RMS 0.1922
qui-squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
Entries 9619Mean 0.0958
RMS 0.1922
(b)
Entries 9552
Mean 0.07334
RMS 0.1731
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
Entries 9552
Mean 0.07334
RMS 0.1731
(c)
Entries 9552Mean 0.06101
RMS 0.1578
qui-squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
Entries 9552Mean 0.06101
RMS 0.1578
(d)
Entries 9477
Mean 0.02728
RMS 0.1036
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f E
ntr
ies
0
1000
2000
3000
4000
5000
6000
7000
8000Entries 9477
Mean 0.02728
RMS 0.1036
(e)
Entries 9477
Mean 0.01878
RMS 0.08622
qui-squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
7000
8000
Entries 9477
Mean 0.01878
RMS 0.08622
(f)
Figure 4.7: χ2 probability comparison between rms error and gaussian a) 15k runusing rms error b) 15k run using gaussian error c) 20k run using rms error d) 20k runusing gaussian error e) 25k run using rms error and f) 25k run using gaussian error.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions28
Entries 9619Mean 0.09411
RMS 0.1905
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
Entries 9619Mean 0.09411
RMS 0.1905
(a)
Entries 9619
Mean 0.002103
RMS 0.007636
offset-0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05
nu
mb
er o
f en
trie
s0
100
200
300
400
500
600
Entries 9619
Mean 0.002103
RMS 0.007636
(b)
Entries 9619Mean 0.6134
RMS 0.2021
Slope0 0.5 1 1.5 2 2.5
Nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
Entries 9619Mean 0.6134
RMS 0.2021
(c)
Entries 9607Mean -0.3391
RMS 5.104
Normalized residual of point corresponding to filter 1 (in %)-20 -15 -10 -5 0 5 10 15 20
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
Entries 9607Mean -0.3391
RMS 5.104
(d)
Entries 9619Mean -0.387RMS 1.051
Normalized residual of point corresponding to filter 2 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f ev
ents
0
50
100
150
200
250
Entries 9619Mean -0.387RMS 1.051
(e)
Entries 9619Mean -0.1566
RMS 0.6585
Normalized residual of point corresponding to filter 3 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
450
Entries 9619Mean -0.1566
RMS 0.6585
(f)
Entries 9617Mean 0.3174
RMS 1.259
Normalized residual of point corresponding to filter 4 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
Entries 9617Mean 0.3174
RMS 1.259
(g)
Entries 9619
Mean 0.09115
RMS 0.7186
Normalized residual of point corresponding to filter 5 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
Entries 9619
Mean 0.09115
RMS 0.7186
(h)
Entries 9618
Mean 0.09676
RMS 0.7602
Normalized residual of point corresponding to filter 6 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
Entries 9618
Mean 0.09676
RMS 0.7602
(i)
Entries 9601Mean 0.766RMS 5.688
Normalized residual of point corresponding to filter 7 (in %)-20 -15 -10 -5 0 5 10 15 20
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
Entries 9601Mean 0.766RMS 5.688
(j)
Entries 9617Mean -0.3783
RMS 1.793
Normalized residual of point corresponding to filter 8 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f ev
ents
0
20
40
60
80
100
120
Entries 9617Mean -0.3783
RMS 1.793
(k)
Figure 4.8: 15k run histograms (run 129566) a) the χ2 probability, b) the offsetparameter, c) the slope and d-k) the normalized residuals (in %) for the 8 filter wheel
positions.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions29
Entries 9552
Mean 0.05922
RMS 0.1555
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
Entries 9552
Mean 0.05922
RMS 0.1555
(a)
Entries 9552
Mean -0.0004076
RMS 0.005154
offset-0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05
nu
mb
er o
f en
trie
s0
100
200
300
400
500
600
700
800
900Entries 9552
Mean -0.0004076
RMS 0.005154
(b)
Entries 9552Mean 0.6244
RMS 0.1857
slope0 0.5 1 1.5 2 2.5
nu
mb
er o
f ev
ents
0
50
100
150
200
250
300
Entries 9552Mean 0.6244
RMS 0.1857
(c)
Entries 9551
Mean 0.02396
RMS 0.7211
Normalized residual of point corresponding to filter 1 (in %)-10 -5 0 5 10
nu
mb
er o
f en
trie
s
0
200
400
600
800
1000
1200
1400
1600
1800
Entries 9551
Mean 0.02396
RMS 0.7211
(d)
Entries 9552
Mean -0.04984
RMS 0.5175
Normalized residual of point corresponding to filter 2 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
100
200
300
400
500
Entries 9552
Mean -0.04984
RMS 0.5175
(e)
Entries 9552Mean 0.1333
RMS 0.8848
Normalized residual of point corresponding to filter 3 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
100
200
300
400
500
Entries 9552Mean 0.1333
RMS 0.8848
(f)
Entries 9551
Mean 0.01728
RMS 0.7116
Normalized residual of point corresponding to filter 4 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
Entries 9551
Mean 0.01728
RMS 0.7116
(g)
Entries 9552
Mean -0.01698
RMS 0.3489
Normalized residual of point corresponding to filter 5 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
100
200
300
400
500
600
700
800
Entries 9552
Mean -0.01698
RMS 0.3489
(h)
Entries 9552
Mean -0.01771
RMS 0.2954
Normalized residual of point corresponding to filter 6 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
200
400
600
800
1000
Entries 9552
Mean -0.01771
RMS 0.2954
(i)
Entries 9551Mean -0.0103
RMS 1.195
Normalized residual of point corresponding to filter 7 (in %)-20 -15 -10 -5 0 5 10 15 20
nu
mb
er o
f en
trie
s
0
200
400
600
800
1000
1200
Entries 9551Mean -0.0103
RMS 1.195
(j)
Entries 9552
Mean -0.08198
RMS 0.6339
Normalized residual of point corresponding to filter 8 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
Entries 9552
Mean -0.08198
RMS 0.6339
(k)
Figure 4.9: 20k run histograms (run 129570) a) the χ2 probability, b) the offsetparameter, c) the slope and d-k) the normalized residuals (in %) for the 8 filter wheel
positions.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions30
Entries 9477
Mean 0.01773
RMS 0.08379
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
7000
8000
Entries 9477
Mean 0.01773
RMS 0.08379
(a)
Entries 9477
Mean -0.0003221
RMS 0.005049
offset-0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05
nu
mb
er o
f en
trie
s0
100
200
300
400
500
600
700
800
900
Entries 9477
Mean -0.0003221
RMS 0.005049
(b)
Entries 9477Mean 0.6305
RMS 0.1784
slope0 0.5 1 1.5 2 2.5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
Entries 9477Mean 0.6305
RMS 0.1784
(c)
Entries 9476
Mean -0.02317
RMS 1.069
Normalized residual of point corresponding to filter 1 (in %)-20 -15 -10 -5 0 5 10 15 20
nu
mb
er o
f en
trie
s
0
200
400
600
800
1000
1200
1400
1600
1800
Entries 9476
Mean -0.02317
RMS 1.069
(d)
Entries 9476
Mean -0.03562
RMS 0.5292
Normalized residual of point corresponding to filter 2 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
100
200
300
400
500
Entries 9476
Mean -0.03562
RMS 0.5292
(e)
Entries 9475Mean 0.2088
RMS 1.222
Normalized residual of point corresponding to filter 3 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
Entries 9475Mean 0.2088
RMS 1.222
(f)
Entries 9476
Mean -0.001479
RMS 0.61
Normalized residual of point corresponding to filter 4 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
Entries 9476
Mean -0.001479
RMS 0.61
(g)
Entries 9477
Mean -0.02668
RMS 0.3038
Normalized residual of point corresponding to filter 5 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f ev
ents
0
100
200
300
400
500
600
700
800
900
Entries 9477
Mean -0.02668
RMS 0.3038
(h)
Entries 9477
Mean -0.02201
RMS 0.3026
Normalized residual of point corresponding to filter 6 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
100
200
300
400
500
600
700
800
900
Entries 9477
Mean -0.02201
RMS 0.3026
(i)
Entries 9476
Mean -0.07963
RMS 1.207
Normalized residual of point corresponding to filter 7 (in %)-20 -15 -10 -5 0 5 10 15 20
nu
mb
er o
f en
trie
s
0
200
400
600
800
1000
1200
Entries 9476
Mean -0.07963
RMS 1.207
(j)
Entries 9476
Mean -0.04466
RMS 0.5808
Normalized residual of point corresponding to filter 8 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
Entries 9476
Mean -0.04466
RMS 0.5808
(k)
Figure 4.10: 15k run histograms (run 129574) a) the χ2 probability, b) the offsetparameter, c) the slope and d-k) the normalized residuals (in %) for the 8 filter wheel
positions.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions31
Entries 9647Mean 0.1026
RMS 0.2003
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
Entries 9647Mean 0.1026
RMS 0.2003
(a)
Entries 9647
Mean 0.002154
RMS 0.007995
offset-0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05
nu
mb
er o
f en
trie
s0
100
200
300
400
500
600
Entries 9647
Mean 0.002154
RMS 0.007995
(b)
Entries 9647Mean 0.6381
RMS 0.2285
slope0 0.5 1 1.5 2 2.5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350Entries 9647Mean 0.6381
RMS 0.2285
(c)
Entries 9635Mean -0.1532
RMS 4.652
Normalized residual of point corresponding to filter 1 (in %)-20 -15 -10 -5 0 5 10 15 20
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
Entries 9635Mean -0.1532
RMS 4.652
(d)
Entries 9647Mean -0.3947
RMS 1.058
Normalized residual of point corresponding to filter 2 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
20
40
60
80
100
120
140
160
180
200
220
240
Entries 9647Mean -0.3947
RMS 1.058
(e)
Entries 9647Mean -0.1491
RMS 0.6422
Normalized residual of point corresponding to filter 3 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
450
Entries 9647Mean -0.1491
RMS 0.6422
(f)
Entries 9647Mean 0.3302
RMS 1.238
Normalized residual of point corresponding to filter 4 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300Entries 9647Mean 0.3302
RMS 1.238
(g)
Entries 9647Mean 0.1034
RMS 0.7396
Normalized residual of point corresponding to filter 5 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400Entries 9647Mean 0.1034
RMS 0.7396
(h)
Entries 9646Mean 0.1075
RMS 0.7915
Normalized residual of point corresponding to filter 6 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
Entries 9646Mean 0.1075
RMS 0.7915
(i)
Entries 9627Mean 0.5878
RMS 6.013
Normalized residual of point corresponding to filter 7 (in %)-20 -15 -10 -5 0 5 10 15 20
nu
mb
er o
f en
trie
s
0
20
40
60
80
100
120
140
160
180
200
220
240
Entries 9627Mean 0.5878
RMS 6.013
(j)
Entries 9645Mean -0.3903
RMS 1.789
Normalized residual of point corresponding to filter 8 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
20
40
60
80
100
120
Entries 9645Mean -0.3903
RMS 1.789
(k)
Figure 4.11: 15k run histograms (run 130425) a) the χ2 probability, b) the offsetparameter, c) the slope and d-k) the normalized residuals (in %) for the 8 filter wheel
positions.

Chapter 4. Linearity studies using one LASER intensity and different wheel positions32
Entries 9533
Mean 0.07077
RMS 0.1727
qui squared probability0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
nu
mb
er o
f en
trie
s
0
1000
2000
3000
4000
5000
6000
Entries 9533
Mean 0.07077
RMS 0.1727
(a)
Entries 9533
Mean -0.0006397
RMS 0.00619
offset-0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05
nu
mb
er o
f en
trie
s0
100
200
300
400
500
600
700
800
Entries 9533
Mean -0.0006397
RMS 0.00619
(b)
Entries 9533Mean 0.6331
RMS 0.2009
slope0 0.5 1 1.5 2 2.5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
Entries 9533Mean 0.6331
RMS 0.2009
(c)
Entries 9531Mean 0.0149
RMS 1.309
Normalized residual of point corresponding to filter 1 (in %)-20 -15 -10 -5 0 5 10 15 20
nu
mb
er o
f en
trie
s
0
200
400
600
800
1000
1200
1400
Entries 9531Mean 0.0149
RMS 1.309
(d)
Entries 9533
Mean -0.05616
RMS 0.5423
Normalized residual of point corresponding to filter 2 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
100
200
300
400
500
Entries 9533
Mean -0.05616
RMS 0.5423
(e)
Entries 9533Mean 0.1338
RMS 0.9077
Normalized residual of point corresponding to filter 3 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
450
Entries 9533Mean 0.1338
RMS 0.9077
(f)
Entries 9532
Mean 0.01299
RMS 0.6756
Normalized residual of point corresponding to filter 4 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
Entries 9532
Mean 0.01299
RMS 0.6756
(g)
Entries 9533
Mean -0.01734
RMS 0.3654
Normalized residual of point corresponding to filter 5 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
100
200
300
400
500
600
700
Entries 9533
Mean -0.01734
RMS 0.3654
(h)
Entries 9533
Mean -0.01918
RMS 0.3202
Normalized residual of point corresponding to filter 6 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
200
400
600
800
1000
Entries 9533
Mean -0.01918
RMS 0.3202
(i)
Entries 9532
Mean -0.01425
RMS 1.29
Normalized residual of point corresponding to filter 7 (in %)-20 -15 -10 -5 0 5 10 15 20
nu
mb
er o
f en
trie
s
0
200
400
600
800
1000
1200
1400
Entries 9532
Mean -0.01425
RMS 1.29
(j)
Entries 9533
Mean -0.07875
RMS 0.6197
Normalized residual of point corresponding to filter 8 (in %)-5 -4 -3 -2 -1 0 1 2 3 4 5
nu
mb
er o
f en
trie
s
0
50
100
150
200
250
300
350
400
Entries 9533
Mean -0.07875
RMS 0.6197
(k)
Figure 4.12: 20k run histograms (run 130430) a) the χ2 probability, b) the offsetparameter, c) the slope and d-k) the normalized residuals (in %) for the 8 filter wheel
positions.

Chapter 5
Linearity studies using a single
filter wheel position and different
intensity runs
In chapter 4, results of linearity studies obtained with a moving filter wheel were dis-
cussed. The data show that the point by point fluctuations are larger than the statistical
errors, producing bad χ2 probability fits. The origin of the systematic errors can be stud-
ied using a simpler data taking configuration with a single filter position and different
laser intensities. The results obtained are discussed in this chapter. Data with the filter
wheel in position 5 (no light attenuation) and 8 intensities equal to 15k, 17k, 19k, 21k,
23k, 25k, 27k and 29k were used. Selecting only points with energy between 100 - 700 pC
were eliminated the energy intervals in the region of the nonlinearity of the electronics
(<100 pC) and the energies for which the PMTs start to saturate [10] . Additionally
was removed all the PMTs flagged as having an identified bad behavior.
In Section 1, the results obtained using the LASER box PMT’s (PMT1 and PMT2)
were discussed. These results do not suffer from the light crosstalk effect. The linearity
studies performed using the photodiode 4 are presented in section 2. Sections 3 and 4
are devoted to the results obtained using the PMTs of the TileCal to normalize.
The linearity results were obtained using the scatter plots PMT signal versus the signal
of the reference counter. A typical example obtained using the PMT1 of the LASER box
is shown in 5.1. The TileCal photomultiplier and reference signals were defined as the
average of the corresponding distributions. The error is given by the ratio between the
r.m.s. of the correspondent distributions and the square root of the number of histogram
entries. Contrary to chapter 4 where the original ntuples were used and the parameters
33

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 34
calculated from the distributions, in this case they were already given by the calibration
software.
As shown in 5.1 the data are fitted using the straight line function PMT = a.Sigref +
b. Where Sigref is the normalization signal.
PMT1 signal (in ADC)
400 600 800 1000 1200
PM
T_0
sig
nal (
in p
C)
200
300
400
Figure 5.1: Example of a fit
5.1 PMTs vs PMT1
The results are shown in Figure 5.2. One can immediately see that the residuals of the
points are biased: not centered at zero as they should. The same for the offset parameter.
This indicates that there are some systematic effects that are shifting the points in some
direction affecting the fits, resulting in bad chi-squares. This effect produces residuals
that go up to 2% maximum.
The results can be explained if the PMT1 signal is not linear. Also there could be some
kind of change in the Laser system itself in a way that 2 runs with the same intensity
produce different output signals. Those hypothesis will be discussed in the next sections.
5.1.1 Linearity of the PMTs in the LASER box
The same set of runs was taken, this time with the shutter closed, so that no light passed
to the PMTs of TileCal and to diodes 2 to 4, eliminating the crosstalk on diode 1. This

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 35
Chi-square Probability
0 0.2 0.4 0.6 0.8 1
Num
ber
of E
ntrie
s
0
2000
4000
6000
8000
(a)
Offset Parameter
-30 -25 -20 -15 -10 -5 0
Num
ber
of E
ntrie
s
0
200
400
(b)
Slope
0 0.5 1 1.5 2
Num
ber
of E
ntrie
s
0
200
400
(c)
Normalized Residual of the point 1 (in %)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Num
ber
of E
ntrie
s
0
100
200
300
(d)
Normalized Residual of the point 2 (in %)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Num
ber
of E
ntrie
s
0
500
1000
(e)
Normalized Residual of the point 3 (in %)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Num
ber
of E
ntrie
s
0
200
400
600
800
(f)
Normalized Residual of the point 4 (in %)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Num
ber
of E
ntrie
s
0
500
1000
1500
(g)
Normalized Residual of the point 5 (in %)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Num
ber
of E
ntrie
s
0
500
1000
1500
(h)
Normalized Residual of the point 6 (in %)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2N
umbe
r of
Ent
ries
0
500
1000
1500
(i)
Normalized Residual of the point 7 (in %)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Num
ber
of E
ntrie
s
0
500
1000
(j)
Normalized Residual of the point 8 (in %)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Num
ber
of E
ntrie
s
0
500
1000
(k)
Figure 5.2: Histograms obtained in the study PMT vs PMT1. a) the chi-squaredprobability, b) the offset parameter, c) the slope, and d-k) The residuals (in %) of the
points 1 to 8 that correspond to the intensities 14k to 23k.
one was assumed to be linear and thus used as reference. The plots PMT1/2 vs Diode
1 were produced and again the normalized residuals were calculated (Figure 5.3).
The χ2/NDF is bad (11.4 for PMT1 and 22.2 for PMT2, and chi-square probabilities
very low 10−11, 10−22 respectively) but again, the statistical errors in each point are
very small due the large number of entries. Looking at the residuals they are smaller
than 0.5% so one can assume that the linearity of the PMTs of the Laser box is adequate.

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 36
Diode 1 Signal (in ADC)
200 400 600 800
Nor
mal
ized
Res
idua
ls (
in %
)
0
0.5
(a) PMT1 vs Diode 1
Diode 1 Signal (in ADC)
200 400 600 800
Nor
mal
ized
Res
idua
ls (
in %
)
-0.5
0
0.5
(b) PMT2 vs Diode 1
Figure 5.3: Linearity of the PMTs in the LASER box
5.1.2 Comparing runs with the same intensity
To try to understand the amplitude of the fluctuations, several runs were taken at 14k
and 26k. The ratios PMT/PMT1 were computed.
PMT Signal (in pC)
216 218 220 222 224 226
PM
T_0
/PM
T1
0.3135
0.314
0.3145
(a) 14k
PMT Signal (in pC)
215 220 225 230 235
PM
T_0
/PM
T1
0.3135
0.314
0.3145
0.315
(b) 26k
Figure 5.4: Fluctuations in the Signal for the same intensity
Figure 5.4 shows the values of the ratios in the case of 14k (a) and 26k (b) intensities.
There are some fluctuations in the signal not suppressed by the ratios at the low intensity
that go to 4% for some PMTs and much smaller at higher intensities (<0.5%).
The impact of the variation of the temperature in the laser head on the linearity deter-
mination was also studied. Figure 5.5 shows that for a set of runs taken consecutively
with intensities 14k, 26k, 14k, 26k and so on, the temperature of the laser head clearly
increases with time.
The dependence of the signals in one PMT of the Tilecal (PMT0) and in the PMT1 are
shown in Figures 5.6 and 5.7 for intensities equal to 14k and 26k respectively.

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 37
Time (in minutes)
5 10 15 20 25 30 35 40 45
Tem
pera
ture
of t
he L
aser
hea
d (in
C)
24.2
24.4
24.6
24.8
25
Figure 5.5: Temperature evolution in consecutive runs
Time (in minutes)
10 15 20 25 30 35 40 45
PM
T_0
of t
he T
ileca
l sig
nal (
in p
C)
220
225
Time (in minutes)
10 15 20 25 30 35 40 45
PM
T1
sign
al (
in p
C)
690
700
710
Figure 5.6: Signals for PMT1 and PMT0 versus time for intensity 14k.
Laser head temperature (in C)
24 24.5 25 25.5 26
PM
T_0
of t
he T
ileca
l sig
nal (
in p
C)
215
220
225
230
235
Laser head temperature (in C)
24 24.5 25 25.5 26
PM
T1
sign
al (
in p
C)
700
720
740
Figure 5.7: Signals for PMT1 and PMT0 versus the temperature for intensity 26k,one can see there is a correlation here

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 38
For 26k it is clearly seen some correlation between the signals and the temperature. The
ratios also seem correlated to the temperature (Figure 5.8). The effect is less apparent at
26k because, as shown in Figure 5.7, the change in PMT1 and PMT0 are more correlated.
Time (in minutes)
10 15 20 25 30 35 40 45
PM
T_0
/PM
T1
0.3135
0.314
0.3145
(a) 14k
Laser head temperature (in C)
24 24.5 25 25.5 26
PM
T_0
/PM
T1
0.3135
0.314
0.3145
0.315
(b) 26k
Figure 5.8: Correlation between the ratios and a) time for 14k and b) the temperaturefor 26k
5.1.3 Different intensities with temperature
Going back to the runs analyzed at the beginning, it was compared the points with
different temperatures in the Laser head.
PMT1 Signal (in ADC)
400 600 800 1000 1200
PM
T_0
Sig
nal (
in p
C)
200
300
400
Figure 5.9: Linearity plot for the 1st PMT of the Tilecal
Figure 5.9 shows the scatter plot PMT0 versus PMT1. The data shows a variation of
the slope or offset around 600 ADC that seems linked to the variation in temperature

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 39
(shown in Figure 5.10). Comparing the chi-squares of the linear fit, the overall fit has
χ2/NDF=384, the blue (<600 ADC) 16 and the red (>600 ADC) 18.
PMT1 Signal (in ADC)
400 600 800 1000 1200
Tem
pera
ture
of t
he L
aser
hea
d (in
C)
24.8
25
25.2
Figure 5.10: Change in temperature along the runs
As it is unrealistic to wait for stabilization of the LASER head temperature before
taking the data, because this will take a few hours, in order to try to eliminate any
kind of systematic error coming from the LASER box, one needs to use as reference a
signal coming from somewhere after the laser box. There are two possibilities: use the
diodes after the laser box or some PMT of the Tilecal itself. Using a PMT of TileCal
as reference there could be a bias to the linearity determination because the reference
device can have the same problems of the measured PMTs. They can cancel in the ratio.
5.2 Using diode 4 as reference
In order to eliminate possible effects due to temperature variation, one can use a reference
after the laser box as well. One candidate are the diodes, that are expected to be not
so good due to the cross-talk effect. Cutting above 1800 ADC channel, so that the
saturated signals can be removed, one gets the results plotted in Figure 5.11.
Looking at the plots there is an improvement in the chi-square probability as well as the
very shifted offset parameter due to the cross-talk effect. Again, there are some small
bias in the residuals. But there is an improvement of the normalized residuals to 0.5%.

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 40
Chi-square probability
0 0.2 0.4 0.6 0.8 1
Num
ber
of e
ntrie
s
0
1000
2000
3000
(a)
Offset Parameter
0 20 40 60 80 100
Num
ber
of e
ntrie
s
0
100
200
300
400
(b)
Slope
0 0.1 0.2 0.3 0.4 0.5 0.6
Num
ber
of e
ntrie
s
0
100
200
300
400
(c)
Normalized residuals for point 1 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
500
1000
1500
2000
(d)
Normalized residuals for point 2 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
800
(e)
Normalized residuals for point 3 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
500
1000
(f)
Normalized residuals for point 4 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
500
1000
1500
2000
(g)
Normalized residuals for point 5 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
(h)
Figure 5.11: Histograms obtained in the study PMT vs diode 4. a) the chi-squaredprobability, b) the offset parameter, c) the slope, and d-h) The residuals (in %) of the
points 1 to 5
5.3 Using the 1st PMT of the TileCal as reference
Using the 1st PMT of the TileCal one gets very similar results to the previous case
with the obvious exception of the offset that no longer is that much shifted (no more
cross-talk). Again, there are some small bias in the residuals. The results are shown in
Figure 5.12.
5.4 Using the 1st PMT of the same fiber
Now, comparing only PMTs of the same fiber, one should get an improvement because
they all get the same signal regardless of the effect that signal suffered being splitted in
the optical apparatus. The results shown in Figure 5.13 were obtained using as reference
of each PMT of TileCal the first PMT belonging to the same fiber. Indeed, when the

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 41
Chi-square probability
0 0.2 0.4 0.6 0.8 1
Num
ber
of e
ntrie
s
0
1000
2000
3000
4000
(a)
Offset Parameter
-5 0 5 10 15 20 25 30
Num
ber
of e
ntrie
s
0
200
400
(b)
Slope
0 1 2 3 4 5
Num
ber
of e
ntrie
s
0
100
200
300
400
(c)
Normalized residuals for point 2 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
(d)
Normalized residuals for point 3 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
(e)
Normalized residuals for point 4 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
500
1000
1500
(f)
Normalized residuals for point 5 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
(g)
Normalized residuals for point 6 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
(h)
Normalized residuals for point 7 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
800
(i)
Normalized residuals for point 8 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
(j)
Figure 5.12: Histograms obtained in the study PMT vs the 1st PMT of the TileCal.a) the chi-squared probability, b) the offset parameter, c) the slope, and d-k) The
residuals (in %) of the points 2 to 8

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 42
1st PMT of a fiber is used as a reference to the following PMTs in the same fiber one
gets the histograms in Figure 5.13.
Chi-square probability
0 0.2 0.4 0.6 0.8 1
Num
ber
of e
ntrie
s
0
500
1000
(a)
Offset parameter
-10 -5 0 5 10
Num
ber
of e
ntrie
s
0
200
400
600
(b)
Slope
0 0.5 1 1.5 2 2.5 3 3.5 4
Num
ber
of e
ntrie
s
0
100
200
300
400
(c)
Normalized residual of point 1 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
100
200
300
(d)
Normalized residual of point 2 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
(e)
Normalized residual of point 3 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
(f)
Normalized residual of point 4 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
500
1000
(g)
Normalized residual of point 5 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
500
1000
(h)
Normalized residual of point 6 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
800
(i)
Normalized residual of point 7 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
200
400
600
(j)
Normalized residual of point 8 (in %)
-0.4 -0.2 0 0.2 0.4
Num
ber
of e
ntrie
s
0
50
100
150
(k)
Figure 5.13: Histograms obtained in the study PMT vs 1st PMT of the fiber. a) thechi-squared probability, b) the offset parameter, c) the slope, and d-k) The residuals
(in %) of the points 1 to 8.
As shown there is a huge improvement in the parameters. The offset is, for the first
time, centered around zero, as it should be, as well as the normalized residuals. So no
bias is observed using those references. One strange thing is the presence of fits with
low chi-square probability. Looking at the residuals, this could be due to the 1st point
that has larger values than the others. Removing that point from the fit leads to the
chi-square probability shown in Figure 5.14. In this case there is a tendency (also seen

Chapter 5. Linearity studies using a single filter wheel position and different intensityruns 43
in the previous plot) of an high chi-square probability, not flat as expected. These is
probably due to the fact that the PMTs of the same fibers are strongly correlated. The
residuals now go to 0.2% at maximum.
Chi-square probability
0 0.2 0.4 0.6 0.8 1
Num
ber
of e
ntrie
s
0
200
400
600
800
Figure 5.14: Chi-square probability excluding the 1st point

Chapter 6
Conclusions
It was proven difficult to quantify and describe well the various methods used in the
study. This is due to the very small errors of the parameters which give always bad χ2
probabilities. Despite that, several conclusion could be drawn.
Low intensities combined with large attenuation factors produce large residuals. As the
signal is low, any small deviations from the linearity fit contribute much more than
stronger intensity signals. There is also a non linearity effect in the electronics [10] that
contributes to the non linearity observed and is responsible for the increased residuals.
From chapter 5 it seems there are many sources of systematic errors in the system
starting from the LASER box. A change in the LASER head temperature seems to
have an impact on the signal splitting produced by the splitting mirror, resulting in bad
chi-squares fit probabilities and residuals that go up to 2%. Even using Diode 4 and a
TileCal PMT, there are still some (small) bias in the results indicating there are also
some systematics in the distribution of the light in the fibers. Regardless of this bias
there is an improvement in the residuals which go up to 0.5% maximum. Those bias are
finally suppressed when we look to PMTs of the same fiber. A summary of these results
is shown on Table 6.1.
Method p0 [pC] residuals [%] mean of χ2
prob distribution
PMTs vs PMT1 ∼-10 biased and <2% 0
PMTs vs diode 4 ∼30 biased and <0.5% 0.05
PMTs vs 1st PMT of TileCal ∼5 biased and <0.5% 0.16of TileCal
PMTs vs 1st PMT ∼0 not biased and <0.2% 0.75of the same fiber
Table 6.1: Summary of the results of the various methods
44

Bibliography
[1] G. Aad et al. The ATLAS Experiment at the CERN Large Hadron Collider. JINST,
3:S08003, 2008. URL http://iopscience.iop.org/1748-0221/3/08/S08003
[2] ATLAS Collaboration. Inner Detector Technical Design Report. CERN/LHC, 97-
17, 1997.
[3] ATLAS Liquid Argon Collaboration, J. Y. Hostachy. Construction and test results
of the ATLAS EM barrel calorimeter and presampler. Nucl. Phys. Proc. Suppl 125
(2003) 112116.
[4] ATLAS Collaboration. The ATLAS Experiment at the CERN Large Hadron. J.
Instrum., ATL-COM-PHYS-2007-102, 2007.
[5] P.Adragna et al. The ATLAS hadronic tile calorimeter: From construction toward
physics. IEEE Trans. Nucl. Sci, 53(2006) 1275–1281.
[6] ATLAS Collaboration. Tile Calorimeter Technical Design Report. Tech. Rep,
CERN-LHCC-96-42.
[7] Nuno Filipe da Silva Fernandes de Castro. Study of the Wtb vertex structure at
the ATLAS experiment. CERN-THESIS-2008-083.
[8] Miguel Castro Nunes Fiolhais. Study of ATLAS sensitivity to asymmetries in single
top events. Master Thesis CERN-THESIS-2009-014 2008
[9] V.Garde. PHD Thesis. 2004. URL http://tel.archives-ouvertes.fr/docs/
00/04/60/13/PDF/tel-00004368.pdf.
[10] D. Calvet et al. Commissioning of the ATLAS tile calorimeter LASER calibration
system. ATL-COM-TILECAL-2010, May 2010.
[11] R. Alves et al. ATLAS tile calorimeter LASER calibration system. ATL-TILECAL-
INT-2010-001, January 2010.
45