Embed Size (px)
Citation preview

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
HHui Huui HuDepartment of Aerospace Engineering, Iowa State University Department of Aerospace Engineering, Iowa State University
Ames, Iowa 50011, U.S.AAmes, Iowa 50011, U.S.A
Lecture # 14: Advanced Lecture # 14: Advanced Particle Image Particle Image VelocimetryVelocimetry TechniqueTechnique
AerEAerE 311L & AerE343L Lecture Notes311L & AerE343L Lecture Notes

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
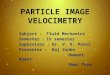
ParticleParticle--based techniques: Particle Image based techniques: Particle Image VelocimetryVelocimetry (PIV)(PIV)
• To seed fluid flows with small tracer particles (~µm), and assume the tracer particles moving with the same velocity as the low fluid flows.
• To measure the displacements (ΔL) of the tracer particles between known time interval (Δt). The local velocity of fluid flow is calculated by U= Δ L/Δt .
A. t=tA. t=t00 B. t=tB. t=t00+10 +10 μμss C. Derived Velocity fieldC. Derived Velocity fieldX (mm)
Y(m
m)
-50 0 50 100 150
-60
-40
-20
0
20
40
60
80
100
-0.9 -0.7 -0.5 -0.3 -0.1 0.1 0.3 0.5 0.7 0.95.0 m/sspanwise
vorticity (1/s)
shadow region
GA(W)-1 airfoil
t=tt=t00 tLUΔΔ
=
t= tt= t00++ΔΔttΔΔLL

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Effect of the outEffect of the out--ofof--plane velocity for 2plane velocity for 2--D PIV measurementsD PIV measurements
CameraCamera
Laser SheetLaser Sheet
ZZ
XX
Laser sheet
In-plane velocity
Out-of-plane velocity
y x
z
Real velocity
132.1%132.1%--0.050.05--0.060.065.05.04,0004,0001.701.7015.015.07.57.5HH
41.30%41.30%0.3940.3940.3630.3635.05.04,0004,0000.340.3415.015.07.57.5GG
13.75%13.75%0.7480.7480.6980.6985.05.04,0004,0000.170.1715.015.07.57.5FF
7.12%7.12%0.9800.9800.9910.9915.05.04,0004,0000.0170.01715.015.07.57.5AA
AVEAVE--ERRERRCRCR--VVCRCR--UUDDMMNNWWMMVVXXVVMMcasecase VVM M : average velocity (pixel/interval): average velocity (pixel/interval)VVXX : maximum Velocity (pixel/interval): maximum Velocity (pixel/interval)WWM M : out of plane velocity (laser width/interval): out of plane velocity (laser width/interval)N: tracer numberN: tracer numberDD M M : tracer average diameter (pixel): tracer average diameter (pixel)AverAver--Err: average error of PIV results without Err: average error of PIV results without
subsub--pixel interpolation.pixel interpolation.

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Stereoscopic PIV techniqueStereoscopic PIV technique
Camera 1Camera 1 Camera 2Camera 2
Laser SheetLaser Sheet
αα11
αα22
ZZ
XX
X P IX E L
YP
IXE
L
0 500 10000
100
200
300
400
500
600
700
800
900
1000
X P IX E L
YP
IXE
L
0 500 10000
100
200
300
400
500
600
700
800
900
1000
Displacement vectors in left camera Displacement vectors in left camera Displacement vectors in right camera Displacement vectors in right camera
-40-30
-20-10
010
2030X m
-40
-30
-20
-10
0
10
20
30
Ym
m
X
Y
Z
W m /s20.0019.0018.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.00

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Stereoscopic PIV techniqueStereoscopic PIV technique
Lens 1Lens 1
Image recording plane 1Image recording plane 1
Camera 1Camera 1 Camera 2Camera 2
Lens 2Lens 2
Image recording plane 2Image recording plane 2
Laser SheetLaser Sheet
lenslens
Image recording planeImage recording plane
Camera 1Camera 1 Camera 2Camera 2
C. Angle displacement C. Angle displacement arrangement with arrangement with sheimpflugsheimpflug condition condition
b. angle b. angle displacement displacement arrangement arrangement
a. lens a. lens translation translation arrangement arrangement
lenslens
Image recording planeImage recording plane
Camera 1Camera 1 Camera 2Camera 2
Laser SheetLaser Sheet

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Stereoscopic PIV techniqueStereoscopic PIV technique
a. image of left cameraa. image of left camera b. rectangular grid in the object plane c. image ofb. rectangular grid in the object plane c. image of left cameraleft cameraThe perspective effect of the angle displacement arrangementThe perspective effect of the angle displacement arrangement
Camera 1Camera 1 Camera 2Camera 2
Laser SheetLaser Sheet
αα11
αα22
ZZ
XX

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Mapping Function for Stereo PIVMapping Function for Stereo PIV
)()()(i
cc xFX =
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
ΔΔΔ
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
Δ
Δ
Δ
Δ
3
2
1
)2(3,2
)2(3,1
)1(3,2
)1(3,1
)2(2,2
)2(2,1
)1(2,2
)1(2,1
)2(1,2
)2(1,1
)1(1,2
)1(1,1
)2(2
)2(1
)1(2
)1(1
xxx
FFFF
FFFF
FFFF
XXXX
3,2,12,1,2,1)(
)(, ===
∂∂
= jicx
FFj
cic
ji
Camera 1Camera 1 Camera 2Camera 2
Laser SheetLaser Sheet
αα11
αα22
ZZ
XX
xFX ci Δ∇≅Δ )()(
Laser sheet
In-plane velocityOut-of-plane velocity
y x
z
Real velocity

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Mapping Function for Stereo PIVMapping Function for Stereo PIV)()()(
icc xFX =
Camera 1Camera 1 Camera 2Camera 2
Laser SheetLaser Sheet
αα11
αα22
ZZ
XX
2230
229
2228
327
226
225
324
423
3122
2221
320
419
218
217
21615
214
313
212
211
310
2987
265
243210),,(
zyaxyzazxazyazxyayzxazxayayxazxayxaxayzaxzazyaxyzazxayaxyayxaxazayzaxzayaxyaxazayaxaazyxF
++++++++++++++++++++++++++++++=
ZZ
XXLocation Z=0Location Z=0Location Z=Location Z=--0.5mm0.5mm
Location Z=0.5mmLocation Z=0.5mm
Laser light sheetLaser light sheet
a. image from the left camera b. image from the right camera a. image from the left camera b. image from the right camera

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Flow Chart for Stereo PIV measurementsFlow Chart for Stereo PIV measurements
CrossCross--CorrelationCorrelationoperation by usingoperation by usingHRHR--PIV method toPIV method tocalculate calculate DDXX LL, , DDYY LL
CrossCross--CorrelationCorrelationoperation by usingoperation by usingHRHR-- PIVmethodPIVmethod totocalculate calculate DDXX RR, , DDYY RR
InIn--situ calibration forsitu calibration forggeneraleneral mapping functionmapping function
XXLL((x,y,zx,y,z), Y), Y LL((x,y,zx,y,z))InIn--situ calibration forsitu calibration for
General mapping functionGeneral mapping functionXXRR((x,y,zx,y,z), Y), Y RR((x,y,zx,y,z))
Grid for Right imageGrid for Right imagerecording camerarecording camera
Grid for left imageGrid for left imagerecording camerarecording camera
Derivatives of the mapping functionDerivatives of the mapping functiondXdX LL((x,y,zx,y,z)/)/ dxdx, , dXdX LL((x,y,zx,y,z)/)/ dydy, , dXdX LL((x,y,zx,y,z)/)/ dzdz,,dYdY LL((x,y,zx,y,z)/)/ dxdx, , dYdY LL((x,y,zx,y,z)/)/ dydy, , dYdY LL((x,y,zx,y,z)/)/ dzdz,,
Derivatives of the mapping functionDerivatives of the mapping functiondXdX RR((x,y,zx,y,z)/)/ dxdx, , dXdX RR((x,y,zx,y,z)/)/ dydy, , dXdX RR((x,y,zx,y,z)/)/ dzdz,,dYdY RR((x,y,zx,y,z)/)/ dxdx, , dYdY RR((x,y,zx,y,z)/)/ dydy, , dYdY RR((x,y,zx,y,z)/)/ dzdz,,
ThreeThree--dimensionaldimensionaldisplacement vectordisplacement vector
((DDx, x, DDy, y, DDz) reconstructionz) reconstructionby solving Equation (4by solving Equation (4--2200))with least square methodwith least square method
Calibration imagesCalibration imagesfrom the left imagefrom the left imagerecording camerarecording camera
Calibration imagesCalibration imagesfrom the rightfrom the rightimageimagerecording camerarecording camera
XX LL, Y, Y LL XX RR, Y, Y RR
xx,,y,zy,z xx,,y,zy,z
Coordinate values of the point (Coordinate values of the point ( xx,y,y ))in the objective planein the objective plane
ThreeThree--dimensional displacementdimensional displacementvector (vector ( DDx, x, DDy, y, DDz) at the z) at the the point (the point ( x,yx,y))
PIV images of left cameraPIV images of left camera PIV images of right cameraPIV images of right camera
Differential Differential operationoperation Differential Differential operationoperation
InIn--situ calibration to situ calibration to determine the determine the mapping functionmapping function
To reconstruct the 3To reconstruct the 3--component of the component of the velocity vector using velocity vector using the mapping functionthe mapping function

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Stereoscopic PIV systemStereoscopic PIV system
Measurement region80mm by 80mm
Laser sheet
Lobed nozzle
650mm
650mm
250
250
Synchronizer
Double-pulsed Nd:YAG Laser
optics
Host computer
high-resolution CCD cameras

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Stereoscopic PIV techniqueStereoscopic PIV technique
X P IX E L
YP
IXE
L
0 500 10000
100
200
300
400
500
600
700
800
900
1000
X P IX E L
YP
IXE
L
0 500 10000
100
200
300
400
500
600
700
800
900
1000
Displacement vectors in left camera Displacement vectors in left camera Displacement vectors in right camera Displacement vectors in right camera
a. PIV image from the left cameraa. PIV image from the left camera b. PIV image from the right camerab. PIV image from the right camera

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Stereoscopic PIV techniqueStereoscopic PIV technique
X P IX E L
YP
IXE
L
0 500 10000
100
200
300
400
500
600
700
800
900
1000
X P IX E L
YP
IXE
L
0 500 10000
100
200
300
400
500
600
700
800
900
1000
Displacement vectors in left camera Displacement vectors in left camera Displacement vectors in right camera Displacement vectors in right camera
-30-20
-100
1020
30X mm
-30
-20
-10
0
10
20
30
Ym
m
X
Y
Z W m/s20.0019.0018.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.003.00
20 m/s

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Measurements ResultsMeasurements Results
-30-20
-100
-40
-30
-20
-10
0
10
20
30
Ym
m
X
Y
Z
W m/s18.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.003.002.00
X mm
Ym
m
-20 0 20 40-40
-30
-20
-10
0
10
20
30
40
W m/s18.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.003.002.00
10 m/s
-30-20
-100
1020X m
-40
-30
-20
-10
0
10
20
30
40
Ym
m
X
Y
Z
W m/s18.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.003.002.00 X mm
Ym
m
-40 -20 0 20 40-40
-30
-20
-10
0
10
20
30
18.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.003.002.00
10 m/s
a. instantaneous velocitya. instantaneous velocity b. instantaneous velocity (Xb. instantaneous velocity (X--Y plane view)Y plane view)
c. ensemblec. ensemble--averaged velocityaveraged velocity d. ensembled. ensemble--averegedavereged velocity(Xvelocity(X--Y plane view)Y plane view)

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
ParticleParticle--based techniques: Particle Image based techniques: Particle Image VelocimetryVelocimetry (PIV)(PIV)• To seed fluid flows with small tracer particles (~µm), and assume the tracer particles moving with the same
velocity as the low fluid flows.• To measure the displacements (ΔL) of the tracer particles between known time interval (Δt). The local
velocity of fluid flow is calculated by U= Δ L/Δt .
A. t=tA. t=t00 B. t=tB. t=t00+4ms+4ms
Classic 2Classic 2--D PIV measurementD PIV measurement
-50 0 50 100 150 200 250 300-50
0
50
100
150
200-25.00 -20.00 -15.00 -10.00 -5.00 0.00 5.00 10.00 15.00 20.00 25.00
Spanwise Vorticity ( Z-direction )
Re =6,700
Uin = 0.33 m/s
X mm
Ym
m
Uou
t
water free surface
Camera 1 Camera 2
Laser Sheet
α1
α2
Z
X
X PIXEL
YP
IXE
L
0 500 10000
100
200
300
400
500
600
700
800
900
1000
X PIXEL
YP
IXE
L
0 500 10000
100
200
300
400
500
600
700
800
900
1000
Displacement vectors in left camera Displacement vectors in right camera
-40-30
-20-10
010
2030X m
-40
-30
-20
-10
0
10
20
30
Ym
m
X
Y
Z
W m/s20.0019.0018.0017.0016.0015.0014.0013.0012.0011.0010.009.008.007.006.005.004.00
C. Derived Velocity fieldC. Derived Velocity field
Stereoscopic PIV measurementStereoscopic PIV measurement

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
DualDual--plane Stereoscopic PIV System!? plane Stereoscopic PIV System!? Why???Why???
•• Vorticity vector is defined as the curl of the velocity Vorticity vector is defined as the curl of the velocity vector vector ::
•• Simultaneous measurementsSimultaneous measurements of velocity vectors of velocity vectors (three(three--components) at least components) at least at two at two spatially separated spatially separated planesplanes are need in order to get all threeare need in order to get all three--components components of vorticity vectors. of vorticity vectors.
•• Development of a Development of a DualDual--plane Stereoscopic PIV plane Stereoscopic PIV systemsystem to achieve the stereoscopic PIV to achieve the stereoscopic PIV measurements at two parallel planes measurements at two parallel planes simultaneously.simultaneously.
;yu
xv
z ∂∂
−∂∂
=ϖ
Measurement plane
““ClassicalClassical”” PIV or SPIV systems can only PIV or SPIV systems can only provide measurement results in one single provide measurement results in one single
plane instantaneouslyplane instantaneously
z
xy
Measurement plane 1
DualDual--plane Stereoscopic PIV system can plane Stereoscopic PIV system can achieve stereoscopic PIV measurements at achieve stereoscopic PIV measurements at
two parallel planes simultaneouslytwo parallel planes simultaneously
Measurement plane2
z
xy
xw
zu
zv
yw
yx ∂∂
−∂∂
=∂∂
−∂∂
= ϖϖ ;

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
DualDual--plane Stereoscopic PIV System!? plane Stereoscopic PIV System!? How???How???
•• Key point for the simultaneous Key point for the simultaneous stereoscopic PIV measurements at two stereoscopic PIV measurements at two parallel planes is to achieve parallel planes is to achieve scattering scattering light separation.light separation.
Measurement plane 1Measurement plane 1
The scattering light signals from two The scattering light signals from two measurement planes will be mixed measurement planes will be mixed
without special considerationwithout special consideration
Measurement plane2Measurement plane2
zz
xxyy
polarization separation methodpolarization separation method
PP-- polarization(horizontal)polarization(horizontal)
SS-- polarization(vertical)polarization(vertical)
zz
xxyy
•• polarization separation method.polarization separation method.
•• The polarization of Mie scattering light The polarization of Mie scattering light is conservative in air.is conservative in air.
Color 1Color 1
Color 2Color 2Color (wavelength) separation methodColor (wavelength) separation method
zz
xxyy•• color (wavelength) separation methodcolor (wavelength) separation method..

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Optical SetOptical Set--up for Dualup for Dual--plane SPIV Illumination plane SPIV Illumination
Double-pulsed Nd:YAG laser set A
Double-pulsed Nd:YAG laser set B
8a7b 8b
6aV
5a
7a
Half wave plate 11
10a
Laser tube 1
Laser tube 2
Laser tube 3
Laser tube 4
9a
Mirror 12
9b
6b
10b SHGSHG
Polarizer 13
Mirror 15
Cylindrical lens 14
Laser sheets
V
VV
V(s)
V(s)V
H(p)
H(p)
VV V
V (s)
1 to 4 : laser tube 5,8,11: half wave plate6,9, 10,15: mirror 7,13: polarizer 14: cylinder lens

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
SetSet--up for Dualup for Dual--plane SPIV Image Recordingplane SPIV Image Recording
Vertically polarized laser sheet(S-polarized lights)
Schiemflug condition
Horizontally polarized laser sheet (P-polarized lights)
Camera 3
Mirror
Camera 2
250 250
Polarizing beamsplitter cubes
Camera 1
Lens plane Mirror
Image plane
Camera 4
To laser system
Synchronizer

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
AeroAero--engine:engine:enhance mixing between hot highenhance mixing between hot high--speed flow exhaust from speed flow exhaust from corecore--engineenginewith cold lowwith cold low--speed bypass flowspeed bypass flow•• civilian airplanes: civilian airplanes: reduce jet noise during takereduce jet noise during take--off and landingoff and landingthrust augmentationthrust augmentation
•• Military airplanes: Military airplanes: reduce the length of the hot plume, therefore, reduce the length of the hot plume, therefore, reduce the infrared emission signals to improve reduce the infrared emission signals to improve its survivability from the attack of infrared its survivability from the attack of infrared guided missiles. guided missiles.
Combustion: Combustion: enhance mixing between the fuel with enhance mixing between the fuel with air in the combustion chamberair in the combustion chamber•• improve combustion efficiencyimprove combustion efficiency•• suppression pollutant formationsuppression pollutant formation
Concept of Lobed Mixer/NozzleConcept of Lobed Mixer/Nozzle
Lobed mixer/nozzle Lobed mixer/nozzle
NASA modelNASA model
Turbo-fan aero-engine

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Vortex Structures Downstream a Lobed Mixer/NozzleVortex Structures Downstream a Lobed Mixer/Nozzle
The lobed nozzle The lobed nozzle used in the present studyused in the present study
Two kinds of vortex structures are considered to play important Two kinds of vortex structures are considered to play important roles for the roles for the mixing enhancement in a lobed mixing flow:mixing enhancement in a lobed mixing flow:•• AzimuthalAzimuthal ((spanwisespanwise) vortex structures) vortex structures due to the Kelvindue to the Kelvin--Helmholtz Helmholtz
instability at the interface between two streams.instability at the interface between two streams.•• LargeLarge--scale scale streamwisestreamwise vorticesvortices generated by the special geometry of the generated by the special geometry of the
lobed trailing edgelobed trailing edge

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Laser Induced Fluorescence (LIF) Flow Visualization Laser Induced Fluorescence (LIF) Flow Visualization (Axial Slices, Re=6,000)(Axial Slices, Re=6,000)
Lobe trough sliceLobe peak slice
Lobe trough sliceLobe peak slice

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!X/D=1.0 X/D=1.5 X/D=2.0
X/D=0.25 X/D=0.5 X/D=0.75
Laser Induced Fluorescence (LIF) Flow Visualization (Cross Sections, Re=3,000)

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Measurement region80mm by 80mm
Laser sheet with P-polarization direction
Lobed nozzle
650mm
650mm
25 0
25 0
Synchronizer
cylinder lens Host computer
high-resolution CCD camera 3
Double-pulsed
Nd:YAG Laser set A
Polarizer cube
Polarizing beam splitter cubes
Mirror #3
Mirror #4
Half wave (λ/2) plateMirror #1
Mirror #2
high-resolution CCD camera 1
Laser sheet withS-polarization direction
S-polarized laser beamP-polarized laser beam
high-resolution CCD camera 2
high-resolution CCD camera 4
Double-pulsed
Nd:YAG Laser set B
Experimental SetExperimental Set--upup
Flow condition :Flow condition :UUjetjet = 20 m/s= 20 m/sD = 40 mmD = 40 mmRe= 60,000Re= 60,000
Centrifugal compressor
Cylindricalplenum chamber
Convergent connection
Test nozzle
Two-dimension translationmechanism
System setupSystem setup
Jet supply systemJet supply system

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!-30
-20-10
010
2030
X mm
-30
-20
-10
0
10
20
30
Ym
m
X
Y
Z W m/s20.0019.0018.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.003.00
20 m/s
A. Instantaneous velocity field at Z=10mm plane
B. the simultaneous velocity field at Z=12mm plane
The Simultaneous Measurement Results of theThe Simultaneous Measurement Results of theDualDual--plane Stereoscopic PIV System at Two Parallel Planesplane Stereoscopic PIV System at Two Parallel Planes
-30-20
-100
1020
30X mm
-30
-20
-10
0
10
20
30
Ym
m
X
Y
Z W m/s20.0019.0018.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.003.00
20 m/s

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Distributions of Three Components of Vorticity VectorsDistributions of Three Components of Vorticity Vectors
-11.
0
-11.0
-11.0
-11.0
-9.0
-9.0-9.0
-9.0
-7.0
-7.0-7.0
-7.0
-7.0
-7.0
-5.0
-5.0
-5.0
-5.0
-5.0
-3.0
-3.0
-3.0 -3.0
-3.0
-3.0
-1.0
-1.0
-1.0
-1.0
-1.0
-1.0
-1.0
-1.0
1.0
1.0
1.01.
0
1.0
1.0
3.0
3.0
3.0
3.0
3.0
5.0
5.0
5.0
5.0
7.0
7.0
7.0
7.0
7.0
9.0
9.0
9.0
9.0
9.0
11.0
11.0
11.0
11.0
11.0
X mmY
mm
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
11.009.007.005.003.001.00
-1.00-3.00-5.00-7.00-9.00
-11.00
Vorticity distribution(Y-component)
-11.0
-7.0
-7.0
-5.0
-5.0
-3.0
-3.0
-3.0
-3.0
-1.0
-1.0
-1.0
-1.0
-1.0
-1.0
-1.0
1.0
1.0
1.01.0
1.0
1.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
5.0
5.0
5.0
5.0
5.0
5.0
5.0
7.0
7.0 7.0
7.0
9.011.0
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
11.009.007.005.003.001.00
-1.00-3.00-5.00-7.00-9.00
-11.00
Vorticity distribution(X-component)
X mmY
mm
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
15.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.00
Vorticity distribution(in-plane)
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
4.503.502.501.500.50
-0.50-1.50-2.50-3.50-4.50
Vorticity distribution(Z-component)
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
15.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.00
Vorticity distribution(in-plane)
d. instantaneous azimuthal vorticity22
yxplanein ϖϖϖ +=−
f. ensemble-averaged azimuthal
vorticity 22yxplanein ϖϖϖ +=−
e. ensemble-averaged streamwise
vorticity zϖ
-4.5
-4.5
-3.5
-2.5
-2.5
-2.5 -2.5
-1.5
-1.5
-1.5
-0.5-0.5
-0.5
-0.5
-0.5
-0.5
-0.5
-0.5
0.5
0.50.5
0.5
0.5
1.5
1.5
1.5
1.5
2.53.5
4.5
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
4.503.502.501.500.50
-0.50-1.50-2.50-3.50-4.50
Vorticity distribution(Z-component)
c. instantaneous streamwise vorticity zϖb. instantaneous vorticity yϖa. instantaneous vorticity xϖ

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
-40-30
-20-10
010
2030
X mm
-30
-20
-10
0
10
20
30
Ym
m
X
Y
Z
W m/s20.0019.0018.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.003.002.00
-40-30
-20-10
010
2030
X mm
-30
-20
-10
0
10
20
30
Ym
m
X
Y
Z
W m/s20.0019.0018.0017.0016.0015.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.003.002.00
Z=40mm plane
Measurement Results of the DualMeasurement Results of the Dual--plane Stereoscopic PIV Systemplane Stereoscopic PIV System
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
4.503.502.501.500.50
-0.50-1.50-2.50-3.50-4.50
Vorticity distribution(Z-component)
10.0 m/s
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
12.0011.0010.00
9.008.007.006.005.004.003.00
Vorticity distribution(in-plane)
10.0 m/s
Z=42mm plane

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
a. three-dimensional velocity vectors b.iso-surface of velocity field
Reconstructed ThreeReconstructed Three--dimensional Flow Fielddimensional Flow Field
Lobed mixerLobed mixer

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
a. Z=10mm cross planea. Z=10mm cross plane(Z/D=0.25)(Z/D=0.25)
b. b. Z=20mm cross planeZ=20mm cross plane(Z/D=0.50)(Z/D=0.50)
Evolution of Evolution of SpanwiseSpanwise KelvinKelvin--Helmholtz Vortex StructuresHelmholtz Vortex Structures
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
15.0014.0013.0012.0011.0010.00
9.008.007.006.005.004.00
Vorticity distribution(in-plane)
X mmY
mm
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
10.009.008.007.006.005.004.003.002.00
Vorticity distribution(in-plane)
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
6.005.605.204.804.404.003.603.202.802.402.00
Vorticity distribution(in-plane)
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
6.005.605.204.804.404.003.603.202.802.402.00
Vorticity distribution(in-plane)
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
6.005.605.204.804.404.003.603.202.802.402.00
Vorticity distribution(in-plane)
X mm
Ym
m
-40 -20 0 20 40
-30
-20
-10
0
10
20
30
40
6.005.605.204.804.404.003.603.202.802.402.00
Vorticity distribution(in-plane)
c. Z=40mm cross planec. Z=40mm cross plane(Z/D=1.0)(Z/D=1.0)
d. Z=60mm cross planed. Z=60mm cross plane(Z/D=1.5)(Z/D=1.5)
e. Z=80mm cross planee. Z=80mm cross plane(Z/D=2.0)(Z/D=2.0)
f. Z=120mm cross planef. Z=120mm cross plane(Z/D=3.0)(Z/D=3.0)
pinch-off
broken down dissipated
grow up

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
a. Z=10mm cross planea. Z=10mm cross plane(Z/D=0.25)(Z/D=0.25)
b. b. Z=20mm cross planeZ=20mm cross plane(Z/D=0.50)(Z/D=0.50)
Evolution of LargeEvolution of Large--scale scale StreamwiseStreamwise Vortex StructuresVortex Structures
c. Z=40mm cross planec. Z=40mm cross plane(Z/D=1.0)(Z/D=1.0)
d. Z=60mm cross planed. Z=60mm cross plane(Z/D=1.5)(Z/D=1.5)
e. Z=80mm cross planee. Z=80mm cross plane(Z/D=2.0)(Z/D=2.0)
f. Z=120mm cross planef. Z=120mm cross plane(Z/D=3.0)(Z/D=3.0)
X mm
Ym
m
-40 -20 0 20 40 60-40
-30
-20
-10
0
10
20
30
40
4.503.502.501.500.50
-0.50-1.50-2.50-3.50-4.50
Streamwise Vortcitity
X mm
Ym
m
-40 -20 0 20 40 60-40
-30
-20
-10
0
10
20
30
40
4.503.502.501.500.50
-0.50-1.50-2.50-3.50-4.50
Streamwise Vortcitity
X mm
Ym
m
-40 -20 0 20 40 60-40
-30
-20
-10
0
10
20
30
40
2.501.791.070.36
-0.36-1.07-1.79-2.50
Streamwise Vortcitity
X mm
Ym
m
-40 -20 0 20 40 60-40
-30
-20
-10
0
10
20
30
40
2.501.791.070.36
-0.36-1.07-1.79-2.50
Streamwise Vortcitity
X mm
Ym
m
-40 -20 0 20 40 60-40
-30
-20
-10
0
10
20
30
40
2.501.791.070.36
-0.36-1.07-1.79-2.50
Streamwise Vortcitity
X mm
Ym
m
-40 -20 0 20 40 60-40
-30
-20
-10
0
10
20
30
40
2.501.791.070.36
-0.36-1.07-1.79-2.50
Streamwise Vortcitity
grow up
dissipated

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Comparison of DualComparison of Dual--plane Stereoscopic PIV and LDV resultsplane Stereoscopic PIV and LDV results
Lobed nozzle
Laser sheet
LDV probe
CCD cameras
Measurement region650mm
650mm250
250
-5
0
5
10
15
20
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00
time (s)
Vel
ocity (m
/s)
V-SPIV W-SPIV W-LDV V-LDV
Stereoscopic PIV measurement Results LDV measurement resultsEnsemble-averaged
out-of-planeVelocity W(m/s)
Deviation of the out-of-plane velocity
component STD(W)
Ensemble-averaged out-of-plane Velocity W
(m/s)
Deviation of theout-of-plane
velocity componentSTD(W)
WSPIV –WLDV
Point A(0,0,20)
17.271 0.600 16.973 0.640 0.298(1.7%)One laser sheet
on the other off Point B(0,0,40)
17.220 0.889 16.930 0.844 0.290(1.7%)
Point A(0,0,20)
17.126 0.581 16.904 0.509 0.222(1.3%)
Two lasersheets on
simultaneously Point B(0,0,40)
17.213 1.006 16.864 0.856 0.349(2.0%)

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Mass Conservation EquationMass Conservation Equation
X mm
Ym
m
-40 -20 0 20 40 60-40
-30
-20
-10
0
10
20
30
40
1.200.930.670.400.13
-0.13-0.40-0.67-0.93-1.20
Error level in the massconservation equation
X mm
Ym
m
-40 -20 0 20 40 60-40
-30
-20
-10
0
10
20
30
40
0.450.350.250.150.05
-0.05-0.15-0.25-0.35-0.45
Error Level in the massconservation equation
Instantaneous distributionInstantaneous distribution(averaged value Q=0.35)(averaged value Q=0.35)
(equivalent error velocity (equivalent error velocity ΔΔw/Uw/U00=1.75%=1.75%))
ensembleensemble--averaged distributionaveraged distribution(averaged value Q=0.13)(averaged value Q=0.13)
(equivalent error velocity (equivalent error velocity ΔΔw/Uw/U00=0.65%=0.65%))
)(0 z
wyv
xu
UDQ
∂∂
+∂∂
+∂∂
= Z=40mm cross plane

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
3D3D--PTV TechniquesPTV Techniques
System setSystem set--upup measurement result of the flowmeasurement result of the flowover a over a ribletriblet surface surface
(Suzuki, (Suzuki, KasagiKasagi, 2000), 2000)

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
33--D PTVD PTV
((WillneffWillneff, ETH Zurich. 2003) , ETH Zurich. 2003)

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Holographic PIV (HPIV) techniqueHolographic PIV (HPIV) technique
Recording systemRecording system
reconstruction systemreconstruction system
A typical instantaneous HPIV result by J. A typical instantaneous HPIV result by J. Katz group @ JHUKatz group @ JHU

Copyright Copyright ©© by Dr. Hui Hu @ Iowa State University. All Rights Reserved!by Dr. Hui Hu @ Iowa State University. All Rights Reserved!
Defocusing digital particle image Defocusing digital particle image velocimetryvelocimetry (DDPIV)(DDPIV)
Defocusing conceptDefocusing concept
M. M. GharibGharib group @ California group @ California Institute of TechnologyInstitute of Technology