Embed Size (px)
Citation preview

RS – EC2 - Lecture 13
1
1
Lecture 13Time Series:
Stationarity, AR(p) & MA(q)
Time Series: Introduction
• In the early 1970’s, it was discovered that simple time series models performed better than the complicated multivarate, then popular, 1960s macro models (FRB-MIT-Penn). See, Nelson (1972).
• The tools? Simple univariate (ARIMA) models, popularized by the textbook of Box & Jenkins (1970).
Q: What is a time series? A time series yt is a process observed in sequence over time, t = 1,...., T => Yt={y1, y2 , y3, ..., yT}
• Because of the sequential nature of Yt, we expect that yt and yt-1 to be dependent. Then, classical assumptions are not valid.
RS – EC2 - Lecture 13
2
• Usually, time series models are separated into two categories:
- univariate (yt Є R, it is scalar)
=> primary model: Autoregressions (ARs).
- multivariate (yt Є Rm, it vector-valued).
=> primary model: Vectot autoregressions (VARs).
• In time series, {..., y1, y2 , y3, ..., yT} are jointly RV. We want to model the conditional expectation:
E[yt| Ft-1]
where Ft-1 = {yt-1, yt-2 , yt-3, ...} is the past history of the series.
Time Series: Introduction
• Two popular models for E[yt|Ft-1]:
- An autoregressive (AR) process models E[yt|Ft-1] with lagged dependent variables.
• A moving average (MA) process models E[yt|Ft-1] with lagged errros.
• Usually, E[yt|Ft-1] has been modeled as a linear process. But, in recent times, non-linearities have become more common.
• In general, we assume the error term, εt, is uncorrelated, with mean 0 and constant variance, σ2. We call a process like this a white noise (WN) process. We denote it as
εt ~ WN(0,σ2)
Time Series: Introduction
RS – EC2 - Lecture 13
3
CLM Revisited: Time Series
With autocorrelated data, we get dependent observations. Recall,
t = t-1 + ut
The independence assumption (A2’) is violated. The LLN and the CLT cannot be easily applied, in this context. We need new tools and definitions.
We will introduce the concepts of stationarity and ergodicity. The ergodic theorem will give us a counterpart to the LLN.
To get asymptotic distributions, we also need a CLT for dependent variables, using the concept of mixing and stationarity. Or we can rely on the martingale CLT.
• Consider the joint probability distribution of the collection of RVs:
Then, we say that a process is
),...,(),.....,(221121 nnn ttttttttt zZzZzZPzzzF
1st order stationary if ktanyforzFzF ktt ,)()( 111
Nth-order stationary if
kttanyforzzFzzF ktkttt ,,),(),( 212121
kttanyforzzFzzF nktkttt nn,,).....().....( 111
• Definition. A process is strongly (strictly) stationary if it is a Nth-order stationary process for any N.
2nd order stationary if
Time Series - Stationarity
RS – EC2 - Lecture 13
4
22
2121
21
222
21
221121
)(),(
)()])([(),(
)()()()(
)()(
tt
tttttt
tttttttt
ttttt
tttt
ttZZEZZCov
dzzfZZEZVar
dzzfZZE
Time Series – Moments
• The moments describe a distribution. We calculate the moments as usual.
Note: γ(t1-t2) is called the autocovariance function. γ(0) is the variance.
•Stationarity requires all these moments to be independent of time.
• If the moments are time dependent, we say the series is non-stationary.
• For strictly stationary process: 22and tt
because kttktt zFzF1111
)()(
provided that
k
ktkttt
ktkttt
ktttkttt
ttktt
ktkttt
zzzz
zzFzzF
),(),(),(
then, and let
),(),(
),cov(),cov(
),(),(
21
21
2121
2121
2121
The correlation between any two RVs depends on the time difference.
)(,)( 2tt ZEZE
Then,
Time Series – Moments
RS – EC2 - Lecture 13
5
• A process is said to be N-order weakly stationary if all its joint moments up to order N exist and are time invariant.
• A Covariance stationary process (or 2nd order weakly stationary) has:- constant mean- constant variance- covariance function depends on time difference between R.V.
That is, Zt is covariance stationary if:
Time Series – Weak Stationarity
)()()])([(),(
constant)(
constant)(
2121221121ttfttZZEZZCov
ZVar
ZE
tttttt
t
t
Examples: For all assume εt ~ WN(0,σ2)
1) yt = Φ yt-1 + εt
E[yt ] = 0 (assuming Φ≠1)Var[yt] = σ2/(1-Φ2) (assuming |Φ|<11)E[yt yt-1] = Φ E[yt-1
2]=> stationary, not time dependent
2) yt = μ + yt-1 + εt =>yt = μ t + Σj=0 to t-1 εt-j + y0
E[yt ] = μ t + y0
Var[yt] = Σj=0 to t-1 σ2 = σ2 t=> non-stationary, time dependent
Time Series – Weak Stationarity
RS – EC2 - Lecture 13
6
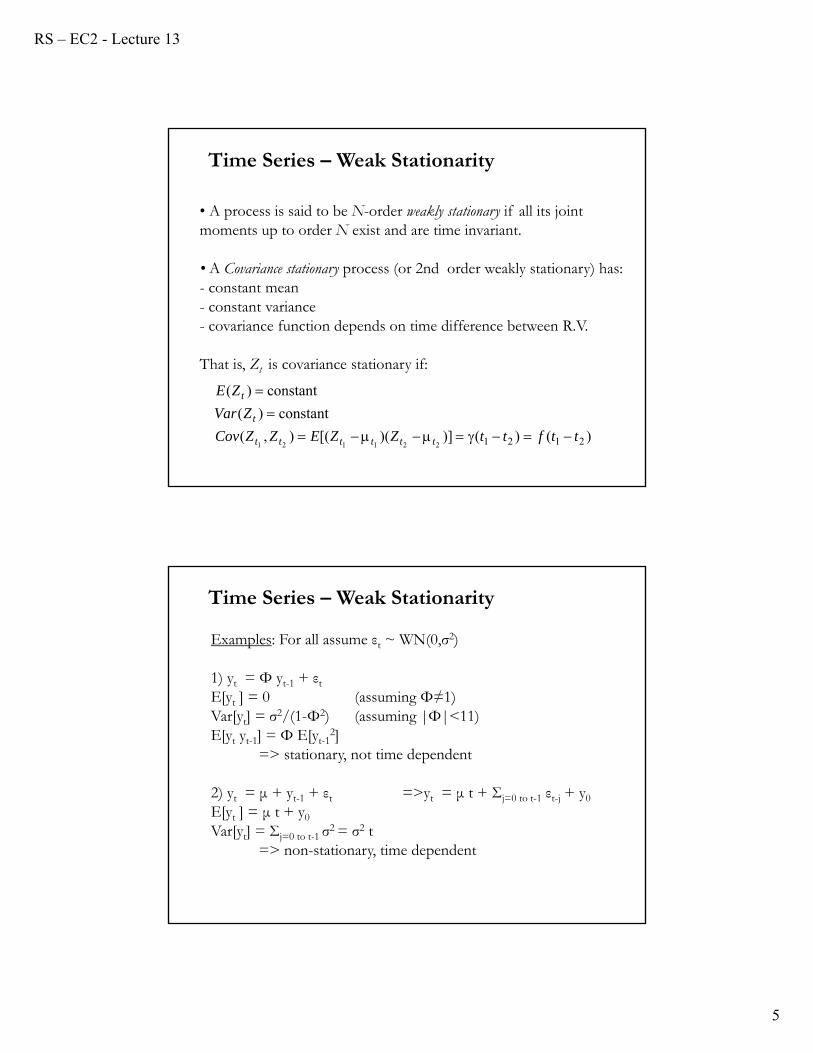
Stationary Series
13.
~4.08.
1
1
ttt
tttt
yy
WNy
Examples:
% Changes in USD/GBP (1978:I-2011:IV)
-0.25-0.2
-0.15-0.1
-0.050
0.050.1
0.150.2
1 9 17 25 33 41 49 57 65 73 81 89 97 105 113 121 129
Time
% c
han
ge
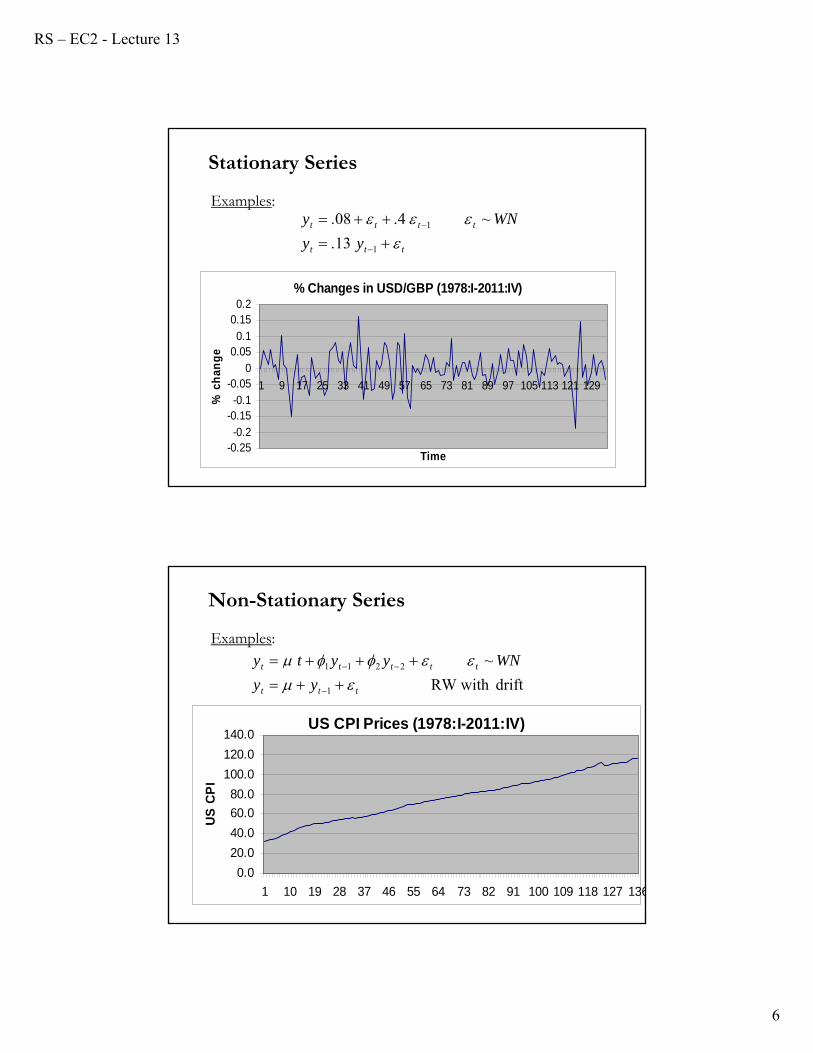
Non-Stationary Series
Examples:
driftRW with
~
1
2211
ttt
ttttt
yy
WNyyty
US CPI Prices (1978:I-2011:IV)
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
1 10 19 28 37 46 55 64 73 82 91 100 109 118 127 136
US
CP
I
RS – EC2 - Lecture 13
7
• We want to allow as much dependence as the LLN allows us to do it.
• But, stationarity is not enough, as the following example shows:
• Example: Let {Ut} be a sequence of i.i.d. RVs uniformly distributed on [0, 1] and let Z be N(0,1) independent of {Ut}.
Define Yt= Z+Ut . Then Yt is stationary (why?), but
The problem is that there is too much dependence in the sequence {Yt} (because of Z). In fact the correlation between Y1 and Yt is always positive for any value of t.
2
1
2
1)(
1
1
pn
tno
n
ttn
ZY
YEYn
Y
Time Series – Ergodicity
• We want to estimate the mean of the process {Zt}, μ(Zt). But, we need to distinguishing between ensemble average and time average:
- Ensemble Average
- Time Series Average
Q: Which estimator is the most appropriate? A: Ensemble Average. But, it is impossible to calculate. We only observe one Zt.
• Q: Under which circumstances we can use the time average (only one realization of {Zt})? Is the time average an unbiased and consistent estimator of the mean? The Ergodic Theorem gives us the answer.
m
Z
z
m
ii
1
n
Zz
n
tt
1
Time Series – Ergodicity of the Mean

RS – EC2 - Lecture 13
8
• Recall the sufficient conditions for consistency of an estimator: the estimator is asymptotically unbiased and its variance asymptotically collapses to zero.
1. Q: Is the time average is asymptotically unbiased? Yes.
t t
t nZE
nzE 1
)(1
)(
2. Q: Is the variance going to zero as T grows? It depends.
)](
)()[(
)(),cov(1
)var(
0)2()1(
210111020
1212
0
1 120
1 12
nn
nn
n
tnttt
n
t
n
sst
n
t
n
sst
n
nnZZ
nz
Time Series – Ergodicity of the Mean
0)1(lim)var(lim
)1()()var(
?0
1
)1(
020
kk
nn
n
nk kkk
n
k
nz
n
k
nkn
nz
• If the Zt were uncorrelated, the variance of the time average would be O(n-1). Since independent random variables are necessarily uncorrelated (but not vice versa), we have just recovered a form of the LLN for independent data.
Q: How can we make the remaining part, the sum over the upper triangle of the covariance matrix, go to zero as well? A: We need to impose conditions on ρk. Conditions weaker than "they are all zero;" but, strong enough to exclude the sequence of identical copies.
Time Series – Ergodicity of the Mean

RS – EC2 - Lecture 13
9
• Definition: A covariance-stationary process is ergodic for the mean if
)(lim tZEzp
Ergodicity Theorem: Then, a sufficient condition for ergodicity for the mean is
k as 0k
1
1
11
1
11
1
1 kk
n
t
tn
kk
n
t
tn
kk
n
t
• We use two inequalities to put upper bounds on the variance of the time average:
Covariances can be negative, so we upper-bound the sum of the actual covariances by the sum of their magnitudes. Then, we extend the inner sum so it covers all lags. This might of course be infinite (sequence-of-identical-copies).
Time Series – Ergodicity of the Mean
• Ergodicity under Gaussian DistributionIf {Zt}is a stationary Gaussian process,
is sufficient to ensure ergodicity for all moments.
Note: Recall that only the first two moments are needed to describe the normal distribution.
k
k
• A sufficient condition to ensure ergodicity for second moments is:
A process which is ergodic in the first and second moments is usually referred as ergodic in the wide sense .
k
k
Time Series – Ergodicity of 2nd Moments
RS – EC2 - Lecture 13
10
• We state two essential theorems to the analysis of stationary time series. Difficult to prove in general.
Theorem IIf yt is strictly stationary and ergodic and xt = f(yt, yt-1, yt-2 , ...) is a RV, then xt is strictly stationary and ergodic.
Theorem II (Ergodic Theorem)If yt is strictly stationary and ergodic and E[yt] <∞; then as T→ ∞;
• These results allow us to consistently estimate parameters using time-series moments.
Time Series – Ergodicity – Theorems
][1
tp
tt yEy
T
• Definition: εt is a martingale difference sequence (MDS) if
E[εt| Ft-1]=0.
• Regression errors are naturally a MDS. Some time-series processes may be a MDS as a consequence of optimizing behaviour. For example, most asset pricing models imply that asset returns should be the sum of a constant plus a MDS.
• Useful property: εt is uncorrelated with any function of the lagged information Ft-1. Then, for k > 0 => E[yt-k εt] = 0.
Time Series - MDS
RS – EC2 - Lecture 13
11
Theorem (MDS CLT)
If ut is a strictly stationary and ergodic MDS and E(ut ut’)=Ω<∞; then as T→ ∞;
• Application: Let xt ={yt-1, yt-2 , ... }, a vector of lagged yt’s.
Then (xtεt) is a MDS. We can apply the MDS CLT Theorem. Then,
• Like in the derivation of asymptotic distribution of OLS, the above result is the key to establish the asymptotic distribution in a time series context.
Time Series – MDS CLT
),0(1
NuT
d
tt
]'[),,0(1 2
tttd
ttt xxENx
T
Autoregressive (AR) Process
• We want to model the conditional expectation of yt:
E[yt|Ft-1]
where Ft-1 = {yt-1, yt-2 , yt-3, ...} is the past history of the series. We assume the error term, εt = yt -- E[yt|Ft-1], follows a WN(0,σ2).
• An AR process models E[yt|Ft-1] with lagged dependent variables.
• The most common models are AR models. An AR(1) model involves a single lag, while an AR(p) model involves p lags.
Example: A linear AR(p) model (the most popular in practice):
with E[εt|Ft-1]=0.tptpttt yyyy ....2211
RS – EC2 - Lecture 13
12
• Define the operator L as:
• It is usually called Lag operator. But it can produces lagged or forward variables (for negative values of k). For example:
• Also note that if c is a constant => L c = c.
• Sometimes the notation for L when working as a lag operator is B (backshift operator), and when working as a forward operator is F.
• Important application: Differencing
kttk zzL
AR Process – Lag Operator
33
tt zzL
td
td
tttt
zLz
zzzLz
)1(
)1( 1
• Let’s work with the linear AR(p) model is:
• We can write this process as:
Φ(L) is called the autoregressive polynomial of yt. Note that
delivers an infinite sum on the εt-j’s => an MA(∞) process!
• Q: Can we do this inversion?
)()( 1tt Ly
pptt LLLLyL ....1)( where )( 2
211
operator Lag :L
....
1
12211
tti
p
iit
tit
p
iitptpttt
yLy
yyyyy
Autoregressive (AR) Process
RS – EC2 - Lecture 13
13
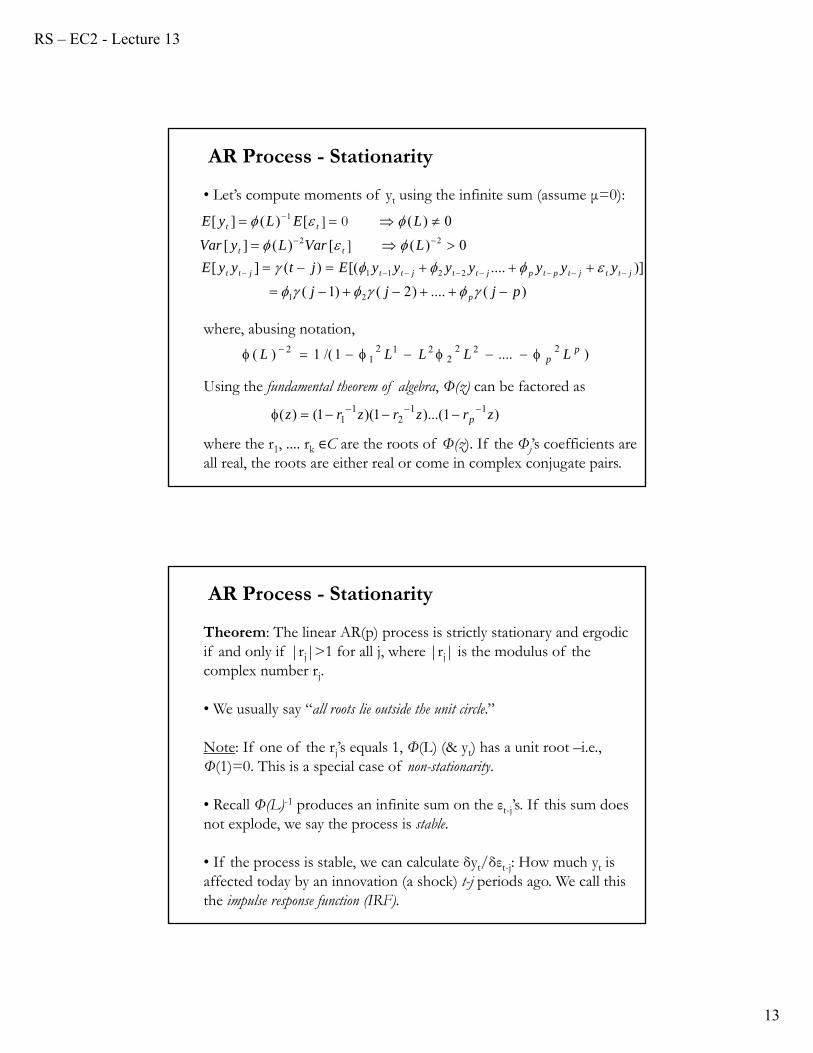
• Let’s compute moments of yt using the infinite sum (assume μ=0):
where, abusing notation,
Using the fundamental theorem of algebra, Φ(z) can be factored as
where the r1, .... rk ∈C are the roots of Φ(z). If the Φj’s coefficients are all real, the roots are either real or come in complex conjugate pairs.
AR Process - Stationarity
)(....)2()1(
)]....[()(][
0)([)(][
0)([)(][
21
2211
22
1
pjjj
yyyyyyyEjtyyE
LVarLyVar
LELyE
p
jttjtptpjttjttjtt
tt
tt
]
0]
)1)...(1)(1()( 112
11 zrzrzrz p
)....1/(1)( 2222
2121
2 pp LLLLL
Theorem: The linear AR(p) process is strictly stationary and ergodic if and only if |rj|>1 for all j, where |rj| is the modulus of the complex number rj.
• We usually say “all roots lie outside the unit circle.”
Note: If one of the rj’s equals 1, Φ(L) (& yt) has a unit root –i.e., Φ(1)=0. This is a special case of non-stationarity.
• Recall Φ(L)-1 produces an infinite sum on the εt-j’s. If this sum does not explode, we say the process is stable.
• If the process is stable, we can calculate δyt/δεt-j: How much yt is affected today by an innovation (a shock) t-j periods ago. We call this the impulse response function (IRF).
AR Process - Stationarity
RS – EC2 - Lecture 13
14
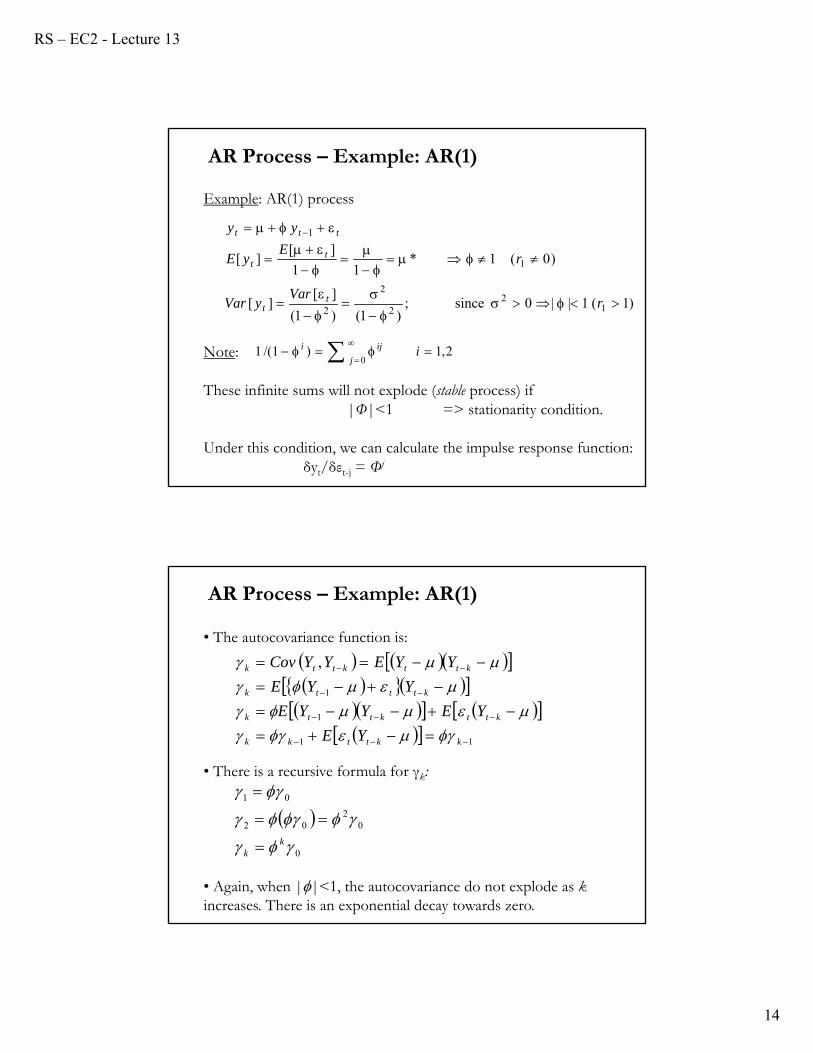
Example: AR(1) process
Note:
These infinite sums will not explode (stable process) if |Φ|<1 => stationarity condition.
Under this condition, we can calculate the impulse response function:δyt/δεt-j = Φj
AR Process – Example: AR(1)
)1(1||0since;)1()1(
][][
)0(1*11
][][
12
2
2
2
1
1
rVar
yVar
rE
yE
yy
tt
tt
ttt
2,1)1/(10
i
j
iji
• The autocovariance function is:
• There is a recursive formula for γk:
• Again, when ||<1, the autocovariance do not explode as k increases. There is an exponential decay towards zero.
AR Process – Example: AR(1)
11
1
1
,
kkttkk
kttkttk
ktttk
kttkttk
YE
YEYYE
YYE
YYEYYCov
0
02
02
01
kk
RS – EC2 - Lecture 13
15
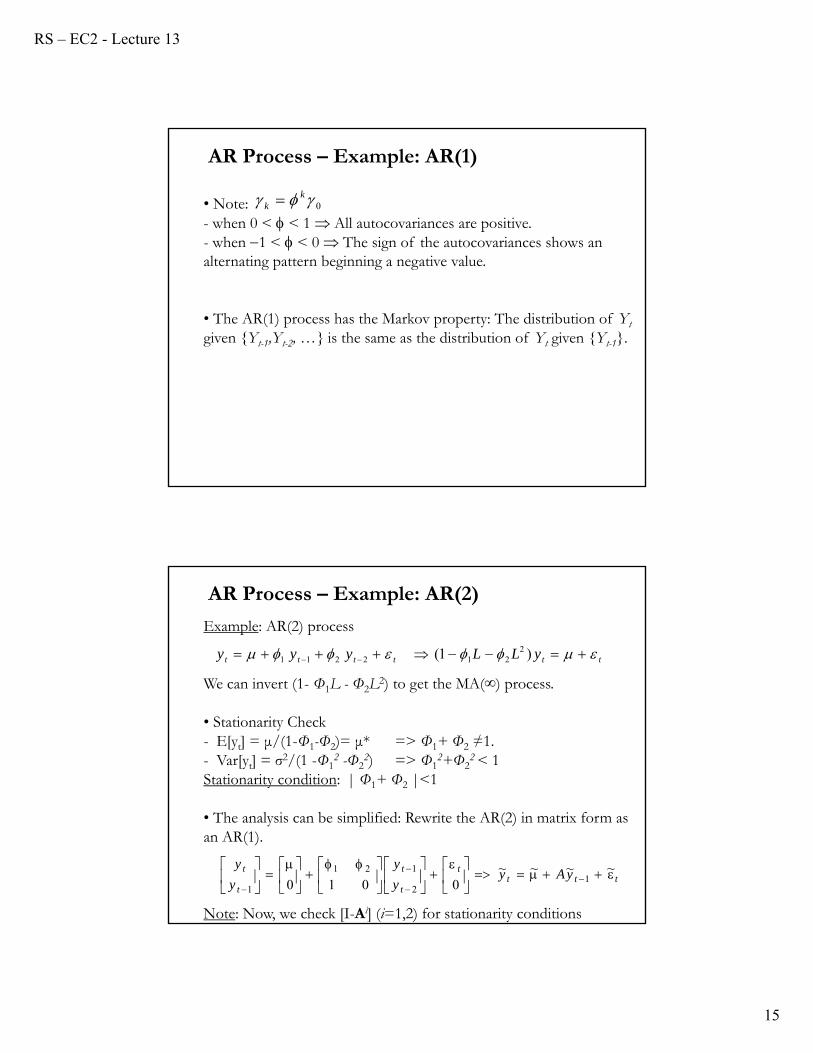
• Note:- when 0 < < 1 All autocovariances are positive.- when 1 < < 0 The sign of the autocovariances shows an alternating pattern beginning a negative value.
• The AR(1) process has the Markov property: The distribution of Yt
given {Yt-1,Yt-2, …} is the same as the distribution of Yt given {Yt-1}.
AR Process – Example: AR(1)
0 kk
Example: AR(2) process
We can invert (1- Φ1L - Φ2L2) to get the MA(∞) process.
• Stationarity Check- E[yt] = μ/(1-Φ1-Φ2)= μ* => Φ1+ Φ2 ≠1.- Var[yt] = σ2/(1 -Φ1
2 -Φ22) => Φ1
2+Φ22 < 1
Stationarity condition: | Φ1+ Φ2 |<1
• The analysis can be simplified: Rewrite the AR(2) in matrix form as an AR(1).
Note: Now, we check [I-Ai] (i=1,2) for stationarity conditions
AR Process – Example: AR(2)
tttttt yLLyyy )1( 2212211
tttt
t
t
t
t yAyy
y
y
y
~~~~0010 1
2
121
1
RS – EC2 - Lecture 13
16
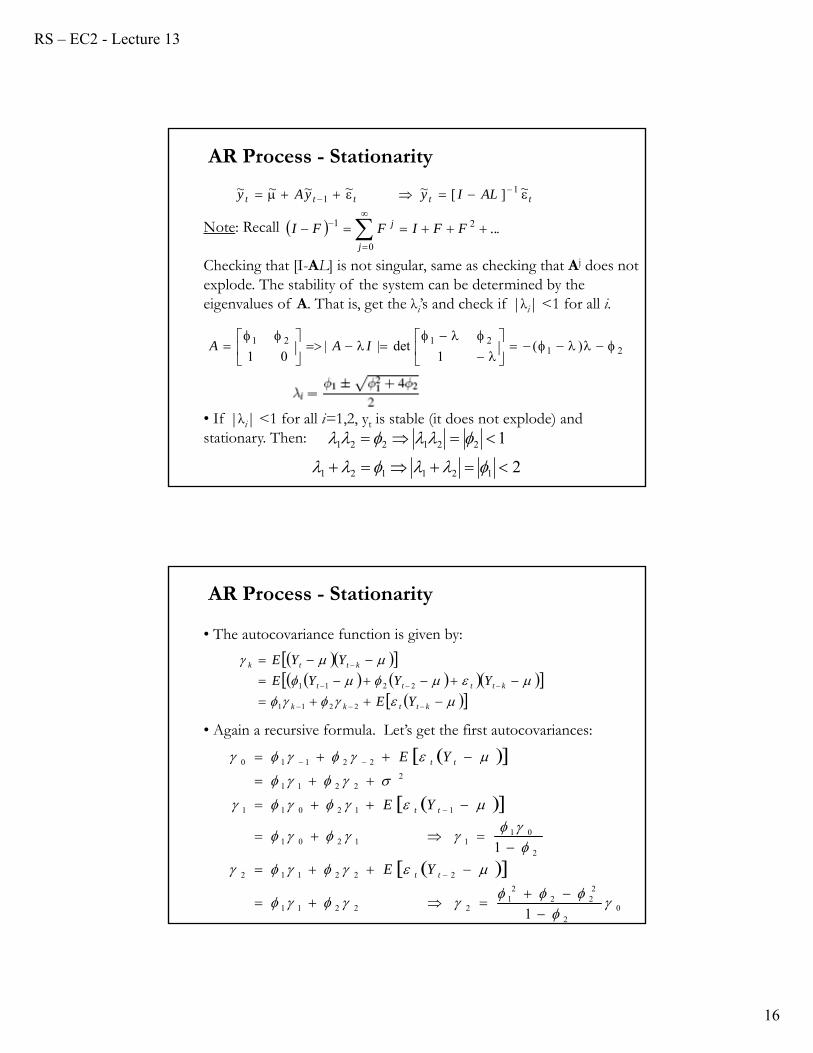
Note: Recall
Checking that [I-AL] is not singular, same as checking that Aj does not explode. The stability of the system can be determined by the eigenvalues of A. That is, get the λi’s and check if |λi| <1 for all i.
• If |λi| <1 for all i=1,2, yt is stable (it does not explode) and stationary. Then:
AR Process - Stationarity
212121 )(
1det||
01
IAA
.2
0
1 ..FFIFFIj
j
ttttt ALIyyAy
~][~~~~~ 11
2
1
121121
221221
• The autocovariance function is given by:
• Again a recursive formula. Let’s get the first autocovariances:
AR Process - Stationarity
kttkk
ktttt
kttk
YE
YYYE
YYE
2211
2211
02
222
21
22211
222112
2
0111201
112011
22211
22110
1
1
tt
tt
tt
YE
YE
YE
RS – EC2 - Lecture 13
17
• The AR(2) in matrix AR(1) form is called Vector AR(1) or VAR(1). Nice property: The VAR(1) is Markov -i.e., forecasts depend only on today’s data.
• It is straightforward to apply the VAR formulation to any AR(p) processes. We can also use the same eigenvalue conditions to check the stationarity of AR(p) processes.
AR Process - Stationarity
• The AR(p) model:
Then, => an MA(∞) process!
• But, we need to make sure that we can invert the polynomial Φ(L).
• When Φ(L) ≠0, we say the process yt is causal (strictly speaking, a causal function of {εt}).
Definition: A linear process {yt} is causal if there is a
AR Process - Causality
.)(with
|)(|with
...1)(
0
221
tt
j j
Ly
L
LLL
pptt LLLLyL ....1)( where )( 2
211
),()( 1tt Ly
RS – EC2 - Lecture 13
18
Example: AR(1) process:
Then, yt is causal if and only if: |Φ1| <1
orthe root r1 of the polynomial Φ(z) = 1 − Φ1 z satisfies |r1|>1.
• Q: How do we calculate the ψ‘s coefficientes for an AR(p)? Matching coefficients:
AR Process – Causality
LLyL tt 11)( where ,)(
0,1
1
1
122
11
01
1
1
1
iLL
LL
Y
iit
it
iitt
• Example: AR(2) - Calculating the ψ‘s by matching coefficients.
AR Process – Calculating the ψ’s
We can solve these linear difference equations in several ways:- Numerically- Guess the form of a solution and using an inductive proof, or- Using the theory of linear difference equations.
2,
2
1
2211
213
13
22
12
11
0
jjjj
11 221
LLyLL tt
L

RS – EC2 - Lecture 13
19
• Define
Then the model can be written as
• The OLS estimator is
• Recall that ut= xtεt is a MDS. It is also strictly stationary and ergodic.
• The vector xt is strictly stationary and ergodic, and by Theorem I so is xt xt’. Then, by the Ergodic Theorem
AR Process – Estimation and Properties
)....(
)....1(
21
21
p
ptttt yyyx
ttt xy '
tx yXXXb ')'(ˆ 1
.0][11
tp
t tttt uEu
Tx
T
QxxExxT
ttp
ttt ]'['
1
• Consistency
Putting together the previous results, the OLS estimator can be rewritten as:
Then,
=> the OLS estimator is consistent.
AR Process – Estimation and Properties
tx
ttt
ttt x
Txx
TyXXXb '
1'
1')'(ˆ
1
1
0'1
'1 1
1
QxT
xxT
b p
ttt
ttt
RS – EC2 - Lecture 13
20
• Asymptotic Normality
We apply the MDS CLT to xtεt. Then, it is straightforward to derive the asymptotic distribution of the estimator (similar to the OLS case):
Theorem If the AR(p) process yt is strictly stationary and ergodic
and E[yt4], then as T→ ∞;
• Identical in form to the asymptotic distribution of OLS in cross-section regression => asymptotic inference is the same.
• The asymptotic covariance matrix is estimated just as in the cross-section case: The sandwich estimator.
AR Process – Asymptotic Distribution
]'[),,0()( 211 ttd xxEQQNbT
• So far, we constructed the bootstrap sample by randomly resampling from the data values (yt,xt). This created an i.i.d bootstrap sample.
• This is inappropriate for time-series. (We have dependence.)
• There are two popular methods to bootstrap time series.
(1) Model-Based (Parametric) Bootstrap
(2) Block Resampling Bootstrap
AR Process – Bootstrap
RS – EC2 - Lecture 13
21
(1) Model-Based (Parametric) Bootstrap
1. Estimate b and residuals e:
2. Fix an initial condition {yt-k+1, yt-k+2 , yt-k+3, ..., y0}
3. Simulate i.i.d. draws e* from the empirical distribution of the residuals {e1, e2 , e3, ..., eT}.
4. Create the bootstrap series yt by the recursive formula
Pros: Simple. Similar to the usual bootstrap.
Cons: This construction imposes homoskedasticity on the errors e* ; which may be different than the properties of the actual e. It also imposes the AR(p) as the DGP.
AR Process – Bootstrap
**ˆ....*ˆ*ˆˆ* 2211 tptpttt yyyy
(2) Block Resampling
1. Divide the sample into T/m blocks of length m.
2. Resample complete blocks. For each simulated sample, draw T/mblocks.
3. Paste the blocks together to create the bootstrap time-series yt*.
Pros: It allows for arbitrary stationary serial correlation, heteroskedasticity, and for model misspecification.
Cons: It may be sensitive to the block length, and the way that the data are partitioned into blocks. May not work well in small samples.
AR Process – Bootstrap
RS – EC2 - Lecture 13
22
• An MA process models E[yt|Ft-1] with lagged error terms. An MA(q) model involves q lags.
• We keep the white noise assumption for εt.
Example: A linear MA(q) model:
• Q: Is yt stationary? Check the moments. WLOG, assume μ=0.
Moving Average Process
qqtt
q
it
iit
tit
q
iiqtqtttt
LLLLLLy
y
...1)()(
...
221
1
12211
• Q: Is yt stationary? Check the moments. WLOG, assume μ=0.
• It is easy to verify that the sums are finite => MA(q) is stationary.
• Note that an MA(q) process can generate an AR process.
• We have an infinite sum polynomial on θL. That is, an AR(∞).
Moving Average Process - Stationarity
0. otherwise
)(;||][
)]....[(][)(
)...1(][
0][
1 ||2
2211
2222
21
jtqk
yyyyEyyEjt
yVar
yE
q
j kjj
jttjtqtqjttjttjtt
qt
t
tttt yLLy *)()( 1
tj tj yL
*)(
0
RS – EC2 - Lecture 13
23
• We need to make sure that θ(L)-1 is defined. That is, we require θ(L)≠0. When this condition is met, we can write εt as a causal function of yt. We say the MA is invertible. For this to hold, we require:
Definition: A linear process {yt} is invertible strictly speaking, an invertible function of {εt}, if there is a
MA Process - Invertibility
0|)(|
j j L
.)(with
|)(|with
...1)(
0
221
tt
j j
yL
L
LLL
• Example: MA(1) process:
- Moments
Note: The autocovariance function is zero after lag 1.
- Inveritbility: If |θ1|<1, we can write (1+ θ1 L)-1 yt + μ* = εt
=>
MA Process – Example: MA(1)
1
122
11 )(**...)...1(i
ttitjj yLyLLL
LLLy tt 11)()(
1,0],[
],[
k
2111
221
20
kyyE
yyE
yVar
YE
ktt
tt
t
t
RS – EC2 - Lecture 13
24
• Example: MA(2) process:
- Moments
Note: the autocovariance function is zero after lag 2.
MA Process – Example: MA(2)
2211)()( LLLLy tt
2,0
2,
1,1
0,1
22
22
1
22
21
2
k
k
k
k
YE
k
t
- Inveritbility: The roots of all lie inside the unit circle. It can be shown the invertibility condition for MA(2) process is:
MA Process – Example: MA(2)
0212
11
1
1
2
12
21
RS – EC2 - Lecture 13
25
• MA are more complicated to estimate. In particular, there are nonlinearities. Consider an MA(1):
yt = εt + θ εt-1
The auto-correlation is ρ1 = θ/(1+θ2). Then, MM estimate of θsatisfies:
• A nonlinear solution and difficult to solve.
• Alternatively, if |θ|< 1, we can try a ∈(-1; 1),
and look (numerically) for the least-square estimator
MA Process - Estimation
1
21
21 2
411ˆ)ˆ1(
ˆ
r
rr
...)( 22
1 tttt yayaya
})()(min{argˆ1
2
T
t tTa aaS
Theorem - Wold (1938).Any covariance stationary {yt} has infinite order, moving-average representation:
where
• yt is a linear combination of innovations over time.
• A stationary process can be represented as an MA(∞) plus a deterministic “trend.”
The Wold Decomposition
),0(~
Say, le).forecastab (perfectly termticdeterminis:
2
0
2
WNt
j j
tt
,1, 00
tj t
jjt Ly
RS – EC2 - Lecture 13
26
Example:Let xt= yt-κt. Then, check moments:
Xt is a covariance stationary process.
The Wold Decomposition
0 22
22112
22112211
0
22
0
222
0
...)(
...)...)([(],[
.][][
.0][][][
k kkjjj
jtjtjttttjtt
j jj jtjt
j jtjttt
ExxE
ExE
EyExE
• A combination of AR(p) and MA(q) processes produces an ARMA(p,q) process:
• Usually, we insist that Φ(L)≠0, θ(L)≠0 and that the polynomials Φ(L), θ(L) have no common factors. This implies it is not a lower order ARMA model.
ARMA Process
tt
t
q
it
iiit
p
ii
qtqtttptpttt
LyL
Ly
yyyy
)()(
.......
11
22112211
RS – EC2 - Lecture 13
27
Example: Common factors. Suppose we have the following ARMA(2,3) modelwith
This model simplifies to: => an MA(1) process.
• Pure AR Representation:
• Pure MA Representation:
• Special ARMA(p,q) cases: - p = 0: MA(q)- q = 0: AR(p).
tt Ly )1(
tt LyL )()(
)1)(3.6.1(3.9.4.11)(
3.6.1)(232
2
LLLLLLL
LLL
ARMA Process
L
LLayL
q
ptt
L
LLaLy
p
qtt
Theorem: If Φ(L) and θ(L) have no common factors, a (unique) stationary solution to if and only if
This ARMA(p,q) model is causal if and only if
This ARMA(p,q) model is invertible if and only if
• Note: Real data cannot be exactly modeled using a finite number of parameters. We choose p, q to create a good approximated model.
tt LyL )()(
ARMA: Stationarity, Causality and Invertibility
.0...1)(1|| 221 p
p zzzzz
.0...1)(1|| 221 p
p zzzzz
.0...1)(1|| 221 p
p zzzzz

RS – EC2 - Lecture 13
28
• Consider the ARMA(p,q) model:
Let
Then,
=> xt is a p-th-order linear stochastic difference equation (SDE).
Example: 1st-order SDE (AR(1)):
Recursive solution (Wold form):
where x-1 is an initial condition.
ARMA Process – SDE Representation
)())(( tt LyL
.)(and tttt Lwyx
tptpttt wxxxx ....2211
ttt xx 1
iti
it
iti
ttt xxx
0
11
01
1
• The dynamic multiplier measurers the effect of εt on subsequent values of xt:. That is, the first derivative on the Wold representation:
δxt+j/δεt,= δxj/δε0,= ψj.
For an AR(1) process: δxt+j/δεt,= δxj/δε0,=Φj.
• That is, the dynamic multiplier for any linear SDE depends only on the length of time j, not on time t.
ARMA Process – Dynamic Multiplier
RS – EC2 - Lecture 13
29
• The impulse-response function (IRF) a sequence of dynamic multipliers as a function of time from the one time change in the innovation, εt.
• Usually, IRF are represented with a graph, that measures the effect of the innovation, εt, on yt over time:
δyt+j/δεt+ δyt+j+1/δεt + δyt+j+21/δεt+...=ψj+ ψj+1+ ψj+2+...
• Once we estimate the ARMA coefficients, it is easy to draw an IRF.
ARMA Process – Impulse Response Function
• Q: We add two ARMA process, what order do we get?
• Adding MA processes
- Under independence:
- Then, γ(j) =0 for j> Max(qx,qz,) => yt is ARMA(0,max(qx,qz))
- Implication: MA(2)+MA(1)=MA(2)
ARMA Process – Addition
ttttt
tt
tt
uLCLAzxy
uLCz
LAx
)( )(
)(
)(
)()()][(
)])([(][)(
jjzzxxE
zxzxEyyEj
zxjttjtt
jtjtttjtty
RS – EC2 - Lecture 13
30
• Q: We add two ARMA process, what order do we get?
• Adding AR processes
- Rewrite system as:
- Then, yt is ARMA(px+pz ,max(px,pz))
ARMA Process – Addition
?
))(1(
))(1(
ttt
tt
tt
zxy
uzLC
xLA
])( )([))(1( ))(1())(1))((1(
))(1())(1))((1(
))(1())(1))((1(
ttttttt
tt
tt
uLALCuuLALCyLCLA
uLAzLCLA
LCxLALC