Embed Size (px)
Citation preview

Lec 9. Root Locus Analysis I
• From last lecture, the locations of the closed loop poles have important implication in– Stability– Transient behavior– Steady state error
• When adjusting some parameter, how will the closed loop pole locations be affected?
• Reading: 6.1-6.4

How does
+
closed-loop transfer function
The closed loop transfer function of the unity-feedback system is
with DC gain H(0)=1.
Question: if we only know the closed loop transfer function H(s) with H(0)=1, can we derive the steady state error for unit ramp input directly from H(s)?

Truxal’s Formula
Given a system with (closed loop) transfer function:
satisfying H(0)=1.
The steady state error for tracking unit ramp input is

Application to the Previous Example
+
closed-loop transfer function
Two closed loop poles and no closed loop zeros.

Implication
Suppose that the closed loop zeros are fixed. Then the steady state velocity error ess decreases as the closed loop poles move away from the origin on LHP
Similar formulas can be derived for steady state position error and acceleration error

Characteristic EquationCharacteristic equation is the equation whose roots are closed loop poles
For the feedback system below, the characteristic equation is
+Example:

Characteristic Equation with Parameter
The transfer functions may depend on a parameter K
The characteristic equation and the closed loop poles depend on K.
+Example 1:
+
Example 2:

Another ExampleThe adjustable parameter K could appear elsewhere
+

In General
+
For a feedback control system dependent on a parameter K, the characteristic equation is equivalent to
for some transfer function
Therefore, the closed loop poles are solutions of
+
In terms of closed loop poles (not closed loop transfer function!)

Root LocusRoot locus of a feedback control system with parameter K is the plot of all closed loop poles as K varies from 0 to infinity.
We will focus on the following special type of feedback system
+
+ +
Have the same root locus

A Simple Example
+
Closed loop poles for different K:
If
If
If
Two open loop poles: 0, -4
No open loop zeros

Root Locus
Changing K, the two closed loop poles are represented by two moving points
(Breakaway point)

Another Example
+ Two open loop poles: j and -j
One open loop zero: 0
Closed loop poles for different K:

Root Locus
There are two branches that start from the open loop poles at K=0.
As K increases to 1, one branch converges to the open loop zero and the other diverges.
(Breakin point)

In General• The root locus of a characteristic equation
consists of n branches – Start from the n open loop poles p1,…, pn at K=0
– m of them converge to the m open loop zeros z1,…,zm
– The other n-m diverge to 1 along certain asymptotic lines
• Points of interest– Point where root locus crosses the imaginary axis– Breakin/Breakaway points– Diverging asymptotic lines
• Can we find the root locus without solving the characteristic equation?

Characterizing Points on the Root Locus
+
How to determine if a point s on the complex plane belongs to the root locus?

Angle Condition
A point s on the complex plane belongs to the root locus if and only if
s is on the root locus if and only if
Example:

Review on Complex Analysis
Given a complex number z=a+bj
Its modulus (or norm) is
Its (phase) angle is
Product of two complex numbers
Quotient of two complex numbers

Previous Examples

Root Locus on the Real AxisA point on the real axis belongs to the root locus if and only there are odd number of open loop zeros/poles to its right
Why? Use the angle condition
Example: characteristic equation

Asymptotic Behaviors of Root Locus
Root locus of the feedback system consists of n branches
At K=0, the n branches start from the n open loop poles
Why?
+

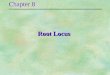
ExampleHow does the other n-m branches diverge to infinity?
Example:
-6 -5 -4 -3 -2 -1 0 1 2-4
-3
-2
-1
0
1
2
3
4 Matlab code:
The three branches diverge to infinity along three evenly distributed rays centered at -1, which is the center of the three open loop poles

Asymptotic Behaviors of Root Locus
with angles
Why?
is approximated by
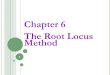
As K approaches 1, m branches converge to the m open loop zeros, and the other n-m branches diverge to infinity along n-m rays (asymptotes) centered at:

Examples of Asymptotes of Root Locus
-6 -5 -4 -3 -2 -1 0 1 2-4
-3
-2
-1
0
1
2
3
4Root Locus
Real Axis
Imag
inar
y A
xis