Embed Size (px)
Citation preview

Chapter 6
The Root Locus Method
1

2
Chapter Objective. Definition of root locus.
Sketch a root locus.
Refine the sketch of root locus.
Use root locus to find poles of a closed-loop system.
Use root locus to describe transient response and stability of
when system parameter, K is varied.
Use root locus to design a parameter value to meet transient
response specification.

3
Root Locus.1. Introduction to Root Locus.
2. Root Locus Concept.
3. Defining Root Locus.
4. Properties of Root Locus.
5. Review Root Locus.
6. Sketching Root Locus.
7. Refining the Sketch.
i. Breakaway and Break-in Points.
ii. jw Axis Crossing.

4
1. Introduction to Root Locus. Root locus, is a graphical representation of the close loop
poles as the system parameter is varied, is a powerful method
of analysis and design for stability and transient response (Evan, 1948;1950),
Able to provide solution for system of order higher than two.
The root locus can be used to describe qualitatively the
performance of a system as various parameters are change.
For example gain versus percentage overshoot, settling time
and peak time.
The root locus also provides a graphic representation of
system’s stability.
Ranges of Stability
Ranges of Instability
Conditions that cause a system to break into oscillation

5
2. Root Locus Concept. Close-loop feedback control system,
The system transient response and stability depends upon
the poles of T(s).
The root locus will be used to give us a clear picture of poles
of T(s) as K varies.
Figure 4.1: (A) A Close Loop System.
(b) Equivalent Transfer Function.

Root locus are used to analyze and design the effect of loop gain
upon the system’s transient response and stability.
By taking the CameraMan system as an example, the video camera
system are designed to automatically follow the subject.
The tracking system consists of a dual sensor and a transmitter,
where one component is mounted on the camera, and the other worn
by the subject.
An imbalance between the outputs of the two sensors receiving
energy from the transmitted causes the system to rotate the camera
to balance out the difference and seek the source of energy.
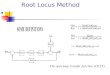
3. Defining Root Locus.

DEFINING ROOT LOCUS
(a) CameraMan® Presenter
Camera System
automatically follows a
subject who wears infrared
sensors on their front and
back tracking commands
and audio are relayed to
CameraMan via a radio
frequency link from a unit
worn by the subject.
(b) Block diagram
(c) Closed-loop transfer
function

DEFINING ROOT LOCUS
Pole location as a function of gain for the CameraMan
system.
The close loop poles (clp) of the system change location as the
gain, K, is varied.

9
~To analyze and design the effect of loop gain upon the system
transient response and stability.It is observed:
At K = 0, poles exists at -10 and 0.
As K increases, both poles move towards each
other and meet at -5.
The poles break away into the complex plane
as K increases further.
One pole moves upward while the other
downwards.
The individual closed-loop poles plotted are removed and replaced
with solid lines.
Thus, root locus is a representation of the paths of the closed-loop
poles as the gain is varied.

10
4. Properties of Root Locus. We can made a rapid sketch of the root locus of a higher-order
systems without having to factor the denominator of the close
loop transfer function.
Root Locus.
A pole s, exists when the
characteristic polynomial becomes zero.
Condition.
)()(1
)()(
sHsKG
sKGsT
0)()(1 sHsKG
1)()( sHsKG
180)12()()( ksHsKG
)()(
1
sHsGK
Odd multiples of 180
1801
1)()(
k
sHsKG

11
Example 1: Properties of Root Locus.
Solution: Close loop transfer function,
)2)(1(
)4)(3()()(
ss
ssKsHsKG
Test point 1: s = -2+j3
Given open loop transfer function as follows, determine whether
the test point is located on the root locus.
55.7043.1089057.7131.56
4321 Not an odd multiple of 180, the
test point is not a point on the root locus.
)122()73()1(
)4)(3()(
2 KsKsK
ssKsT

12
Repeat the calculation for the point , the angle do add
up to 1800.
The is the point in the root locus for some value of
gain
Calculate the gain,
Given poles and zeros of the open-loop transfer function, KG(s)H(s), a point in the s-plane is on the root locus for some
value of K, if
Cont’d…Example
)2/2(2 j
)2/2(2 j
18074.1449026.3547.194321
180)12( kanglespoleangleszero

13
The is the point on the root locus for the gain of
0.33.
Cont’d…Example
33.0)22.1)(12.2(
)22.1(2
2
21
21 ZZ
PPK
)2/2(2 j

14
5. Review Root Locus. Review close-loop system.
The closed-loop poles characteristic equation.
0)()()()( sNsKNsDsD HGHG
)()()()(
)()()(
)()(1
)()(
)(
)()(
)(
)()(
sNsKNsDsD
sDsKNsT
sHsG
sGsT
sD
sNsH
sD
sNsG
HGHG
HG
H
H
G
G
Figure 4.2: (a) A Close Loop System.
(b) Equivalent Transfer Function.

15
Review complex numbers.
Cont’d…
w
w
w
1
22
tan
M
MMe
js
j
w
ww
jasF
ajsF
assF
js
)()(
)()(
)(
w
w
w
jsas
jsasM
js
to connecting line
tohorizontal from angle
to from distance

16
Review complex numbers.
Magnitude.
Angle.
Cont’d…
w js
)())((
)())((
)(
)()(
21
21
n
m
pspsps
zszszs
sD
sNsF
n
j
j
m
i
i
ps
zs
sF
1
1
)(
)(
)(
lengthspole
lengthszero
ps
zs
Mn
j
j
m
i
i
1
1
)(
)(
anglespoleangleszero
pszsn
j
j
m
i
i
11
)()(

17
Example 2: Complex Root Locus Function via Vector.
Solution:
.
6.11643.632
4tan
204)2(
42)(
1)43()(
1)(
1
22
43
1
M
jsF
jsF
ssF
js
9.12613.533
4tan
5204)3(
43)(
)(
1
22
43
2
M
jsF
ssF
js
10496.751
4tan
174)1(
41)(
2)(
1
22
43
3
M
jsF
ssF
js
0-1-2
jwGiven )2(
)1()(
ss
ssF , find F(s) at s = -3+j4

18
Cont’d…Example
3.114217.0
)0.1049.1266.116(175
20M

19
Example 3: Root Locus; Complex Number.
Solution:
Given that F(s) = s+7, find F(s) at points = 5+j2.
43.6312
2tan
16.12212
212)(
7)25()(
25
7)(
1
22
25
M
jsF
jsF
js
ssF
js

20
6. Sketching the Root Locus. The following five rules allow us to sketch the root locus using
minimal calculation.
The sketch gives an insight into the behaviour of a control system.
1.) Number of Branches.
-The number of branches of the root locus equals the number of
closed-loop poles.
2.) Symmetry.
- The root locus is symmetrical about the real axis.

21
3.) Real Axis Segment.
- On the real axis, for K > 0, the “root locus exists on the left” of
an odd numbered real roots (poles/zeros).
Cont’d…
Figure 4.3: Poles and zeros of a
general open-loop system with
test points, Pj, on the real axis
Figure 4.4: Real- axis segments of
the root locus for the system of
Figure 8.6

22
4.) Starting and End Point.
The root locus begins at the finite and infinite poles at
G(s)H(s) and ends at the finite zeros of G(s)H(s).
- the root locus begin at the poles at -1 and -2 and ends at zeros at -
3 and -4.
- the poles start out at -1 and -2 and move through the real axis
space between the two poles.
Cont’d…
Figure 4.5: Complete root
locus for the system.

5.) BEHAVIOUR AT INFINITY
(ASYMPTOTES). Thus, the root locus approaches straight lines as asymptotes as
the locus approaches infinity.
The equation of the asymptotes are given by the real-axis
intercept, σa, and angle, θa, as follows:
The angle is given in radians with respect to the positive
extension of the real-axis.
zeros finite # poles finite #
zeros finitepoles finite
a
zeros finite # poles finite #
ra
Where,
r = ±1, ±3, ±5, ±7, ±9, …

24
7. Refining the Sketch. This section enable us to determine the;
(1.) Points on the real axis where the root locus enters or leaves
the complex plane.
(2.) Real axis breakaway and break in points.
(3.) The jw axis crossing.

i. BREAKAWAY AND BREAK-IN POINTS.
Numerous root loci
appears to break
away from the real
axis as the system
poles move from
the real axis to the
complex planes.
At other times the
loci appear to
return to the real
axis as a pair of
complex poles
becomes real.

26
The point where the locus leaves the real axis , -1 is called the
breakaway point.
The point where the locus returns to the real axis , -2 is called the
break-in point.
Breakaway point is between -1 and -2.
Break-in point is between +3 and +5.
Cont’d…
Root Locus Breakaway and Break-in points.

CONT’D… Two methods to find breakaway and break-in points.
i. Differential calculus:
For points along the real-axis segments, s = σ.
ii. Transition method:
Breakaway and break-in points satisfy the following relationship
where zi and pi are the negative of the zero and pole values, of G(s)H(s).
)()(
1
sHsGK
)()(
1
HGK
n
i
m
i pz 11
11

28
Example 4: Root Locus Breakaway and Break-in Points.Find the breakaway and break-in point for the root locus of Figure
using differential calculus.
Solution:
Open loop system, root locus.
For all points along root locus, KG(s)H(s) =-1, and along the real axis s = .
Differentiating K with respect to & set the derivative equal to zero.
. The breakaway and break-in points.
0
1)()(
sds
dK
sHsKG
)23(
)158(
)2)(1(
)5)(3()()(
2
2
ss
ssK
ss
ssKsHsKG
82.345.1 and
)158(
)23(
1)23(
)158(
2
2
2
2
K
K
0)158(
)612611(22
2
d
dK

29
Example 5: Root Locus Gain (K).A unity feedback system with an open-loop system as given below
Determine the maximum gain K before the system starts to oscillate.
Solution: The characteristic equation is,
Rearrange
Differentiate to obtain the maximum gain
Out of the two values, we
choose -0.93 as –5.74 is not
on the locus.
Use the magnitude condition
Using , maximum K before the starts to
Oscillate.
)8)(2()(
sss
KsGO
sssK
Ksss
sss
K
1610
01610
0)8)(2(
1
23
23
74.5,93.0)3(2
)16)(3(42020
016203
2
2,1
2
s
ssds
dK
04.7
893.0293.093.01
821
821
93.093.0
sssssK
sssK

30
The jw axis crossing is the point on the root locus that separates
the stable operation of the system from the unstable operation.
The value of w at the axis crossing yields the frequency of
oscillation.
The gain at the jw-axis crossing yields the maximum positive gain for system stability.
ii.The jw Axis Crossing.

31
Example 6: Root Locus jw Crossing.
Find the frequency and gain, K, for which the root locus crosses the imaginary axis. For what range of K is the system stable?.
Solution:The close-loop transfer
function for the system;
Routh Table,
The system is stable for
0 ≤ K <9.65.
9.65)Kfor crossings-jat (Frequency59.1
07.20235.8021)90(
65.74
65.9
072065
22
2
wjs
sKsK
K
K
KK
s4 1 14 3K
s3 7 8+K
s2 90-K 21K
s1
K
KK
90
720652
s0 21K 0 0
KsKsss
sKsT
3)8(147
)3()(
234
positive) be should es(Gain valu 65.74
65.9
K

32
Example 7: Root Locus with Asymptotes.Sketch the root locus for the system shown in figure below.
Solution:1.) Calculate the asymptotes.
2.) Calculate the angle of the line that intersect at -4/3.
As r increases, the angle would begun to repeat.
3
4
14
)3()421(
zeros#poles#
zerospoles
zp
ii
ann
zp
5300
3180
160
6014
180
zeros finite # poles finite #
180
rfor
rfor
rfor
rrr
a
a

33
Example 8: Root Locus with Asymptotes.
Find the exact point and gain where the locus crosses the jw-axis
Solution:1.) Routh table.
2.) Find the breakaway point.
S2 K+1 8+20K
S1 6-4K 0
S0 8+20K 0
6 - 4K = 0
K = 1.5
(K+1)s2 + (8+20K) = 0
s = j3.9
204
)86(2
2
ss
ssK
)208()46()1(
)204()(
2
2
KsKsK
ssKsT
dK/ds = 0, So the breakaway point: -2.88