Embed Size (px)
Citation preview

Chapter 8
Root LocusRoot Locus

Root Locus
is a graphical presentation of the closed-loop poles as a system parameter is varied. It is a powerful method of analysis and design for stability and transient response.

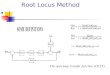
a. Closed-loop system;b. equivalent transfer function
KG(s)H(s) is the open-loop transfer function, poles are known and do not change with changes in gain. On the other hand, closed loop transfer function poles are not obvious, and their value change with changes in K. System transient response and stability are dependent upon the poles of T(s)The root locus will be used to give us a vivid picture of the poles of T(s) as K varies.
( ) ( )( )( )
1 ( ) ( ) ( ) ( ) ( ) ( )G H
G H G H
KN s D sKG sT s
KG s H s D s D s KN s N s
( )( )
( )
( )( )
( )
G
G
H
H
N sG s
D s
N sH s
D s

Vector representation of complex numbers:
1
1
( )zero length
pole lenghts( )
m
iin
jj
s zs
Ms p
1 1
zero angles - pole angles
= ( ) ( )m n
i ji j
s z s p
The function
Can be evaluated at any point s, finding the magnitude M as
And the angle as
1
1
( )numerator's complex factors length
( )denominator's complex factors
( )
m
iin
jj
s zF s
s p
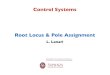
a. s = + j; b. (s + a);c. alternate representation of (s + a); d. (s + 7)|s5 + j2

Evaluation of a complex function via vectors
Problem Given F(s) = (s+1)/s(s+2), find F(s) at the point s = -3+j4Solution Shown in the figure each vector terminating on the selected point s = -3+j4The vector originating at the zero at -1 is The vector originating at the pole at 0 is The vector originating at the pole at -2 is Substituting in the equations in previous slide We get
20 116.6
5 126.9
17 104.0
20116.6 126.9 104.0 0.217 114.3
5 17M

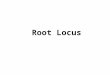
a. CameraMan®Presenter Camera System automatically follows a subject who wears infrared sensors on their front and back (the front sensor is also a microphone); trackingcommands and audio are relayed to CameraMan via a radio frequency link from a unit worn by the subject. b. block diagram.c. closed-loop transfer function.

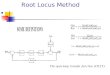
Table 8.1 Pole location as a function of gain for the system of Figure in previous slide
For UD since the real part does not change then settling time remains the same.

a. Pole plot from Table 8.1;b. root locus
The representation of the paths of the closed-loop poles as the gain is varied is called root locus.

Properties of the Root Locus
The closed-loop transfer function for the system is T(s) = KG(s)/1+KG(s)H(s). A pole exists when the charac. Polynomial in the denominator becomes zero, or
The value of s is a closed loop pole if
For the shown system
If a point s is a closed loop system pole for some value of gain, K, then s must satisfy the previous equations
( ) ( ) 1 1 (2 1)180KG s H s k
( ) ( ) 1 and
( ) ( ) (2 1)180
KG s H s
KG s H s k
2
( 3)( 4)( )
(1 ) (3 7 ) (2 12 )
K s sT s
K s K s K

Vector representation of G(s) for figure in previous slide at -2+ j 3
1 2 3 4 56.31 71.57 90 108.43 70.55
Since
Is not a multiple of 180 degrees, then -2+j3 is not a point on the root locus (not a closed loop pole)
However, The point
is a point on the root locus for some value of gain. We calculate the gain using the following equation
22 ( )
2j
pole lengths1 1
( ) ( ) zero lenghtsK
G s H s M

Sketching the Root Locus
1) Number of branches The # of branches of the root locus equals the # of closed-loop poles
2) Symmetry The root locus is symmetrical about the real axis.
3) Real-axis segments On the real axis, for K>0 the root locus exists to the left of an odd number of real-axis, finite open-loop poles and/or finite open-loop zeros.
4) Starting and ending points The root locus begins at the finite and infinite poles of G(s)H(s) and ends at the finite and infinite zeros of G(s)H(s).
5) Behavior at infinity The root locus approaches straight lines as asymptotes as the locus approaches infinity. Further the equation of the asymptotes is given by the real-axis intercept and angle as follows
finite poles -
#finite poles - # finite zerosa
finitezeros (2 1)
#finite poles - # finite zerosa
k

Real-axis segments of the root locus for the system in the Figure
The root locus exists between (1- , -2) )-3,-4)

Complete root locus for the system of Figure
The root locus begins at the finite and infinite poles (-1,-2) and ends at the finite and infinite zeros (-3,-4)

System for Example 8.2
Problem Sketch the root locus for the system shown
Solution let us begin by calculating the asymptotes
( 1 2 4) ( 3) 4
4 1 3a
(2 1)
#finite poles - # finite zeros
/ 3 for 0
for 1
5 / 3 for 2
a
k
K
K
K

Root locus and asymptotes for the system in previous slide

Real-Axis breakaway and Break-in Points via differentiation
The point where the locus leaves the real axis is called the breakaway point. The point where the locus returns to the real axis is called break-in point.
Problem Find the breakaway and break-in points for the root locus of Shown Figure.
Solution Using the open-loop poles and zeros, we have2
2
( 3)( 5) ( 8 15)( ) ( )
( 1)( 2) ( 3 2)
K s s K s sKG s H s
s s s s
s 2
2
( 8 15)1
( 3 2)
K
But for all points along the root locus, KG(s)H(s) = -1, and along the real axis Hence,
Solving for K, and then differentiating, we have
Solving for we find = -1.45 and 3.82
2
2
( 3 2)
( 8 15)K
2
2 2
(11 26 61)0
( 8 15)
dK
d

Real-Axis breakaway and break-in Points via the transition method
Breakaway and break-in points satisfy the relationship
where zi and pi are the negative of the zero and pole values,
respectively, of G(s)H(s)
Problem Find the breakaway and break-in points for the root locus of Shown Figure.
Solution Using the shown equation
Simplifying,
and solving for we find = -1.45 and 3.82. Same as previous method
1 1
1 1m n
i iz p
1 1 1 1
3 5 1 2
211 26 61 0

The Crossings j Axis
j Axis The crossing is a point on the root locus that separates the stable operation of the system from the unstable operation. The value of at the axis crossing yields the frequency of oscillation.
Problem For the system of Figure, find the frequency and gain, K, for which the root locus crosses the imaginary axis. For what range of K the system is stable?
Solution: The closed-loop transfer function for the system is
Obtain the Routh table for the system
4 3 2
( 3)( )
7 14 (8 ) 3
K sT s
s s s K s K

Routh table for previous system
Only the s1 row can yield a row of zeros, thus
-K2-65K+720 = 0 , and solving for K= 9.65
Forming the even polynomial using the s2 row with K = 9.65 we obtain 2 2(90 ) 21 80.35 202.7 0K s K s
1.59j
0 9.65K
And s is found to be . Thus the root locus crosses the imaginary axis at at again of 9.65. We conclude the system is stable for
1.59j

Angles of departure and arrival
Assume a point on the root locus close to a complex pole or zero, the Sum of all angles drawn from all finite poles and zeros to this point is an odd multiple of 180. The only unknown angle is the one drawn from the pole or zero that is close.

Angle of Departure from a complex pole Example
Problem Find the angle of departure from the complex poles and sketch the root locus
Using the poles and zeros of the open loop function G(s), we calculate the sum of angles drawn to a point close to the complex pole, -1+j1. Thus,
From which
1 1
1 2 3 4 1
1 190 tan tan 180
1 2
1 251.6 108.4

Root locus for previous system showing angle of departure

Finding and calibrating exact points on the root locus of Figure
We see that r = 0.747 is on the root locus, and the gain K at this point is found using the equation
pole lengths1 11.71
( ) ( ) zero lenghts
A C D EK
G s H s M B

a. System for Example 8.7b. root locus sketch
Problem Sketch the root locus for the system and find the following:•The point and gain where the locus crosses the imaginary axis.Crossing the jw axis at +/-j3.9 with a gain K=1.5•The breakaway points on the real axisBreakaway point at -2.88•The range of K for system to be stableStable for K between 0 and 1.5

Making second-order approximations
Figures b&d yield much better second-order approximation than figures a&c

System for Example 8.8
Problem Design the value of K to yield 1.52% OS.Estimate Ts,Tp and ss error.Solution 1.52% corresponds to 0.8 damping ratio.
** Breakaway points are found at -0.62 with K=2.51 and at -4.4 with k=28.89** Break-in point is found at -2.8 with k = 27.91

Characteristics of the system of Example 8.8

Second- and third-order responses for Example 8.8:
a. Case 2;b. Case 3
The partial fraction expansion of the closed-loop response of Case 3 is.
3
2
2 2
39.64( 1.5)( )
( 1.8)( 4.6 3.45)( 4.6 3.45)
39.64( 1.5)
( 1.8)( 9.2 33.06)
1 0.3 1.3( 4.6) 1.6(3.45)
( 1.8) ( 4.6) 3.45
sC s
s s s j s j
s
s s s s
s
s s s s

System requiring a root locus calibrated with p1 as a parameter
How can we obtain a root locus for variations of the value of p1?
Closed loop transfer function is formed as
Isolating p1
Converting the denominator to the form [1+p1G(s)H(s)]
this means we have a system with
21 1
( ) 10( )
1 ( ) ( ) ( 2) 2 10
KG sT s
KG s H s s p s p
21
10( )
2 10 ( 2)T s
s s p s
2
12
10
2 10( )( 2)
12 10
s sT sp s
s s
12
( 2)( ) ( )
2 10
p sKG s H s
s s

Root locus for the system of Figure, with p1 as a parameter
The root locus for the system described by the equation
is shown in the figure
12
( 2)( ) ( )
2 10
p sKG s H s
s s

Positive-feedback system
The transfer function of the positive feedback system is
Obviously, a pole, s, exists when
Therefore, the root locus for positive feedback systems consists of all points on the s-plane where the angle of KG(s)H(s) = 360
Now for sketching the root locus, few rules used for –ive feedback systems are not changed, while others changed as follows:
( )( )
1 ( ) ( )
KG sT s
KG s H s
( ) ( ) 1 1 360KG s H s k

1) Number of branches (no change)
2) Symmetry (no change)
3) starting and ending points (no change)
4) Real-axis segments On the real axis, the root locus exists to the left of an even number of real-axis, finite open-loop poles and/or finite open-loop zeros.
5) Behavior at infinity The root locus approaches straight lines as asymptotes as the locus approaches infinity. Further the equations of the asymptotes is given by the real-axis intercept and angle as follows
Positive-feedback system
2
#finite poles - # finite zerosa
k finite poles - finite zeros
#finite poles - # finite zerosa

Equivalent positive-feedback system for Example 8.9
Problem Sketch the root locus as a function of negative gain, k, for the shown system
Solution The equivalent positive feedback system is shown in the figure
The root locus is sketched in next slide

Equivalent positive-feedback system for Example 8.9
( 1 2 4) ( 3) 4
4 1 3a
2
#finite poles - # finite zeros
0 for 0
2 / 3 for 1
4 / 3 for 2
a
k
K
K
K