Embed Size (px)
Citation preview

Johann Schumann and Pramod Gupta
NASA Ames Research [email protected]
Bayesian Verification & Validation tools for adaptive systems

Motivation for NN V&V
Basis for Case Study I:•Neuro-adaptive control (IFCS Gen-II)•Network “learns” to compensate for deviations between plant and modelPrevious work:•SW V&V process for NN-based control•“Confidence tool” for dynamic monitoring
The major obstacle to the deployment of adaptive and autonomoussystems is being able to verify their correct operation – In Flight
Fixed gain controllers cannot deal with catastrophic changes or degradation in plantAdaptive systems (e.g., NN) can react to unexpected situations through learning
Relevance and potential:•IFCS NN controlled aircraft (F-15, C-17)•UAV control•Space exploration•Any safety-critical application of NN control

V&V Issues & our Approach
• Our approach combines mathematical analysis, intelligent validation, and dynamic monitoring and supports specific software V&V process,
• targets multiple aspects and phases of V&V of adaptive control systems, and
• uses a unique combination of research in– Neural Networks– Control Theory– Numerical Methods– Bayesian Statistics
• Verification: how to specify an unforseen event?• Validation: not possible to test all configurations
While traditional V&V methods will remain useful, these methods alone are insufficient to verify and certify adaptive control systems for use in safety-critical applications

Our Bayesian Approach
How good is the network performing at the moment?
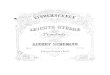
• Traditional: NN as a Black Box• Here: Look at probability distribution of the NN output• Variance (confidence measure) depends on:
–How well is the network trained?–How close are we to “well-known” areas
Large variance = bad estimate; no reliable result, just a guess
Small variance = good estimate
Our approach, based on a Bayesian approach, provides a measure of how well the neural network is performing at the moment

Milestone I: Envelope Tool
Basis: Adaptive NN-based controller
• Lyapunov error bound defines regions of eventual stability• Regions where confidence is small might cause instability• Informally: a safe envelope is a region where the confidence level is sufficiently high• Bayesian approach combined with sensitivity analysis• Challenge: methods for efficient determination of safe envelope
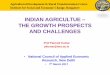
Can help answer questions like•How large is the current safe envelope?•How far is the operational point from the edge?
Current status: mathematical background formulated, prototypical Matlab/Simulink implementation designed, first simulation experiments

Confidence Envelope
Confidence Surface
Safety Envelope:area of good confidence
airspeed
The Envelope tool uses a Bayesian Approach to calculate the current safety envelope
1/co
nfid
ence
good
bad
altitude

Conclusions & next steps
• Current work as scheduled toward deliverable (9/2004)• prototypical implementation in Matlab/Simulink• report on mathematical background and tool
• Getting Case Study I ready: IFCS Gen-II simulink model • Next steps in research:
• system identification (sysID): estimate confidence of parameters• other model representations (e.g., parameter tables with polynomial interpretation)
• Preparation of Case Study II and III