Embed Size (px)
Citation preview
1
Jahangirabad Institute of Technology MOHAMMED WARIS SENAN
Assistant Professor
Semester 4th
, 2016
MASTER SCHEDULE: ELECTRICAL MACHINES & CONTROL SYSTEM (NEE – 409)
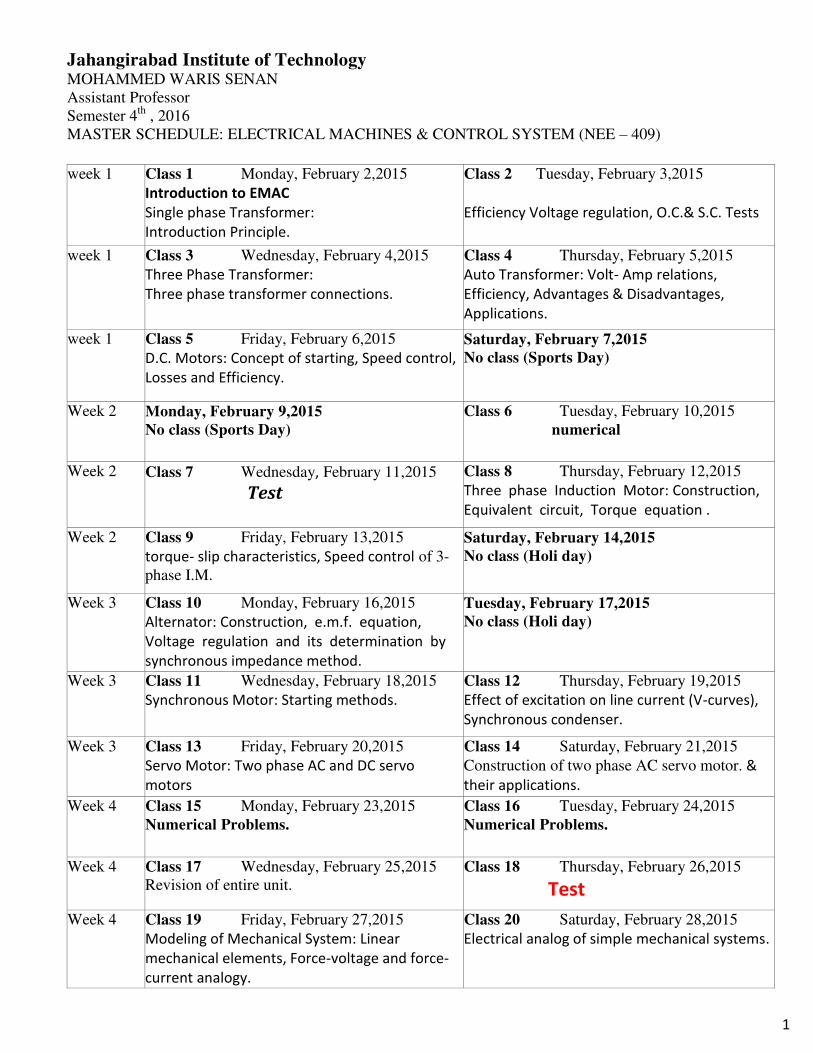
week 1 Class 1 Monday, February 2,2015
Introduction to EMAC
Single phase Transformer:
Introduction Principle.
Class 2 Tuesday, February 3,2015
Efficiency Voltage regulation, O.C.& S.C. Tests
week 1 Class 3 Wednesday, February 4,2015
Three Phase Transformer:
Three phase transformer connections.
Class 4 Thursday, February 5,2015
Auto Transformer: Volt- Amp relations,
Efficiency, Advantages & Disadvantages,
Applications.
week 1 Class 5 Friday, February 6,2015
D.C. Motors: Concept of starting, Speed control,
Losses and Efficiency.
Saturday, February 7,2015
No class (Sports Day)
Week 2 Monday, February 9,2015
No class (Sports Day)
Class 6 Tuesday, February 10,2015
numerical
Week 2 Class 7 Wednesday, February 11,2015
Test
Class 8 Thursday, February 12,2015
Three phase Induction Motor: Construction,
Equivalent circuit, Torque equation .
Week 2 Class 9 Friday, February 13,2015
torque- slip characteristics, Speed control of 3-
phase I.M.
Saturday, February 14,2015
No class (Holi day)
Week 3 Class 10 Monday, February 16,2015
Alternator: Construction, e.m.f. equation,
Voltage regulation and its determination by
synchronous impedance method.
Tuesday, February 17,2015
No class (Holi day)
Week 3 Class 11 Wednesday, February 18,2015
Synchronous Motor: Starting methods.
Class 12 Thursday, February 19,2015
Effect of excitation on line current (V-curves),
Synchronous condenser.
Week 3 Class 13 Friday, February 20,2015
Servo Motor: Two phase AC and DC servo
motors
Class 14 Saturday, February 21,2015
Construction of two phase AC servo motor. &
their applications.
Week 4 Class 15 Monday, February 23,2015
Numerical Problems.
Class 16 Tuesday, February 24,2015
Numerical Problems.
Week 4 Class 17 Wednesday, February 25,2015
Revision of entire unit.
Class 18 Thursday, February 26,2015
Test
Week 4 Class 19 Friday, February 27,2015
Modeling of Mechanical System: Linear
mechanical elements, Force-voltage and force-
current analogy.
Class 20 Saturday, February 28,2015
Electrical analog of simple mechanical systems.
2
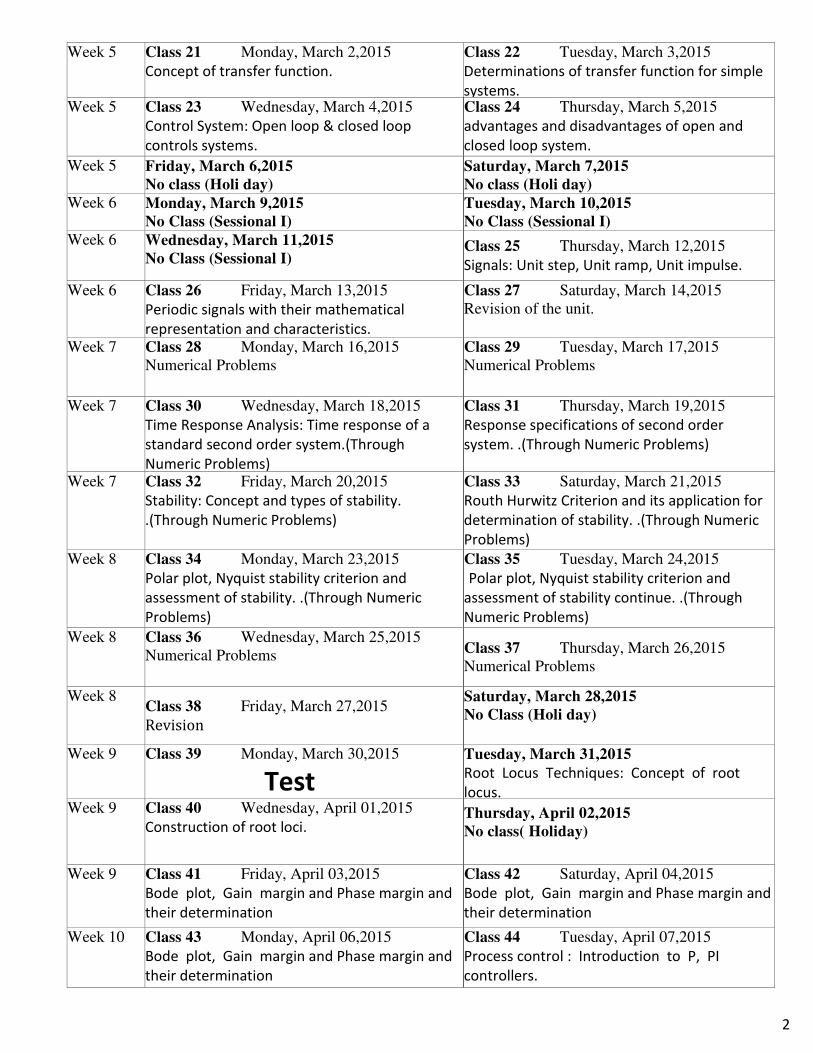
Week 5 Class 21 Monday, March 2,2015
Concept of transfer function.
Class 22 Tuesday, March 3,2015
Determinations of transfer function for simple
systems. Week 5 Class 23 Wednesday, March 4,2015
Control System: Open loop & closed loop
controls systems.
Class 24 Thursday, March 5,2015
advantages and disadvantages of open and
closed loop system.
Week 5 Friday, March 6,2015
No class (Holi day)
Saturday, March 7,2015
No class (Holi day)
Week 6 Monday, March 9,2015
No Class (Sessional I)
Tuesday, March 10,2015
No Class (Sessional I)
Week 6 Wednesday, March 11,2015
No Class (Sessional I)
Class 25 Thursday, March 12,2015
Signals: Unit step, Unit ramp, Unit impulse.
Week 6 Class 26 Friday, March 13,2015
Periodic signals with their mathematical
representation and characteristics.
Class 27 Saturday, March 14,2015
Revision of the unit.
Week 7 Class 28 Monday, March 16,2015
Numerical Problems
Class 29 Tuesday, March 17,2015
Numerical Problems
Week 7 Class 30 Wednesday, March 18,2015
Time Response Analysis: Time response of a
standard second order system.(Through
Numeric Problems)
Class 31 Thursday, March 19,2015
Response specifications of second order
system. .(Through Numeric Problems)
Week 7 Class 32 Friday, March 20,2015
Stability: Concept and types of stability.
.(Through Numeric Problems)
Class 33 Saturday, March 21,2015
Routh Hurwitz Criterion and its application for
determination of stability. .(Through Numeric
Problems)
Week 8 Class 34 Monday, March 23,2015
Polar plot, Nyquist stability criterion and
assessment of stability. .(Through Numeric
Problems)
Class 35 Tuesday, March 24,2015
Polar plot, Nyquist stability criterion and
assessment of stability continue. .(Through
Numeric Problems)
Week 8 Class 36 Wednesday, March 25,2015
Numerical Problems Class 37 Thursday, March 26,2015
Numerical Problems
Week 8 Class 38 Friday, March 27,2015
Revision
Saturday, March 28,2015
No Class (Holi day)
Week 9 Class 39 Monday, March 30,2015
Test
Tuesday, March 31,2015
Root Locus Techniques: Concept of root
locus. Week 9 Class 40 Wednesday, April 01,2015
Construction of root loci. Thursday, April 02,2015
No class( Holiday)
Week 9 Class 41 Friday, April 03,2015
Bode plot, Gain margin and Phase margin and
their determination
Class 42 Saturday, April 04,2015
Bode plot, Gain margin and Phase margin and
their determination
Week 10 Class 43 Monday, April 06,2015
Bode plot, Gain margin and Phase margin and
their determination
Class 44 Tuesday, April 07,2015
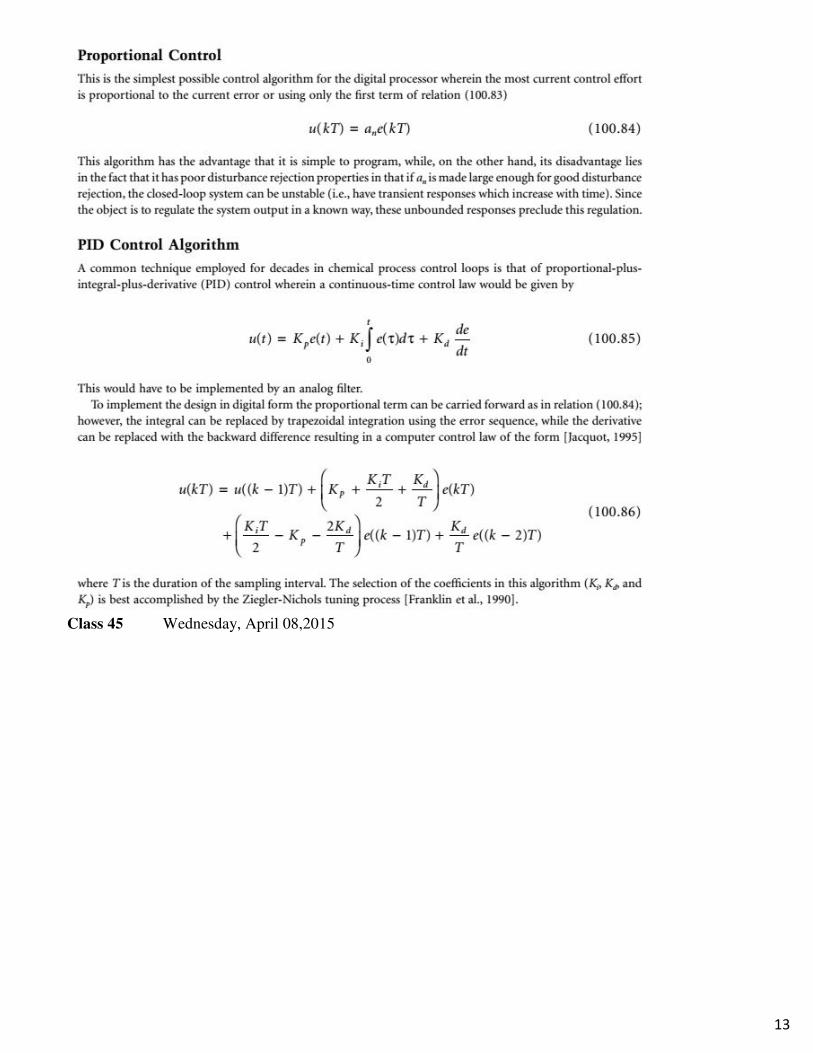
Process control : Introduction to P, PI
controllers.

3
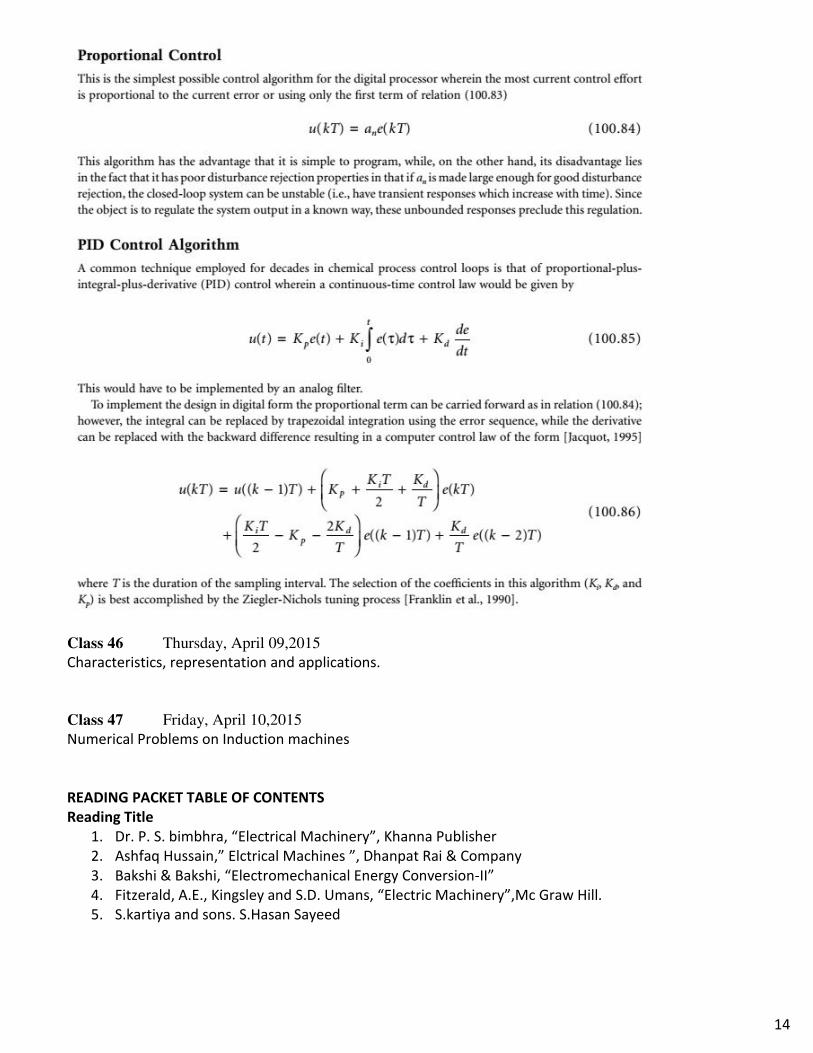
Week 10 Class 45 Wednesday, April 08,2015
PID controllers.
Class 46 Thursday, April 09,2015
Characteristics, representation and
applications.
Week 10 Class 47 Friday, April 10,2015
Numerical Problems on Induction machines
Class 48 Saturday, April 11,2015
Numerical Problems on Induction machines
Practice session-1. Practice session-2
Details are found in the following sections: General Information, Class Schedule, and Project Schedule.
GENERAL INFORMATION
Teaching Staff:
Mr. Mohammad Imran, JIT EE, [email protected]
Course Web Site: http://www.jit.edu.in
Class Meetings: JIT HoD Room EE
Goals :
This subject is combination of Electrical machine and control system.so main object of this
ourse will e to i ti ate stude t’s est k owledge a out oder day machines as well as the
controlling instruments with possible methods of control system. At the completion of the
course students should be able to describe the constructions/features/application/operation of
machines as well as all the methods of control.
Course Objectives:
A. At the time of Sessional Exam No. 1 (after approximately 24 (Fifty five minutes of lectures), the students
should be able describe the following:
1. Understand the concepts of transformers (single phase, three phase and auto.)
2. Construction and performance of DC motors.
3. Difference between Single phase and three phase Induction motor.
4. S C and O C test of transformer.
5. e.m.f. injection in rotor circuit of slip ring controls.
6. Equivalent circuit.
7. Speed control methods.
8. Construction and application of alternators.
9. Should know the operation modes of Single phase I.M.
4
10. Construction and application of synchronous motor.
B. By the time of Exam No. 2 (after approximately 25 lectures), the students should be able describe the
items listed below:
1. Synchronous condenser and servo motor.
2. Modeling of mechanical system.
3. Difference between open loop system and closed loop system.
4. Transfer function.
5. Routh Hurwitz criterion.
6. Nyquist plot, Root loci plot.
7. Applications of Bode plot.
8. Polar plot.
9. P, Pi and PID controllers.
Course Outcome:
1. Able to analyze the performance of the machines.
2. Able to design and calculate the losses, efficiency and parameters of the machines and transformers.
3. Able to verify the theoretical results with analytical solution.
4. Able to generate the concepts regarding basics of Electrical Engineering such as Active power, Reactive
Power, Power Factor will be enhanced.
5. Conversion.(Electrical to mechanical and vice versa)
Grading:
Based On Four Points:
1. Sessional Marks (2 hours paper/ 30 Marks)
2. Attendance (10 Marks)
3. Assignments (Total 5/5 Marks)
4. Class Test (Total 3 / 10 Marks)
Class Preparation and Participation:
Reading assignments are given in the Class Schedule for each class session. You are expected to come to class
prepared to discuss the readings and the suggested questions. Your individual class participation grade will be
based upon your in-class remarks during discussions.
5
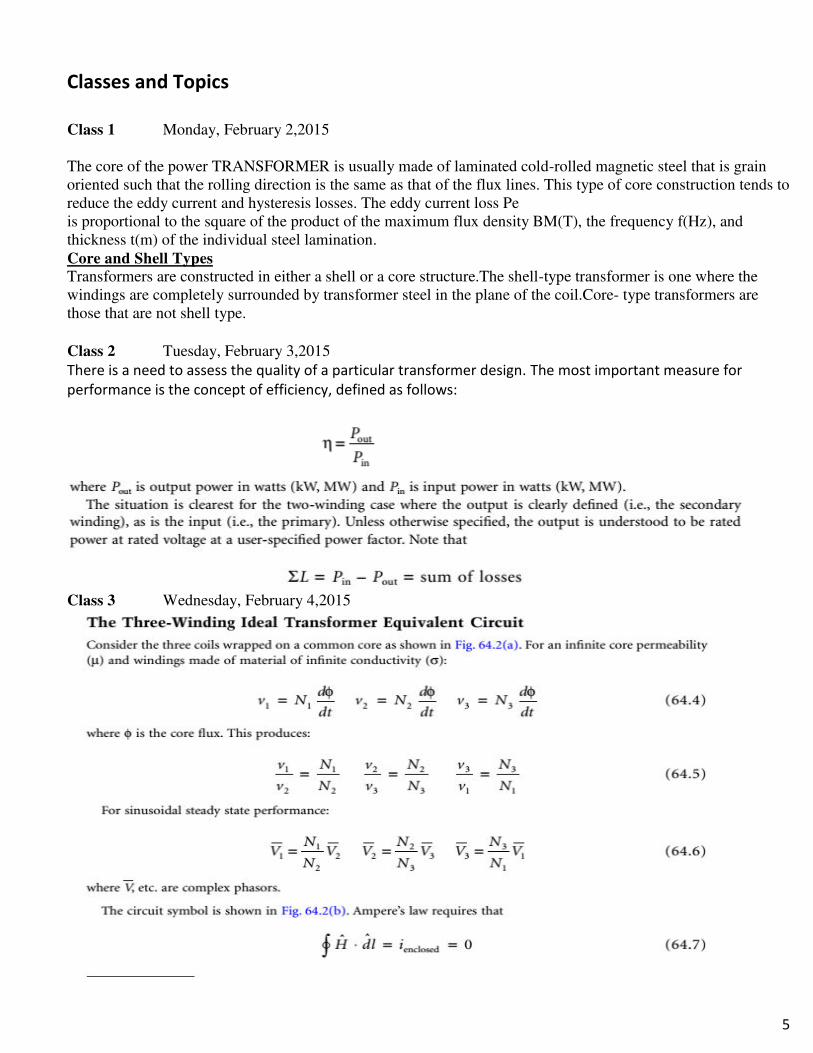
Classes and Topics
Class 1 Monday, February 2,2015
The core of the power TRANSFORMER is usually made of laminated cold-rolled magnetic steel that is grain
oriented such that the rolling direction is the same as that of the flux lines. This type of core construction tends to
reduce the eddy current and hysteresis losses. The eddy current loss Pe
is proportional to the square of the product of the maximum flux density BM(T), the frequency f(Hz), and
thickness t(m) of the individual steel lamination.
Core and Shell Types
Transformers are constructed in either a shell or a core structure.The shell-type transformer is one where the
windings are completely surrounded by transformer steel in the plane of the coil.Core- type transformers are
those that are not shell type.
Class 2 Tuesday, February 3,2015
There is a need to assess the quality of a particular transformer design. The most important measure for
performance is the concept of efficiency, defined as follows:
Class 3 Wednesday, February 4,2015
6
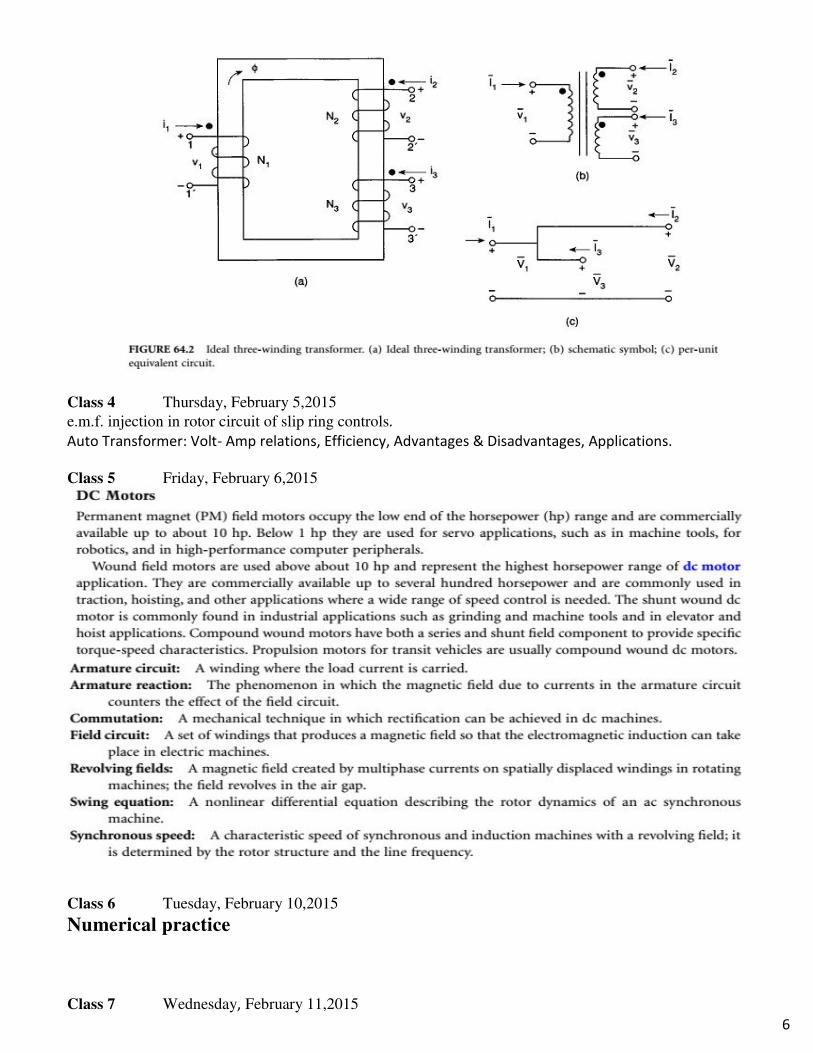
Class 4 Thursday, February 5,2015
e.m.f. injection in rotor circuit of slip ring controls.
Auto Transformer: Volt- Amp relations, Efficiency, Advantages & Disadvantages, Applications.
Class 5 Friday, February 6,2015
Class 6 Tuesday, February 10,2015
Numerical practice
Class 7 Wednesday, February 11,2015

7
Test
Class 8 Thursday, February 12,2015
Three Phase Induction Motor:
Poly phase ac motors are primarily three-phase and are by far the largest electric prime mover in all of
industry. They are offered in ranges from 5 up to 50,000 hp and account for a large percentage of the total
motor industry in the world. In number of units, the three-phase squirrel cage induction motor is the most
common. It is commercially available from 1 hp up to several thousand horsepower and can be used on
conventional ac power or in conjunction with adjustable speed ac drives. Fans, pumps, and material handling
are the most common applications.
When the torque-speed characteristics of a conventional ac induction motor need to be modified, the wound
rotor induction motor is used. These motors replace the squirrel cage rotor with a wound rotor and slip rings.
External resistors are used to adjust the torque-speed characteristics for speed control in such applications as
ac cranes and elevators.
Class 9 Friday, February 13,2015
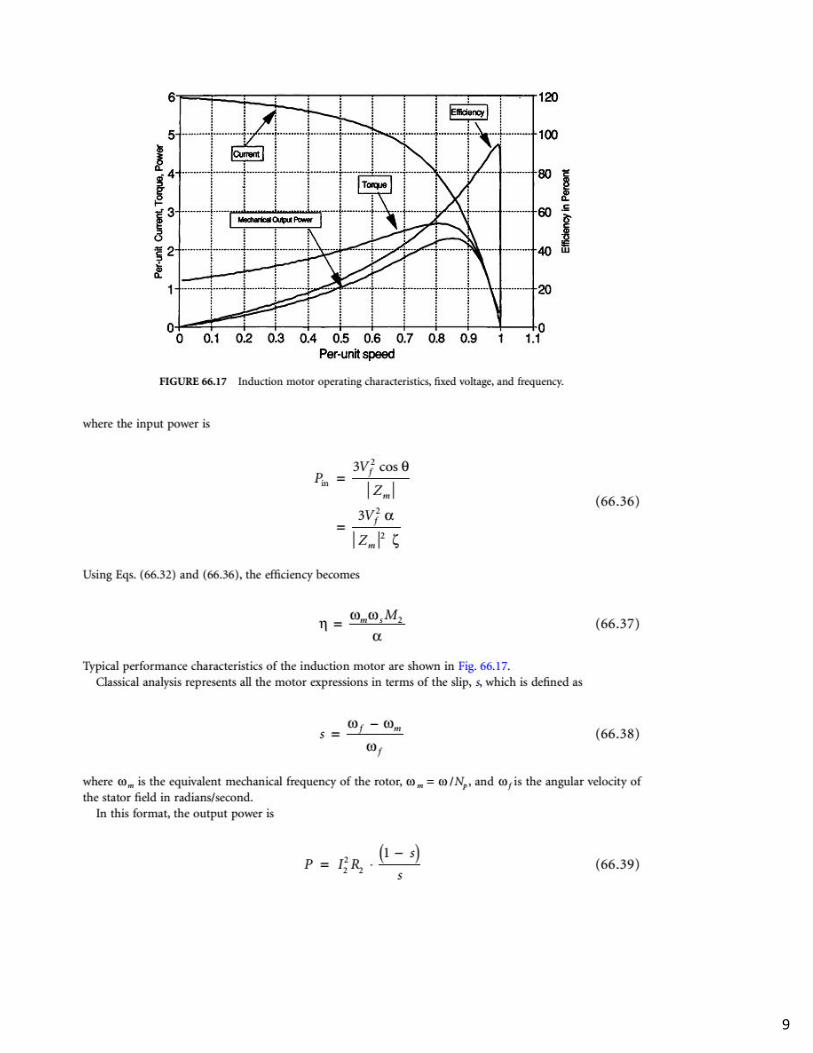
Induction Motor Analysis.
The characteristic algebraic equations for the steady-state power, torque and efficiency of the ac induction
motor are derived. All voltages and currents are in sinusoidal steady state. The derivation of the equations can be
simplified by defining the complex motor impedance as,

8
9

10
Class 10 Monday, February 16,2015
Alternator: Construction, e.m.f. equation, Voltage regulation and its determination by synchronous
impedance method.
AC Generators
Today, most electric power is produced by synchronous generators. Synchronous generators rotate at a
constant speed, called synchronous speed. This speed is dictated by the operating frequency of the system and
the machine structure. There are also ac generators that do not necessarily rotate at a fixed speed such as
those found in windmills (induction generators); these generators, however, account for only a very small
percentage of today’s ge erated power.
Class 11 Wednesday, February 18,2015
Synchronous motors
Single-phase synchronous motors are only used below about 1/10 of a horsepower. Typical applications are
timing and motion control, where low torque is required at fixed speeds.
Class 12 Thursday, February 19,2015
Synchronous condenser:
Power factor plays an important role in power engineering, In this session, we will discuss that how
synchronous condenser improves power factor of a circuit.
Class 13 Friday, February 20,2015
Servo Motor: Two phase AC and DC servo motors
In this session, we will discuss about types of servo motors.
Class 14 Saturday, February 21,2015
Construction of two phase AC servo motor. In this session, explanation about construction of the AC servo motor.
Class 15 Monday, February 23,2015
Numerical Problems.
Class 16 Tuesday, February 24,2015
Numerical Problems.
Class 17 Wednesday, February 25,2015
Revision of entire unit.
Class 18 Thursday, February 26,2015
Test.
Class 19 Friday, February 27,2015
Modeling of Mechanical System:
Linear mechanical elements, Force-voltage and force- current analogy.
Class 20 Saturday, February 28,2015
Electrical analog of simple mechanical systems.
Class 21 Monday, March 2,2015
11
Concept of transfer function.
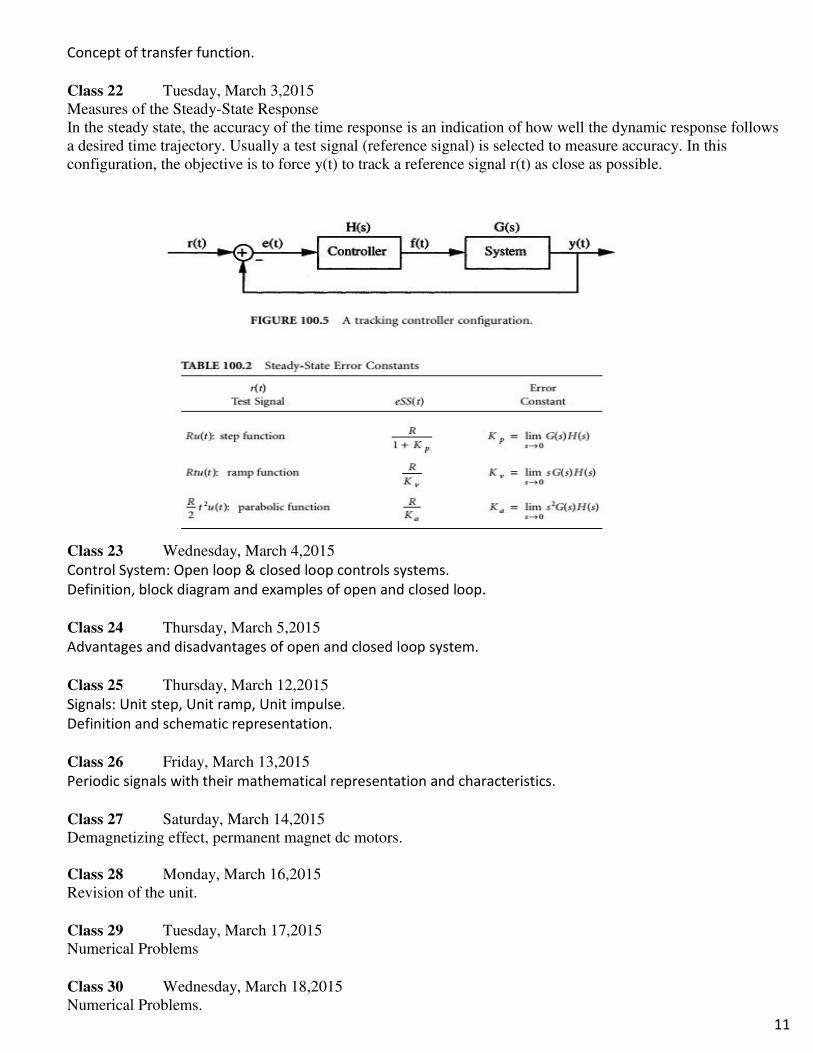
Class 22 Tuesday, March 3,2015
Measures of the Steady-State Response
In the steady state, the accuracy of the time response is an indication of how well the dynamic response follows
a desired time trajectory. Usually a test signal (reference signal) is selected to measure accuracy. In this
configuration, the objective is to force y(t) to track a reference signal r(t) as close as possible.
Class 23 Wednesday, March 4,2015
Control System: Open loop & closed loop controls systems.
Definition, block diagram and examples of open and closed loop.
Class 24 Thursday, March 5,2015
Advantages and disadvantages of open and closed loop system.
Class 25 Thursday, March 12,2015
Signals: Unit step, Unit ramp, Unit impulse.
Definition and schematic representation.
Class 26 Friday, March 13,2015
Periodic signals with their mathematical representation and characteristics.
Class 27 Saturday, March 14,2015
Demagnetizing effect, permanent magnet dc motors.
Class 28 Monday, March 16,2015
Revision of the unit.
Class 29 Tuesday, March 17,2015
Numerical Problems
Class 30 Wednesday, March 18,2015
Numerical Problems.
12
Class 31 Thursday, March 19,2015
Time Response Analysis: Time response of a standard second order system.(Through Numeric Problems)
Class 32 Friday, March 20,2015
Numeric Problems
Class 33 Saturday, March 21,2015
Numeric Problems
Class 34 Monday, March 23,2015
Numeric Problems
Class 35 Tuesday, March 24,2015
Numeric Problems
Class 36 Wednesday, March 25,2015
Numeric Problems
Class 37 Thursday, March 26,2015
Numeric Problems
Class 38 Friday, March 27,2015
Revision
Class 39 Monday, March 30,2015
test
Motors Class 40 Wednesday, April 01,2015
Construction of root loci. through numeric problem
Class 41 Friday, April 03,2015
Bode plot, Gain margin and Phase margin and their determination
(through numeric problem)
Class 42 Saturday, April 04,2015
Bode plot, Gain margin and Phase margin and their determination
(through numeric problem)
Class 43 Monday, April 06,2015
Bode plot, Gain margin and Phase margin and their determination
(through numeric problem)
Class 44 Tuesday, April 07,2015
13
Class 45 Wednesday, April 08,2015
14
Class 46 Thursday, April 09,2015
Characteristics, representation and applications.
Class 47 Friday, April 10,2015
Numerical Problems on Induction machines
READING PACKET TABLE OF CONTENTS
Reading Title
1. Dr. P. S. bimbhra, Electrical Machinery , Khanna Publisher
2. Ashfaq Hussain, Elctrical Machines , Dhanpat Rai & Company
3. Bakshi & Bakshi, Electromechanical Energy Conversion-II
4. Fitzerald, A.E., Kingsley and S.D. Umans, Electric Machinery ,Mc Graw Hill.
5. S.kartiya and sons. S.Hasan Sayeed