Embed Size (px)
Citation preview
Signals and Systems
6552111 Signals and Systems
Sopapun Suwansawang
1
Lecture #3
Elementary Signals and Systems
Week#3
Systems
6552111 Signals and Systems
Sopapun Suwansawang 2
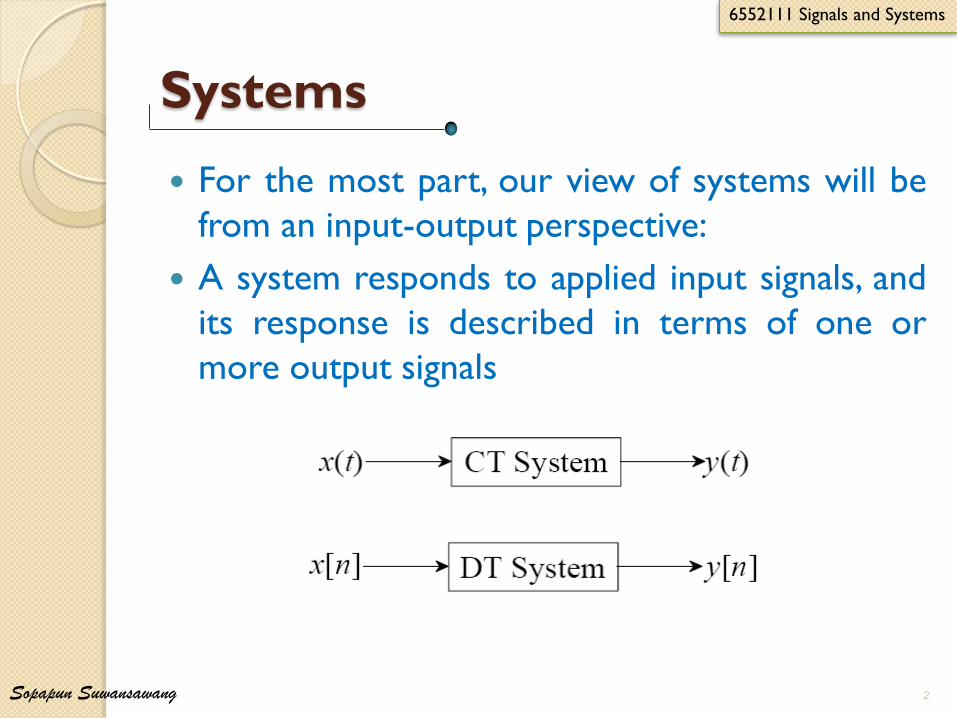
For the most part, our view of systems will be
from an input-output perspective:
A system responds to applied input signals, and
its response is described in terms of one or
more output signals
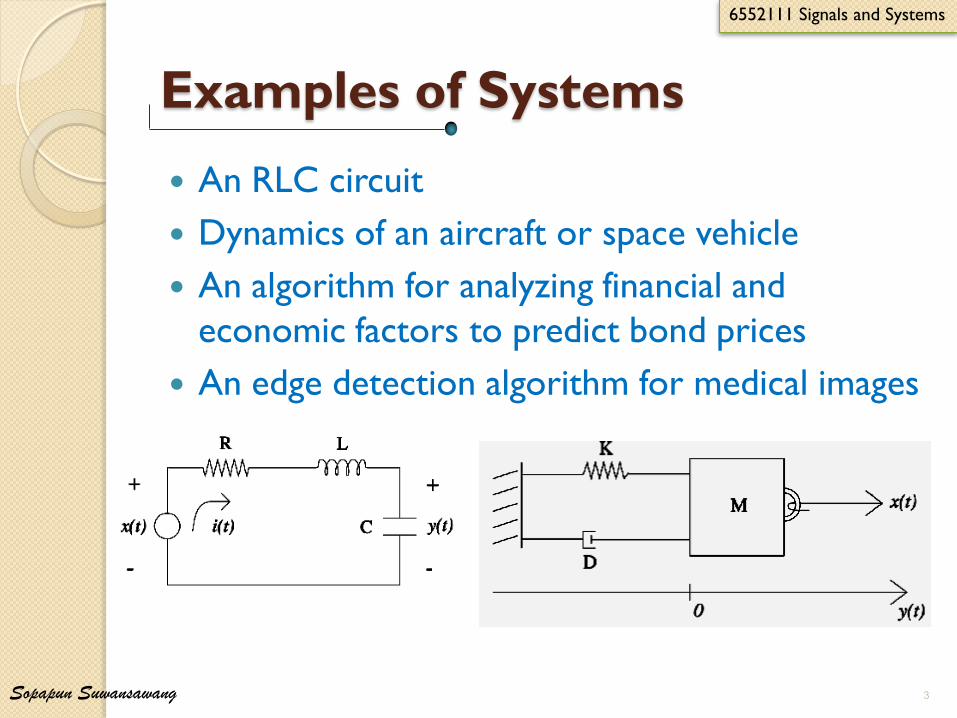
Examples of Systems
Sopapun Suwansawang 3
6552111 Signals and Systems
An RLC circuit
Dynamics of an aircraft or space vehicle
An algorithm for analyzing financial and
economic factors to predict bond prices
An edge detection algorithm for medical images
4
6552111 Signals and Systems
Sopapun Suwansawang
System Interconnections
An important concept is that of interconnecting
systems
-To build more complex systems by interconnecting
simpler subsystems
-To modify response of a system
5Sopapun Suwansawang
6552111 Signals and Systems
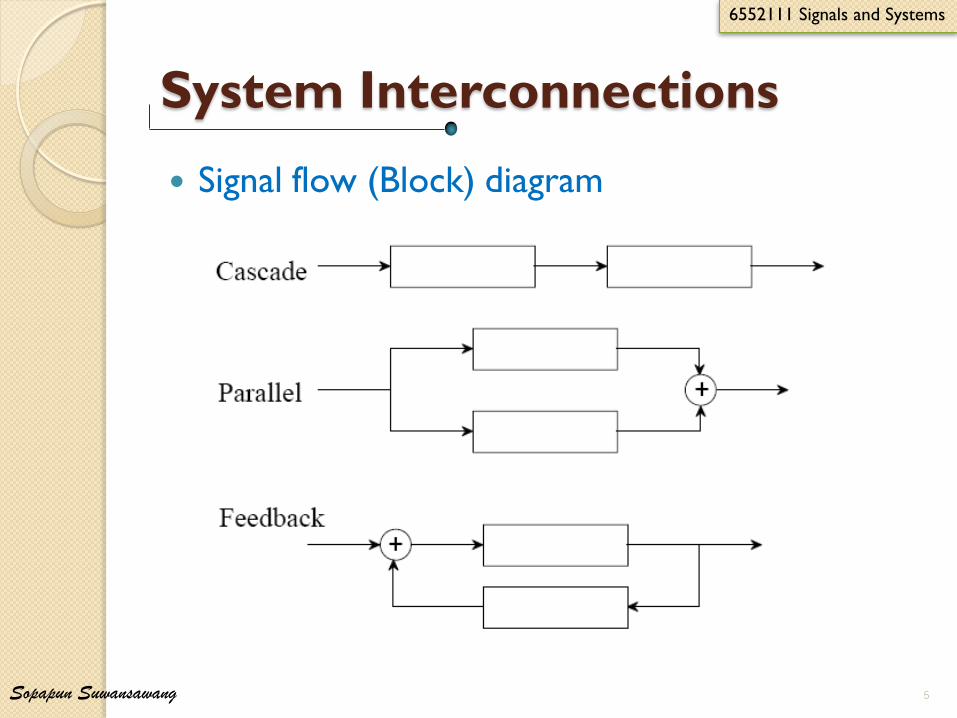
System Interconnections
Signal flow (Block) diagram
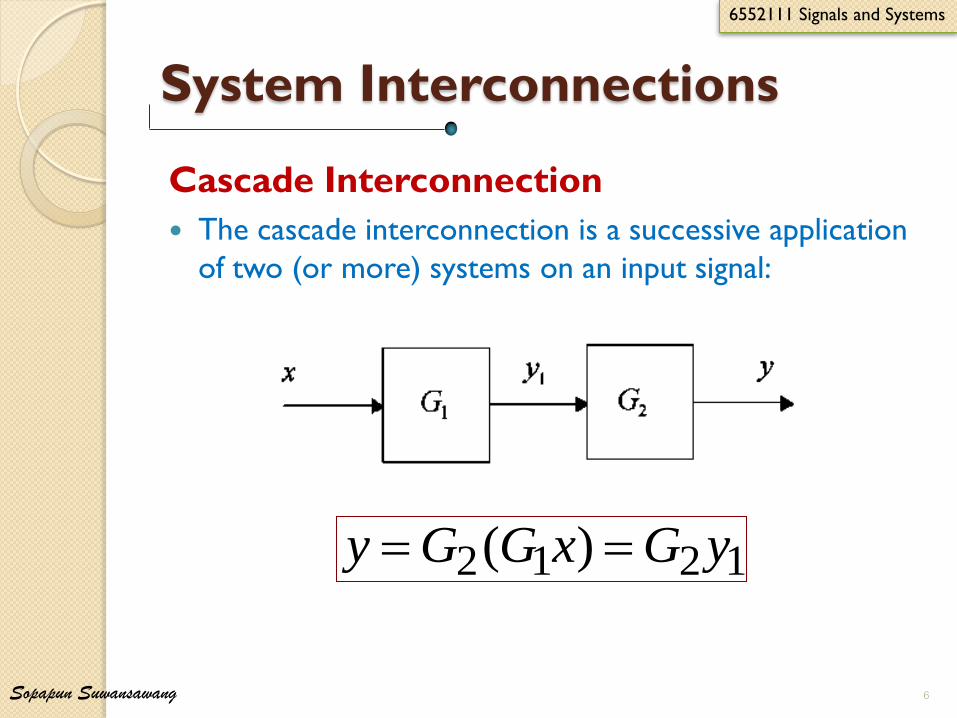
System Interconnections
Cascade Interconnection
The cascade interconnection is a successive application
of two (or more) systems on an input signal:
6Sopapun Suwansawang
6552111 Signals and Systems
1212 )( yGxGGy
7
System Interconnections
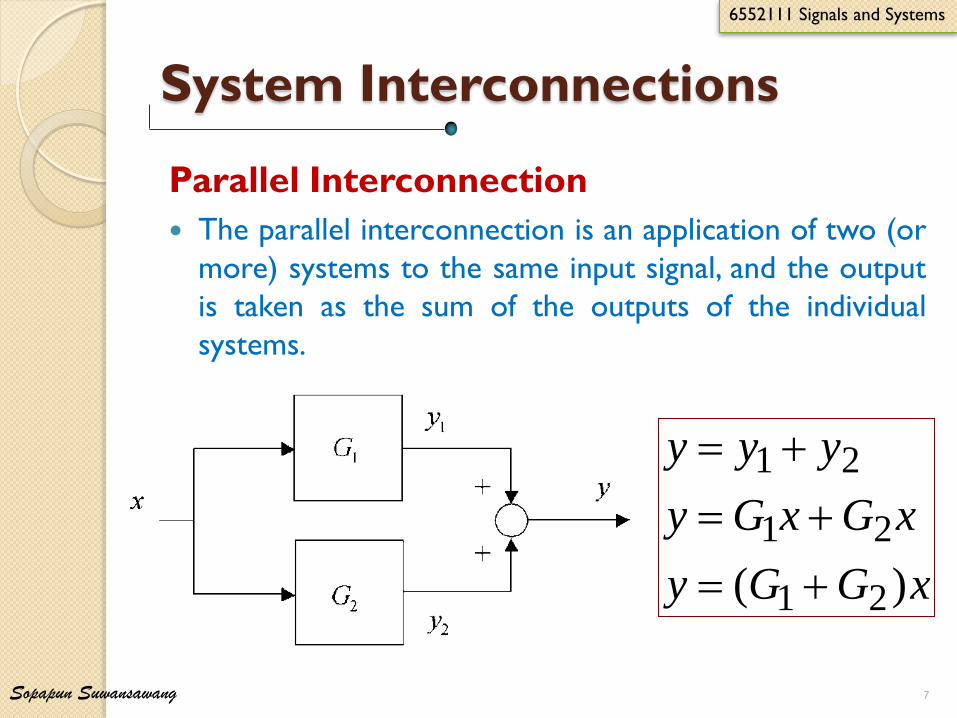
Parallel Interconnection
The parallel interconnection is an application of two (or
more) systems to the same input signal, and the output
is taken as the sum of the outputs of the individual
systems.
7Sopapun Suwansawang
6552111 Signals and Systems
xGGy
xGxGy
yyy
)( 21
21
21
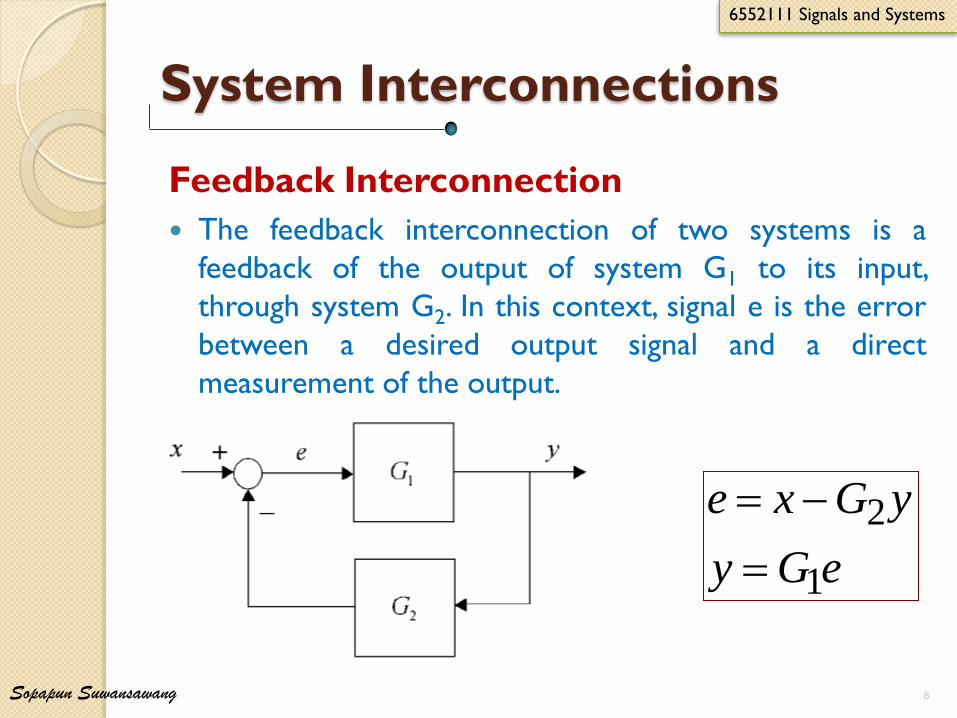
Feedback Interconnection
The feedback interconnection of two systems is a
feedback of the output of system G1 to its input,
through system G2. In this context, signal e is the error
between a desired output signal and a direct
measurement of the output.
8
System Interconnections
6552111 Signals and Systems
Sopapun Suwansawang
eGy
yGxe
1
2
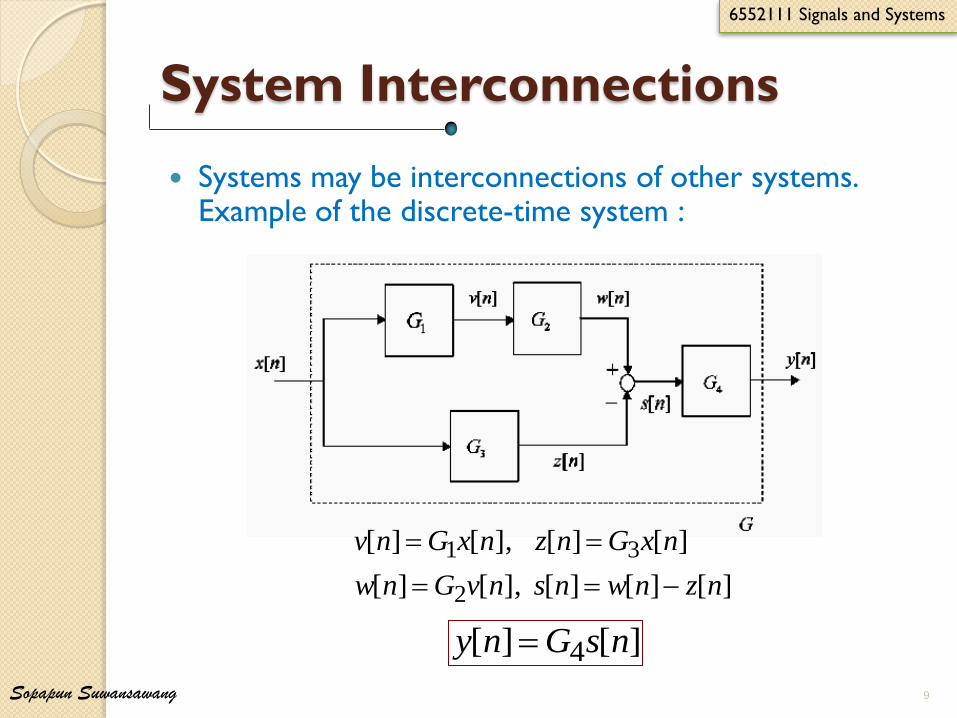
Systems may be interconnections of other systems. Example of the discrete-time system :
9
System Interconnections
6552111 Signals and Systems
Sopapun Suwansawang
][][][],[][
][][],[][
2
31
nznwnsnvGnw
nxGnznxGnv
][][ 4 nsGny
10Sopapun Suwansawang
6552111 Signals and Systems
System Properties
Causality - Causal & Noncausal
Linearity - Linear & Nonlinear
Time-invariance - Time-invariant & Time-varying
Memory - Memoryless & Memory
Stability - Stable & Unstable
Invertibility - Invertible & Noninvertible
11Sopapun Suwansawang
6552111 Signals and Systems
Causality
A system is causal if its output at time t or n depends
only on past or current values of the input.
Mathematically (in CT): A system x(t) →y(t) is causal if
when
and
then
Causal or Noncausal ?
12Sopapun Suwansawang
6552111 Signals and Systems
Causality
]1[2
1][.4
][][.3
)1()(.2
)1()(.1
31
2
nxny
nxny
txty
txty
n
13Sopapun Suwansawang
6552111 Signals and Systems
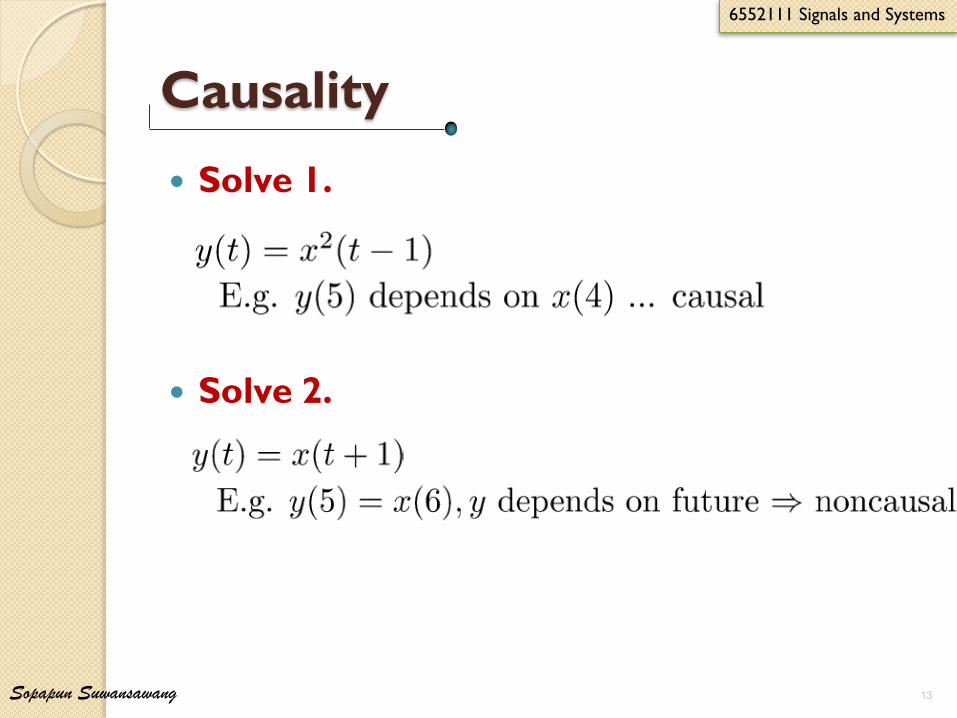
Solve 1.
Solve 2.
Causality
14Sopapun Suwansawang
6552111 Signals and Systems
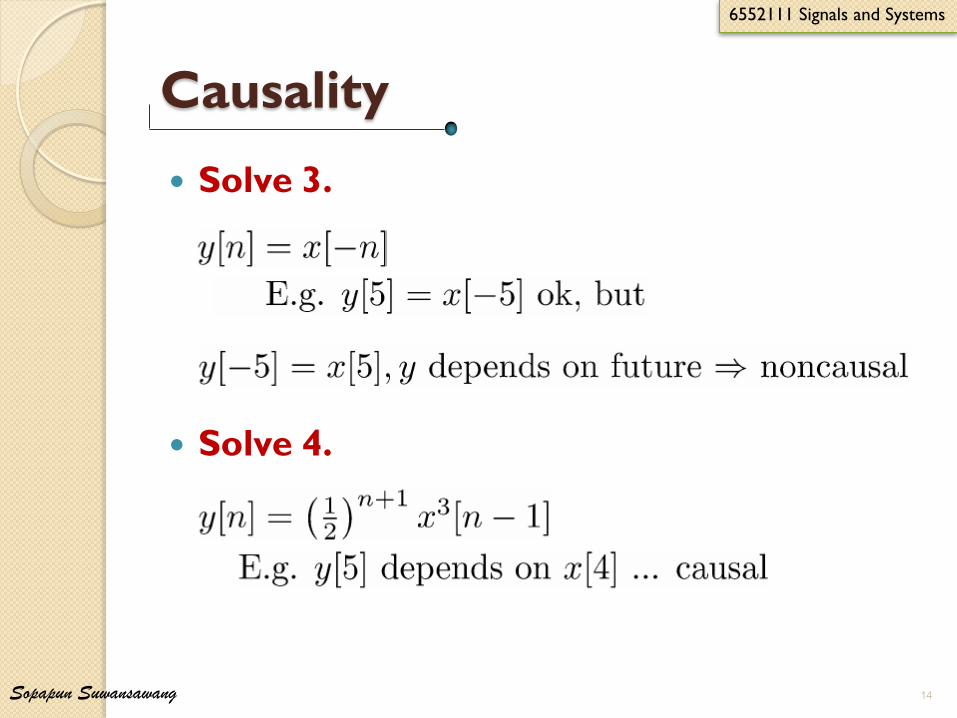
Solve 3.
Solve 4.
Causality

15Sopapun Suwansawang
6552111 Signals and Systems
Linearity
Linear systems
Additivity:
Given that Tx1= y1 and Tx2 = y2, then
for any signals x1 and x2.
Homogeneity (or Scaling):
for any signals x and any scalar .
yxT }{
2121 }{ yyxxT (1)
(2)
16
Equations (1) and ( 2) can be combined into a
single condition as
where 1 and 2 are arbitrary scalars. Equation(3)
is known as the superposition property.
Sopapun Suwansawang
6552111 Signals and Systems
Linearity
22112211 }{ yyxxT
Any system that does not satisfy Eq.(1) and/or Eq. (2)
is classified as a nonlinear system.
17Sopapun Suwansawang
6552111 Signals and Systems
Linearity
Summary•Superposition
•For linear systems, zero input → zero output
18
6552111 Signals and Systems
Linear or nonlinear?
Sopapun Suwansawang
Linearity
][
2
2
2
][.6
)()(.5
][][.4
)()(.3
][][.2
)()(.1
nxeny
txty
nxny
txty
nnxny
ttxty
19
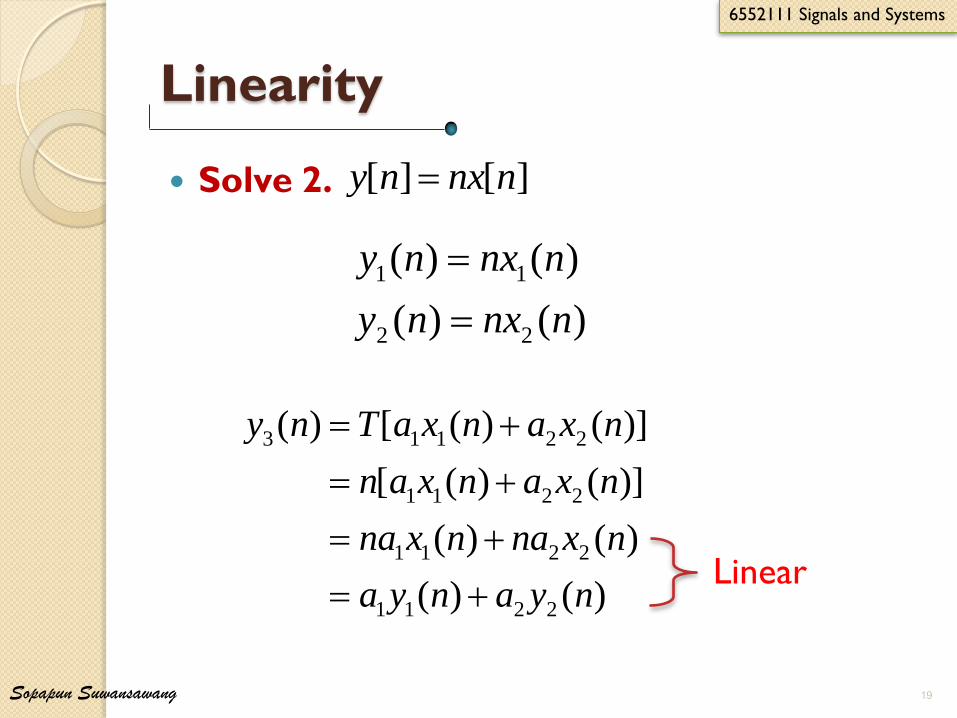
Solve 2.
1 1
2 2
( ) ( )
( ) ( )
y n nx n
y n nx n
3 1 1 2 2
1 1 2 2
1 1 2 2
1 1 2 2
( ) [ ( ) ( )]
[ ( ) ( )]
( ) ( )
( ) ( )
y n T a x n a x n
n a x n a x n
na x n na x n
a y n a y n
][][ nnxny
6552111 Signals and Systems
Sopapun Suwansawang
Linearity
Linear
20
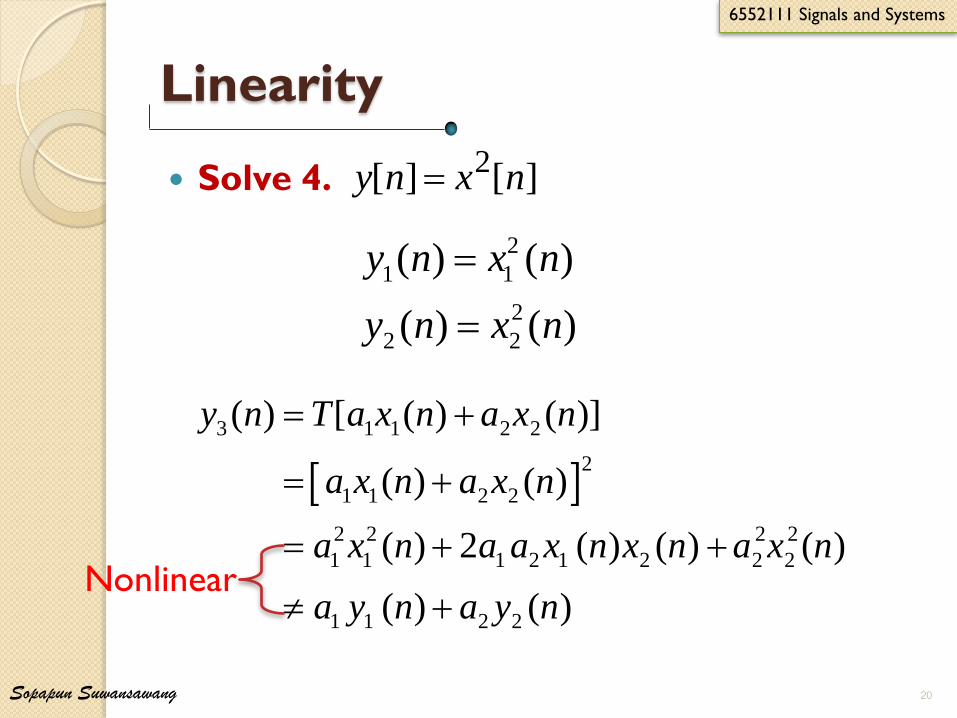
2
1 1
2
2 2
( ) ( )
( ) ( )
y n x n
y n x n
3 1 1 2 2
2
1 1 2 2
2 2 2 2
1 1 1 2 1 2 2 2
2 2 2
1 1 2 2 1 1 2 2
( ) [ ( ) ( )]
( ) ( )
( ) 2 ( ) ( ) ( )
( ) ( ) ( ) ( )
y n T a x n a x n
a x n a x n
a x n a a x n x n a x n
a y n a y n a x n a x n
Nonlinear
6552111 Signals and Systems
Sopapun Suwansawang
Linearity
Solve 4. ][][ 2 nxny
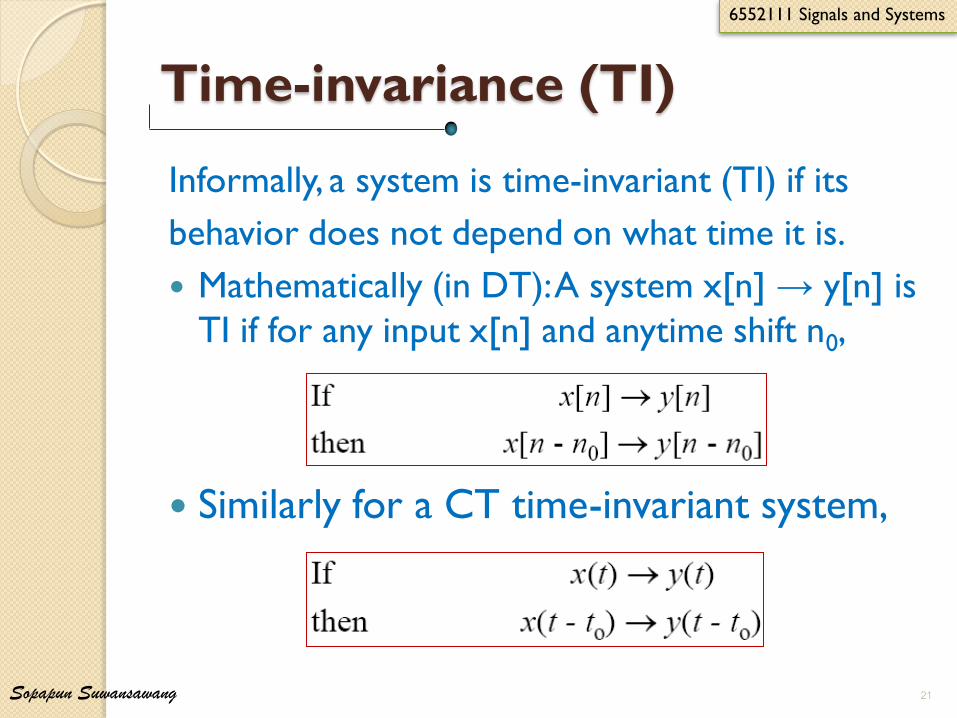
Informally, a system is time-invariant (TI) if its
behavior does not depend on what time it is.
Mathematically (in DT): A system x[n] → y[n] is
TI if for any input x[n] and anytime shift n0,
Similarly for a CT time-invariant system,
21
6552111 Signals and Systems
Sopapun Suwansawang
Time-invariance (TI)
22
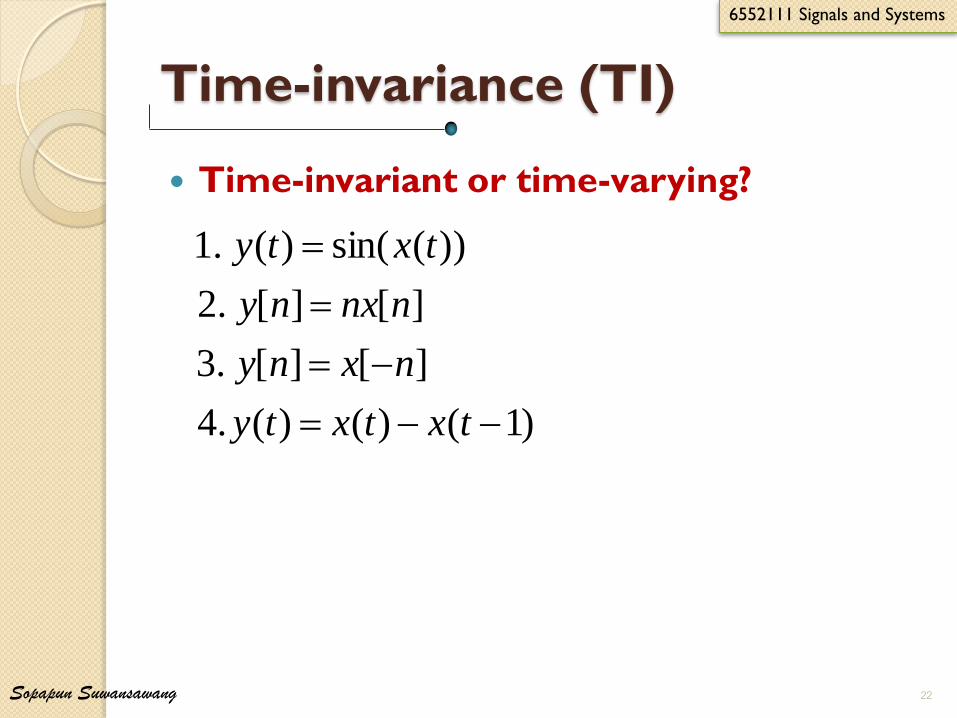
Time-invariant or time-varying?
6552111 Signals and Systems
Sopapun Suwansawang
Time-invariance (TI)
)1()()(.4
][][.3
][][.2
))(sin()(.1
txtxty
nxny
nnxny
txty
23
6552111 Signals and Systems
Sopapun Suwansawang
Time-invariance (TI)
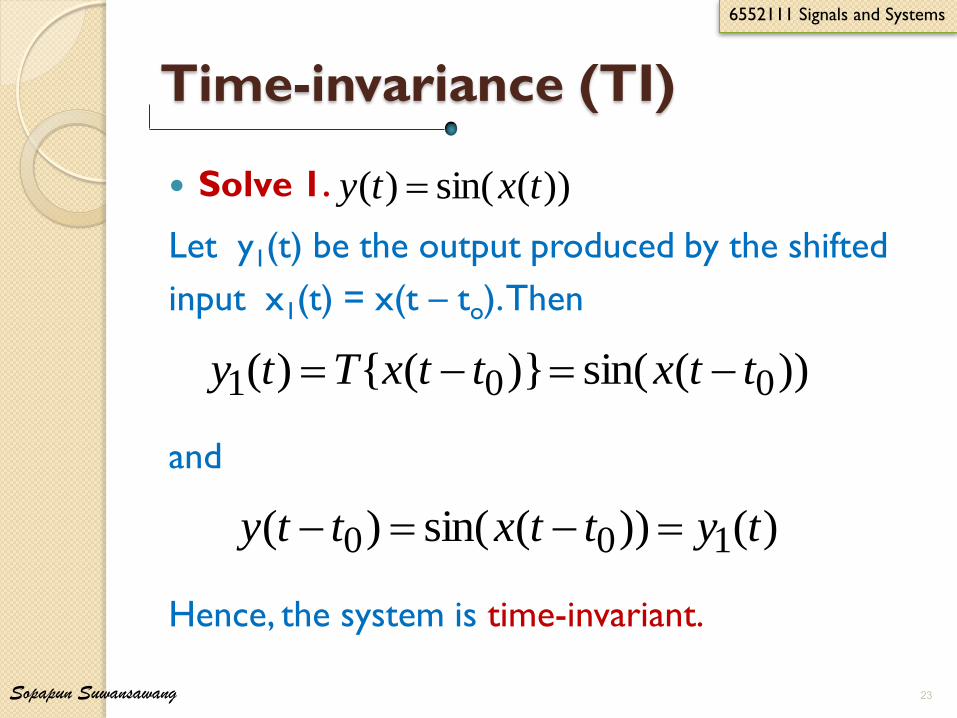
Solve 1.Let y1(t) be the output produced by the shifted
input x1(t) = x(t – to). Then
and
Hence, the system is time-invariant.
))(sin()}({)( 001 ttxttxTty
)())(sin()( 100 tyttxtty
))(sin()( txty
24
6552111 Signals and Systems
Sopapun Suwansawang
Time-invariance (TI)
Solve 2.Let y1[ n ] be the response to xl[ n ] = x[n - no].
Then
but
Hence, the system is time-varying.
][][ nnxny
][]}[{][ 001 nnnxnnxTny
][][)(][ 1000 nynnxnnnny
Linear Time-Invariant Systems
If the system is linear and also time-invariant,
then it is called a linear time-invariant (LTI)
system.
A basic fact: If we know the response of an LTI
system to some inputs, we actually know the
response to many inputs.
25
6552111 Signals and Systems
Sopapun Suwansawang
Memory
A system is memoryless if its output at time t
or n depends only on the input at that same
time.
Conversely, a system has memory if its output
at time t or n depends on input values at some
other times.
26
6552111 Signals and Systems
Sopapun Suwansawang
)(1
)()(,][][ 2
tx
txtynxny
]1[][]1[][ nxnxnxny
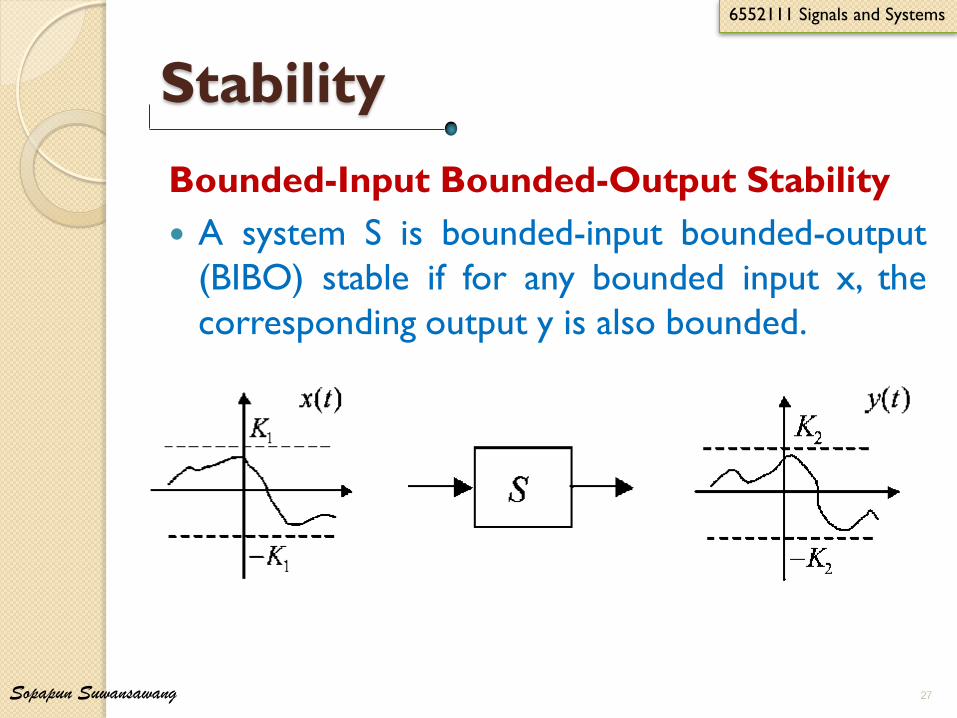
Stability
Bounded-Input Bounded-Output Stability
A system S is bounded-input bounded-output
(BIBO) stable if for any bounded input x, the
corresponding output y is also bounded.
27
6552111 Signals and Systems
Sopapun Suwansawang
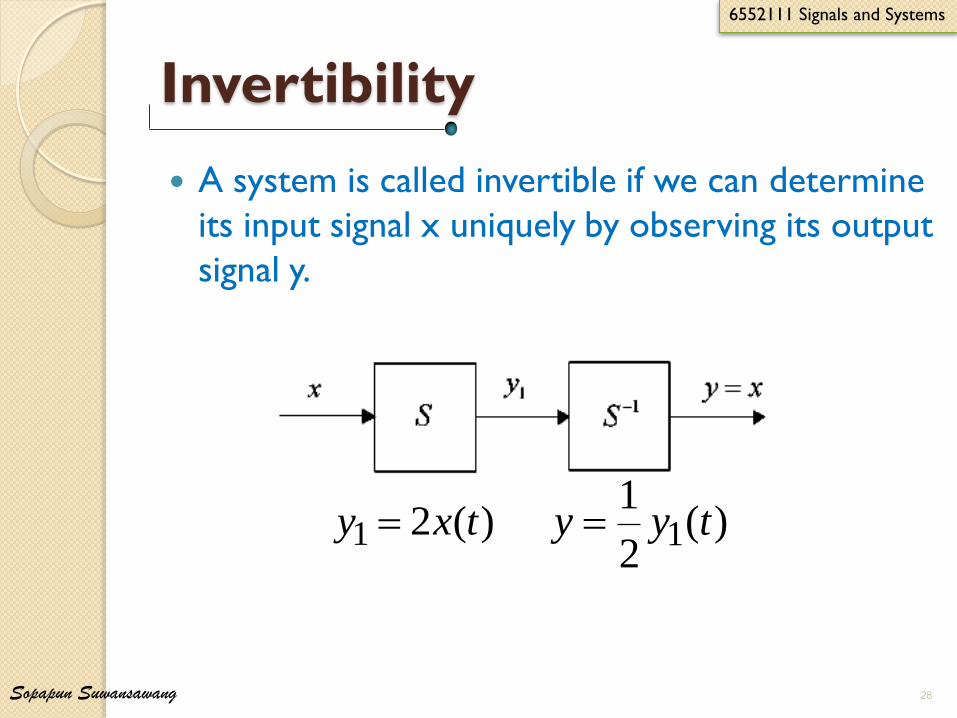
A system is called invertible if we can determine
its input signal x uniquely by observing its output
signal y.
28
Invertibility
6552111 Signals and Systems
Sopapun Suwansawang
)(21 txy )(2
11 tyy
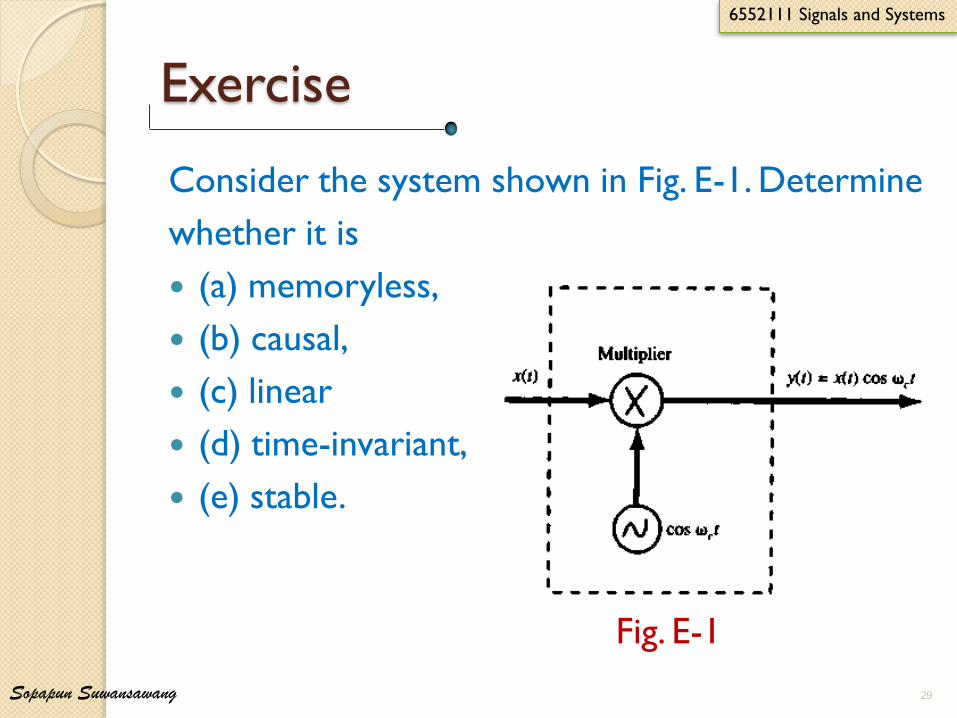
Exercise
Consider the system shown in Fig. E-1. Determine
whether it is
(a) memoryless,
(b) causal,
(c) linear
(d) time-invariant,
(e) stable.
29
6552111 Signals and Systems
Sopapun Suwansawang
Fig. E-1