Embed Size (px)
DESCRIPTION
It shows the basic understanding for control systems.
Citation preview

Feedback control system Feedback control system characteristiccharacteristic
SMJ 4283 / 05INTRODUCTION TO CONTROL SYSTEMS

Second Order System:
• We need to adjust the system parameter in order to obtain desired output. The performance of control system usually specified in both transient and steady state response.

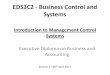
E.g :spring-mass-damper system
i/p isi/p is xxii o/p iso/p is x xoo
TF = =TF = =xxoo
xxii
k/m
DD22 +(c/m)D +k/m
xo( t )( t )
cckxi
m
Mathematical model of the system:Mathematical model of the system:
FFSS ( t ) = k ( x ( t ) = k ( xii – x – xo o ))
FFDD ( t ) = ( t ) = c c D xD xoo( t )( t )
FFM M = m D= m D2 2 xxoo
FFSS -F -FD D - F- FM M = 0= 0

•Using ‘s’ operator is the i/p o/p relation:
•Or in general form, we can re-write this
relationship
/)/(
/
)(
)(2 mksmcs
mk
sx
sx
i
o
2)(
)(22
2
nn
n
i
o
ss
K
sx
sx
km2 ratio, damping and
/ frequency, natural where
c
mkn

21
2nd
d
2
22
2
1tan
:ntdisplaceme phase is and
1
frequency damping is where
)sin(1
11)(
is response timelaplace, inverse &fraction partial using
/1 x(s) where)2(s
1)(
tety
ss
K
ssy
dt
nn
n
n
2nd order with unit step input

2nd order with unit step input
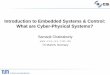
• There are three possibilities of time responses for 2nd order with unit step input. These possibilities are depending on the value of the damping ratio.
• Lets consider the general form of 2nd order system:
2)(
)(22
2
nn
n
i
o
ss
K
sx
sx

The roots of characteristic equation (of the transfer function)
1 , 221 nns
1. If ζ = 0, system is undamped. Roots are complex with Im value only.
2. If 0 < ζ < 1, roots are complex and conjugate. Closed loop poles (we’ll discuss this later) will be on the left hand side of s-plane diagram. The system is undergoing underdamped and is oscillating.
3. If ζ > 1, roots are real and the system is said to be overdamped. When ζ = 1, roots are repeated and real and the system is critically damped.

Case 1: Transient response specification for undamped
system (ζ =0)
• The transient response of 2nd order with step input is shown as in the figure below.
2 4 80
0.5
1
1.5
2

Comparison of responses with difference damping ratio

Case 2: Transient response specification for underdamped
system (0 < ζ < 1)
• The transient response of 2nd order with step input is shown as in the figure below.

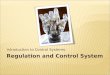
Response of a control system
There are a few characteristic of the transient and steady state response that can be measure from a control system such as delay time, td, rise time, tr, peak time, tp, maximum peak Mp, settling time, ts and steady state error, ess .

Characteristic of transient response:
1. Delay time, td : Time required for the response to reach half of the final value (steady state)
2. Rise time, tr Time required for the system to rise from 10% to 90%, 5% - 95%, 0% - 100%.
3. Peak time, tp Time required for the response to reach the first peak of the overshoot
4. Maximum overshoot (first peak of the overshoot)
5. Settling time, ts Time required for the system to settle and remained within 2% of final

Rise time, trFrom definition rise time is time required for the system to rise from 10% to 90%, 5% - 95%, 0% - 100%. Let’s consider tr from 0% to 100%, i.e. from y(0) = 0 to y(tr) = u or for unity step input, y(tr) = 1:
2
2
2
1 and cos whereon manipulatiafter
1)sin(1
11)( tr,at t hence
)sin(1
11)(
is response input time steporder first general
ndd
dt
dt
tr
tetry
tety
n
n

Peak Time
Time required for the response to reach the first peak of the overshoot. The peak time can be obtained by differentiating y(t) hence dy/dt and knowing at the maximum peak, dy/dt = 0. Therefore:
dn
p
dn
p
tnpd
p
t
t
etdt
tdypn
3
1
1
01
sin)(
22
21
2

Maximum peak, Mp
Maximum peak occur at time t = tp,
%100 overshoot of percentage Therefore
1)(
,tpat t hence
1
11)(
21/
)sin(
2
p
pp
d
tt
M
etyM
ety dn

Settling time, ts
• Time required for the system to settle and remained within 2% of final
• Settling time for underdamped second order system with step input and is given as:
nst
4