Embed Size (px)
Citation preview

Intelligent Maneuver Automation –cooperative hazard avoidance in realtime
(IMAGinE)Bernd LehmannVolkswagen AG
08.03.2018

IMAGinE at a glance
Project partner Opel (coordinator), BMW, Bosch, Continental, Daimler, Hessen Mobil, IPG, MAN, Nordsys, TU Munich, Volkswagen, WIVW
Objective Develop a basis for collective perception and cooperative decision making and cooperative maneuver planning between vehicles and between vehicles and infrastructure
Timing 2016/09/01 – 2020/08/31
Budget 38.2 M€
Funding 17.9 M€
Funded by Federal Ministry for Economic Affairs and Energy
3/8/2018 2IMAGinE

OVERVIEWVision and motivationCore innovationsCooperative functionsTechnological approachProject structure und partners
3/8/2018 4IMAGinE

OVERVIEWVision and motivationCore innovationsCooperative functionsTechnological approachProject structure und partners
3/8/2018 5IMAGinE

Vision “Talk first, then act.“
3/8/2018 6
IMAGinE is paving the way for cooperative driving.
Communication-based coordination of driving maneuvers enables substantial improvement for preventive support of accident-free driving optimization of traffic flow and thus to arrive in a more safe, efficient andcomfortable manner.
IMAGinE

Without cooperationWith cooperation
MotivationAutomation: requires increased cooperation
Why cooperative behavior will be relevant also in an automated world: • Increasing degrees of automation aim at higher comfort and safety levels for the
driver• Automated systems tend to behave more defensively than the average driver• In certain situations, automated systems depend on cooperative behavior of other
road users
3/8/2018 8
Free drivingIMAGinE

OVERVIEWVision and motivationCore innovationsCooperative functionsTechnological approachProject structure und partners
3/8/2018 IMAGinE 10

Core innovationsat a glance
3/8/2018 11
IMAGinE fundament• Results from previous research projects• ETSI and CEN standards• CAR 2 CAR Communication Consortium: day 1 use cases
IMAGinE

OVERVIEWVision and motivationCore innovationsCooperative functionsTechnological approachProject structure und partners
3/8/2018 13IMAGinE

Cooperative functionsOverview
14IMAGinE3/8/2018
F1
F2
F3
F4
F5
F6
Cooperative merging on highways
Cooperative longitudinal control on freeways
Cooperative passing on rural roads
Cooperative strategic traffic distribution
Cooperative turning at junctions
Cooperative passing by heavy-goods vehicles on freeways

3/8/2018 15
Cooperative merging on highways (F1)
© CAR 2 CAR Communication Consortium
IMAGinE

3/8/2018 16
Cooperative longitudinal control on freeways (F2)
© CAR 2 CAR Communication Consortium
IMAGinE

173/8/2018
Cooperative passing on rural roads (F3)
© CAR 2 CAR Communication Consortium
IMAGinE

18
Cooperative strategic traffic distribution (F4)
© CAR 2 CAR Communication Consortium
IMAGinE3/8/2018

3/8/2018 19
Cooperative turning at junctions (F5)
© CAR 2 CAR Communication Consortium
IMAGinE

3/8/2018 20
Cooperative passing by heavy-goods vehicles on freeways (F6)
© CAR 2 CAR Communication Consortium
IMAGinE

OVERVIEWVision and motivationCore innovationsCooperative functionsTechnological approachProject structure und partners
3/8/2018 IMAGinE 21

Project structureInteraction of sub-projects
3/8/2018 22
SP 6 Project management
SP 2 Cooperative functions and system architecture
SP 4 Vehicle integration
SP 1 Analysis of cooperation scenarios
SP 3 Cooperative Technologies
SP 5 Evaluation und testing
IMAGinE

23
Project structureWork breakdown structure
3/8/2018 IMAGinE

OVERVIEWVision and motivationCore innovationsCooperative functionsTechnological approachProject structure und partners
3/8/2018 IMAGinE 30

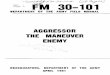
IMAGinE vehicle architecture
3/8/2018 34
Framework2Framework gateway
IMAGinE environmental model (fusion with V2X information), Collective perception
partner-specific environmental model(fusion: sensors, map and objects)
arbitrator
support server
map
cooperative functions maneuver planning
controller
positioning module
«interface»DriveControl
«interface»MMI
IMAG
inE
unit
− de-/encoding− hybrid channel resources
ComStack
«interface»ITS-G5
«interface»LTE
common componentspartner-specific components
vehicle sensors
environmental sensors
environmental model
consistent environmental data
V2X information
maneuver pre-selection
position data map data sensor data
representation of environment maneuver selection
commands instructions
part
ner u
nit
Sensor system
Wireless communication
WaveBee
driver input
IMAGinE

Contact detailsProject coordinator
Dr. Steffen KnappEE Advanced Technology - Vehicle CommunicationGME Electrical Systems & Infotainment
Opel Automobile GmbH T: +49-6142-7-65582Bahnhofplatz F: +49-6142-7-75759IPC S4-01 E: [email protected] Rüsselsheim
3/8/2018 IMAGinE 35

Contact details Project office
European Center for Information and Communication Technologies (EICT) GmbH
EICT GmbH T: +49-30-3670-235-000EUREF-Campus 13 F: +49-30-3670-235-201D-10829 Berlin E: [email protected]
3/8/2018 IMAGinE 36