Embed Size (px)
Citation preview
1
1
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Physical Design
Jason Cong UCLA
Majid Sarrafzadeh Northwestern
2
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Outline
l PART I: Introduction & Motivation
l PART II: Partitioning, Floorplanning, and Placemenet
l PART III: Routing
l PART IV: Conclusion
2
3
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
PART I:Introduction & Motivation
4
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Introduction & Motivation
l Concurrent optimization:l problems are getting complex
l need quick evaluation of a number of alternatives
l Existing algorithms are “incremental”l what can we say about the quality of the final solution?
l when to do, and how much, incremental “moves”?
l A more fundamental concept: Given a solution, assessits quality
l Design for change
l The right data structures
3
5
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Current Methods
l Ad-hoc (low-temp annealing or rip-up and reroute)
l No or very little understanding of the solution quality
l Painful and slow updates
l May have undesired global impact
l There has been very little done on the topic
l (We provide a reasonable list of references as a startingpoints: data structures, layout algorithms, synthesisalgorithms, etc)
l Today’s presentation is meant to serve as a motivator
6
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
PART II:Partitioning, Floorplanning, and
Placement
4
7
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Partitioning
8
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Partitioning
l An original (hyper)graph and its near-optimal partitioningresults are given.
l An incrementally changed (hyper)graph is obtained byadding/deleting vertices/edges from the original graph.
l Incremental partitioning problem is to find the near-optimal partitioning for the changed (hyper)graphwithout doing from the scratch.
l Incremental partitioning should be much faster than theoriginal partitioning.
l It is preferable to use the existing partitioning results forthe original (hyper)graph.
5
9
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
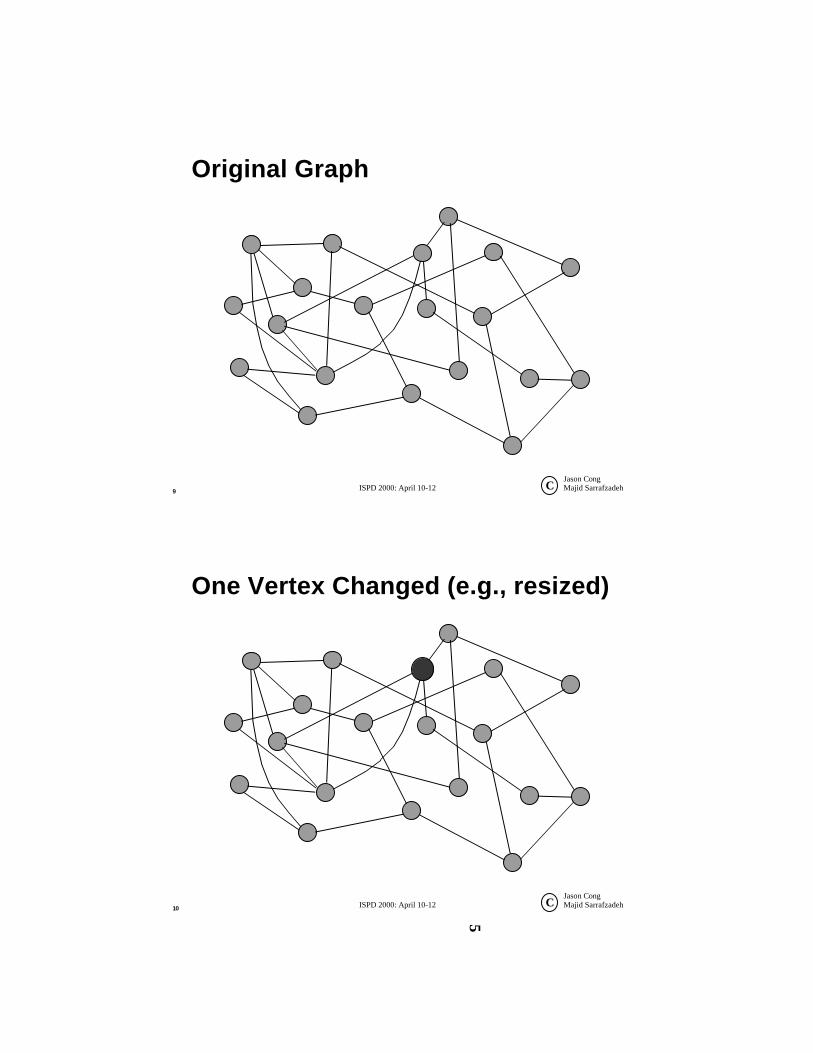
Original Graph
10
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
One Vertex Changed (e.g., resized)
6
11
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
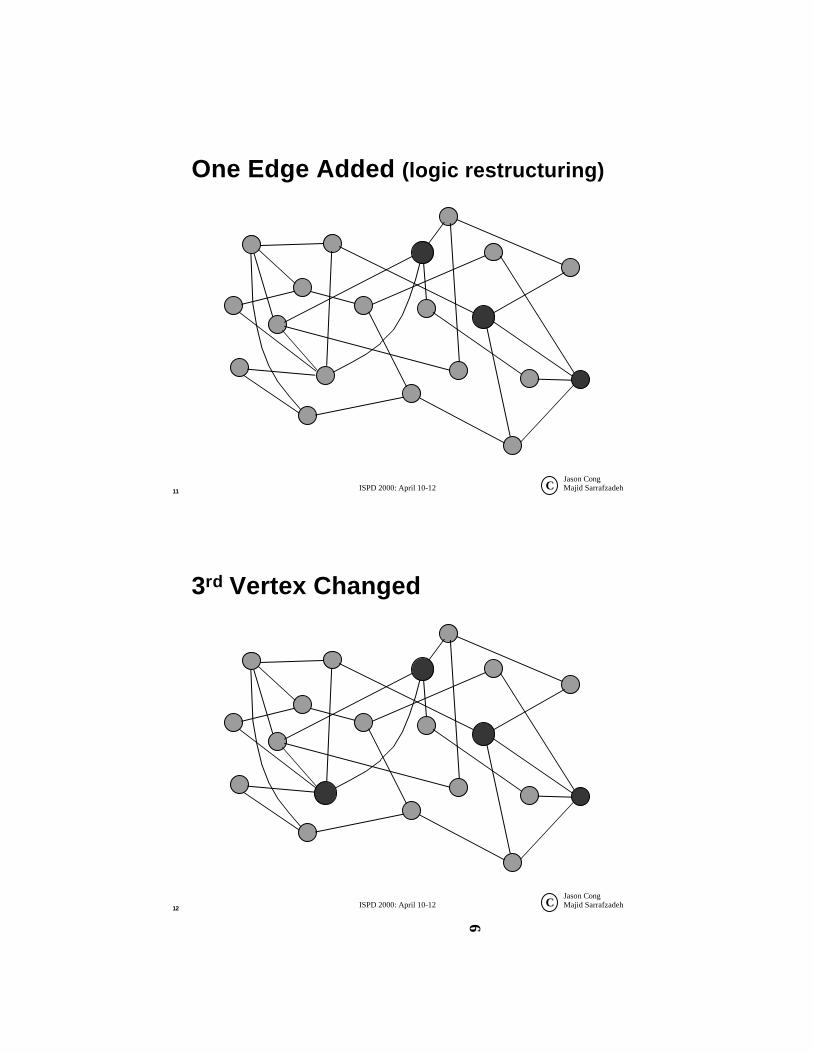
One Edge Added (logic restructuring)
12
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
3rd Vertex Changed
7
13
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
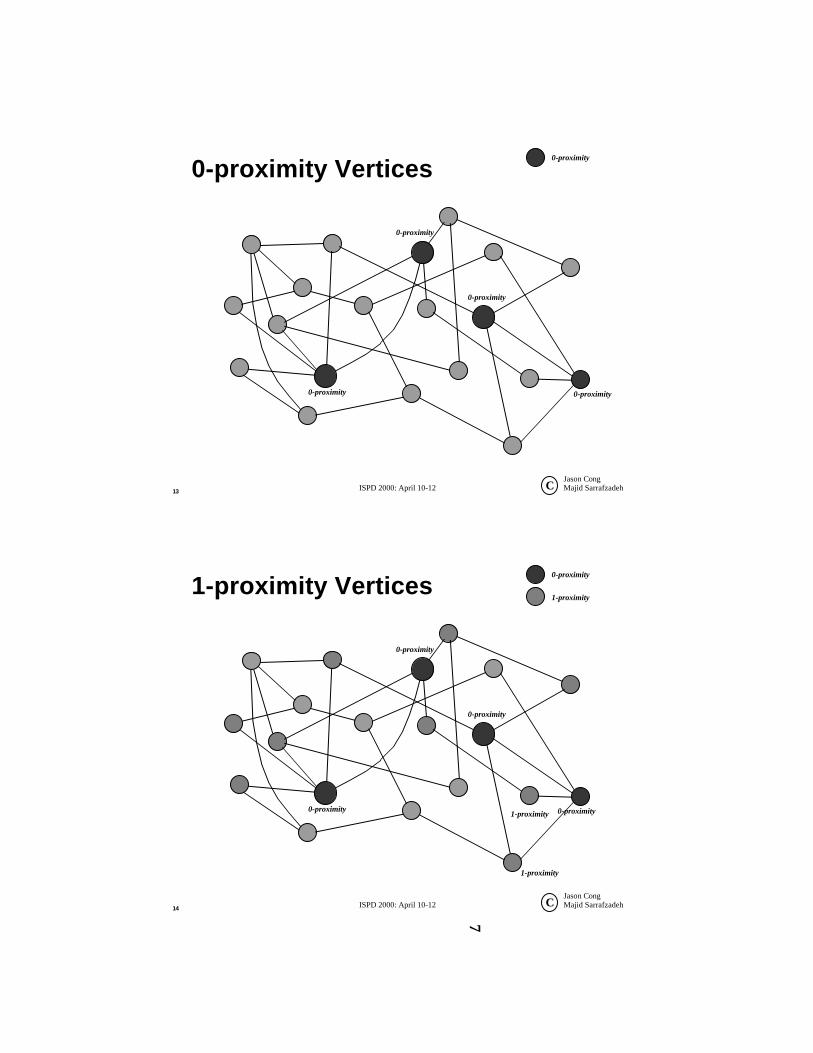
0-proximity Vertices
0-proximity
0-proximity
0-proximity
0-proximity
0-proximity
14
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
1-proximity Vertices
0-proximity
0-proximity
0-proximity
1-proximity
1-proximity
0-proximity
0-proximity1-proximity
8
15
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
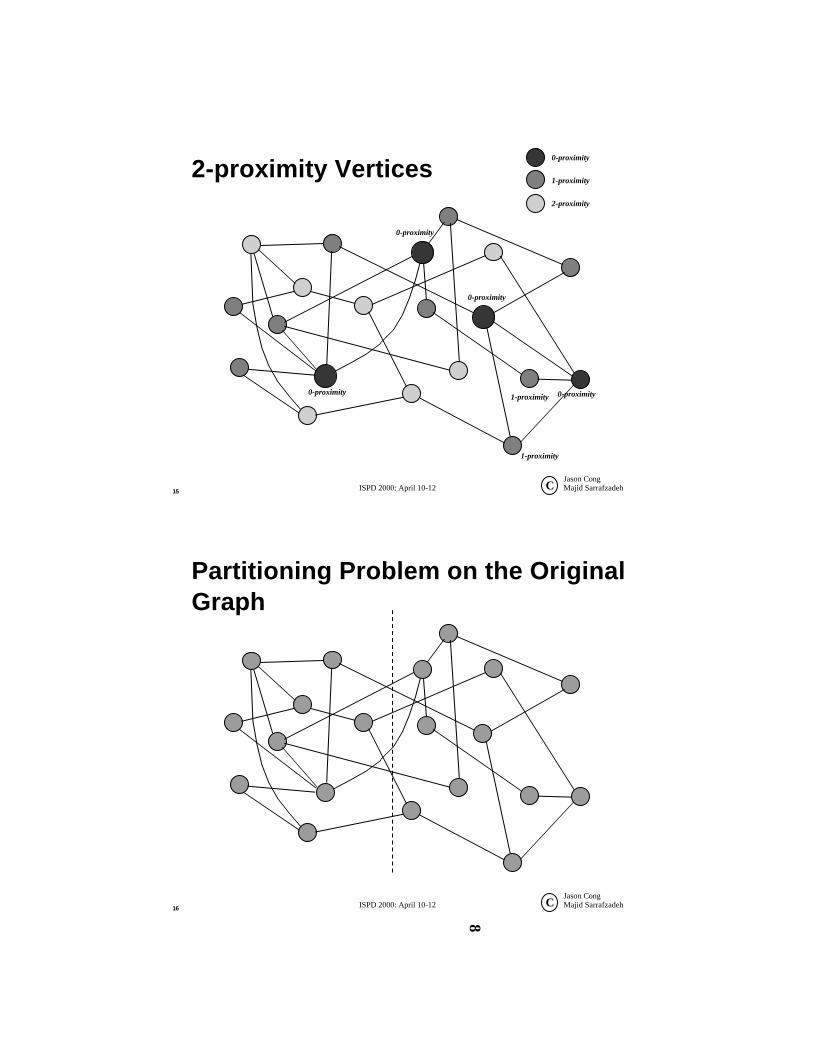
2-proximity Vertices
0-proximity
0-proximity
0-proximity
1-proximity
1-proximity
0-proximity
2-proximity
1-proximity 0-proximity
16
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Partitioning Problem on the OriginalGraph
9
17
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
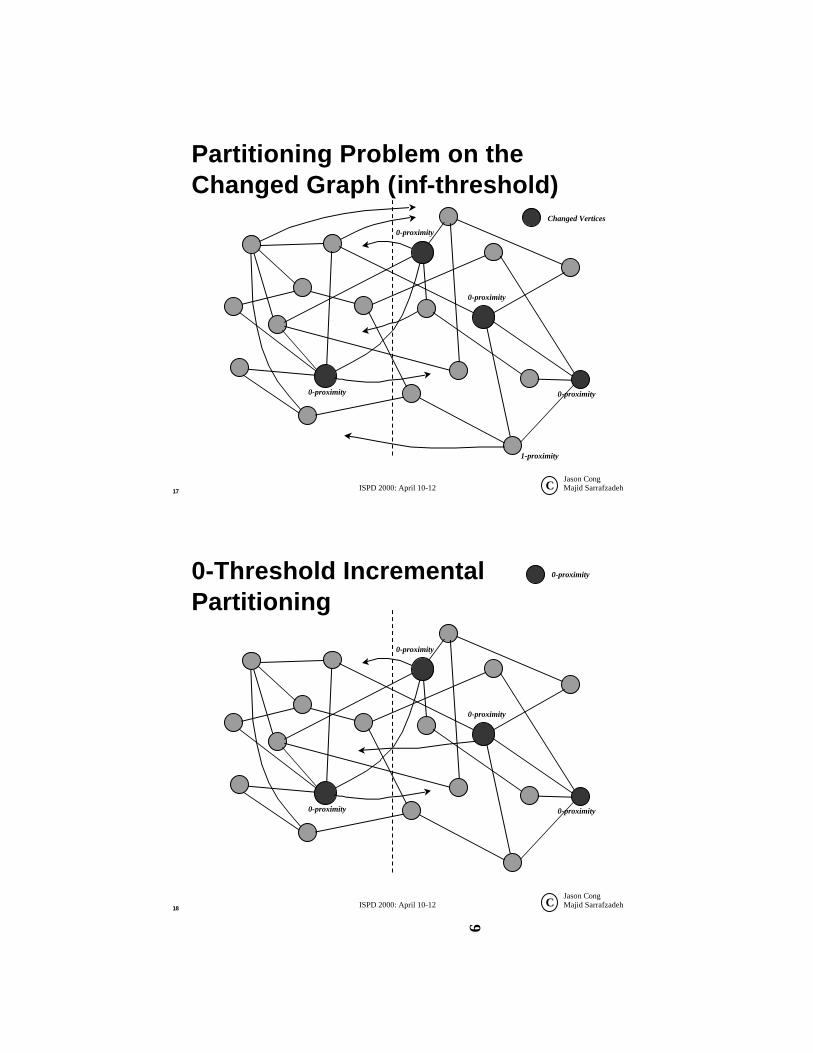
Partitioning Problem on theChanged Graph (inf-threshold)
0-proximity
0-proximity
0-proximity
1-proximity
Changed Vertices
0-proximity
18
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
0-Threshold IncrementalPartitioning
0-proximity
0-proximity
0-proximity
0-proximity
0-proximity
10
19
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
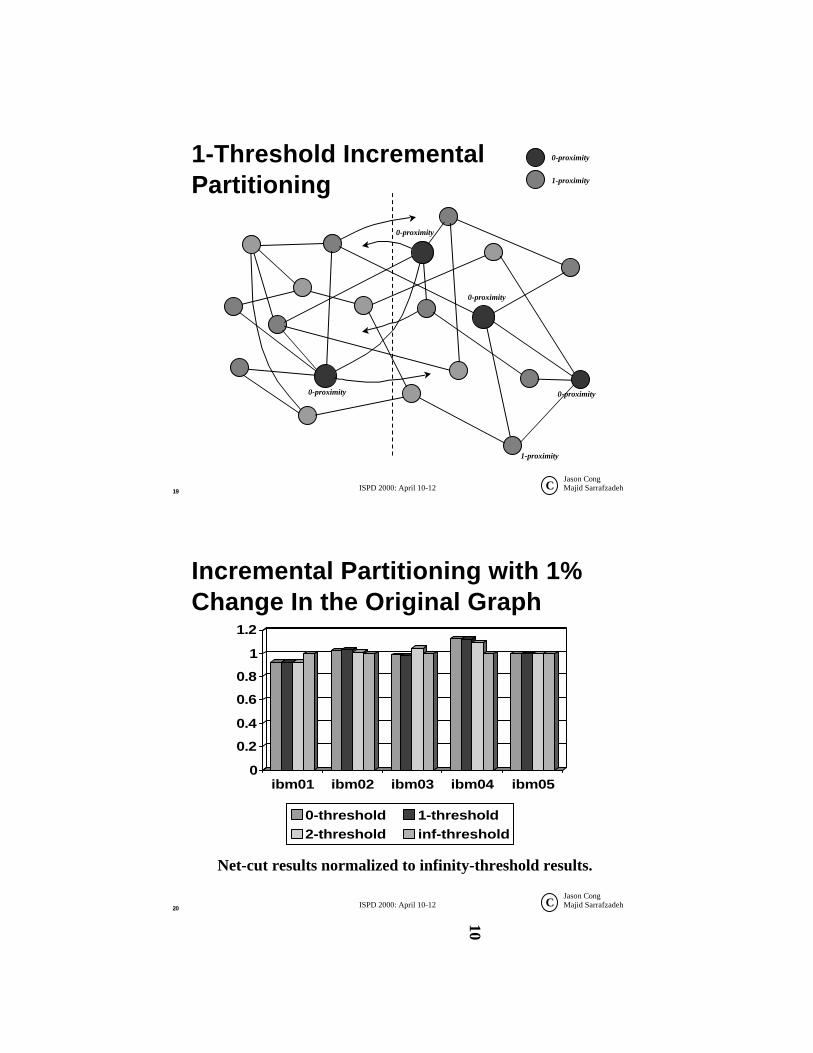
1-Threshold IncrementalPartitioning
0-proximity
0-proximity
0-proximity
1-proximity
1-proximity
0-proximity
0-proximity
20
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Partitioning with 1%Change In the Original Graph
0
0.2
0.4
0.6
0.8
1
1.2
ibm01 ibm02 ibm03 ibm04 ibm05
0-threshold 1-threshold
2-threshold inf-threshold
Net-cut results normalized to infinity-threshold results.

11
21
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Partitioning with 1%Change In the Original Graph
0
0.2
0.4
0.6
0.8
1
ibm01 ibm02 ibm03 ibm04 ibm05
0-threshold 1-threshold
2-threshold inf-threshold
Runtime normalized to infinity-threshold results.
22
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
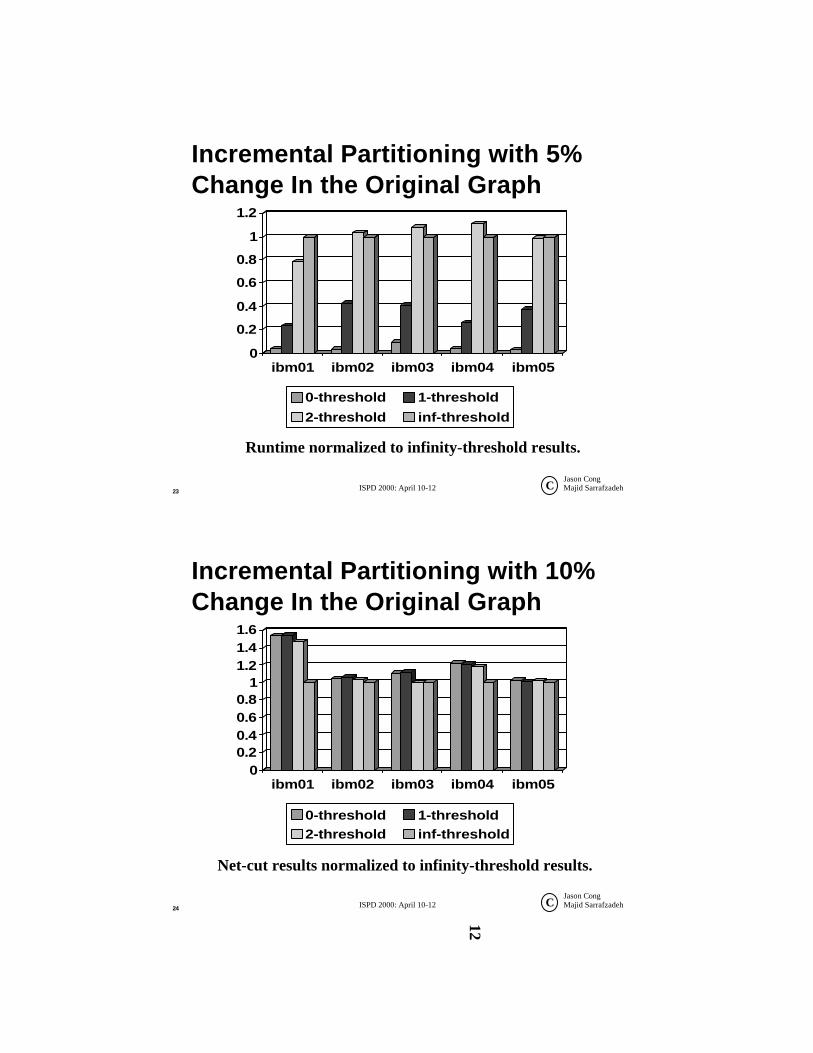
Incremental Partitioning with 5%Change In the Original Graph
0
0.2
0.4
0.6
0.8
1
1.2
1.4
ibm01 ibm02 ibm03 ibm04 ibm05
0-threshold 1-threshold
2-threshold inf-threshold
Net-cut results normalized to infinity-threshold results.
12
23
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Partitioning with 5%Change In the Original Graph
0
0.2
0.4
0.6
0.8
1
1.2
ibm01 ibm02 ibm03 ibm04 ibm05
0-threshold 1-threshold
2-threshold inf-threshold
Runtime normalized to infinity-threshold results.
24
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Partitioning with 10%Change In the Original Graph
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
ibm01 ibm02 ibm03 ibm04 ibm05
0-threshold 1-threshold
2-threshold inf-threshold
Net-cut results normalized to infinity-threshold results.
13
25
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
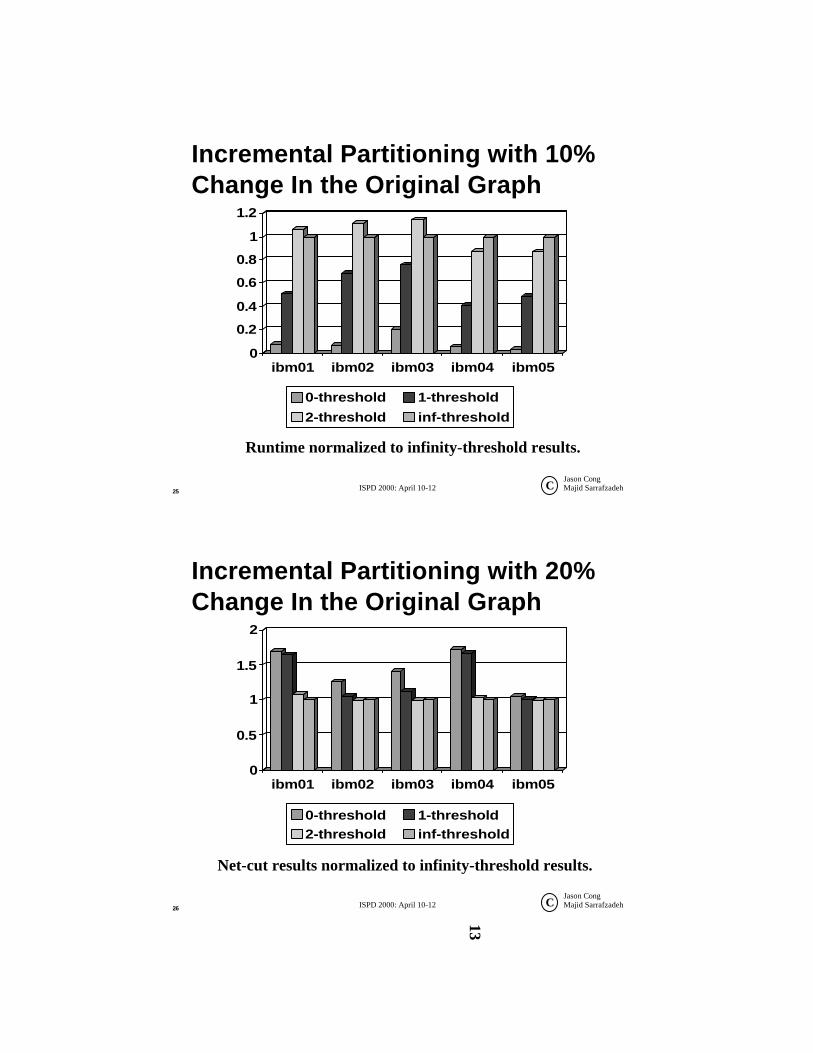
Incremental Partitioning with 10%Change In the Original Graph
0
0.2
0.4
0.6
0.8
1
1.2
ibm01 ibm02 ibm03 ibm04 ibm05
0-threshold 1-threshold
2-threshold inf-threshold
Runtime normalized to infinity-threshold results.
26
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Partitioning with 20%Change In the Original Graph
0
0.5
1
1.5
2
ibm01 ibm02 ibm03 ibm04 ibm05
0-threshold 1-threshold
2-threshold inf-threshold
Net-cut results normalized to infinity-threshold results.
14
27
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
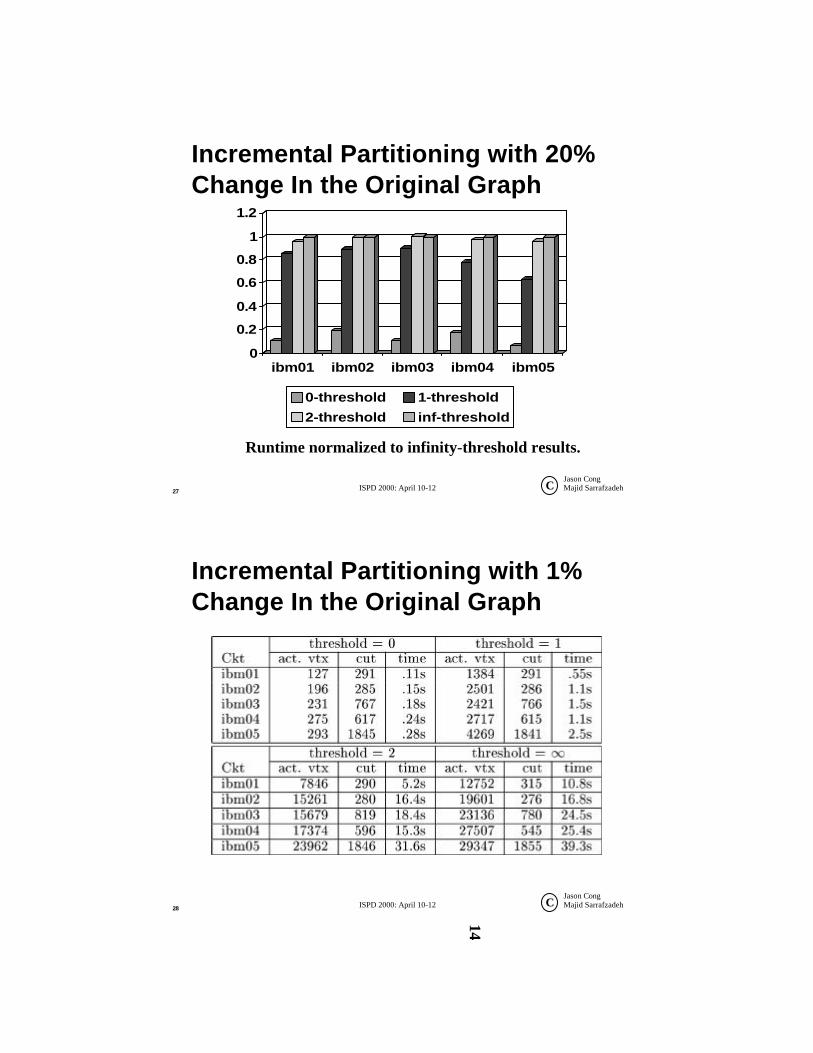
Incremental Partitioning with 20%Change In the Original Graph
0
0.2
0.4
0.6
0.8
1
1.2
ibm01 ibm02 ibm03 ibm04 ibm05
0-threshold 1-threshold
2-threshold inf-threshold
Runtime normalized to infinity-threshold results.
28
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Partitioning with 1%Change In the Original Graph
15
29
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
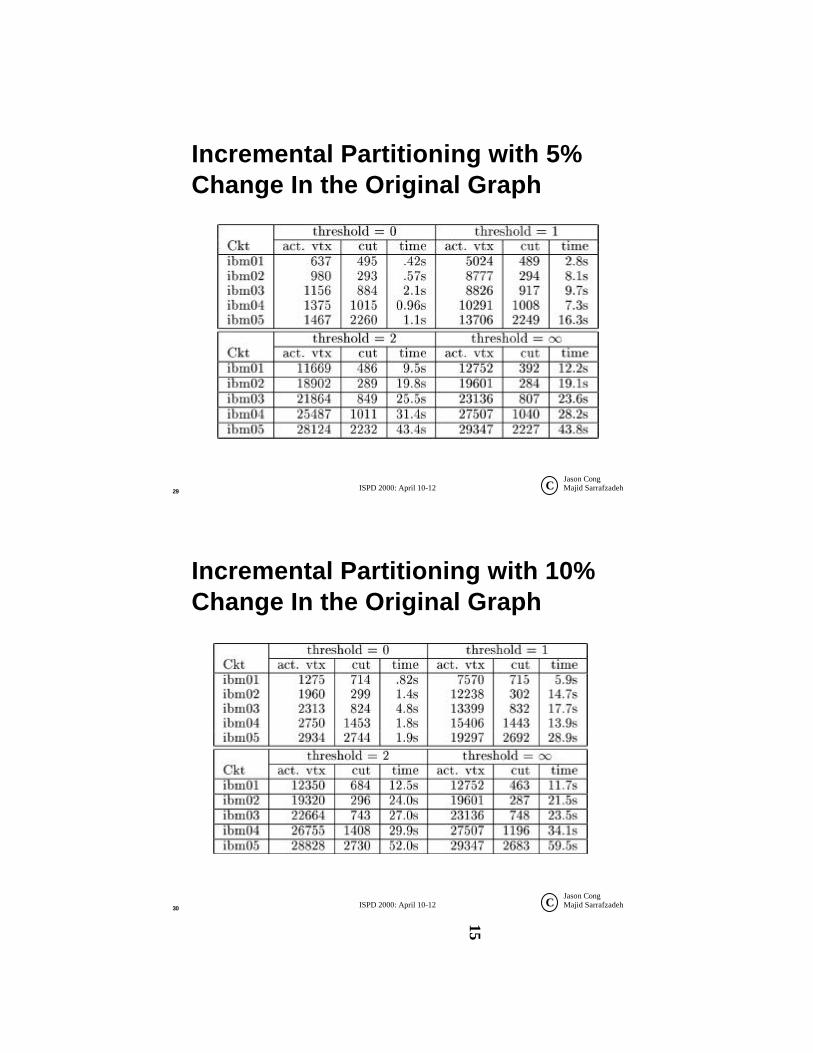
Incremental Partitioning with 5%Change In the Original Graph
30
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Partitioning with 10%Change In the Original Graph
16
31
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
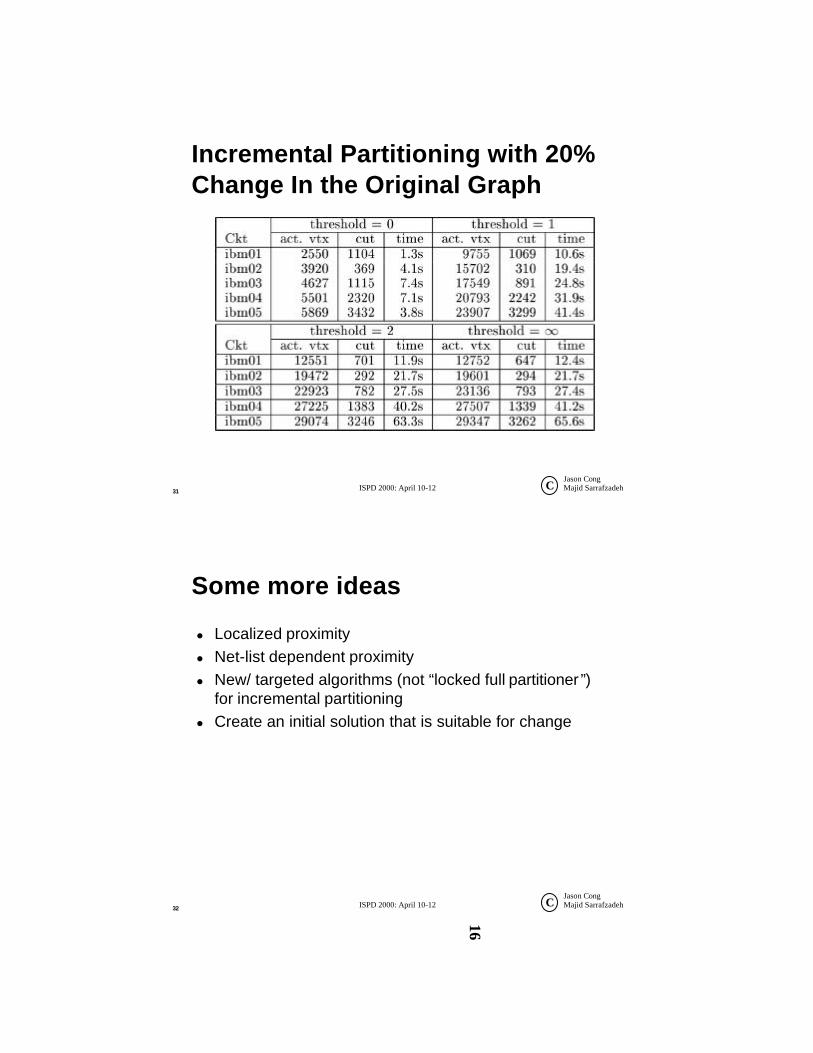
Incremental Partitioning with 20%Change In the Original Graph
32
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Some more ideas
l Localized proximity
l Net-list dependent proximity
l New/ targeted algorithms (not “locked full partitioner ”)for incremental partitioning
l Create an initial solution that is suitable for change

17
33
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Floorplanning
34
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Floorplanning
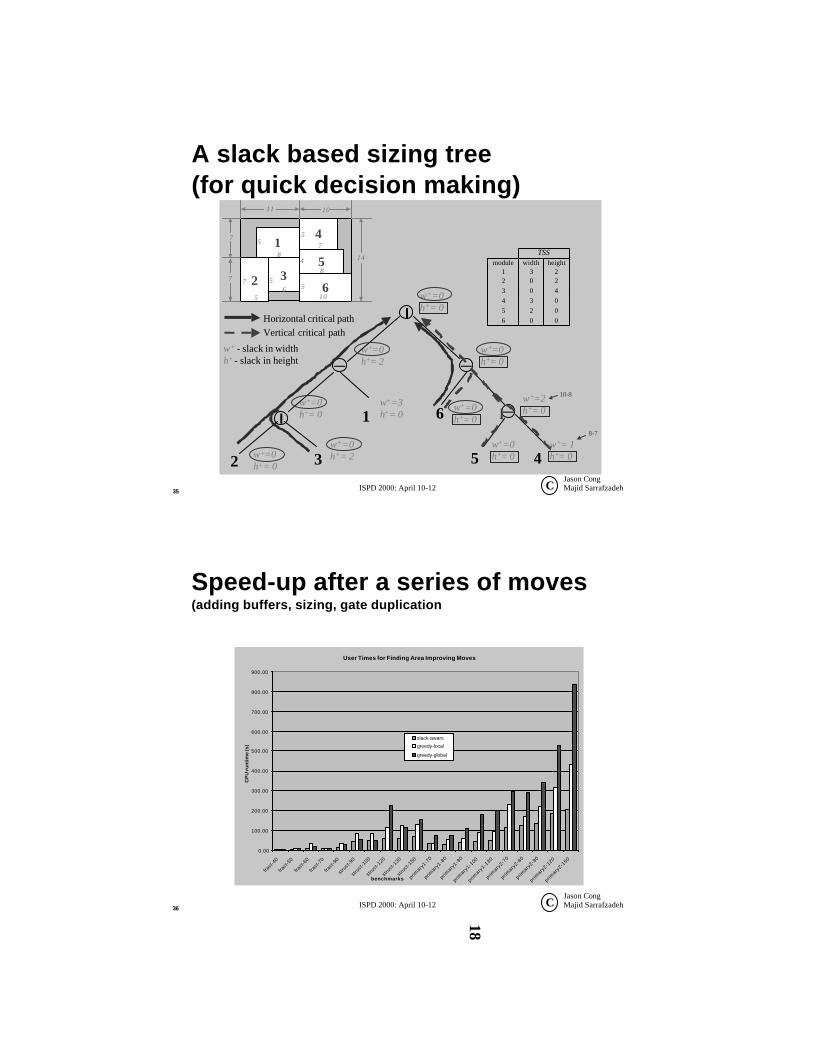
l Do not resize the floorplan if not needed or if not needed“badly” (based on an enhanced sizing tree) [Crenshaw-Sarrafzadeh]
Time Ratio Plot
1
10
100
1000
10000
Vec1x Vec5x Vec10x Vec50x Vec100x
Vector File
Ex10
Ex20
Ex50
18
35
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
A slack based sizing tree(for quick decision making)
w+ - slack in widthh+ - slack in height
Horizontal critical pathVertical critical path
6
1
2 3
4
5
7
56
105
4
5
5
5
87
8
1011
14
7
7
8-7
2
1 6
53w+=0h+= 2w+=0
h+= 0
w+=0h+= 0
w+=3h+= 0
w+=0h+= 2
w+=0h+= 0
w+=0h+= 0
4
w+=0h+= 0
w+=0h+= 0
w+= 1h+= 0
w+=2h+= 0
10-8
TSSmodule width height
1 3 22 0 23 0 44 3 05 2 06 0 0
36
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
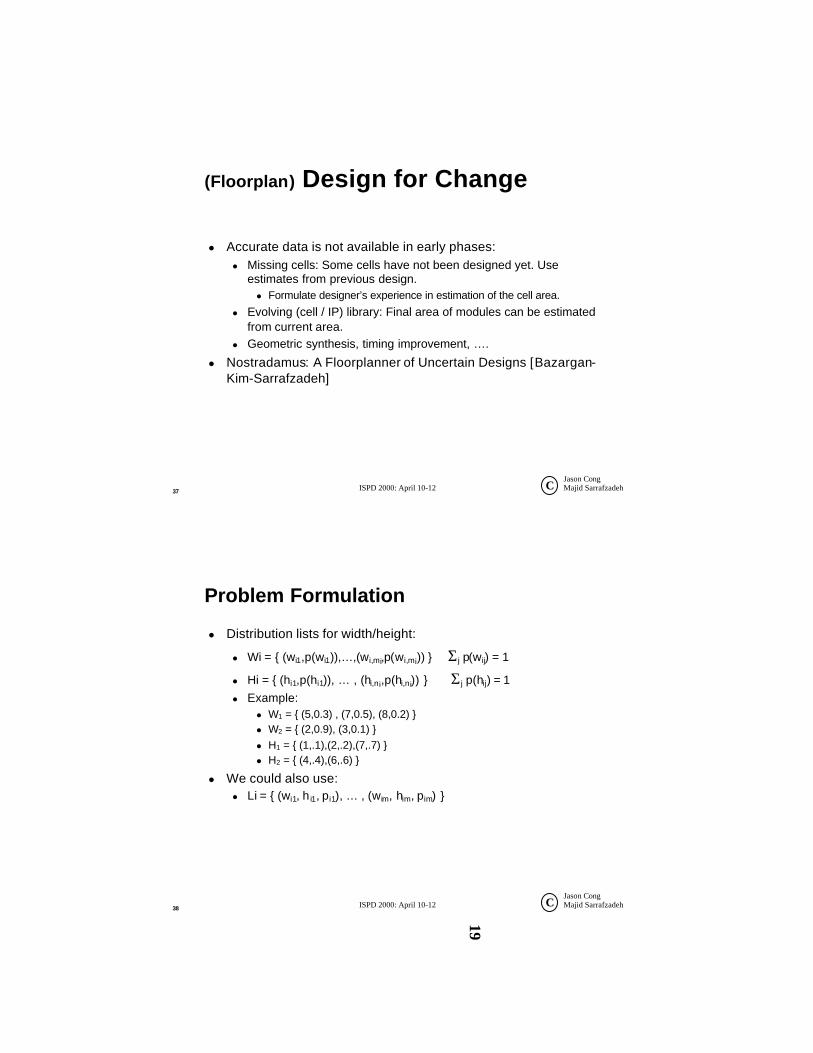
Speed-up after a series of moves(adding buffers, sizing, gate duplication
User Times for Finding Area Improving Moves
0.00
100.00
200.00
300.00
400.00
500.00
600.00
700.00
800.00
900.00
fract
-40
fract
-50
fract
-60
fract
-70
fract
-90
stru
ct-9
0
stru
ct-1
00
stru
ct-1
20
stru
ct-1
30
stru
ct-1
50
primary
1-70
primary
1-80
primary
1-90
primary
1-100
primary
1-130
primary
2-70
primary
2-80
primary
2-90
primary
2-120
primary
2-150
benchmarks
CP
U r
un
tim
e (s
)
slack-aware
greedy-local
greedy-global
19
37
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
(Floorplan) Design for Change
l Accurate data is not available in early phases:l Missing cells: Some cells have not been designed yet. Use
estimates from previous design.l Formulate designer’s experience in estimation of the cell area.
l Evolving (cell / IP) library: Final area of modules can be estimatedfrom current area.
l Geometric synthesis, timing improvement, ….
l Nostradamus: A Floorplanner of Uncertain Designs [Bazargan-Kim-Sarrafzadeh]
38
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Problem Formulation
l Distribution lists for width/height:
l Wi = { (wi1,p(wi1)),…,(wi,mi,p(wi,mi)) } Σj p(wij) = 1
l Hi = { (hi1,p(hi1)), … , (hi,ni,p(hi,ni)) } Σj p(hij) = 1
l Example:l W1 = { (5,0.3) , (7,0.5), (8,0.2) }l W2 = { (2,0.9), (3,0.1) }
l H1 = { (1,.1),(2,.2),(7,.7) }l H2 = { (4,.4),(6,.6) }
l We could also use:l Li = { (wi1, h i1, pi1), … , (wim, him, pim) }
20
39
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
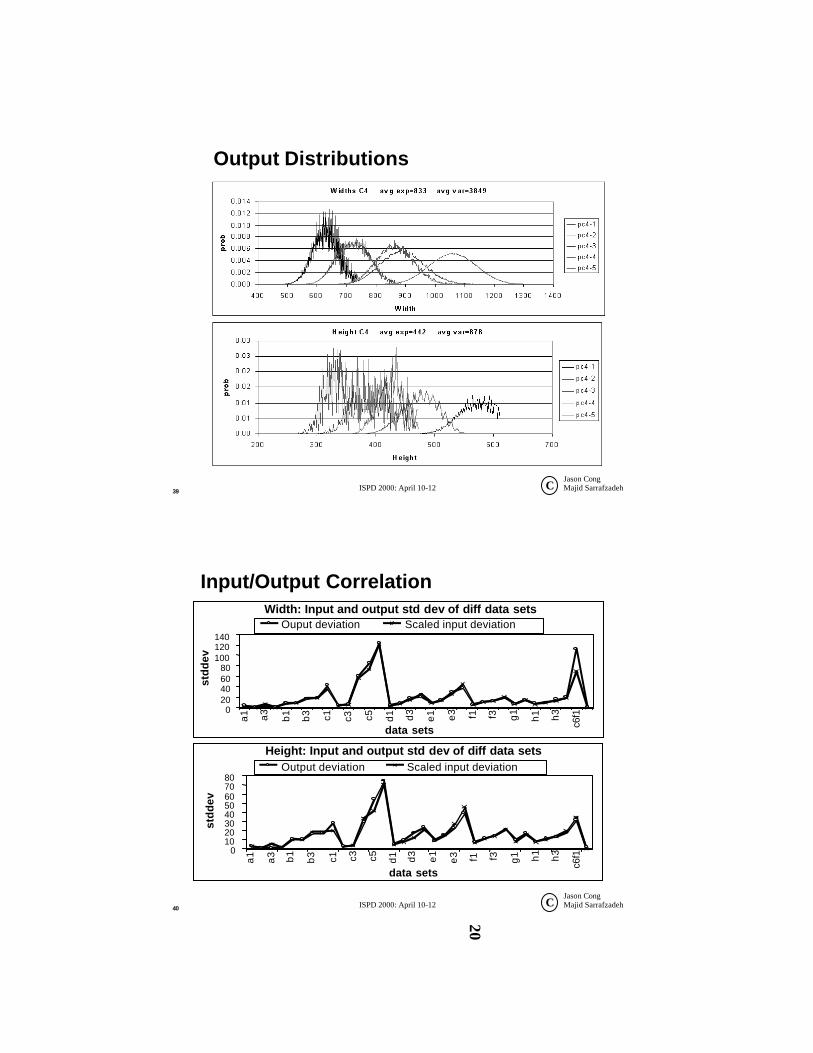
Output Distributions
40
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Input/Output CorrelationWidth: Input and output std dev of diff data sets
020406080
100120140
a1 a3
b1
b3 c1 c3 c5 d1 d3
e1 e3 f1 f3 g1
h1 h3
c6f1
data sets
std
de
v
Ouput deviation Scaled input deviation
Height: Input and output std dev of diff data sets
01020304050607080
a1
a3 b1
b3 c1 c3 c5 d1 d3
e1
e3 f1 f3 g1 h1
h3
c6f1
data sets
std
de
v
Output deviation Scaled input deviation
21
41
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
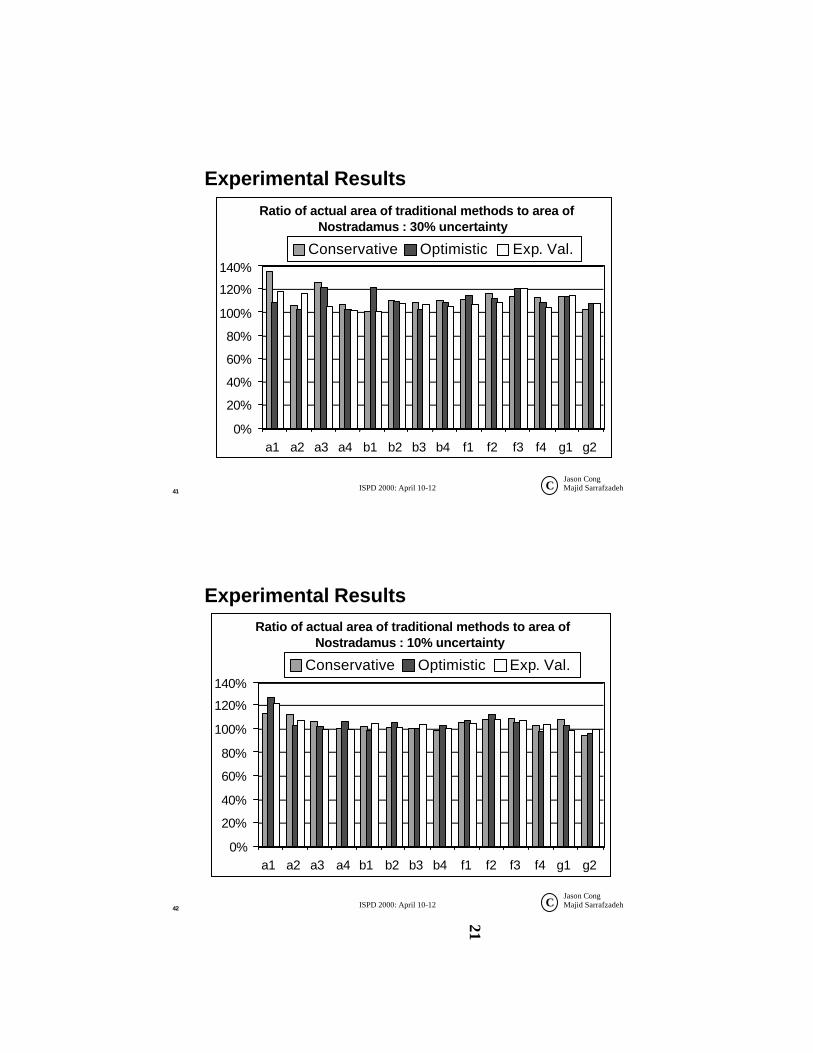
Experimental Results
Ratio of actual area of traditional methods to area of Nostradamus : 30% uncertainty
0%
20%
40%
60%
80%
100%
120%
140%
a1 a2 a3 a4 b1 b2 b3 b4 f1 f2 f3 f4 g1 g2
Conservative Optimistic Exp. Val.
42
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Experimental Results
Ratio of actual area of traditional methods to area of Nostradamus : 10% uncertainty
0%
20%
40%
60%
80%
100%
120%
140%
a1 a2 a3 a4 b1 b2 b3 b4 f1 f2 f3 f4 g1 g2
Conservative Optimistic Exp. Val.
22
43
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Placement
44
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Placement Problem
Input:• A set of cells and their complete information (a cell library).• Connectivity information between cells (netlist information).
Output:• A set of locations on the chip: one location for each cell.
Goal:• Total chip area and wirelength, under timing constraints.
Challenge:• Rapid growing circuit size (> 1 million).• Multi objectives (timing constraint, routability)
23
45
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
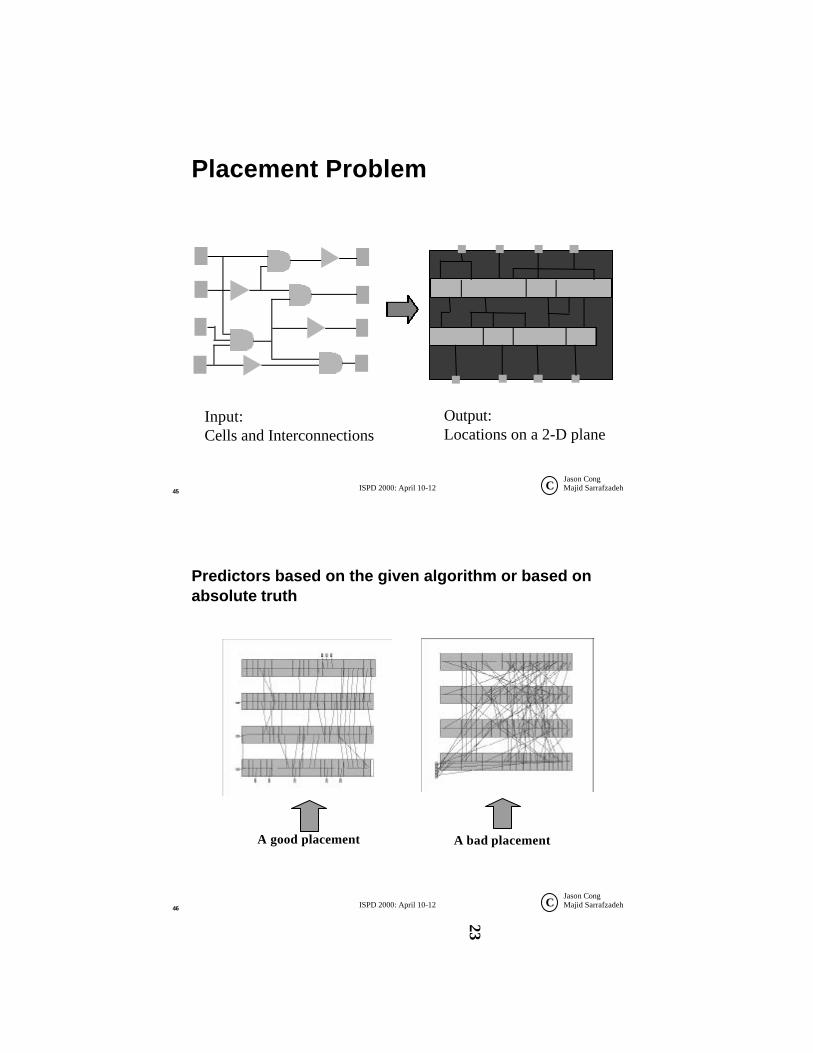
Placement Problem
Input:Cells and Interconnections
Output:Locations on a 2-D plane
46
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Predictors based on the given algorithm or based onabsolute truth
A bad placementA good placement
24
47
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Placement Algorithms (both incremental, so do
we understand incremental?)
l Constructive Placemente.g. Analytical optimizationBuild up placement from scratch.Fast, but most of them lack of solution quality.
l Iterative Improvemente.g. Simulated annealingGradually improve existing solutions.Slow, but with good solution quality, easy toconsider multi-objectives.
48
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Placement
Caused by:
l Adding cells/nets
l Meeting timing constraintswhile minimizing total chip area.
l Reducing congestionA post processing algorithm is more effective
25
49
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
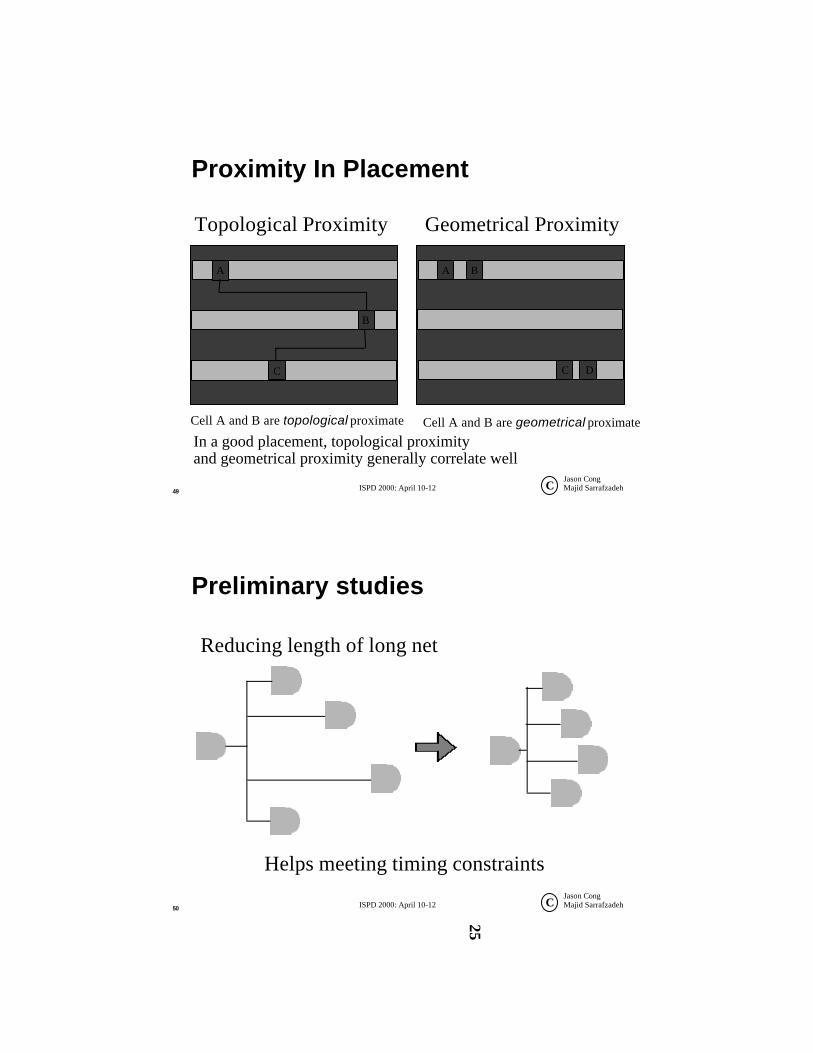
Proximity In Placement
Topological Proximity Geometrical Proximity
A
B
C
BA
Cell A and B are topological proximate Cell A and B are geometrical proximateIn a good placement, topological proximity and geometrical proximity generally correlate well
C D
50
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Preliminary studies
Reducing length of long net
Helps meeting timing constraints
26
51
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
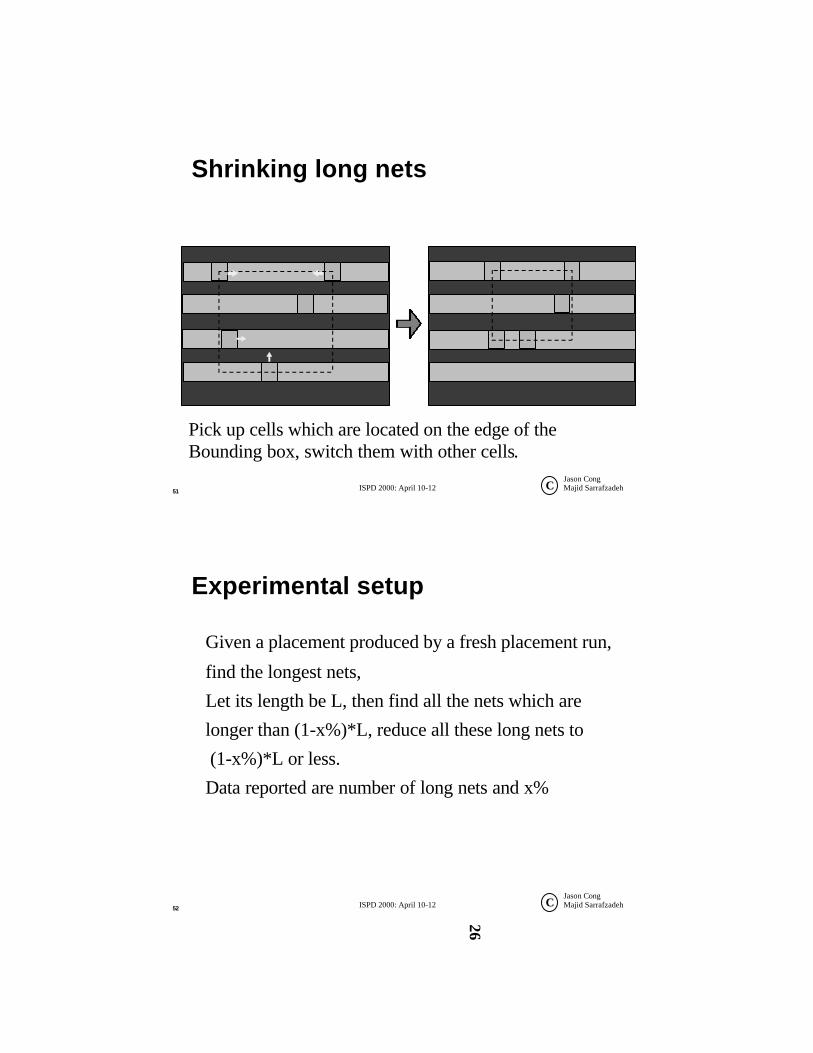
Shrinking long nets
Pick up cells which are located on the edge of theBounding box, switch them with other cells.
52
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Experimental setup
Given a placement produced by a fresh placement run,
find the longest nets,Let its length be L, then find all the nets which arelonger than (1-x%)*L, reduce all these long nets to (1-x%)*L or less.Data reported are number of long nets and x%
27
53
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
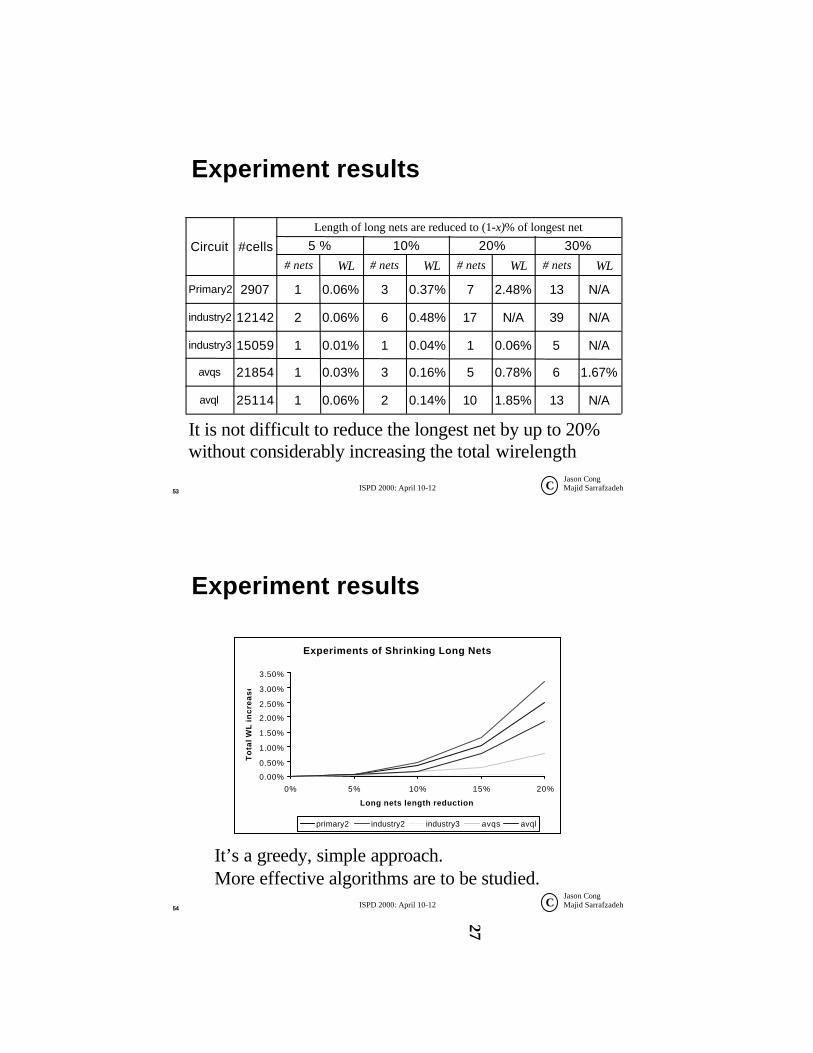
Experiment results
It is not difficult to reduce the longest net by up to 20% without considerably increasing the total wirelength
N/A131.85%100.14%20.06%125114avql
1.67%60.78%50.16%30.03%121854avqs
N/A50.06%10.04%10.01%115059industry3
N/A39N/A170.48%60.06%212142industry2
N/A132.48%70.37%30.06%12907Primary2
�WL# nets�WL# nets�WL# nets�WL# nets
30%20%10%5 %
Length of long nets are reduced to (1-x)% of longest net
#cellsCircuit
54
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Experiment results
Experiments of Shrinking Long Nets
0.00%
0.50%
1.00%
1.50%
2.00%
2.50%
3.00%
3.50%
0% 5% 10% 15% 20%
Long nets length reduction
To
tal
WL
in
cre
as
e
primary2 industry2 industry3 avqs avql
It’s a greedy, simple approach.More effective algorithms are to be studied.
28
55
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
PART III:Incremental Routing
56
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Routing Problem
l Basic operations:l Net removal (easy)
l Net addition (focus of this talk)
l Objectivel Preserve as much previous results as possible
l Applicationsl Changes of the netlist due to functionality modification
l Modification of placement due to performance consideration
l Change of a route (width, spacing, possible buffer insertion)after post-layout extraction and simulation
l ...
29
57
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
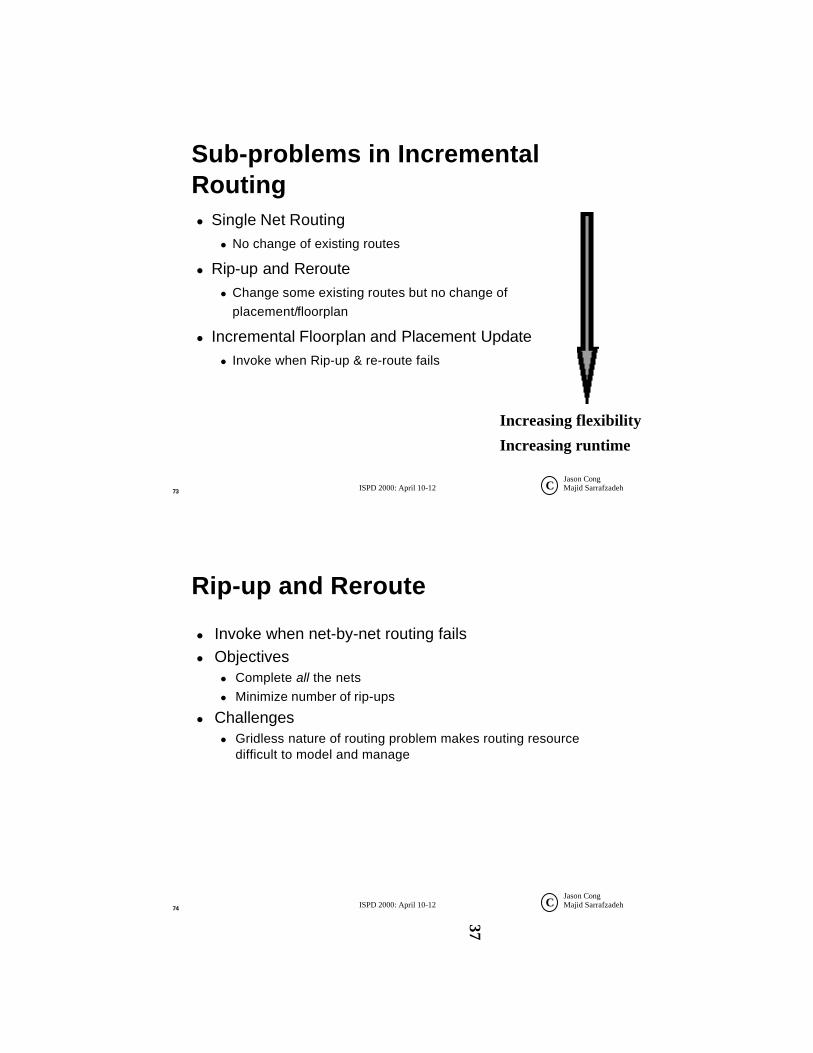
Sub-problems in IncrementalRouting
l Single Net Routing
l No change of existing routes
l Rip-up and Reroute
l Change some existing routes but no change of
placement/floorplan
l Incremental Floorplan and Placement Update
l Invoke when Rip-up & re-route fails
Increasing flexibility
Increasing runtime
58
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Single Net Routing Problem
l Problem FormulationGiven
- a set of existing routes/obstacles
- the width and spacing of a given net
Find a valid route for this net
l Need for gridless (GLS) routingl Variable wire width for delay optimization
l Variable wire spacing for noise constraints
l Challengesl Construction of GLS routing graph
l Representation of GLS routing graph
l Search on GLS routing graph
30
59
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
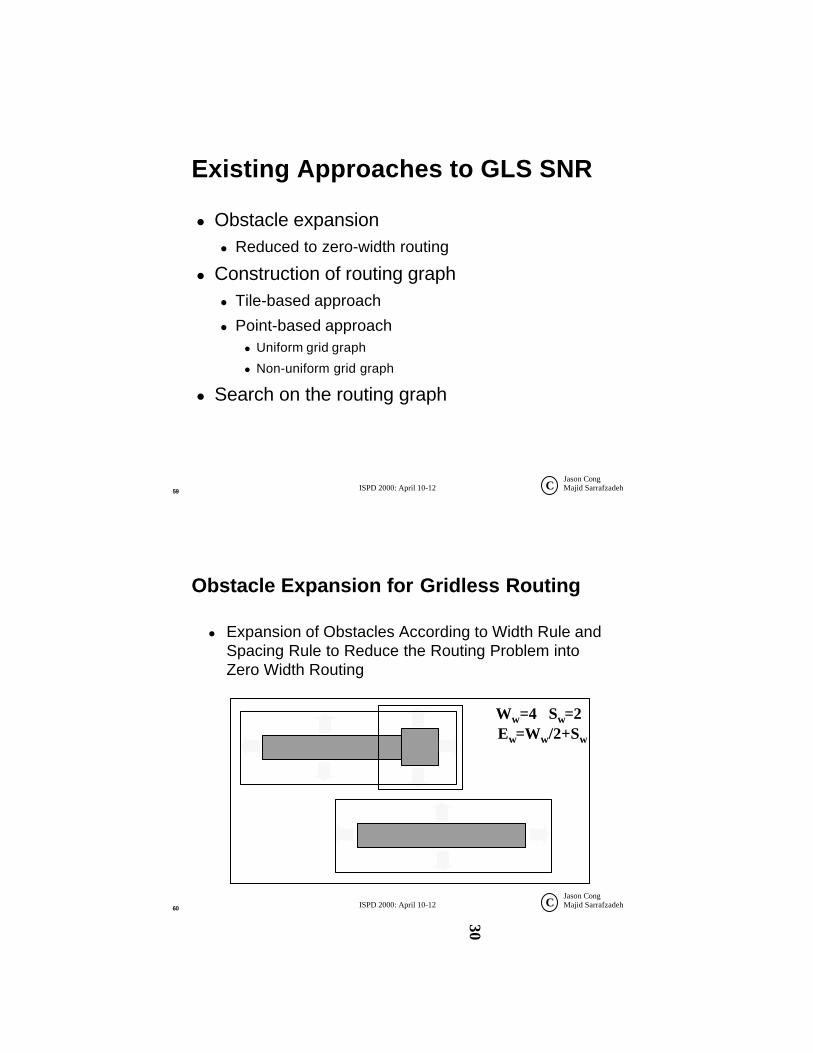
Existing Approaches to GLS SNR
l Obstacle expansionl Reduced to zero-width routing
l Construction of routing graphl Tile-based approach
l Point-based approachl Uniform grid graph
l Non-uniform grid graph
l Search on the routing graph
60
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Obstacle Expansion for Gridless Routing
l Expansion of Obstacles According to Width Rule andSpacing Rule to Reduce the Routing Problem intoZero Width Routing
Ww=4 Sw=2Ew=Ww/2+Sw
31
61
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
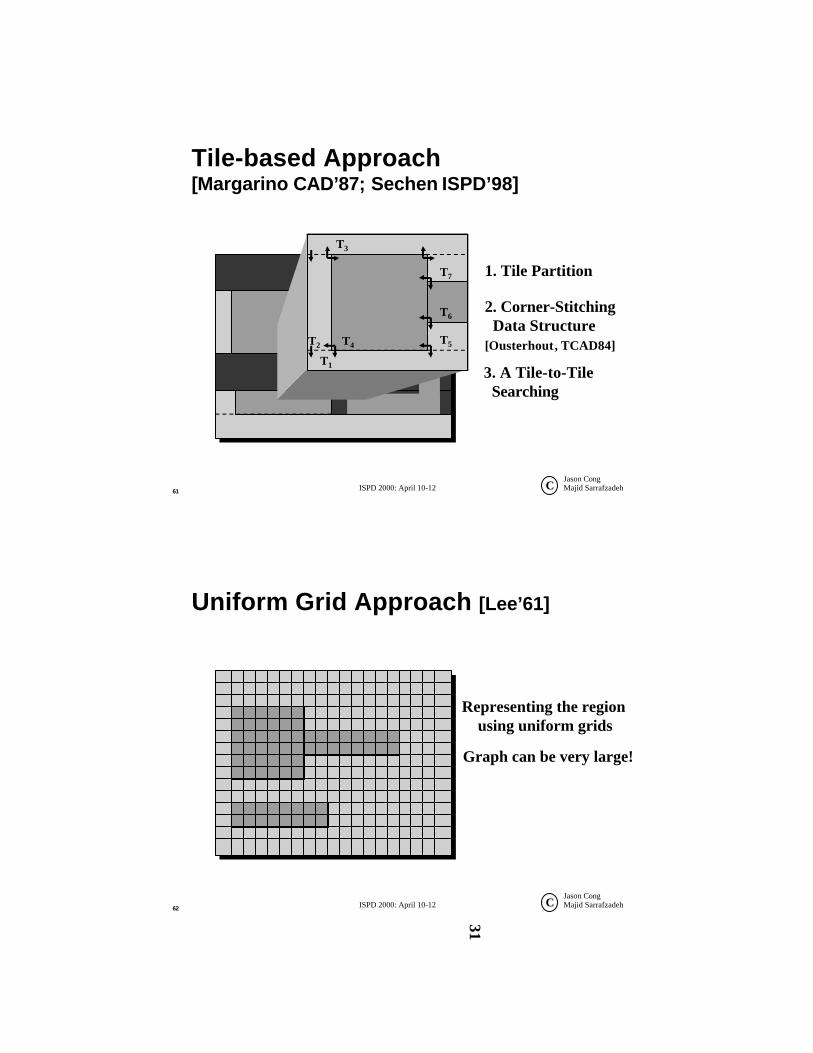
Tile-based Approach[Margarino CAD’87; Sechen ISPD’98]
1. Tile Partition
2. Corner-Stitching Data Structure [Ousterhout, TCAD84]
3. A Tile-to-Tile Searching
s
t
T1
T2 T4
T3
T7
T5
T6
62
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Uniform Grid Approach [Lee’61]
Representing the region using uniform grids
Graph can be very large!
32
63
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
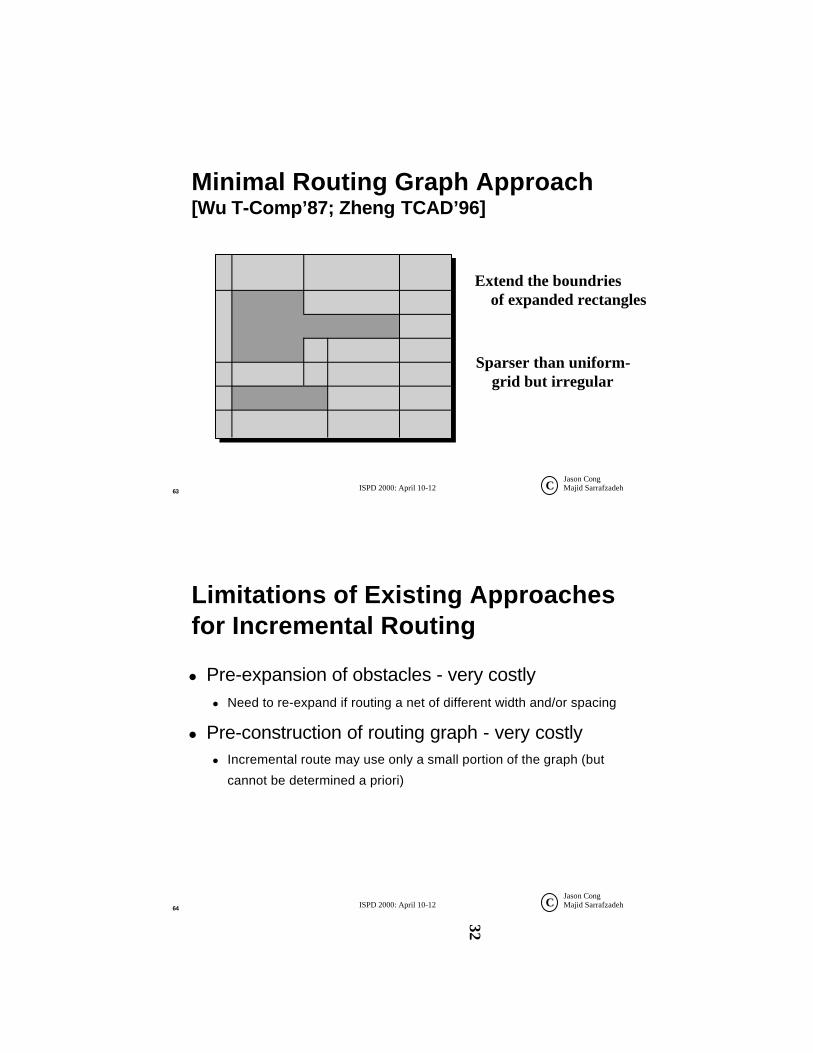
Minimal Routing Graph Approach[Wu T-Comp’87; Zheng TCAD’96]
Extend the boundries of expanded rectangles
Sparser than uniform- grid but irregular
64
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Limitations of Existing Approachesfor Incremental Routing
l Pre-expansion of obstacles - very costlyl Need to re-expand if routing a net of different width and/or spacing
l Pre-construction of routing graph - very costlyl Incremental route may use only a small portion of the graph (but
cannot be determined a priori)
33
65
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
S
T
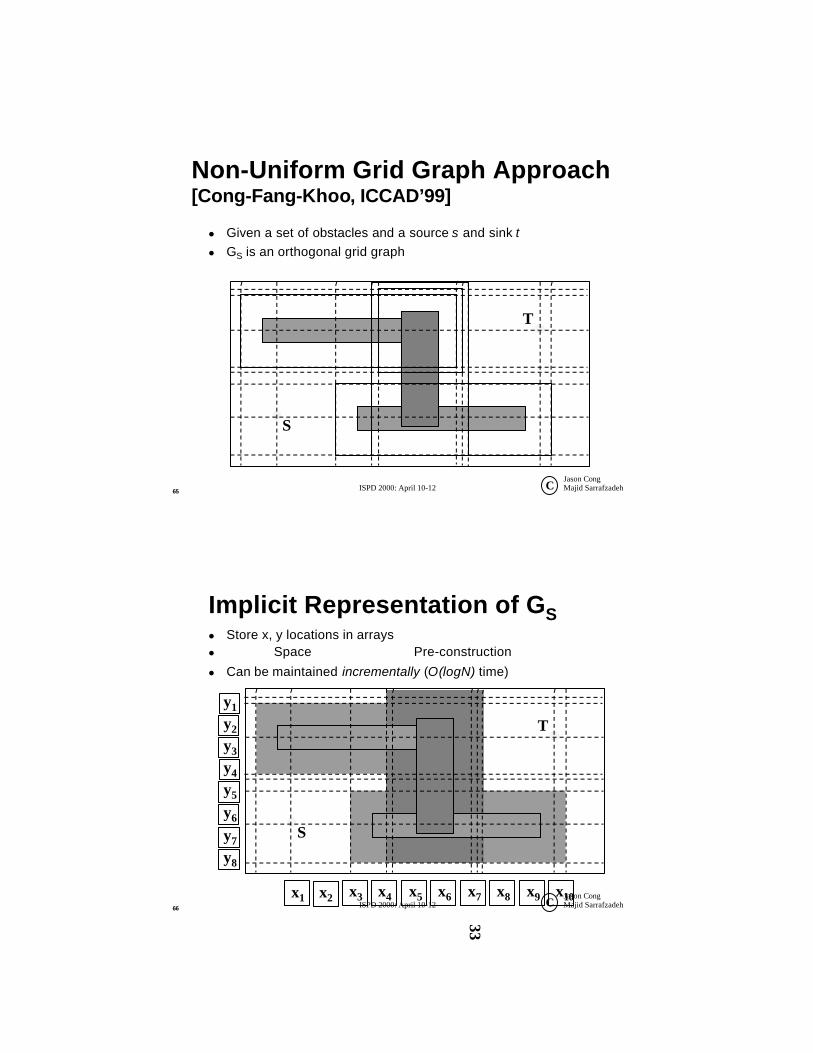
Non-Uniform Grid Graph Approach[Cong-Fang-Khoo, ICCAD’99]
l Given a set of obstacles and a source s and sink tl GS is an orthogonal grid graph
66
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
S
T
Implicit Representation of GS
y1
y2
y3
y4
y5
y6
y7
y8
x1 x3 x4x2 x5 x6 x7 x8 x9 x10
l Store x, y locations in arraysl Space Pre-construction
l Can be maintained incrementally (O(logN) time)
)(NO )log( NNO
34
67
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
S
T
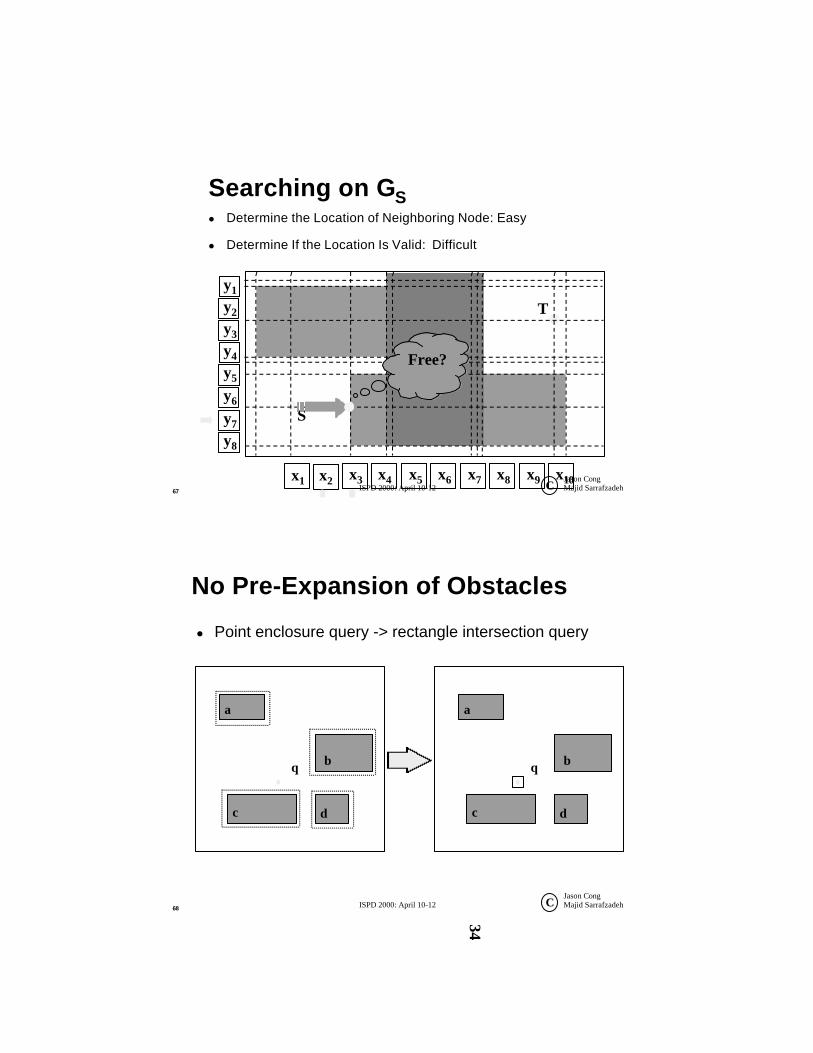
Searching on GS
y1
y2
y3
y4
y5
y6
y7
y8
x1 x3 x4x2 x5 x6 x7 x8 x9 x10
l Determine the Location of Neighboring Node: Easy
Free?
l Determine If the Location Is Valid: Difficult
68
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
No Pre-Expansion of Obstacles
l Point enclosure query -> rectangle intersection query
a
b
dc
q
a
b
dc
q
35
69
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
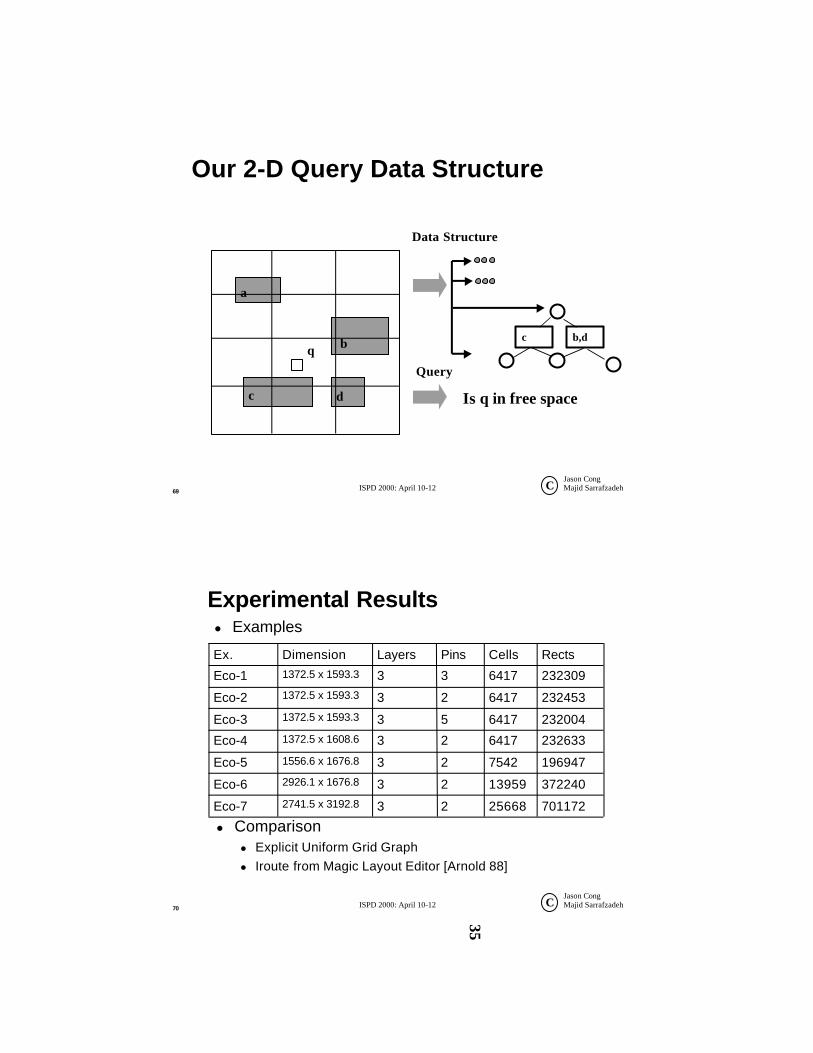
Our 2-D Query Data Structure
a
b
dc
q
Data Structure
Is q in free space
Query
c b,d
70
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Experimental Results
70117225668232741.5 x 3192.8Eco-7
37224013959232926.1 x 1676.8Eco-6
1969477542231556.6 x 1676.8Eco-5
2326336417231372.5 x 1608.6Eco-4
2320046417531372.5 x 1593.3Eco-3
2324536417231372.5 x 1593.3Eco-2
2323096417331372.5 x 1593.3Eco-1
RectsCellsPinsLayersDimensionEx.
l Examples
l Comparisonl Explicit Uniform Grid Graph
l Iroute from Magic Layout Editor [Arnold 88]
36
71
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
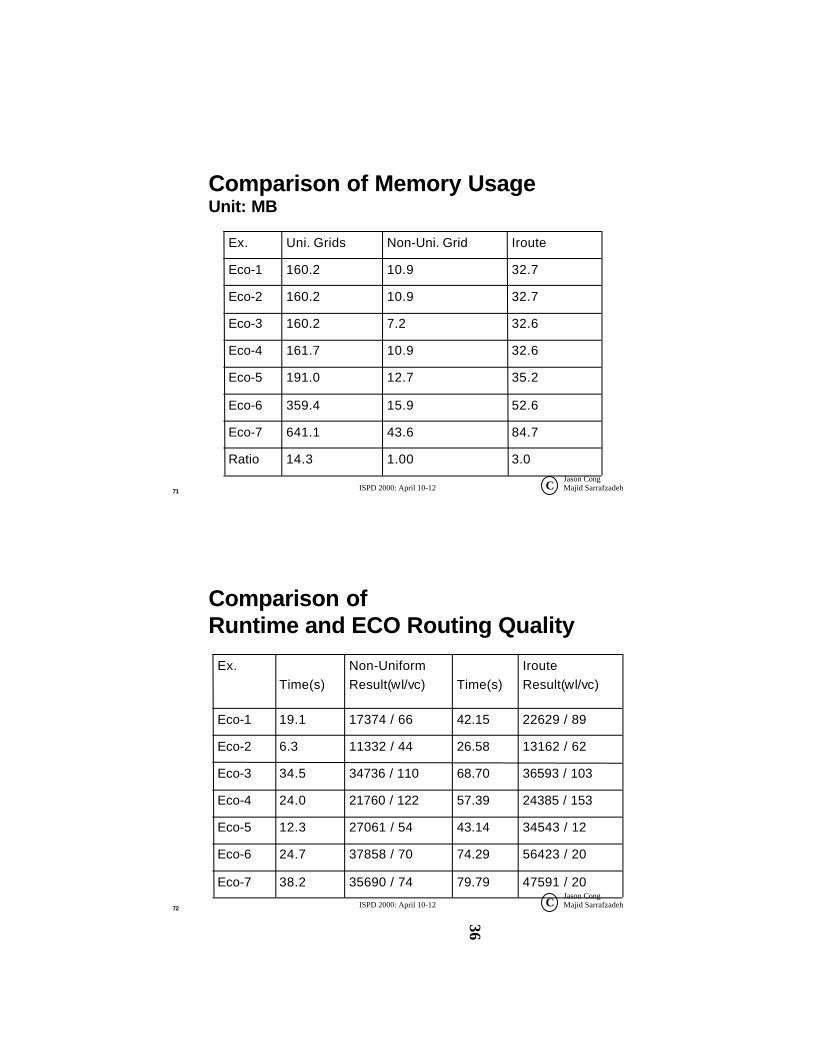
Comparison of Memory UsageUnit: MB
3.01.0014.3Ratio
84.743.6641.1Eco-7
52.615.9359.4Eco-6
35.212.7191.0Eco-5
32.610.9161.7Eco-4
32.67.2160.2Eco-3
32.710.9160.2Eco-2
32.710.9160.2Eco-1
IrouteNon-Uni. GridUni. GridsEx.
72
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Comparison ofRuntime and ECO Routing Quality
47591 / 2079.7935690 / 7438.2Eco-7
56423 / 2074.2937858 / 7024.7Eco-6
34543 / 1243.1427061 / 5412.3Eco-5
24385 / 15357.3921760 / 12224.0Eco-4
36593 / 10368.7034736 / 11034.5Eco-3
13162 / 6226.5811332 / 446.3Eco-2
22629 / 8942.1517374 / 6619.1Eco-1
Iroute
Result(wl/vc)Time(s)
Non-Uniform
Result(wl/vc)Time(s)
Ex.
37
73
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Sub-problems in IncrementalRouting
l Single Net Routing
l No change of existing routes
l Rip-up and Reroute
l Change some existing routes but no change of
placement/floorplan
l Incremental Floorplan and Placement Update
l Invoke when Rip-up & re-route fails
Increasing flexibility
Increasing runtime
74
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Rip-up and Reroute
l Invoke when net-by-net routing fails
l Objectivesl Complete all the nets
l Minimize number of rip-ups
l Challengesl Gridless nature of routing problem makes routing resource
difficult to model and manage
38
75
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
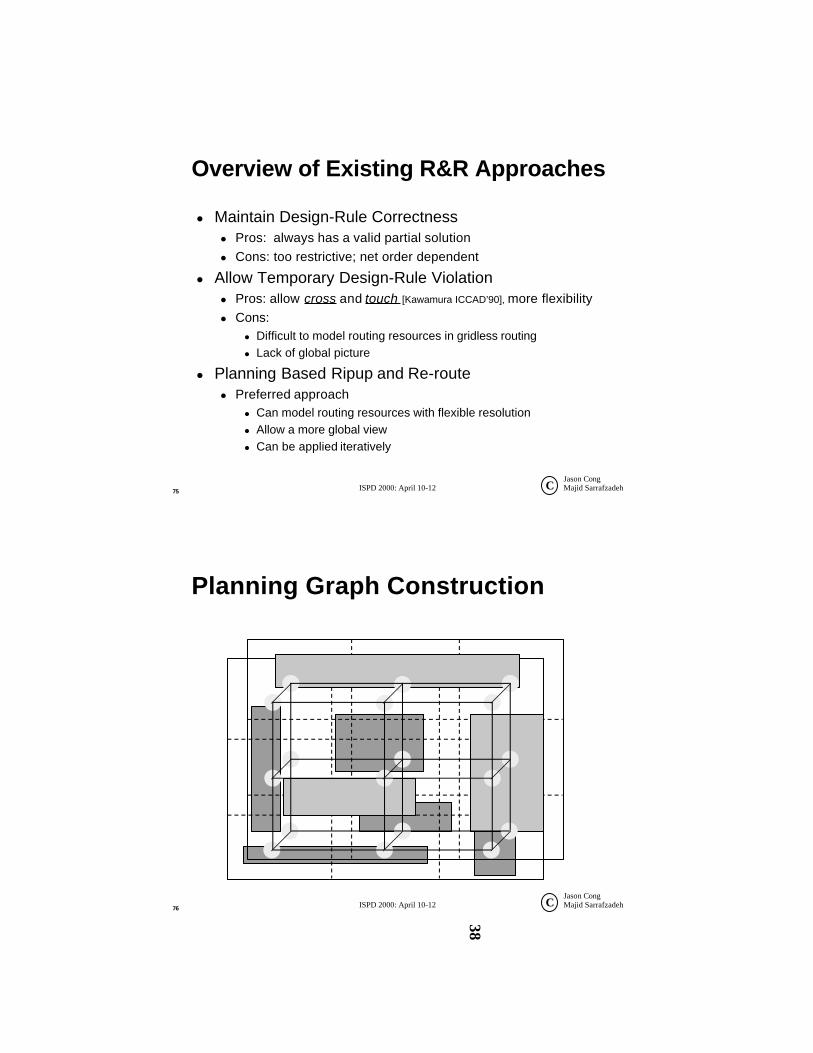
Overview of Existing R&R Approaches
l Maintain Design-Rule Correctnessl Pros: always has a valid partial solution
l Cons: too restrictive; net order dependent
l Allow Temporary Design-Rule Violationl Pros: allow cross and touch [Kawamura ICCAD’90], more flexibility
l Cons:l Difficult to model routing resources in gridless routing
l Lack of global picture
l Planning Based Ripup and Re-routel Preferred approach
l Can model routing resources with flexible resolution
l Allow a more global view
l Can be applied iteratively
76
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Planning Graph Construction
39
77
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
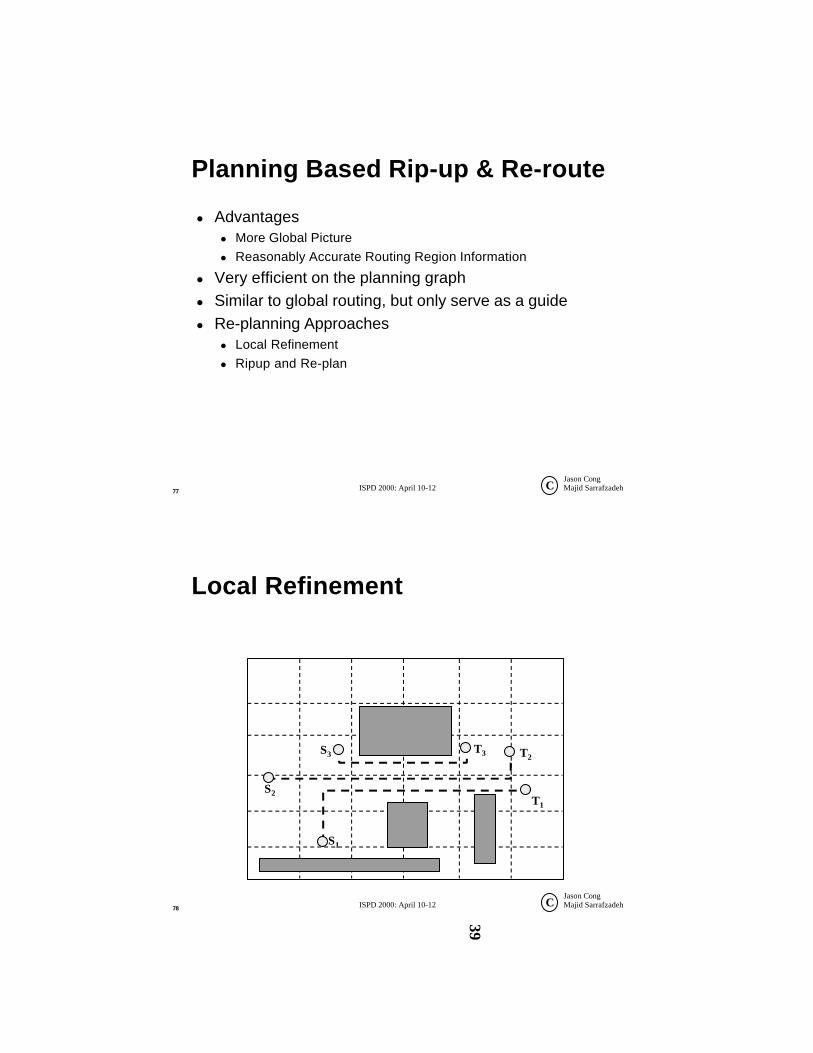
Planning Based Rip-up & Re-route
l Advantagesl More Global Picture
l Reasonably Accurate Routing Region Information
l Very efficient on the planning graph
l Similar to global routing, but only serve as a guide
l Re-planning Approachesl Local Refinement
l Ripup and Re-plan
78
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Local Refinement
S1
S2
S3
T1
T2T3
40
79
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
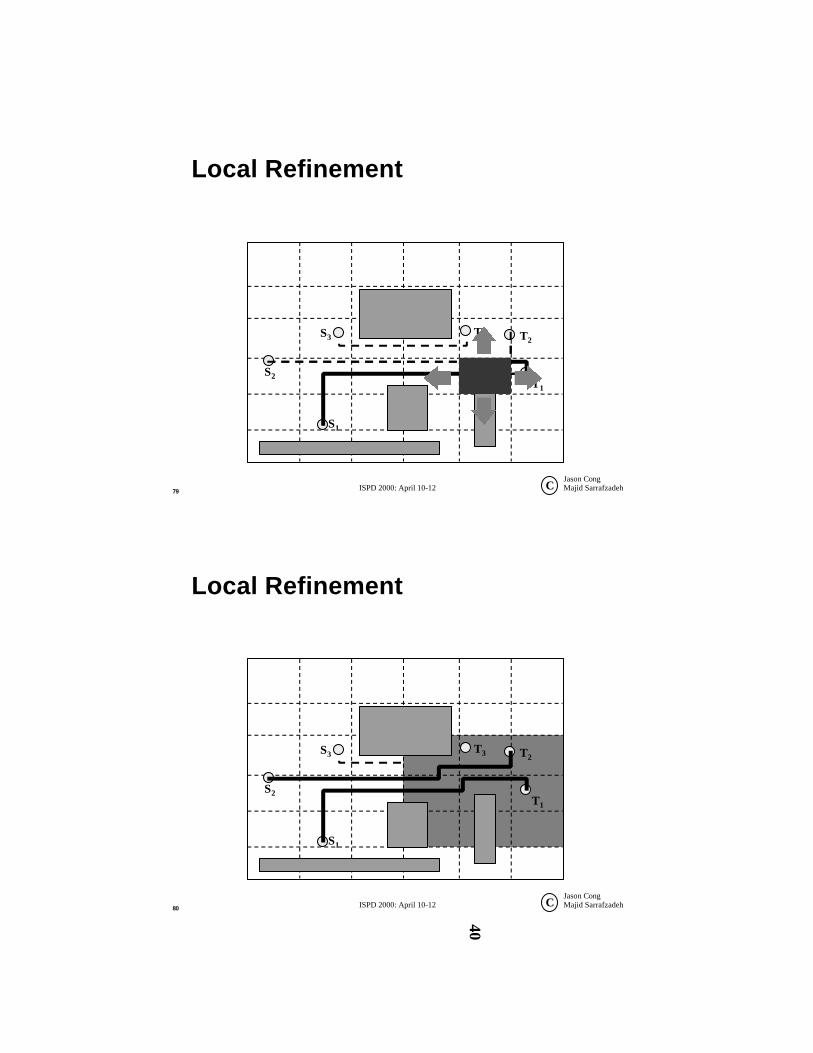
Local Refinement
S1
S2
S3
T1
T2T3
80
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Local Refinement
S1
S2
S3
T1
T2T3
41
81
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
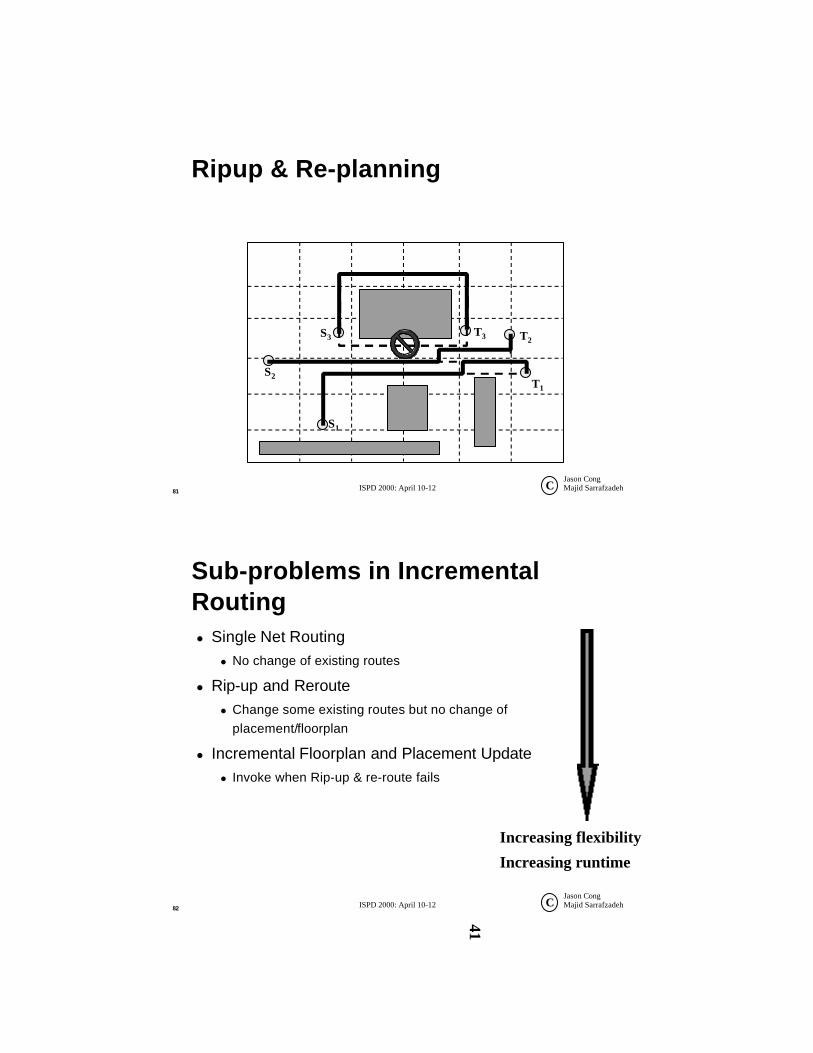
Ripup & Re-planning
S1
S2
S3
T1
T2T3
82
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Sub-problems in IncrementalRouting
l Single Net Routing
l No change of existing routes
l Rip-up and Reroute
l Change some existing routes but no change of
placement/floorplan
l Incremental Floorplan and Placement Update
l Invoke when Rip-up & re-route fails
Increasing flexibility
Increasing runtime
42
83
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Incremental Floorplan andPlacement Updatel Problem Formulation
l When rip-up and re-route fails, determine how to complete thedesign with minimum changes of the floorplan and/or placement
l Need efficient heuristics to decide what routing regionsto enlarge
l May apply compaction/de-compaction techniques
l Earlier discussions on incremental floorplan andplacement also apply
84
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Conclusions
l Design iteration is unavoidable
l Incremental PD is an important enabling technology to
allow design convergence
l Trade-off of efficiency, preservability, and design quality
is the key issue in incremental designs
l Much work is needed in this area
l Need to start thinking about “Design for Incremental
Changes” (DFI)
43
85
Jason CongMajid SarrafzadehISPD 2000: April 10-12 C
Acknowledgements
l NSF, DARPA, and Fujitsu Laboratories
l Jie Fang and Kei-Yong Khoo from UCLA
l Kiarash Barzagan, Maogang Wang, and Xiaojian Yang
from Northwestern Univ.
















![FPGA Design Automation: A Survey - VAST labcadlab.cs.ucla.edu/~cong/papers/FPGA_DA.pdf · survey/tutorial papers (e.g., [28, 52]) in this area are 10–15 years old, ... As the FPGA](https://img.pdfslide.us/doc/110x75/5a78e9da7f8b9a70648ed159/fpga-design-automation-a-survey-vast-congpapersfpgadapdfsurveytutorial-papers.jpg)