Embed Size (px)
Citation preview

www.iap.uni-jena.de
Imaging and Aberration Theory
Lecture 1: Paraxial imaging
2013-10-24
Herbert Gross
Winter term 2013

Time: Thursday, 14.00 – 15.30
Location: Abbeanum, HS 2, Fröbelstieg 1
Web page on IAP homepage under ‚learning/materials‘ provides
slides, exercises, solutions, informations
Seminar: Exercises and solutions of given problems
time: Friday, 14.00 -15.30
Bespr.Raum 102 Abbeanum
starting date: 2012-10-25
Shift of some dates could be possible
Written examination, 90‘
2
Overview

[1] H. Buchdahl, An Introduction to Hamiltonian Optics, Dover, 1970
[2] A. E. Conrady, Applied Optics and Optical Design, Part one and two, Dover, 1985
[3] H. Buchdahl, Optical Aberration Coefficients, Dover 1968
[4] Y. Matsui / K. Nariai, Fundamentals of practical aberration theory, World Scientific, 1993
[5] A. Walther, The ray and wave theory of lenses, Cambridge University Press, 1995
[6] V. Lakshminarayanan / A. Ghatak / K. Thyagarayan, Lagrangian optics, Kluwer 2002
[7] M. Berek, Grundlagen der praktischen Optik, de Gruyter, 1970
[8] W. T. Welford, Aberrations of optical systems, Adam Hilger, 1986
[9] K. Luneburg, Mathematical theory of optics, University of California Press, 1964
[10] H. Römer, Theoretical optics, Wiley VCH, 2005
[11] J. Palmer, Lens aberration data, Adam Hilger, 1971
[12] G. Slyusarev, Aberration and optical design theory, Adam Hilger, 1984
[13] D. Malacara / Z. Malacara, Handbook of optical design, Marcel Dekker, 2004
[14] A. Cox, A system of optical design, The Focal Press, 1967
[15] V. Mahajan, Optical imaging and aberrations I, Ray geometrical optics, SPIE Press,
1998
[16] V. Mahajan, Optical imaging and aberrations II, Wavew diffraction optics, SPIE Press,
2001
[17] J. Sasian, Aberrations in optical imaging systems, Cambridge University Press, 2013
3
Literature

4
Preliminary time schedule
1 24.10. Paraxial imaging paraxial optics, fundamental laws of geometrical imaging, compound systems
2 07.11. Pupils, Fourier optics, Hamiltonian coordinates
pupil definition, basic Fourier relationship, phase space, analogy optics and mechanics, Hamiltonian coordinates
3 14.11. Eikonal Fermat Principle, stationary phase, Eikonals, relation rays-waves, geometrical approximation, inhomogeneous media
4 21.11. Aberration expansion single surface, general Taylor expansion, representations, various orders, stop shift formulas
5 28.11. Representations of aberrations different types of representations, fields of application, limitations and pitfalls, measurement of aberrations
6 05.12. Spherical aberration phenomenology, sph-free surfaces, skew spherical, correction of sph, aspherical surfaces, higher orders
7 12.12. Distortion and coma phenomenology, relation to sine condition, aplanatic sytems, effect of stop position, various topics, correction options
8 19.12. Astigmatism and curvature phenomenology, Coddington equations, Petzval law, correction options
9 09.01. Chromatical aberrations
Dispersion, axial chromatical aberration, transverse chromatical aberration, spherochromatism, secondary spoectrum
10 16.01. Further reading on aberrations sensitivity in 3rd order, structure of a system, analysis of optical systems, lens contributions, Sine condition, isoplanatism, sine condition, Herschel condition, relation to coma and shift invariance, pupil aberrations, relation to Fourier optics
11 23.01. Wave aberrations definition, various expansion forms, propagation of wave aberrations, relation to PSF and OTF
12 30.01. Zernike polynomials special expansion for circular symmetry, problems, calculation, optimal balancing, influence of normalization, recalculation for offset, ellipticity, measurement
13 06.02. Miscellaneous Intrinsic and induced aberrations, Aldi theorem, vectorial aberrations, partial symmetric systems

1. Cardinal elements
2. Lens properties
3. Imaging, magnification
4. Afocal systems and telecentricity
5. Paraxial approximation
6. Matrix calculus
5
Contents 1st Lecture

Modelling of Optical Systems
Principal purpose of calculations:
System, data of the structure(radii, distances, indices,...)
Function, data of properties,
quality performance(spot diameter, MTF, Strehl ratio,...)
Analysisimaging
aberration
theorie
Synthesislens design
Ref: W. Richter
Imaging model with levels of refinement
Analytical approximation and classification
(aberrations,..)
Paraxial model
(focal length, magnification, aperture,..)
Geometrical optics
(transverse aberrations, wave aberration,
distortion,...)
Wave optics
(point spread function, OTF,...)
with
diffractionapproximation
--> 0
Taylor
expansion
linear
approximation

Single surface between two media
Radius r, refractive indices n, n‘
Imaging condition, paraxial
Abbe invariant
alternative representation of the
imaging equation
'
1'
'
'
fr
nn
s
n
s
n
y
n'ny'
r
C
ray through center of curvature C principal
plane
vertex S
s
s'
object
surface
image
arbitrary ray
'
11'
11
srn
srnQs
Single Surface

Focal points:
1. incoming parallel ray
intersects the axis in F‘
2. ray through F is leaves the lens
parallel to the axis
Principal plane P:
location of apparent ray bending
y
f '
u'P' F'
sBFL
sP'
principal
plane
focal plane
nodal planes
N N'
u
u'
Nodal points:
Ray through N goes through N‘
and preserves the direction
Cardinal elements of a lens

P principal point
S vertex of the surface
F focal point
s intersection point
of a ray with axis
f focal length PF
r radius of surface
curvature
d thickness SS‘
n refrative index
O
O'
y'
y
F F'
S
S'
P P'
N N'
n n n1 2
f'
a'
f'BFL
fBFL
a
f
s's
d
sP
s'P'
u'u
Notations of a lens

Main notations and properties of a lens:
- radii of curvature r1 , r2
curvatures c
sign: r > 0 : center of curvature
is located on the right side
- thickness d along the axis
- diameter D
- index of refraction of lens material n
Focal length (paraxial)
Optical power
Back focal length
intersection length,
measured from the vertex point
2
2
1
1
11
rc
rc
'tan',
tan
'
u
yf
u
yf F
'
'
f
n
f
nF
'' ' PF sfs
Main properties of a lens

Different shapes of singlet lenses:
1. bi-, symmetric
2. plane convex / concave, one surface plane
3. Meniscus, both surface radii with the same sign
Convex: bending outside
Concave: hollow surface
Principal planes P, P‘: outside for mesicus shaped lenses
P'P
bi-convex lens
P'P
plane-convex lens
P'P
positive
meniscus lens
P P'
bi-concave lens
P'P
plane-concave
lens
P P'
negative
meniscus lens
Lens shape

Ray path at a lens of constant focal length and different bending
The ray angle inside the lens changes
The ray incidence angles at the surfaces changes strongly
The principal planes move
For invariant location of P, P‘ the position of the lens moves
P P'
F'
X = -4 X = -2 X = +2X = 0 X = +4
Lens bending und shift of principal plane

Magnification parameter M:
defines ray path through the lens
Special cases:
1. M = 0 : symmetrical 4f-imaging setup
2. M = -1: object in front focal plane
3. M = +1: object in infinity
The parameter M strongly influences the aberrations
1'
21
2
1
1
'
'
s
f
s
f
m
m
UU
UUM
Magnification Parameter
M=0
M=-1
M<-1
M=+1
M>+1

Optical Image formation:
All ray emerging from one object point meet in the perfect image point
Region near axis:
gaussian imaging
ideal, paraxial
Image field size:
Chief ray
Aperture/size of
light cone:
marginal ray
defined by pupil
stop
image
object
optical
system
O2field
point
axis
pupil
stop
marginal
ray
O1 O'1
O'2
chief
ray
Optical imaging

Single surface
imaging equation
Thin lens in air
focal length
Thin lens in air with one plane
surface, focal length
Thin symmetrical bi-lens
Thick lens in air
focal length
'
1'
'
'
fr
nn
s
n
s
n
21
111
'
1
rrn
f
1'
n
rf
12'
n
rf
21
2
21
1111
'
1
rrn
dn
rrn
f
Formulas for surface and lens imaging

Imaging by a lens in air:
lens makers formula
Magnification
Real imaging:
s < 0 , s' > 0
Intersection lengths s, s'
measured with respective to the
principal planes P, P'
fss
11
'
1
s'
2f'
4f'
2f' 4f'
s-2f'- 4f'
-2f'
- 4f'
real object
real image
real object
virtual object
virtual image
virtual object
real image
virtual image
Imaging equation
s
sm
'

Ranges of imaging
Location of the image for a single
lens system
Change of object loaction
Image could be:
1. real / virtual
2. enlarged/reduced
3. in finite/infinite distance
Imaging by a Lens
|s| < f'
image virtual
magnified FObjekt
s
F object
s
Fobject
s
F
object
s
F'
F
object
image
s
|s| = f'
2f' > |s| > f'
|s| = 2f'
|s| > 2f'
F'
F'
F'
F'
image
image
image
image
image at
infinity
image real
magnified
image real
1 : 1
image real
reduced

Imaging equation according to Newton:
distances z, z' measured relative to the
focal points
'' ffzz
Newton Formula
-z -f f' z'
y
P P'
principal planes
image
focal
point F'focal
point F
-s s'
object

Two lenses with distance d
Focal length
distance of inner focal points e
Sequence of thin lenses close
together
Sequence of surfaces with relative
ray heights hj, paraxial
Magnification
n
FFdFFF 21
21
e
ff
dff
fff 21
21
21
k
kFF
k k
kkk
rnn
h
hF
1'
1
kk
k
n
n
s
s
s
s
s
sm
'
''' 1
2
2
1
1
Multi-Surface Systems

Focal length
e: tube length
Image location
Two-Lens System
lens 1
lens 2
d
e
f'1
f2
s'
s
e
ff
dff
fff 21
21
21 ''
''
'''
1
1
21
212
'
')'(
''
')'('
f
fdf
dff
fdfs

Lateral magnification for finite imaging
Scaling of image size
'tan'
tan'
uf
uf
y
ym
z f f' z'
y
P P'
principal planes
object
imagefocal pointfocal point
s
s'
y'
F F'
Magnification

Afocal systems with object/image in infinity
Definition with field angle w
angular magnification
Relation with finite-distance magnification
''tan
'tan
hn
nh
w
w
'f
fm
Angle Magnification
h
h'w'
w

Axial magnification
Approximation for small z and n = n‘
f
zmf
fm
z
z
1
1'' 2
'tan
tan2
22
u
um
Axial Magnification
z z'

Imaging on axis: circular / rotational symmetry
Only spherical aberration and chromatical aberrations
Finite field size, object point off-axis:
- chief ray as reference
- skew ray bundels:
coma and distortion
- Vignetting, cone of ray bundle
not circular symmetric
- to distinguish:
tangential and sagittal
plane
O
entrance
pupil
y yp
chief ray
exit
pupil
y' y'p
O'
w'
w
R'AP
u
chief ray
object
planeimage
plane
marginal/rim
ray
u'
Definition of Field of View and Aperture

The Special Infinity Cases
Simple case:
- object, image and pupils are lying in a finite
distance
- non-telecentric relay systems
Special case 1:
- object at infinity
- object sided afocal
- example: camera lens for distant objects
Special case 2:
- image at infinity
- image sided afocal
- example: eyepiece
Special case 3:
- entrance pupil at infinity
- object sides telecentric
- example: camera lens for metrology
Special case 4:
- exit pupil at infinity
- image sided telecentric
- example: old fashion lithographic lens

The Special Infinity Cases
Very special: combination of above cases
Examples:
- both sided telecentric: 4f-system, lithographic lens
- both sided afocal: afocal zoom
- object sided telecentric, image sided afocal:
microscopic lens
Notice: telecentricity and afocality can not be combined on the same side of a system

Special stop positions:
1. stop in back focal plane: object sided telecentricity
2. stop in front focal plane: image sided telecentricity
3. stop in intermediate focal plane: both-sided telecentricity
Telecentricity:
1. pupil in infinity
2. chief ray parallel to the optical axis
Telecentricity
telecentric
stopobject imageobject sides chief rays
parallel to the optical axis
27

Double telecentric system: stop in intermediate focus
Realization in lithographic projection systems
Telecentricity
telecentric
stopobject imagelens f1 lens f2
f1
f1
f2
f2
28

Paraxiality is given for small angles
relative to the optical axis for all rays
Large numerical aperture angle u
violates the paraxiality,
spherical aberration occurs
Large field angles w violates the
paraxiality,
coma, astigmatism, distortion, field
curvature occurs
Paraxial Approximation

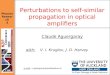
Field-Aperture-Diagram
0.20 0.4 0.6 0.80°
4°
8°
12°
16°
20°
24°
28°
32°
36°
NA
w
40°
micro
100x0.9
double
Gauss
achromat
Triplet
micro
40x0.6micro
10x0.4
Sonnar
Biogon
split
triplet
Distagon
disc
projection
Gauss
diode
collimator
projection
Petzval
micros-
copy
collimator
focussing
photographic
projection constant
etendue
lithography
Braat 1987
lithography
2003
Classification of systems with
field and aperture size
Scheme is related to size,
correction goals and etendue
of the systems
Aperture dominated:
Disk lenses, microscopy,
Collimator
Field dominated:
Projection lenses,
camera lenses,
Photographic lenses
Spectral widthz as a correction
requirement is missed in this chart

Microscopic Objective Lens
Incidence angles for chief and
marginal ray
Aperture dominant system
Primary problem is to correct
spherical aberration
marginal ray
chief ray
incidence angle
0 5 10 15 20 2560
40
20
0
20
40
60
microscope objective lens
31

Photographic lens
Incidence angles for chief and
marginal ray
Field dominant system
Primary goal is to control and correct
field related aberrations:
coma, astigmatism, field curvature,
lateral color
incidence angle
chief
ray
Photographic lens
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1560
40
20
0
20
40
60
marginal
ray
32

Paraxial approximation:
Small angles of rays at every surface
Small incidence angles allows for a linearization of the law of refraction
All optical imaging conditions become linear (Gaussian optics),
calculation with ABCD matrix calculus is possible
No aberrations occur in optical systems
There are no truncation effects due to transverse finite sized components
Serves as a reference for ideal system conditions
Is the fundament for many system properties (focal length, principal plane, magnification,...)
The sag of optical surfaces (difference in z between vertex plane and real surface
intersection point) can be neglected
All waves are plane of spherical (parabolic)
The phase factor of spherical waves is quadratic
Paraxial approximation
'' inin
R
xi
eExE
2
0)(

Law of refraction for finite angles I, I‘
Taylor expansion
Linear formulation of the law of refraction
for small angles i, i‘
Relative direction error of the paraxial
approximation
Paraxial approximation
i0 5 10 15 20 25 30 35 40
0
0.01
0.02
0.03
0.04
0.05
i'- I') / I'
n' = 1.9
n' = 1.7
n' = 1.5
...!5!3
sin53
xx
xx
'sin'sin InIn
1
'
sinarcsin
'
'
''
n
inn
in
I
Ii
'' inin

Linear Collineation
General transform object - image space
General rational transformation
with linear expression
Describes linear collinear transform x,y,z ---> x',y',z'
Inversion
Analog in the image space
Inserted in only 2 dimensions
Focal lengths
from conditions Fo = 0 and Fo‘=0
Principal planes
0
3
0
2
0
1 ',','F
Fz
F
Fy
F
Fx
3,2,1,0, jdzcybxaF jjjjj
0
3
0
2
0
1
'
',
'
',
'
'
F
Fz
F
Fy
F
Fx
3,2,1,0,'''''''' jdzcybxaF jjjjj
0
2
0
33 ','dzc
yby
dzc
dzcz
oo
01
0303
0
2 ',ca
cddcf
c
bf
01
030313'
0
01 ,ca
cddcacz
c
daz PP
),,(',),,(',),,(' zyxFzzyxFyzyxFx

Linear Collineation
Finite angles: tan(u) must be taken:
Magnification:
Focal length:
Invariant:
O
O'
y'
y
F F'
P P'
N N'
f'
a'a
f
z'z
u'u
h
u
um
tan
'tan
h
uu
f
tan'tan
'
1
'tan''tan uynuny

The notation ‚ideal‘ imaging is not unique
Ideal is in any case the location of the image point
The geometrical ray paths can be different for
1. paraxial
2. ideal / linear collineation
3. aplanatic
The photometric properties are different
due to non-equidistant sampling
If a perfect lens is idealized in a software
as one surface, there are principal
discrepances in the location of the
intersection points
37
What is ‚Ideal‘ ?
optical
axis
ideal
vertex
plane
ellipsoidal
mirror
object
pointimage
pointideal
system
paraxial
system
aperture
angles

Ideal lens
- one principal plane
Aplanatic lens
- principal surfaces are spheres
- the marginal ray heights in the vortex plane are different for larger angles
- inconsistencies in the layout drawings
Ideal lens
P P'
P = P'

Matrix Calculus
Paraxial raytrace transfer
Matrix formulation
Matrix formalism for finite angles
Paraxial raytrace refraction
Inserted
Matrix formulation
111 jjjj Udyy
1 jjjj Uyi in
nij
j
j
j''
1' jj UU
1 jj yy
1
'
''
j
j
j
j
j
jjj
j Un
ny
n
nnU
'' 1 jjjj iiUU
j
jj
j
j
U
yd
U
y
10
1
'
'1
j
j
j
j
j
jjj
j
j
U
y
n
n
n
nnU
y
'
'01
'
'
j
j
j
j
u
y
DC
BA
u
y
tan'tan
'

Linear relation of ray transport
Simple case: free space
propagation
Advantages of matrix calculus:
1. simple calculation of component
combinations
2. Automatic correct signs of
properties
3. Easy to implement
General case:
paraxial segment with matrix
ABCD-matrix :
u
xM
u
x
DC
BA
u
x
'
'
z
x x'
ray
x'
u'
u
x
B
Matrix Formulation of Paraxial Optics
A B
C D
z
x x'
ray x'
u'u
x

Linear transfer of spation coordinate x
and angle u
Matrix representation
Lateral magnification for u=0
Angle magnification of conjugated planes
Refractive power for u=0
Composition of systems
Determinant, only 3 variables
uDxCu
uBxAx
'
'
u
xM
u
x
DC
BA
u
x
'
'
xxA /'
uuD /'
xuC /'
121 ... MMMMM kk
'det
n
nCBDAM
Matrix Formulation of Paraxial Optics

System inversion
Transition over distance L
Thin lens with focal length f
Dielectric plane interface
Afocal telescope
AC
BDM
1
10
1 LM
11
01
f
M
'0
01
n
nM
0
1L
M
Matrix Formulation of Paraxial Optics

Calculation of intersection length
Magnifications:
1. lateral
2. angle
3. axial, depth
Principal planes
Focal points
Matrix Formulation of Paraxial Optics
DsC
BsAs
'
DsC
BCAD
2'
DsC
BCAD
ds
ds
'sCA
BCADDsC
C
DBCADaH
C
AaH
1'
C
AaF '
C
DaF

Decomposition of ABCD-Matrix
2x2 ABCD-matrix of a system in air: 3 arbitrary parameters
Every arbitrary ABCD-setup can be decomposed into a simple system
Decomposition in 3 elementary partitions is alway possible
Case 1: C # 0 one lens, 2 transitions
System data
MA B
C D
L
f
L
1
0 1
1 01
1
1
0 1
1 2
LD
C1
1
LA
C2
1
fC
1
Output
xo
Input
xi
Lens
f
L2
L1

Decomposition of ABCD-Matrix
Case 2: B # 0 two lenses, one transition
System data:
MA B
C D f
L
f
1 01
11
0 1
1 01
12 1
fB
A1
1
L B
fB
D2
1
OutputInput
Lens 1
f1
L
Lens 2
f2