Embed Size (px)
Citation preview
Robot ProgrammingTeam Enigma
Ariana Mirian, Computer Engineering
Jinhao Ping, Computer Science
Rossen Pomakov, Electrical Engineering
Nikki Schumaker, Computer Engineering
Lindsey Stolzenfeld, Computer Engineering
Topics• Polulu M3PI Robot
• Demonstration
• Part I: Kiva Robot Imitation• Getting started with Basic Testing• Simple Line Following• Intersections• Bluetooth Communication• Automated Intersection Detection• Dual Modes of Operation• Sharp Turns and Speed Vs. P control
• Part II: Extremum Seeking Controller• Simulation• Cosine Shaped Path• High-Pass Filter and Perturbation• Smoothing Factor
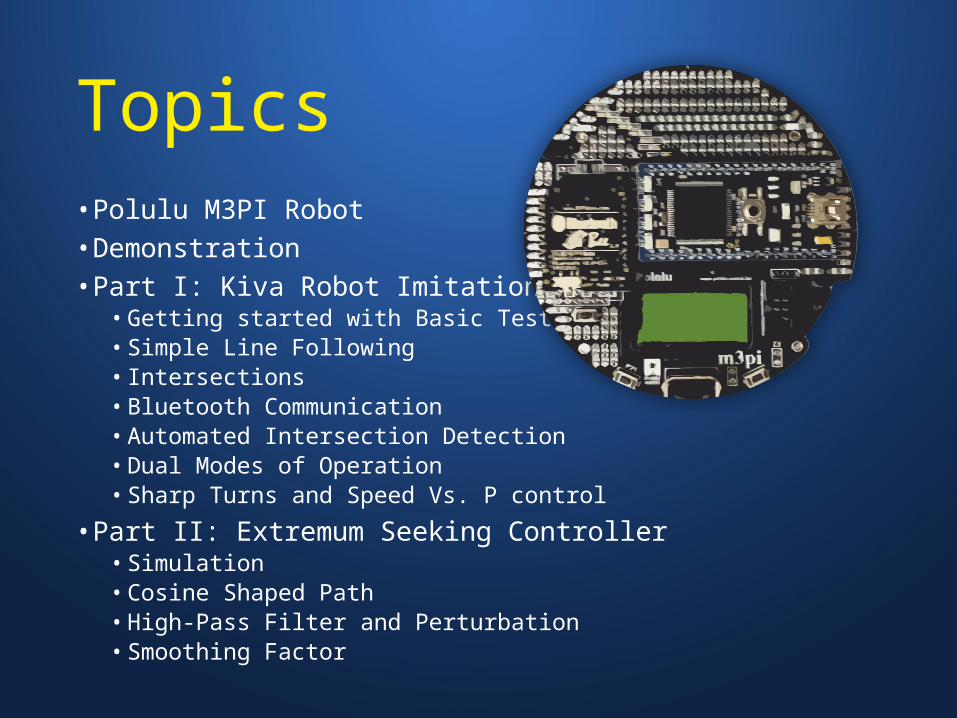
Polulu M3PI Robot
• Screen• Bluetooth Module• Light Sensors• Two Wheels
• Coded in C++
Demonstration

Kiva Robot Imitation
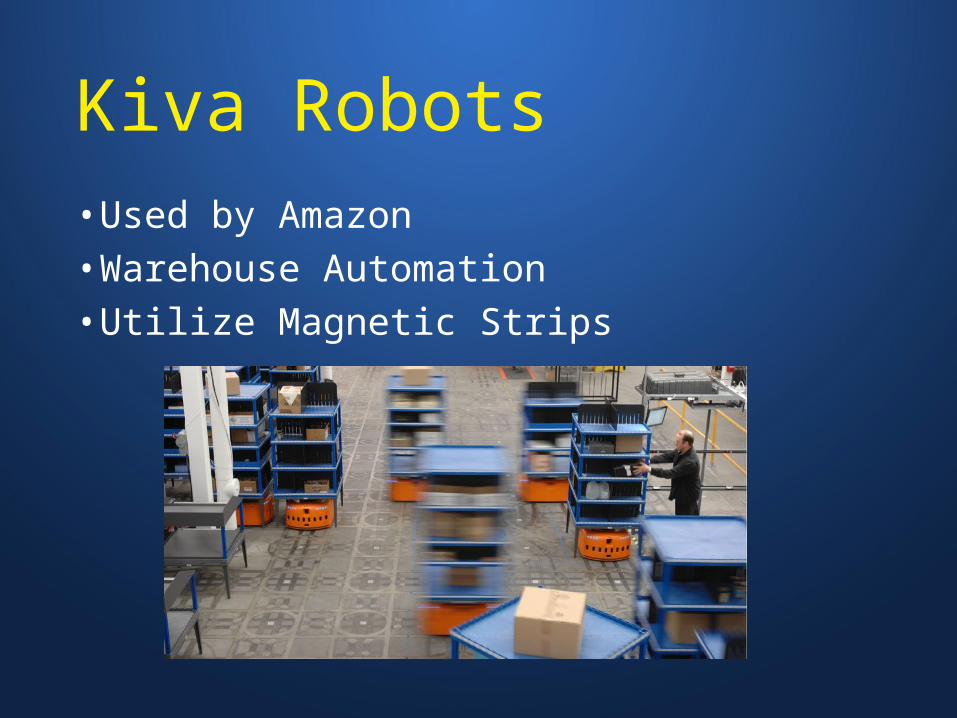
Kiva Robots• Used by Amazon
• Warehouse Automation
• Utilize Magnetic Strips
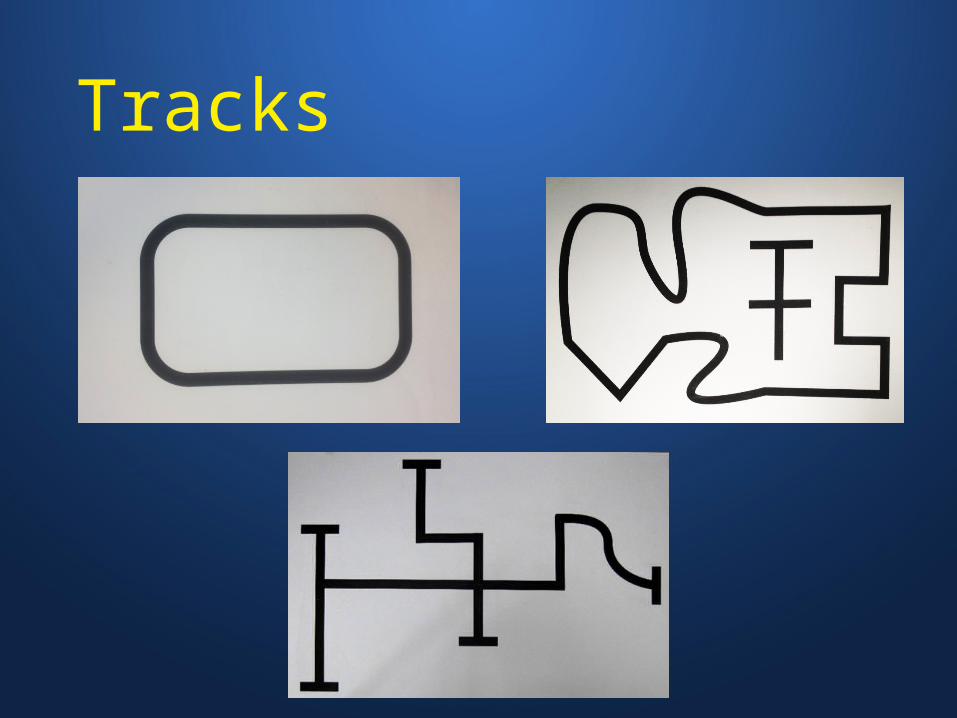
Tracks
Basic Testing• “BetaCalibrationLine”• Auto-Calibration• Black vs. White threshold is approximately 300
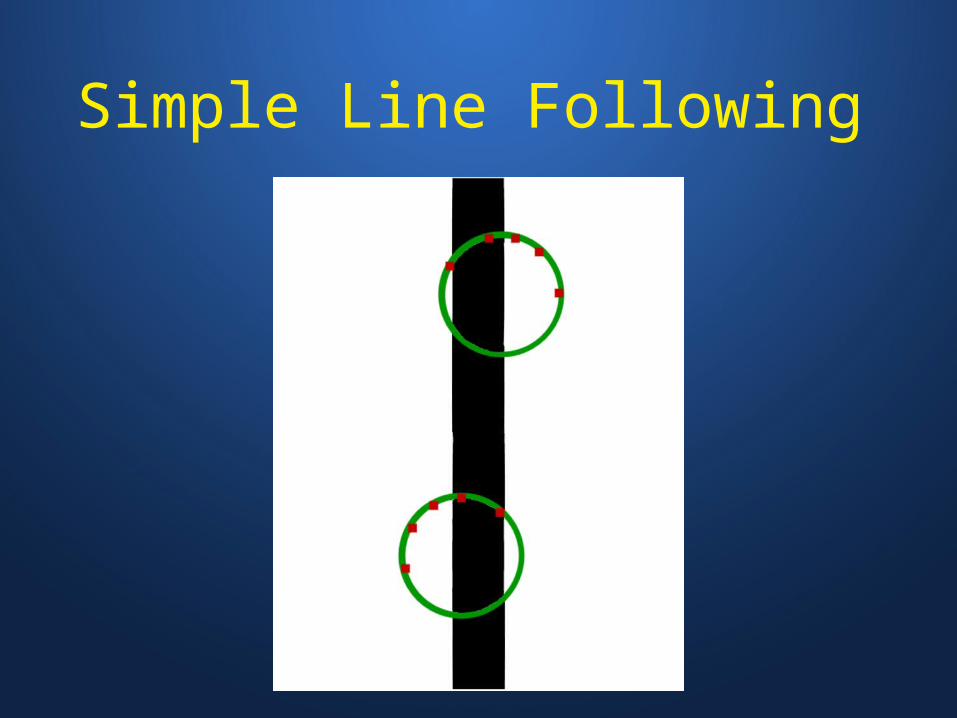
Simple Line Following
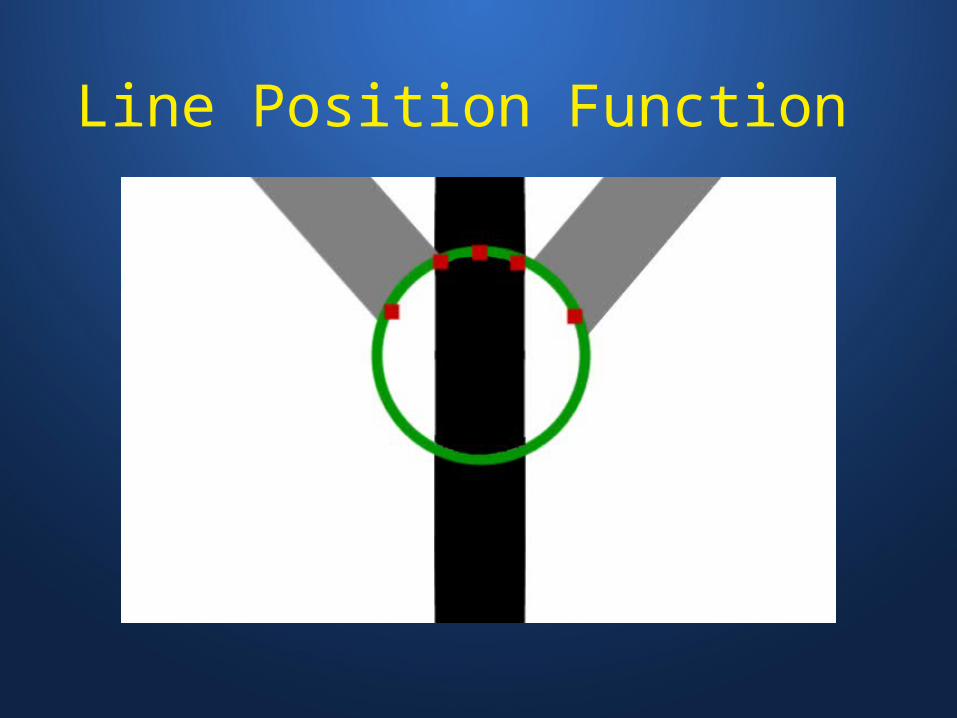
Line Position Function
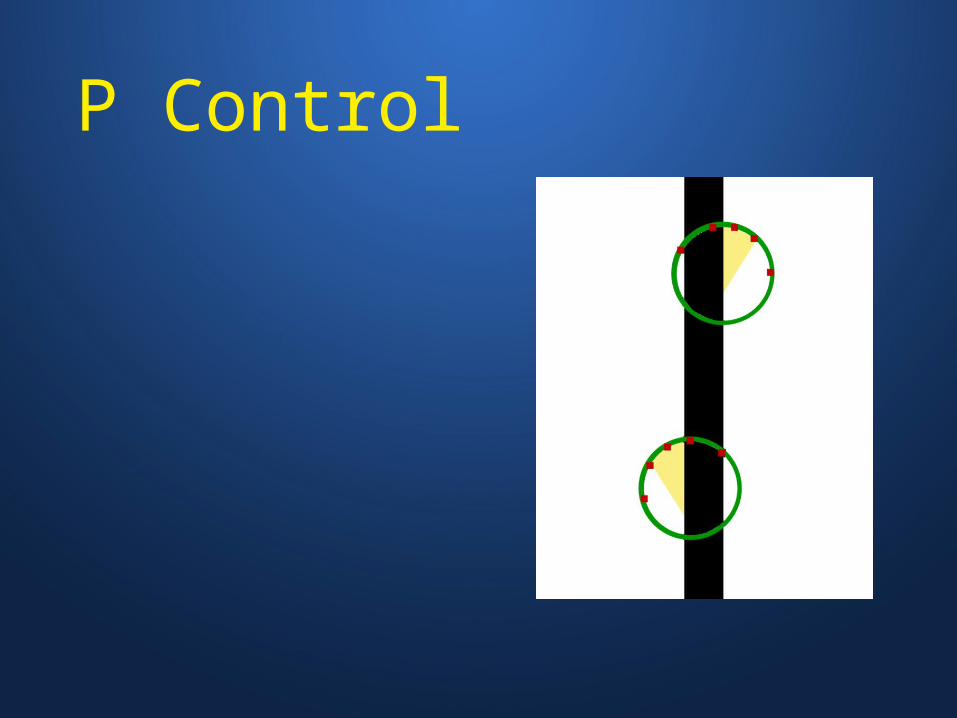
P Control
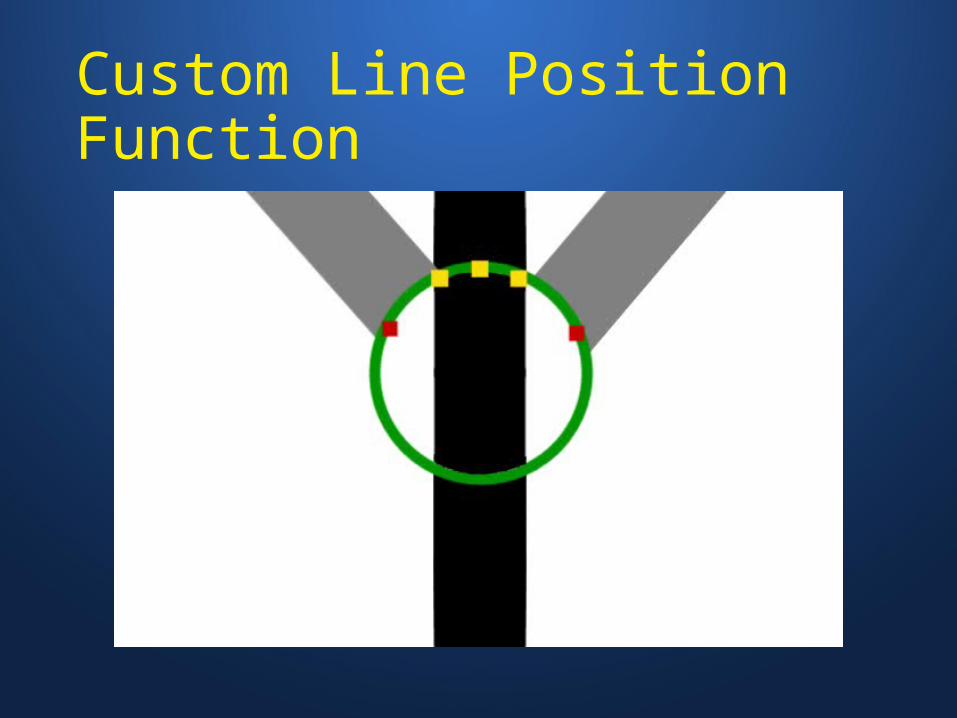
Custom Line Position Function
Sharp Turns, P control and Speed • Turns greater that 90°
• Original Line Position Function• Five Sensors for line detection on far left or right
• P control value• Lower value for reliability• Higher value for speed
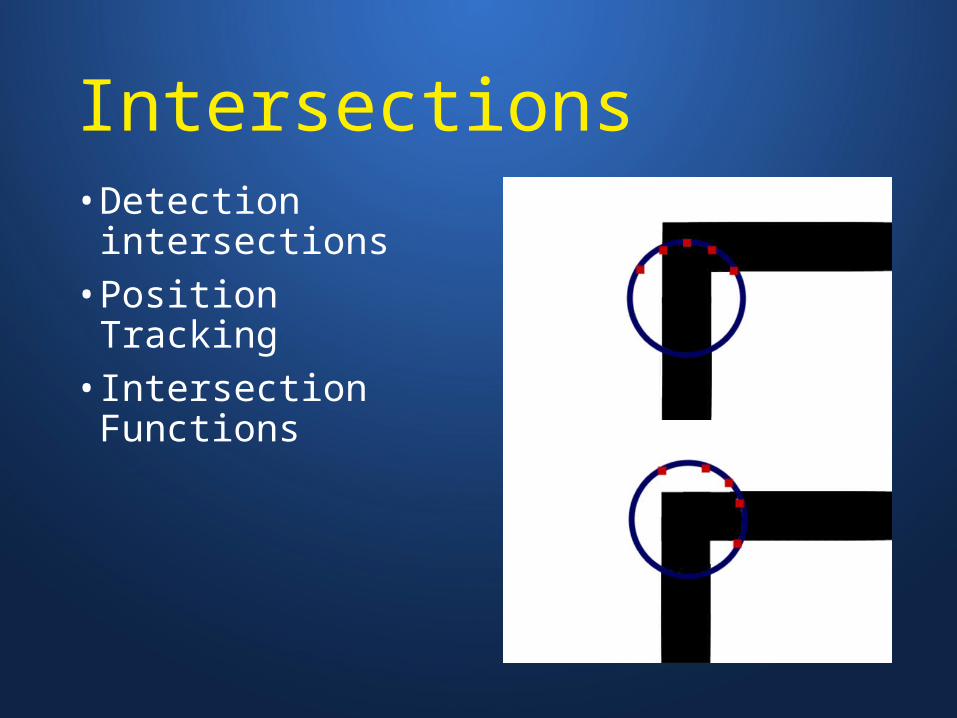
Intersections• Detection intersections
• Position Tracking
• Intersection Functions
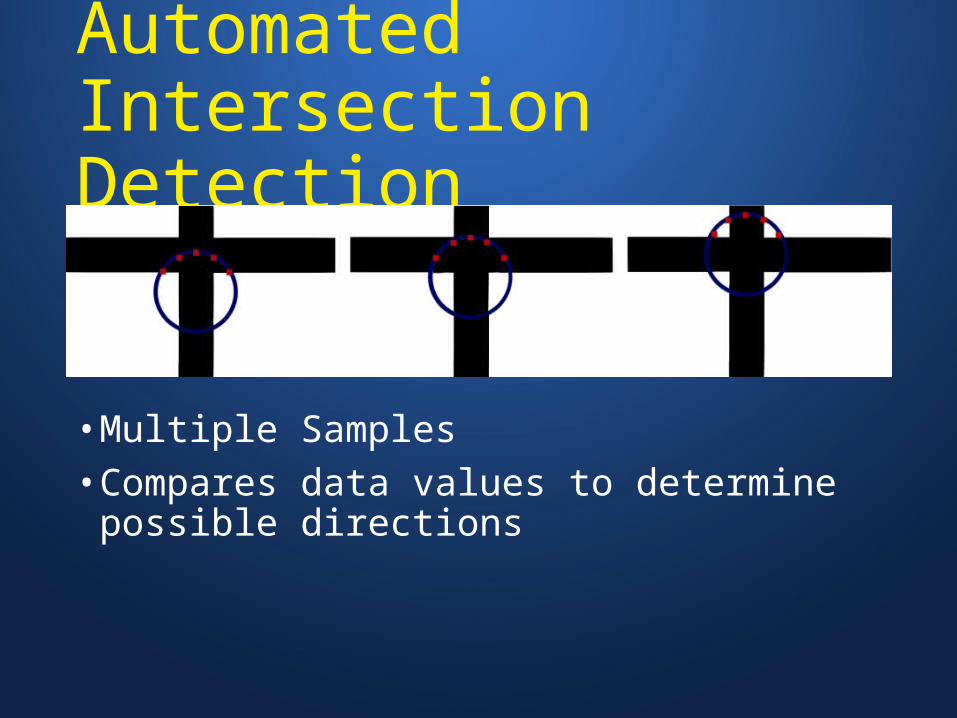
Automated Intersection Detection
• Multiple Samples
• Compares data values to determine possible directions
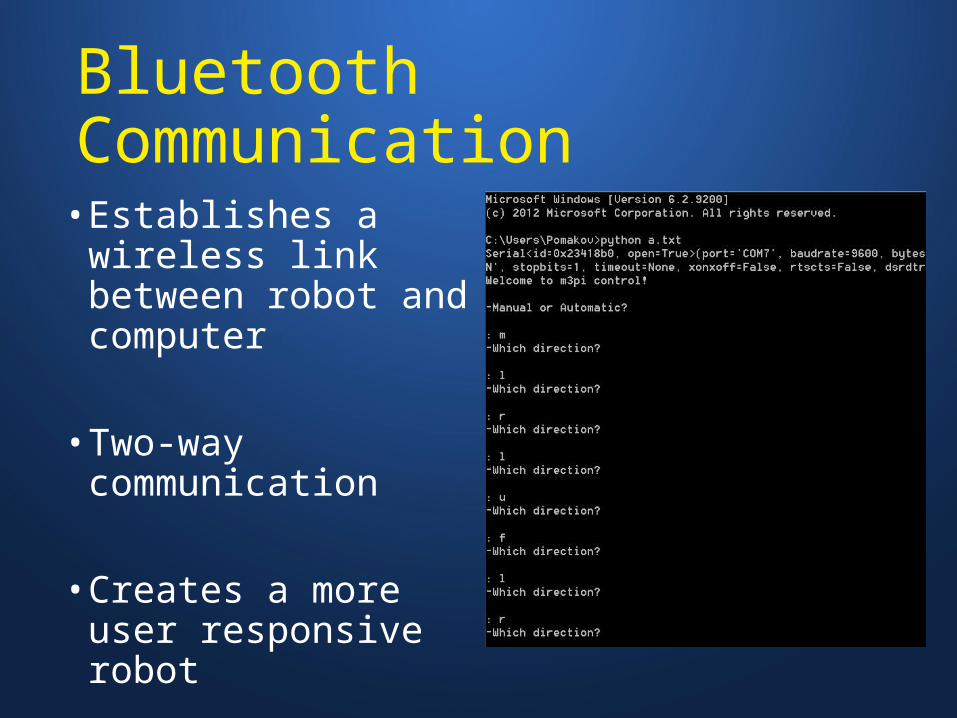
Bluetooth Communication• Establishes a wireless
link between robot and computer
• Two-way communication
• Creates a more user responsive robot
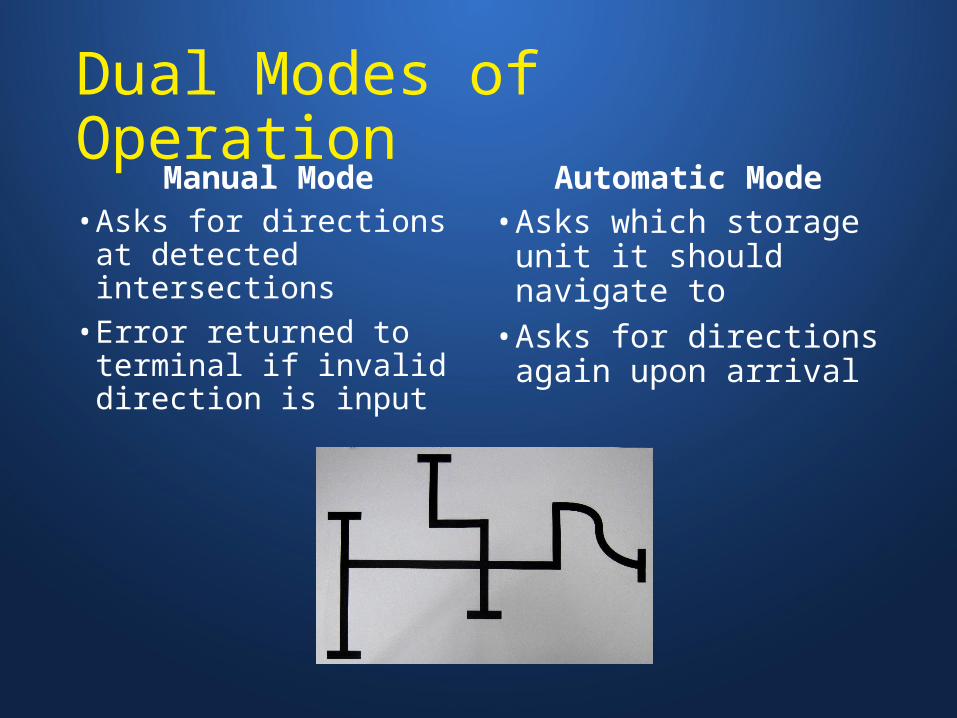
Dual Modes of OperationManual Mode
• Asks for directions at detected intersections
• Error returned to terminal if invalid direction is input
Automatic Mode• Asks which storage unit
it should navigate to
• Asks for directions again upon arrival
Extremum Seeking Controller
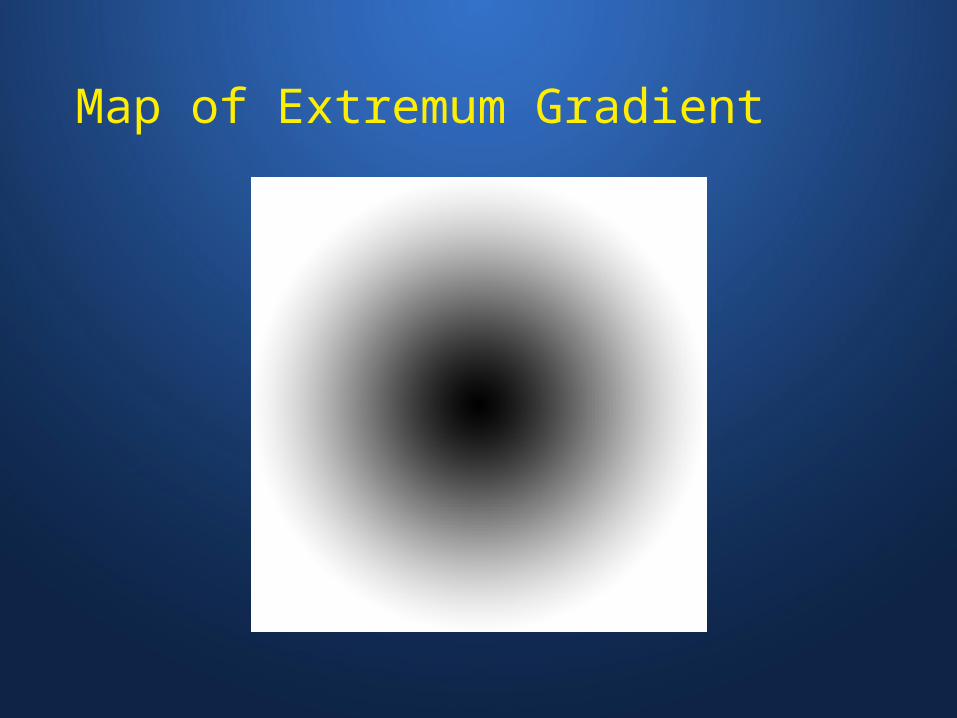
Map of Extremum Gradient
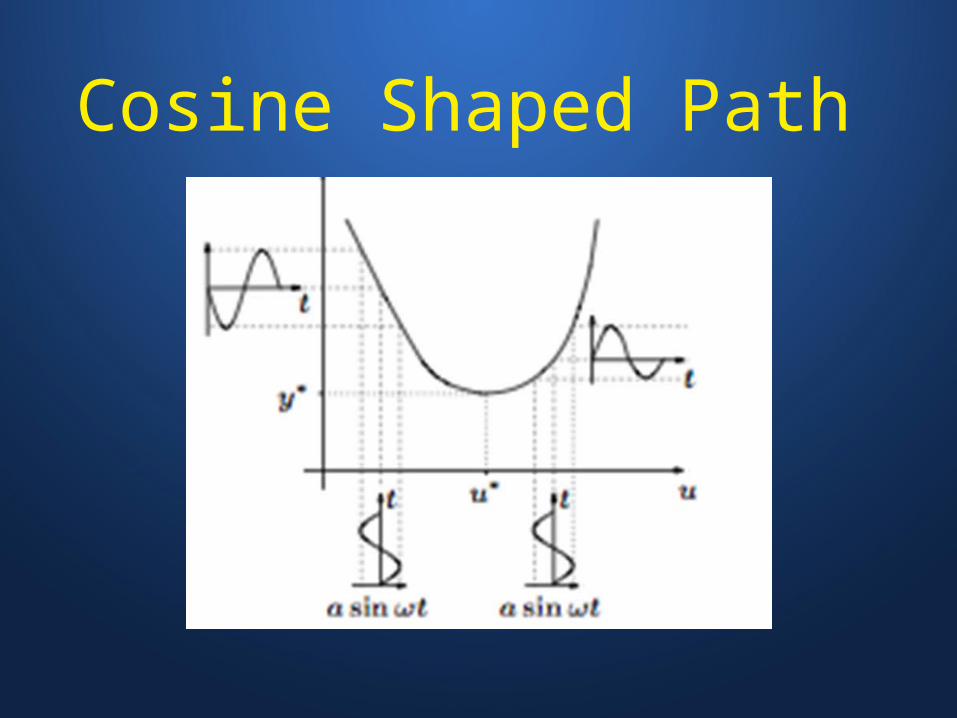
Cosine Shaped Path
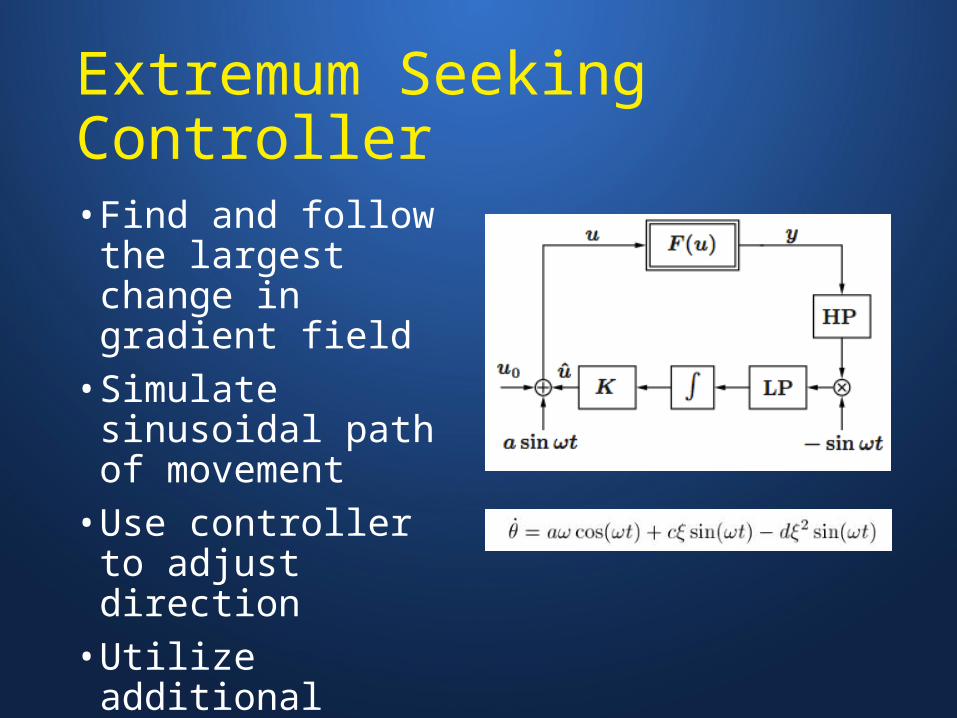
Extremum Seeking Controller• Find and follow the
largest change in gradient field
• Simulate sinusoidal path of movement
• Use controller to adjust direction
• Utilize additional controller to smooth movement
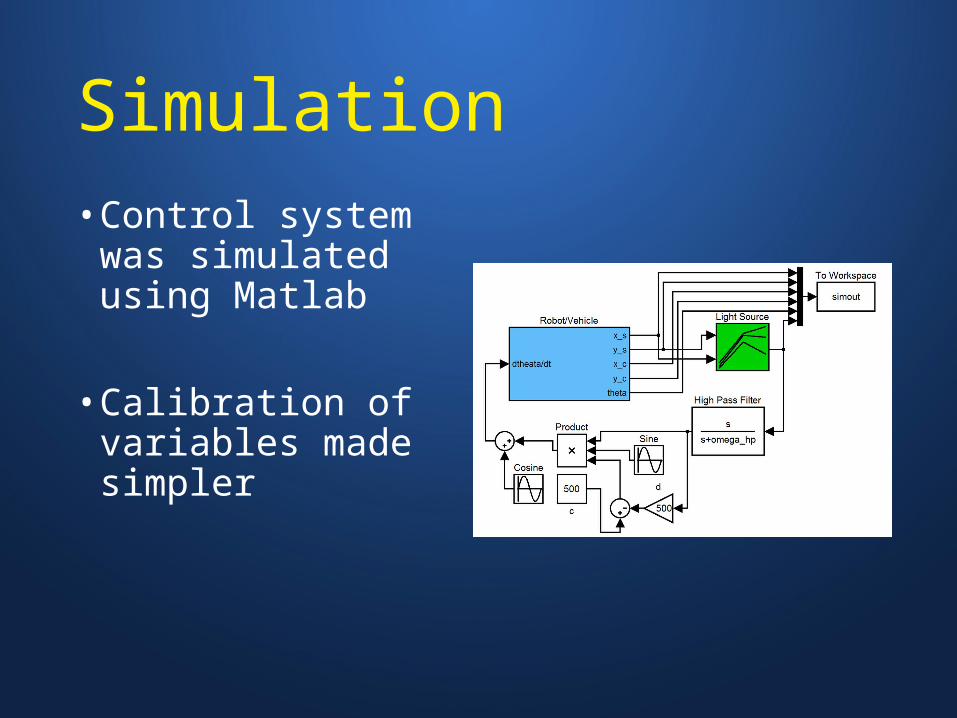
Simulation• Control system was
simulated using Matlab
• Calibration of variables made simpler
Summary Part I
• Simple line following program
• 90° turns and intersection detection
• Bluetooth communication
Part II
• Robot Extremum Seeking Controller operation
• Gradient following program
• Operation using simulation results
Contact InformationAriana Miran
Jinhao Ping
Rossen Pomakov
Nikki Schumaker
Lindsey Stolzenfeld