Embed Size (px)
Citation preview


Human PowerThe Technical Journal of the
International Human-PoweredVehicle Association
David Gordon Wilson, Editor21 Winthrop Street
Winchester, MA 01890-2851, USA(617) 729-2203 (home)(617) 253-5121 (MIT)
Associate EditorsToshio Kataoka-Japan
1-7-2-818 Hiranomiya-MachiHirana-ku, Osaka-shi, Japan 547
Theodor Schmidt-EuropeHoheweg 23
CH-3626, Hiinibach, SwitzerlandPhilip Thiel-Watercraft
4720 7th Avenue, NESeattle, WA 98105 USA
IHPVAP.O. Box 51255
Indianapolis, IN 46251 USA(317) 876-9478
Dave Kennedy PresidentAdam Englund SecretaryBruce Rosenstiel TreasurerPaul MacCready International
PresidentDoug Milliken VP WaterGlen Cole VP LandGlen Ray VP AirMatteo Martignoni VP All TerrainTheodor Schmidt VP Hybrid PowerDavid Gordon Wilson Executive VPAllan Abbott Board MembersMarti DailyPeter ErnstChet KyleGardner MartinMatteo MartignoniDennis TavesDavid Gordon WilsonMarti Daily Executive Director
Human Power is published quarterly by theInternational Human-Powered Vehicle Associa-tion, Inc., a non-profit organization devoted tothe study and application of human muscularpotential to propel craft through the air, in thewater and on land. Membership information isavailable by sending a self-addressed, stampedbusiness-sized envelope to the IHPVA at theaddress listed above.
Members may purchase additional copiesof Human Power for $3.50 each. Nonmembersmay purchase issues for $5.00 per copy.
Material in Human Power is copyrightedby the IHPVA. Unless copyrighted by theauthor(s), complete articles or representativeexcerpts may be published elsewhere if fullcredit to the author(s) and the IHPVA isprominently given.
Special thanks to the authors, Marti Daily,Carolyn Stitson and Kim Griesemer, withoutwhom this issue would not have been possible.
EditorialsThis issue: volume 8 number 4
This issue carries some of the excellentarticles on water vehicles gathered by theguest editors of the last issue, Phil Thieland Theo Schmidt. Not all articles wouldfit in that issue, and we had a head start onthis by using them.
That issue was numbered 8/1: a slipcaused the first of volume 8 to be num-bered 8/2. Steve des Jardins edited theSource Guide, and it was numbered,logically, 8/3. Hence this is 8/4.
Normally, contributions are sent to usfor publication in a highly nonsteadystream, but with a degree of necessarypruning they seem to give us four issues ayear. The watercraft issue shows what canbe done when two dedicated editors applytheir persuasion to the leaders in the field.We would welcome offers of other public-spirited people to edit future issues onspecial topics.
Research neededMost HPVs in all media use pedals for
power input. Yet I have never seen data onthe drag of enclosed or open pedalling feetand legs. The drag has to be quite large,and a little research may lead to a largepayoff.
You may wonder why I am soconvinced that the drag of pedals, cranksand lower legs is large. Cold feet con-vinced me. Whereas I can keep all otherparts of my anatomy warm and comfort-able when I'm bicycling in the winter attemperatures down to below zero (F)(-18°C), my feet, despite two pairs of socks
In this issue-How to make a wooden propeller
by Philip ThielEditorialsLetters to the editorReviewsLow-energy boats by Theo SchmidtDragonfly III by Daniel HostetterOutboard Alternatives by Philip ThielRear-wheel-steering basics
by John C. WhiteheadBicycle fairings and efficiency
by Dave KehoeThe Seacycle Story by John Foley
and rubber overshoes and very goodcirculation, just get colder and colder. Theonly difference between my feet and myhands, apart from the work my feet aredoing, which should make them warmer,is the rapid relative movement of my feetand lower legs. Convective heat transfer isproportional approximately to the squareof relative air velocity, so that when one'sfoot is at the top of the pedalling circle it isgoing considerably faster than the ma-chine, while at the bottom of the stroke it isgoing slower, but the average heat transferis much higher than on one's hand, forexample. The power losses due to dragincrease as the cube of the relative velocity.
If this is the reason my feet get cold,and it agrees with the data, then we caninfer that the aerodynamic drag, which isclosely related to heat transfer, must alsobe high. Here's a topic for a master's ordoctoral thesis that would be challengingand could offer racers a considerablereduction in drag, if appropriate fairings(or faired footwear) are designed.
Flat-tire directional performanceAnother area of needed R&D is the
steering performance of wheels with flattires. I have had many slow-speed andmedium-speed blowouts in front tires ofbicycles, and because I survived them Iconvinced myself that I had developedsurvival skills to cope with any emer-gency. One blowout dropped me from myMoulton SpeedSix right in front of amoving bus, but it was the driver's skilland the bus's brakes that saved me, notany ability of mine. This September I hadmy first high-speed front-tire blowout, ona steep hill in northern Vermont, and as Iwas wearing far too little on my hands andlegs I lost a great deal of skin. (And tryingto ride in the following weeks with my leftbutt off the recumbent seat did somethingextremely painful to pinch a nerve exitingmy spine). When the tire burst the bikeshot off to the left, which would have putme under a passing truck or into an on-coming car if either had been in the rightplace at the wrong time.
Many of you could top my experi-ence-join in any group of experiencedHPV people or bicyclists and you will hearsimilar stories. But it doesn't have to bethat way. We don't have to ride or drivesweetly running machines that convert in afraction of a second into dangerousassemblies of sharp metal. Riders in faired
2 Human Power 8/4
I
.

recumbents have shown many times thatthey can survive a high-speed spillwithout receiving a scratch-but I'm notsure that I want to be skidding on my sideenclosed by a fragile fairing in a road fullof massive high-speed motor vehicles. I'drather be able to come to a controlled stop,meaning that the steering is good enoughto keep me upright. A general principle ofdesign is to produce devices that "fail-soft", not "fail-disastrously". So anothertopic for research is the behavior of single-track vehicles after the tire on the steeredwheel has blown, and the development oftires that stay on the rims and give gooddirectional control.
Envy of automotive developmentsEllen and I bought a new car last year.
The only vehicle we could get in the typewe wanted came "loaded". I grumbledthat I didn't want the automatic door locksand the powered windows and the cruisecontrol and so on. But-you've guessedit-I've found them really rather delight-ful. I began musing as to why we have sofew innovations in commercial HPVs. Wecan blame the suppression of recumbentsin the thirties on the dead hand of regula-tion from the UCI. But in today's vibrantbicycling climate-in which mountainbikes in their second coming are settingextraordinary sales records--only digitalodometers, pre-set multi-ratio derailleurgears and new forms of handlebars couldbe regarded as true innovations.
The subsidy to car drivers-nowbeing assessed as being between $5000 and$10,000 per year in the US-has to be thedominant factor. It has certainly stifledinnovation in competing fields of transpor-tation: buses, mass-transit and railroadshaven't changed in essentials in the lastfifty years, and remain viable, in general,only if they themselves receive large subsi-dies. If-a large if-our politicianseventually realize that subsidizingautomobiles is costing far more than thesubsidies themselves, and if they removepart or all of the subsidies and therebyrestore some free-market competition,HPVs would be in the mainstream andtechnology would advance rapidly. Thenwe would see a stream of innovationscomparable to those that make peoplewant to buy new cars every year or two.But, even then, could we really get HPVcruise control?
Our associate editor in JapanToshio Kataoka has agreed to take on
the title of associate editor of Human Power
in Japan. He has been sending us invalu-able news and reports, and we wanted torecognize his generous contributions.Welcome and thank you, Toshio!
CorrectionWe apologize to Bruce Sewart for mis-
spelling his name in HP 8/1, in TheSpinsurfer story.
-Dave Wilson
Letters to the editor
Swedish hydrofoilIn Sweden a two-person hydrofoil, the
AF Chapman II, has been built by peoplefrom Chalmers university. They pedalback-to-back, and so far they have reachedalmost 12 knots (6 m/s). The aim is theEuropean championships for human-powered boats, to be held in Sweden forthe first time in May 1991. Last year 27boats and about 300 participants fromtwelve different countries competed.Chalmers University had the only hydro-foil and won the innovation prize. Thisyear it is rumored that there will be severalmore hydrofoils. The AF Chapman IIweighs 54 kg and took 3000 hours to build.
Your HPV-cyclist,Mats NilssonHermelinsu 151902 38 UMEASWEDEN
Good suspension for recumbentsYou guys are doing a great job. My
spirits jump when I get your (our) publica-tions in the mail.... We have been ridingrecumbent bikes with a good workingsuspension system for a couple of yearsnow. We took them on a terrific 500-miletour in Italy, Corsica and Sardinia this pastsummer.
Steve Smith2 Acoma Street #5Denver CO 80223USA
Steve not only sent in a donation to theIHPVA but offered to write something on therecumbent suspension system.
-Ed.
Reviews
Fahrradpatente -"Cycle patents" as-sembled and discussed by UlrichHerzog (in German). Moby DickVerlag, Kiel, 1984.
This delightful paperback was sent tome by John Strozyk, to whom I amindebted. I am a strong advocate oflooking at patents before claiming original-ity in anything, and perhaps even beforeone starts brainstorming. Finding thepatents to examine is a fairly tediousbusiness, better accomplished by commis-sioning experts. But here is a book of 191pages in which about eighty HPV patentsare reviewed. (The German word Fahrradis not restricted to bicycles). US, Europeanand British patents are displayed in sevenprincipal topic areas (transmissions,brakes, and so forth). Generally thedrawings are on a page to the left, and adescription of the concept and a discussionare on the right. The period is supposed tobe the last two-hundred years, but most ofthe patents were issued from 1878 to 1910.Two aspects give me a little concern. Therewere presumably thousands of cycle-related patents issued in this period: howwere these representatives selected? Myreading ability in German is not goodenough to find an explanation in theintroduction, but the author is to beallowed a license, and presumably hechose what interested him. Alas, theauthor perpetuates a myth in a historicaltable he reproduces: that of the Compte deSivrac and his nonexistent precursor of thebicycle. Historical myths are like many-headed hydra: they are debunked, exposedand de-frocked, but they appear elsewhereundamaged but damaging.
These are small criticisms. We aregrateful to have this excellent little bookavailable, and to learn from the incrediblydedicated and highly skilled efforts of thepioneers.
Cycling Science, vol. 2/2, June 1990The cover photograph is of Francis
Faure breaking the world hour record onthe recumbent Velocar in 1933. It empha-sizes something that many re-writers ofHPV history haven't checked: the Velocar,in the form used by Faure to break a wholerange of records, was an unfaired recum-bent bicycle. The photograph is part of thefirst article, by Arnfried Schmitz, a retiredengineer of Lioux-Gordes, France, on HPV
(continued on page 4)
Human Power 8/4 3· _

Low-Energy Boatsby Theo Schmidt
This issue is mainly about some typesof low-energy boats. Until recently, allboats were "low-energy", but the internal-combustion engine has changed this. In amanner which is exactly analogous to thedevelopment of cars on land, modernpower boats have become a source ofnoise, pollution, and danger. They causewaste, annoyance, and erosion. Their brashsuccess has killed off traditional boatdesign and lifestyles, and previously intacteco-systems. Viewed in a long-termperspective, these disadvantages faroutweigh the short-term advantages forindividuals using such craft.
But the times are changing! Increasingenvironmental awareness and correspond-ing legislation are making low-energyphilosophies more attractive and helpingto re-introduce proven concepts anddevelop exciting new ones. The followingsummarizes some old and new "low-energy" technologies:
Sailing boats are a special case.Although designed to require as littleenergy as possible for propulsion, thepowers and forces passing through riggingand hull are considerable. Some craft areable to move many tons of cargo usingvery little manpower, e.g., the largeThames Barge, which was traditionallyworked by a man and a boy and couldcarry 120 tons. Modern designs usingwingsails or wind turbines can even becontrolled remotely or at the touch of abutton. Sailing craft can be remarkablyfast, and they give pleasure to countlesssailors worldwide.
Animal-powered barges were once inwidespread use. Efficiency was mostlygained by operating at very low (walking)speeds, where the resistance in the water isextremely low due to the absence ofgradients and mechanical friction andbecause power increases or decreases withat least the third power of the speed. Asingle animal can pull a barge weighing100 tons or more.
A "high-speed" example of animal-powered efficiency is also available: over acentury ago, several "Fast Packet Boats"plied the Lancaster Canal between Kendaland Preston, carrying up to 120 passengersat average speeds of nearly 8 knots (4 m/s)with the power from two horses! Althoughthe horses were changed every 4 miles (6.5
4 Human Power 8/4
km), the passengers in the 75-ft-long (23-m) and 6-ft-wide (1.8-m) vessels could
. .. 1 --- _1 . " I 1 -
travel qulcKer ana more comortaDly tnanon the roads of that period. A modernferry would use perhaps 100 times thepower for the same result.
Human-powered boats are the oldestmeans of transport known to Man. Eventoday, some peoples still use woodendugouts which they paddle on quiet riverswith remarkable efficiency. Other peoplesdeveloped skin boats: kayaks, baidarkas,and canoes, using these for transportation,hunting and waging war. Such boats haveshaped the history of many Americanareas, in contrast to the rowing craft oreven early galleys around Europe, whichwere probably sailed whenever possible.
In the Orient, too, junks and the likewere and are often driven by a longsculling sweep called a yulch, allowingsingle persons to propel rather heavyvessels at about walking speed.
Other traditional uses include ferriesworked by pulling them across riversalong a stretched rope. To this day, a three-car ferry crosses the Rio Grande, pulled bysix men.
Today, many people are re-discover-ing the joys of human-powered boats, notso much as a means of transportation, butfor fun, fitness, and adventure.
Steam boats: Although the steamengine (and even more the steam turbine)is a concentrated source of power, itsefficiency is limited, and the requiredboilers are heavy and large. Therefore,steamboat hulls have had to evolve to beefficient, and their elegant lines bear littleresemblance to the pseudo-speedboat-typehulls so prevalent today.
Electric boats evolved in much thesame manner as steam boats. Displace-ment hulls easily carry the heavy leadbatteries. Because of the limited range andthe high cost of these batteries, electricboats never became very popular in an agewhere coal was cheap and electricity aluxury.
Today's electric technology haschanged this. Modern electric boats workadmirably in all conditions, except wheresustained high speed is called for, e.g.,- -_ r'_ l .......- .. .. r"1 I I
orrsnore rescue oats. I ney can De renaer-ed partially or totally autonomous by fit-ting smaller or larger areas of solar panels.
Solar boats represent the newestdevelopment in our list. They combinemany of the advantages and characteristicsof both human-powered and sailing boats.They work even in cloudy and windyclimates, except perhaps in high-latitudewinters. The problem that remains is stillthe high cost of solar cells. Although well-affordable as luxury items, those people indeveloping countries who could best usesuch boats are least able to pay for them.
All the listed craft have one thing incommon: the source of power is limitedand not very concentrated, but can bederived from non-polluting, quiet sources.It is precisely this lack of cheap high-power which calls for efficient, elegantsolutions in hull design and renders suchcraft worthy flagships in our new environ-mentally conscious age.
Theodor SchmidtH6heweg 23CH-3626, HiinibachSWITZERLAND
Reviews(continued from page 3)
history. The drawing of Charles Mochet'sinvention at the head of his article revealssomething else of great interest to me:Mochet designed a long-wheelbaserecumbent, but it was modified to amedium-wheelbase form for Faure. Thebottom bracket was almost over the frontwheel, a design finding renewed favornowadays. Schmitz brings a wealth of newdetails to the story of French recumbentsand other HPVs, partly from interviewingmembers of pioneers' families, and hegives some information that may requirefurther revisions in cycling history. Thephotographs are delightful.
There are many other useful articlesand short reports on, for instances, hill-climbing when sitting, standing and usingtoe clips; carbohydrate replacement inprolonged exercise; and energy use inbicycling.
Volume 2 no. 3, September 1990A principal article is on the effect of
drafting and aerodynamic equipment onenergy expenditure during cycling, byJames M. Hagberg and Steve D. McCole ofthe University of Maryland. Chet Kyle hasa useful article on quick calculations of
(continued on page 15)



Pedaltroller patent drawings, US patent No. 4,427,392
Although intended primarily fortrolling, in application to this boat theinventor claims the average person canachieve speeds of 5 to 7 mph (2 to 3 m/s)and easily cope with head winds. Becauseof the 360-degree steering, the maneuvera-bility is especially good.
Experimentation with propellers andgearing is continuing, along with the de-velopment of 8- to 10-foot (2.4- to 3-m)one-person tractor-propelled watercraft.
The inventor is looking for investors.Bob Benjamin's Pedal Boat Drive (2)
incorporates a forward-facing seat andpedal assembly that clamps to a thwartand a clamp-on drive assembly whichadapts to different transom dimensions.The former weighs 34 lb (15.5 kg) and thelatter 18 lb (8.2 kg). The right-angle 1:1gear box with pedals transmits powerthrough a telescoping shaft to the swivel-ing sprocket-chain drive system on the
transom. The drive chain is completelyenclosed in twin tubes in a V-configura-tion, and connects with a 16-inch- (406-mm-) diameter three-bladed propeller.The drawing shows the assembly of bothcomponents and identifies the materials.Photographs illustrate the assembly, itsapplication to a 14-foot (4.27-m) fishingboat and the propeller. Trials using thisboat over a 200-foot (61-m) course withtwo people aboard for a displacement of510 lb (232 kg) gave the results shown inthe accompanying chart. The designernotes that in application to a 17-foot (5.2-m) canoe with two people aboard thespeed was 1.2 mph (0.5 m/s) faster, theoperator in both cases being an "averagenon-athletic" person. The designer alsocomments that when installed on a 12 to14-foot (3.6 - 4.3-m) fishing boat with fouror five people on board an average personis able to pedal at trolling speed all daylong and that even small children do sur-prisingly well. Steering is accomplishedwith the use of hand levers on both sidesof the seat which, connected by chains tothe final-drive assembly, turn it from sideto side, giving quick and positive control.
This Pedal Boat Drive is available for$695, shipped via U.P.S. or parcel post.The cast aluminum propeller is alsoavailable for $85, and the gear box for$145.
Human Power 8/4 7
TV


Rear-wheel-steering basicsby John C. Whitehead
This article is a summary of what isknown about rear-wheel-steering (RWS)dynamics. Since a complete treatmentwould require many pages, it appears as acollection of concepts which are explainedwith minimal supporting evidence.Although mathematics and experimentaldata are both absent from this article, eve-rything included is supported by one ormore rigorous technical papers. Thereferences are listed for completeness, butthe intent is for the reader with practicalquestions to benefit from this article alone.I have found it productive to understandfront-wheel steering (FWS) and to makedirect comparisons between FWS andRWS vehicles in various situations. Thisand other thought processes which haveled to my present understanding of RWSare, I hope, conveyed here.
Most people who have observed orthought about RWS vehicles know that"RWS is unstable." However, this is notalways necessarily true, and instabilitydoes not always imply uselessness (abicycle with no rider is unstable because itwill fall over, but who cares?). When oneconsiders a dynamic system, statementsabout response, stability, and control areincomplete unless the system of interest isprecisely defined, including the degrees offreedom, and what the inputs and outputsare. For lateral vehicle dynamics, the inputcomes through the steering mechanism,and the main output of interest is the pathof the vehicle on the road. It may be lessobvious what the degrees of freedom are,but they include yaw rate (rotationalvelocity about a vertical axis), and lateralvelocity. That's right, road vehicles do notin general move exactly "forward" alongtheir longitudinal axis. The lateral velocitycomponent is a tiny fraction of a vehicle'sforward speed, but it is the key to under-standing much about vehicle dynamics.
Five different RWS systems areconsidered here, each of which is a preciseway of representing a particular mode ofoperation of RWS vehicles. They are:
1. steer-angle fixed, steady-statecornering;
2. steer-angle controlled, perform-ing maneuvers;
3. steer-angle free to move ("handsoff" riding);
4. steering-torque input to control
steer angle (person steering); and5. RWS vehicle with only two
wheels.Cases 1-4 are assumed to be multi-trackvehicles, i.e. more than one wheel on atleast one end of the vehicle. It is useful torealize that (1) is a special case of (2), and(3) is a special case of (4) when the torqueis zero. Discussion of RWS bicycles (5) isincluded for completeness.
1. Steady-state corneringImagine both FWS and RWS vehicles
moving in steady-state turns, as dia-grammed in Figure 1. Lines drawnperpendicular to each tire's rollingdirection intersect at the center of theturning circle. The solid lines indicate theobvious low-speed behavior, wherein theFWS turn center is along the extendedrear-axle line, and the RWS turn center isdirectly to the left of the front axle.
Undertee s
Neutral steer
r F;~t~sr.//P I
O v raseer.'I
/ / I/
Forwa/ I
Figure 1. Front-wheel steering and rear-wheel steering vehicles turning left. Turncenter moves forward and may movecloser to or away from vehicle as speedincreases. RWS vehicles may be made toundersteer or oversteer, just as FWS.
A cornering vehicle must be pulledtoward the center of its turning circle by acentripetal force, which increases as thesquare of forward speed for a constant-radius circle. The centripetal force is theresultant of lateral tire forces, which are
REARSTEERING
Figure 2. FWS and RWS vehicles turningleft. Angles are exaggerated, thin arrowsshow local velocity and thck arrowsindicate lateral tire forces.
associated with tire slip angles, the anglebetween a tire's natural rolling directionand its actual velocity vector as shown inthe magnified view of Figure 2. The smalllateral velocity component is due to tiredeformation by the lateral force, notsliding at the tire-road interface as thename "slip angle" may at first imply. Linestoward the turn center must be perpen-dicular to each tire's actual velocity vector.Therefore, the turn center moves forwardwith increasing speed, as shown by thedashed lines in Figure 1. For high-speedHPVs and automobiles on the highway,the turn center is forward of the front axlefor FWS as well as RWS, because tire slipangles are greater than the steer angle [161.The fact that the high-speed turn center isforward of the front axle for all vehiclesmeans that the vehicle's longitudinal axisis turned slightly inwards toward the turncenter, which requires that the vehicle'ssideslip (lateral) velocity is toward theoutside of the turn.
As speed changes, the turn centerdoes not just move fore and aft. It may alsomove toward or away from the vehicle,because the front and rear slip angles canchange by different amounts, due toimbalance in the front/rear weightdistribution relative to the tires' cornering-force-generating capabilities. If the turncenter moves toward the vehicle as speedincreases, the cornering circle gets smaller.Such a vehicle would appear to steer tootightly while accelerating in a turn with a
Human Power 8/4 9
II
lnd-rterr.,

constant steer angle, so this condition iscalled oversteer. Above a critical speed, anoversteering vehicle will spiral into ever-tighter cornering and spin out, even withthe steered wheels pointed straight ahead.Understeer is just the opposite of oversteeras Figure 1 indicates, so an acceleratingvehicle with a constant steer angle wouldcorner less tightly. Neutral-steeringvehicles have a perfect front/rear balance,i.e. equal weight divided by corneringforce capability (technically, the neutralsteer point is at the center of gravity). Forexample, a tricycle with three identicaltires should have 1/3 of its weight(including rider) on each wheel for neutralsteering. A small amount of understeeringis generally preferred, which means that atricycle with two front wheels should haveover 70% of its weight on the front if alltires are identical. If the rear tire has morecontact area than a front tire, then under-steering would occur with 1/3 of theweight on the rear.
Given the above factors that deter-mine understeer/oversteer, it is easy to seethat these phenomena are independent ofwhich wheels are steerable. An RWSvehicle with a constant steer angle is justlike an FWS vehicle with the body yawedrelative to the chassis. The author has builtand recorded maneuvering data from aRWS three-wheel car which understeeredwith a 80/20 weight distribution [14]. Notethat forklift trucks have a large counter-weight over the steered wheels so whenunladen they actually do oversteer ifdriven in the nominal RWS direction [10].There will be understeer if the vehicle isturned around, not because the steering ischanged to FWS, but because the f/rweight distribution is reversed. Theproblem which makes RWS vehiclesunusual does not occur during steady-state cornering, so it is important to avoidsaying "oversteer" when you mean thehandlebars were turned too far ("over-shoot" is the technical word).
2. Maneuvers in response to steer-angle change
Consider a vehicle following a straightpath. If the front wheels are suddenlysteered to the left, the front of the vehicleaccelerates to the left and it begins to fol-low a curved path due to the resulting yawrotation. If a left turn is desired with RWS,the linkage must steer the rear wheel(s) tothe right. Then, the rear accelerates to theright and the vehicle also begins to followa curved path to the left due to the sameyaw rotation as in the FWS case. Thus, thetransient response to steer-angle control
10 Human Power 8/4
should be understood to have two parts:the initial lateral motion at one end of thevehicle, and the path change due to yawrotation. RWS is unusual because theinitial motion at the rear is in the oppositedirection to the desired turn. At highspeeds, however, this reverse actionbecomes a smaller part of the overalltransient response because lateral motionresulting from yaw rotation is essentiallyamplified by forward speed, and there isno fundamental difference between FWSand RWS yaw responses to steer-angleinputs [16].
Figure 3 shows transient lateralposition of a vehicle center of gravity[from ref 16]. At low speed, the RWSvehicle clearly has initial motion in thedirection opposite to the desired turn, butthe RWS response becomes more like theFWS response as speed is increased.Therefore, to the extent that riders canmaintain precise control of the steer angleof the steered wheel(s) at all times, RWSvehicles should become less unusual asspeed is increased. To this end, it is helpfulto have a very precise steering linkagewith high stiffness and no backlash, andthe frame must be rigid for the samereason.
0.4
0.3-
0.2-
0.1 -
0.0-
A x
0
0II2E
CL'i
e--
0.8 1.0
0
0.5-
0.4 -
0.3-
0.2-
0.1 -
0.0 -
0. 0 0.2 0.4 0.6Time, sec
Figure 3. Calculated lateral positionresponses to a steer angle input, for asmall road vehicle.
3. Hands-off dynamicsIn reality, riders do not steer by con-
tinuous precise steer-angle control. It isdesirable for vehicles to go straight ifattention to steering is momentarilyinterrupted. In order to analyze this modeof operation, the steer angle is a degree offreedom, influenced by steering torques.The major steering-torque component inthe hands-off vehicle is due to lateral tireforce, with caster offset ("trail") as themoment arm. It is well known that thesteering geometry of FWS vehicles isconfigured such that the tire-road contactpatch trails behind the steering axis, so thelateral tire force tends to return the steeredwheel(s) to the straight-ahead position, asindicated in the upper diagram in Figure 2.This self-centering caster effect in FWSvehicles is due to both transient andsteady-state restoring torques.
Whether there is a "correct" steeringgeometry for the RWS case is less obvious,because transient and steady-state lateraltire forces are in opposite directions, andthus apply steering torques of oppositesign with any caster offset. If a steered rearwheel has trail like a steered front wheel,then the transient lateral tire force associ-ated with a steer-angle change from thestraight-ahead position applies a restoringtorque, just as in the FWS case. However,the resulting steady-state lateral tire forcetoward the center of the turning circlewould tend to increase the steer angle,causing a divergent hands-off instabilityand immediate spinout (note again it is notcorrect to think of this as oversteer). Sincecentripetal force increases with vehiclespeed for a given steer angle, the severityof the instability increases with vehiclespeed.
To provide a restoring torque duringcornering, the preferred rear steeringgeometry has a tire-road contact patchwhich leads ahead of the point where thesteering axis intersects the road ["negativecaster", ref 6], as shown in Figure 2, eventhough this is opposite to "trail" intuitionand transient torques are destabilizing.With RWS "negative caster", there is anoscillation which is less undesirable thanthe divergence due to caster or trail in theusual FWS direction.
Hands-off steering oscillation at highspeeds is a reality for both FWS and RWS,which can be understood by another lookat Figure 2. Recall that high-speed tire-slipangles are greater than the steer angle. Ifthe FWS steering mechanism is released,the steer angle will rapidly return to zero,but a significant fraction of the front tireslip angle will remain, along with its
speed = 4 m/secsteer angle 0.1 rd
FWS
RWS
speed = 10 m/secsteer angle 0.1 rd
FWS
RWS
speed = 25 m/secsteer angle .01 rad
140 mec
FWS
RWS
Am
M'
-- . I . I . IA <

associated lateral tire force. Essentially, thevehicle is still in a left turn, and theremaining fraction of lateral tire forcecauses steer-angle overshoot to put thevehicle in a right turn. Several cycles maypersist, but the oscillation is usually stable(it damps out) in the FWS case [9].
Now consider the RWS diagram inFigure 2. If the steering mechanism isreleased, the rear steer angle will return tothe straight-ahead position, as desired.Unfortunately, the rear-tire-slip angleincreases as this happens, resulting in anincreasing lateral tire force for an over-shoot torque greater than the steady-staterestoring torque. The result is that RWSvehicles have an oscillation of increasingmagnitude in the hands-off condition. Tomitigate this instability, the caster offsetdistance should be small, as shown 50years ago in Buckminster Fuller's patentdrawing of the Dymaxion Car [3]. In 1983,the author showed by eigenvalue analysisthat a large amount of steering dampingcan actually stabilize the oscillation [11,12]. The IHPVA RWS speed record is over22 m/sec (50 mph), set by Eric Edwards'Pegasus which incorporated the preferredRWS geometry with damping [2]. Anactive controller could stabilize the oscilla-tion better than a damper, using relativelylittle power since the RWS destabilizingtorques are transient with the preferredsteering geometry [15].
There can be other stabilizing influ-ences, such as a tilted steering axis whichlifts the vehicle upon steering, to provide arestoring torque. With two steered rearwheels, steering-axis inclination in thetransverse plane can be used to achievethis without losing symmetry. One reportindicates RWS success with this concept [8,see also 7 and 18]. There is also thepossibility of having limited front steeringfor high-speed stability, with RWS for tightcornering at low speed [13].
4. Person steeringThe technical literature on driver
steering control of automobiles typicallyconsiders that drivers adjust the steering-wheel position to obtain the desired pathof motion on the roadway [4]. Newton'slaws state that a force must be applied tomove something, so the assumption thatriders can directly control the angle ofhandlebars is therefore an approximation.In reality, forces must be applied to thehandlebars or steering wheel, whichtranslates to steering torque. The steeringtorque applied by the person is added tothe caster-offset torque, steering-dampingtorque, etc., to determine the true response
of a vehicle. Surprisingly, there is a lack oftechnical literature that treats humansteering as torque application. It seemslikely that riders apply handlebar forces inorder to obtain the desired steer angle,which is easy to do if steer angle andsteering torque are in phase, as duringtypical FWS vehicle operation. Destabil-izing, unsteady, unexpected torquesrequire the rider's control torque vs. timeto be more complicated to obtain the de-sired steer angle, i.e. steering is moredifficult. Thus, it is desirable to have good"hands-off" stability, even if the personnever releases the steering mechanism.
At the eighth IHPSC in 1982, the RedShift II was run with "positive trail" RWS.After a small disturbance, the rider had toapply restoring steering torque to preventthe divergent instability. The unfortunateresult was rider-induced overshoot in theopposite direction and a few cycles ofrapidly growing (rider-in-the-loop)oscillation before the vehicle rolled. Topspeed recorded was 17 m/sec (38 mph) [1,5]. Also at the 1982 IHPSC, Karl Payne'svehicle number 37 with a multi-link RWSmechanism had its (virtual) steering axisaft of the hub, i.e. the preferred geometry.Co-builder Shawn Latham reported to theauthor that the vehicle would oscillate byitself, but this effect was mitigated bymounting the wheel further aft (reducingthe offset distance as recommendedabove).
5. RWS two-wheelersRWS bicycles are extremely difficult to
ride, because of a problem in addition tothe phenomena described above. Two-wheelers must be kept upright duringstraight riding, which means the center ofgravity must be directly above theimaginary balance line connecting the twotire-road contact points. Balancing isnominally controlled by steering to keepthe balance line under the center ofgravity. With FWS, this results in slightleftward cornering if the bicycle had beenleaning too much to the left, which is astable equilibrium. If a RWS bicycle beingridden straight leans a little to the left, therear wheel must be steered to the left tomove the balance line under the center ofgravity. However, this results in a right-turning condition, which tends to makethe bicycle lean further to the left, a diver-gent instability.
The above analysis of balancingassumes the rider is rigid relative to thebicycle. However, lateral motion of therider's torso to shift the center of gravity isan additional control input, which makes it
possible to balance an RWS bicycle. Theauthor built a RWS recumbent bicycle in1983, and could never ride it, but laterobserved a person riding an upright RWSbicycle. It has been reported that arecumbent RWS bicycle has been ridden atMIT [17].
Craig Cornelius has recently pub-lished a fascinating article on rear-steeredrecumbent bicycles (RSRBs) in the spring1990 issue of Human Power. The effect ofhis very long trail design may be to makethe dynamic behavior similar to that offront-steered bicycles.
ConclusionNumerous RWS HPVs have appeared
in IHPVA competition over the years.RWS will continue to be attractive to thoseseeking to optimize vehicle packaging, e.g.front wheel drive permits a short chain,and two nonsteered front wheels fit withina narrow fairing having small wheelopenings. Acceptable stability for RWSHPVs has been achieved, but hands-offstability as good as with FWS may requireactive control. This would need a powersource, so it may not be applicable toHPVs. Finally, the technical literature hasignored secondary stability-enhancingfactors such as steering-axis tilt and vari-ation of caster offset distance with steerangle, so it would be premature toconclude that the best passive steeringmechanism for RWS HPVs has alreadybeen built.
John C. WhiteheadJCW Engineering3322 BiscayneDavis, CA 95616 USA
John Whitehead is a mechanical engineerand has been an IHPVA member with an inter-est in rear-wheel-steering since 1982. He hasbuilt and tested several RWS vehicles, rangingfrom tabletop models to HPVs, to an instru-mented car-sized experimental vehicle for hisPhD research. More recently, he has proposedan active steering stabilizer to help automobiledrivers maintain control during emergencymaneuvers, which would also stabilize RWSvehicles.
References1. Champlin, C.,The Eighth IHPSC, Hu-
man Power, 2/2, p. 5, Spring 1983.2. Edwards, E., Rear Wheel Steering, Sec-
ond IHPVA Scientific Symposium Proceed-ings, p. 140, A.V. Abbott, ed., 1983. Experi-ence with RWS Pegasus HPV (see also vari-ous refs to Pegasus in HP News, 1/5, Aug1983 p.1, 1/6, Nov 1983 p.2.).
Human Power 8/4 11

3. Fuller, R.B., Motor Vehicle, U.S. Patentno. 2,101,057, 1937.
4. McRuer, D., et al, Measurement ofDriver- Vehicle Multiloop Response Propertieswith a Single Disturbance Input, IEEE Trans.on Systems, Man and Cybernetics SMC-5,490-497, 1975.
5. Milkie, T., A Note on Rear WheelSteering, HPV News 1/11, June 1984.Excellent builder/rider account, but sometechnical inaccuracy.
6. Mitschke, M., Comparison of theStability of Front Wheel and Rear Wheel Steer-ed Motor Vehicles, Proceedings of the 6thSymposium on the Dynamics of Vehicles,International Association of VehicleSystem Dynamics, Berlin, pp 316-322, 1979.
7. Perkins, R., Tricycles: Front and RearSteered, HPV News 2/3, Oct 1984. Thebishas two steered rear wheels with largecamber angles (also June 85 issue p. 6,August 87 p. 8, Oct 88 p. 11).
8. Riley, J., Just Recumbents, HPV News4/6 p. 3, Jan 1988. Vacuum Velocipede hastwo steered rear wheels with steering axisinclination, wheel camber, and damperevident in photograph.
9. Segel, L., On the Lateral Stability andControl of the Automobile as Influenced by theDynamics of the Steering System, ASMEJournal of Engineering for Industry,August 1966.
10. Strandberg, L., On Driving Safety andDynamic Characteristics of Rear Wheel SteeredVehicles," Proceedings of the 9th Sympo-sium on the Dynamics of Vehicles,International Association of VehicleSystem Dynamics, 1985.
11. Whitehead, J.C., Rear Steering of RoadVehicles: An Analysis of Yaw Stability,Masters Thesis, University of California atDavis, 1983.
12. Whitehead, Yaw Stability of RearSteered Human Powered Vehicles, SecondIHPVA Scientific Symposium Proceedings,p. 136, A.V. Abbott, ed., 1983.
13. Whitehead and D.L. Margolis, ThreeSteered Wheels for Ultimate Economy withGood Handling, Society of AutomotiveEngineers Trans. 861132, 1986.
14. Whitehead, Response, Stability, andDriver Control of a Rear Wheel SteeringVehicle, PhD Thesis, University of Califor-nia at Davis, 1987.
15. Whitehead, Stabilizing Steering Weavewith Active Torque Versus Semi-ActiveDamping, SAE 891981, 1989.
16. Whitehead, Rear Wheel SteeringDynamics Compared to Front Steering, ASMEJournal of Dynamic Systems, Measure-ment and Control, March 1990.
17. Whitt, F.R., and D.G. Wilson,Bicycling Science, p. 233, MIT Press, 1982.
12 Human Power 8/4
18. (author unknown), Astar-InnovativeSteering Design, HPV News 2/9 p. 5, June1985. ASTAR has two rear wheels whichsteer and lean.
LO
How to make awooden propeller
(continued from page 1)
propellers of similar characteristics andother dimensions.
As is the case with most propellers wewill use a helicoidal surface for the "face",or after side, of the propeller blade. Thishelicoidal surface is generated when astraight line (the "element") revolves withuniform speed about an axis through oneof its ends and at the same time moveswith uniform speed parallel to itself alongthe axis. Any point on the straight linethen generates a curve in space called ahelix, which lies on the surface of a co-axialright circular cylinder. This distance alongthe element between the axis and the givenpoint is the radius, r, and the distance thispoint moves parallel to the axis during onerevolution (360 °) is the pitch, H. Thesuccessive positions of the elementconstitute the helicoidal surface.
H
Figure 2. Pitch angle x @ radius r
If we unwrap one of these co-axialright circular cylinders and lay it out flat,the helix it contains will appear as thehypotenuse of a right triangle whose baseis the circumference C of that cylinder (C =2nrr) and whose altitude is the pitch H. Theangle between the hypotenuse and thebase is the pitch angle x, whose tangent isH / (2nr).
Assuming a maximum blade width of4 inches (102 mm) at a radius of 5 inches(127 mm)[21, a 2-1/2-inch- (63.5 mm)-diameter hub, blade thickness of 3/8
inches (9.5 mm), 5/8 inch (16 mm), and 3/4 inch (18 mm) at tip, maximum width,and hub, respectively, and 1/2 inch (12.7mm) plywood, we can start to determinethe pattern for the blade laminations asfollows.
First, calculate the pitch angles at theradii of the hub, of the point of maximumblade width, and of the blade tip. Thesearetan x (hub) = 24/(271r.25) = 3.0564 x (hub) = 72 °
tan x (max) = 24/(2tr5) = 0.7641 x (max) = 37.50tan x (tip) = 24/(2it8) = 0.4776 x (tip) = 25.5°
Next, draw a series of seven straighthorizontal lines 20 inches (500-mm) longon a sheet of drawing paper, exactly 1/2-inch (12.7-mm) apart. About two inches(50 mm) from the left on the bottom linelocate three points about five inches (130mm) apart. These points represent thestraight-line element which will be thetrailing (after) edge of the propeller blade.At the left element-point, draw a line at thehub pitch angle of 72°; at the center pointdraw a line at the maximum blade-widthradius pitch angle of 37.5°; and at the rightdraw a line at the tip pitch angle of 25.5 °.
These inclined lines are the hypotenusesrepresenting the blade face at each radius.
Above and to the left of the hypote-nuse for the pitch angle at maximumblade-width, lay out maximum blade-width of 4 inches (102 mm), and the bladethickness of 5/8 inch (15 mm), as shown inthe figure. The enclosing rectangle willthen determine the required number andrequired width of the plywood lamina-tions on each side of the trailing-edgeelement at this radius. A similar proce-dure, for the same number of laminationsand specified blade thicknesses, is fol-lowed at the hub and tip to determine theplywood dimensions on each side of theelement at those radii.
We are now ready to make the patternfor the blade laminations. On a sheet oftough, thin cardboard, draw three concen-tric circles at the hub radius of 1-1/4 inches(31.75 mm), maximum blade-width radiusof 5 inches (127 mm), and tip radius of 8inches (203 mm). Then draw three radii at120 degrees, which will be the trailing-edge elements of the propeller blades.Taking each radius in turn, lay out thelamination widths we have just found, atthe appropriate radial distances from thecenter, along the arcs. To be precise, thesedistances should be laid out along the arcs,but measuring them as chord dimensionshore will provide a lttlc, oYh-~ m,,,i, f-.,_. ,, ./ K. A *.t ~l.s .,-lxllallll IJI
the plywood. Connect these points withsmooth, fair lines, and we then have thepattern for the laminations. Carefully cut

TC,
co
I
Figure 3. Lamination sizing
this out of the cardboard, "saving the line",and check for interblade uniformity bytracing each blade pattern one on top ofthe other on a piece of paper to see if theycoincide.
Use this pattern to lay out the re-quired number of laminations on a sheet of1/2-inch (12.7 mm) marine-grade plywood("marine" because this grade is less likelyto have internal voids than is commonplywood). Be sure to carefully locate thecenter point in each case. The patterns canbe interfingered on the sheet to minimizewaste. Use a sabre or band saw to carefullycut out the laminations-again saving theline-and then carefully drill each for a3/4-inch- (19-mm)-diameter propellershaft.
Figure 4. Lamination pattern
The next step is to make the assemblyplatform, exactly 16 inches (406.4 mm)square. The same 1/2 inch (12.7 mm)plywood may be used, solidly mounted on a
1-1 /2-inch- (38-mm)-thick frame on theunderside, and with a block 1-1/2-inch(38-mm) thick by 4-inch (100-mm) squareunderneath in the center. This should bedrilled carefully for a 3/4-inch (19-mm)dowel, perpendicular to the platform andextending 6 inches (150 mm) above it. Tak-ing each lamination in turn, place it overthe dowel on the platform and, using itsouter edge as a guide, sand off the tip ofeach blade to a uniform 8-inch (203-mm)radius.
Before we assemble the laminationswe must prepare three jigs to insure theirproper positioning while being epoxiedtogether. These jigs are made of thin, stiffcardboard (manila file folders will do).Each consists of a strip of width of thesame number of 1/2-inch (12.7 mm)laminations as the propeller itself, and cutto a step-like profile identical with that ofthe lamination-blanks at the blade tips.
The next step is to make a trialassembly of the laminations on theplatform. Position the helicoidal-surfaceup on the dowel, with each blade havingthe trailing-edge element at the left, andthe laminations rotated clockwise from thetop down to the platform in accordancewith the tip-jig used as a guide on theouter surface of their tips.
When all is in order, remove themfrom the platform, rub the dowel thor-oughly with some wax and cover the plat-form with a sheet of waxed paper cut to fitover the dowel. Now start the epoxied as-sembly, being sure each successive surfaceis completely and uniformly coated, andcarefully positioned with the aid of the jigspinned around the outer surface. Place thesame amount of weights uniformly overeach blade-stack while curing.
A wood rasp is the best tool for theinitial removal of the corners of thelaminations down to the helicoidal surface
of the face of the blades, followed by progres-sively finer wood files. In doing this, note thatall the plywood laminations should be kept asstraight radial lines. Do not deal with the otherside of the blades at this time. With thehelicoidal face of the blades thus roughed out,we can now turn our attention to the outlineshape of the blades themselves.
Figure 5. Blade pattern
To make a pattern for the blade profilewe will fit a piece of thin, tough cardboardto the present fan-shaped surface of theblade face. Since the helicoidal bladesurface is three-dimensional and thecardboard is two-dimensional, it will notlie flat, but the difference is not too greatand the approximation is reasonable.Align a straight edge of the cardboardwith the radial line of the trailing edge,and by cut-and-try, fit the inner edge of thecardboard as close as possible to the curvewhere the blade surface meets the hubcylinder. (Note that the length of this lineequals the length of the hypotenuse atx(hub) = 72°: in our case, 3-1/8 inches(79.4 mm). When this is done, lay the
Human Power 8/4 13
\V.

cardboard flat and spot a series of pointsabout 1/2-inch (12.7 mm) apart along thisline. Using them as centers, and a compasssetting of 3-3/4 inches (95.25 mm), theradius at maximum blade curvature, 5inches; minus hub radius, 1-1/4 inch, drawa series of arcs on the pattern. A smoothcurve across their tops will be the intersec-tion of the cylinder of 5-inch (127-mm)radius with the helicoidal surface. Wemust next lay off the required blade-widthalong this line.
To do this take a strip of paper and layout the required blade width of 4 inches(102 mm) along one edge. Then place thisedge outside, on the convex side of theabove curve, with one endpoint at thestraight trailing edge and tangent to thecurve and, in essence, "roll" this edgealong the curve. This is done by using asharp pencil-point pressed close to theedge of the strip as a pivot, and rotatingthe strip just a bit to a new point oftangency along the curve. Holding thestrip in this new position, the pencil pointis shifted a bit further along the strip, andthe strip again rotated to a new point oftangency. This process is called "tickingoff" the length along the curve, andobviously the closer together the succes-sive pivot points, the more accurate thetransfer of the dimension.
Turning our attention next to the tipof the blade, draw in a circle of 1-1 /4-inch(31.75-mm) diameter tangent to thestraight-line trailing edge and tangent to aline perpendicular to it at its end. A faircurve drawn through the end of the hubintersection, the point of maximum bladewidth, and tangent to the last-mentionedcircle will be the profile of the leading edgeof the blade. This pattern is then cut outand used to trace the outline on eachblade, being careful to keep the straightedge in line with the trailing edge, and thehub cut-out snug against the hub. Use acoping saw to trim the wood to thisprofile.
At this point, we can turn the propel-ler over and rasp off just the corners of thelaminations on the back surface of theblades. Before we can proceed with thefinal shaping of the blade sections, weneed to make one more template: that ofthe blade-section at maximum bladewidth.
This will be an airfoil shape, whoseheights ("ordinates") above the straight-line face of the blade, at ten equally-spacedstations along the blade width or "chord",are shown first as percentages of the maxi-mum blade thickness at this radius (in ourcase, 5/8 inch (16 mm) and 5 inches (127
14 Human Power 8/4
_ ._ ..c - ._ i_,__- _O X hn h I in 1* 0 °
o 4 , us O N O -_ l,*o . .- j + 0 o , t
Or mz c O O t Xw
c3 0r ' c' 3 -'t
C -e-rr r 6 red - (5/B")
( 2 3 4 5 6 7 g 991z O'
- _uo~ (4-CHORD (4') -
/ITRAILIN EDGE LEADNG EDGE--
Figure 6. Blade section @ max. width
mm), respectively, for a chord length of 4inches (162 mm)], and then as inches forour example.
Thus, the next task is to carefully layout this blade-section profile on a sheet oftough, thin cardboard and cut it to shape.The cardboard is then trimmed to the formshown in the figure and mounted perpen-dicularly around the edge of a 10-inch-(254-mm-) diameter disk of 1/2-inch (12.7-mm) plywood, which fits over the 3/4-inch (19-mm) dowel on the assemblyplatform.
With the propeller helicoidal surfaceface down on the platform, use this jig tocheck your profiling of the back of eachblade at the 5-inch (127-mm) radius. Whenthis is done, rasp and file off the rest of theblade surfaces, using the radial lines of theplywood laminations as guides to producea smooth, fair surface based on this keysection. The tip of the blades should betrimmed to about a 1/8-inch (3-mm)radius. The final step is to form the curvedpart of the blade face at the leading edge,and then the surface of the entire propelleris smoothed off with progressively finer
grades of sandpaper.The last step is to paint the propeller
with two coats of epoxy, sanding aftereach to end with a very smooth finish. Besure to epoxy the inside of the bore for thepropeller shaft, too. The propeller can besecured to the propeller shaft by means ofa roll pin through the hub and shaft. Ifdesired, a tail-cone of laminated plywoodcan be epoxied behind the hub.
If the propeller becomes damaged inuse, it may be easily repaired by cuttingout the affected area to reach soundmaterial, and filling in the void to theoriginal profile and contour with a stiffpaste of epoxy and fine sawdust. Asubsequent filing and sanding to theoriginal form completes the repair.
Notes1. According to DeLong, an "average"
person can sustain an output of about 0.225 hp(170 watts) over a one-hour period, with nearmaximum efficiency at a pedal speed of 60 rpm.Assuming a mechanical efficiency of 0.9 and agear ratio of 1:4, this results in 0.2 hp (150 watts)and 240 rpm at the propeller.
Figure 7. Blade section jig
_12�TR
(
I

The Troost B.3.35 model is a high-efficiencypattern with good acceleration characteristics,suitable for an all-weather cruising boat. Asembodied here it differs from the original withthe elimination of the 15-degrees-aft blade rake,and a slightly thicker blade section.
See: Fred DeLong, DeLong's Guide toBicycles and Bicycling, Radnor, PA: ChiltonBook Co., 1978; and L. Troost, "Open Water TestSeries with Modem Propeller Forms",Newcastle, G.B.: Transactions of the North-EastCoast Institution of Naval Architects, 1950-51.For an accessible introduction to the details ofempirical propeller design, see Dave Gerr,Propeller Handbook, Camden, ME, USA:Internat'l Marine Publishing Co., 1989.
2. To give a developed-area ratio of 0.35.The developed-area ratio (DAR) is the true areaof the blade (not the projected area) times thenumber of blades; divided by the disc area ofthe propeller, or R2, where R is the radius of thepropeller.
Philip Thiel4720 7th Ave., NESeattle, WA 98105 USA
Philip Thiel has taught naval architectureat M.I.T., and architecture at Berkeley and theUniversity of Washington in Seattle. Hisinterest is in facilitating the do-it-yourself con-struction of pedal-powered cruising craft.
Ol
Reviews(continued from page 4)
chain friction, windy hills, wheel drag andthe like. There are also articles on cyclinginstrumentation, Shimano pedalingdynamics, cycling-shoe biomechanics, andthe Huffy composite Triton.
Cycling Science is a very valuablejournal, founded and edited by IHPVA'sco-founder Chet Kyle, and a year's sub-scription and associate membership in theCycling Research Association cost $19.97.(P.O. Box 1510, Mount Shasta, CA 96067,USA).
HPV TimesThe first issue of "the Aussie newslet-
ter for exploring the human limits to pedalpower" is, as would be expected, breezyand entertaining as well as informative. Ithas started fairly small, as would beexpected, with two main articles ("Practi-cal vehicles", by editor Wayne Kotzur, and"Building a world-beater" by the UKBluebell team).
Four issues a year cost $10.00 (I don'tknow how that translates to other thanAustralian currency and how overseasmail costs would add to it). Wayne Kotzur,26 Mills St, Hackett, Australia ACT 2602.
-Dave Wilson
Bicycle fairings and efficiencyby Dave Kehoe
Do bicycle fairings really work? Arethey worth buying?
A fairing is a device that redirects airflow around a cyclist. Fairings offer theseadvantages:
* reduced aerodynamic drag, makingthe bicycle faster
* keeping the cyclist warmer in thewinter
* preventing the cyclist's eyes fromtearing on fast descents
* providing a surface for reflectivetape, improving visibility at night
* deflection of branches and otherhazards from the cyclist's face
* slight rain protectionBecause most fairings do the latter
items equally well, I compared differentfairings' effects on my speed.
ContextIHPVA members are familiar with the
speed records of fairing-equipped bicycles.The world record for unfaired, uprightbicycles is about 43mph (19m/s); fairing-equipped recumbent bicycles hold recordsabove 65mph (29m/s). The record forupright, faired bicycles is 51mph (23m/s),held by a Moulton with a fully-enclosedZzipper fairing.
Several hypotheses can be drawnfrom these records. First, the advantage ofa fully-enclosed fairing (8mph, 3.5m/s) isless than the advantage of a recumbent(14mph, 6m/s)). Second, because winddrag is greater at higher speeds, theadvantage of a fully-enclosed fairing atnormal riding speeds (20-25mph, 9-11m/s)) would be considerably less than 8mph.Lastly, the advantage of a partial fairingwould be even less, probably less than1mph at 20-25mph. Perhaps IHPVAmembers have specific data to check thesehypotheses.
Fully-enclosed fairings are heavy,hard to handle in windy conditions, andthe cyclist inside can overheat. I doubt anyof these will be seen on the street.
Partial fairings are lightweight,inexpensive, and don't adversely affecthandling or cooling. Partial fairings havethe greatest potential for boosting thespeed of a street cyclist, and at least half adozen are commercially available. I testedthese.
Test methodologyIn the absence of a wind tunnel,
aerodynamics testing can be done bycoasting down a hill. Three measurementscan be taken: time over a distance, with astopwatch; distance covered beforecoasting to a stop; or maximum speed.
Time is the poorest choice, becausemost time is spent coasting slowly at thetop of the hill while gathering speed. Alarge difference in terminal velocity wouldappear only very small on a stopwatch.
Distance covered is the most sensitive,but you need a hill followed by a long, flatroad without stop signs. I couldn't findany in Portland.
I chose to measure maximum speed,which is a function on my Cateye Microspeedometer. I then chose the steepest hillin Portland (SW 48th at Taylor's Ferry).The results (below) showed that myZzipper fairing increased my speed from43.5mph to 47mph (19 to 21m/s). But theCateye Micro measures maximum speedin whole mph, and the other fairings'effects, if any, were one mph or less, fallingwithin the margin of error.
Also, after 15 tests I was really tired ofclimbing the hill. I decided for my nexttests to use a more sensitive speedometerand a smaller hill. I wanted to do tests atthe speeds I normally ride, 20-25mph, tosee if fairings help in everyday use.
Cateye's old Solar speedometermeasures maximum speed in tenths of amph. I then doubled the wheel size input.In other words, I was supposed to enter1070 for my wheel size, but I entered 2140.Thus, at 25mph, the speedometer shows50mph, and maximum speed is recordedin twentieths of a mph (0.05mph).
Next, I found a smaller hill (SEWoodstock near Reed College), and on awindy January afternoon I did 15 moretests. But the results varied too much, andthe control was at 30mph (13m/s), so Ilooked for a smaller hill.
I found a small hill a few blocks frommy house (SE 31st and Franklin), and did225 coastdowns over five weekendmornings. There was practically no windearly in the morning. Maximum speedswere 21-22mph (9m/s), my normal ridingspeed, and consecutive runs were veryclose in speed-often three or fourconsecutive runs would show exactly thesame speed, say, 21.85mph. The hill was so
Human Power 8/4 15
.

small I could sprint back up it in less thana minute.
VariablesThe first variable to consider was my
position. Could an unconscious change ofposition affect the results? I decided to testhow a conscious change in positionaffected results. Sitting as high as I couldor crouching low on the stem onlychanged my speed 0.33mph to 0.5mph(0.15 to .22m/s) at 21mph, so slight,unconscious differences would have hadminimal effect.
I used two positions on my bike forthese tests. In "drop position" my handswere on the lower part of the bars, touch-ing the brake levers, but my arms werestraight and my elbows locked. This issimilar to the position I usually ride in, inwhich I can produce maximum power. Myhandlebars are 1.5 inches below my seat,and my head and shoulders were alwaysabove the fairings.
I also did tests in the "full tuck"position: crouched as low as I could stillpedal, my chin almost on my speedome-ters. This is how I go down hills, and Ihave to look through the fairing.
Slight, imperceptable winds wouldcertainly affect results. To compensate, Iran each test at least eight times. I then av-eraged the results and calculated thestandard deviation of the mean. Finally Iadded the standard deviation of the meanof the test runs to the standard deviation ofthe mean of the control runs.
National Cycle AeroSportThis is the smallest and lightest of the
handlebar fairings. With a 0.79mph(0.35m/s) increase in speed, it's also themost effective in the drop position. It'seffective because it can be adjusted up ordown, close to or away from the cyclist.Fairings should be as close as possible tothe cyclist's chest, while being far enoughaway to crouch behind for maximumspeed down hills. After eighteen months ofdaily commuting with the AeroSport, I'vefound that crosswinds have virtually noeffect on handling.
At $65, it's the least expensive fairingavailable. It's also very attractive-look-ing-one motorcyclist commented itlooked like a Ninja fairing.
Zzip Designs ZzipperThe Zzipper is the most effective fair-
ing for descending steep hills in a fulltuck-a 0.9mph increase @32mph, and a3.5mph boost @43.5mph (0.4m/s @14m/s,1.5m/s @19m/s). It feels like a little
16 Human Power 8/4
turbocharger.But the Zzipper is less effective than
the AeroSport in the drop position, atslower speeds (+0.46mph @21mph; 0.2m/s@9m/s).
Why is one fairing better in oneposition and another better in anotherposition? The Zzipper's shape conforms toa cyclist's frontal shape in a full tuck, andthe AeroSport conforms to a cyclist'sfrontal shape when sitting up. TheAeroSport can be moved closer to yourbody; the Zzipper is non-adjustable. Tomove the Zzipper closer to you, you haveto buy a shorter stem (using a 3cm shorterstem noticeably improved performance).Even in its farthest position, the AeroSportis closer than the Zzipper.
The Zzipper is lightweight (15 ounces)and unobtrusive. On my commute towork, I have several steep hills, with speedlimits up to 40mph (18m/s). With theZzipper I can climb the hills on theshoulder, and then "take the lane" on thedescent, tucking under it and riding withthe traffic at 40mph.
In cold weather, the Zzipper coversyour hands (unlike the AeroSport), so yourhands stay warm (all the fairings make abig difference in keeping your chest warmin the winter).
I've never overheated in the summerwhen using my Zzipper, and I've used it in110 ° weather. If I ride on top of the bars,I'm above the fairing, and as long as I'mmoving there's enough wind to keep mecool. When hillclimbing out of the saddle,I'm completely above the fairing, so itdoesn't affect me.
Which is better, the AeroSport or theZzipper? After 18 months with the formerand 7 years with the latter, they're veryclose. The Zzipper is slightly better if youhave a lot of fast descents, and the Aero-Sport is slightly better for riding on theflats.
I also tested an experimental Zzipperwith a piece of hot pink Lycra that wrapsaround my butt. Real eye-catching intraffic, but I detected no advantage withthe Lycra at 22mph. It seemed real fastwhen descending hills over 40mph, but Ididn't test it at these speeds.
National Cycle AeroCarrierThis fairing doubles as a handlebar
pack-you can carry about five pounds ofgroceries or gear in it. But the fairing isheavy, and when it's loaded the bikehandles badly. I prefer to use Tailwindfront panniers-I can carry about fourtimes as much gear, and the bike handlesgreat. With an AeroSport and Tailwinds,
my cruising speed is the same as with theAeroCarrier.
The AeroCarrier is also black, so youcan't see through it or crouch behind it.Downhill speeds are slower than tuckingunder the Zzipper or AeroSport. TheAeroCarrier is also less atrractive-looking.It includes a space for a headlight, butneither a Bicycle Lighting Systems 4.5"sealed beam, a Union halogen, nor aSoubitez headlight fit. At $100, I wouldn'trecommend it.
Uni-BMX UniDisksThese are the only fairings allowed by
the USCF. They're spoke covers, and lookjust like disk wheels, except that they cost$35 instead of $800. They're a pain toinstall, and you have to take one side off topump up the tire, and both sides off to truethe wheel. They get kind of soggy in therain. Their increase in speed was small, atall speeds, and was always within themargin of error. Crosswinds aren't really aproblem, but I wouldn't recommendbuying these.
However, many of you are thinking ofbuying disk wheels. Is it worth spendinganother $765 for the disk? The data I'veseen indicates that a rear disk wheel willincrease speed 0.25mph (0.llm/s) at25mph (llm/s). I feel confident in sayingthat the UniDisks will do almost the samething. They're lighter than disk wheels,don't affect handling, and don't give aharsh ride. If I were racing, I'd buyUniDisks before disk wheels.
UniDisks also look really neat. Ibought the "LED" black and white pattern,and I got a lot of comments, especiallyfrom kids. In combination with mytailcone, I heard "Wow! Look at that!" alot. Nobody has ever said that about myZzipper.
Tailcone and small fairingsI fabricated an 18-inch tailcone out of
styrofoam and bolted it to the back of mysaddle. I also put a little piece of balsabehind my head tube, and a larger piecebetween the seat tube and rear tire. Thesehad minimal effects.
In theory, the trailing edge is moreimportant than the leading edge. Tear-drops are blunt in front, but taper in back,controlling turbulence.
But a front fairing helps to make airflow smoothly around the cyclist, produc-ing less turbulence. Without a front fairing,turbulence is generated, and a tailconecan't control turbulence that's alreadybeen created.
I suspect the tailcone had no effect


Fairing/component Speed difference Sum of std. dev. of the means
February 1989: drop position; 21mph (9.39m/s); Cateye Solar - 1/20mph (1/40m/s) incrementsdropped position controlupright position -0.36mph (0.16m/s)full tuck position +0.50mph (0.22m/s)
National Cycle AeroSportNational Cycle AeroCarrierZzip Designs Zzipper
UniBMX UniDiskstailcone (handmade)little fairings (handmade)
Tailwind front panniers (1)Tailwind front panniers (2)Tailwind front panniers (3)panniers loaded with 16 lbs.
Nike cycling jacketNorth Face GoreTex jacket (2)North Face GoreTex jacket (3)North Face GoreTex jacket (4)Lycra jerseyleather jacket
tires at 120psi
tires at 60psitires at 30psi204 coastdowns total
+0.19mph (0.08m/s)+0.23mph (0.lOm/s)
+0.79mph (0.35m/s) +0.36mph (0.16m/s)+0.58mph (0.26m/s) +0.46mph (0.21m/s)+0.46mph (0.21m/s) +0.39mph (0.17m/s)
+0.26mph (0.12m/s) +0.29mph (0.13m/s)+0.09mph (0.04m/s) +0.29mph (0.13m/s)+0.1llmph (0.05m/s) +0.30mph (0.13m/s)
+0.04mph (0.02m/s) +0.32mph (0.14m/s)+0.07mph (0.03m/s) +0.18mph (0.08m/s)-0.12mph (0.05m/s) +0.29mph (0.13m/s)+0.23mph (0.lOm/s) +0.33mph (0.15m/s)
control+0.08mph (0.04m/s) +0.53mph (0.24m/s)-0.26mph (0.12m/s) +0.31mph (0.14m/s)-0.13mph (0.06m/s) +0.48mph (0.21m/s)+0.14mph (0.06m/s) +0.50mph (0.22m/s)+0.07mph (0.03m/s) +0.63mph (0.28m/s)
control (Michelin Hi-Lite Road 700x23mm front,Specialized Touring II 700x28mm rear)-0.13mph (0.06m/s) +.21mph (.002mph/psi) (.09m/s)-0.16mph (0.07m/s) +.21mph (.002mph/psi) (.09m/s)
April 1989: Zzip Designs Zzipper, experimental model with Lycra attachment; 22mph (9.83m/s); Cateye Solar - 1/20mph incrementsdrop position +0.30mph (0.13m/s) +0.20mph (0.09m/s)tucked position +0.40mph (0.18m/s) +0.29mph (0.13m/s)16 coastdowns total
February 1989: 32mph (14m/s); Cateye Solar - 1/20mph increments;full tuck position controlZzipper, full tuck +0.90mph (0.40m/s) +0.25mph (0.llm/s)AeroSport, full tuck -0.17mph (0.08m/s) +0.23mph (0.lOm/s)drop position, no fairing -1.60mph (0.72m/s) +0.45mph (0.20m/s)drop position control (31mph) (13.86m/s)Zzipper, drop position +0.10mph (0.04m/s) +0.80mph (0.36m/s)Aerosport, drop position +0.50mph (0.22m/s) +0.66mph (0.30m/s)21 coastdowns total
January 1989: drop position; 30mph (13m/s); 5-10mph crosswinds; Cateye Solar - 1/20mph increments;National Cycle AeroSport +0.85mph (0.38m/s) +1.62mph (0.72m/s)National Cycle AeroCarrier +0.26mph (0.12m/s) +1.41mph (0.63m/s)Zzip Designs Zzipper +0.10mph (0.04m/s) +1.50mph (0.67m/s)full tuck position +2.03mph (0.91m/s) +2.04mph (0.91m/s)15 coastdowns total
August 1988:full tuck; 43.5mph (19m/s); Cateye Micro - whole mph increments onlyZzip Designs Zzipper +3.5mph (1.6m/s) +0.7mph (0.3m/s)Uni-BMX UniDisks +0.5mph (0.2m/s) +1.4mph (0.6m/s)tailcone (handmade) +l.Omph (0.4m/s) +0.7mph (0.3m/s)little fairings (handmade) +O.Omph +0.7mph (0.3m/s)Tailwind front panniers -2.0mph (0.9m/s) +0.7mph (0.3m/s)15 coastdowns total
mph = miles per hours; m/s = meters per second (mph x 0.447)
18 Human Power 8/4


ing. One other benefit that became increas-ingly appreciated as the new drive wasused was the ability to swing the drive upclose to the rider and easily clear a fouledprop. One afternoon in water heavy withweeds is all it takes to understand howimportant this feature is!
The completed prototype weighed 90Ibm (41 kg) and fulfilled the goal of simple,tool-free assembly. The heaviest compo-nents were the hulls at 30 Ibm (13.6 kg)each. Four hulls could be mounted on a 48-in. (1.2-m) roof rack, and the rest of thecomponents fit in an average-sized cartrunk.
Performance testing showed topspeeds of 10 knots (5 m/s) and sustainablecruising speeds of 4 - 5 knots (2-2.6 m/s).The craft proved stable in choppy waterand tracked well, even in 20-knot (10 m/s)crosswinds.
In November 1988 a Portland marinemanufacturer, Recreation IndustriesCo.(1), purchased Pedal Systems, thecompany originally formed to develop theSeacycle. Development continued atRecreation Industries. Design changeswere made to achieve the following:
*make the Seacycle more suitable foruse as a rental at resorts;
*take advantage of new tooling tosimplify manufacturing;
*enable switching from a single riderto two riders pedaling side-by-side;
·improve aesthetics to enhancecustomer acceptance and perceivedvalue.
The prototype boats, as noted, trackedextremely well. Low-speed turning, how-ever, was sluggish at best. Recreation In-dustries contracted Tom Derrer of Eddy-line Kayaks to design a hull with morerocker and increased buoyancy in the bowand stern sections. Overall buoyancy wasincreased to support two large adults. Theresult was a dramatic improvement inlow-speed turning and a general feeling ofimproved steering responsiveness. Thesometimes unsettling tendency of theearlier boat to bury its bows when riding afollowing wave was also significantlylessened.
Although tests isolating and compar-ing the drag of the different hulls was notdone, overall comparisons of the twoversions indicate hull drag was not signifi-cantly increased.
The Seacycle uses a two-bladed 12-in.(305-mm) prop with an 18-in. (457-mm)pitch, driven by a sealed drive unitincorporating a twisted drive chain with a1:6 ratio. The selection of prop size andpitch was the result of some interesting
20 Human Power 8/4
average drag,pounds
35
(spring scale) 30
25
20
15
10
5-
0
I II _,_,~
II I _ _1 /I I i .. i 1 I
i~~~~~~~~~I I --- fI _
i ' I IA_
/; 1I
I I I
0 1 2 3 4 5 6 7 knots
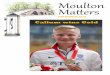
Figure 1. Seacycle drag tests, Willamette River, 11/1/88, including drive unit withoutpropeller, calm slack water, no wind. Weight: Seacycle, 110 pounds; occupant, 180pounds; total, 290 pounds.
trials with various props and gear ratios.Four different props ranging in size
from 8 in. (200 mm) to 17 in. (430 mm)were tried, each with a range of gearratios. All prop/gear combinations weretried on the same boat. The boat waspedaled through a known distance atspecific cadences and times were recorded.
These trials revealed that virtually allof the prop/gear combinations werecapable of driving the Seacycle to 10 knots(5 m/s). Cruising speeds in the 4 to 5-knot(2-2.6-m/s) range were also comparable.Later tests establishing a drag curve for theSeacycle would help explain the results ofthese tests. The tests showed relatively lowamounts of thrust were required to drivethe boat at speeds below 5 knots (2.6 m/s)per hour. From 5 - 7 knots (2.6 - 3.6 m/s),however, drag forces nearly tripled.
This rapid increase in drag forceoverwhelms relatively small differences inpropeller efficiencies causing them to lookmuch the same in our tests.
Overall, the selection of prop andgearing played a smaller role in theSeacycle's performance than we had antici-pated.
This is not to say prop/gear selectionsare not important. They have a largeimpact on how the boat feels when you arepedaling. They determine what cadencescan be comfortably used and how muchglide the boat has when pedaling isstopped. For example, the highest theoreti-cal efficiency comes from using the largest,slowest-turning prop possible. Themoment pedaling stops, however, the propbecomes a surprisingly effective brakeresulting in rapid slowing of the boat.
In our view this was an undesirabletrait. Imagine riding a bicycle that hasextremely poor glide and slows rapidly as
soon as you stop pedaling. It simply makesriding a less pleasurable experiencewhether on land or water. The 12-in. (30.5cm) prop selected represented a compro-mise between propulsive efficiency,pedaling cadence and the ability to let theboat glide.
There were many other designvariables that went into the developmentof the Seacycle. The examples here werechosen to illustrate some of the keyconsiderations in the current design. Oneimportant aspect of developing the Seacyclehas been the process of reconcilingmaximizing performance with a kind of"user friendliness". At critical designpoints, a compromise between maximumperformance and functional utility to aperceived market was sought.
We believe successful compromiseshave been achieved in the Seacycle's blendof performance, safety, ease of use andappearance.
On November 5, 1989, fifth-gradeschool teacher and triathalon athlete KymKucera pedaled a Seacycle non-stop for 25miles (40 km) across the San Pedro(California) channel from Avalon to SealBeach in 5 hours, 25 minutes and 26seconds. Along the way, Kym encounteredchoppy swells up to 4 ft. (1.2 m) high.
Notes1. Recreation Industries Co., Box 68386,Oak Grove, OR 97268 USA.
John Foley14009 N.E. 9th St.Vancouver, WA 98684USA
John Foley's background includes a degree ineconomics from the University of Utah and work as aproduction manager for several companies buildingbicycles and Seacycles. i
__
, _- -.
� i i
i-I I I
i i ._ _ - _ _10: -- ~ ~ --
i