-
Hand Gesture Recognition usingInputOutput Hidden Markov
Models
Sebastien Marcel, Olivier Bernier, JeanEmmanuel Viallet and
Daniel CollobertFrance Telecom CNET2 avenue Pierre Marzin
22307 Lannion, FRANCE
sebastien.marcel, olivier.bernier, jeanemmanuel.viallet,
daniel.collobert @cnet.francetelecom.fr
Abstract
A new hand gesture recognition method based on InputOutput
Hidden Markov Models is presented. This methoddeals with the
dynamic aspects of gestures. Gestures areextracted from a sequence
of video images by tracking theskincolor blobs corresponding to the
hand into a bodyface space centered on the face of the user. Our
goal is torecognize two classes of gestures: deictic and
symbolic.
1. Introduction
Persons detection and analysis is a challenging problemin
computer vision for human computer interaction. LISTEN is a
realtime computer vision system which detectsand tracks a face in a
sequence of video images coming froma camera. In this system, faces
are detected by a modularneural network in skin color zones [3]. In
[5], we developed a gesture based LISTEN system
integratingskincolorblobs, face detection and hand posture
recognition. Handpostures are detected using neural networks in a
bodyfacespace centered on the face of the user. Our goal is to
supply the system with a gesture recognition kernel in order
todetect the intention of the user to execute a command. Thispaper
describe a new approach for hand gesture recognitionbased on
InputOutput Hidden Markov Models.
InputOutput Hidden Markov Models (IOHMM) wereintroduced by
Bengio and Frasconi [1] for learning problems involving sequential
structured data. They have similarities to hidden markov models but
allows to map inputsequences to output sequences. Indeed, for many
trainingproblems, the data are of sequential nature and
multilayerneural networks (MLP) are often not adapted because ofthe
lack of memory mechanism to retain past information.Some neural
networks models allow to capture the temporalrelations by using
times in their connections (Time Delay
Neural Networks) [11]. However, the temporal relations arefixed
a priori by the network architecture and not by thedata themselves
which generally have temporal windows ofvariable input size.
Recurrent neural networks (RNN) model the dynamics of a system
by capturing contextual information fromone observation to another.
The supervised training forRNN is primarily focused on methods of
gradient descent:BackPropagation Through Time [9], Real Time
RecurrentLearning [13] and Local Feedback Recurrent Learning
[7].However, training with gradient descent is difficult whenthe
duration of the temporal dependencies is large. Previous work on
alternative training algorithms [2], such asInput/Output Hidden
Markov Models, suggest that the rootof the problem lies in the
essentially discrete nature of theprocess of storing contextual
information for an indefiniteamount of time.
2. Image Processing
We are working on image sequence in CIF format(384x288 pixels).
In such images, we are interested in facedetection and hand gesture
recognition. Consequently, wemust segment faces and hands from the
image.
2.1. Face and hand segmentation
We filter the image using a fast lookup indexing table ofskin
color pixels in YUV color space. After filtering, skincolor pixels
(Figure 1) are gathered into blobs [14]. Blobs(Figure 2) are
statistical objects based on the location (x,y)and the colorimetry
(Y,U,V) of the skin color pixels in orderto determine homogeneous
areas. A skin color pixel belongto the blob which have the same
location and colorimetrycomponent.
-
! #" $!
%&('$"! ) +*-,! ,. /*01
12"312,4" ! 4
2.2. Extracting gestures
We map over the user a bodyface space based on adiscrete space
for hand location [6] centered on the faceof the user as detected
by LISTEN. The bodyface spaceis built using an anthropometric body
model expressed asa function of the total height of the user,
itself calculatedfrom the face height. Blobs are tracked into the
bodyfacespace. The 2D trajectory of the handblob1 during a
gestureis called a gesture path.
3. Hand Gesture Recognition
Numerous method for hand gesture recognition havebeen proposed:
neural networks (NN), such as recurrentmodels [8], hidden markov
models (HMM)[10] or gestureeigenspaces [12]. On one hand, HMM allow
to closelycompute the probability that observations could be
generated by the model. On the other hand, RNN achieve
goodclassification performance by capturing the temporal relations
from one observation to another. However, they
1center of gravity of the blob corresponding to the hand
cannot compute the likelihood of observation. In this paper, we
use IOHMM which have HMM properties and NNdiscrimination
efficiency.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Y
X
DEICTIC
SYMBOLIC
65&7# 1984, ! 6"
, 14;:"
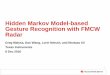
Our goal is to recognize two classes of gestures: deictic and
symbolic gestures (Figure 3). Deictic gestures arepointing
movements towards the left (right) of the bodyfacespace and
symbolic gestures are intended to execute commands (grasp, clic,
rotate) on the left (right) of shoulders.A video corpus was built
using several persons executingseveral times these two classes of
gestures. A database ofgesture paths was obtained by manual video
indexing andautomatic blob tracking.
4. InputOutput Hidden Markov Models
The aim of IOHMM is to propagate, backward in time,targets in a
discrete space of states, rather than the derivativesof the errors,
as in NN. The training is simplified and hasonly to learn the
outputs and the next state defining thedynamic behavior.
4.1. Architecture and modeling
The architecture of IOHMM consists of a set of states ? ,where
each state is associated to a state neural network @Aand to an
output neural network B)A where the input vectorC(D is the input at
time E . A state network @GF has a number ofoutputs equal to the
number of states. Each of these outputsgives the probabilityof
transition from state H to a new state.
4.2. Modeling
Let CJI1 KC
1 L>L>LC
I
be the input sequence (observationsequence) and M I1 K M 1
L>L>L M I the output sequence.
-
C is the input vector ( C IR ) with the input vectorsize and M
is the output vector ( M IR ) with the outputvector size. is the
number of input/output sequencesand is the length of the observed
sequence. The setof input/output sequences is defined by
K
K
C
I
1
M
I
1
, with
K
1L>L>L
. The IOHMM model isdescribed as follows:
?
D : state of the model at time E where ? D , K
1L>L>L
and
is the number of states of the model, : set of successor states
for state , ! ," : set of final states, "# .
The dynamic of the model is defined by :
?
D
K%$
?
D&
1
CD
M
D
K('
?
D
CD
(1))
F is the set of parameters of the state network @GF ( *HK
1L>L>L
), where +-F-, DK
I/. 0
1F-,D
L>L>L
021
F-,
D43 is the output ofthe state network @/F at time E , with the
relation 05 F-, D
K
6
?
D
K
87?
D&
1K
H
CD
, i.e. the probability of transitionfrom state H to state , with
9
1
;:
102
F-,
D
K
1. < F is the setof parameters of output network B F ( *H
K
1L>L>L
), where=
F-,
D is the output of the output network B F at time E , withthe
relation > F-, D
K
6
@?
,
D
7?
D
K
H
CD
. Let us introducethe following variables in the model:AD :
memory of the system at time E , AD CB
1
:
A
D
K
1
D
F
:
1
E
F-,
D&
1 + F-,D for EGF
K
0
whereE
F-,
D
K
6
?
D
K
HH7
C
D
1
and A 0 is randomlychosen with 9
1
F
:
1E
F-, 0K
1,=!I
D : global output of the system at time E , =8ID IR is:
=
I
D
K
1
D
F
:
1
E
F-,
D=
F-,
D (2)
with the relation =JIDK
6
M
D
7
C
D
1
, i.e. the probability to have the expected output M D knowing
the inputsequence C
D
1,
$LK
M
D ; =M , D
: probabilitydensity function (pdf) of outputs where
$NK
M
D ; =M , D
K
6
M
D
7?
D
K
CD
, i.e. theprobability to have the expected output M D knowing
thecurrent input vector C D and the current state ? D .
We formulate the problem of the training as a problemof
maximization of the probability function of the set ofparameters of
the model on the set of training sequences.The likelihood of
input/output sequences (Equation 3)
is, as in HMM, the probability that a finite observationsequence
could be generated by the IOHMM.
O
K
6
;
7
K
P
Q
R
:
16
M
I
1 7C
I
1
(3)
where is the parameter vector given by the concatenationof
SL< FT et S
)
FUT . We introduce the EM algorithm as aiterative method to
estimate the maximum of the likelihood.
4.3. The EM algorithm
The goal of the EM algorithm (Expectation Maximization) [4] is
to maximize the function of loglikelihood(Equation 4) on the
parameters of the model given thedata . V
K
V
W
'
O
(4)
To simplify this problem, the EM assumption is to introduce a
new set of parameters X known as the hidden set ofparameters. Thus,
we obtain a new set of data ZY
K
X
,
called the complete set of the data, of loglikelihood
function
V
GY
. However, this function cannot be maximizeddirectly because X
is unknown. It was already shown[4] that the iterative estimation
of the auxiliary function[ (Equation 5), using the parameters ^ of
the previousiteration, maximizes
V
6Y
.
[
^
K]\_^
.
V
GY
7`
^3 (5)
Computing[
corresponds to supplement the missingdata by using knowledge of
the observed data and of theprevious parameters. The EM algorithm
is the following: For a
K
1L>L>Lb
, whereb
is a local maxima
Estimation step: computation of[
c d&
1 e Kf\_^
.
V
GY
7 `
c d&
1 e 3
Maximization step: c d e
K
arg max[
c d&
1 e
Analytical maximization is done by cancelling the
partialderivatives gih c ,
^ eg
K 0.
4.4. Training IOHMM using EM
Let be the set of states sequences, K
;j
I
1
with
K
1L>L>L
, the complete data set is:
GY
K
k
K
C
I
1
M
I
1
j
I
1 l
K
1L>L>L
-
and the likelihood on 6Y is:O
GY
K
6
;k
7
K
P
Q
R
:
1
6
M
I
1
j
I
1
7
C
I
1
For convenience, we choose to omit the
variable inorder to simplify the notation. Furthermore, the
conditionaldependency of the variables of the system (Equation 1)
allows us to write the above likelihood as:
O
GY
K
P
Q
R
:
1
I
Q
D@:
1
6
M
D
?
D
7?
D&
1
CD
Let us introduce the variable D
,
D
K
1 : ? DK
0 : ? D FK
the loglikelihood is then:V
GY
K
V
W
'
O
GY
K
P
D
R
:
1
I
D
D@:
1
1
D
;:
1
,
D
V
W
'
6
M
D
7?
D
K
CD
1
D
F
:
1
,
D
F-,
D&
1
V
W
'
6
?
D
K
87?
D&
1K
H
CD
However, the set of states sequences is unknown, andV
GY
cannot be maximize directly. The auxiliary function
[
must be computed (Equation 5):[
^
Kf\
.
V
Y
GY
7
k ^3
K
P
D
R
:
1
I
D
D@:
1
1
D
;:
1
^E
,
D
V
W
' $LK
M
D ; = ,
D
1
D
F
:
1
^
F-,
D
V
W
'
02
F-,
D
where ^ F-, D is computed using ^ as follows:
F-,
D
K
6
?
D
K
?
D&
1K
H 7
C
I
1
M
I
1
K
F-,
D&
102
F-,
D
,
D
$LK
M
D ; = ,
D
O
and OK
6
M
I
1 7CJI
1
,
,
D and , D are computed (see[1] for details) using equations (6)
and (7).
,
D
K
6
M
D
1
?
D
K
87
C
D
1
K $LK
M
D ; = ,
D
1
D
F
:
1
02
F-,
D
F-,
D&
1 (6)
,
D
K
6
M
I
D
1 7?D
K
C
I
D
K
1
D
F
:
1$LK
M
D
1; = F-, D 1
F-,
D
10
F
,
D
1 (7)
Then O is given by:O
K
6
M
I
1 7C
I
1
K
D
6
M
I
1
?
I
K
87
C
I
1
K
D
,
I
The learning algorithm is as follow: for each sequence
CJI
1
M
I
1
and for each state HK
1L>L>L
, we compute + F-, D ,=
F-,
D
, then
,
D
,
,
D and F-, D ( * F ). Then we adjust)
F parameters of the state networks @GF to maximize theequation
(8).
P
D
R
:
1
I
D
D@:
1
1
D
;:
1
1
D
F
:
1
^
F-,
D
V
W
'
02
F-,
D (8)
We also adjust < F parameters of the output networks B Fto
maximize the equation (9).
P
D
R
:
1
I
D
D@:
1
1
D
;:
1
^E
,
D
V
W
' $LK
M
D ; = ,
D
(9)
Let Fd
be the set of parameters of state networks @GF .The partial
derivatives of the equation (8) are given by:
[
^
F
d
K
P
D
R
:
1
I
D
D@:
1
D
^ F-,
D
102
F-,
D
02
F-,
D
F
d
where the partial derivatives g
g
are computed using classic backpropagation in the state network
@GF .
Let d
be the set of parameters of output network B .The partial
derivatives of the equation (9) are given by:
[
^
d
K
P
D
R
:
1
I
D
D@:
1
^E
,
D
V
W
'/$LK
M
D ; = ,
D
d
K
P
D
R
:
1
I
D
D@:
1
^E
,
D
D
F
:
1
V
W
'/$LK
M
D ; = ,
D
> F
,
D
> F
,
D
d
As before, partial derivative g
g
can be computedby backpropagation in output networks B . The
pdf$LK
M
D ; =M , D
depends on the problem.
4.5. Applying IOHMM to gesture recognition
We want to discriminate a deictic gesture from a
symbolicgesture. Gesture paths are sequences of [ D ? D ? D ]
observations, where ?! ,
?
D are the coordinate at time E and D isthe sampling interval.
Therefore, the input size is
K
3,and the output size
K
1. We choose to learn?
1K
1 asoutput for deictic gestures and
?
1K
0 as output for symbolicgestures.
-
Furthermore, we assume that the pdf of the model is$LK
M
D ; =M , D
K
& 12 9
1 c
@&
e
2, i.e. an exponential
Mean Square Error. Then, partial derivatives of the equation(9)
becomes:
[
^
d
K
P
D
R
:
1
I
D
D@:
1
^E
,
D
D
F
:
1
@?
F-,
D
> F
,
D
> F
,
D
d
Our gesture database (Table 1) is divided into three subsets:
the learning set, the validation set and the test set. Thelearning
set is used for training the IOHMM, the validation set is used to
tune the model and the test set is usedto evaluate the performance.
Table 1 indicates in the firstcolumn the number of sequences. The
second, third andfourth columns respectively indicates the minimum
numberof observations, the mean number of observations and
themaximum number of observations.
&,! 7#
-
Unfortunately, untrained gestures, i.e. the deictic andsymbolic
retractation gestures, cannot be classified neitherby the output of
the MLP based on interpolated gestures norby the global output of
the IOHMM (Figure 5).
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
0.12
0 10 20 30 40 50 60 70 80 90 100
TRAINED
UNTRAINED
>! 1 +*
( 11 (# 1=
Nevertheless, it is possible to estimate for the IOHMM, a
likelihood cue that can be used to stand out trained gesturesfrom
untrained gestures (Figure 6). This likelihood cuecan be computed
in a HMM way by adding to each state ofthe model an observation
probability of the input C-D .
6. Conclusion
A new hand gesture recognition method based on Input/Output
Hidden Markov Models is presented. IOHMMdeal with the dynamic
aspects of gestures. They have Hidden Markov Models properties and
Neural Networks discrimination efficiency. When trained gestures
are encountered the classification is as powerful as the neural
networkused. The IOHMM use the current observation only andnot a
temporal windows fixed a priori. Furthermore, whenuntrained
gestures are encountered, the likelihood cue ismore discriminant
than the global output.
Future work is in progress to integrate the hand
gesturerecognition based on IOHMM into the LISTEN based system. The
full system will integrate face detection, handposture recognition
and hand gesture recognition.
References
[1] Y. Bengio and P. Frasconi. An Input/Output HMM architecture.
In Advances in Neural Information ProcessingSystems,page 427434,
1995.
[2] Y. Bengio, P. Simard, and P. Frasconi. Learning
longtermdependencies with gradient descent is difficult. IEEE
Transactions on Neural Networks, 5(2):157166, 1994.
[3] M. Collobert, R. Feraud, G. LeTourneur, O. Bernier, J.
Viallet, Y. Mahieux, and D. Collobert. LISTEN: A system forlocating
and tracking individual speakers. In 2nd Int. Conf.on Automatic
Face and Gesture Recognition, page 283288,1996.
[4] A. Dempster, N. Laird, and D. Rubin. Maximumlikelihoodfrom
incomplete data via the EM algorithm. Journal of RoyalStatistical
Society, 39:1938, 1977.
[5] S. Marcel. Hand posture recognition in a bodyface
centeredspace. In CHI99, page 302303, 1999. Extended Abstracts.
[6] D. McNeill. Hand and Mind: What gestures reveal
aboutthought. Chicago Press, 1992.
[7] M. Mozer. A focused backpropagation algorithm for temporal
pattern recognition. Complex Systems, 3:349381,1989.
[8] K. Murakami and H. Taguchi. Gesture recognition
usingrecurrent neural networks. In Conference on Human Interaction,
page 237242, 1991.
[9] D. Rumelhart, G. Hinton, and R. Williams. Learning internal
representations by error propagation. In Parallel Distributed
Processing, volume 1, page 318362. MIT Press,Cambridge, 1986.
[10] A. Starner and T. Pentland. Visual recognition of
AmericanSign Language using Hidden Markov Models. In Int. Conf.on
Automatic Face and Gesture Recognition, page 189194,1995.
[11] A. Waibel, T. Hanazawa, H. G., K. Shikano, and K.
Lang.Phoneme recognition using timedelay neural netwoks.IEEE
transactions on Acoustics, Speech and Signal Processing, 37:328339,
1989.
[12] T. Watanabe and M. Yachida. Realtime gesture
recognitionusing eigenspace from multi input image sequences. In
Int.Conf. on Automatic Face and Gesture Recognition, page428433,
1998.
[13] R. Williams and D. Zipser. A learning algorithm for
continually running fully recurrent neural networks.
NeuralComputation, 1:270280, 1989.
[14] C. Wren, A. Azarbayejani, T. Darrell, and A.
Pentland.Pfinder: Realtime tracking of the human body. In
IEEETransactions on Pattern Analysis and Machine
Intelligence,volume 19 of 7, page 780785, 1997.