Embed Size (px)
Citation preview

GPS Short-Distance Baseline Estimationfrom RINEX Files under Matlab
EnvironmentWen Zhang, National University of Defense Technology, China, and University of Leeds, UK
Mounir Ghogho, University of Leeds, UKL. Enrique Aguado, Advanced Digital Institute, UK
BIOGRAPHY
Wen Zhang received a B.Sc. degree in Physics fromCentral China Normal University (CCNU), Wuhan,China in July 2003, and an M.S. degree in Opti-cal Engineering from National University of DefenseTechnology (NUDT), Changsha, China, in Decem-ber 2005. Now she is a Joint-training doctoratecandidate at both the University of Leeds, UK andNUDT, under the supervision of Professor MounirGhogho, Dr. Luis Enrique Aguado and ProfessorBolong Gao. Her research currently focuses on theGPS/INS Integration.
Prof. Mounir Ghogho received the M.S. degree in1993 and the PhD degree in 1997, both in Signaland Image Processing from the National Polytech-nic Institute (INP), Toulouse, France. He was an EP-SRC Research Fellow with the University of Strath-clyde, Glasgow, from September 1997 to November2001. Since December 2001, he has been a facultymember with the school of Electronic and Electri-cal Engineering at the University of Leeds, wherehe is currently a Professor. His research interestsare in signal processing for communications and net-working. He is currently an Associate Editor of theIEEE TRANSACTIONS ON SIGNAL PROCESS-ING and a member of the IEEE SPCOM and SPTMTechnical Committees.
Dr. Luis Enrique Aguado has got over 15 yearsof research and project management experience inindustrial and academic environments in the areasof satellite navigation and wireless communications.He is Sector Manager for the DSP Research Group
at the Advanced Digital Institute in Bingley, UK. Be-fore that he was Senior Research Fellow at the Uni-versity of Leeds for 10 years, being Acting Direc-tor of the CAA Institute of Satellite Navigation from2006 to 2007. Dr. Aguado has a PhD in ElectricalEngineering from University of Manchester (UK)and a B.S., also in Electrical Engineering, from Uni-versity of Mondragon (Spain).
ABSTRACT
Although there are many powerful commercial soft-wares for the baseline estimation, a new code withspecial functions has been developed using the Mat-lab software for the higher efficiency of the researchwork. With this code, the epoch-by-epoch short-distance baseline estimation has been made with theRINEX navigation and observation files obtainedfrom two GPS receivers. To make the estimationprecisely, the RINEX files have been post processedusing four methods, respectively, with comparison.The first one is using simultaneous observations ofC/A pseudoranges to compute the epoch-by-epochpositions of the two GPS receivers, and then thebaseline between the two antennas is estimated bysubtracting one’s position from another. The stan-dard deviation of baseline length is0.099m and themean value error is2.5% compared with the stan-dard value. The second one is also using simultane-ous observations of C/A pseudoranges, but we onlycompute the positions of the master receiver and thenthe baseline is estimated from the epoch-by-epochdifference of pseudoranges between master receiverand rover receiver. The standard deviation of base-
1

line length is0.157m and the mean value error is6.4% compared with the standard value. The thirdmethod is using the direct results from an onlineprecise point positioning (PPP) software. The stan-dard deviation of baseline length is0.148m and themean value error is18.1% compared with the stan-dard value. The fourth one is using simultaneousobservations of carrier phase of master receiver androver receiver. The standard deviation of the base-line length is0.004m, implying the best estimationof the four methods used here. The estimated base-line length is1.345m which is set as the distancebetween the two fixed GPS antennas in this experi-ment.
1 INTRODUCTION
The Global Positioning System (GPS) is widely usedfor civilian navigation, positioning, surveying andscientific applications. Although originally devel-oped as a means for navigation, GPS has since beenshown to be an abundant source of baseline infor-mation as well. Using sub-centimeter precision ofGPS carrier phase, a receiver can determine therelative positions and baselines of multiple anten-nas mounted to vehicles or platforms so accurately.Baseline determination is very useful in many appli-cations, such as attitude determination. A Baselineconsists of a pair of stations for which simultaneousGPS data have been collected. Mathematically ex-pressed as a vector of coordinate differences betweenthe two stations, or an expression of the coordinatesof one station with respect to the other (whose coor-dinates are assumed known, and is typically referredto as a ”Base” or ”Reference” Station).
RINEX, stands for Receiver INdependent EXchangeformat, is a set of standard definitions and formatsto promote the free exchange of GPS data and fa-cilities the use of data from any GPS receiver withany post processing software package. And it is de-signed to evolve over time, adapting to new types ofmeasurements and new satellite navigation systems.The format includes definitions of four fundamentalGPS observations: GPS time, carrier phase, Dopplerfrequency, and pseudorange. The two main RINEXfiles are Observation Data File (O-file) and Naviga-tion Message File (N-file). This kind of format al-lows the user to post process the received data (usu-ally with other data unknown to the original receiver,such as better models of the atmospheric conditions
at time of measurement) to produce a more accuratesolution. The most common version at present is2.10 [1], which enables storage of measured pseudo-range, carrier-phase and Doppler systems for GPS,GLONASS, EGNOS and WAAS, simultaneously.RINEX version 3.00 [2] is on the march and is ca-pable of new measurements from advanced GPS orGalileo systems.
The data post processing environment chosen in thispaper is Matlab. The Matlab computing environmenthas become a popular way to perform complex ma-trix calculations, and to produce sophisticated graph-ics output in a relatively friendly easy manner. Largecollections of Matlab scripts are now available for awide variety of applications and are often used foruniversity courses.
The final output of a navigation receiver is usuallyits position, speed or other related physical quan-tities. However, the calculation of these quantitiesare based on a series of measurements from fouror more satellite constellations. Although positionand velocity are easily obtained in real time for al-most all hardware receivers, in many cases it is in-teresting to store intermediate measures for later use.RINEX is the standard format that allows the man-agement and disposal of the measures generated by areceiver, as well as their offline processing by a mul-titude of applications, whatever the manufacturer ofboth the receiver and the computer application. Herein this paper, we perform GPS kinetic short-distancebaseline estimation from two antennas with the cor-responding RINEX O-file and N-file under Matlabenvironment. Pseudorange and carrier phase obser-vations are used for positioning and baseline calcula-tion. The computation is repeated over nearly 2000continuous epochs. Each epoch gives out a baselineestimation result. Graphical results based on the dataare illustrated. All the codes are written under Mat-lab environment.
In this paper, Matlab codes are used to perform GPSshort-distance baseline estimation from RINEX filesunder Matlab environment. In Section 2, the fun-damental principle of baseline estimation from twoantennas is introduced. In Section 3, the RINEX fileand the definition of the GPS observations, includingTime, Pseudorange, Phase, Doppler, are described.And two examples of snapshots of GPS Observa-tion Data File and GPS Navigation Message File are
2

illustrated. In Section 4, the system flow chart ofthe experiment is described. In Section 5, results ofdata processing and compare of the four methods areshowed and plotted. In Section 6, summary and con-clusion are provided.
2 THE FUNDAMENTALPRINCIPLE OF BASELINEESTIMATION (BASELINEMODEL)
The ionospheric-free combinations of dual-frequency GPS pseudorangeρ and carrier-phaseobservationsϕ are related to user position, clock,troposphere and ambiguity parameters according tothe following simplified observation equations [3]:
lρ(t) = r(t)+c·(dti(t)−dtp(t))+Tr(t)+ερ(t) (1)
lϕ(t) = r(t)+c·(dti(t)−dtp(t))+Tr(t)+λ·N+εϕ(t)(2)
wherelρ(t) is the ionosphere-free combination ofL1andL2 pseudoranges using the following equation[4]:
lρ(t) =ρL2(t) − (fL1/fL2) · ρL1(t)
1 − fL1/fL2
(3)
lϕ(t) is the ionosphere-free combination ofL1 andL2 carrier phase using the following equation:
lϕ(t) =ϕL2(t) · λ2 − (fL1/fL2) · ϕL1(t) · λ1
1 − fL1/fL2
(4)r(t) is the geometry distance from receiveri to satel-lite p; dti(t) is clock error of receiveri; dtp(t) isclock error of satellitep; Tr(t) is tropospheric de-lay; fL1 is the frequency of GPS signalL1; fL2 isthe frequency of GPS signalL2; ρL1(t) is the pseu-dorange observable ofL1; ρL2(t) is the pseudorangeobservable ofL2; ϕL1(t) is the carrier phase observ-able ofL1; ϕL2(t) is the carrier phase observable ofL2; t is the time epoch;c is the speed of light;i is thesubscript for receiver identifier;p is the superscriptfor satellite identifier.
The fundamental principle of baseline determinationwith double antennas is showed in Figure 1. Themaster antenna is marked as identifieri and roverantennaj. The GPS satellite is so distant relative tothe antenna separation that arriving wavefronts can
be considered as effectively planar. A signal travel-ing at the speed of light arrives at the antenna closerto the satellite slightly before reaching the other. Bymeasuring the difference in carrier phase betweenthe antennas, a receiver can determine the relativerange between the pair of antennas [5].
Figure 1: Baseline geometry
Referring to Figure 1, the measured differentiallength, lpij , measured in meters, is proportional tothe projection of the baseline vectorxij into the lineof sight (LOS) unit vector to the satellites,sp
ij , forbaselineij and satellitep. However, as implied inthe figure, the GPS receiver initially only measuresthe fractional part of the differential phase. The in-teger componentNp
ij must be resolved through in-dependent means before the differential phase mea-surement can be interpreted as a differential rangemeasurement. The resulting expression is then
lpij(t) = spij(t)·xij(t)+dtij(t)−Np
ij(t)+εpij(t) (5)
whereεpij is additive, time-correlated measurement
noise from the relative ranging error sources.dtijis the clock error difference between receiveri andreceiverj. Note that in this paper as a matter of con-vention, the integerNp
ij is treated as a constant aslong as continuous lock is maintained on that com-bination of satellite and baseline. In other words,the initial allocation of integer component betweenNp
ij andlpij is arbitrary. As the satellite changes withtime, it is assumed that the receiver tracking loopskeep automatic track of integer wrap-arounds in thelpij measurements as they occur, for example, theytrack the total change inlpij , including the integerpart. Thus, the only ambiguity is the initial valueof the integerNp
ij .
3

If we do double difference of the observable betweenboth receiversi, j and satellitesp, q, then we canhave
lpqij (t) = spq
ij (t) · xij(t) − Npqij (t) + εpq
ij (t) (6)
We can notice that the receiver clock error is elimi-nated. But we still have to solve out the double dif-ference integerNpq
ij .
Based on the above baseline model, some combina-tions can be formed as to eliminate the common pa-rameters in one epoch or between epochs. If we dodifference between epochm and epochn, we canhave
lpqij (m) − lpq
ij (n) = spqij (m) · xij(m)
−spqij (n) · xij(n) + εpq
ij (m) − εpqij (n)
(7)
In this time difference model, there are no ambiguityparameters left as the ambiguity is a constant overtime as long as there are no cycle slips or loss oflock.
For simplicity, we rewrite Equation (7) as:
∆ε = ∆l − ∆s · x (8)
where∆ε = εpq
ij (m) − εpqij (n) (9)
∆l = lpqij (m) − lpq
ij (n) (10)
∆s = (spqij1(m) spq
ij2(m) spqij3(m)
−spqij1(n) − spq
ij2(n) − spqij3(n))
(11)
x = (xpqij1(m) xpq
ij2(m) xpqij3(m)
xpqij1(n) xpq
ij2(n) xpqij3(n))T
(12)
Till now we can use least-quare method to estimatethe baseline using Equation (8). Before we do base-line calculation, we need know some basic knowl-edge of how to calculate satellite position [6] as wellas receiver position [7] [8] [9].
3 RINEX FILE: DEFINITIONOF THE GPS OBSERVA-TIONS
GPS observations include four fundamental quan-tities that need to be defined: Time, Pseudorange,
Phase, and Doppler [1]. Here are two examples ofsnapshot for GPS Observation Data File (illustratedin Figure 2) and GPS Navigation Message File (il-lustrated in Figure 3).
3.1 Time
The time of the measurement is the receiver time ofthe received signals. It is identical for the phase andrange measurements and is identical for all satellitesobserved at that epoch. It is expressed in GPS time(not Universal Time).
3.2 Pseudorange
The pseudorangeρ is the distance from the receiverantenna to the satellite antenna including receiverand satellite clock offsets (and other biases, such asatmospheric delays):
ρ = r + c · (dti − dtp + dt) (13)
wherer is the geometry distance from satellite to re-ceiver,dti is the receiver clock offset,dtp is the satel-lite clock offset,dt is other bias, andc is the speedof propagation. So that the pseudorange reflects theactual behavior of the receiver and satellite clocks. Itis stored in units of meters.
3.3 Phase
The phase is the carrier phase measured in wholecycles at bothL1 and L2. The half-cycles mea-sured by squaring-type receivers must be convertedto whole cycles and flagged by the wavelength factorin the header section. The phase changes in the samesense as the range. The phase observations betweenepochs must be connected by including the integernumber of cycles. The phase observations will notcontain any systematic drifts from intentional offsetsof the reference oscillators.
The observations are not corrected for external ef-fects like atmospheric refraction, satellite clock off-sets, etc. If the receiver or the converter software ad-justs the measurements using the real-time-derivedreceiver clock offsetsdti, the consistency of the 3quantities (phase pseudorange and epoch) must bemaintained, i.e. the receiver clock correction shouldbe applied to all 3 observations:
4

Figure 2: Example of GPS Observation Data File
Figure 3: Example of GPS navigation message file
5

tcorr = ti − dti (14)
ρcorr = ρi − c · dti (15)
pcorr = pi − f · dti (16)
whereti is the real time,dti is the receiver clockoffset,ρi is the real time pseudorange,pi is the realtime phase,tcorr is the corrected time,ρcorr is thecorrected pseudorange,pcorr is the corrected phase,f is the carrier frequency, andc is the speed of prop-agation.
3.4 Doppler
Doppler is the∆f expressed in Equation (2) in ref-erence [7]. The sign of the Doppler shift as addi-tional observable is defined as usual: Positive for ap-proaching satellites, while negative for the recedingsatellites.
4 EXPERIMENT ARRANGE-MENT
The system flow chart of the experiment is shownin Figure 4. The master antenna and the rover an-tenna are installed in the top of the van and they areseparated in a certain fixed distance. Two receiversconnected to the two antennas are called master re-ceiver and rover receiver separately. The receiversprocess and record experimental data in binary for-mat files which can be converted to RINEX files us-ing a specific software. Then the RINEX files of themaster and rover receivers are processed by Matlabusing four different methods to give the outputs ofbaseline information which we need, as well as otheradditional information such as position and velocity.
5 RESULTS OF DATA PRO-CESSING
Here are the results of data processing using fourdifferent methods to process the RINEX files ofboth master and rover receivers to obtain the base-line length between them. The experimental binarydata sets are collected using two Leica 500 GPSReceivers simultaneously. And RINEX observationand navigation files can be obtained from the binary
Figure 4: System chart
−1.179 −1.1785 −1.178 −1.1775 −1.177 −1.176552.9353
52.9354
52.9355
52.9356
52.9357
52.9358
52.9359
52.936
52.9361
52.9362
52.9363
Longitude (degree)
Latit
ude
(deg
ree)
Master and Rover Receiver Position over 1871 Epochs
MasterRover
Figure 5: Master and Rover Receivers TrajectoriesUsing Method A
6

0 500 1000 1500 2000−1.5
−1
−0.5
0
0.5
1
1.5
Epochs [0.2 s interval]
Bas
elin
e V
ecto
r (m
)
Baseline Vector over 1871 Epochs
XYZ
Figure 6: Baseline Components Using Method A
0 500 1000 1500 20001
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
Epochs [0.2 s interval]
Bas
elin
e le
ngth
(m
)
Baseline Length over 1871 Epochs
Figure 7: Baseline Length Using Method A
format files using a specific software. The base-line computation is then repeated over nearly 2000epochs of0.2s interval under Matlab environment.
5.1 Results of method A
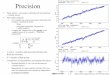
Method A uses simultaneous observation of C/Apseudoranges of the two GPS receivers to computethe epoch-by-epoch positions, and then the baselinebetween the two antennas is estimated by subtract-ing one’s position from another. Figure 5 showsthe master and rover receivers trajectories using thismethod. Figure 6 shows the baselineX, Y, Z com-ponents. And Figure 7 shows the baseline length ac-cording to the time. The average baseline length is1.378m. The variation of the baseline length is be-tween−0.357m and0.322m and the standard devi-ation is0.099m.
5.2 Results of method B
The second method is also using simultaneous ob-servations of C/A pseudoranges, but we only com-pute the positions of the master receiver and thenthe baseline is estimated from the epoch-by-epochdifference of pseudoranges between master receiverand rover receiver. Figure 8 shows the master re-ceivers trajectory. Figure 9 shows the baselineX, Y, Z components using this method. And Figure10 shows the baseline length according to the time.The average baseline length is1.431m. The varia-tion of the baseline length is between−0.447m and0.696m and the standard deviation is0.157m.
−1.179 −1.1785 −1.178 −1.1775 −1.177 −1.176552.9353
52.9354
52.9355
52.9356
52.9357
52.9358
52.9359
52.936
52.9361
52.9362
52.9363
Longitude (degree)
Latit
ude
(deg
ree)
Master Receiver Trajectory over 1871 Epochs
Figure 8: Master Receiver Trajectory Using MethodB
7

0 500 1000 1500 2000−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Baseline Components over 1871 Epochs
Epochs [0.2 s interval]
Bas
elin
e X
, Y, Z
Com
pone
nts
[m]
XYZ
Figure 9: Baseline Vectors Using Method B
0 500 1000 1500 20000.8
1
1.2
1.4
1.6
1.8
2
2.2
Epochs [0.2 s interval]
Bas
elin
e le
ngth
(m
)
Baseline Length over 1871 Epochs
Figure 10: Baseline Length Using Method B
5.3 Results of method C
The third method is using the direct results from anonline precise point positioning (PPP) software. TheRINEX files can be submitted to the website and thereturning results are the positions of master and roverreceivers. Figure 11 shows the master and roverreceivers trajectories using this method. Figure 12shows the baselineX, Y, Z components. And Figure13 shows the baseline length according to the time.The average baseline length is1.588m. The varia-tion of the baseline length is between−0.361m and0.257m and the standard deviation is0.148m.
−1.179 −1.1785 −1.178 −1.1775 −1.177 −1.176552.9353
52.9354
52.9355
52.9356
52.9357
52.9358
52.9359
52.936
52.9361
Longitude (degree)
Latit
ude
(deg
ree)
Master and Rover Receiver Position over 1871 Epochs
MasterRover
Figure 11: Master and Rover Receivers TrajectoriesUsing Method C
0 500 1000 1500 2000−2
−1.5
−1
−0.5
0
0.5
1
1.5
Epochs [0.2 s interval]
Bas
elin
e V
ecto
r (m
)
Baseline Vector over 1871 Epochs
XYZ
Figure 12: Baseline Vectors Using Method C
8

0 500 1000 1500 2000
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
Epochs [0.2 s interval]
Bas
elin
e le
ngth
(m
)
Baseline Length over 1871 Epochs
Figure 13: Baseline Length Using Method C
5.4 Results of method D
The fourth method is using simultaneous observa-tions of carrier phase of master receiver and roverreceiver. Figure 14 shows the baseline length ac-cording to the time. The average baseline length is1.345m. The variation of the baseline length is be-tween−0.016m and0.016m and the standard devi-ation is0.004m. The result is much better than theother three methods.
0 500 1000 1500 20001.325
1.33
1.335
1.34
1.345
1.35
1.355
1.36
1.365
Epochs [0.2 s interval]
Bas
elin
e le
ngth
(m
)
Baseline Length over 1871 Epochs
Figure 14: Baseline Length Using Method D
5.5 Compare of the four methods
The compare of the results of the four methods isshown in Table 1. As the standard deviation (STD)of method D is only0.004m, the corresponding
mean value1.345m of baseline estimation is then setas the distance between the the two fixed antennas inthis experiment.
Table 1: Compare of four methods of baseline esti-mation
Method A B C DMean (m) 1.378 1.431 1.588 1.345Max (m) 1.700 2.127 1.845 1.360Min (m) 1.020 0.984 1.227 1.329
Max-Mean (m) 0.322 0.696 0.257 0.016Min-Mean (m) -0.357 -0.447 -0.361 -0.016
STD (m) 0.099 0.157 0.148 0.004Error (%) 2.5 6.4 18.1 0
The baseline calculation method A and C is the samewith each other, but the difference between these twomethods is that method C using an online websiteprogram while method A using the Matlab code pro-duced by the authors. The baseline results of methodA is much better than method C because the Matlabcode we have created has taken account most factorswhich may effect the positioning accuracy.
We can find that the baseline results using methodA, B and C are not ideal. It means that when we usepseudorange observations to calculate baseline, theresult is not accurate enough.
The method D using carrier phase has the standarddeviation value of0.004m of baseline calculation,which is very accurate. So this method is proved tobe an efficient way to do kinetic or post processingfor GPS multiple antennas systems, and is especiallyuseful for GPS attitude determination.
6 SUMMARY AND CONCLU-SION
In this paper, Matlab codes are used to perform GPSshort-distance baseline estimation from RINEX filesunder Matlab environment. First, the fundamentalprinciple of baseline estimation from two antennas isintroduced. Second, the RINEX file and the defini-tion of the GPS observations, including Time, Pseu-dorange, Phase, Doppler, are described. And two ex-amples of snapshots of GPS Observation Data Fileand GPS Navigation Message File are illustrated.
9

Third, the system flow chart of the experiment is de-scribed. Fourth, results of data processing and com-pare of the four methods are shown and plotted.
We have found that the baseline results using methodA, B and C are not ideal. It means that when weuse pseudorange observations to calculate baseline,the result is not accurate enough. The method D us-ing carrier phase has the standard deviation value of0.004m of baseline estimation, which is very accu-rate. So this method is proved to be an efficient wayto do kinetic or post processing for GPS multiple an-tennas systems, and is especially useful for GPS at-titude determination.
By observing all the processing results, we can con-clude that using GPS carrier phase observations tocalculate baseline length has much higher accuracythan using GPS pseudorange observations.
ACKNOWLEDGMENTS
The first author would like to thank Chinese Scholar-ship Council which sponsors her studies in the UK.Many thanks to Institute of Engineering Surveyingand Space Geodesy (IESSG), University of Notting-ham for arranging the field experiment and providingcorresponding raw data.
References
[1] Werner Gurtner,RINEX: The Receiver IndependentExchange Format Version 2.10, 10th December, 2007,ftp://igscb.jpl.nasa.gov/pub/data/format/rinex210.txt
[2] Werner Gurtner, RINEX: The Re-ceiver Independent Exchange FormatVersion 3.00, 28th November, 2007,ftp://epncb.oma.be/pub/data/format/rinex300.pdf
[3] P. Heroux, J. Kouba,GPS Precise Point PositioningUsing IGS Orbit Products, Physics and Chemistry ofthe Earth (A), Vol. 26, No. 6-8, pp. 573-578, 2001
[4] Elliott D. Kaplan, Christopher J. Hegarty,Under-standing GPS: Principles and Applications (2nd Edi-tion), Artech House Publishers, Norwood, MA, 2006.
[5] Bradford W. Parkinson, James J. Spiker Jr.,GlobalPositioning System: Therory and Applicaitons VolumeII , American Institute of Aeronautics & Astronautics,January 1996
[6] Wen Zhang, Mounir Ghogho, L. Enrique Aguado,Extension of GPS Broadcast Ephemeris to Deter-mine Satellite Velocity and Acceleration, ENC-GNSS2009, Naples, Italy, 3-6 May 2009
[7] Wen Zhang, Mounir Ghogho, L. Enrique Aguado,GPS Single Point Positioning and Velocity Compu-tation from RINEX File under Matlab Environment,13th IAIN World Congress, Stockholm, Sweden, 27-30 October 2009
[8] Kai Borre, The GPS Easy Suite-Matlab code for theGPS newcomer, GPS Solutions(2003)7:47-51
[9] Kai Borre, Dennis M. Akos, Nicolaj Bertelsen, PeterRinder, and Søren Holdt Jensen,A Software-DefinedGPS and Galileo Receiver: Single-Frequency Ap-proach. Birkhuser, Boston, MA, 2006
10

![[PPT]GPS Data Format NEMA-0183 - Geodetic · Web viewRTCM Data Format (Radio Technical Commission for Maritime Services) RINEX Raw GPS static data format for data processing and archive](https://img.pdfslide.us/doc/110x75/5b2bc6dd7f8b9a6d188b821d/pptgps-data-format-nema-0183-geodetic-web-viewrtcm-data-format-radio-technical.jpg)