Embed Size (px)
Citation preview

GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks
1Yuanfang Chen, 1Mingchu Li, 1Weifeng Sun, 2Lei Shu and 1Xuemin Cheng
1, First AuthorSchool of Software, Dalian University of Technology-China, E-mail: [email protected], [email protected], [email protected]
*Corresponding AuthorE-mail: [email protected] 2Department of Multimedia Engineering, Osaka University-Japan,
E-mail: [email protected] or [email protected]
Abstract
In wireless sensor networks (WSNs), many applications require location awareness. GPS is generally not suitable to establish indoor locations. In this paper, we propose a GPS-free and Anchor-free (GFAF) indoor localization algorithm. GFAF algorithm uses a mobile node to move according to a special trajectory in deployment area and the mobile node calculates its real-time coordinate according to the start coordinate and move information, and then the mobile node broadcasts its current coordinate to unknown nodes within its transmission radius, and finally the unknown nodes can use these broadcasted coordinates and the observations between unknown nodes and mobile node to calculate their locations based on a posterior probability formula. In contrast to current up-to-date anchor-based localization methods, the proposed algorithm is fully distributed, where each unknown node only needs the information of real-time observation and mobile node coordinate, without cumbersome partitioning and merging process. The algorithm is highly scalable, with limited error propagation and linear computation and communication cost with respect to the size of the network. Extensive simulations and comparison with other methods under various representative network settings are carried out, showing superior performance of the proposed algorithm.
Keywords: Localization, GPS-free Localization, Mobility, Wireless Sensor Networks
1. Introduction
Wireless Sensor Networks (WSNs) have attracted a great deal of research interest during the last few years. Localization is a key aspect of such networks, since the knowledge of a sensor’s location is critical in order to process information originating from this sensor, or to actuate responses to the environment, or to infer regarding an emerging situation etc. In recent years, mobility has become an important area of research for the localization community [1,2,3]. Although the mobility of the WSNs deployment was initially regarded as having several challenges that needed to be overcome, including connectivity, coverage, and energy consumption. However, recent studies have been showing mobility in a more favorable light [4,5], and some complicating issues can be solved effectively by mobile entities [6]. In addition, mobility enables sensor nodes to target and track moving phenomena such as vehicles.
At present, the most widely used method for mobility localization is GPS (Global Positioning System)-based [7,8,9]. The accuracy of GPS is within 10 meters and admirably, GPS is free to use anywhere on the planet.
However, there are several situations in which GPS is not workable reliably, because GPS requires line of sight to multiple satellites. In the mobile sensor network that is deployed in the indoor, downtown, underground or off-planet environments, GPS is not able to be used. Furthermore, although GPS receiver is available for mote-scale devices, it is still relatively expensive (because the specialized equipment is still needed) and is energy inefficient. Therefore GPS is undesirable for many deployments. Some researchers use some range-free methods which are based on anchor nodes (their locations are known). However, the accuracy of these methods is not high and the locations of the anchors need to be measured (the workload is heavy for a large-scale network).
Therefore, in this paper, we propose a GPS-free and Anchor-free localization method: GFAF, to solve indoor and high-precision localization problem (Fig.1).
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
International Journal of Advancements in Computing Technology(IJACT) Volume4, Number16,September 2012 doi:10.4156/ijact.vol4.issue16.8
64

Figure 1. The indoor and high-precision localization problem and our method. The green points are unknown nodes, the red points are estimated coordinates of these unknown nodes, and the red triangle is
mobile node which can connect with the unknown nodes within its transmission radius.
First, we use a mobile node to move according to a special trajectory in deployment area, and the
mobile node dynamically calculates its real-time locations according to its start coordinate which can be set by manual operation, and its mobile information, e.g., movement speed, elapsed time and steering angle. And then, the mobile node broadcasts its current coordinate to unknown nodes within its transmission radius, and finally the unknown nodes use these coordinates to calculate their locations according to a posterior probability formula.
In summary, the contributions of this paper are shown as follows: (1) A GPS-free and anchor-free indoor localization algorithm is proposed. Recently, the interest for
indoor localization has been increasing [10,11,12]. Google Maps launches the indoor mapping functionality to figure out how to find ATMs, and your flight gate once you are inside. However, the Google Maps is based on the floor plans which are provided by businesses (e.g., IKEA, Macy and airports), and some businesses or governments do not want to provide their floor plans for security or other reasons. And Google claims 5-10m accuracy inside buildings such as airports and shopping malls. Moreover, recently, some application demands for precise indoor localization are raising. For instance, museums expect to get user locations [13] for sending the relevant information about the paintings that users walk by, automatically. So such high accuracy demands, these applications are inherently intolerant to small errors. If a localization scheme incorrectly places a user in the adjacent painting and downloads information, the purpose of localization is entirely defeated. This is unlike traditional applications: GPS-based driving directions, where small errors are tolerable. As a consequence, new localization schemes will need to meet strict standards, without incurring additional costs of installation and maintenance. Our algorithm is GPS-free, anchor-free and even floor plan-free. Moreover, our localization algorithm is high-precision: from the extensive simulations, we can find that the centimeter-level localization error can be reached under some parameter configurations.
(2) The GFAF algorithm can do real-time coordinate calculation. In our algorithm, we use a mobile node to broadcast its current coordinates, and the unknown nodes receive the current broadcasted coordinate information and the current observation between unknown nodes and the mobile node, to do localization; so our coordinate calculation is based on current information and is real-time. This character decreases the communication cost of network. For example, the anchor-based localization algorithms (e.g., DV-Hop) need wide-ranging communication to spread the coordinate information of anchors. Compared with these algorithms, our algorithm only needs current observed information to dynamically calculate the coordinates of mobile node and unknown nodes.
(3) A detailed analysis and proof about the impact of the mobile node’s trajectory on localization are shown in this paper.
This paper is organized as follows. Section 2 states related work in more details. Section 3 describes our model. The detail of GFAF algorithm and correlative discussion are discussed in Section 4. Simulation results and analyses are shown in Section 5. Finally, Section 6 summarizes this paper and predicts future research work.
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
65
2. Related Work
Currently, a kind of high sensitivity GPS receiver is developed based on chip and processing power
technologies, which is able to receive satellite signals in most indoor environments and attempts to determine the 3D location indoors [14,15,16]. However, proper coverage for the required for satellites to locate a receiver is not achieved with all current designs about high-sensitivity GPS receiver, and such GPS receiver is expensive and energy inefficient.
In the WSNs domain, the anchor-based localization algorithms can be used indoors. And according to process technique, the anchor-based algorithms can be classified into two categories: centroid-based and hop count-based.
First, centroid-based algorithms estimate the location of a sensor by calculating the centroid positions of proximate anchors. This requires a large number of anchors. In [17], an anchor & centroid-based localization algorithm is proposed: APIT. In this work, first, each node tests (the test is called Point-In-Triangulation Test (PIT)) whether it is inside a particular triangle formed by three anchors which are from all audible anchors. And then the APIT repeats the PIT with different audible anchor combinations until all combinations are exhausted or the required accuracy is achieved. The node’s position is estimated to be the center of intersection of all triangles within which the node has been identified. The APIT method significantly improves the previous centroid-based range-free scheme. However, it relies on the number of audible anchor nodes for the unknown node and the method requires the information exchange between the node and its neighbors, thereby increasing the communication overheads of the node.
Grid Scan is inspired by APIT. Firstly, each unknown node obtains the intersection region of its 1-hop anchors’ transmission area as the estimate region of its location. Secondly, the region is divided into grid array (by examining the distance between any of the 1-hop and 2-hop anchors, the grid can be confirmed [18]) and if possible, every grid places some sensor nodes. Finally, the estimated location is got by averaging locations of the possible grids.
Second, in hop count-based algorithms, the hop count value is increased at every intermediate hop. The classical anchor-based & hop-counting range-free algorithm is DV-Hop [19,20]. First, it uses distance vector routing method to propagate packets and each node maintains a hop counter denoting the minimum number of hops to each anchor; when a node receives a new anchor node information packet, if its hop count is smaller than the stored hop count for that anchor, the recipient updates its hop count value and forwards this packet with increasing the hop count value. And then, anchor nodes compute “average distance per hop” using the anchors’ coordinates and hop count information between anchor nodes. Finally, based on the received locations of anchor nodes and the corresponding average distance per hop, every unknown node calculates the coordinate.
MDS-MAP is a multidimensional scaling (MDS)-based & hop count-based range-free localization method [21]. It determines the positions of nodes using the information: which nodes are within communications range of which others. In addition, if the distances between neighboring nodes can be measured, this distance information is also useful in this method. The MDS-MAP is able to generate relative node positions’ maps when there are not “anchor” nodes that have known absolute coordinates, in the network and when the positions of a sufficient number of anchor nodes are known, e.g., 3 anchors for 2-D localization and 4 anchors for 3-D [21], MDS-MAP can determine the absolute coordinates of all nodes in the network. The MDS-MAP is creditable, when nodes are positioned in relatively uniform space, especially when the number of anchor nodes is low, because the MDS-MAP uses the distance or connectivity information between all nodes at the same time, compared with previous triangulation-based methods that locate one unknown node at a time and only use the information between the unknown nodes and the anchor nodes. However, like many existing methods, MDS-MAP does not work well on irregularly shaped networks, where the distance of shortest path between two nodes does not well correlate with their true Euclidean distance.
The Bounding box algorithm [22,23], can work well on irregularly shaped networks, and is a kind of computationally simple method, when the “unknown nodes’ ranges to several anchor nodes” is given. Each node assumes that it lies within the intersection of its anchors’ bounding boxes. The bounding box for an anchor node sa is centered at the anchor position (Xsa,Ysa), and has height and width: 2Dsa, where the Dsa is the node’s distance measurement to this anchor node. The position of a node is the center of intersection of several anchor bounding boxes.
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
66

However, the performance of the anchor-based localization algorithms depends on the content of received packets, so these presented algorithms perform well only when a large percentage of anchors are available, the graph connectivity is high and precise range measurements can be determined. 3. Our Model
Our network consists of two key parts: some static unknown nodes (these unknown nodes can be mobile nodes also, but in this paper, we fix them for facilitating the study of indoor localization problem) and a mobile node. The unknown nodes are to be located and the mobile node can be worn by person moving through a building. 3.1 Network Model
A number of unknown nodes are installed at fixed and unknown locations randomly. A key role of these static unknown nodes is to receive the data packets coming from the mobile node. The mobile node worn by people has two important roles. Firstly, the number of data packets being transmitted from the mobile node needs to be minimized to save energy. Secondly, the data packets have to be reliably transferred to the static unknown nodes within 1-hop range of mobile node. In this way, we guarantee a reliable transmission and a maximum transmission rate between the mobile node and the static unknown nodes with minimal data packet overhead.
Our WSN can be modeled as a directed graph G=(S, L), where the S={sm, s1, …, sn} denotes the set of nodes which include mobile node sm and n unknown nodes: s1, s2, …, sn, and L is the set of transmission links which are directed. A transmission link exists between mobile node and an unknown node, if and only if the unknown node can be found by mobile node and can receive data packet from mobile node. Moreover, the transmission radiuses of all nodes are the same and are denoted as r. The mobile node needs to maintain the data that include these fields: start coordinate (xs
m, ysm), move speed vm, elapsed
time dtm, and steering angle θm. And the transmitted data packet has these fields: mobile node’s real-time current coordinate (xc
m(t), ycm(t)), distance between the mobile node and the observed unknown node at
time t: dm,u(t), and the angle of difference between mobile node and the observed unknown node at time t: αm,u(t). 4. Our Method 4.1 Our Localization Problem Description
Our localization problem can be described as: the mobile sensor moves from start point with coordinate (xs
m, ysm), through a sequence of controls, u1, u2, …, ut. As it moves, it observes the nearby
unknown nodes, e.g., at the time t, it observes the unknown node su, and the observation measurement can be denoted as zt={dm,u(t), αm,u(t)}. Our localization problem is concerned with estimating the locations of the unknown nodes from the mobile sensor real-time coordinates and the observation measurements. Between the real-time coordinate estimations of mobile sensor is a conditional independence relation. 4.2 Our GFAF Method
The GFAF localization method includes three steps which can be described as follows: Step 1: The mobile node moves along a special trajectory, and calculates its current coordinate
dynamically. Using the start coordinate (xsm, ys
m), movement speed vm, elapsed time dtm, and steering angle θm, of mobile sensor, according to the formulae: xc
m=cosθm×vm×dtm+xsm and
ycm=sinθm×vm×dtm+ys
m, we can obtain the real-time current coordinate of the mobile node: (xcm(t),
ycm(t)). Step 2: The mobile node broadcasts its current coordinate to unknown nodes within its transmission
radius. The broadcast packet is: [(xcm(t), yc
m(t)); zt]. Step 3: Each unknown node uses the received broadcast packets to calculate and constantly adjust its
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
67

location using a posterior probability. Because the coordinate estimation of unknown node is based on the move information of mobile node, the coordinate estimation of an unknown node sk can be defined as a posterior probability:
p((xk, yk)|(xm, ym)t, zt)=p(zt|( xk, yk), (xcm(t), yc
m(t)))p((xk, yk)| (xm, ym)t-1, zt-1). (1) Where the (xm, ym)t={(xc
m(1), ycm(1)), (xc
m(2), ycm(2)), (xc
m(3), ycm(3)), …, (xc
m(t), ycm(t))}, the zt={z1,
z2, z3, …, zt}, and the number of members of each set about these two sets is equal to the times of the unknown node sk being observed by mobile node till time t. 4.3 Move Trajectory Discussion of Our Method
We use a mobile sensor node to move according to a special trajectory (we test three common move trajectories [24,25,26,27]: grid, equilateral triangle and randomization, which are shown in Fig.2) in deployment area, to implement the localization of unknown nodes.
Figure 2. Three common move trajectories: grid, equilateral triangle and randomization
Which kind of traveling trajectory of mobile sensor node can optimize the localization? In order to
solve this problem, two essential requirements need to be considered. First, the traveling node can cover an entire WSN during the localization process of unknown nodes. Second, the traveling trajectory length of the mobile node should be as short as possible to guarantee the efficiency of the algorithm. So the geometric problem of the optimal broadcast position of mobile sensor node is how to use the minimum number of broadcast messages to cover all unknown nodes in deployment area, and each unknown node receives broadcast message at least once. The optimal coverage without a hole needs to be guaranteed for the localization of unknown nodes in a deployment area.
In order to totally cover the deployment area R, the sufficient broadcasts must be sent by mobile sensor inside area R and their coverage areas (we can use a disk to denote the coverage area of a broadcast) intersect one another. Given that the overlap between the ith and [(i mod k)+1]th disks (they are adjacent disks and we assume the radius of disk r=1 (Fig.3)) is (αi−sinαi), 1≤i≤k, where the k is the number of broadcast messages of mobile sensor received by one unknown node. We ignore the overlap caused by non-adjacent disks, and then the total overlap is L=∑i=1
k(αi−sinαi). Our optimal coverage problem can be formulated as:
min∑i=1k(αi−sinαi), subject to ∑i=1
kαi=(k−2)π. (2) Using the Lagrangian multiplier method, we can get the solution of the above-mentioned optimization
problem: αi=(k−2)π⁄k, and L=(k−2)×π−k×sin((k−2)π⁄k). So the overlap per disk is: L⁄k=π−(2π⁄k)−(k×sin(2π⁄k)), monotonically increase with k, and k≥3. Moreover when k=3, the optimal solution is αi=π⁄3, and when k>3, the overlap per disk is always higher than that in the case of k=3. This implies that the center of the three disks should form an equilateral triangle with edge √3, and when r≠1, the edge of the equilateral triangle is √3r. According to the above analytic result and references [28,29,30], we can get the following theorem.
Theorem 1. To minimize the overlap of two disks, only one disk should be used and the center of the three disks should form an equilateral triangle with side length√3r, where the r is the radius of the disks.
From the Theorem 1, we can find that the equilateral triangle traveling trajectory can make the mobile sensor using least broadcast messages to cover all unknown nodes in deployment area, without a hole.
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
68
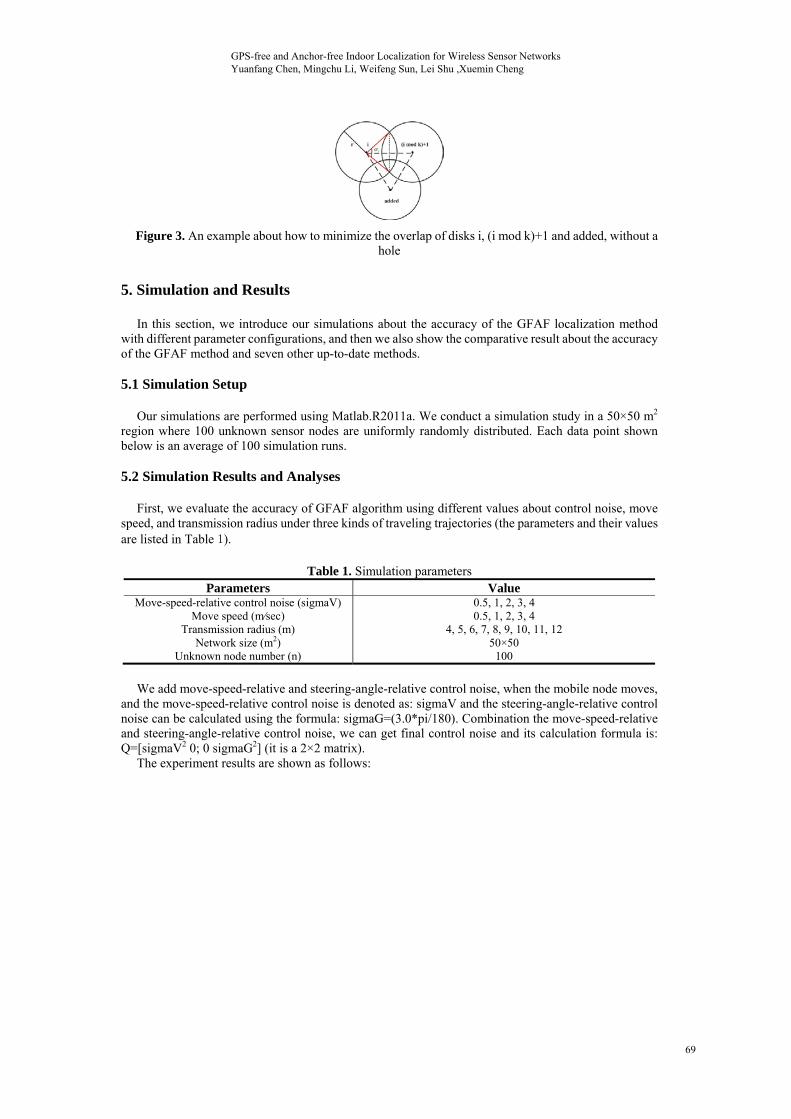
Figure 3. An example about how to minimize the overlap of disks i, (i mod k)+1 and added, without a hole
5. Simulation and Results
In this section, we introduce our simulations about the accuracy of the GFAF localization method with different parameter configurations, and then we also show the comparative result about the accuracy of the GFAF method and seven other up-to-date methods. 5.1 Simulation Setup
Our simulations are performed using Matlab.R2011a. We conduct a simulation study in a 50×50 m2 region where 100 unknown sensor nodes are uniformly randomly distributed. Each data point shown below is an average of 100 simulation runs. 5.2 Simulation Results and Analyses
First, we evaluate the accuracy of GFAF algorithm using different values about control noise, move speed, and transmission radius under three kinds of traveling trajectories (the parameters and their values are listed in Table 1).
Table 1. Simulation parameters Parameters Value
Move-speed-relative control noise (sigmaV)Move speed (m⁄sec)
Transmission radius (m) Network size (m2)
Unknown node number (n)
0.5, 1, 2, 3, 4 0.5, 1, 2, 3, 4
4, 5, 6, 7, 8, 9, 10, 11, 12 50×50
100
We add move-speed-relative and steering-angle-relative control noise, when the mobile node moves,
and the move-speed-relative control noise is denoted as: sigmaV and the steering-angle-relative control noise can be calculated using the formula: sigmaG=(3.0*pi/180). Combination the move-speed-relative and steering-angle-relative control noise, we can get final control noise and its calculation formula is: Q=[sigmaV2 0; 0 sigmaG2] (it is a 2×2 matrix).
The experiment results are shown as follows:
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
69
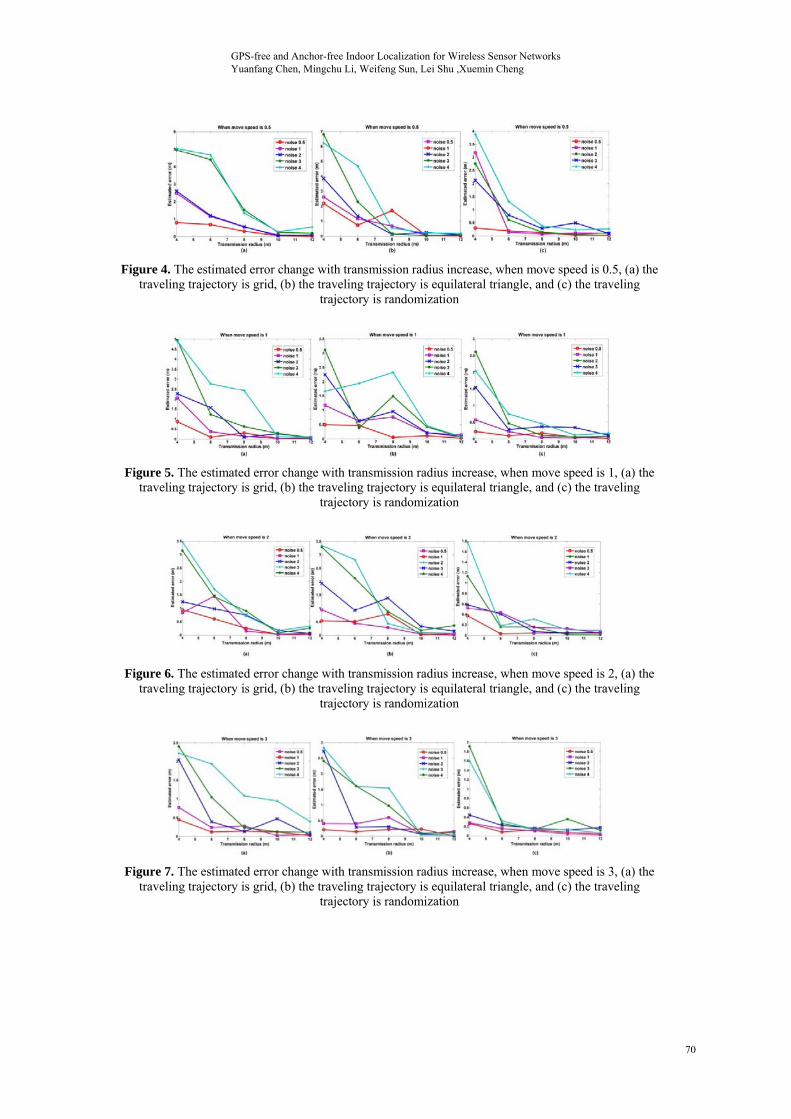
Figure 4. The estimated error change with transmission radius increase, when move speed is 0.5, (a) the traveling trajectory is grid, (b) the traveling trajectory is equilateral triangle, and (c) the traveling
trajectory is randomization
Figure 5. The estimated error change with transmission radius increase, when move speed is 1, (a) the traveling trajectory is grid, (b) the traveling trajectory is equilateral triangle, and (c) the traveling
trajectory is randomization
Figure 6. The estimated error change with transmission radius increase, when move speed is 2, (a) the traveling trajectory is grid, (b) the traveling trajectory is equilateral triangle, and (c) the traveling
trajectory is randomization
Figure 7. The estimated error change with transmission radius increase, when move speed is 3, (a) the traveling trajectory is grid, (b) the traveling trajectory is equilateral triangle, and (c) the traveling
trajectory is randomization
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
70
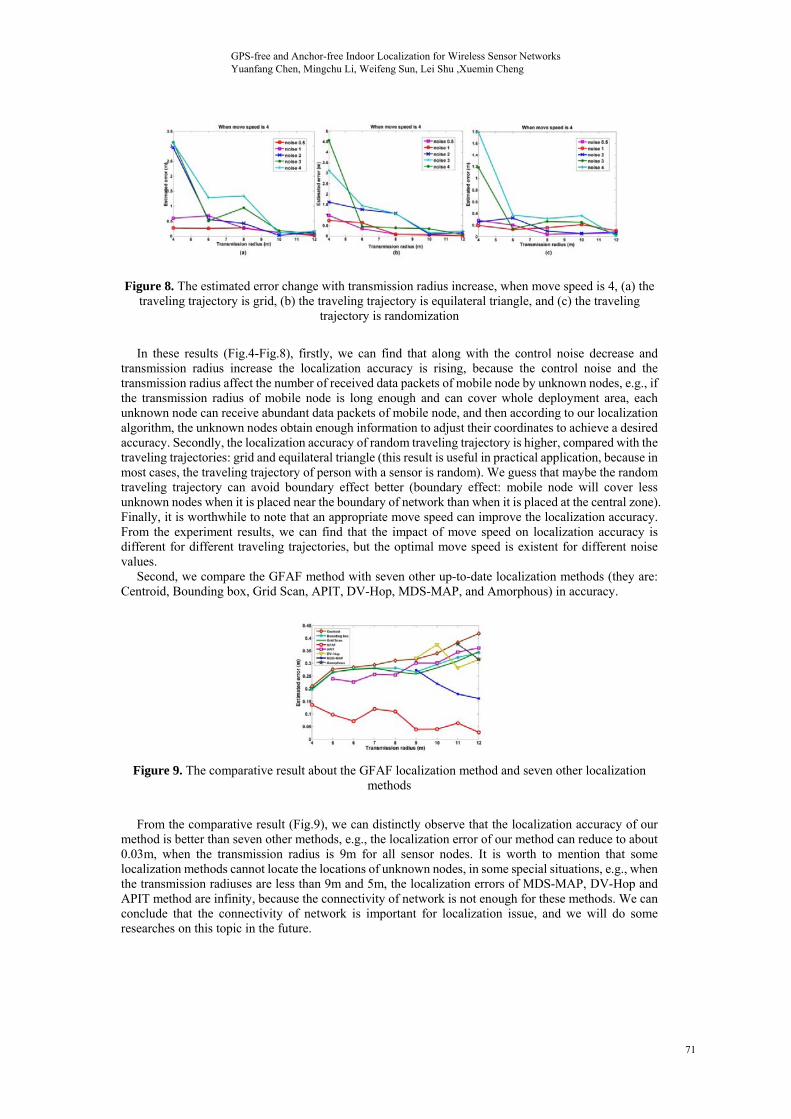
Figure 8. The estimated error change with transmission radius increase, when move speed is 4, (a) the traveling trajectory is grid, (b) the traveling trajectory is equilateral triangle, and (c) the traveling
trajectory is randomization
In these results (Fig.4-Fig.8), firstly, we can find that along with the control noise decrease and
transmission radius increase the localization accuracy is rising, because the control noise and the transmission radius affect the number of received data packets of mobile node by unknown nodes, e.g., if the transmission radius of mobile node is long enough and can cover whole deployment area, each unknown node can receive abundant data packets of mobile node, and then according to our localization algorithm, the unknown nodes obtain enough information to adjust their coordinates to achieve a desired accuracy. Secondly, the localization accuracy of random traveling trajectory is higher, compared with the traveling trajectories: grid and equilateral triangle (this result is useful in practical application, because in most cases, the traveling trajectory of person with a sensor is random). We guess that maybe the random traveling trajectory can avoid boundary effect better (boundary effect: mobile node will cover less unknown nodes when it is placed near the boundary of network than when it is placed at the central zone). Finally, it is worthwhile to note that an appropriate move speed can improve the localization accuracy. From the experiment results, we can find that the impact of move speed on localization accuracy is different for different traveling trajectories, but the optimal move speed is existent for different noise values.
Second, we compare the GFAF method with seven other up-to-date localization methods (they are: Centroid, Bounding box, Grid Scan, APIT, DV-Hop, MDS-MAP, and Amorphous) in accuracy.
Figure 9. The comparative result about the GFAF localization method and seven other localization methods
From the comparative result (Fig.9), we can distinctly observe that the localization accuracy of our
method is better than seven other methods, e.g., the localization error of our method can reduce to about 0.03m, when the transmission radius is 9m for all sensor nodes. It is worth to mention that some localization methods cannot locate the locations of unknown nodes, in some special situations, e.g., when the transmission radiuses are less than 9m and 5m, the localization errors of MDS-MAP, DV-Hop and APIT method are infinity, because the connectivity of network is not enough for these methods. We can conclude that the connectivity of network is important for localization issue, and we will do some researches on this topic in the future.
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
71

6. Conclusion and Future Work
In this paper, we propose a high-accuracy GFAF indoor localization method, which only needs a mobile sensor node, and mobile node’s real-time coordinate is calculated from its real-time traveling information (e.g., movement speed, elapsed time and steering angle) and mobile sensor’s start point coordinate. The unknown nodes only receive the broadcast information from mobile sensor to do localization, so the communication overhead of the whole network is low. Moreover, the localization accuracy of the GFAF method is high (up to 93% improvement: the estimated localization error 0.425m is a wonderful value, in current localization research area, but our method’s localization error is 0.03m).
We also prove that the equilateral triangle traveling trajectory can make the mobile sensor node use least broadcast messages to cover deployment area of unknown nodes, without a hole.
From the simulations, we can find that the connectivity of network that is belong to MAC layer property can affect the accuracy of localization, so we will do research about the impact of MAC layer on localization accuracy. Moreover, because the energy and network lifetime are important for WSNs, we will do some investigations and evaluations about the energy efficiency of our localization method. 7. Acknowledgement
This work is supported in part by Natural Science Foundation of China under grant No. 61100194. Weifeng Sun’s work is supported in part by Natural Science Foundation of China under grant No. 61103233, 60903153. 8. References [1] I. Constandache, S. Gaonkar, M. Sayler, R.R. Choudhury, L. Cox, “EnLoc: Energy-efficient
localization for mobile phones”, In INFOCOM, pp.2716-2720, 2009. [2] H. Chen, B. Liu, P. Huang, J. Liang, Y. Gu, “Mobility-assisted node localization based on TOA
measurements without time synchronization in wireless sensor networks”, Mobile Networks and Applications, pp.1-10, 2010.
[3] X. Li, N. Mitton, I. Simplot-Ryl, D. Simplot-Ryl, “Dynamic beacon mobility scheduling for sensor localization”, IEEE Transactions on Parallel and Distributed Systems, vol. 23, no. 8, pp.1439-1452, 2012.
[4] E. Ekici, Y. Gu, D. Bozdag, “Mobility-based communication in wireless sensor networks”, IEEE Communications Magazine, vol. 44, no. 7, pp.56-62, 2006.
[5] P. Xu, X.H. Xu, S.J. Tang, X.Y. Li, “Truthful online spectrum allocation and auction in multi-channel wireless networks”, In INFOCOM, pp.26-30, 2011.
[6] S.A. Munir, B. Ren, W. Jiao, B. Wang, D. Xie, J. Ma, “Mobile wireless sensor network: architecture and enabling technologies for ubiquitous computing”, In Proceedings of the 21st International Conference on Advanced Information Networking and Applications Workshops, AINAW, pp.113-120, 2007.
[7] K.F. Ssu, C.H. Ou, H.C. Jiau, “Localization with mobile anchor points in wireless sensor networks”, IEEE Transactions on Vehicular Technology, vol. 54, no. 3, pp.1187-1197, 2005.
[8] A. Ledeczi, M. Maroti, “Wireless sensor node localization”, Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, vol. 370, no. 1958, pp.85-99, 2012.
[9] D. Koutsonikolas, S.M. Das, Y.C. Hu, “Path planning of mobile landmarks for localization in wireless sensor networks”, Computer Communications, Elsevier, vol. 30, no. 13, pp.2577-2592, 2007.
[10] S.A. Mitilineos, D.M. Kyriazanos, O.E. Segou, J.N. Goufas, S.C.A. Thomopoulos, “Indoor localization with wireless sensor networks”, Progress in Electromagnetics Research, vol. 109, pp.441-474, 2010.
[11] S. Sen, B. Radunovic, R. Roy Choudhury, T. Minka, “Precise indoor localization using PHY information”, In Proceedings of the 9th International Conference on Mobile Systems, Applications, and Services, pp.413-414, 2011.
[12] J. Robles, “Considerations in the design of indoor localization systems for wireless sensor
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
72
networks”, Energy-Aware Communications, pp.43-53, 2011. [13] E. Bruns, B. Brombach, T. Zeidler, O. Bimber, “Enabling mobile phones to support large-scale
museum guidance”, Multimedia, IEEE, vol. 14, no. 2, pp.16-25, 2007. [14] J. Zhang, B. Li A.G. Dempster, C. Rizos, “Evaluation of high sensitivity GPS receivers”, In
Proceedings of the International Symposium on GPS/GNSS, pp.410-415, 2010. [15] Y. Shi, L. Zhang, Y.B. Liu, “An embedded high sensitivity navigation receiver for GPS”, In
Proceedings of the International Conference on Consumer Electronics, Communications and Networks (CECNet), pp.1023-1026, 2011.
[16] X.X. Qin, C.D. Han, Y.K. Xie, “A high sensitive fast acquisition algorithm suitable to implement in software gps receiver”, Dianzi Xuebao (Acta Electronica Sinica), vol. 38, no. 1, pp.99-104, 2010.
[17] T. He, C. Huang, B. M. Blum, J. A. Stankovic, T. F. Abdelzaher, “Range-free localization schemes for large scale sensor networks”, In Proceedings of ACM/IEEE International Conference on Mobile Computing and Networking (MOBICOM), pp.81-95, 2003.
[18] Z. Yan, Y. Chang, Z. Shen, Y. Zhang, “A Grid-Scan localization algorithm for wireless sensor network”, In Proceedings of IEEE International Conference on Communications and Mobile Computing, pp.142-146, 2009.
[19] D. Niculescu, B. Nath, “DV based positioning in ad hoc networks”, Telecommunication Systems, pp.267-280, 2003.
[20] Jing Chen, Xiaoping Liu, “An improved DV-Hop algorithm based on grey correlation method”, IJACT: International Journal of Advancements in Computing Technology, vol. 4, no. 9, pp.27-34, 2012.
[21] Y. Shang, W. Ruml, Y. Zhang, M. Fromherz, “Localization from mere connectivity”, In ACM MobiHoc, Annapolis, MD, pp.201-212, 2003.
[22] Andreas Savvides, Chih-Chieh Han, Mani B. Strivastava, “Dynamic fine-grained localization in ad-hoc networks of sensors”, In Mobile Computing and Networking, pp.166-179, 2001.
[23] S. Simic, S. Sastry, “Distributed localization in wireless ad hoc networks”, UC Berkeley ERL report, 2002.
[24] J.S. Kim, B.K. Kim, “Minimum-time grid coverage trajectory planning algorithm for mobile robots with battery voltage constraints”, In Proceedings of IEEE International Conference on Control Automation and Systems (ICCAS), pp.1712-1717, 2010.
[25] G. Han, H. Xu, J. Jiang, L. Shu, T. Hara, S. Nishio, “Path planning using a mobile anchor node based on trilateration in wireless sensor networks”, Wireless Communications and Mobile Computing, 2011.
[26] D. Koutsonikolas, S.M. Das, Y.C. Hu, “Path planning of mobile landmarks for localization in wireless sensor networks”, Computer Communications, vol. 30, no. 13, pp.2577-2592, 2007.
[27] Wei Zhi, QingSheng Luo, “An autonomous low cost mobile robot system based on particle swarm intelligent path planner”, IJACT: International Journal of Advancements in Computing Technology, vol. 4, no. 3, pp.141-148, 2012.
[28] H. Zhang, J.C. Hou, “Maintaining sensing coverage and connectivity in large sensor networks”, Ad Hoc and Sensor Wireless Networks, vol. 1, no. 1-2, pp.89-124, 2005.
[29] V. Zalyubovskiy, A. Erzin, S. Astrakov, H. Choo, “Energy-efficient area coverage by sensors with adjustable ranges”, Sensors, vol. 9, no. 4, pp.2446-2460, 2009.
[30] D. Han, W. Li, Z. Li, “Semantic image classification using statistical local spatial relations model”, Multimedia Tools and Applications, vol. 39, no. 2, pp.169-188, 2008.
GPS-free and Anchor-free Indoor Localization for Wireless Sensor Networks Yuanfang Chen, Mingchu Li, Weifeng Sun, Lei Shu ,Xuemin Cheng
73





























