Embed Size (px)
Citation preview
Research ArticleA Mobile Anchor Assisted Localization Algorithm Based onRegular Hexagon in Wireless Sensor Networks
Guangjie Han12 Chenyu Zhang1 Jaime Lloret3 Lei Shu2 and Joel J P C Rodrigues4
1 Department of Information amp Communication Systems Hohai University Changzhou 213022 China2Guangdong Provincial Key Lab of Petrochemical Equipment Fault Diagnosis Guangdong University of Petrochemical TechnologyMaoming 525000 China
3 Integrated Management Coastal Research Institute Universidad Politecnica de Valencia 46000 Valencia Spain4 Instituto de Telecomunicacoes University of Beira Interior 6201-001 Covilha Portugal
Correspondence should be addressed to Jaime Lloret jlloretdcomupves
Received 17 April 2014 Accepted 28 May 2014 Published 13 July 2014
Academic Editor Zhongmei Zhou
Copyright copy 2014 Guangjie Han et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Localization is one of the key technologies in wireless sensor networks (WSNs) since it provides fundamental support for manylocation-aware protocols and applications Constraints of cost and power consumptionmake it infeasible to equip each sensor nodein the network with a global position system (GPS) unit especially for large-scaleWSNs A promising method to localize unknownnodes is to use several mobile anchors which are equipped with GPS units moving among unknown nodes and periodicallybroadcasting their current locations to help nearby unknown nodes with localizationThis paper proposes a mobile anchor assistedlocalization algorithm based on regular hexagon (MAALRH) in two-dimensional WSNs which can cover the whole monitoringarea with a boundary compensation method Unknown nodes calculate their positions by using trilateration We compare theMAALRH with HILBERT CIRCLES and S-CURVES algorithms in terms of localization ratio localization accuracy and pathlength Simulations show that theMAALRH can achieve high localization ratio and localization accuracy when the communicationrange is not smaller than the trajectory resolution
1 Introduction
Wireless sensor networks (WSNs) consist of a large numberof sensor nodes deployed in a given region of interest (ROI)to fulfill tasks such as area surveillance biological detectionhome care object tracking and sending information to sinknodes via multihop communication [1ndash4]
In WSNs determining unknown nodesrsquo locations is acritical task since it provides fundamental support for manylocation-aware protocols and applications such as location-based routing protocol the location information is critical forsensor nodes to make optimal routing decisions [5 6]
Theproblemof localization is a process of finding locationinformation of the unknown nodes in a given coordinatesystem [7ndash9] Based on the distance measurement techniqueused localization algorithms can be classified into range-based localization algorithms and range-free localization
algorithms The range-based localization means that dis-tances between sensor nodes are estimated by using physicalproperties of communication signal that is received signalstrength indicator (RSSI) time of arrival (ToA) time dif-ference of arrival (TDoA) and angle of arrival (AoA) [10]Range-free localization algotihms do not need the distanceor angle information for localization [11]
Constraints of cost and power consumption make itinfeasible to equip each sensor node in the network witha GPS unit especially for large-scale WSNs A promisingmethod to localize unknown nodes is to use several mobileanchors which are equipped with GPS units moving amongunknown nodes and periodically broadcasting their currentlocations (beacon points) to help nearby unknown nodeswith localization [12ndash15] as shown in Figure 1 This kindof architecture offers significant practical benefits since themobile anchor node is not as energy constrained as an
Hindawi Publishing Corporatione Scientific World JournalVolume 2014 Article ID 219371 13 pageshttpdxdoiorg1011552014219371
2 The Scientific World Journal
Unknown nodeMobile anchor Anchor point
R
R
R
Figure 1 Mobile anchor assisted localization
unknown node and the localization accuracy also can beimproved by carefully designing the mobile anchorrsquos move-ment trajectory Moreover the size of a robot is much largerthan the size of a sensor and thus it is much easier to install aGPS unit on it [16]
Generally mobile anchor assisted localization algo-rithm involves three stages (i) mobile anchor traverses theROI while periodically broadcasting beacon packets whichinclude their current positions (ii) unknown nodes withinthe communication ranges of the mobile anchors receive thebeacon packets and estimate distances to the anchors by usingphysical properties of communication signal when neededand (iii) unknown nodes calculate their positions if they fallinside the overlapping communication ranges of at least three(four) noncollinear (noncoplanar) anchor nodes by usingappropriate localization schemes in two-dimensional (2D)(three-dimensional (3D)) WSNs
In this paper we propose a mobile anchor assisted local-ization algorithmbased on regular hexagon (MAALRH)withobjectives of maximizing localization ratio and localizationaccuracy To cover the entire ROI we present a boundarycompensation method (BCM) to ensure that the unknownnodes could fall inside the overlapping communicationranges of at least three noncollinear beacon points
The rest of this paper is organized as follows Section 2gives an overview ofmobile anchor assisted localization algo-rithms Section 3 describes network model and theoreticalbackground Section 4 introduces the proposed MAALRHand the comparing algorithms Simulation results and per-formance analysis are shown in Section 5 Finally Section 6concludes this paper and discusses future research issues
2 Related Work
21 Path Planning Scheme A fundamental research issue ofmobile anchor assisted localization algorithm is to designpath planning scheme that mobile anchor shouldmove alongin a given ROI in order to minimize the localization error aswell as the time required to localize the whole network
Path planning schemes can be either static or dynamicStatic path planning scheme designs movement trajectory
before starting execution mobile anchor follows the pre-defined trajectory during the localization process Dynamicpath planning scheme designs movement trajectory dynam-ically or partially according to the observable environmentsor deployment situations and so forth
211 Static Path Planning Scheme Koutsonikolas et al [17]proposed SCAN DOUBLE-SCAN and HILBERT to satisfynetwork coverage Movement trajectories of SCAN andDOUBLE-SCAN are composed of a series of straight linesHILBERT curve divides the 2D area into square cells andconnects the centers of those cells using line segmentsCompared with SCAN and DOUBLE-SCAN the HILBERTcan provide more noncollinear beacon points for unknownnodes To reduce the collinearity during localization Huangand Zaruba proposed two path planning schemes namelyCIRCLES and S-CURVES CIRCLES consists of a sequenceof concentric circles centered within a ROI S-CURVES isbased on SCAN which progressively scans the monitoringarea from left to right taking an ldquo119878rdquo curve Hu et al [19]proposed a mobile anchor centroid localization (MACL)method The mobile anchor traverses the monitoring areafollowing a spiral trajectory while periodically broadcastingbeacon packets which contain its current position and soforth Zhang et al [20] proposed a collaborative localizationscheme using a group of mobile anchor nodes (GMAN) AGMAN is composed of three anchor nodes which form anequilateral triangle and each anchor node locates at one ofthe three vertexes Cui et al [21] introduced five movementtrajectories for 3DWSNs LAYERED-SCAN and LAYERED-CURVE divide the 3D ROI into several layers along oneaxis and regard each layer as a 2D ROI Thus in each layerof LAYERED-SCAN and LAYERED-CURVE the mobileanchor traverses along one dimension using SCAN and S-CURVES respectively TRIPLE-SCAN and TRIPLE-CURVEdivide the ROI into several layers along three axes 3DHILBERT has more turns compared with LAYERED-SCANand TRIPLE-SCAN to overcome collinearity and coplanarityproblemsCui andWang [22] proposed a four-mobile-beaconassisted weighted centroid localization method The fourmobile beacons form a regular tetrahedron and traverse thegiven ROI following the LAYERED-SCAN trajectory whichconsists of several parallel layers of SCAN
212 Dynamic Path Planning Scheme A large amount ofdynamic path planning schemes were proposed to considerthe real distribution of unknown nodes in the given ROI
Li et al [23] regard a WSN as a connected undirectedgraph They proposed a Breadth-First (BRF) algorithm and aBacktracking Greedy (BTG) algorithm to transform the pathplanning issue into seeking spanning trees of the undirectedgraph and traversing through the graphThus the movementtrajectory of the mobile anchor node changes dynamicallyaccordingly to the distribution of unknown nodes Fu etal proposed a novel dynamic movement trajectory basedon virtual force which is constructed by interaction forcebetween mobile anchor and unknown nodes [24] Eachunknown node is equippedwith an omnidirectional antenna
The Scientific World Journal 3
The mobile anchor uses directional antennas to receivefeedback messages from unknown nodes and calculates thetotal virtual force on itself In [25] threemobile anchors forma regular triangle with the length of its communication rangeand move in a ROI Unknown nodes that do not know theirown positions request the mobile anchor to deliver morebeacon messages The mobile anchor decides its movementtrajectory on the basis of the received request messages In[26] six optional positions are provided to be chosen basedon geometry The mobile anchor finds a new position amongthe six optional positions The unknown node with mostneighbors has the most chance to be the next position of themobile beacon
22 Localization Scheme Another research issue of mobileanchor assisted localization algorithm is to design local-ization scheme by which unknown nodes calculate theirpositions based on beacon points received from mobileanchors
Ssu et al [27] developed a localization mechanism usingthe geometry conjecture that is perpendicular bisector ofa chord If any two chords are obtained the location ofthe sensor node can be easily computed based on theconjecture In [28] instead of using the absolute RSSI valuesby contrasting the measured RSSI values from the mobilebeacon to a sensor node perpendicular intersection (PI)utilizes the geometric relation of PI to compute the positionof the node Guerrero et al [29] intruded an azimuthallydefined area localization (ADAL) algorithm which utilizes abeaconwith a rotary directional antenna to sendmessage in adetermined azimuth periodically and an unknown node usesthe centroid of intersection area of several beaconmessages asits position Arrival and departure overlap (ADO) [30] uses apossible area delimited by two circles with the same radius atdifferent centers To estimate its position an unknown nodeshould obtain prearrival position arrival position departureposition and postdeparture position of the moving beaconto compute its ADO To improve the localization accuracyof Ssursquos scheme Lee et al [31] proposed a method based ongeometric constraints utilizing three beacon points wheretwo are used for obtaining the intersection area and thethird is used further to delimit this area The borderlinemeasurement schemes determine some straight lines thatpass through a sensor node and use the intersection point ofthese lines as its position
3 Network Model and Theoretical Background
31 Network Architecture and Assumptions Network archi-tecture of this paper is shown in Figure 2 There are twotypes of sensor nodes in the network namely unknownnode and mobile anchor All the sensor nodes have thesame communication rang Unknown nodes are deployeduniformly in the ROI The mobile anchor travels amongunknown nodes following the predefined trajectory whileperiodically broadcasting its current location to help nearbyunknown nodes with localization Unknown nodes estimatedistances to themobile anchor by using RSSI technique Once
Mobile anchor
Movement trajectoryUnknown node
R
Figure 2 Network architecture
an unknown node receives at least three noncollinear anchorpoints it will calculate its position by using trilaterationmethod
Two assumptions are made
(a) The mobile anchor has sufficient energy for movingand broadcasting anchor packets during localizationThe speed of the mobile anchor is adjustable anduniform in the process of localization
(b) The communication model is perfect spherical radiopropagation and there existsmeasurement errorsThemobile anchor has identical communication range119903 at all anchor points Only the sensors within thecommunication range are assumed to be able toreceive anchor packets sent by the mobile anchor
32Theoretical Background In a two-dimensional ROI sup-pose that the unknown node 119901(119909
0 1199100) can receive three
anchor coordinates 119901119894(119909119894 119910119894) 119894 = 1 2 3 Distances between 119901
and 119901119894are 119903119894 119894 = 1 2 3 Assume that the measurement error
ranges from minus120576119894to 120576119894 120576119894gt 0 Thus we can obtain
119862119901119894
= (119909 119910) | (119903119894minus 120576119894)2le (119909 + 119909
119894)2+ (119910 + 119910
119894)2le (119903119894+ 120576119894)2
119894 = 1 2 3
(1)
Unknown node calculates its coordinates by using of thetrilateration Thus the localization error is defined as
area (119862119901119894) = (119909 119910) | 119909 isin
3
⋂
119894=1
119862119901119894 119910 isin
3
⋂
119894=1
119862119901119894 (2)
4 The Scientific World Journal
p2
p3
p1
q32q22
q12
q31q21
q11
lq12
p
Figure 3 Analysis of localization error
When themeasurement error 120576 is relatively small119862119901119894can
be linearized and approximated by 119862119901119894 We proved that the
localization error is the smallest when three anchor nodesare placed symmetrically namely three anchor nodes forma regular triangle [32] As shown in Figure 3 let 119897
119901119901119894be the
straight line passing through both 119901 and 119901119894 Thus 119897
119901119901119894will
intersect with 119878119901at two points 119902
1198941and 119902
1198942 For 119895 = 1 2 we
define the line passing through 119902119894119895and tangent to 119878
119901as 119902119894119895
Therefore [32]
area (119862) = 21205762 (tan12057212
2+ tan
12057223
2+ tan
12057231
2) (3)
Note that
12057212+ 12057223+ 12057231= 120587 (4)
Since (tan119909)10158401015840 = 2 tan119909(1+tan119909) ge 0 when 0 le 119909 le 1205872we thus obtain
area (119862) = 61205762 13(tan
12057212
2+ tan
12057223
2+ tan
12057231
2)
ge 61205762 tan
12057212+ 12057223+ 12057231
6= 61205762 tan 120587
6
(5)
The equality holds when
12057212= 12057223= 12057231=120587
3 (6)
In other words the localization error is the smallest whenthree anchor nodes form a regular triangle
4 Mobile Anchor Assisted Localization
The problem of path planning for mobile anchor is to designmovement trajectory satisfying the following properties (i)it should pass closely to as many potential node positions
as possible aiming at localizing as many unknown nodes aspossible (ii) it should provide each unknown node with atleast three (four) noncollinear (noncoplanar) anchor pointsin a 2D (3D) WSN to achieve unique estimation of knownnodersquos position (iii) it should be as short as possible to reducethe energy consumption of mobile anchors and time forlocalization
The performances of mobile anchor assisted localizationalgorithm are influenced by the following factors
(a) Communication range a larger communicationrange of the mobile anchor covers more unknownnodes Thus the unknown nodes have more choicesto select appropriate anchor points to calculate theircoordinates
(b) Movement trajectory a well designed movement tra-jectory can eliminate collinearity (coplanarity) prob-lem and make full use of the real-time informationthat is the distribution of unknown nodes environ-ment information and so forth
(c) Broadcast interval a shorter broadcast intervalmeansthat the mobile anchor would broadcast its locationmore frequently which may bring about a betterlocalization performance
(d) Path length a longer path length means that themobile anchor hasmore opportunities to broadcast itslocation and pass by more unknown nodes howeverit will consume more energy
Thus we should solve the above four problems whendesigning a mobile anchor assisted localization algorithm
41 MAALRH The general procedure of MAALRH consistsof four steps as shown in Algorithm 1
411 Network Segmentation We assume that the ROI is asquare We divide the ROI into several subrectangles accord-ing to the length of the square The communication rangeof mobile anchor nodes can be adjusted according to thelength of subrectangles The distance between two successivesegments of the subrectangles is defined as the resolution(119877) Figure 4 gives an example of network segmentation Thelength of the ROI is 119871 The square can be divided into 119899subrectangles which satisfy 119871 = 119899119877 119899 isin 119873lowast
412 Movement Trajectory Assume that the ROI is a squarewith the area of 119871 times 119871 the vertex coordinates of the ROIare (119909min 119910min) (119909max 119910min) (119909min 119910max) and (119909max 119910max)respectively The mobile anchor is initially located at thecentroid of the ROI The initial coordinates of the mobileanchor can be calculated by using
1199090=
1003816100381610038161003816119909max1003816100381610038161003816 minus
1003816100381610038161003816119909min1003816100381610038161003816
2
1199100=
1003816100381610038161003816119910max1003816100381610038161003816 minus
1003816100381610038161003816119910min1003816100381610038161003816
2
(7)
The Scientific World Journal 5
Step 1The ROI is divided into 119899 subrectangles which satisfy 119871 = 119899119877 119899 isin 119873lowast The communication range of the mobileanchor is equal to the resolution that is 119877 = 119903Step 2Themobile anchor traverses the ROI following the regular hexagon movement trajectory (the concretely movementtrajectory is depicted in Figures 5 and 7) while periodically broadcasting anchor packets 119879send (119909119894 119910119894) 119868119863 where 119879senddenotes the sending time (119909
119894 119910119894) stands for its current location and 119868119863 represents the packet 119868119863
Step 3 Unknown nodes receive the anchor packets broadcasted by the mobile anchor and estimate distances to themby using the RSSI techniqueStep 4 Each unknown node decides if any of the three noncoplanar anchor coordinates can almost form a regulartriangle and if it is within the regular triangle If so the unknown node calculates its location by using the trilateration
Algorithm 1 MAALRH algorithm
R
L = nR
Figure 4 An example of network segmentation
The mobile anchor traverses the entire ROI following theregular hexagon trajectory at the speed of V and broadcasts itscurrent location (119909
119894 119910119894)with an interval119879 and a communica-
tion range 119903 as depicted in Figure 5A rectangular coordinate system is constructed with the
origin at (1199090 1199100) At first the mobile anchor moves from
(1199090 1199100) to one of the vertexes of the regular hexagon with
the side length of 119877 for instance the mobile anchor movesfrom (119909
0 1199100) to (minus(12)119877 (radic32)119877)Then themobile anchor
moves along the sides of the first regular hexagon with theside length of 119877 When the mobile anchor arrives at the point(minus(12)119877 (radic32)119877) once again it moves to (minus119877radic3119877) andthen moves along the sides of the second regular hexagonwith the side length of 2119877 The side length of regularhexagons increases by 119877 each time and the mobile anchortraverses the ROI along the sides of 1198992 regular hexagonsThe cycle repeats until the mobile anchor arrives at thepoint (minus(1198994)119877 (119899radic34)119877) twice Thus the total path lengthwithout a boundary compensation method can be calculatedby using
1198711015840
MAALRH =3
41198992119877 +
3
2119899119877 =
3
4
1198712
119877+3
2119871 (8)
Mobile anchorUnknown nodeMovement trajectory
(minusn4R
nradic3
4R)
(x0 y0)
(minusR radic3R)(minusR
2radic3
2R)
Figure 5 Movement trajectory of MAALRH without a boundarycompensation method
Thus for a givenROI the total path length depends on the119877 A smaller 119877 results in a lager path length Since 119877 = V119879with the same movement speed the smaller 119877 is the lessanchor packets are broadcasted By this means the broad-casted anchor points form many regular triangles
413 Boundary Compensation Method Since the regularhexagon movement trajectory leaves four corners of ROIuncovered to improve localization ratio we present a bound-ary compensation method to enhance the MAALRH InBCM mobile anchor travels in the sensing area which islarger than the ROI as shown in Figure 6 Unknown nodesare deployed uniformly in the ROI while mobile anchormoves in the sensing area according to the movementtrajectory Assume that the length of the ROI is 119871 the lengthof the sensing area is 1198711015840 the relation of 119871 and 119871
1015840 can beexpressed as 1198711015840 = 119871 + 119883 119883 isin 119877
+ and 119883 is determined
6 The Scientific World Journal
R
R
Sensing area
ROI
L
X
Unknown nodeMobile anchor Anchor point
L998400
R
Figure 6 The relation of sensing area and ROI
by the movement trajectory and the communication range ofmobile anchor In other words by enlarging movement areaofmobile anchor theROI can be traversed entirelyThereforeunknown nodes which are at the boundary of the ROI can belocalized
We choose 119883 = 2119877 here Thus when the mobile anchorarrives at the point ((minus1198994)119877 (119899radic34)119877) once again after itmoves along the (1198992)th regular hexagon with the side lengthof 3119899119877 the mobile anchor moves to (minus((119899 + 2)4)119877 ((119899 +2)radic34)119877) and moves along the 1198992 + 1th regular hexagonwith the side length of (3119899 + 6)119877 Then the mobile anchormoves to (minus((119899+4)4)119877 ((119899+4)radic34)119877) andmoves along the1198992+2th regular hexagon with the side length of (3119899+12)119877 toensure that unknown nodes at the boundary of the ROI couldfall inside the overlapping communication ranges of at leastthree noncollinear anchors as shown in Figure 7
Thus path length of the MAALRH with a boundarycompensation method can be calculated by using
119871MAALRH =3
41198992119877 +
15
2119899119877 + 18119877 (9)
414 Trilateration An example of the trilateration is shownin Figure 8 Suppose that the unknown node119863(119909 119910) receivesthree anchor packets from the mobile anchor namely119860(119909119886 119910119886) 119861(119909
119887 119910119887) and 119862(119909
119888 119910119888) Distances between 119860 119861
119862 and 119863 are 119889119886 119889119887 and 119889
119888 respectively Since the unknown
node 119863 is within the regular triangle which is composed of119860 119861 and 119862 unknown node 119863 will calculate its location byusing
(119909 minus 119909119886)2+ (119910 minus 119910
119886)2= 1198892
119886
(119909 minus 119909119887)2+ (119910 minus 119910
119887)2= 1198892
119887
(119909 minus 119909119888)2+ (119910 minus 119910
119888)2= 1198892
119888
(10)
Sensing area
ROI
X
Mobile anchorUnknown nodeMovement trajectory
minus(n + 4)
4R
(n + 4)radic3
4R( )
minus(n + 2)
4R
(n + 2)radic3
4R)(
minusn
4R
nradic3
4R)(
(x0 y0)
Figure 7 Movement trajectory ofMAALRHwith a boundary com-pensation method
Hence
119863(119909 119910)119879=1
2119860minus1119861 (11)
where
A = (119909119886minus 119909119888119910119886minus 119910119888
119909119887minus 119909119888119910119887minus 119910119888
)
B = (1199092
119886minus 1199092
119888+ 1199102
119886minus 1199102
119888+ 1198892
119888minus 1198892
119886
1199092
119887minus 1199092
119888+ 1199102
119887minus 1199102
119888+ 1198892
119888minus 1198892
119887
)
(12)
42 Comparing Algorithms Various path planning schemeshave been proposed for single mobile anchor assisted local-ization We choose HILBERT CIRCLES and S-CURVES tobe compared with our proposed MAALRH
421 HILBERT HILBERT can reduce the collinearity with-out significantly increasing the path length compared withSCAN and DOUBLE-SCAN A level-n HILBERT curvedivides the 119871 times 119871 ROI into 4
119899 square cells and connectsthe centers of those cells using 4119899 line segments [17] Theresolution of the HILBERT curve is defined as the length ofeach line segment Thus 119871 119877 and 119899 satisfy 4119899 = (119871119877) times
(119871119877) Therefore the path length of HILBERT curve can becalculated by using
119871HILBERT = 1198992times 119877 (13)
422 CIRCLES CIRCLES consists of a sequence of concen-tric circles centered within the ROI [18] The resolution is
The Scientific World Journal 7
da
dbdc
Mobile anchorUnknown node
A(xa ya)
B(xb yb) C(xc yc)D(x y)
Figure 8 An example of the trilateration
defined as the diameter of the innermost circle For each outercircle the radius is increased by 119877 sequentially CIRCLEScan reduce collinearity of the anchor points all areas withinthe concentric circles can be localized However CIRCLESleaves four corners of the ROI uncovered The path length ofCIRCLES can be calculated by using
119871CIRCLES =1198992120587119877
4+ (
119899
2minus 1)119877 (14)
423 S-CURVES S-CURVES is based on the SCAN whichprogressively scans the ROI from left to right However S-CURVES takes an ldquo119878rdquo curve instead of moving in a straightline [18] For a 119871 times 119871 ROI and a resolution of 119877 there arelfloor2(119899minus1)3rfloor+1 curve Each vertical ldquo119878rdquo curve consists of 119899minus1semicircle with the radius of 1198772 Therefore the path lengthof S-CURVES can be calculated by using
119871S-CURVES =(119899 minus 1) 120587119877
2(lfloor2 (119899 minus 1)
3rfloor + 1)
+ (119899 minus 2) 119877 +120587119877
2
(15)
5 Performance Evaluation
51 Evaluation Criteria
Localization Ratio Localization ratio is the ratio of the num-ber of localizable unknown nodes to the number of unknownnodes This metric also indicates the coverage degree of themovement trajectory Localization ratio is defined as
119871 ratio =119873119897
119873119900
(16)
Table 1 Parameters used in the simulation
ROI size 480m times 480mCommunication range 60ndash140mResolution 60m 80m and 120mMovement speed 10msNumber of unknown nodes 100ndash500
where119873119897is the number of localizable unknown nodes and119873
119900
is the number of unknown nodes
Localization Accuracy The localization error of unknownnode 119894 is defined as
119890119894=
radic(119906119894minus 119909119894)2+ (V119894minus 119910119894)2+ (119908119894minus 119911119894)2
119903
(17)
where (119906119894 V119894 119908119894) are real coordinates of an unknown node 119894
(119909119894 119910119894 119911119894) are estimated coordinates of an unknown node 119894
and 119903 is the communication range of sensor nodesWe evaluate the localization accuracy by using average
and standard deviation of localization errors of unknownnodes which are defined as
120583119890=1
119873119897
119873119897
sum
119894=1
119890119894
120590119890= radic
1
119873119897
119873119897
sum
119894=1
(119890119894minus 120583119890)2
(18)
where 119873119897is the number of localizable unknown nodes in a
WSN
Path Length To save energy consumption and time forlocalization the path length of the mobile anchor nodeshould be as short as possible
Scalability Scalability means that the localization perfor-mance is independent of the unknown nodes density
52 Experiment Parameters Our simulations are performedusing Matlab Suppose that the ROI is a square Table 1 listsparameters used in simulations Five movement trajecto-ries are compared in this section HILBERT CIRCLES S-CURVES MAALRH and MAALRH BCM (we name theMAALRH with the boundary compensation method asMAALRH BCM) The trilateration is used to calculate coor-dinates of unknown nodes To ensure reliability of evaluationresults 50 simulation runs were performed for each set ofsimulation condition with a different uniform deploymentof unknown nodes on each occasion
53 Simulations and Analysis We evaluate performances offive movement trajectories under three resolutions 60m80m and 120m in terms of localization ratio localizationaccuracy path length and scalability
8 The Scientific World Journal
60 80 100 120 140
Communication range (m)
0
25
50
75
100Lo
caliz
atio
n ra
tio (
)
(a) 119877 = 60
0
25
50
75
100
Loca
lizat
ion
ratio
()
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
0
25
50
75
100
Loca
lizat
ion
ratio
()
(c) 119877 = 120
Figure 9 Localization ratio with different resolutions
531 Localization Ratio Figure 9 depicts the relation be-tween localization ratios and communication ranges underthree resolutions The MAALRH BCM outperforms HIL-BERT CIRCLES and S-CURVES and MAALRH in generalLocalization ratios of MAALRH BCM and HILBERT aresimilar when the communication range is not smaller thanthe resolution Localization ratio of S-CURVES is largerthan that of MAALRH and CIRCLES since MAALRH andCIRCLES leave four corners of ROI uncovered Localizationratio of MAALRH BCM can reach 100 as long as thecommunication range is not smaller than the resolutionsince unknown nodes can receive three noncollinear anchorpoints which can form a regular triangle to estimate theirpositions When the resolution is relatively small that is 119877 =60m localization ratios increase rapidly with the increase ofthe communication range and the localization ratios of the
five algorithms can all reach 100 when the communicationrange is 140m However with the increase of the resolutionthe mobile anchor dose not broadcast anchor packets asfrequently as in the previous case (ie 119877 = 60) onlyMAALRH BCM and HILBERT can reach 100 localizationratio (ie 119877 = 80m and 119877 = 120m) That is becausewith the boundary compensation method MAALRH BCMcan provide noncollinear anchor points to ensure that themovement trajectory can cover the entire ROI When theresolution is much larger than the communication rangeunknown nodes cannot receive enough anchor points toestimate their coordinates which results in zero localizationratios For MAALRH and CIRCLES the movement trajecto-ries leave four corners of the ROI uncovered and unknownnodes on the boundary of the ROI cannot receive at leastthree noncollinear anchor packets from the mobile anchor
The Scientific World Journal 9
60 80 100 120 14000
02
04
06
08120583e
Communication range (m)
(a) 119877 = 60
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
(b) 119877 = 80
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 10 Average deviation with different resolutions
especially when the resolution is large Thus MAALRH andCIRCLES perform worse compared with the other threealgorithms
From the simulation we can conclude that the local-ization ratio depends on the communication range of thesensor nodes and the resolution of the movement trajectorywhich determines the amount and the distance interval of theanchor points
532 Localization Accuracy Figure 10 presents the variationof 120583119890under three resolutions We can observe that with
the increase of the resolution 120583119890increase correspondingly
because distance between two neighboring anchor pointsincreases with the increase of the resolution and results ina larger measurement error MAALRH and MAALRH BCM
almost have the same average deviation since both ofthem use three anchor points which form a regular trian-gle to estimate unknown nodesrsquo coordinates Besides theMAALRH BCM has a boundary comprehension methodto ensure the localization accuracy of all the unknownnodes within a ROI HILBERT and S-CURVES have largeraverage deviations compared with that of MAALRH andMAALRH BCM CIRCLES performs worst among the fivemovement trajectories Because in HILBERT CIRCLESand S-CURVES ordinary nodes randomly select threenoncollinear anchor points to calculate their positions 120583
119890
of MAALRH MAALRH BCM HILBERT and S-CURVESdecrease apparently when the communication range is equalto the resolution (with the variation from 60m to 140m)because more unknown nodes can receive three noncoplanar
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
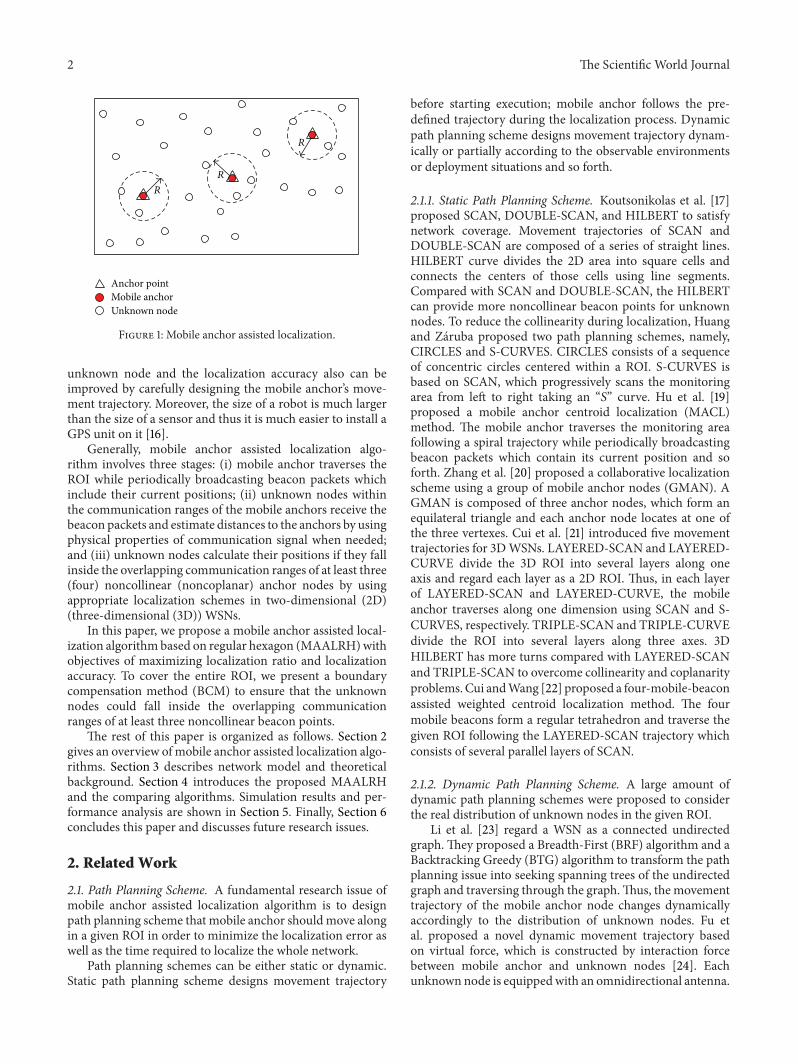
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
2 The Scientific World Journal
Unknown nodeMobile anchor Anchor point
R
R
R
Figure 1 Mobile anchor assisted localization
unknown node and the localization accuracy also can beimproved by carefully designing the mobile anchorrsquos move-ment trajectory Moreover the size of a robot is much largerthan the size of a sensor and thus it is much easier to install aGPS unit on it [16]
Generally mobile anchor assisted localization algo-rithm involves three stages (i) mobile anchor traverses theROI while periodically broadcasting beacon packets whichinclude their current positions (ii) unknown nodes withinthe communication ranges of the mobile anchors receive thebeacon packets and estimate distances to the anchors by usingphysical properties of communication signal when neededand (iii) unknown nodes calculate their positions if they fallinside the overlapping communication ranges of at least three(four) noncollinear (noncoplanar) anchor nodes by usingappropriate localization schemes in two-dimensional (2D)(three-dimensional (3D)) WSNs
In this paper we propose a mobile anchor assisted local-ization algorithmbased on regular hexagon (MAALRH)withobjectives of maximizing localization ratio and localizationaccuracy To cover the entire ROI we present a boundarycompensation method (BCM) to ensure that the unknownnodes could fall inside the overlapping communicationranges of at least three noncollinear beacon points
The rest of this paper is organized as follows Section 2gives an overview ofmobile anchor assisted localization algo-rithms Section 3 describes network model and theoreticalbackground Section 4 introduces the proposed MAALRHand the comparing algorithms Simulation results and per-formance analysis are shown in Section 5 Finally Section 6concludes this paper and discusses future research issues
2 Related Work
21 Path Planning Scheme A fundamental research issue ofmobile anchor assisted localization algorithm is to designpath planning scheme that mobile anchor shouldmove alongin a given ROI in order to minimize the localization error aswell as the time required to localize the whole network
Path planning schemes can be either static or dynamicStatic path planning scheme designs movement trajectory
before starting execution mobile anchor follows the pre-defined trajectory during the localization process Dynamicpath planning scheme designs movement trajectory dynam-ically or partially according to the observable environmentsor deployment situations and so forth
211 Static Path Planning Scheme Koutsonikolas et al [17]proposed SCAN DOUBLE-SCAN and HILBERT to satisfynetwork coverage Movement trajectories of SCAN andDOUBLE-SCAN are composed of a series of straight linesHILBERT curve divides the 2D area into square cells andconnects the centers of those cells using line segmentsCompared with SCAN and DOUBLE-SCAN the HILBERTcan provide more noncollinear beacon points for unknownnodes To reduce the collinearity during localization Huangand Zaruba proposed two path planning schemes namelyCIRCLES and S-CURVES CIRCLES consists of a sequenceof concentric circles centered within a ROI S-CURVES isbased on SCAN which progressively scans the monitoringarea from left to right taking an ldquo119878rdquo curve Hu et al [19]proposed a mobile anchor centroid localization (MACL)method The mobile anchor traverses the monitoring areafollowing a spiral trajectory while periodically broadcastingbeacon packets which contain its current position and soforth Zhang et al [20] proposed a collaborative localizationscheme using a group of mobile anchor nodes (GMAN) AGMAN is composed of three anchor nodes which form anequilateral triangle and each anchor node locates at one ofthe three vertexes Cui et al [21] introduced five movementtrajectories for 3DWSNs LAYERED-SCAN and LAYERED-CURVE divide the 3D ROI into several layers along oneaxis and regard each layer as a 2D ROI Thus in each layerof LAYERED-SCAN and LAYERED-CURVE the mobileanchor traverses along one dimension using SCAN and S-CURVES respectively TRIPLE-SCAN and TRIPLE-CURVEdivide the ROI into several layers along three axes 3DHILBERT has more turns compared with LAYERED-SCANand TRIPLE-SCAN to overcome collinearity and coplanarityproblemsCui andWang [22] proposed a four-mobile-beaconassisted weighted centroid localization method The fourmobile beacons form a regular tetrahedron and traverse thegiven ROI following the LAYERED-SCAN trajectory whichconsists of several parallel layers of SCAN
212 Dynamic Path Planning Scheme A large amount ofdynamic path planning schemes were proposed to considerthe real distribution of unknown nodes in the given ROI
Li et al [23] regard a WSN as a connected undirectedgraph They proposed a Breadth-First (BRF) algorithm and aBacktracking Greedy (BTG) algorithm to transform the pathplanning issue into seeking spanning trees of the undirectedgraph and traversing through the graphThus the movementtrajectory of the mobile anchor node changes dynamicallyaccordingly to the distribution of unknown nodes Fu etal proposed a novel dynamic movement trajectory basedon virtual force which is constructed by interaction forcebetween mobile anchor and unknown nodes [24] Eachunknown node is equippedwith an omnidirectional antenna
The Scientific World Journal 3
The mobile anchor uses directional antennas to receivefeedback messages from unknown nodes and calculates thetotal virtual force on itself In [25] threemobile anchors forma regular triangle with the length of its communication rangeand move in a ROI Unknown nodes that do not know theirown positions request the mobile anchor to deliver morebeacon messages The mobile anchor decides its movementtrajectory on the basis of the received request messages In[26] six optional positions are provided to be chosen basedon geometry The mobile anchor finds a new position amongthe six optional positions The unknown node with mostneighbors has the most chance to be the next position of themobile beacon
22 Localization Scheme Another research issue of mobileanchor assisted localization algorithm is to design local-ization scheme by which unknown nodes calculate theirpositions based on beacon points received from mobileanchors
Ssu et al [27] developed a localization mechanism usingthe geometry conjecture that is perpendicular bisector ofa chord If any two chords are obtained the location ofthe sensor node can be easily computed based on theconjecture In [28] instead of using the absolute RSSI valuesby contrasting the measured RSSI values from the mobilebeacon to a sensor node perpendicular intersection (PI)utilizes the geometric relation of PI to compute the positionof the node Guerrero et al [29] intruded an azimuthallydefined area localization (ADAL) algorithm which utilizes abeaconwith a rotary directional antenna to sendmessage in adetermined azimuth periodically and an unknown node usesthe centroid of intersection area of several beaconmessages asits position Arrival and departure overlap (ADO) [30] uses apossible area delimited by two circles with the same radius atdifferent centers To estimate its position an unknown nodeshould obtain prearrival position arrival position departureposition and postdeparture position of the moving beaconto compute its ADO To improve the localization accuracyof Ssursquos scheme Lee et al [31] proposed a method based ongeometric constraints utilizing three beacon points wheretwo are used for obtaining the intersection area and thethird is used further to delimit this area The borderlinemeasurement schemes determine some straight lines thatpass through a sensor node and use the intersection point ofthese lines as its position
3 Network Model and Theoretical Background
31 Network Architecture and Assumptions Network archi-tecture of this paper is shown in Figure 2 There are twotypes of sensor nodes in the network namely unknownnode and mobile anchor All the sensor nodes have thesame communication rang Unknown nodes are deployeduniformly in the ROI The mobile anchor travels amongunknown nodes following the predefined trajectory whileperiodically broadcasting its current location to help nearbyunknown nodes with localization Unknown nodes estimatedistances to themobile anchor by using RSSI technique Once
Mobile anchor
Movement trajectoryUnknown node
R
Figure 2 Network architecture
an unknown node receives at least three noncollinear anchorpoints it will calculate its position by using trilaterationmethod
Two assumptions are made
(a) The mobile anchor has sufficient energy for movingand broadcasting anchor packets during localizationThe speed of the mobile anchor is adjustable anduniform in the process of localization
(b) The communication model is perfect spherical radiopropagation and there existsmeasurement errorsThemobile anchor has identical communication range119903 at all anchor points Only the sensors within thecommunication range are assumed to be able toreceive anchor packets sent by the mobile anchor
32Theoretical Background In a two-dimensional ROI sup-pose that the unknown node 119901(119909
0 1199100) can receive three
anchor coordinates 119901119894(119909119894 119910119894) 119894 = 1 2 3 Distances between 119901
and 119901119894are 119903119894 119894 = 1 2 3 Assume that the measurement error
ranges from minus120576119894to 120576119894 120576119894gt 0 Thus we can obtain
119862119901119894
= (119909 119910) | (119903119894minus 120576119894)2le (119909 + 119909
119894)2+ (119910 + 119910
119894)2le (119903119894+ 120576119894)2
119894 = 1 2 3
(1)
Unknown node calculates its coordinates by using of thetrilateration Thus the localization error is defined as
area (119862119901119894) = (119909 119910) | 119909 isin
3
⋂
119894=1
119862119901119894 119910 isin
3
⋂
119894=1
119862119901119894 (2)
4 The Scientific World Journal
p2
p3
p1
q32q22
q12
q31q21
q11
lq12
p
Figure 3 Analysis of localization error
When themeasurement error 120576 is relatively small119862119901119894can
be linearized and approximated by 119862119901119894 We proved that the
localization error is the smallest when three anchor nodesare placed symmetrically namely three anchor nodes forma regular triangle [32] As shown in Figure 3 let 119897
119901119901119894be the
straight line passing through both 119901 and 119901119894 Thus 119897
119901119901119894will
intersect with 119878119901at two points 119902
1198941and 119902
1198942 For 119895 = 1 2 we
define the line passing through 119902119894119895and tangent to 119878
119901as 119902119894119895
Therefore [32]
area (119862) = 21205762 (tan12057212
2+ tan
12057223
2+ tan
12057231
2) (3)
Note that
12057212+ 12057223+ 12057231= 120587 (4)
Since (tan119909)10158401015840 = 2 tan119909(1+tan119909) ge 0 when 0 le 119909 le 1205872we thus obtain
area (119862) = 61205762 13(tan
12057212
2+ tan
12057223
2+ tan
12057231
2)
ge 61205762 tan
12057212+ 12057223+ 12057231
6= 61205762 tan 120587
6
(5)
The equality holds when
12057212= 12057223= 12057231=120587
3 (6)
In other words the localization error is the smallest whenthree anchor nodes form a regular triangle
4 Mobile Anchor Assisted Localization
The problem of path planning for mobile anchor is to designmovement trajectory satisfying the following properties (i)it should pass closely to as many potential node positions
as possible aiming at localizing as many unknown nodes aspossible (ii) it should provide each unknown node with atleast three (four) noncollinear (noncoplanar) anchor pointsin a 2D (3D) WSN to achieve unique estimation of knownnodersquos position (iii) it should be as short as possible to reducethe energy consumption of mobile anchors and time forlocalization
The performances of mobile anchor assisted localizationalgorithm are influenced by the following factors
(a) Communication range a larger communicationrange of the mobile anchor covers more unknownnodes Thus the unknown nodes have more choicesto select appropriate anchor points to calculate theircoordinates
(b) Movement trajectory a well designed movement tra-jectory can eliminate collinearity (coplanarity) prob-lem and make full use of the real-time informationthat is the distribution of unknown nodes environ-ment information and so forth
(c) Broadcast interval a shorter broadcast intervalmeansthat the mobile anchor would broadcast its locationmore frequently which may bring about a betterlocalization performance
(d) Path length a longer path length means that themobile anchor hasmore opportunities to broadcast itslocation and pass by more unknown nodes howeverit will consume more energy
Thus we should solve the above four problems whendesigning a mobile anchor assisted localization algorithm
41 MAALRH The general procedure of MAALRH consistsof four steps as shown in Algorithm 1
411 Network Segmentation We assume that the ROI is asquare We divide the ROI into several subrectangles accord-ing to the length of the square The communication rangeof mobile anchor nodes can be adjusted according to thelength of subrectangles The distance between two successivesegments of the subrectangles is defined as the resolution(119877) Figure 4 gives an example of network segmentation Thelength of the ROI is 119871 The square can be divided into 119899subrectangles which satisfy 119871 = 119899119877 119899 isin 119873lowast
412 Movement Trajectory Assume that the ROI is a squarewith the area of 119871 times 119871 the vertex coordinates of the ROIare (119909min 119910min) (119909max 119910min) (119909min 119910max) and (119909max 119910max)respectively The mobile anchor is initially located at thecentroid of the ROI The initial coordinates of the mobileanchor can be calculated by using
1199090=
1003816100381610038161003816119909max1003816100381610038161003816 minus
1003816100381610038161003816119909min1003816100381610038161003816
2
1199100=
1003816100381610038161003816119910max1003816100381610038161003816 minus
1003816100381610038161003816119910min1003816100381610038161003816
2
(7)
The Scientific World Journal 5
Step 1The ROI is divided into 119899 subrectangles which satisfy 119871 = 119899119877 119899 isin 119873lowast The communication range of the mobileanchor is equal to the resolution that is 119877 = 119903Step 2Themobile anchor traverses the ROI following the regular hexagon movement trajectory (the concretely movementtrajectory is depicted in Figures 5 and 7) while periodically broadcasting anchor packets 119879send (119909119894 119910119894) 119868119863 where 119879senddenotes the sending time (119909
119894 119910119894) stands for its current location and 119868119863 represents the packet 119868119863
Step 3 Unknown nodes receive the anchor packets broadcasted by the mobile anchor and estimate distances to themby using the RSSI techniqueStep 4 Each unknown node decides if any of the three noncoplanar anchor coordinates can almost form a regulartriangle and if it is within the regular triangle If so the unknown node calculates its location by using the trilateration
Algorithm 1 MAALRH algorithm
R
L = nR
Figure 4 An example of network segmentation
The mobile anchor traverses the entire ROI following theregular hexagon trajectory at the speed of V and broadcasts itscurrent location (119909
119894 119910119894)with an interval119879 and a communica-
tion range 119903 as depicted in Figure 5A rectangular coordinate system is constructed with the
origin at (1199090 1199100) At first the mobile anchor moves from
(1199090 1199100) to one of the vertexes of the regular hexagon with
the side length of 119877 for instance the mobile anchor movesfrom (119909
0 1199100) to (minus(12)119877 (radic32)119877)Then themobile anchor
moves along the sides of the first regular hexagon with theside length of 119877 When the mobile anchor arrives at the point(minus(12)119877 (radic32)119877) once again it moves to (minus119877radic3119877) andthen moves along the sides of the second regular hexagonwith the side length of 2119877 The side length of regularhexagons increases by 119877 each time and the mobile anchortraverses the ROI along the sides of 1198992 regular hexagonsThe cycle repeats until the mobile anchor arrives at thepoint (minus(1198994)119877 (119899radic34)119877) twice Thus the total path lengthwithout a boundary compensation method can be calculatedby using
1198711015840
MAALRH =3
41198992119877 +
3
2119899119877 =
3
4
1198712
119877+3
2119871 (8)
Mobile anchorUnknown nodeMovement trajectory
(minusn4R
nradic3
4R)
(x0 y0)
(minusR radic3R)(minusR
2radic3
2R)
Figure 5 Movement trajectory of MAALRH without a boundarycompensation method
Thus for a givenROI the total path length depends on the119877 A smaller 119877 results in a lager path length Since 119877 = V119879with the same movement speed the smaller 119877 is the lessanchor packets are broadcasted By this means the broad-casted anchor points form many regular triangles
413 Boundary Compensation Method Since the regularhexagon movement trajectory leaves four corners of ROIuncovered to improve localization ratio we present a bound-ary compensation method to enhance the MAALRH InBCM mobile anchor travels in the sensing area which islarger than the ROI as shown in Figure 6 Unknown nodesare deployed uniformly in the ROI while mobile anchormoves in the sensing area according to the movementtrajectory Assume that the length of the ROI is 119871 the lengthof the sensing area is 1198711015840 the relation of 119871 and 119871
1015840 can beexpressed as 1198711015840 = 119871 + 119883 119883 isin 119877
+ and 119883 is determined
6 The Scientific World Journal
R
R
Sensing area
ROI
L
X
Unknown nodeMobile anchor Anchor point
L998400
R
Figure 6 The relation of sensing area and ROI
by the movement trajectory and the communication range ofmobile anchor In other words by enlarging movement areaofmobile anchor theROI can be traversed entirelyThereforeunknown nodes which are at the boundary of the ROI can belocalized
We choose 119883 = 2119877 here Thus when the mobile anchorarrives at the point ((minus1198994)119877 (119899radic34)119877) once again after itmoves along the (1198992)th regular hexagon with the side lengthof 3119899119877 the mobile anchor moves to (minus((119899 + 2)4)119877 ((119899 +2)radic34)119877) and moves along the 1198992 + 1th regular hexagonwith the side length of (3119899 + 6)119877 Then the mobile anchormoves to (minus((119899+4)4)119877 ((119899+4)radic34)119877) andmoves along the1198992+2th regular hexagon with the side length of (3119899+12)119877 toensure that unknown nodes at the boundary of the ROI couldfall inside the overlapping communication ranges of at leastthree noncollinear anchors as shown in Figure 7
Thus path length of the MAALRH with a boundarycompensation method can be calculated by using
119871MAALRH =3
41198992119877 +
15
2119899119877 + 18119877 (9)
414 Trilateration An example of the trilateration is shownin Figure 8 Suppose that the unknown node119863(119909 119910) receivesthree anchor packets from the mobile anchor namely119860(119909119886 119910119886) 119861(119909
119887 119910119887) and 119862(119909
119888 119910119888) Distances between 119860 119861
119862 and 119863 are 119889119886 119889119887 and 119889
119888 respectively Since the unknown
node 119863 is within the regular triangle which is composed of119860 119861 and 119862 unknown node 119863 will calculate its location byusing
(119909 minus 119909119886)2+ (119910 minus 119910
119886)2= 1198892
119886
(119909 minus 119909119887)2+ (119910 minus 119910
119887)2= 1198892
119887
(119909 minus 119909119888)2+ (119910 minus 119910
119888)2= 1198892
119888
(10)
Sensing area
ROI
X
Mobile anchorUnknown nodeMovement trajectory
minus(n + 4)
4R
(n + 4)radic3
4R( )
minus(n + 2)
4R
(n + 2)radic3
4R)(
minusn
4R
nradic3
4R)(
(x0 y0)
Figure 7 Movement trajectory ofMAALRHwith a boundary com-pensation method
Hence
119863(119909 119910)119879=1
2119860minus1119861 (11)
where
A = (119909119886minus 119909119888119910119886minus 119910119888
119909119887minus 119909119888119910119887minus 119910119888
)
B = (1199092
119886minus 1199092
119888+ 1199102
119886minus 1199102
119888+ 1198892
119888minus 1198892
119886
1199092
119887minus 1199092
119888+ 1199102
119887minus 1199102
119888+ 1198892
119888minus 1198892
119887
)
(12)
42 Comparing Algorithms Various path planning schemeshave been proposed for single mobile anchor assisted local-ization We choose HILBERT CIRCLES and S-CURVES tobe compared with our proposed MAALRH
421 HILBERT HILBERT can reduce the collinearity with-out significantly increasing the path length compared withSCAN and DOUBLE-SCAN A level-n HILBERT curvedivides the 119871 times 119871 ROI into 4
119899 square cells and connectsthe centers of those cells using 4119899 line segments [17] Theresolution of the HILBERT curve is defined as the length ofeach line segment Thus 119871 119877 and 119899 satisfy 4119899 = (119871119877) times
(119871119877) Therefore the path length of HILBERT curve can becalculated by using
119871HILBERT = 1198992times 119877 (13)
422 CIRCLES CIRCLES consists of a sequence of concen-tric circles centered within the ROI [18] The resolution is
The Scientific World Journal 7
da
dbdc
Mobile anchorUnknown node
A(xa ya)
B(xb yb) C(xc yc)D(x y)
Figure 8 An example of the trilateration
defined as the diameter of the innermost circle For each outercircle the radius is increased by 119877 sequentially CIRCLEScan reduce collinearity of the anchor points all areas withinthe concentric circles can be localized However CIRCLESleaves four corners of the ROI uncovered The path length ofCIRCLES can be calculated by using
119871CIRCLES =1198992120587119877
4+ (
119899
2minus 1)119877 (14)
423 S-CURVES S-CURVES is based on the SCAN whichprogressively scans the ROI from left to right However S-CURVES takes an ldquo119878rdquo curve instead of moving in a straightline [18] For a 119871 times 119871 ROI and a resolution of 119877 there arelfloor2(119899minus1)3rfloor+1 curve Each vertical ldquo119878rdquo curve consists of 119899minus1semicircle with the radius of 1198772 Therefore the path lengthof S-CURVES can be calculated by using
119871S-CURVES =(119899 minus 1) 120587119877
2(lfloor2 (119899 minus 1)
3rfloor + 1)
+ (119899 minus 2) 119877 +120587119877
2
(15)
5 Performance Evaluation
51 Evaluation Criteria
Localization Ratio Localization ratio is the ratio of the num-ber of localizable unknown nodes to the number of unknownnodes This metric also indicates the coverage degree of themovement trajectory Localization ratio is defined as
119871 ratio =119873119897
119873119900
(16)
Table 1 Parameters used in the simulation
ROI size 480m times 480mCommunication range 60ndash140mResolution 60m 80m and 120mMovement speed 10msNumber of unknown nodes 100ndash500
where119873119897is the number of localizable unknown nodes and119873
119900
is the number of unknown nodes
Localization Accuracy The localization error of unknownnode 119894 is defined as
119890119894=
radic(119906119894minus 119909119894)2+ (V119894minus 119910119894)2+ (119908119894minus 119911119894)2
119903
(17)
where (119906119894 V119894 119908119894) are real coordinates of an unknown node 119894
(119909119894 119910119894 119911119894) are estimated coordinates of an unknown node 119894
and 119903 is the communication range of sensor nodesWe evaluate the localization accuracy by using average
and standard deviation of localization errors of unknownnodes which are defined as
120583119890=1
119873119897
119873119897
sum
119894=1
119890119894
120590119890= radic
1
119873119897
119873119897
sum
119894=1
(119890119894minus 120583119890)2
(18)
where 119873119897is the number of localizable unknown nodes in a
WSN
Path Length To save energy consumption and time forlocalization the path length of the mobile anchor nodeshould be as short as possible
Scalability Scalability means that the localization perfor-mance is independent of the unknown nodes density
52 Experiment Parameters Our simulations are performedusing Matlab Suppose that the ROI is a square Table 1 listsparameters used in simulations Five movement trajecto-ries are compared in this section HILBERT CIRCLES S-CURVES MAALRH and MAALRH BCM (we name theMAALRH with the boundary compensation method asMAALRH BCM) The trilateration is used to calculate coor-dinates of unknown nodes To ensure reliability of evaluationresults 50 simulation runs were performed for each set ofsimulation condition with a different uniform deploymentof unknown nodes on each occasion
53 Simulations and Analysis We evaluate performances offive movement trajectories under three resolutions 60m80m and 120m in terms of localization ratio localizationaccuracy path length and scalability
8 The Scientific World Journal
60 80 100 120 140
Communication range (m)
0
25
50
75
100Lo
caliz
atio
n ra
tio (
)
(a) 119877 = 60
0
25
50
75
100
Loca
lizat
ion
ratio
()
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
0
25
50
75
100
Loca
lizat
ion
ratio
()
(c) 119877 = 120
Figure 9 Localization ratio with different resolutions
531 Localization Ratio Figure 9 depicts the relation be-tween localization ratios and communication ranges underthree resolutions The MAALRH BCM outperforms HIL-BERT CIRCLES and S-CURVES and MAALRH in generalLocalization ratios of MAALRH BCM and HILBERT aresimilar when the communication range is not smaller thanthe resolution Localization ratio of S-CURVES is largerthan that of MAALRH and CIRCLES since MAALRH andCIRCLES leave four corners of ROI uncovered Localizationratio of MAALRH BCM can reach 100 as long as thecommunication range is not smaller than the resolutionsince unknown nodes can receive three noncollinear anchorpoints which can form a regular triangle to estimate theirpositions When the resolution is relatively small that is 119877 =60m localization ratios increase rapidly with the increase ofthe communication range and the localization ratios of the
five algorithms can all reach 100 when the communicationrange is 140m However with the increase of the resolutionthe mobile anchor dose not broadcast anchor packets asfrequently as in the previous case (ie 119877 = 60) onlyMAALRH BCM and HILBERT can reach 100 localizationratio (ie 119877 = 80m and 119877 = 120m) That is becausewith the boundary compensation method MAALRH BCMcan provide noncollinear anchor points to ensure that themovement trajectory can cover the entire ROI When theresolution is much larger than the communication rangeunknown nodes cannot receive enough anchor points toestimate their coordinates which results in zero localizationratios For MAALRH and CIRCLES the movement trajecto-ries leave four corners of the ROI uncovered and unknownnodes on the boundary of the ROI cannot receive at leastthree noncollinear anchor packets from the mobile anchor
The Scientific World Journal 9
60 80 100 120 14000
02
04
06
08120583e
Communication range (m)
(a) 119877 = 60
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
(b) 119877 = 80
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 10 Average deviation with different resolutions
especially when the resolution is large Thus MAALRH andCIRCLES perform worse compared with the other threealgorithms
From the simulation we can conclude that the local-ization ratio depends on the communication range of thesensor nodes and the resolution of the movement trajectorywhich determines the amount and the distance interval of theanchor points
532 Localization Accuracy Figure 10 presents the variationof 120583119890under three resolutions We can observe that with
the increase of the resolution 120583119890increase correspondingly
because distance between two neighboring anchor pointsincreases with the increase of the resolution and results ina larger measurement error MAALRH and MAALRH BCM
almost have the same average deviation since both ofthem use three anchor points which form a regular trian-gle to estimate unknown nodesrsquo coordinates Besides theMAALRH BCM has a boundary comprehension methodto ensure the localization accuracy of all the unknownnodes within a ROI HILBERT and S-CURVES have largeraverage deviations compared with that of MAALRH andMAALRH BCM CIRCLES performs worst among the fivemovement trajectories Because in HILBERT CIRCLESand S-CURVES ordinary nodes randomly select threenoncollinear anchor points to calculate their positions 120583
119890
of MAALRH MAALRH BCM HILBERT and S-CURVESdecrease apparently when the communication range is equalto the resolution (with the variation from 60m to 140m)because more unknown nodes can receive three noncoplanar
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 3
The mobile anchor uses directional antennas to receivefeedback messages from unknown nodes and calculates thetotal virtual force on itself In [25] threemobile anchors forma regular triangle with the length of its communication rangeand move in a ROI Unknown nodes that do not know theirown positions request the mobile anchor to deliver morebeacon messages The mobile anchor decides its movementtrajectory on the basis of the received request messages In[26] six optional positions are provided to be chosen basedon geometry The mobile anchor finds a new position amongthe six optional positions The unknown node with mostneighbors has the most chance to be the next position of themobile beacon
22 Localization Scheme Another research issue of mobileanchor assisted localization algorithm is to design local-ization scheme by which unknown nodes calculate theirpositions based on beacon points received from mobileanchors
Ssu et al [27] developed a localization mechanism usingthe geometry conjecture that is perpendicular bisector ofa chord If any two chords are obtained the location ofthe sensor node can be easily computed based on theconjecture In [28] instead of using the absolute RSSI valuesby contrasting the measured RSSI values from the mobilebeacon to a sensor node perpendicular intersection (PI)utilizes the geometric relation of PI to compute the positionof the node Guerrero et al [29] intruded an azimuthallydefined area localization (ADAL) algorithm which utilizes abeaconwith a rotary directional antenna to sendmessage in adetermined azimuth periodically and an unknown node usesthe centroid of intersection area of several beaconmessages asits position Arrival and departure overlap (ADO) [30] uses apossible area delimited by two circles with the same radius atdifferent centers To estimate its position an unknown nodeshould obtain prearrival position arrival position departureposition and postdeparture position of the moving beaconto compute its ADO To improve the localization accuracyof Ssursquos scheme Lee et al [31] proposed a method based ongeometric constraints utilizing three beacon points wheretwo are used for obtaining the intersection area and thethird is used further to delimit this area The borderlinemeasurement schemes determine some straight lines thatpass through a sensor node and use the intersection point ofthese lines as its position
3 Network Model and Theoretical Background
31 Network Architecture and Assumptions Network archi-tecture of this paper is shown in Figure 2 There are twotypes of sensor nodes in the network namely unknownnode and mobile anchor All the sensor nodes have thesame communication rang Unknown nodes are deployeduniformly in the ROI The mobile anchor travels amongunknown nodes following the predefined trajectory whileperiodically broadcasting its current location to help nearbyunknown nodes with localization Unknown nodes estimatedistances to themobile anchor by using RSSI technique Once
Mobile anchor
Movement trajectoryUnknown node
R
Figure 2 Network architecture
an unknown node receives at least three noncollinear anchorpoints it will calculate its position by using trilaterationmethod
Two assumptions are made
(a) The mobile anchor has sufficient energy for movingand broadcasting anchor packets during localizationThe speed of the mobile anchor is adjustable anduniform in the process of localization
(b) The communication model is perfect spherical radiopropagation and there existsmeasurement errorsThemobile anchor has identical communication range119903 at all anchor points Only the sensors within thecommunication range are assumed to be able toreceive anchor packets sent by the mobile anchor
32Theoretical Background In a two-dimensional ROI sup-pose that the unknown node 119901(119909
0 1199100) can receive three
anchor coordinates 119901119894(119909119894 119910119894) 119894 = 1 2 3 Distances between 119901
and 119901119894are 119903119894 119894 = 1 2 3 Assume that the measurement error
ranges from minus120576119894to 120576119894 120576119894gt 0 Thus we can obtain
119862119901119894
= (119909 119910) | (119903119894minus 120576119894)2le (119909 + 119909
119894)2+ (119910 + 119910
119894)2le (119903119894+ 120576119894)2
119894 = 1 2 3
(1)
Unknown node calculates its coordinates by using of thetrilateration Thus the localization error is defined as
area (119862119901119894) = (119909 119910) | 119909 isin
3
⋂
119894=1
119862119901119894 119910 isin
3
⋂
119894=1
119862119901119894 (2)
4 The Scientific World Journal
p2
p3
p1
q32q22
q12
q31q21
q11
lq12
p
Figure 3 Analysis of localization error
When themeasurement error 120576 is relatively small119862119901119894can
be linearized and approximated by 119862119901119894 We proved that the
localization error is the smallest when three anchor nodesare placed symmetrically namely three anchor nodes forma regular triangle [32] As shown in Figure 3 let 119897
119901119901119894be the
straight line passing through both 119901 and 119901119894 Thus 119897
119901119901119894will
intersect with 119878119901at two points 119902
1198941and 119902
1198942 For 119895 = 1 2 we
define the line passing through 119902119894119895and tangent to 119878
119901as 119902119894119895
Therefore [32]
area (119862) = 21205762 (tan12057212
2+ tan
12057223
2+ tan
12057231
2) (3)
Note that
12057212+ 12057223+ 12057231= 120587 (4)
Since (tan119909)10158401015840 = 2 tan119909(1+tan119909) ge 0 when 0 le 119909 le 1205872we thus obtain
area (119862) = 61205762 13(tan
12057212
2+ tan
12057223
2+ tan
12057231
2)
ge 61205762 tan
12057212+ 12057223+ 12057231
6= 61205762 tan 120587
6
(5)
The equality holds when
12057212= 12057223= 12057231=120587
3 (6)
In other words the localization error is the smallest whenthree anchor nodes form a regular triangle
4 Mobile Anchor Assisted Localization
The problem of path planning for mobile anchor is to designmovement trajectory satisfying the following properties (i)it should pass closely to as many potential node positions
as possible aiming at localizing as many unknown nodes aspossible (ii) it should provide each unknown node with atleast three (four) noncollinear (noncoplanar) anchor pointsin a 2D (3D) WSN to achieve unique estimation of knownnodersquos position (iii) it should be as short as possible to reducethe energy consumption of mobile anchors and time forlocalization
The performances of mobile anchor assisted localizationalgorithm are influenced by the following factors
(a) Communication range a larger communicationrange of the mobile anchor covers more unknownnodes Thus the unknown nodes have more choicesto select appropriate anchor points to calculate theircoordinates
(b) Movement trajectory a well designed movement tra-jectory can eliminate collinearity (coplanarity) prob-lem and make full use of the real-time informationthat is the distribution of unknown nodes environ-ment information and so forth
(c) Broadcast interval a shorter broadcast intervalmeansthat the mobile anchor would broadcast its locationmore frequently which may bring about a betterlocalization performance
(d) Path length a longer path length means that themobile anchor hasmore opportunities to broadcast itslocation and pass by more unknown nodes howeverit will consume more energy
Thus we should solve the above four problems whendesigning a mobile anchor assisted localization algorithm
41 MAALRH The general procedure of MAALRH consistsof four steps as shown in Algorithm 1
411 Network Segmentation We assume that the ROI is asquare We divide the ROI into several subrectangles accord-ing to the length of the square The communication rangeof mobile anchor nodes can be adjusted according to thelength of subrectangles The distance between two successivesegments of the subrectangles is defined as the resolution(119877) Figure 4 gives an example of network segmentation Thelength of the ROI is 119871 The square can be divided into 119899subrectangles which satisfy 119871 = 119899119877 119899 isin 119873lowast
412 Movement Trajectory Assume that the ROI is a squarewith the area of 119871 times 119871 the vertex coordinates of the ROIare (119909min 119910min) (119909max 119910min) (119909min 119910max) and (119909max 119910max)respectively The mobile anchor is initially located at thecentroid of the ROI The initial coordinates of the mobileanchor can be calculated by using
1199090=
1003816100381610038161003816119909max1003816100381610038161003816 minus
1003816100381610038161003816119909min1003816100381610038161003816
2
1199100=
1003816100381610038161003816119910max1003816100381610038161003816 minus
1003816100381610038161003816119910min1003816100381610038161003816
2
(7)
The Scientific World Journal 5
Step 1The ROI is divided into 119899 subrectangles which satisfy 119871 = 119899119877 119899 isin 119873lowast The communication range of the mobileanchor is equal to the resolution that is 119877 = 119903Step 2Themobile anchor traverses the ROI following the regular hexagon movement trajectory (the concretely movementtrajectory is depicted in Figures 5 and 7) while periodically broadcasting anchor packets 119879send (119909119894 119910119894) 119868119863 where 119879senddenotes the sending time (119909
119894 119910119894) stands for its current location and 119868119863 represents the packet 119868119863
Step 3 Unknown nodes receive the anchor packets broadcasted by the mobile anchor and estimate distances to themby using the RSSI techniqueStep 4 Each unknown node decides if any of the three noncoplanar anchor coordinates can almost form a regulartriangle and if it is within the regular triangle If so the unknown node calculates its location by using the trilateration
Algorithm 1 MAALRH algorithm
R
L = nR
Figure 4 An example of network segmentation
The mobile anchor traverses the entire ROI following theregular hexagon trajectory at the speed of V and broadcasts itscurrent location (119909
119894 119910119894)with an interval119879 and a communica-
tion range 119903 as depicted in Figure 5A rectangular coordinate system is constructed with the
origin at (1199090 1199100) At first the mobile anchor moves from
(1199090 1199100) to one of the vertexes of the regular hexagon with
the side length of 119877 for instance the mobile anchor movesfrom (119909
0 1199100) to (minus(12)119877 (radic32)119877)Then themobile anchor
moves along the sides of the first regular hexagon with theside length of 119877 When the mobile anchor arrives at the point(minus(12)119877 (radic32)119877) once again it moves to (minus119877radic3119877) andthen moves along the sides of the second regular hexagonwith the side length of 2119877 The side length of regularhexagons increases by 119877 each time and the mobile anchortraverses the ROI along the sides of 1198992 regular hexagonsThe cycle repeats until the mobile anchor arrives at thepoint (minus(1198994)119877 (119899radic34)119877) twice Thus the total path lengthwithout a boundary compensation method can be calculatedby using
1198711015840
MAALRH =3
41198992119877 +
3
2119899119877 =
3
4
1198712
119877+3
2119871 (8)
Mobile anchorUnknown nodeMovement trajectory
(minusn4R
nradic3
4R)
(x0 y0)
(minusR radic3R)(minusR
2radic3
2R)
Figure 5 Movement trajectory of MAALRH without a boundarycompensation method
Thus for a givenROI the total path length depends on the119877 A smaller 119877 results in a lager path length Since 119877 = V119879with the same movement speed the smaller 119877 is the lessanchor packets are broadcasted By this means the broad-casted anchor points form many regular triangles
413 Boundary Compensation Method Since the regularhexagon movement trajectory leaves four corners of ROIuncovered to improve localization ratio we present a bound-ary compensation method to enhance the MAALRH InBCM mobile anchor travels in the sensing area which islarger than the ROI as shown in Figure 6 Unknown nodesare deployed uniformly in the ROI while mobile anchormoves in the sensing area according to the movementtrajectory Assume that the length of the ROI is 119871 the lengthof the sensing area is 1198711015840 the relation of 119871 and 119871
1015840 can beexpressed as 1198711015840 = 119871 + 119883 119883 isin 119877
+ and 119883 is determined
6 The Scientific World Journal
R
R
Sensing area
ROI
L
X
Unknown nodeMobile anchor Anchor point
L998400
R
Figure 6 The relation of sensing area and ROI
by the movement trajectory and the communication range ofmobile anchor In other words by enlarging movement areaofmobile anchor theROI can be traversed entirelyThereforeunknown nodes which are at the boundary of the ROI can belocalized
We choose 119883 = 2119877 here Thus when the mobile anchorarrives at the point ((minus1198994)119877 (119899radic34)119877) once again after itmoves along the (1198992)th regular hexagon with the side lengthof 3119899119877 the mobile anchor moves to (minus((119899 + 2)4)119877 ((119899 +2)radic34)119877) and moves along the 1198992 + 1th regular hexagonwith the side length of (3119899 + 6)119877 Then the mobile anchormoves to (minus((119899+4)4)119877 ((119899+4)radic34)119877) andmoves along the1198992+2th regular hexagon with the side length of (3119899+12)119877 toensure that unknown nodes at the boundary of the ROI couldfall inside the overlapping communication ranges of at leastthree noncollinear anchors as shown in Figure 7
Thus path length of the MAALRH with a boundarycompensation method can be calculated by using
119871MAALRH =3
41198992119877 +
15
2119899119877 + 18119877 (9)
414 Trilateration An example of the trilateration is shownin Figure 8 Suppose that the unknown node119863(119909 119910) receivesthree anchor packets from the mobile anchor namely119860(119909119886 119910119886) 119861(119909
119887 119910119887) and 119862(119909
119888 119910119888) Distances between 119860 119861
119862 and 119863 are 119889119886 119889119887 and 119889
119888 respectively Since the unknown
node 119863 is within the regular triangle which is composed of119860 119861 and 119862 unknown node 119863 will calculate its location byusing
(119909 minus 119909119886)2+ (119910 minus 119910
119886)2= 1198892
119886
(119909 minus 119909119887)2+ (119910 minus 119910
119887)2= 1198892
119887
(119909 minus 119909119888)2+ (119910 minus 119910
119888)2= 1198892
119888
(10)
Sensing area
ROI
X
Mobile anchorUnknown nodeMovement trajectory
minus(n + 4)
4R
(n + 4)radic3
4R( )
minus(n + 2)
4R
(n + 2)radic3
4R)(
minusn
4R
nradic3
4R)(
(x0 y0)
Figure 7 Movement trajectory ofMAALRHwith a boundary com-pensation method
Hence
119863(119909 119910)119879=1
2119860minus1119861 (11)
where
A = (119909119886minus 119909119888119910119886minus 119910119888
119909119887minus 119909119888119910119887minus 119910119888
)
B = (1199092
119886minus 1199092
119888+ 1199102
119886minus 1199102
119888+ 1198892
119888minus 1198892
119886
1199092
119887minus 1199092
119888+ 1199102
119887minus 1199102
119888+ 1198892
119888minus 1198892
119887
)
(12)
42 Comparing Algorithms Various path planning schemeshave been proposed for single mobile anchor assisted local-ization We choose HILBERT CIRCLES and S-CURVES tobe compared with our proposed MAALRH
421 HILBERT HILBERT can reduce the collinearity with-out significantly increasing the path length compared withSCAN and DOUBLE-SCAN A level-n HILBERT curvedivides the 119871 times 119871 ROI into 4
119899 square cells and connectsthe centers of those cells using 4119899 line segments [17] Theresolution of the HILBERT curve is defined as the length ofeach line segment Thus 119871 119877 and 119899 satisfy 4119899 = (119871119877) times
(119871119877) Therefore the path length of HILBERT curve can becalculated by using
119871HILBERT = 1198992times 119877 (13)
422 CIRCLES CIRCLES consists of a sequence of concen-tric circles centered within the ROI [18] The resolution is
The Scientific World Journal 7
da
dbdc
Mobile anchorUnknown node
A(xa ya)
B(xb yb) C(xc yc)D(x y)
Figure 8 An example of the trilateration
defined as the diameter of the innermost circle For each outercircle the radius is increased by 119877 sequentially CIRCLEScan reduce collinearity of the anchor points all areas withinthe concentric circles can be localized However CIRCLESleaves four corners of the ROI uncovered The path length ofCIRCLES can be calculated by using
119871CIRCLES =1198992120587119877
4+ (
119899
2minus 1)119877 (14)
423 S-CURVES S-CURVES is based on the SCAN whichprogressively scans the ROI from left to right However S-CURVES takes an ldquo119878rdquo curve instead of moving in a straightline [18] For a 119871 times 119871 ROI and a resolution of 119877 there arelfloor2(119899minus1)3rfloor+1 curve Each vertical ldquo119878rdquo curve consists of 119899minus1semicircle with the radius of 1198772 Therefore the path lengthof S-CURVES can be calculated by using
119871S-CURVES =(119899 minus 1) 120587119877
2(lfloor2 (119899 minus 1)
3rfloor + 1)
+ (119899 minus 2) 119877 +120587119877
2
(15)
5 Performance Evaluation
51 Evaluation Criteria
Localization Ratio Localization ratio is the ratio of the num-ber of localizable unknown nodes to the number of unknownnodes This metric also indicates the coverage degree of themovement trajectory Localization ratio is defined as
119871 ratio =119873119897
119873119900
(16)
Table 1 Parameters used in the simulation
ROI size 480m times 480mCommunication range 60ndash140mResolution 60m 80m and 120mMovement speed 10msNumber of unknown nodes 100ndash500
where119873119897is the number of localizable unknown nodes and119873
119900
is the number of unknown nodes
Localization Accuracy The localization error of unknownnode 119894 is defined as
119890119894=
radic(119906119894minus 119909119894)2+ (V119894minus 119910119894)2+ (119908119894minus 119911119894)2
119903
(17)
where (119906119894 V119894 119908119894) are real coordinates of an unknown node 119894
(119909119894 119910119894 119911119894) are estimated coordinates of an unknown node 119894
and 119903 is the communication range of sensor nodesWe evaluate the localization accuracy by using average
and standard deviation of localization errors of unknownnodes which are defined as
120583119890=1
119873119897
119873119897
sum
119894=1
119890119894
120590119890= radic
1
119873119897
119873119897
sum
119894=1
(119890119894minus 120583119890)2
(18)
where 119873119897is the number of localizable unknown nodes in a
WSN
Path Length To save energy consumption and time forlocalization the path length of the mobile anchor nodeshould be as short as possible
Scalability Scalability means that the localization perfor-mance is independent of the unknown nodes density
52 Experiment Parameters Our simulations are performedusing Matlab Suppose that the ROI is a square Table 1 listsparameters used in simulations Five movement trajecto-ries are compared in this section HILBERT CIRCLES S-CURVES MAALRH and MAALRH BCM (we name theMAALRH with the boundary compensation method asMAALRH BCM) The trilateration is used to calculate coor-dinates of unknown nodes To ensure reliability of evaluationresults 50 simulation runs were performed for each set ofsimulation condition with a different uniform deploymentof unknown nodes on each occasion
53 Simulations and Analysis We evaluate performances offive movement trajectories under three resolutions 60m80m and 120m in terms of localization ratio localizationaccuracy path length and scalability
8 The Scientific World Journal
60 80 100 120 140
Communication range (m)
0
25
50
75
100Lo
caliz
atio
n ra
tio (
)
(a) 119877 = 60
0
25
50
75
100
Loca
lizat
ion
ratio
()
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
0
25
50
75
100
Loca
lizat
ion
ratio
()
(c) 119877 = 120
Figure 9 Localization ratio with different resolutions
531 Localization Ratio Figure 9 depicts the relation be-tween localization ratios and communication ranges underthree resolutions The MAALRH BCM outperforms HIL-BERT CIRCLES and S-CURVES and MAALRH in generalLocalization ratios of MAALRH BCM and HILBERT aresimilar when the communication range is not smaller thanthe resolution Localization ratio of S-CURVES is largerthan that of MAALRH and CIRCLES since MAALRH andCIRCLES leave four corners of ROI uncovered Localizationratio of MAALRH BCM can reach 100 as long as thecommunication range is not smaller than the resolutionsince unknown nodes can receive three noncollinear anchorpoints which can form a regular triangle to estimate theirpositions When the resolution is relatively small that is 119877 =60m localization ratios increase rapidly with the increase ofthe communication range and the localization ratios of the
five algorithms can all reach 100 when the communicationrange is 140m However with the increase of the resolutionthe mobile anchor dose not broadcast anchor packets asfrequently as in the previous case (ie 119877 = 60) onlyMAALRH BCM and HILBERT can reach 100 localizationratio (ie 119877 = 80m and 119877 = 120m) That is becausewith the boundary compensation method MAALRH BCMcan provide noncollinear anchor points to ensure that themovement trajectory can cover the entire ROI When theresolution is much larger than the communication rangeunknown nodes cannot receive enough anchor points toestimate their coordinates which results in zero localizationratios For MAALRH and CIRCLES the movement trajecto-ries leave four corners of the ROI uncovered and unknownnodes on the boundary of the ROI cannot receive at leastthree noncollinear anchor packets from the mobile anchor
The Scientific World Journal 9
60 80 100 120 14000
02
04
06
08120583e
Communication range (m)
(a) 119877 = 60
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
(b) 119877 = 80
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 10 Average deviation with different resolutions
especially when the resolution is large Thus MAALRH andCIRCLES perform worse compared with the other threealgorithms
From the simulation we can conclude that the local-ization ratio depends on the communication range of thesensor nodes and the resolution of the movement trajectorywhich determines the amount and the distance interval of theanchor points
532 Localization Accuracy Figure 10 presents the variationof 120583119890under three resolutions We can observe that with
the increase of the resolution 120583119890increase correspondingly
because distance between two neighboring anchor pointsincreases with the increase of the resolution and results ina larger measurement error MAALRH and MAALRH BCM
almost have the same average deviation since both ofthem use three anchor points which form a regular trian-gle to estimate unknown nodesrsquo coordinates Besides theMAALRH BCM has a boundary comprehension methodto ensure the localization accuracy of all the unknownnodes within a ROI HILBERT and S-CURVES have largeraverage deviations compared with that of MAALRH andMAALRH BCM CIRCLES performs worst among the fivemovement trajectories Because in HILBERT CIRCLESand S-CURVES ordinary nodes randomly select threenoncollinear anchor points to calculate their positions 120583
119890
of MAALRH MAALRH BCM HILBERT and S-CURVESdecrease apparently when the communication range is equalto the resolution (with the variation from 60m to 140m)because more unknown nodes can receive three noncoplanar
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 The Scientific World Journal
p2
p3
p1
q32q22
q12
q31q21
q11
lq12
p
Figure 3 Analysis of localization error
When themeasurement error 120576 is relatively small119862119901119894can
be linearized and approximated by 119862119901119894 We proved that the
localization error is the smallest when three anchor nodesare placed symmetrically namely three anchor nodes forma regular triangle [32] As shown in Figure 3 let 119897
119901119901119894be the
straight line passing through both 119901 and 119901119894 Thus 119897
119901119901119894will
intersect with 119878119901at two points 119902
1198941and 119902
1198942 For 119895 = 1 2 we
define the line passing through 119902119894119895and tangent to 119878
119901as 119902119894119895
Therefore [32]
area (119862) = 21205762 (tan12057212
2+ tan
12057223
2+ tan
12057231
2) (3)
Note that
12057212+ 12057223+ 12057231= 120587 (4)
Since (tan119909)10158401015840 = 2 tan119909(1+tan119909) ge 0 when 0 le 119909 le 1205872we thus obtain
area (119862) = 61205762 13(tan
12057212
2+ tan
12057223
2+ tan
12057231
2)
ge 61205762 tan
12057212+ 12057223+ 12057231
6= 61205762 tan 120587
6
(5)
The equality holds when
12057212= 12057223= 12057231=120587
3 (6)
In other words the localization error is the smallest whenthree anchor nodes form a regular triangle
4 Mobile Anchor Assisted Localization
The problem of path planning for mobile anchor is to designmovement trajectory satisfying the following properties (i)it should pass closely to as many potential node positions
as possible aiming at localizing as many unknown nodes aspossible (ii) it should provide each unknown node with atleast three (four) noncollinear (noncoplanar) anchor pointsin a 2D (3D) WSN to achieve unique estimation of knownnodersquos position (iii) it should be as short as possible to reducethe energy consumption of mobile anchors and time forlocalization
The performances of mobile anchor assisted localizationalgorithm are influenced by the following factors
(a) Communication range a larger communicationrange of the mobile anchor covers more unknownnodes Thus the unknown nodes have more choicesto select appropriate anchor points to calculate theircoordinates
(b) Movement trajectory a well designed movement tra-jectory can eliminate collinearity (coplanarity) prob-lem and make full use of the real-time informationthat is the distribution of unknown nodes environ-ment information and so forth
(c) Broadcast interval a shorter broadcast intervalmeansthat the mobile anchor would broadcast its locationmore frequently which may bring about a betterlocalization performance
(d) Path length a longer path length means that themobile anchor hasmore opportunities to broadcast itslocation and pass by more unknown nodes howeverit will consume more energy
Thus we should solve the above four problems whendesigning a mobile anchor assisted localization algorithm
41 MAALRH The general procedure of MAALRH consistsof four steps as shown in Algorithm 1
411 Network Segmentation We assume that the ROI is asquare We divide the ROI into several subrectangles accord-ing to the length of the square The communication rangeof mobile anchor nodes can be adjusted according to thelength of subrectangles The distance between two successivesegments of the subrectangles is defined as the resolution(119877) Figure 4 gives an example of network segmentation Thelength of the ROI is 119871 The square can be divided into 119899subrectangles which satisfy 119871 = 119899119877 119899 isin 119873lowast
412 Movement Trajectory Assume that the ROI is a squarewith the area of 119871 times 119871 the vertex coordinates of the ROIare (119909min 119910min) (119909max 119910min) (119909min 119910max) and (119909max 119910max)respectively The mobile anchor is initially located at thecentroid of the ROI The initial coordinates of the mobileanchor can be calculated by using
1199090=
1003816100381610038161003816119909max1003816100381610038161003816 minus
1003816100381610038161003816119909min1003816100381610038161003816
2
1199100=
1003816100381610038161003816119910max1003816100381610038161003816 minus
1003816100381610038161003816119910min1003816100381610038161003816
2
(7)
The Scientific World Journal 5
Step 1The ROI is divided into 119899 subrectangles which satisfy 119871 = 119899119877 119899 isin 119873lowast The communication range of the mobileanchor is equal to the resolution that is 119877 = 119903Step 2Themobile anchor traverses the ROI following the regular hexagon movement trajectory (the concretely movementtrajectory is depicted in Figures 5 and 7) while periodically broadcasting anchor packets 119879send (119909119894 119910119894) 119868119863 where 119879senddenotes the sending time (119909
119894 119910119894) stands for its current location and 119868119863 represents the packet 119868119863
Step 3 Unknown nodes receive the anchor packets broadcasted by the mobile anchor and estimate distances to themby using the RSSI techniqueStep 4 Each unknown node decides if any of the three noncoplanar anchor coordinates can almost form a regulartriangle and if it is within the regular triangle If so the unknown node calculates its location by using the trilateration
Algorithm 1 MAALRH algorithm
R
L = nR
Figure 4 An example of network segmentation
The mobile anchor traverses the entire ROI following theregular hexagon trajectory at the speed of V and broadcasts itscurrent location (119909
119894 119910119894)with an interval119879 and a communica-
tion range 119903 as depicted in Figure 5A rectangular coordinate system is constructed with the
origin at (1199090 1199100) At first the mobile anchor moves from
(1199090 1199100) to one of the vertexes of the regular hexagon with
the side length of 119877 for instance the mobile anchor movesfrom (119909
0 1199100) to (minus(12)119877 (radic32)119877)Then themobile anchor
moves along the sides of the first regular hexagon with theside length of 119877 When the mobile anchor arrives at the point(minus(12)119877 (radic32)119877) once again it moves to (minus119877radic3119877) andthen moves along the sides of the second regular hexagonwith the side length of 2119877 The side length of regularhexagons increases by 119877 each time and the mobile anchortraverses the ROI along the sides of 1198992 regular hexagonsThe cycle repeats until the mobile anchor arrives at thepoint (minus(1198994)119877 (119899radic34)119877) twice Thus the total path lengthwithout a boundary compensation method can be calculatedby using
1198711015840
MAALRH =3
41198992119877 +
3
2119899119877 =
3
4
1198712
119877+3
2119871 (8)
Mobile anchorUnknown nodeMovement trajectory
(minusn4R
nradic3
4R)
(x0 y0)
(minusR radic3R)(minusR
2radic3
2R)
Figure 5 Movement trajectory of MAALRH without a boundarycompensation method
Thus for a givenROI the total path length depends on the119877 A smaller 119877 results in a lager path length Since 119877 = V119879with the same movement speed the smaller 119877 is the lessanchor packets are broadcasted By this means the broad-casted anchor points form many regular triangles
413 Boundary Compensation Method Since the regularhexagon movement trajectory leaves four corners of ROIuncovered to improve localization ratio we present a bound-ary compensation method to enhance the MAALRH InBCM mobile anchor travels in the sensing area which islarger than the ROI as shown in Figure 6 Unknown nodesare deployed uniformly in the ROI while mobile anchormoves in the sensing area according to the movementtrajectory Assume that the length of the ROI is 119871 the lengthof the sensing area is 1198711015840 the relation of 119871 and 119871
1015840 can beexpressed as 1198711015840 = 119871 + 119883 119883 isin 119877
+ and 119883 is determined
6 The Scientific World Journal
R
R
Sensing area
ROI
L
X
Unknown nodeMobile anchor Anchor point
L998400
R
Figure 6 The relation of sensing area and ROI
by the movement trajectory and the communication range ofmobile anchor In other words by enlarging movement areaofmobile anchor theROI can be traversed entirelyThereforeunknown nodes which are at the boundary of the ROI can belocalized
We choose 119883 = 2119877 here Thus when the mobile anchorarrives at the point ((minus1198994)119877 (119899radic34)119877) once again after itmoves along the (1198992)th regular hexagon with the side lengthof 3119899119877 the mobile anchor moves to (minus((119899 + 2)4)119877 ((119899 +2)radic34)119877) and moves along the 1198992 + 1th regular hexagonwith the side length of (3119899 + 6)119877 Then the mobile anchormoves to (minus((119899+4)4)119877 ((119899+4)radic34)119877) andmoves along the1198992+2th regular hexagon with the side length of (3119899+12)119877 toensure that unknown nodes at the boundary of the ROI couldfall inside the overlapping communication ranges of at leastthree noncollinear anchors as shown in Figure 7
Thus path length of the MAALRH with a boundarycompensation method can be calculated by using
119871MAALRH =3
41198992119877 +
15
2119899119877 + 18119877 (9)
414 Trilateration An example of the trilateration is shownin Figure 8 Suppose that the unknown node119863(119909 119910) receivesthree anchor packets from the mobile anchor namely119860(119909119886 119910119886) 119861(119909
119887 119910119887) and 119862(119909
119888 119910119888) Distances between 119860 119861
119862 and 119863 are 119889119886 119889119887 and 119889
119888 respectively Since the unknown
node 119863 is within the regular triangle which is composed of119860 119861 and 119862 unknown node 119863 will calculate its location byusing
(119909 minus 119909119886)2+ (119910 minus 119910
119886)2= 1198892
119886
(119909 minus 119909119887)2+ (119910 minus 119910
119887)2= 1198892
119887
(119909 minus 119909119888)2+ (119910 minus 119910
119888)2= 1198892
119888
(10)
Sensing area
ROI
X
Mobile anchorUnknown nodeMovement trajectory
minus(n + 4)
4R
(n + 4)radic3
4R( )
minus(n + 2)
4R
(n + 2)radic3
4R)(
minusn
4R
nradic3
4R)(
(x0 y0)
Figure 7 Movement trajectory ofMAALRHwith a boundary com-pensation method
Hence
119863(119909 119910)119879=1
2119860minus1119861 (11)
where
A = (119909119886minus 119909119888119910119886minus 119910119888
119909119887minus 119909119888119910119887minus 119910119888
)
B = (1199092
119886minus 1199092
119888+ 1199102
119886minus 1199102
119888+ 1198892
119888minus 1198892
119886
1199092
119887minus 1199092
119888+ 1199102
119887minus 1199102
119888+ 1198892
119888minus 1198892
119887
)
(12)
42 Comparing Algorithms Various path planning schemeshave been proposed for single mobile anchor assisted local-ization We choose HILBERT CIRCLES and S-CURVES tobe compared with our proposed MAALRH
421 HILBERT HILBERT can reduce the collinearity with-out significantly increasing the path length compared withSCAN and DOUBLE-SCAN A level-n HILBERT curvedivides the 119871 times 119871 ROI into 4
119899 square cells and connectsthe centers of those cells using 4119899 line segments [17] Theresolution of the HILBERT curve is defined as the length ofeach line segment Thus 119871 119877 and 119899 satisfy 4119899 = (119871119877) times
(119871119877) Therefore the path length of HILBERT curve can becalculated by using
119871HILBERT = 1198992times 119877 (13)
422 CIRCLES CIRCLES consists of a sequence of concen-tric circles centered within the ROI [18] The resolution is
The Scientific World Journal 7
da
dbdc
Mobile anchorUnknown node
A(xa ya)
B(xb yb) C(xc yc)D(x y)
Figure 8 An example of the trilateration
defined as the diameter of the innermost circle For each outercircle the radius is increased by 119877 sequentially CIRCLEScan reduce collinearity of the anchor points all areas withinthe concentric circles can be localized However CIRCLESleaves four corners of the ROI uncovered The path length ofCIRCLES can be calculated by using
119871CIRCLES =1198992120587119877
4+ (
119899
2minus 1)119877 (14)
423 S-CURVES S-CURVES is based on the SCAN whichprogressively scans the ROI from left to right However S-CURVES takes an ldquo119878rdquo curve instead of moving in a straightline [18] For a 119871 times 119871 ROI and a resolution of 119877 there arelfloor2(119899minus1)3rfloor+1 curve Each vertical ldquo119878rdquo curve consists of 119899minus1semicircle with the radius of 1198772 Therefore the path lengthof S-CURVES can be calculated by using
119871S-CURVES =(119899 minus 1) 120587119877
2(lfloor2 (119899 minus 1)
3rfloor + 1)
+ (119899 minus 2) 119877 +120587119877
2
(15)
5 Performance Evaluation
51 Evaluation Criteria
Localization Ratio Localization ratio is the ratio of the num-ber of localizable unknown nodes to the number of unknownnodes This metric also indicates the coverage degree of themovement trajectory Localization ratio is defined as
119871 ratio =119873119897
119873119900
(16)
Table 1 Parameters used in the simulation
ROI size 480m times 480mCommunication range 60ndash140mResolution 60m 80m and 120mMovement speed 10msNumber of unknown nodes 100ndash500
where119873119897is the number of localizable unknown nodes and119873
119900
is the number of unknown nodes
Localization Accuracy The localization error of unknownnode 119894 is defined as
119890119894=
radic(119906119894minus 119909119894)2+ (V119894minus 119910119894)2+ (119908119894minus 119911119894)2
119903
(17)
where (119906119894 V119894 119908119894) are real coordinates of an unknown node 119894
(119909119894 119910119894 119911119894) are estimated coordinates of an unknown node 119894
and 119903 is the communication range of sensor nodesWe evaluate the localization accuracy by using average
and standard deviation of localization errors of unknownnodes which are defined as
120583119890=1
119873119897
119873119897
sum
119894=1
119890119894
120590119890= radic
1
119873119897
119873119897
sum
119894=1
(119890119894minus 120583119890)2
(18)
where 119873119897is the number of localizable unknown nodes in a
WSN
Path Length To save energy consumption and time forlocalization the path length of the mobile anchor nodeshould be as short as possible
Scalability Scalability means that the localization perfor-mance is independent of the unknown nodes density
52 Experiment Parameters Our simulations are performedusing Matlab Suppose that the ROI is a square Table 1 listsparameters used in simulations Five movement trajecto-ries are compared in this section HILBERT CIRCLES S-CURVES MAALRH and MAALRH BCM (we name theMAALRH with the boundary compensation method asMAALRH BCM) The trilateration is used to calculate coor-dinates of unknown nodes To ensure reliability of evaluationresults 50 simulation runs were performed for each set ofsimulation condition with a different uniform deploymentof unknown nodes on each occasion
53 Simulations and Analysis We evaluate performances offive movement trajectories under three resolutions 60m80m and 120m in terms of localization ratio localizationaccuracy path length and scalability
8 The Scientific World Journal
60 80 100 120 140
Communication range (m)
0
25
50
75
100Lo
caliz
atio
n ra
tio (
)
(a) 119877 = 60
0
25
50
75
100
Loca
lizat
ion
ratio
()
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
0
25
50
75
100
Loca
lizat
ion
ratio
()
(c) 119877 = 120
Figure 9 Localization ratio with different resolutions
531 Localization Ratio Figure 9 depicts the relation be-tween localization ratios and communication ranges underthree resolutions The MAALRH BCM outperforms HIL-BERT CIRCLES and S-CURVES and MAALRH in generalLocalization ratios of MAALRH BCM and HILBERT aresimilar when the communication range is not smaller thanthe resolution Localization ratio of S-CURVES is largerthan that of MAALRH and CIRCLES since MAALRH andCIRCLES leave four corners of ROI uncovered Localizationratio of MAALRH BCM can reach 100 as long as thecommunication range is not smaller than the resolutionsince unknown nodes can receive three noncollinear anchorpoints which can form a regular triangle to estimate theirpositions When the resolution is relatively small that is 119877 =60m localization ratios increase rapidly with the increase ofthe communication range and the localization ratios of the
five algorithms can all reach 100 when the communicationrange is 140m However with the increase of the resolutionthe mobile anchor dose not broadcast anchor packets asfrequently as in the previous case (ie 119877 = 60) onlyMAALRH BCM and HILBERT can reach 100 localizationratio (ie 119877 = 80m and 119877 = 120m) That is becausewith the boundary compensation method MAALRH BCMcan provide noncollinear anchor points to ensure that themovement trajectory can cover the entire ROI When theresolution is much larger than the communication rangeunknown nodes cannot receive enough anchor points toestimate their coordinates which results in zero localizationratios For MAALRH and CIRCLES the movement trajecto-ries leave four corners of the ROI uncovered and unknownnodes on the boundary of the ROI cannot receive at leastthree noncollinear anchor packets from the mobile anchor
The Scientific World Journal 9
60 80 100 120 14000
02
04
06
08120583e
Communication range (m)
(a) 119877 = 60
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
(b) 119877 = 80
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 10 Average deviation with different resolutions
especially when the resolution is large Thus MAALRH andCIRCLES perform worse compared with the other threealgorithms
From the simulation we can conclude that the local-ization ratio depends on the communication range of thesensor nodes and the resolution of the movement trajectorywhich determines the amount and the distance interval of theanchor points
532 Localization Accuracy Figure 10 presents the variationof 120583119890under three resolutions We can observe that with
the increase of the resolution 120583119890increase correspondingly
because distance between two neighboring anchor pointsincreases with the increase of the resolution and results ina larger measurement error MAALRH and MAALRH BCM
almost have the same average deviation since both ofthem use three anchor points which form a regular trian-gle to estimate unknown nodesrsquo coordinates Besides theMAALRH BCM has a boundary comprehension methodto ensure the localization accuracy of all the unknownnodes within a ROI HILBERT and S-CURVES have largeraverage deviations compared with that of MAALRH andMAALRH BCM CIRCLES performs worst among the fivemovement trajectories Because in HILBERT CIRCLESand S-CURVES ordinary nodes randomly select threenoncollinear anchor points to calculate their positions 120583
119890
of MAALRH MAALRH BCM HILBERT and S-CURVESdecrease apparently when the communication range is equalto the resolution (with the variation from 60m to 140m)because more unknown nodes can receive three noncoplanar
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 5
Step 1The ROI is divided into 119899 subrectangles which satisfy 119871 = 119899119877 119899 isin 119873lowast The communication range of the mobileanchor is equal to the resolution that is 119877 = 119903Step 2Themobile anchor traverses the ROI following the regular hexagon movement trajectory (the concretely movementtrajectory is depicted in Figures 5 and 7) while periodically broadcasting anchor packets 119879send (119909119894 119910119894) 119868119863 where 119879senddenotes the sending time (119909
119894 119910119894) stands for its current location and 119868119863 represents the packet 119868119863
Step 3 Unknown nodes receive the anchor packets broadcasted by the mobile anchor and estimate distances to themby using the RSSI techniqueStep 4 Each unknown node decides if any of the three noncoplanar anchor coordinates can almost form a regulartriangle and if it is within the regular triangle If so the unknown node calculates its location by using the trilateration
Algorithm 1 MAALRH algorithm
R
L = nR
Figure 4 An example of network segmentation
The mobile anchor traverses the entire ROI following theregular hexagon trajectory at the speed of V and broadcasts itscurrent location (119909
119894 119910119894)with an interval119879 and a communica-
tion range 119903 as depicted in Figure 5A rectangular coordinate system is constructed with the
origin at (1199090 1199100) At first the mobile anchor moves from
(1199090 1199100) to one of the vertexes of the regular hexagon with
the side length of 119877 for instance the mobile anchor movesfrom (119909
0 1199100) to (minus(12)119877 (radic32)119877)Then themobile anchor
moves along the sides of the first regular hexagon with theside length of 119877 When the mobile anchor arrives at the point(minus(12)119877 (radic32)119877) once again it moves to (minus119877radic3119877) andthen moves along the sides of the second regular hexagonwith the side length of 2119877 The side length of regularhexagons increases by 119877 each time and the mobile anchortraverses the ROI along the sides of 1198992 regular hexagonsThe cycle repeats until the mobile anchor arrives at thepoint (minus(1198994)119877 (119899radic34)119877) twice Thus the total path lengthwithout a boundary compensation method can be calculatedby using
1198711015840
MAALRH =3
41198992119877 +
3
2119899119877 =
3
4
1198712
119877+3
2119871 (8)
Mobile anchorUnknown nodeMovement trajectory
(minusn4R
nradic3
4R)
(x0 y0)
(minusR radic3R)(minusR
2radic3
2R)
Figure 5 Movement trajectory of MAALRH without a boundarycompensation method
Thus for a givenROI the total path length depends on the119877 A smaller 119877 results in a lager path length Since 119877 = V119879with the same movement speed the smaller 119877 is the lessanchor packets are broadcasted By this means the broad-casted anchor points form many regular triangles
413 Boundary Compensation Method Since the regularhexagon movement trajectory leaves four corners of ROIuncovered to improve localization ratio we present a bound-ary compensation method to enhance the MAALRH InBCM mobile anchor travels in the sensing area which islarger than the ROI as shown in Figure 6 Unknown nodesare deployed uniformly in the ROI while mobile anchormoves in the sensing area according to the movementtrajectory Assume that the length of the ROI is 119871 the lengthof the sensing area is 1198711015840 the relation of 119871 and 119871
1015840 can beexpressed as 1198711015840 = 119871 + 119883 119883 isin 119877
+ and 119883 is determined
6 The Scientific World Journal
R
R
Sensing area
ROI
L
X
Unknown nodeMobile anchor Anchor point
L998400
R
Figure 6 The relation of sensing area and ROI
by the movement trajectory and the communication range ofmobile anchor In other words by enlarging movement areaofmobile anchor theROI can be traversed entirelyThereforeunknown nodes which are at the boundary of the ROI can belocalized
We choose 119883 = 2119877 here Thus when the mobile anchorarrives at the point ((minus1198994)119877 (119899radic34)119877) once again after itmoves along the (1198992)th regular hexagon with the side lengthof 3119899119877 the mobile anchor moves to (minus((119899 + 2)4)119877 ((119899 +2)radic34)119877) and moves along the 1198992 + 1th regular hexagonwith the side length of (3119899 + 6)119877 Then the mobile anchormoves to (minus((119899+4)4)119877 ((119899+4)radic34)119877) andmoves along the1198992+2th regular hexagon with the side length of (3119899+12)119877 toensure that unknown nodes at the boundary of the ROI couldfall inside the overlapping communication ranges of at leastthree noncollinear anchors as shown in Figure 7
Thus path length of the MAALRH with a boundarycompensation method can be calculated by using
119871MAALRH =3
41198992119877 +
15
2119899119877 + 18119877 (9)
414 Trilateration An example of the trilateration is shownin Figure 8 Suppose that the unknown node119863(119909 119910) receivesthree anchor packets from the mobile anchor namely119860(119909119886 119910119886) 119861(119909
119887 119910119887) and 119862(119909
119888 119910119888) Distances between 119860 119861
119862 and 119863 are 119889119886 119889119887 and 119889
119888 respectively Since the unknown
node 119863 is within the regular triangle which is composed of119860 119861 and 119862 unknown node 119863 will calculate its location byusing
(119909 minus 119909119886)2+ (119910 minus 119910
119886)2= 1198892
119886
(119909 minus 119909119887)2+ (119910 minus 119910
119887)2= 1198892
119887
(119909 minus 119909119888)2+ (119910 minus 119910
119888)2= 1198892
119888
(10)
Sensing area
ROI
X
Mobile anchorUnknown nodeMovement trajectory
minus(n + 4)
4R
(n + 4)radic3
4R( )
minus(n + 2)
4R
(n + 2)radic3
4R)(
minusn
4R
nradic3
4R)(
(x0 y0)
Figure 7 Movement trajectory ofMAALRHwith a boundary com-pensation method
Hence
119863(119909 119910)119879=1
2119860minus1119861 (11)
where
A = (119909119886minus 119909119888119910119886minus 119910119888
119909119887minus 119909119888119910119887minus 119910119888
)
B = (1199092
119886minus 1199092
119888+ 1199102
119886minus 1199102
119888+ 1198892
119888minus 1198892
119886
1199092
119887minus 1199092
119888+ 1199102
119887minus 1199102
119888+ 1198892
119888minus 1198892
119887
)
(12)
42 Comparing Algorithms Various path planning schemeshave been proposed for single mobile anchor assisted local-ization We choose HILBERT CIRCLES and S-CURVES tobe compared with our proposed MAALRH
421 HILBERT HILBERT can reduce the collinearity with-out significantly increasing the path length compared withSCAN and DOUBLE-SCAN A level-n HILBERT curvedivides the 119871 times 119871 ROI into 4
119899 square cells and connectsthe centers of those cells using 4119899 line segments [17] Theresolution of the HILBERT curve is defined as the length ofeach line segment Thus 119871 119877 and 119899 satisfy 4119899 = (119871119877) times
(119871119877) Therefore the path length of HILBERT curve can becalculated by using
119871HILBERT = 1198992times 119877 (13)
422 CIRCLES CIRCLES consists of a sequence of concen-tric circles centered within the ROI [18] The resolution is
The Scientific World Journal 7
da
dbdc
Mobile anchorUnknown node
A(xa ya)
B(xb yb) C(xc yc)D(x y)
Figure 8 An example of the trilateration
defined as the diameter of the innermost circle For each outercircle the radius is increased by 119877 sequentially CIRCLEScan reduce collinearity of the anchor points all areas withinthe concentric circles can be localized However CIRCLESleaves four corners of the ROI uncovered The path length ofCIRCLES can be calculated by using
119871CIRCLES =1198992120587119877
4+ (
119899
2minus 1)119877 (14)
423 S-CURVES S-CURVES is based on the SCAN whichprogressively scans the ROI from left to right However S-CURVES takes an ldquo119878rdquo curve instead of moving in a straightline [18] For a 119871 times 119871 ROI and a resolution of 119877 there arelfloor2(119899minus1)3rfloor+1 curve Each vertical ldquo119878rdquo curve consists of 119899minus1semicircle with the radius of 1198772 Therefore the path lengthof S-CURVES can be calculated by using
119871S-CURVES =(119899 minus 1) 120587119877
2(lfloor2 (119899 minus 1)
3rfloor + 1)
+ (119899 minus 2) 119877 +120587119877
2
(15)
5 Performance Evaluation
51 Evaluation Criteria
Localization Ratio Localization ratio is the ratio of the num-ber of localizable unknown nodes to the number of unknownnodes This metric also indicates the coverage degree of themovement trajectory Localization ratio is defined as
119871 ratio =119873119897
119873119900
(16)
Table 1 Parameters used in the simulation
ROI size 480m times 480mCommunication range 60ndash140mResolution 60m 80m and 120mMovement speed 10msNumber of unknown nodes 100ndash500
where119873119897is the number of localizable unknown nodes and119873
119900
is the number of unknown nodes
Localization Accuracy The localization error of unknownnode 119894 is defined as
119890119894=
radic(119906119894minus 119909119894)2+ (V119894minus 119910119894)2+ (119908119894minus 119911119894)2
119903
(17)
where (119906119894 V119894 119908119894) are real coordinates of an unknown node 119894
(119909119894 119910119894 119911119894) are estimated coordinates of an unknown node 119894
and 119903 is the communication range of sensor nodesWe evaluate the localization accuracy by using average
and standard deviation of localization errors of unknownnodes which are defined as
120583119890=1
119873119897
119873119897
sum
119894=1
119890119894
120590119890= radic
1
119873119897
119873119897
sum
119894=1
(119890119894minus 120583119890)2
(18)
where 119873119897is the number of localizable unknown nodes in a
WSN
Path Length To save energy consumption and time forlocalization the path length of the mobile anchor nodeshould be as short as possible
Scalability Scalability means that the localization perfor-mance is independent of the unknown nodes density
52 Experiment Parameters Our simulations are performedusing Matlab Suppose that the ROI is a square Table 1 listsparameters used in simulations Five movement trajecto-ries are compared in this section HILBERT CIRCLES S-CURVES MAALRH and MAALRH BCM (we name theMAALRH with the boundary compensation method asMAALRH BCM) The trilateration is used to calculate coor-dinates of unknown nodes To ensure reliability of evaluationresults 50 simulation runs were performed for each set ofsimulation condition with a different uniform deploymentof unknown nodes on each occasion
53 Simulations and Analysis We evaluate performances offive movement trajectories under three resolutions 60m80m and 120m in terms of localization ratio localizationaccuracy path length and scalability
8 The Scientific World Journal
60 80 100 120 140
Communication range (m)
0
25
50
75
100Lo
caliz
atio
n ra
tio (
)
(a) 119877 = 60
0
25
50
75
100
Loca
lizat
ion
ratio
()
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
0
25
50
75
100
Loca
lizat
ion
ratio
()
(c) 119877 = 120
Figure 9 Localization ratio with different resolutions
531 Localization Ratio Figure 9 depicts the relation be-tween localization ratios and communication ranges underthree resolutions The MAALRH BCM outperforms HIL-BERT CIRCLES and S-CURVES and MAALRH in generalLocalization ratios of MAALRH BCM and HILBERT aresimilar when the communication range is not smaller thanthe resolution Localization ratio of S-CURVES is largerthan that of MAALRH and CIRCLES since MAALRH andCIRCLES leave four corners of ROI uncovered Localizationratio of MAALRH BCM can reach 100 as long as thecommunication range is not smaller than the resolutionsince unknown nodes can receive three noncollinear anchorpoints which can form a regular triangle to estimate theirpositions When the resolution is relatively small that is 119877 =60m localization ratios increase rapidly with the increase ofthe communication range and the localization ratios of the
five algorithms can all reach 100 when the communicationrange is 140m However with the increase of the resolutionthe mobile anchor dose not broadcast anchor packets asfrequently as in the previous case (ie 119877 = 60) onlyMAALRH BCM and HILBERT can reach 100 localizationratio (ie 119877 = 80m and 119877 = 120m) That is becausewith the boundary compensation method MAALRH BCMcan provide noncollinear anchor points to ensure that themovement trajectory can cover the entire ROI When theresolution is much larger than the communication rangeunknown nodes cannot receive enough anchor points toestimate their coordinates which results in zero localizationratios For MAALRH and CIRCLES the movement trajecto-ries leave four corners of the ROI uncovered and unknownnodes on the boundary of the ROI cannot receive at leastthree noncollinear anchor packets from the mobile anchor
The Scientific World Journal 9
60 80 100 120 14000
02
04
06
08120583e
Communication range (m)
(a) 119877 = 60
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
(b) 119877 = 80
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 10 Average deviation with different resolutions
especially when the resolution is large Thus MAALRH andCIRCLES perform worse compared with the other threealgorithms
From the simulation we can conclude that the local-ization ratio depends on the communication range of thesensor nodes and the resolution of the movement trajectorywhich determines the amount and the distance interval of theanchor points
532 Localization Accuracy Figure 10 presents the variationof 120583119890under three resolutions We can observe that with
the increase of the resolution 120583119890increase correspondingly
because distance between two neighboring anchor pointsincreases with the increase of the resolution and results ina larger measurement error MAALRH and MAALRH BCM
almost have the same average deviation since both ofthem use three anchor points which form a regular trian-gle to estimate unknown nodesrsquo coordinates Besides theMAALRH BCM has a boundary comprehension methodto ensure the localization accuracy of all the unknownnodes within a ROI HILBERT and S-CURVES have largeraverage deviations compared with that of MAALRH andMAALRH BCM CIRCLES performs worst among the fivemovement trajectories Because in HILBERT CIRCLESand S-CURVES ordinary nodes randomly select threenoncollinear anchor points to calculate their positions 120583
119890
of MAALRH MAALRH BCM HILBERT and S-CURVESdecrease apparently when the communication range is equalto the resolution (with the variation from 60m to 140m)because more unknown nodes can receive three noncoplanar
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 The Scientific World Journal
R
R
Sensing area
ROI
L
X
Unknown nodeMobile anchor Anchor point
L998400
R
Figure 6 The relation of sensing area and ROI
by the movement trajectory and the communication range ofmobile anchor In other words by enlarging movement areaofmobile anchor theROI can be traversed entirelyThereforeunknown nodes which are at the boundary of the ROI can belocalized
We choose 119883 = 2119877 here Thus when the mobile anchorarrives at the point ((minus1198994)119877 (119899radic34)119877) once again after itmoves along the (1198992)th regular hexagon with the side lengthof 3119899119877 the mobile anchor moves to (minus((119899 + 2)4)119877 ((119899 +2)radic34)119877) and moves along the 1198992 + 1th regular hexagonwith the side length of (3119899 + 6)119877 Then the mobile anchormoves to (minus((119899+4)4)119877 ((119899+4)radic34)119877) andmoves along the1198992+2th regular hexagon with the side length of (3119899+12)119877 toensure that unknown nodes at the boundary of the ROI couldfall inside the overlapping communication ranges of at leastthree noncollinear anchors as shown in Figure 7
Thus path length of the MAALRH with a boundarycompensation method can be calculated by using
119871MAALRH =3
41198992119877 +
15
2119899119877 + 18119877 (9)
414 Trilateration An example of the trilateration is shownin Figure 8 Suppose that the unknown node119863(119909 119910) receivesthree anchor packets from the mobile anchor namely119860(119909119886 119910119886) 119861(119909
119887 119910119887) and 119862(119909
119888 119910119888) Distances between 119860 119861
119862 and 119863 are 119889119886 119889119887 and 119889
119888 respectively Since the unknown
node 119863 is within the regular triangle which is composed of119860 119861 and 119862 unknown node 119863 will calculate its location byusing
(119909 minus 119909119886)2+ (119910 minus 119910
119886)2= 1198892
119886
(119909 minus 119909119887)2+ (119910 minus 119910
119887)2= 1198892
119887
(119909 minus 119909119888)2+ (119910 minus 119910
119888)2= 1198892
119888
(10)
Sensing area
ROI
X
Mobile anchorUnknown nodeMovement trajectory
minus(n + 4)
4R
(n + 4)radic3
4R( )
minus(n + 2)
4R
(n + 2)radic3
4R)(
minusn
4R
nradic3
4R)(
(x0 y0)
Figure 7 Movement trajectory ofMAALRHwith a boundary com-pensation method
Hence
119863(119909 119910)119879=1
2119860minus1119861 (11)
where
A = (119909119886minus 119909119888119910119886minus 119910119888
119909119887minus 119909119888119910119887minus 119910119888
)
B = (1199092
119886minus 1199092
119888+ 1199102
119886minus 1199102
119888+ 1198892
119888minus 1198892
119886
1199092
119887minus 1199092
119888+ 1199102
119887minus 1199102
119888+ 1198892
119888minus 1198892
119887
)
(12)
42 Comparing Algorithms Various path planning schemeshave been proposed for single mobile anchor assisted local-ization We choose HILBERT CIRCLES and S-CURVES tobe compared with our proposed MAALRH
421 HILBERT HILBERT can reduce the collinearity with-out significantly increasing the path length compared withSCAN and DOUBLE-SCAN A level-n HILBERT curvedivides the 119871 times 119871 ROI into 4
119899 square cells and connectsthe centers of those cells using 4119899 line segments [17] Theresolution of the HILBERT curve is defined as the length ofeach line segment Thus 119871 119877 and 119899 satisfy 4119899 = (119871119877) times
(119871119877) Therefore the path length of HILBERT curve can becalculated by using
119871HILBERT = 1198992times 119877 (13)
422 CIRCLES CIRCLES consists of a sequence of concen-tric circles centered within the ROI [18] The resolution is
The Scientific World Journal 7
da
dbdc
Mobile anchorUnknown node
A(xa ya)
B(xb yb) C(xc yc)D(x y)
Figure 8 An example of the trilateration
defined as the diameter of the innermost circle For each outercircle the radius is increased by 119877 sequentially CIRCLEScan reduce collinearity of the anchor points all areas withinthe concentric circles can be localized However CIRCLESleaves four corners of the ROI uncovered The path length ofCIRCLES can be calculated by using
119871CIRCLES =1198992120587119877
4+ (
119899
2minus 1)119877 (14)
423 S-CURVES S-CURVES is based on the SCAN whichprogressively scans the ROI from left to right However S-CURVES takes an ldquo119878rdquo curve instead of moving in a straightline [18] For a 119871 times 119871 ROI and a resolution of 119877 there arelfloor2(119899minus1)3rfloor+1 curve Each vertical ldquo119878rdquo curve consists of 119899minus1semicircle with the radius of 1198772 Therefore the path lengthof S-CURVES can be calculated by using
119871S-CURVES =(119899 minus 1) 120587119877
2(lfloor2 (119899 minus 1)
3rfloor + 1)
+ (119899 minus 2) 119877 +120587119877
2
(15)
5 Performance Evaluation
51 Evaluation Criteria
Localization Ratio Localization ratio is the ratio of the num-ber of localizable unknown nodes to the number of unknownnodes This metric also indicates the coverage degree of themovement trajectory Localization ratio is defined as
119871 ratio =119873119897
119873119900
(16)
Table 1 Parameters used in the simulation
ROI size 480m times 480mCommunication range 60ndash140mResolution 60m 80m and 120mMovement speed 10msNumber of unknown nodes 100ndash500
where119873119897is the number of localizable unknown nodes and119873
119900
is the number of unknown nodes
Localization Accuracy The localization error of unknownnode 119894 is defined as
119890119894=
radic(119906119894minus 119909119894)2+ (V119894minus 119910119894)2+ (119908119894minus 119911119894)2
119903
(17)
where (119906119894 V119894 119908119894) are real coordinates of an unknown node 119894
(119909119894 119910119894 119911119894) are estimated coordinates of an unknown node 119894
and 119903 is the communication range of sensor nodesWe evaluate the localization accuracy by using average
and standard deviation of localization errors of unknownnodes which are defined as
120583119890=1
119873119897
119873119897
sum
119894=1
119890119894
120590119890= radic
1
119873119897
119873119897
sum
119894=1
(119890119894minus 120583119890)2
(18)
where 119873119897is the number of localizable unknown nodes in a
WSN
Path Length To save energy consumption and time forlocalization the path length of the mobile anchor nodeshould be as short as possible
Scalability Scalability means that the localization perfor-mance is independent of the unknown nodes density
52 Experiment Parameters Our simulations are performedusing Matlab Suppose that the ROI is a square Table 1 listsparameters used in simulations Five movement trajecto-ries are compared in this section HILBERT CIRCLES S-CURVES MAALRH and MAALRH BCM (we name theMAALRH with the boundary compensation method asMAALRH BCM) The trilateration is used to calculate coor-dinates of unknown nodes To ensure reliability of evaluationresults 50 simulation runs were performed for each set ofsimulation condition with a different uniform deploymentof unknown nodes on each occasion
53 Simulations and Analysis We evaluate performances offive movement trajectories under three resolutions 60m80m and 120m in terms of localization ratio localizationaccuracy path length and scalability
8 The Scientific World Journal
60 80 100 120 140
Communication range (m)
0
25
50
75
100Lo
caliz
atio
n ra
tio (
)
(a) 119877 = 60
0
25
50
75
100
Loca
lizat
ion
ratio
()
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
0
25
50
75
100
Loca
lizat
ion
ratio
()
(c) 119877 = 120
Figure 9 Localization ratio with different resolutions
531 Localization Ratio Figure 9 depicts the relation be-tween localization ratios and communication ranges underthree resolutions The MAALRH BCM outperforms HIL-BERT CIRCLES and S-CURVES and MAALRH in generalLocalization ratios of MAALRH BCM and HILBERT aresimilar when the communication range is not smaller thanthe resolution Localization ratio of S-CURVES is largerthan that of MAALRH and CIRCLES since MAALRH andCIRCLES leave four corners of ROI uncovered Localizationratio of MAALRH BCM can reach 100 as long as thecommunication range is not smaller than the resolutionsince unknown nodes can receive three noncollinear anchorpoints which can form a regular triangle to estimate theirpositions When the resolution is relatively small that is 119877 =60m localization ratios increase rapidly with the increase ofthe communication range and the localization ratios of the
five algorithms can all reach 100 when the communicationrange is 140m However with the increase of the resolutionthe mobile anchor dose not broadcast anchor packets asfrequently as in the previous case (ie 119877 = 60) onlyMAALRH BCM and HILBERT can reach 100 localizationratio (ie 119877 = 80m and 119877 = 120m) That is becausewith the boundary compensation method MAALRH BCMcan provide noncollinear anchor points to ensure that themovement trajectory can cover the entire ROI When theresolution is much larger than the communication rangeunknown nodes cannot receive enough anchor points toestimate their coordinates which results in zero localizationratios For MAALRH and CIRCLES the movement trajecto-ries leave four corners of the ROI uncovered and unknownnodes on the boundary of the ROI cannot receive at leastthree noncollinear anchor packets from the mobile anchor
The Scientific World Journal 9
60 80 100 120 14000
02
04
06
08120583e
Communication range (m)
(a) 119877 = 60
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
(b) 119877 = 80
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 10 Average deviation with different resolutions
especially when the resolution is large Thus MAALRH andCIRCLES perform worse compared with the other threealgorithms
From the simulation we can conclude that the local-ization ratio depends on the communication range of thesensor nodes and the resolution of the movement trajectorywhich determines the amount and the distance interval of theanchor points
532 Localization Accuracy Figure 10 presents the variationof 120583119890under three resolutions We can observe that with
the increase of the resolution 120583119890increase correspondingly
because distance between two neighboring anchor pointsincreases with the increase of the resolution and results ina larger measurement error MAALRH and MAALRH BCM
almost have the same average deviation since both ofthem use three anchor points which form a regular trian-gle to estimate unknown nodesrsquo coordinates Besides theMAALRH BCM has a boundary comprehension methodto ensure the localization accuracy of all the unknownnodes within a ROI HILBERT and S-CURVES have largeraverage deviations compared with that of MAALRH andMAALRH BCM CIRCLES performs worst among the fivemovement trajectories Because in HILBERT CIRCLESand S-CURVES ordinary nodes randomly select threenoncollinear anchor points to calculate their positions 120583
119890
of MAALRH MAALRH BCM HILBERT and S-CURVESdecrease apparently when the communication range is equalto the resolution (with the variation from 60m to 140m)because more unknown nodes can receive three noncoplanar
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 7
da
dbdc
Mobile anchorUnknown node
A(xa ya)
B(xb yb) C(xc yc)D(x y)
Figure 8 An example of the trilateration
defined as the diameter of the innermost circle For each outercircle the radius is increased by 119877 sequentially CIRCLEScan reduce collinearity of the anchor points all areas withinthe concentric circles can be localized However CIRCLESleaves four corners of the ROI uncovered The path length ofCIRCLES can be calculated by using
119871CIRCLES =1198992120587119877
4+ (
119899
2minus 1)119877 (14)
423 S-CURVES S-CURVES is based on the SCAN whichprogressively scans the ROI from left to right However S-CURVES takes an ldquo119878rdquo curve instead of moving in a straightline [18] For a 119871 times 119871 ROI and a resolution of 119877 there arelfloor2(119899minus1)3rfloor+1 curve Each vertical ldquo119878rdquo curve consists of 119899minus1semicircle with the radius of 1198772 Therefore the path lengthof S-CURVES can be calculated by using
119871S-CURVES =(119899 minus 1) 120587119877
2(lfloor2 (119899 minus 1)
3rfloor + 1)
+ (119899 minus 2) 119877 +120587119877
2
(15)
5 Performance Evaluation
51 Evaluation Criteria
Localization Ratio Localization ratio is the ratio of the num-ber of localizable unknown nodes to the number of unknownnodes This metric also indicates the coverage degree of themovement trajectory Localization ratio is defined as
119871 ratio =119873119897
119873119900
(16)
Table 1 Parameters used in the simulation
ROI size 480m times 480mCommunication range 60ndash140mResolution 60m 80m and 120mMovement speed 10msNumber of unknown nodes 100ndash500
where119873119897is the number of localizable unknown nodes and119873
119900
is the number of unknown nodes
Localization Accuracy The localization error of unknownnode 119894 is defined as
119890119894=
radic(119906119894minus 119909119894)2+ (V119894minus 119910119894)2+ (119908119894minus 119911119894)2
119903
(17)
where (119906119894 V119894 119908119894) are real coordinates of an unknown node 119894
(119909119894 119910119894 119911119894) are estimated coordinates of an unknown node 119894
and 119903 is the communication range of sensor nodesWe evaluate the localization accuracy by using average
and standard deviation of localization errors of unknownnodes which are defined as
120583119890=1
119873119897
119873119897
sum
119894=1
119890119894
120590119890= radic
1
119873119897
119873119897
sum
119894=1
(119890119894minus 120583119890)2
(18)
where 119873119897is the number of localizable unknown nodes in a
WSN
Path Length To save energy consumption and time forlocalization the path length of the mobile anchor nodeshould be as short as possible
Scalability Scalability means that the localization perfor-mance is independent of the unknown nodes density
52 Experiment Parameters Our simulations are performedusing Matlab Suppose that the ROI is a square Table 1 listsparameters used in simulations Five movement trajecto-ries are compared in this section HILBERT CIRCLES S-CURVES MAALRH and MAALRH BCM (we name theMAALRH with the boundary compensation method asMAALRH BCM) The trilateration is used to calculate coor-dinates of unknown nodes To ensure reliability of evaluationresults 50 simulation runs were performed for each set ofsimulation condition with a different uniform deploymentof unknown nodes on each occasion
53 Simulations and Analysis We evaluate performances offive movement trajectories under three resolutions 60m80m and 120m in terms of localization ratio localizationaccuracy path length and scalability
8 The Scientific World Journal
60 80 100 120 140
Communication range (m)
0
25
50
75
100Lo
caliz
atio
n ra
tio (
)
(a) 119877 = 60
0
25
50
75
100
Loca
lizat
ion
ratio
()
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
0
25
50
75
100
Loca
lizat
ion
ratio
()
(c) 119877 = 120
Figure 9 Localization ratio with different resolutions
531 Localization Ratio Figure 9 depicts the relation be-tween localization ratios and communication ranges underthree resolutions The MAALRH BCM outperforms HIL-BERT CIRCLES and S-CURVES and MAALRH in generalLocalization ratios of MAALRH BCM and HILBERT aresimilar when the communication range is not smaller thanthe resolution Localization ratio of S-CURVES is largerthan that of MAALRH and CIRCLES since MAALRH andCIRCLES leave four corners of ROI uncovered Localizationratio of MAALRH BCM can reach 100 as long as thecommunication range is not smaller than the resolutionsince unknown nodes can receive three noncollinear anchorpoints which can form a regular triangle to estimate theirpositions When the resolution is relatively small that is 119877 =60m localization ratios increase rapidly with the increase ofthe communication range and the localization ratios of the
five algorithms can all reach 100 when the communicationrange is 140m However with the increase of the resolutionthe mobile anchor dose not broadcast anchor packets asfrequently as in the previous case (ie 119877 = 60) onlyMAALRH BCM and HILBERT can reach 100 localizationratio (ie 119877 = 80m and 119877 = 120m) That is becausewith the boundary compensation method MAALRH BCMcan provide noncollinear anchor points to ensure that themovement trajectory can cover the entire ROI When theresolution is much larger than the communication rangeunknown nodes cannot receive enough anchor points toestimate their coordinates which results in zero localizationratios For MAALRH and CIRCLES the movement trajecto-ries leave four corners of the ROI uncovered and unknownnodes on the boundary of the ROI cannot receive at leastthree noncollinear anchor packets from the mobile anchor
The Scientific World Journal 9
60 80 100 120 14000
02
04
06
08120583e
Communication range (m)
(a) 119877 = 60
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
(b) 119877 = 80
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 10 Average deviation with different resolutions
especially when the resolution is large Thus MAALRH andCIRCLES perform worse compared with the other threealgorithms
From the simulation we can conclude that the local-ization ratio depends on the communication range of thesensor nodes and the resolution of the movement trajectorywhich determines the amount and the distance interval of theanchor points
532 Localization Accuracy Figure 10 presents the variationof 120583119890under three resolutions We can observe that with
the increase of the resolution 120583119890increase correspondingly
because distance between two neighboring anchor pointsincreases with the increase of the resolution and results ina larger measurement error MAALRH and MAALRH BCM
almost have the same average deviation since both ofthem use three anchor points which form a regular trian-gle to estimate unknown nodesrsquo coordinates Besides theMAALRH BCM has a boundary comprehension methodto ensure the localization accuracy of all the unknownnodes within a ROI HILBERT and S-CURVES have largeraverage deviations compared with that of MAALRH andMAALRH BCM CIRCLES performs worst among the fivemovement trajectories Because in HILBERT CIRCLESand S-CURVES ordinary nodes randomly select threenoncollinear anchor points to calculate their positions 120583
119890
of MAALRH MAALRH BCM HILBERT and S-CURVESdecrease apparently when the communication range is equalto the resolution (with the variation from 60m to 140m)because more unknown nodes can receive three noncoplanar
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 The Scientific World Journal
60 80 100 120 140
Communication range (m)
0
25
50
75
100Lo
caliz
atio
n ra
tio (
)
(a) 119877 = 60
0
25
50
75
100
Loca
lizat
ion
ratio
()
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
0
25
50
75
100
Loca
lizat
ion
ratio
()
(c) 119877 = 120
Figure 9 Localization ratio with different resolutions
531 Localization Ratio Figure 9 depicts the relation be-tween localization ratios and communication ranges underthree resolutions The MAALRH BCM outperforms HIL-BERT CIRCLES and S-CURVES and MAALRH in generalLocalization ratios of MAALRH BCM and HILBERT aresimilar when the communication range is not smaller thanthe resolution Localization ratio of S-CURVES is largerthan that of MAALRH and CIRCLES since MAALRH andCIRCLES leave four corners of ROI uncovered Localizationratio of MAALRH BCM can reach 100 as long as thecommunication range is not smaller than the resolutionsince unknown nodes can receive three noncollinear anchorpoints which can form a regular triangle to estimate theirpositions When the resolution is relatively small that is 119877 =60m localization ratios increase rapidly with the increase ofthe communication range and the localization ratios of the
five algorithms can all reach 100 when the communicationrange is 140m However with the increase of the resolutionthe mobile anchor dose not broadcast anchor packets asfrequently as in the previous case (ie 119877 = 60) onlyMAALRH BCM and HILBERT can reach 100 localizationratio (ie 119877 = 80m and 119877 = 120m) That is becausewith the boundary compensation method MAALRH BCMcan provide noncollinear anchor points to ensure that themovement trajectory can cover the entire ROI When theresolution is much larger than the communication rangeunknown nodes cannot receive enough anchor points toestimate their coordinates which results in zero localizationratios For MAALRH and CIRCLES the movement trajecto-ries leave four corners of the ROI uncovered and unknownnodes on the boundary of the ROI cannot receive at leastthree noncollinear anchor packets from the mobile anchor
The Scientific World Journal 9
60 80 100 120 14000
02
04
06
08120583e
Communication range (m)
(a) 119877 = 60
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
(b) 119877 = 80
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 10 Average deviation with different resolutions
especially when the resolution is large Thus MAALRH andCIRCLES perform worse compared with the other threealgorithms
From the simulation we can conclude that the local-ization ratio depends on the communication range of thesensor nodes and the resolution of the movement trajectorywhich determines the amount and the distance interval of theanchor points
532 Localization Accuracy Figure 10 presents the variationof 120583119890under three resolutions We can observe that with
the increase of the resolution 120583119890increase correspondingly
because distance between two neighboring anchor pointsincreases with the increase of the resolution and results ina larger measurement error MAALRH and MAALRH BCM
almost have the same average deviation since both ofthem use three anchor points which form a regular trian-gle to estimate unknown nodesrsquo coordinates Besides theMAALRH BCM has a boundary comprehension methodto ensure the localization accuracy of all the unknownnodes within a ROI HILBERT and S-CURVES have largeraverage deviations compared with that of MAALRH andMAALRH BCM CIRCLES performs worst among the fivemovement trajectories Because in HILBERT CIRCLESand S-CURVES ordinary nodes randomly select threenoncollinear anchor points to calculate their positions 120583
119890
of MAALRH MAALRH BCM HILBERT and S-CURVESdecrease apparently when the communication range is equalto the resolution (with the variation from 60m to 140m)because more unknown nodes can receive three noncoplanar
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 9
60 80 100 120 14000
02
04
06
08120583e
Communication range (m)
(a) 119877 = 60
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
(b) 119877 = 80
60 80 100 120 14000
02
04
06
08
120583e
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 10 Average deviation with different resolutions
especially when the resolution is large Thus MAALRH andCIRCLES perform worse compared with the other threealgorithms
From the simulation we can conclude that the local-ization ratio depends on the communication range of thesensor nodes and the resolution of the movement trajectorywhich determines the amount and the distance interval of theanchor points
532 Localization Accuracy Figure 10 presents the variationof 120583119890under three resolutions We can observe that with
the increase of the resolution 120583119890increase correspondingly
because distance between two neighboring anchor pointsincreases with the increase of the resolution and results ina larger measurement error MAALRH and MAALRH BCM
almost have the same average deviation since both ofthem use three anchor points which form a regular trian-gle to estimate unknown nodesrsquo coordinates Besides theMAALRH BCM has a boundary comprehension methodto ensure the localization accuracy of all the unknownnodes within a ROI HILBERT and S-CURVES have largeraverage deviations compared with that of MAALRH andMAALRH BCM CIRCLES performs worst among the fivemovement trajectories Because in HILBERT CIRCLESand S-CURVES ordinary nodes randomly select threenoncollinear anchor points to calculate their positions 120583
119890
of MAALRH MAALRH BCM HILBERT and S-CURVESdecrease apparently when the communication range is equalto the resolution (with the variation from 60m to 140m)because more unknown nodes can receive three noncoplanar
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
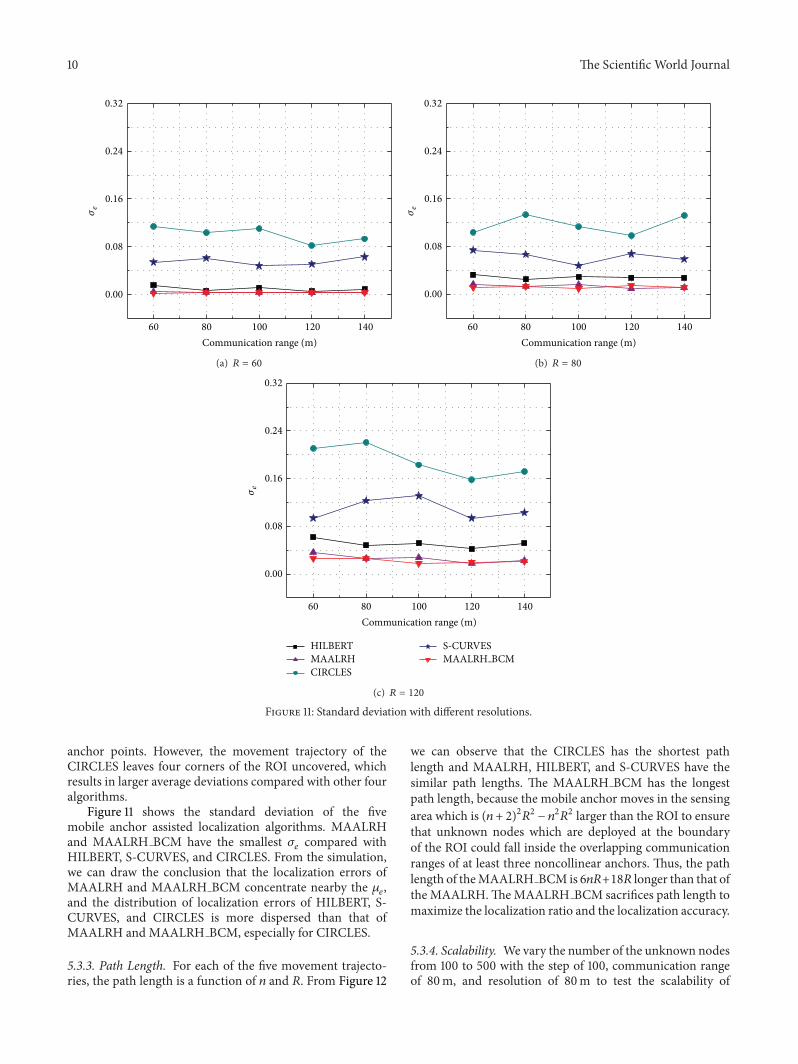
10 The Scientific World Journal
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(a) 119877 = 60
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
(b) 119877 = 80
032
024
016
008
000
120590e
60 80 100 120 140
Communication range (m)
HILBERTMAALRHCIRCLES
S-CURVESMAALRH BCM
(c) 119877 = 120
Figure 11 Standard deviation with different resolutions
anchor points However the movement trajectory of theCIRCLES leaves four corners of the ROI uncovered whichresults in larger average deviations compared with other fouralgorithms
Figure 11 shows the standard deviation of the fivemobile anchor assisted localization algorithms MAALRHand MAALRH BCM have the smallest 120590
119890compared with
HILBERT S-CURVES and CIRCLES From the simulationwe can draw the conclusion that the localization errors ofMAALRH and MAALRH BCM concentrate nearby the 120583
119890
and the distribution of localization errors of HILBERT S-CURVES and CIRCLES is more dispersed than that ofMAALRH and MAALRH BCM especially for CIRCLES
533 Path Length For each of the five movement trajecto-ries the path length is a function of 119899 and 119877 From Figure 12
we can observe that the CIRCLES has the shortest pathlength and MAALRH HILBERT and S-CURVES have thesimilar path lengths The MAALRH BCM has the longestpath length because the mobile anchor moves in the sensingarea which is (119899 + 2)21198772 minus 11989921198772 larger than the ROI to ensurethat unknown nodes which are deployed at the boundaryof the ROI could fall inside the overlapping communicationranges of at least three noncollinear anchors Thus the pathlength of theMAALRH BCM is 6119899119877+18119877 longer than that ofthe MAALRHTheMAALRH BCM sacrifices path length tomaximize the localization ratio and the localization accuracy
534 Scalability We vary the number of the unknown nodesfrom 100 to 500 with the step of 100 communication rangeof 80m and resolution of 80m to test the scalability of
The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 11
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(a) 119877 = 60
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
(b) 119877 = 80
8000
7000
6000
5000
4000
3000
2000
1000
0
Path
leng
th (m
)
HILBERT MAALRHCIRCLESS-CURVES
MAALRH BCM
(c) 119877 = 120
Figure 12 Path length with different resolutions
the MAALRH BCM Table 2 shows the relation betweenthe localization ratio 120583
119890 120590119890 and the number of unknown
nodes As depicted in Table 2 the localization ratio remains100 with the increase of the number of unknown nodessince the communication range is equal to the resolutionunknown nodes can receive three noncollinear anchor pointswhich can form a regular triangle to estimate their positions120583119890and 120590
119890change litter under different unknown node
densities where the maximum 120583119890is 00214m larger than the
minimum 120583119890and the maximum 120590
119890is 00071m larger than
the minimum 120590119890 This result proves that the localization ratio
and localization accuracy of MAALRH BCM do not dependon the unknown node density they depend on the sensornodersquos communication range and mobile anchorrsquos trajectoryresolution which determine the amount and the distanceinterval of anchor points
Table 2 Scalability of MAALRH BCM
100 200 300 400 500119871 ratio 100 100 100 100 100120583119890
01324 01538 01454 01459 01397120590119890
00237 00264 00193 00240 00204
6 Conclusion
In this paper we propose a mobile anchor assisted localiza-tion algorithm based on regular hexagon in two-dimensionalWSNs which can cover a square ROI entirely with a bound-ary compensation method Simulations indicate that com-pared with HILBERT CIRCLES and S-CURVES algorithmstheMAALRH BCMcan achieve higher localization ratio and
12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 The Scientific World Journal
localization accuracy when the communication range is notsmaller than the resolution In summary a carefully designedmovement trajectory can significantly improve localizationperformances
The future research issues in the area of mobile anchorassisted localization possibly are as follows
(i) In real applications obstacle-resistant mobile anchorassisted localization algorithms are needed to dealwith the obstacles in a given ROI Movement trajec-tories of mobile anchors should be designed dynami-cally or partially according to the observable environ-ment or deployment situations to make full use of thereal-time information during localization
(ii) Single mobile anchor assisted localization algorithmtakes a long time to locate all the unknown nodes ina ROI especially for a large-scale WSN Thus col-laborative mobile anchor assisted localization algo-rithm which uses several mobile anchors should bespecifically designed to reduce localization time andimprove localization accuracy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work is supported by the Natural Science Foundationof Jiangsu Province of China no BK20131137 the AppliedBasic Research Program of Nantong Science and Tech-nology Bureau no BK2013032 and the Guangdong Uni-versity of Petrochemical Technologyrsquos Internal Project no2012RC0106 Jaime Lloretrsquos work has been partially supportedby the ldquoMinisterio de Ciencia e Innovacionrdquo through theldquoPlan Nacional de I+D+i 2008ndash2011rdquo in the ldquoSubprograma deProyectos de Investigacion Fundamentalrdquo Project TEC2011-27516 Joel J P C Rodriguesrsquos work has been supported byldquoInstituto de Telecomunicacoesrdquo Next Generation Networksand Applications Group (NetGNA) Covilha Delegation bynational funding from the Fundacao para a Ciencia e aTecnologia (FCT) through the Pest-OEEEILA00082013Project
References
[1] Y Liu Z Yang X Wang and L Jian ldquoLocation localizationand localizabilityrdquo Journal of Computer Science and Technologyvol 25 no 2 pp 274ndash297 2010
[2] H Akcan V Kriakov H Bronnimann andA Delis ldquoManagingcohort movement of mobile sensors via GPS-free and compass-free node localizationrdquo Journal of Parallel and DistributedComputing vol 70 no 7 pp 743ndash757 2010
[3] I F AkyildizW Su Y Sankarasubramaniam and E Cayirci ldquoAsurvey on sensor networksrdquo IEEE Communications Magazinevol 40 no 8 pp 102ndash114 2002
[4] L Gui T Val and A Wei ldquoA novel two-class localizationalgorithm inwireless sensor networksrdquo Network Protocols andAlgorithms vol 3 no 3 pp 1ndash16 2011
[5] N V Doohan S Tokekar and JitendraPati ldquoMobility of sinkusing hexagon architecture in highly data centric wirelesssensor networksrdquo International Journal of ScienticampEngineeringResearch vol 3 no 9 pp 528ndash540 2012
[6] S Vupputuri K K Rachuri and C Siva Ram Murthy ldquoUsingmobile data collectors to improve network lifetime of wirelesssensor networks with reliability constraintsrdquo Journal of Paralleland Distributed Computing vol 70 no 7 pp 767ndash778 2010
[7] Y Zeng J Cao J Hong S Zhang and L Xie ldquoSecure local-ization and location verification in wireless sensor networks asurveyrdquo Journal of Supercomputing vol 64 no 3 pp 685ndash7012013
[8] G Han H Xu T Q Duong J Jiang and T Hara ldquoLocalizationalgorithms of wireless sensor networks a surveyrdquo Telecommu-nication Systems vol 52 no 4 pp 2419ndash2436 2013
[9] A Al-Fuqaha ldquoA precise indoor localization approach basedon particle filter and dynamic exclusion techniquesrdquo NetworkProtocols and Algorithms vol 5 no 2 pp 50ndash71 2013
[10] V K Chaurasiya N Jain and G C Nandi ldquoA novel distanceestimation approach for 3D localization in wireless sensornetwork using multi dimensional scalingrdquo Information Fusionvol 15 pp 5ndash18 2014
[11] O Diallo J J P C Rodrigues and M Sene ldquoReal-time datamanagement on wireless sensor networks a surveyrdquo Journal ofNetwork andComputer Applications vol 35 no 3 pp 1013ndash10212012
[12] I Amundson and X D Koutsoukos ldquoA survey on localizationfor mobile wireless sensor networksrdquo inMobile Entity Localiza-tion andTracking inGPS-less Environnments vol 5801 ofLectureNotes in Computer Science pp 235ndash254 2009
[13] Y Ding C Wang and L Xiao ldquoUsing mobile beacons to locatesensors in obstructed environmentsrdquo Journal of Parallel andDistributed Computing vol 70 no 6 pp 644ndash656 2010
[14] H Chenji and R Stoleru ldquoMobile sensor network localizationin harsh environmentsrdquo in Distributed Computing in SensorSystems vol 6131 of Lecture Notes in Computer Science pp 244ndash257 Springer Berlin Germany 2010
[15] AN Campos E L Souza F GNakamura E F Nakamura andJ J P C Rodrigues ldquoOn the impact of localization and densitycontrol algorithms in target tracking applications for wirelesssensor networksrdquo Sensors Journal vol 12 no 6 pp 6930ndash69522012
[16] C Ou andW He ldquoPath planning algorithm for mobile anchor-based localization in wireless sensor networksrdquo IEEE SensorsJournal vol 13 no 2 pp 466ndash475 2013
[17] D Koutsonikolas S M Das and Y C Hu ldquoPath planning ofmobile landmarks for localization in wireless sensor networksrdquoComputer Communications vol 30 no 13 pp 2577ndash2592 2007
[18] R Huang and G V Zaruba ldquoStatic path planning for mobilebeacons to localize sensor networksrdquo in Proceedings of the 5thAnnual IEEE International Conference on Pervasive Computingand Communications Workshops (PerCom Workshops 07) pp323ndash328 White Plains NY USA March 2007
[19] ZHuDGu Z Song andH Li ldquoLocalization inwireless sensornetworks using a mobile anchor noderdquo in Proceedings of theIEEEASME International Conference on Advanced IntelligentMechatronics (AIM rsquo08) pp 602ndash607 Xian China July 2008
The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 13
[20] B Zhang F Yu and Z Zhang ldquoCollaborative localization algo-rithm for wireless sensor networks using mobile anchorsrdquo inProceeding of the 2nd Asia-Pacific Conference on ComputationalIntelligence and Industrial Applications (PACIIA 09) vol 1 pp309ndash312 Wuhan China November 2009
[21] H Cui Y Wang and J Lv ldquoPath planning of mobile anchorin three-dimensional wireless sensor networks for localizationrdquoJournal of Information and Computational Science vol 9 no 8pp 2203ndash2210 2012
[22] H Cui and Y Wang ldquoFour-mobile-beacon assisted localizationin three-dimensional wireless sensor networksrdquo Computers andElectrical Engineering vol 38 no 3 pp 652ndash661 2012
[23] H Li J Wang X Li and H Ma ldquoReal-time path planningof mobile anchor node in localization for wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Information andAutomation (ICIA rsquo08) pp 384ndash389 Chang-sha China June 2008
[24] Q Fu W Chen K Liu and X Wang ldquoStudy on mobile beacontrajectory for node localization in wireless sensor networksrdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo10) pp 1577ndash1581 Harbin China June2010
[25] K Kim B Jung W Lee and D Du ldquoAdaptive path planningfor randomly deployed wireless sensor networksrdquo Journal ofInformation Science andEngineering vol 27 no 3 pp 1091ndash11062011
[26] S Li D Lowe X Kong and R Braun ldquoWireless sensornetwork localization algorithm using dynamic path of mobilebeaconrdquo in Proceedings of the 17th Asia Pacific Conference onCommunications (APCC rsquo11) pp 344ndash349 Sabah MalaysiaOctober 2011
[27] K Ssu C Ou and H C Jiau ldquoLocalization with mobileanchor points in wireless sensor networksrdquo IEEE Transactionson Vehicular Technology vol 54 no 3 pp 1187ndash1197 2005
[28] Z Guo Y Guo F Hong et al ldquoPerpendicular intersectionlocating wireless sensors with mobile beaconrdquo IEEE Transac-tions on Vehicular Technology vol 59 no 7 pp 3501ndash3509 2010
[29] E Guerrero H G Xiong Q Gao G Cova R Ricardo and JEstevez ldquoADAL a distributed range-free localization algorithmbased on a mobile beacon for wireless sensor networksrdquo inProceedings of the International Conference on Ultra ModernTelecommunications and Workshops pp 1ndash7 Saint PetersburgRussia October 2009
[30] B Xiao H Chen and S Zhou ldquoDistributed localization using amoving beacon in wireless sensor networksrdquo IEEE Transactionson Parallel and Distributed Systems vol 19 no 5 pp 587ndash6002008
[31] S Lee E Kim C Kim and K Kim ldquoLocalization with a mobilebeacon based on geometric constraints in wireless sensornetworksrdquo IEEE Transactions on Wireless Communications vol8 no 12 pp 5801ndash5805 2009
[32] G Han D Choi and W Lim ldquoReference node placement andselection algorithm based on trilateration for indoor sensornetworksrdquo Wireless Communications and Mobile Computingvol 9 no 8 pp 1017ndash1027 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of




























