Embed Size (px)
Citation preview

Geophysical Prospecting 30, 501-514, 1982.
OPTIMIZATION OF SHORT DIGITAL LINEAR FILTERS FOR INCREASED ACCURACY*
D. GUPTASARMA**
ABSTRACT GUPTASARMA, D. 1982, Optimization of Short Digital Linear Filters for Increased Accuracy, Geophysical Prospecting 30, 501-514.
The accuracy of short length digital linear filter operators can be substantially increased if the sampling interval as well as the abscissa shift are properly adjusted. This may be done by a trial and error process of adjustment of these parameters until the error made by the filter operator, applied to a suitably chosen test function, is smallest.
As an illustration of the application of this method, 7-, 11- and 19-point filters for the calculation of Schlumberger apparent resistivity from a known resistivity transform are designed, Errors with the new 7-point filter are seen to be less than those with a 19-point filter of conventional design. The errors with the new 19-point filter are two to three orders of magnitude smaller than those made by the conventional 19-point filter.
The new method should provide digital linear operators that allow significant improvements in accuracy for comparable computation efforts, or substantial reduction in computation for comparable accuracy of results, or something of both.
INTRODUCTION Digital linear filter operators have been in widespread use in geophysics for about a decade in evaluating linear transformations that occur in the forward solution of electrical resistivity and EM induction problems. The method was first introduced by Ghosh (1971) and has been used and improved by Koefoed (1972, 1976, 1979), Koefoed and Dirks (1979), Das and Ghosh (1974), Das, Ghosh and Biewinga (1974), Kumar and Das (1977), Anderson (1975) and several others. Johansen and SBrensen (1979) have analyzed the accuracy of the filters for Hankel and Fourier transforms.
The object of these studies was to estimate numerically the value of the output f ( s ) obtained by a linear transformation of an input function F(1) where the two functions are related via a Kernel function K by an equation of the form
f(s) = l m F ( I ) K ( I s ) d l
* Received July 1981, revision December 1981. ** National Geophysical Research Institute, Hyderabad 500 007, India.
0016-8025/82/0800-0501 $02.00 @ 1982 EAEG 50 1

502 D. GUPTASARMA
when the transformation is from the 2-domain into the s-domain, or by an equation of the form
f ( s ) = ]:mF(s - A)K(A) dA
when bothfand F are in the s-domain. Equation (2) is in convolutional form and equation (1) can be changed into convolutional form by a change of variables.
If the two functions being convolved are band-limited, that is, if their Fourier transforms have vanishing magnitudes for all angular frequencies greater than a certain angular frequency oo , then the infinite integral in (2) can be written exactly as an infinite sum of products of equally spaced samples of the input function F and the given Kernel function K with a sampling interval T = n//w,. If the Kernel function tends to vanish at both ends of the abscissa, the summation can be finite, the accuracy of the result increasing with increasing number of terms added.
Even if the functions under convolution are not truly band-limited, an approximation of the integral is still obtainable provided the sampling interval T is short enough to make n/T reach a value beyond which the energy contents of the functions are negligible. The error is thus expected to increase with increasing sampling interval and decreasing number of terms. The work of Johansen and Smensen ,( 1979) provides a method of determining the largest errors to be expected for a given sampling interval.
A filter operator for a given Kernel is thus defined by the finite set of N filter coefficients br, their spacing T , and the shift a, of the input sampling points. One performs the summation
N f ( s ) N 1 F(s - a, + rT - T ) . 4,
r = 1
in order to approximate the convolution integral in equation (2). The power and elegance of this method for evaluating a wide variety of
transformations lies in the fact that one can use a remarkably small number of filter coefficients for a reasonable accuracy, resulting in an enormous saving of computation time when compared to other conventional numerical methods of integration.
This saving in computation time is associated with a reduction in accuracy. The accuracy of a filter for a given class of input functions with a given number of elements N depends on the method used for determining T , a, , and the coefficients
In this paper we seek a method of optimally adjusting these parameters in order br .
to minimize the error made by a discrete digital operator with a small specified N .
DEFINITION OF T H E ERROR
For a given transformation, a digital filter operator with a finite number of elements results in an error that depends on the input function and changes with the

DIGITAL FILTERS FOR GEOELECTRIC DATA 503
independent variable. The error can be positive as well as negative, with large excursions. Let the relative error be defined as the ratio
(theoretical value - filtered value)/(theoretical value)
and let E be the magnitude of the largest relative error produced by a given filter when applied to a properly chosen test input function. It is then possible to use the value of E for comparing the performance of different filters.
One is tempted to consider a single-step function as the test input function because this represents an extreme case of wideband input. However, for filters that are asymmetric, one must consider the combination of a positive and a negative step in order to determine errors in ascending as well as descending branches of the input function.
However, no short filter would produce acceptable errors for such an input function. Therefore, it seems proper to take a test input function that has asymptotic constant values at the extreme ends of the abscissa, and a single, smooth, preferably symmetrical trough, or a peak, with rather steep slopes on both sides. The test input function and its transform must be known in easily computed closed form.
STATEMENT O F T H E OPTIMIZATION PROBLEM
For a given linear transformation and a suitably chosen test function a filter user may ask one of the two following questions:
(1) With the number N of elements in the digital filter preassigned, what is a filter that will produce the smallest error E as defined above?
(2) What is the smallest N that results in errors smaller than a given largest magnitude?
The answer to question (2) is contained in the answer to question (l), if worked out for different values of N . In this paper we seek an answer to question (1).
Let the set of N filter coefficients be 4r , r = 1 to N . Let the test input function be F(s) and its transformf(s). The filtered valuefl(s) for an abscissa s is
N fl(s) = 1 F(s - a. + rT - T ) +,..
r = 1
We seek to minimize the largest value of the magnitude of
over all s, by adjusting the filter parameters T , a , , and the set of 4r. It seems to be very difficult to solve the above optimization problem analytically.
We take recourse therefore to a numerical approach. For a given N and for given trial values of a , and T, a set of 6, can be generated
immediately using the Wiener-Hopf minimization proposed by Koefoed and Dirks (1979) with a known transform pair of input and output functions which we shall call the “design pair”. This filter can then be applied to the test function at a sufficient number of closely spaced points to determine the error E .

504 D. GUPTASARMA
If we think of this error E plotted as heights above an a,-T-plane for different values of a, and T, we have a surface of which the lowest point represents the solution we are seeking.
THE OPTIMIZATION STRATEGY The E-surface, unfortunately, is usually highly complex. It is seen to be piecewise continuous with very large discontinuities in slope. Moreover, the error surface is somewhat dependent on the choice of the number and spacing of the abscissa points taken for the Wiener-Hopf minimization.
Due to the complexity of the E-surface it is difficult to develop a strategy that is fast as well as automatic, and works in all cases. A certain amount of trial and error is needed to localize the search area in the a,-T-plane.
It was found that the design function pair can be either the same as the test function pair or a different function pair, with somewhat different results.
After much experimentation, the following basic procedure appeared to work : Step I : Choose a known convenient transform pair for design and, if desired, a
different known transform pair for testing. Step 2 : Select an appropriate number of equally spaced fitting points on the
input axis of the design function for Wiener-Hopf minimization, and a set of closely equispaced test points over the input axis of the test function. The set of fitting points as well as the set of test points should adequately cover the variable part of the corresponding output functions.
S t e p 3 : Select a square grid array of trial points on the a,-T-plane and calculate E for each grid point.
S t e p 4 : Examine the values of I? and reduce the search area to a region around the lowest fi with a smaller grid. Determine J? for the points of the smaller grid.
S t e p 5 : If the smaller grid spacing is not fine enough, go back to step 4. Step 6: Take the values of a, and T for the lowest E along with the filter
coefficients generated by the Wiener-Hopf minimization with these values. The end elements of the set of filter coefficients may be adjusted to make the sum of all elements equal to the required constant if desired.
The above procedure is straightforward and has been programmed on a Hewlett-Packard HP9845 desktop calculator. However, the procedure as stated in steps 1-6 above converges rather slowly. In order to make it faster, we have used an algorithm that combines steps 4 and 5 and allows the grid spacing to be reduced while searching along a line of grid points to locate the lowest E along that line. By repeating this procedure on the neighbouring line of grid points, the trace of lowest E points in that region of the a,-T-plane is found approximately. The search then goes to a finer grid over that part of the trace of lowest E which contains the lower value of E. Such a procedure reduces the total labor substantially.
Other algorithms are possible ; we found, however, that algorithms based on the numerical determination of partial derivatives of E with respect to a, and T tend to stick up in local “lows” of E which happen to be nearest to the starting a, and T values. The same was found to be true of algorithms based on the determination of

DIGITAL FILTERS FOR GEOELECTRIC DATA 505
E at three noncolinear points in the a,-T-plane, finding a fourth point in the neighbourhood where is lower than the highest value among the first three, and iterating the procedure by rejecting the point with highest E. Such algorithms fail because the E-surface has a large number of intersecting “pieces” that are convex upward. If, however, the search has been localized around a particular “low”, any fast algorithm may be used to converge to that low.
One consequence of the discrete jump trials made in the proposed method is that the final results are somewhat different for different initial guesses and grid sizes. For all functions tried so far it was found that there are a number of solutions with rather different a,, T and filter coefficients which perform more or less similarly as far as the error is concerned. Koefoed and Dirks (1979) noticed a similar effect even with specified sampling interval, and postulated the existence of zero-output filters.
The error surface has a number of narrow, deep “grooves” in the region in which the error is generally low. It is easy to miss the bottom of the deepest of these grooves by any discrete-jump search procedure.
We have not succeeded as yet in arriving at a search algorithm that is entirely satisfactory and works in all cases. Nevertheless, some very good short filters can be found quickly by the above method. In all transformations examined by us we have found the accuracy for a given number of elements to be superior to the accuracy of a filter with the same number of elements designed by the frequency domain approach. We believe that it should turn out to be so for other transformations too.
RESULTS OBTAINED W I T H THE NEW METHOD We illustrate the above procedure with a widely used transformation in electrical prospecting, viz. a filter to convert resistivity transform function into Schlumberger apparent resistivity.
The resistivity transform T(A) for a horizontally layered earth is a function of a parameter A and the resistivities and thicknesses of the various layers which, for a given forward problem, are regarded as constants. The apparent resistivity pa observed over such a ground with any array, as a function of the array size parameter s, can be shown to be a linear transformation of T(A). An excellent exposition of the methods of computing T(1) from known parameters and the method of calculating pa therefrom through the use of a digital linear filter can be found in the monograph by Koefoed (1979).
We designed a number of filters of short length for the particular transformation that would produce the Schlumberger apparent resistivity. The details of the function used for the design as well as for testing are given in the appendix. The filter coefficients and abscissa values, as well as the method of applying the filters, are also shown there.
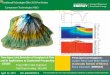
Figure 1 is a plot of errors produced by the new 11-point filter. In this plot the abscissa is the logarithm of the array spacing and the ordinate is the common logarithm of the absolute value of the relative error. The relative error is defined as the ratio (theoretical value - filtered value)/(theoretical value) of the calculated

506
I o4 I o2
D. GUPTASARMA
10’ - s
t l o Relotive error
Fig. 1. Plots of relative error in Schlumberger apparent resistivity produced by the new 11-point filter (- ) and a conventional 19-point filter (- - - -) for different values of s. Input function is Tl(A) (see appendix) with A = 1, p1 = 1 and pz = 0.01.
Schlumberger apparent resistivity. The input function is a descending type two-layer resistivity transform Tl(A), given in the appendix. Also plotted in the same figure are the corresponding errors produced by a 19-point filter designed by the frequency domain method (taken from Koefoed and Dirks 1979). It can be seen that the largest error produced by the new 11-point filter is at least an order of magnitude smaller than the largest error of the 19-point filter.
Since the relative error can be positive as well as negative it crosses zero at a number of points along the abscissa. These zero crossings cannot be shown properly on a logarithmic plot of the absolute value and are to be understood as sharp downward extensions at the negative peaks appearing on the plots in fig. 1 as well as the other figures.
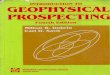
This spectacular improvement in accuracy, despite nearly 50% reduction in the number of filter elements, is seen to persist for all test functions synthesized from the known transform pairs that have been tried. While fig. 1 is the result of applying the 1 1-point filter on a descending type input function, fig. 2 is a plot of the errors made by the new 1 1-point filter on an ascending type two-layer input function. Figure 3 is a plot of the errors made by the new 7-point filter for the same ascending two-layer input function as in fig. 2 along with corresponding errors made by the 9-point and 19-point filter made by the frequency domain approach (Ghosh, taken from Koefoed 1979, Koefoed and Dirks 1979). Trials with “bowl” as well as “bell” type inputs and multilayer cases show similar improvement in accuracy. The improvement in the error is obvious.

D I G I T A L FILTERS F O R GEOELECTRIC DATA
1 6 ~ i o 2 I
104 IC2 c i
Ascending type
Input = T21h) B = I , G = O O l , 4=l
- - Io Relat ive error
10' - s 16 I
, --. / '\
/A
t 10 '
Relat ive error
i o2 I o4
- s
- 2 10
- 4 , \
10 \ \
Fig. 2. Same as fig. 1 with input function T2(,l), E = 1, p3 = 0.01, p4 = 1.
T t
507
Fig. 3. Errors with new 7-point (- ) and conventional 9-point (- - - -) and 19-point (- - - -) filters. Input function is T2(,l) with E = 1, p3 = 0.01 and p4 = 1. (9-point filter from Koefoed 1979 and 19-point filter from Koefoed and Dirks 1979.)

508 D. GUPTASARMA
104 102 I
No of places retained
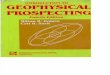
The coefficients of most resistivity filters designed by earlier workers have been truncated, retaining four digits after the decimal. With such truncation one cannot expect much accuracy even with a large number of closely spaced samples. With the new filters for the transformation under illustration we have examined the effect of rounding of filter coefficients. While the 7-point filter can be rounded to four decimal places without significant loss in accuracy, the 11-point filter should have at least five decimal places and the longer filters should have more accurate coefficients for best results.
If the inputs are to be derived from actual observations instead of an algebraic expression, our preference is for the use of a least-squares fit with a properly chosen function for interpolation of values at the points required by the filter, as against the use of manual smoothing for doing so. There is hardly any case for the use of a large number of filter coefficients of inadequate accuracy.
Figure 4 shows the effect of rounding of filter coefficients for a 19-point filter for the same transformation as in the earlier illustration. The input function used is the same as the one in fig. 2.
- - I o Relotive error
1 ~ 2 - s 104 I
T t
The transformation of a function T(A) that is a constant for all A should produce the same constant value as the apparent Schlumberger resistivity. For a finite length digital filter, this requires that the filter elements should add up to unity. The Wiener-Hopf minimization process used in the above procedure for generating each

DIGITAL FILTERS FOR GEOELECTRIC DATA 509
trial filter does not ensure this. In all the above examples we have adjusted the first element (most negative abscissa), after rounding, to make the sum of the coefficients equal to unity. This end adjustment does not have much effect on the performance of the filter if enough digits after the decimal place have been retained.
DISCUSSION AND C O N C L U S I O N S
The procedure for optimization of short digital filters described and illustrated above involves more computation than earlier methods of the frequency domain approach. However, the procedure can be carried out on small desktop systems and, because it is based on the Wiener-Hopf minimization method proposed by Koefoed (1979), has the advantage of wide applicability and relatively small memory requirement.
In the frequency domain approach (Ghosh 1971) the filter coefficients essentially comprise a finite set of samples of what has been called the sinc-response of the$ function. The filter function is a unique function for a given transformat obtainable, in principle, by taking the inverse Fourier transform of the ratio of the Fourier transforms of the output and input functions. The sinc-response is then the function obtained by applying the filter at the input of an ideal low-pass filter with zero-phase shift, unity gain up to the band limit, and an infinitely sharp cut-off at angular frequency oo . Samples of the sinc-response at intervals less than or equal to n/oo then constitute the filter coefficients. The sampling interval is taken to be equal to n/oo in order to make use of the fact that the sinc-response is oscillatory at both extreme ends, with a period equal to 2n/00, and an appropriate shift of the samples makes the end coefficients decay very quickly in both directions. This approach does not consider a priori a small finite number of elements that is going to constitute the practical digital filter.
The Wiener-Hopf minimization method proposed by Koefoed (1979) is a more direct approach to the design of filters with a finite number of elements. However, this method requires the sampling interval T, as well as the shift a,, to be known at the start. If we fix these parameters by using the frequency domain concepts, we can only expect a shorter route to the same-or approximately the same-result.
Following a suggestion by Koefoed (1972), Nyman and Landisman (1977) have examined the effect of adjustments of the sampling interval T on the error performance of certain filter operators. In this study they kept the product of sample interval and number of samples approximately constant, and found that the error becomes low for some “optimum” sampling rates which made the filter function purely real at the Nyquist frequency n/T. For nonoptimum sampling rates they found that a nonlinear phase “perturbation ” applied to the filter function, forcing the phase angle to be a multiple of n at the Nyquist frequency, reduces the error.
The primary finding of the present study is the fact that very substantial improvements in the accuracy of digital filters with a small number of elements can be obtained by properly choosing the sample interval and the shift. That this should be so is not predictable from the frequency domain theory which starts with an infinite length filter.

5 10 D. GUPTASARMA
An N-point filter designed by the frequency domain approach can be improved by including more points at the ends, if we keep everything else the same. Our study shows that, for example, the optimum (N + 2)-point filter is not just the optimum N-point filter with two more filter coefficients thrown in. Since in our method the optimum value of T for an N-point filter is different from that for an ( N + 2)-point filter, the optimum (N + 2)-point filter is altogether different from the optimum N-point filter.
The method is applicable in all cases in which the frequency domain methods are applicable. Trials with Hankel and Fourier sine and cosine transforms show that similar improvements are also attainable in these cases. Filters for specific conversions from frequency domain to time domain and for amplitude-vs-frequency to phase-vs-frequency in minimum-phase systems have also been built.
There are applications in which two digital filters have to be combined linearly to get a third filter. In such cases the sampling intervals and shifts of the two filters must be the same. One can optimize one of the two filters according to the new method, and use for the other whatever coefficients are obtained by a Wiener-Hopf minimization with the same values of a,,-T. The filter which is going to have a larger weight in the linear combination should be chosen as the one to be optimized. If an unevenly spaced filter is tolerable, both the filters may be optimized. This, however, requires that the input function be computed for all filter abscissae for each evaluation of the output function. In the case of equally spaced filters much saving in computation time is obtained by reusing already computed values of the input function.
In any situation in which a preassigned sampling interval is unavoidable, the optimization search can be limited to a search over a, alone for the preassigned T .
It appears to us that the advantage of the new method will be lost if N is very large. For large values of N the errors should be of the same order as those of filters designed by any of the frequency domain approaches. In any case, the new method is going to be too laborious for very large N. The upper limit of N beyond which the new method would produce only marginally more accurate filters would obviously depend on the transformation in question. However, for all commonly used short filters the design method presented here could be used either for reducing computation time, or for increasing accuracy, or for both.
ACKNOWLEDGMENTS The work was supported by project No. IND/74/012, sponsored jointly by the UNDP and the Government of India, at the National Geophysical Research Institute (CSIR), Hyderabad. The author is grateful to the Director, NGRI, for his kind permission to publish this paper.
APPENDIX The design and test functions for generating the filters presented herein were formulated using two convenient transform pairs suggested by Koefoed (1979,

D I G I T A L FILTERS F O R GEOELECTRIC D A T A 511
pp. 8688) to simulate two- and three-layer cases of resistivity sounding for the purpose of testing resistivity filters.
These transforms are :
I. For descending type two-layer case
Resistivity transform
T,(1) = pz + (p1 - pz)A1/(1 + A212)1’2.
Schlumberger apparent resistivity
Pschl l(s) = PZ + ( P I - P2)(l + s /A) exp ( - s / A ) .
11. For ascending type two-layer case
Resistivity transform
Tz(4 = P 3 + (P4 - P3)P - exp (-B4I/Bn.
Schlumberger apparent resistivity
Pschl 2(s) = P3 + (P4 - P3)s / (Bz + sz)l’z.
In these transforms p1 and p3 simulate the upper layer resistivity and p z and p4 simulate the lower layer resistivity. A and B are constants which define the position on the abscissa where the transition from one asymptotic value to the other is located. 1 is the input function abscissa referring to our illustration and s, simulating the Schlumberger array size, is the output function abscissa.
Since any linear combination of input functions Tl(A) and Tz(I) would transform into the corresponding linear combination of Pschl l(s) and Js), these transformations are very convenient for building test function pairs of various shapes by adjusting the constants A and B and the ps.
We used ~ ~ ( 1 ) + T,(I) as the input function and + 2(s) as the output function with p1 = p4 = 1, pz = p 3 = 0.01, A = 0.01 and B = 100 for generating the 7- and 11-point filters. The same function was used for design as well as for determining E . This combination simulates a bowl-type resistivity sounding graph.
For the design of the 19-point filter the values of the ps and of A and B were kept the same, but the input function was 1 - Tl(I) - T’(1) and the output function was 1 - l(s) - Pschl z(s). The fact that this combination makes the input function cross the zero at two points of the abscissa only requires that the test domain be properly restricted. The transform pair is still valid, and simulates a bell-type function.
The illustrations in figs 1-4 use test input functions as indicated in each figure, with values of the ps and A and B as given in each case.
The filters were designed with logarithmic abscissa values in base-10. Corresponding abscissa values with natural logarithms were calculated therefrom. Abscissa values for the filter coefficients in both bases are given in tables A1-3.
The procedure for using these filters is as follows: Let T(I) be the resistivity transform of the ground, as defined by Koefoed (1979).

512 D. GUPTASARMA
Table Al. Seven-point filter. ~ ~~
Filter coefficient Abscissa Abscissa rounded to 4 (base- 10) (base-e) decimal places
-0.174 45 -0.401 685 969 48 0.173 2 0.096 72 0.222 706 030 18 0.294 5 0.367 89 0.847 098 029 86 2.147 0.639 06 1.47 1 490 029 56 -2.1733 0.91023 2.095 882029 16 0.664 6 1.1814 2.720 274 028 88 -0.121 5 1.452 57 3.344 666 028 5 0.015 5
We wish to evaluate the Schlumberger apparent resistivity for a spacing s. First determine K(1,) for r = 1 to N , using
A, = ~ O ( o r - l o ~ 1 O s ) 9
where a, are the base-10 abscissa values in tables A1-3. The Schlumberger apparent resistivity is then given by
N
~ s c d ~ ) = 1 dr K(1r) 1
where 4, are the filter coefficients corresponding to the abscissae a,.
as To use the base-e abscissae, instead of the base-10 values, 1, must be calculated
2 = - log. s) r
Table A2. Eleven-point filter.
Abscissa (base-10)
Filter coefficient Abscissa rounded to 6 (base-e) decimal daces
-0.420 625 - 0.202 656 25
0.015 3125 0.233 281 25 0.451 25 0.669 218 75 0.887 187 5 1.105 15625 1.323 125 1.541 093 75 1.759 062 5
- 0.968 524 854 74 - 0.466 633 260 21
0.035 258 334 23 0.537 149 928 69 1.039 041 523 21 1.540933 11765 2.042 824 712 17 2.544 716 306 69 3.046 607 901 13 3.548 499 495 63 4.050 391 090 11
~ ~~ ~
0.041 873
0.387 66 0.647 103 1.848 73
1.358 412
0.097 107
0.004 046
-0.022 258
- 2.960 84
-0.377 59
-0.024243

DIGITAL FILTERS F O R GEOELECTRIC DATA 513
Table A3. Nineteen-point jilter.
Filter coefficient Abscissa Abscissa rounded to 8 (base-10) (base-e) decimal places
- 0.980 685 0.OOO 971 12
-0.563 305 - 1.297 057 695 75 0.009 069 65 -0.354615 -0.816531 21272 0.014043 16 -0.145 925 -0.336 004 729 71 0.090 12
0.062 765 0.144521 753 35 0.301 715 82 0.271 455 0.625 048 236 41 0.996 270 84 0.480 145 1.10557471944 1.369 083 2
0.897 525 2.066 627 685 56 1.654 630 68
1.3 14 905 3.027 680 651 65 0.223 298 13
1.732 285 3.988 733 617 79 0.051 861 35
2.149 665 4.949 786 583 91 0.013 849 32
2.567 045 5.910839 55002 0.001 904 63
- 2.258 110 661 92 -0.771 995 - 1.777 584 178 89 -0.001 021 52
0.688 835 1.586 101 20252 -2.996811 71
1.106215 2.547 154 168 64 -0.593 992 77
1.523 595 3.508207 13474 -0.101 19309
1.940 975 4.469 260 100 83 - 0.027 486 47
2.358 355 5.430 313 066 96 -0.005 990 74
2.775 735 6.391 36603308 -0.000321 6
REFERENCES ANDERSON, W.L. 1975, Improved digital filters for evaluating Fourier and Hankel transform
integrals, Report No. USGS-GD-75-012, US Geological Survey, Denver, Colorado. DAS, U.C. and GHOSH, D.P. 1974, The determination of filter coefficients for the computation
of standard curves for dipole resistivity sounding over layered earth by linear digital filtering, Geophysical Prospecting 22, 765-780.
DAS, U.C., GHOSH, D.P. and BIEWINGA, D.T. 1974, Transformation of dipole resistivity sounding measurements over layered earth by linear digital filtering, Geophysical Prospecting 22,47&489.
GHOSH, D.P. 1971, The application of linear filter theory to the direct interpretation of geoelectrical resistivity sounding measurements, Geophysical Prospecting 19, 192-2 17.
JOHANSEN, H.K. and SBRENSEN, K. 1979, Fast Hankel transforms, Geophysical Prospecting 27,87&901.
KOEFOED, 0. 1972, A note on the linear filter method of interpreting resistivity sounding data, Geophysical Prospecting 20,403-405.
KOEFOED, 0. 1976, Error propagation and uncertainty in the interpretation of resistivity sounding data, Geophysical Prospecting 24,3 1-48.
KOEFOED, 0. 1979, Geosounding principles. 1. Resistivity sounding measurements, Vol. 14A in Methods in Geochemistry and Geophysics, Elsevier, Amsterdam.
KOEFOED, 0. and DIRKS, F.J. 1979, Determination of resistivity sounding filters by the Wiener-Hopf least squares method, Geophysical Prospecting 27,245-250.

514 D . GUPTASARMA
KUMAR, R. and DAS, U.C. 1977, Transformation of dipole to Schlumberger sounding curves
NYMAN, D.C. and LANDISMAN, M. 1977, VES dipole4ipole filter coefficients, Geophysics 42, by means of digital linear filters, Geophysical Prospecting 25, 78&789.
1037-1 044.